Modelo para Estimar Fuerzas Musculares en la Marcha: Pre
Anuncio

1
Modelo para Estimar Fuerzas Musculares en
la Marcha: Pre-análisis para el Tratamiento
Clínico de Pacientes con Parálisis Cerebral
Ravera Emiliano P., Catalfamo Paola A., Crespo Marcos J., Braidot Ariel A.
FI-UNER, FLENI, emilianoravera@bioingenieria.edu.ar,+54 (343) 4975078 / 101 interno 121, Ruta
11 Km 10 Oro Verde-Entre Ríos
Resumen— La marcha agazapada es la causa más común
de incapacidad física en chicos con parálisis cerebral (CP,
cerebral palsy) del mundo moderno y dentro de las unidades
traumatológicas y ortopédicas infantiles.
Esta marcha patológica va empeorando progresivamente
con el tiempo, decrementando su efectividad y conduciendo a
una degeneración de las articulaciones. Así, esta patología se
suele tratar mediante cirugías y técnicas ortopédicas.
El principal problema es predecir qué pacientes se
beneficiaran con este tipo de cirugía. Una razón a esto es que
existen numerosos factores músculo-esqueléticos y de control
motor que contribuyen al desarrollo de esta marcha
patológica.
Mejoras del tratamiento de estos movimientos anormales en
personas con CP presentan un gran desafío en la actualidad
dado a que no existen bases teóricas para determinar las
causas biomecánicas de esta marcha anormal. Así, una
correcta determinación de la etiología de estos patrones
anormales es la clave para seleccionar la terapia apropiada.
La estimación de las fuerzas musculares individuales son
parámetros importantes. Los métodos de modelización
matemática se utilizan para estimar las fuerzas individuales de
músculos en el cuerpo humano ya que sus mediciones directas
son difíciles o casi imposibles de realizar. El reconocimiento de
los patrones musculares durante la dinámica de marcha ofrece
una visión completa para análisis del movimiento.
Este trabajo presenta el uso de un modelo músculoesquelético en conjunto con un análisis tridimensional
cuantitativo del movimiento para la estimación de seis fuerzas
musculares individuales producidas en la marcha mediante el
modelado del muslo de los pacientes. Este modelo permite la
obtención del comportamiento tridimensional de las fuerzas
musculares implicadas en la marcha patológica que
desarrollan pacientes con CP y así lograr incrementar la
efectividad de las técnicas de tratamiento y rehabilitación de
los pacientes, de manera previa a la toma de decisión de qué
tratamiento realizar.
Palabras clave— Modelado y Simulación en Ortopedia,
Biomecánica
músculo-esquelética,
Herramienta
de
diagnóstico.
E
I. INTRODUCCIÓN
l manejo de las anormalidades de la marcha en chicos
con CP representa un gran desafío en la actualidad.
Cirugías músculo-esqueléticas y otros tratamientos
ortopédicos son comúnmente prescriptos en un esfuerzo de
mejorar la alineación de los miembros del paciente,
previniendo la progresión de la deformaciones de los
huesos, y aumentando la habilidad de caminar [1].
La interacción de contracturas articulares, músculos
débiles, deformaciones óseas e inestabilidad de las
articulaciones llevan al desarrollo de una marcha
agazapada, mostrando múltiples efectos en la calidad y
eficiencia de la marcha y otros aspectos de funciones físicas
en chicos con CP ambulatorios [2].
Las simulaciones mecánicas del sistema músculoesquelético son un tema de fundamental importancia en
investigación así como también en prácticas de ingeniería y
aplicaciones médicas [3]. Estos modelos proveen
información que no se identifica inmediatamente desde un
análisis cinemático de la marcha o test musculares estáticos,
siendo relevantes para un correcto tratamiento de estos
pacientes [4].
Idealmente, las recomendaciones para una cirugía
ortopédica podrían estar basadas en una descripción
cuantitativa de cómo se alterarán probablemente las
propiedades musculares de generación de fuerza, y el
conocimiento de cómo estas alteraciones probablemente
influenciarán la marcha de los pacientes [5].
Diferencias en el contexto mecánico del sistema músculo
tendón durante el movimiento, como cambios en el brazo
de palanca y la posición entre la fuerza, longitud y
velocidad, pueden corresponderse con los diferentes niveles
de actividad alcanzados pudiendo obviamente influir la
efectividad del músculo en la generación de momento neto
en la articulación, y consecuentemente en la contribución
motora instantánea [6]. De esta forma, la identificación
expresa de la anomalía no presenta una solución directa [7].
Mejoras del tratamiento de la marcha agazapada y otros
movimientos anormales en personas con CP presentan un
gran desafío en la actualidad dado a que no existen bases
teóricas para determinar las causas biomecánicas de la
marcha anormal de estos pacientes [8] [9] [10].
Planear un tratamiento es todavía más complicado
porque no existen bases científicas para determinar como el
deterioro
neuro-músculo-esquelético
contribuye
al
movimiento anormal [1]. Así, una correcta determinación
de la etiología de los patrones anormales de la marcha es la
clave para seleccionar la terapia apropiada [11].
Las causas de una progresiva marcha agazapada y el
apropiado tratamiento correctivo son difíciles de determinar
porque los movimientos generados por las fuerzas
musculares durante la marcha de estos pacientes no son
comprendidos con claridad [12] [13].
Las fuerzas musculares producidas por las personas en
las tareas diarias y ocupacionales y actividades atléticas son
importantes de cuantificar; el conocimiento de esto tiene
numerosas aplicaciones en la biología humana, ortopedia y
control motor. Diferentes métodos de modelado
matemático, incluidos optimización estática, son usados
para estimar la fuerza individual en el cuerpo humano dado
que mediciones directas son difíciles de tomar. La exactitud
de la predicción de la fuerza muscular depende de la
función objetivo usada en la optimización estática y
2
parámetros del modelo (grados de libertad, suposiciones del
modelo, modelado muscular, etc.) [14].
El sistema motor humano posee varios grados de libertad
y a su vez presenta más músculos que grados de libertad,
esto es llamado redundancia. Debido a esta redundancia, un
trabajo motor, por ejemplo la marcha, puede ser realizada
de diferentes formas y numerosas combinaciones de fuerzas
musculares pueden generar el mismo torque articular. Sin
embargo, los patrones de activación muscular (MAP,
muscle activation patterns) de diferentes personas que
realizan la misma tarea bien aprendida son similares [15].
Mediciones de fuerzas musculares durante la locomoción
de animales muestra que los patrones de fuerza muscular
están estereotipados para un determinado movimiento [16].
Estas consistencias llevan a pensar que en el control de
fuerzas musculares individuales, el sistema nervioso central
usa principios específicos que son los mismos para
diferentes personas. Así se llega a la hipótesis que el
sistema nervioso central selecciona óptimos MAP bajo
criterios que son desconocidos [15].
La suposición que el sistema nervioso central, en cierto
sentido trata de minimizar la carga sobre los músculos y el
organismo en general conduce a la hipótesis de que la
fuerza muscular desconocida puede encontrarse como la
solución a un problema de optimización [3].
Estas ideas hacen atractivo el uso de optimización
matemática para buscar los principios fisiológicos óptimos
que lleven a explicar el mecanismo y el significado
funcional de las fuerzas observadas en el comportamiento
sinérgico muscular [16].
Este trabajo presenta el uso de un modelo músculoesquelético en conjunto con un análisis tridimensional
cuantitativo del movimiento para la estimación de seis
fuerzas musculares individuales producidas en la marcha
mediante el modelado del muslo de los pacientes. Este
modelo permite la obtención del comportamiento
tridimensional de las fuerzas musculares implicadas en la
marcha patológica que desarrollan pacientes con CP y así
lograr incrementar la efectividad de las técnicas de
tratamiento y rehabilitación de los pacientes, de manera
previa a la toma de decisión de qué tratamiento realizar.
II.
MÉTODO
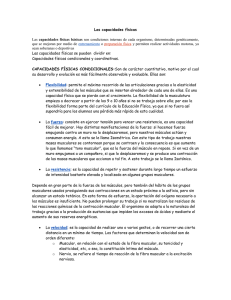
A. Sistema Mecánico
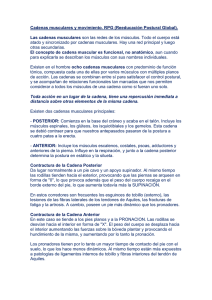
Es sistema mecánico (Fig. 1) propuesto está compuesto
por la pelvis, fémur, tibia y seis músculos. Cuatro de los
músculos se consideran biarticulares: tensor de la fascia lata
(TFL), semimembranoso (SM), sartorio (S) y recto anterior
(R); y dos monoarticulares: glúteo (G) e ilíaco (I).
El origen, inserción y el área de sección transversal
fisiológica (PCSA, physiological cross-seccion area) de los
músculos están descriptos en la Tabla I.
Las posiciones de las áreas correspondientes al origen e
inserción de todos los músculos son estimados como
desplazamientos ponderados por el ancho de la cadera,
muslo o rodilla según corresponda, en sistemas de
referencias locales que siguen el movimiento de los
segmentos correspondiente [18].
Fig. 1: Esquema de Sistema Mecánico Modelado.
Este modelo presenta seis grados de libertad (DoF,
degree of freedom), tres DoF correspondientes a la
articulación de la cadera y tres DoF a la rodilla.
Las direcciones musculares son estimadas como la
dirección lineal entre el origen e inserción de cada músculo.
En el caso del recto su dirección se modela, pensando que
el mismo sigue la dirección de la pierna en su inserción.
Las direcciones verticales de las inserciones musculares son
corregidas en función del ángulo de inserción (Tabla II),
simulando la masa muscular que se encuentra entre estos
músculos y la posición de su inserción (1) [19].
TABLA II
ÁNGULOS DE INSERCIÓN MUSCULAR [17]
TFL
SM
S
R
G
I
TABLA I
PCSA, ORIGEN E INSERCIÓN DE LOS MÚSCULOS DEL MODELO [17]
PCSA XO
YO
ZO
XI
YI
ZI
cm
%
%
%
%
%
%
TFL
5,9
11,4
26,6
12,5
3,0
15,2
20,8
SM
28,9 22,21
18,2
0,0
21,3
17,7
3,7
S
8,8
11,4
26,6
12,5
31,3
17,7
3,7
R
17,1
11,4
13,3
6,3
35,2
0,0
0,0
G
13
(***) (***) (***) 31,18(*) 6,3(**) 15,5(*)
I
60,8 (****) (****) (****) 31,18(*) 8,3(**) 21,5(*)
(*) Estimaciones propias de este modelo.
(**) Proporciones de la altura del paciente.
(***) Posición media entre espinas ilíacas superiores anterior y posterior.
(****) Posición estimada 1 cm detrás del origen del músculo glúteo.
Músculos
β (°)
Músculos
0
25
0
22
0
25
d *i , y = di , y ∗ sen(90 + β )
(1)
B. Matriz brazo de Momento Muscular
El momento total de los seis músculos actuando sobre el
segmento muslo pueden ser escritos como el producto de
una matriz brazo de momento B y un vector de fuerzas
[20] [19]:
6
6
r
r
r r
r r
M = ∑ ri × Fi = ∑ ri × d i Fi = BF
i =1
i =1
r
F
(2)
3
De esta manera B es una matriz de 6 × 6 que contiene
r
r
los brazos de momento ri en las tres direcciones, y F es
un vector de 6 × 1 que contiene las amplitudes de las
fuerzas musculares. A (2) se llega mediante la formulación
de un sistema que involucra las dinámicas articulares de la
r
cadera y la rodilla. El vector momento neto M se
construye como un vector formado por los momentos netos
de la cadera en sus tres primeras componentes y los
momentos en la rodilla en las componentes restantes (3).
[
r
r
M = M cadera
r
0.85 ∗ M rodilla
]
'
(3)
En el presente trabajo se utiliza una función de
optimización polinómica de orden 10 y PCSA como el
factor normalizador de la ecuación. A estos valores se llega
de forma práctica al evaluar el comportamiento que se
observa del modelo para diferentes órdenes. Estas pruebas
llevaron a observar lo expresado por otros autores [15], que
muestran la dependencia del orden con los DoF del modelo,
siendo mayores ordenes a mayor es DoF.
De esta forma el problema de optimización planteado en
este trabajo viene dado por (5).
Mínimo G ( f i ( M ) )
f
sujeto a
C∗ f =r
El factor 0,85 de (3) corresponde a un factor de diseño
del modelo presentado dado a la no intervención de
músculos de la pierna en este modelo.
C. Problema de Optimización
La principal suposición en estos modelos de
optimización es que los MAP son seleccionadas de tal
manera que se optimice una específica función objetivo o
una combinación de funciones objetivos.
En modelos estáticos, se asume que los MAP en
cualquier instante de tiempo son independientes. En
optimizaciones estáticas, la activación y/o fuerza muscular
son calculadas por cada instante de tiempo del movimiento
[15].
Las fuerzas musculares se encuentran restringidas por
dos limitaciones fisiológicas: (i) los músculos pueden
proveer solamente fuerzas de contracción y (ii) estas
fuerzas están limitadas por un valor máximo. La fuerza
máxima de cada músculo Fi máx es estimada como
proporcional a la PCSA de cada músculo de acuerdo a la
2
máx
= k ∗ PCSA i , con k = 40 N / cm
clásica ley de Fick Fi
[20] [15].
Varios investigadores intentan realizar un modelo
computacional para estimar la fuerza muscular mediante la
utilización de funciones costo a optimizar de forma
polinomial (4) [3].
r (M ) n(M ) ⎛ f (M ) ⎞ p
G ( f ) = ∑ ⎜⎜ i ⎟⎟
i =1 ⎝ N i ⎠
Donde f i
(M )
(4)
representa a la amplitud de fuerza de los
n ( M ) músculos involucrados en el modelo. N i son los
factores de normalización de la función, dentro de los
cuales pueden ser la fuerza muscular máxima, el área
fisiológica de sección transversal (PCSA), o la fuerza
muscular instantánea en condiciones de trabajo comunes ya
computados [15].
En general, los criterios polinomiales describen sólo
condiciones fisiológicas si son complementadas con
restricciones que prevengan que las fuerzas musculares
individuales excedan su máximo fisiológico cuando las
cargas externas se incrementan. Estos requerimientos de
restricciones adicionales disminuyen cuando la potencia p
se incrementa [3].
El comportamiento fisiológico que muestra este criterio
es la minimización de la fatiga muscular [15]. A su vez se
vio que este criterio polinómico converge a otros criterios
que minimizan el stress muscular a medida que aumenta el
orden [3].
y
{
f i ≥ 0 i ∈ 1,..., n ( M )
Donde C ∗ f = r esta dado por (2).
(M )
(5)
}
D. Implementación
La implantación de este modelo es llevada a cabo
mediante MatLab (www.mathworks.com). Los valores de
momentos netos articulares son obtenidos mediante un
modelo biomecánico tridimensional del miembro inferior
[18]. El problema de optimización es llevado a cabo
mediante la resolución con fmincon de la librería de
optimización de MatLab.
La validación del modelo se realiza con el registro de un
paciente sin patologías del movimiento en el laboratorio de
Marcha y Estudios de Movimientos de FLENI empleando
un sistema de captura de movimiento ELITE (BTS, Italia)
con 8 cámaras infrarrojas de 100Hz de velocidad de
adquisición y dos plataformas de fuerza Kistler.
El paciente instrumentado con un conjunto de
marcadores reflectivos, camina por la pista de marcha
mientras el sistema registra la posición de los marcadores
en el espacio y combina esta información con la fuerza de
reacción del piso medida en el momento en que el paciente
pisa una de las plataformas.
III.
RESULTADOS
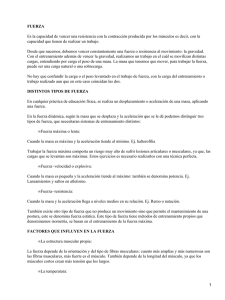
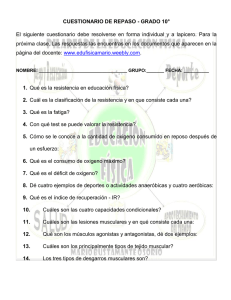
Observamos que se ve la co-activación reciproca de
músculos antagonistas monoarticulares como en el caso de
los músculos Ilíaco y Glúteo (Fig. 2) y entre el Tensor de la
Fascia Lata y el Semimembranoso (Fig. 3).
Fig. 2: Fuerzas musculares, I (azul) y G (verde)
4
IV. DISCUSIÓN
Fig. 3: Fuerzas musculares, TFL (azul) y SM (verde)
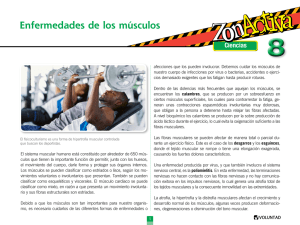
En la Fig. 4 se ve una simultánea activación de músculos
que cruzan la misma articulación como es el caso de los
músculos Sartorio y Recto anterior.
Fig. 4: Fuerzas musculares, S (azul) y R (verde)
Se muestra la co-activación de músculos antagonistas
actuando en una misma articulación como es el caso de los
resultados que vemos en la fuerza del Semimembranoso e
Ilíaco, Fig 5.
Las funciones costo utilizadas en los problemas de
optimización que representen la fatiga muscular y costo
metabólico, como las polinomiales, pueden predecir: (i) la
co-activación reciproca de músculos antagonistas
monoarticulares; (ii) co-activación sinérgica de una
articulación con sus antagonistas biarticulares; (iii)
simultanea activación de músculos que cruzan la misma
articulación; y (iv) una fuerte relación entre la fuerza y la
activación de los músculos de dos conjuntos y los
momentos en las dos articulaciones.
Todas estas características de la coordinación muscular
se observan, en cierta medida, en el MAP de tareas
especializadas realizadas con un esfuerzo submáximo y de
manera estereotipada (Fig. 6) [15].
Para seleccionar un criterio de optimización para la
interpretación de MAP uno debe tener en cuenta tres
factores: (i) posibilidad de medir el comportamiento del
criterio, por ejemplo obteniendo el error de las predicciones
si la medición de la fuerza es posible; (ii) el significado
fisiológico de la función costo; y (iii) la disponibilidad de
mecanismos fisiológicos razonables que puedan
implementarse mediante un determinado criterio [15].
Estas observaciones realizadas por otros investigadores
en trabajos previos continúan siendo evidentes en este
modelo propuesto. A su vez se vio que para obtener
resultados similares a los mostrados en otros modelos más
simplificados [15] se requirió una función de optimización
de mayor orden. Este punto presenta gran correlación con el
hecho de que el modelo presentado en este trabajo tiene
mayores DoF.
De esta forma vemos que minimizar criterios de fatiga o
stress muscular son razonables para ser evaluados en
actividades donde se desarrollan esfuerzos submáximos
como en la marcha del paciente.
V. CONCLUSIONES
Fig. 5: Fuerzas musculares, SM (azul) e I (verde)
Fig. 6: Fuerzas musculares resultantes del modelo. Valores promedios
de los valores observados en la pierna derecha e izquierda de persona
normal (m=17 Kg., h=1.05 m)
Los principales obstáculos que tienen estos modelos son:
los modelos propuestos son incompletos anatómicamente y
fisiológicamente, la insuficiente exactitud de los parámetros
de los mismos y la dificultad de validarlos.
Asimismo se observa en este trabajo y en investigaciones
previas la potencialidad que brindan este tipo de modelos
para comenzar a comprender de manera clara y precisa de
qué manera están actuando grupos musculares particulares
en las patologías del movimiento de pacientes con CP.
Si bien se observa que una de las principales limitaciones
de estos modelos es la cantidad de músculos considerados,
en particular este modelo músculo-esquelético considera los
seis músculos más representativos del segmento muslo.
En este trabajo se muestra un modelo con seis músculos
y seis DoF que obtiene estimaciones de fuerzas musculares
con alta concordancia con modelos existentes [3] [15] [16]
y fenómenos motrices-articulares en personas sanas.
La continuidad de este trabajo se enmarca con estas
líneas de investigación [18], que tienen como objetivo final
realizar el análisis de alteraciones del tono muscular del
muslo en pacientes con CP que desarrollan una marcha
agazapada.
Se observa que para el análisis de pacientes con CP se
requerirá un análisis más exhaustivo de qué criterio de
optimización interpretará de mejor manera una marcha
agazapada, dado que en estas circunstancias existe una alta
5
probabilidad de que el enfoque de minimización de gasto
metabólico no sea el de mayor importancia en pacientes que
presentan habilidades motrices muy limitadas.
[17]
AGRADECIMIENTOS
M.D. Klein Horsman, H.F.J.M. Koopman, F.C.T. Van der
Helm, L. Poliacu Prosé, and H.E.J. Veeger, "Morphological
muscle and joint parameters for musculoskeletal modelling of the
lower extremity," Clinical Biomechanics, no. 22, pp. 239-247,
2007.
[18]
Emiliano Pablo Ravera, Marcos Crespo, Paola Andrea
Catalfamo, and Ariel Andrés Braidot, "Model to Estimate
Hamstring Behavior in Cerebral Palsy Patient: As a Pre_Surgical
Clinical Diagnosis Tool," in 32th Annual International
Conference of the IEEE Engineering in Medicine and Biology
Society, Buenos Aires, 2010.
[19]
D. A. Winter, Biomechanics and Motor Control of Human
Movement, Second edition ed.: Wiley-Interscience, 1990.
[20]
Alexandre Terrier, Martin Aeberhard, Yvan Michellod, and
Philippe Mullhaupt, "A musculoskeletal shoulder based on
pseudo-inverse and null-space aptimization," Medical
Engineering & Physics, vol. xxx, no. xxx, pp. xxx-xxx, 2010,
doi: 10.1016/j.medengphy.2010.07.006.
Los autores de este trabajo quieren agradecer al Instituto
de Investigación Neurológica FLENI por proveer de datos
de pacientes para este trabajo.
REFERENCIAS
[1]
A. S. Arnold and S. L. Delp, "Computer modeling of gait
abnormalities in cerebral palsy:application to treatment
planning," Theoretical Issues in Ergonomics Science, no. 6, pp.
305-312, 2005.
[2]
Unni G. Narayanan, "The role of gait analysis in the
orthopaedic management of ambulatory cerebral palsy," Current
Opinion in Pediatrics, no. 19, pp. 38-43, 2007.
[3]
John Rasmussen, Michael Damsgaard, and Michael Voigt,
"Muscle recruitment by the min/max criterion-a comparative
numerical study," Journal of Biomechanis, vol. 34, pp. 409-415,
2001.
[4]
Scott L. Delp, Allison S. Arnold, Rosemary A. Speers, and
Carolyn A. Moore, "Hamstrings and psoas lenghts during normal
and crouch gait: Implication for muscle-tendon surgery," The
Journal of Orthopaedic Research, no. 1, pp. 144-151, 1996.
[5]
Allison S. Arnold, Silvia S. Blemker, and Scott L. Delp,
"Evaluation of a Deformable Musculoskeletal Model for
Estimating Muscle-Tendon Lengths During Crouch Gait,"
Biomedical Engineering Society, no. 29, pp. 263–274, 2001.
[6]
Paolo Crenna, "Spasticity and ‘Spastic’ Gait in Children with
Cerebral Palsy," vol. 22, no. 4, pp. 571–578, 1998.
[7]
Allison S. Arnold, May Q. Liu, Michael H. Schwartz, Sylvia
Ounpuu, and Scott L. Delp, "The role of estimating muscletendon lengths and velocities of the hamstrings in the evaluation
and treatment of crouch gait," Gait & Posture, no. 23, pp. 273281, 2006.
[8]
Allison S. Arnold, F. C. Anderson, M. G. Pandy, and S. L.
Delp, "Muscular contributions to hip and knee extension during
the single limb stance phase of normal gait: a framework for
investigating the causes of crouch gait," Journal of
Biomechanics, no. 38, pp. 2181-2189, 2005.
[9]
A. S. Arnold, S. Salinas, D. J. Asakawa, and S. L. Delp,
"Accuracy of muscle moment arms estimate from MRI-Based
musculoskeletal of the lower extremity," Computer Aided
Surgery, no. 5, pp. 108-119, 2000.
[10]
Marjolein M. Van der Krogt, Caroline A.M. Doorenbosch,
Jules G. Becher, and Jaap Harlaar, "Walking speed modifies
spasticity effects in gastrocnemius and soleus in cerebral palsy
gait," Clinical Biomechanics, no. 24, pp. 422-428, 2009.
[11]
H. G. Chambers, "Treatment of functional limitations at the
knee in ambulatory children with cerebral palsy," European
Journal of Neurology, vol. 5, no. 8, pp. 59-74, 2001.
[12]
J. L. Hicks, M. H. Schwartz, A. S. Arnold, and S. L. Delp,
"Crouched postures reduce the capacity of muscles to extend the
hip and knee during the single-limb stance phase of gait," Journal
of Biomechanics, no. 41, pp. 960–967, 2008.
[13]
Allison S. Arnold and Scott L. Delp, "The role of
musculoskeletal models in patient assessment and treatment,"
Clinics in developmental medicine, no. 164/165, pp. 165-179,
2004.
[14]
Rositsa T. Raikova and Boris I. Prilutsky, "Sensitivity of
predicted muscle forces to parameters of the optimization-based
human leg model revealed by analytical and numerical analyses,"
Journal of Biomechanics, vol. 34, pp. 1243-1255, 2001.
[15]
Boris I. Prilutsky and Vladimir M. Zatsiorky, "OptimizationBased Models of Muscle Coordination," Exerc. Sport Sci., no. 1,
pp. 30-43, January 2002.
[16]
B. I. Prilutsky, W. Herzog, and T. L. Allinger, "Forces of
individual cat ankle extensor muscle during locomotion predicted
using static optimization," Journal of Biomechanics, vol. 30, no.
10, pp. 1025-1033, 1997.