PROBLEMAS DE AUTOMATIZACIÓN
Anuncio

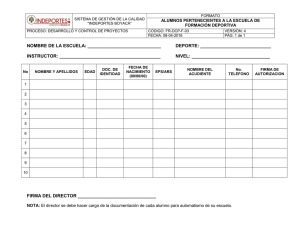
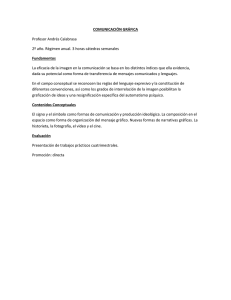
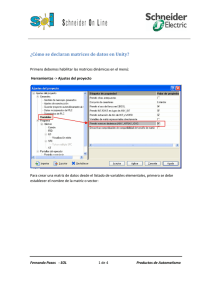
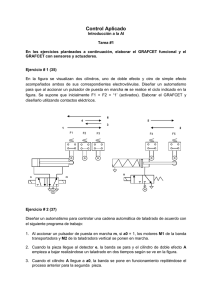
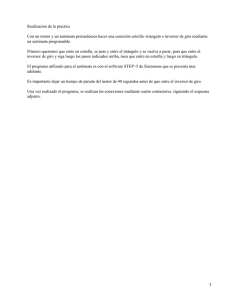
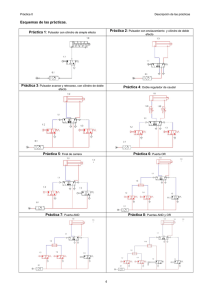
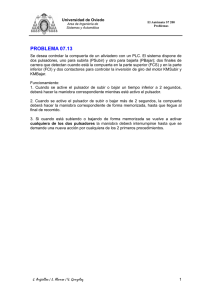
PROBLEMAS DEL 3º TRIMESTRE TECNOLOGÍA 4º ESO PROBLEMAS DE AUTOMATIZACIÓN 1º) Diseñe el automatismo de control de un motor de corriente continua atendiendo a las siguientes condiciones: • La conexión de fuerza del motor se realizará a través de un relé electromagnético denominado KA1 • Para el mando del automatismo se dispondrá 1 pulsador de parada (PARO) y un pulsador para la puesta en funcionamiento (MARCHA). • Partiendo del estado de reposo del motor, al pulsar momentáneamente MARCHA el motor se pondrá en funcionamiento, siguiendo activo aún después de soltar el pulsador. • Si se activa el pulsador de PARO el automatismo quedara en el estado de reposo. • Si se activan simultáneamente MARCHA y PARO, prevalece la parada del motor sobre la su puesta en marcha. Se pide: a) Descripción del funcionamiento. (consiste en copiar lo anterior). b) Tabla de símbolos. c) Esquemas de fuerza y maniobra del automatismo. d) Programa en lista de instrucciones e) Esquema de conexión al autómata. 2ª) Diseñe el automatismo de control de un motor de corriente continua atendiendo a las siguientes condiciones: • La parte de fuerza se realizará por medio de dos relés electromagnéticos (KA1 para el giro a derechas y KA2 para el giro a izquierdas). • La maniobra del automatismo se realizará a través de un autómata programable TWIDO de la marca TELEMECANIQUE. • El automatismo dispondrá de tres pulsadores de entradas: o Uno para la parada del motor: PARO. o Uno para la marcha con sentido de giro a derechas (sentido de las agujas del reloj): MARCHA_D o Uno para la marcha con sentido de giro a izquierdas (sentido contrario al de las agujas del reloj): MARCHA_I • El automatismo cumple las siguientes condiciones: o Si el pulsador de PARO está activo (pulsado) el motor no se pondrá en funcionamiento, aún en el caso, de pulsar MARCHA_D y/o MARCHA_I. o Para cambiar de sentido de giro, necesariamente se habrá de pasar previamente por el estado de parada; de esta forma, si el motor se encuentra girando; por ejemplo, a derechas, y se activa (se pulsa) el pulsador de MARCHA_I, el motor continuará girando a derechas hasta que no se pulse PARO. Se pide: f) Descripción del funcionamiento. (consiste en copiar lo anterior). g) Tabla de símbolos. h) Esquemas de fuerza y maniobra del automatismo. i) Programa en lista de instrucciones j) Esquema de conexión al autómata. 3º) Se desea controlar la posición de un paquete, cuando se desplaza en una cinta transportadora, mediante 2 pilotos de señalización L1 y L2 . El piloto L1 se enciende cuando se activa el relé KA1, en tanto que, el piloto L2 se enciende cuando se activa el relé KA2. Para detectar la posición del paquete se dispone de 3 finales de carrera de roldada (con rueda) DT1, DT2 y DT3. El funcionamiento del automatismo debe ser el siguiente: • • En cuanto el paquete toca DT1 se enciende el piloto 1 (L1), permaneciendo encendido hasta que el paquete llegue a la posición del final de carrera DT2. Ha de tenerse en cuenta que hay un espacio de tiempo, mientras el paquete se desplaza entre las posiciones de DT1 y DT2, que aún sin estar activado ningún final de carrera el piloto L1 sigue encendido. Cuando se activa el final de carrera DT2, además de apagarse L1, se encenderá L2, permaneciendo encendido hasta que se active DT3. Del mismo modo, hay un espacio de tiempo, I.E.S. ANDRÉS DE VANDELVIRA. 1 PROBLEMAS DEL 3º TRIMESTRE TECNOLOGÍA 4º ESO mientras el paquete se desplaza entre las posiciones de DT2 y DT3, que aún sin estar activado ningún final de carrera el piloto L2 sigue encendido. L2 L1 DT1 DT2 DT3 Diseñe el circuito y el programa que permite cumplir las condiciones del automatismo indicado. Se pide: k) Descripción del funcionamiento. (consiste en copiar lo anterior). l) Tabla de símbolos. m) Esquemas de fuerza y maniobra del automatismo. n) Programa en lista de instrucciones o) Esquema de conexión al autómata. 4º) Diseñe el automatismo de control de una barrera con semáforo atendiendo a las siguientes condiciones: • Supondremos como estado de reposo el que tiene el sistema con la barrera subida estando activo (pulsado) el final de carrera Fa. • El automatismo dispondrá de dos pulsadores SUBIDA y BAJADA para el control del movimiento de la barrera. • La parte de fuerza se realizará por medio de dos relés electromagnéticos (KA1 para el giro a derechas que provoca la bajada de la barrera y KA2 para el giro a izquierdas, que provoca su subida). • El motor se detendrá automáticamente al activar los finales de carrera, no permitiendo el giro a derechas si la barrera está subida ni el giro a izquierdas si está bajada. • La puesta en marcha de la barrera se realizará mediante una pulsación momentánea del pulsador correspondiente. • En caso de pulsar simultáneamente ambos pulsadores prevalecerá el de BAJADA sobre el de SUBIDA. • La lámpara Verde del semáforo estará encendida únicamente cuando este la barrera totalmente subida, en el resto de los estados posibles del automatismo estará encendida la lámpara Roja y apagada la verde. Se pide: a) Descripción del funcionamiento. (consiste en copiar lo anterior). b) Tabla de símbolos. c) Esquemas de fuerza y maniobra del automatismo. d) Programa en lista de instrucciones e) Esquema de conexión al autómata. R V Fb Fa I.E.S. ANDRÉS DE VANDELVIRA. 2 PROBLEMAS DEL 3º TRIMESTRE TECNOLOGÍA 4º ESO 5ª) Diseñe el sistema de automatización de la taladradora de la figura atendiendo a las siguientes condiciones: • • • • • • • Supondremos que el estado de reposo se corresponde con la posición que tiene la taladradora en la figura. NOTA: El final de carrera FA está desactivado. La taladradora dispone de dos motores: El MOTOR_1 es el que controla la bajada y subida del brazo de la taladradora a través de los relés electromagnéticos KA1 y KA2 , el el MOTOR_2 controla el giro de cabezal portabrocas mediante los relés electromagnéticos KA3 y KA4 Al pulsar momentáneamente el pulsador de marcha comenzará la bajada del brazo del portabrocas, pero sin que éste gire. Cuando se activa el final de carrera FB comienza el giro a derechas del cabezal mientras que continua bajando. Cuando se active el final de carrera FC se entenderá que ya está taladrada la pieza, y se invertirá el sentido de giro de ambos motores, para que de esta forma comience el movimiento de ascensión y de giro a izquierdas. Al dejar de activar el final de carrera FB el cabezal portabrocas dejara de girar, pero continuará subiendo hasta dejar de activar el final de carrera FA en que el sistema quedará en estado de reposo en espera de un nuevo ciclo. Mientras que esté ejecutándose el ciclo de la taladradora el pulsador de MARCHA será inoperante. Se pide: a) Descripción del funcionamiento. (consiste en copiar lo anterior). b) Tabla de símbolos. c) Esquemas de fuerza y maniobra del automatismo. d) Programa en lista de instrucciones e) Esquema de conexión al autómata. 6ª) La siguiente figura representa un depósito de agua cuyo funcionamiento está automatizado según la secuencia y condiciones que se indican a continuación: - El motor está acoplado a una bomba de presión. - El motor se activa a través de un relé KA1, y la Electroválvula (E) se alimenta directamente desde el autómata. - Partiendo de estado de reposo (depósito vacío), al activar momentáneamente un pulsador de puesta en marcha ( MARCHA ), se pone en funcionamiento el motor encargado del llenado del depósito. - Cuando el agua llega a la altura de la boya ( S1 ) seguirá activo el motor y la electroválvula en posición de reposo y desactivada, impidiendo la salida del agua. - Cuando el nivel del agua llegue a la altura de la boya ( S2 ), se activa la electroválvula y I.E.S. ANDRÉS DE VANDELVIRA. 3 PROBLEMAS DEL 3º TRIMESTRE TECNOLOGÍA 4º ESO comienza a salir el líquido, permaneciendo el motor conectado. Al alcanzar el agua el nivel determinado por la boya ( S3 ) se para el motor, permaneciendo activa la electroválvula, y comenzando de esta forma el vaciado del depósito . - Mientras baja el nivel del líquido desde la boya ( S3 ) a la ( S1 ) permanecerá activa la electroválvula ( E ). - Al descender el nivel por debajo de la altura de la boya ( S1 ) se desactiva la electroválvula permaneciendo el automatismo en estado de reposo hasta una nueva pulsación de MARCHA. - Si se activa el pulsador de MARCHA mientras está descendiendo el nivel del agua, se pondrá en marcha el motor volviendo a realizar la secuencia indicada anteriormente. Se pide: a) Descripción del funcionamiento. (consiste en copiar lo anterior). b) Tabla de símbolos. c) Esquemas de fuerza y maniobra del automatismo. d) Programa en lista de instrucciones e) Esquema de conexión al autómata. - MOTOR Llenado del depo;sito S3 PULSADOR DE MARCHA S2 S1 Electroválvula Salida DEPÓSITO a) b) c) d) e) Se pide: Descripción del funcionamiento. (consiste en copiar lo anterior). Tabla de símbolos. Esquemas de fuerza y maniobra del automatismo. Programa en lista de instrucciones Esquema de conexión al autómata. I.E.S. ANDRÉS DE VANDELVIRA. 4