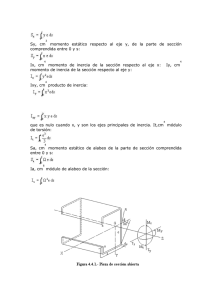
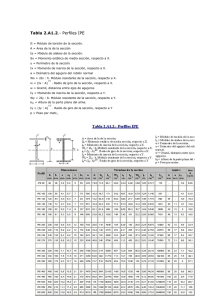
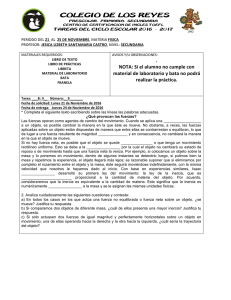
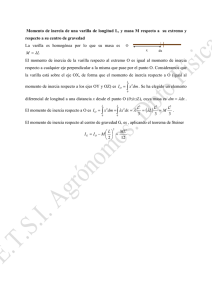
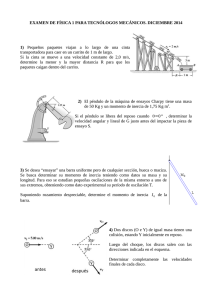
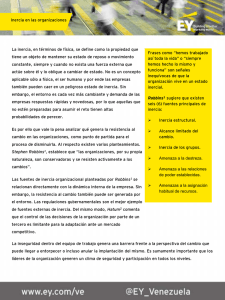
CALCULO DE MOMENTOS DE INERCIA Se unen cuatro partículas de masa m mediante varillas sin masa, formando un rectángulo de lados 2a y 2b. El sistema gira alrededor de un eje en el plano de la figura que pasa por su centro. a) Hallar el momento de inercia respecto de este eje. b) Hallar el I respecto de un eje paralelo al anterior que pase por las masas. c) Hallar el I respecto a un eje perpendicular al anterior y que pase por una masa. Solución: I.T.I. 02 a) Si aplicamos la definición de momento de inercia: I = ∑ mi Ri2 tenemos que: y ʹ′ y i Ix = 4 m b 2 , Iy = 4 m a2 2b b) Para calcular el momento de inercia respecto de los nuevos ejes podemos hacerlo aplicando la fórmula anterior o utilizando el teorema de Steiner: Ix ʹ′ = Ix + 4m b2 ⎫ ⎪ ⎬ 2 ⎪ Iy ʹ′ = Iy + 4m a ⎭ ⇒ x x ʹ′ 2a Ix ʹ′ = 8 m b2 , I y ʹ′ = 8m a2 c) El momento de inercia respecto de un eje perpendicular al plano de la figura y que pase por una de las masas (eje zʹ′ ) será: 2 2 [ 2 2 ] Iz ʹ′ = 0 + m (2a) + m (2b) + m (2a) + (2b) = 8 m ( a2 + b 2 ) Lo cual podríamos haber calculado teniendo en cuenta que todas las partículas de nuestro sistema se encuentran en un plano y podemos aplicar el teorema de los ejes perpendiculares: Iz ʹ′ = I x ʹ′ + Iy ʹ′ . € Física Tema Página 1 Calcular el momento de inercia respecto de un eje que pase por su centro de un disco de radio R y masa M al cual se le practica un agujero circular de radio R/4 centrado a una distancia R/2 del centro del disco. R/4 R R/2 Solución: I.T.I. 01, 04, I.T.T. 04 Podemos tratar dicho disco como la contribución de dos piezas: y y x y = – x 1 x 2 El momento de inercia respecto del eje Z de la pieza 1 será: Iz,1 = 1 1 1 1 M1 R12 = (σ π R12 ) R12 = σ π R14 = σ π R 4 2 2 2 2 Si llamamos Zʹ′ a un eje paralelo al eje Z y que pase por el centro de la pieza 2 utilizando el teorema de Steiner podemos calcular su momento de inercia respecto del eje Z: 2 Iz,2 = Iz ʹ′,2 2 2 1 1 ⎛ R ⎞ ⎛ R ⎞ ⎛ R ⎞ + M2 = M2 R22 + M 2 = (σ π R22 )R22 + (σ π R22 ) = ⎝ 2 ⎠ ⎝ ⎠ ⎝ 2 ⎠ 2 2 2 2 4 2 2 1 1 ⎡ R ⎤ ⎛ ⎡ R ⎤ ⎞ ⎛ R ⎞ ⎛ 9 ⎞ 4 2 ⎛ R ⎞ = σ π R2 + (σ π R2 ) = σ π ⎢ ⎥ + ⎜ σ π ⎢ ⎥ ⎟ = σ π R4 ⎝ 2 ⎠ ⎝ 512⎠ 2 2 ⎣ 4 ⎦ ⎝ ⎣ 4 ⎦ ⎠ ⎝ 2 ⎠ El momento de inercia de toda la placa será: Iz = Iz,1 − I z,2 = 1 9 247 ρπ R 4 − ρπ R 4 = ρπ R 4 2 512 512 Finalmente calculando el valor de la densidad superficial σ y sustituyendo: σ= Física M placa = A placa M placa π R2 − π ⎛ R ⎞ ⎝ 4 ⎠ 2 = 16 ⎛ M placa ⎞ 15 ⎜⎝ π R 2 ⎟⎠ Tema ⇒ Iz = 247 M R2 480 placa Página 2 Calcular los momentos de inercia respecto a su eje de simetría de los siguientes cuerpos: a) esfera homogénea, b) cilindro hueco de paredes delgadas, c) cilindro homogéneo hueco de radio interior a y exterior b, d) sistema formado por una barra cilíndrica de radio R y longitud L unida a dos esferas de radio 2R. Solución: I.T.I. 02 a) Coloquemos nuestro origen de coordenadas en el centro de la r R esfera. Si dividimos nuestra esfera en diferenciales de masa dm con forma de coraza esférica de radio r y espesor dr, todos los puntos de dicho dm se encuentran a la misma distancia del centro, por lo tanto si calculamos el momento de inercia polar de la esfera respecto de dicho centro nos dará: ⎛ ⎞ 5 R M R5 3 ⎜ ⎟ IO = ∫ r 2 dm = ∫ r2 ρ 4π r 2 dr = ρ 4π = ⎜ 4 4 π = M R2 ⎟ 5 5 5 3 0 ⎜ π R ⎟ ⎝ 3 ⎠ R Por simetría el momento de inercia respecto de los tres ejes coordenados X, Y y Z tiene el mismo valor Ix = I y = Iz , y además se verifica que: Ix + Iy + Iz = 2IO ⇒ I x = Iy = I z = 2 MR 2 5 b) En el cilindro hueco de paredes delgadas todos sus puntos se encuentran a la misma distancia del eje de simetría, con lo que su momento de inercia respecto de dicho eje será: I = MR2 dr c) En el caso del cilindro de radio interno a y externo b podemos dividirlo en corazas cilíndricas de radio r y espesor dr (todos los puntos de una de estas corazas se r H encuentran a la misma distancia del eje de giro). Llamando H a la altura del cilindro, su momento de inercia será: b I = ∫ r2 dm = ∫ r 2 ρ 2π rH dr = ρ 2π H a ⎛ ⎞ M 1 4 4 = ⎜ ⎟ 2π H (b − a ) = 2 2 π b − a H 4 ) ⎠ ⎝ ( 1 4 b − a4 ) = ( 4 1 M (b2 + a2 ) 2 d) En este caso nuestro objeto se puede descomponer en un cilindro y dos esferas casi completas. El momento de inercia de dicho objeto será por lo tanto la suma de los momentos de inercia de las tres piezas: Iz = Iz,cilindro + 2I z,esfera . Física Tema Página 3 Para el cilindro podemos calcular su momento de inercia de forma similar a como hicimos en el apartado anterior. Utilizando la fórmula anterior y haciendo la sustitución b = R y a = 0, tenemos que: Icilindro = 1 1 1 M cilindroR 2 = (ρπ R 2 L) R 2 = ρπ R 4 L . 2 2 2 Z Para el cálculo del momento de inercia de las dos piezas esféricas dividámoslas en rodajas de espesor dz y radio r como se muestra en la figura. La relación entre r y z es: r2 + z2 = (2R) 2 ⇒ r2 = 4R 2 − z 2 r z 2R La cantidad de masa contenida en una de las rodajas será: R 2 dm = ρπ r dz Y la contribución de cada rodaja, considerada como un disco, al momento de inercia respecto del eje de simetría será: dIz,rodaja = 2 1 1 1 dm r 2 = ρπ r4 dz = ρπ (4R 2 − z 2 ) dz 2 2 2 El momento de inercia de la pieza esférica será: Iz = ∫ dI z,rodaja z máx . 2R z mín. − 3R 1 2 1 = ⌠ ⎮ ρπ ( 4R 2 − z2 ) dz = ⌠ ⎮ ρπ (16R 4 − 8R 2 z 2 + z 4 ) dz = ⌡ 2 ⌡ 2 2R 1 ⎛ 8 1 ⎞ ⎤ = ρπ 16R 4 z − R 2 z3 + z5 ⎥ ⎝ 2 3 5 ⎠ ⎦ − = 3R 1 ⎛ 256 49 ⎞ ρπ R 5 + 3 ⎝ 15 ⎠ 2 5 La masa de esta pieza esférica será: z máx . M esfera = ∫ dmrodaja = ∫ ρπ (4R 2 − z 2 ) dz = z mín. 2R 1 ⎞ ⎤ ⎛ = ρπ 4R 2 z − z3 ⎥ ⎝ 3 ⎠ ⎦ − = ρπ R 3 3R ⎛ 16 ⎞ +3 3 ⎝ 3 ⎠ El momento de inercia de todo el objeto será: ⎛ 256 49 ⎞ ⎫ 4 ⎧ L Iz = Iz,cilindro + 2I z,esfera = ρπ R ⎨ + ⎝ + 3⎠ R ⎬ 15 5 ⎩ 2 ⎭ Física Tema Página 4 Que se puede escribir en función de la masa del objeto sustituyendo la densidad en función de ésta: ⎧ ⎛ 32 ⎞ ⎫ M = M cilindro + 2M esfera = ρπ R 2 ⎨ L + + 6 3 R ⎬ ⎝ 3 ⎠ ⎭ ⎩ ⇒ ρ= M ⎧ ⎛ 32 ⎞ ⎫ π R 2 ⎨ L + + 6 3 R ⎬ ⎝ 3 ⎠ ⎭ ⎩ ⎧ L ⎛ 256 49 ⎞ ⎫ ⎪⎪ 2 + ⎝ 15 + 5 3⎠ R ⎪⎪ 2 Iz = ⎨ ⎬ MR 32 ⎛ ⎞ ⎪ L + + 6 3 R ⎪ ⎝ 3 ⎠ ⎪⎩ ⎪⎭ ⇒ Si hubiésemos considerado desde el principio esferas completas el resultado no hubiese diferido mucho del anterior (como se puede comprobar dando valores para L y R) y vendría dado por: ⎧ L 512 ⎫ ⎪ 2 + 15 R ⎪ 2 Iz = ⎨ ⎬ MR 64 ⎪ L + R ⎪ ⎩ 3 ⎭ Calcular el momento de inercia de una esfera hueca respecto a un eje que pasa por su centro. Solución: I.T.I. 01, 04, I.T.I. 04 Coloquemos nuestro origen de coordenadas en el centro de la esfera. Todos los puntos de la esfera se encuentran a la misma distancia de dicho centro, por lo tanto si calculamos su momento de inercia polar respecto de dicho punto nos dará: IO = MR 2 . Por simetría el momento de inercia respecto de los tres ejes coordenados X, Y y Z tiene el mismo valor Ix = I y = Iz , y además se verifica que: Ix + Iy + Iz = 2IO ⇒ I x = Iy = I z = 2 MR 2 3 Determínese el momento de inercia de un cono circular recto respecto a: a) su eje longitudinal, b) un eje que pasa por el vértice del cono y es perpendicular a su eje longitudinal, c) un eje que pasa por el centro de gravedad del cono y es perpendicular a su eje longitudinal. Solución: I.T.I. 01, 04, I.T.T. 04 Orientemos el eje X de forma que sea el eje longitudinal del cono, como se muestra en la figura. Dividamos al cono en rodajas circulares de espesor dx y radio r. La relación entre r y x es: Física Tema y z x H R Página 5 x r R = x H ⇒ ⎛ R ⎞ r = ⎝ ⎠ x H La cantidad de masa contenida en una de las rodajas será: 2 ⎛ R ⎞ dm = ρπ r 2 dx = ρπ ⎝ ⎠ x 2 dx H a) El momento de inercia del cono será igual a la suma de los momentos de inercia de todas las rodajas: H 4 1 ⌠ 1 ⎛ R ⎞ 4 1 2 4 Ix = ∫ dIx = ⌠ ⎮ dm r = ⎮ ρπ ⎝ ⎠ x dx = ρπ R H ⌡2 H 10 ⌡2 0 Para escribir el resultado en función de la masa del cono: H 2 ⌠ ⎛ R ⎞ 1 M = ∫ dm = ⎮ ρπ ⎝ ⎠ x 2 dx = ρπ R 2 H H 3 ⌡ ⇒ ρ= 3M π R 2H 0 Sustituyendo en la expresión del momento de inercia: Ix = 3 MR2 10 b) Calculemos ahora el momento de inercia respecto del eje Y. Consideremos primeramente unos ejes Y ʹ′ y Zʹ′ contenidos en el plano de cada rodaja y paralelos respectivamente a los ejes Y y Z. Para cada rodaja tendremos: por simetría: dIy ʹ′ = dIz ʹ′ ⎫ ⎪ ⎬ teorema de los ejes perp.: dIx = dI y ʹ′ + dIz ʹ′ ⎪⎭ ⇒ dIy ʹ′ = dIz ʹ′ = 1 1 dI x = dmr 2 2 4 Utilizando el teorema de Steiner podemos calcular el momento de inercia de cada rodaja respecto del eje Y: 4 2 1 ⎛ R ⎞ ⎛ R ⎞ ⎛ R ⎞ dIy = dI y ʹ′ + dm x = ρπ ⎝ ⎠ x 4 dx + ρπ ⎝ ⎠ x 4 dx = ρπ ⎝ ⎠ 4 H H H 2 2 ⎡ 1 ⎛ R ⎞ 2 ⎤ 4 ⎢ ⎝ ⎠ + 1⎥ x dx ⎢⎣ 4 H ⎥⎦ El momento de inercia del cono respecto del eje Y será: Física Tema Página 6 H ⌠ ⎛ R ⎞ 2 ⎡ 1 ⎛ R ⎞ 2 ⎤ 4 Iy = ∫ dIy = ⎮ ρπ + 1⎥ x dx = ⎢ ⎥⎦ ⌡ ⎝ H ⎠ ⎢⎣ 4 ⎝ H ⎠ 0 = 1 ⎡ 1 ⎤ ρπ R 2 ⎢ R 2 + H 2 ⎥ H = 5 ⎣ 4 ⎦ 3 ⎡ 1 2 ⎤ M ⎢ R + H 2 ⎥ 5 ⎣ 4 ⎦ c) Consideremos un eje YC.M. paralelo al eje Y y que pase por el C.M. del cono. Sabiendo que el C.M. del cono se encuentra a una distancia de su vértice de tres cuartos de su altura y aplicando el teorema de Steiner: ⎛ 3 ⎞ Iy = I yC . M . + M ⎝ H⎠ 4 2 ⇒ IyC . M . = 3 1 ⎡ ⎤ M ⎢ R 2 + H 2 ⎥ 20 ⎣ 4 ⎦ Dada la semiesfera x2 + y2 + z2 = R2, z ≥ 0. Calcular sus momentos de inercia Ix, Iy e Iz Solución: I.T.I. 01, 04, I.T.T. 04 Para una esfera completa tenemos que el momento de inercia respecto de cualquier eje que pase por su centro es: Ix,esfera = Iy,esfera = Iz,esfera = z R 2 M R2 5 esfera y x Cada semiesfera contribuye de igual forma al momento de inercia de la esfera completa, por lo tanto: Ix,semiesfera = I y,semiesfera = I z,semiesfera = 1 ⎛ 2 ⎞ 2 ⎛ 1 ⎞ M esfera R 2 ⎠ = ⎝ M esfera ⎠ R 2 = ⎝ 2 5 5 2 2 M R2 5 semiesfera Es decir la expresión matemática resulta ser la misma, dos quintos de la masa por el radio al cuadrado, pero teniendo en cuenta que ahora la masa de nuestra pieza es la de una semiesfera, no la de la esfera completa. Física Tema Página 7 Calcular el centro de masas de medio paraboloide (y ≥ 0) de revolución alrededor del eje X, cuyo radio en la base es R, la altura es H, y su vértice se encuentra en el origen de coordenadas. Calcular sus momentos de inercia Ix, Iy e Iz. Si Y’ es un eje paralelo al eje Y pero que pasa por la base del paraboloide, calcular Iy’. Solución: I.T.I. 04, I.T.T. 01, 04 Sea el semiparaboloide de la figura orientado a lo largo del eje X, de altura H y radio R. Dado que el plano XY es un plano de simetría que divide al semiparaboloide en dos mitades simétricas, el C.M. se encontrará en dicho plano, con lo cual la coordenada z del C.M. será nula: zC.M . = 0 y z R x H Para el cálculo de la coordenada x del C.M. dividimos al semiparaboloide en rodajas en forma de semidiscos de radio r y espesor dx. La ecuación del paraboloide nos da la relación entre la coordenada x y el radio r de los semidiscos: y z r x x 2 x = k r ⎫ ⎪ ⎬ 2 ⎪ H = k R ⎭ 1 ⇒ H k= 2 R ⇒ ⎛ R 2 r = ⎜ ⎝ H ⎞ 2 x⎟ ⎠ El volumen de cada uno de los semidiscos será: 1 1 ⎛ R 2 ⎞ dV = π r2 dx = π ⎜ x⎟ dx 2 2 ⎝ H ⎠ El volumen total del semiparaboloide será: H ⌠ 1 ⎛ R 2 ⎞ 1 V = ∫ dV = ⎮ π ⎜ x ⎟ dx = π R 2 H 4 ⌡ 2 ⎝ H ⎠ 0 La coordenada x del C.M. será: a ⌠ 1 ⎛ R 2 ⎞ 2 1 2 2 ∫ x dV = ⎮⌡ 2 π ⎜⎝ H ⎟⎠ x dx = 6 π R H € 0 ⇒ Física xC .M . = ∫ x dV = ∫ dV 2 H 3 Tema Página 8 Para la coordenada y del C.M. vamos a utilizar los mismos diferenciales de volumen del cálculo anterior, a pesar de que todos sus puntos no tengan la misma coordenada y. 4r Sabiendo que el C.M. de un semicírculo de radio r se encuentra a una distancia del 3π diámetro, vamos a tomar esta posición como la representativa de cada una de las rodajas utilizadas en el apartado anterior. H ⌠ ⎛ 4r ⎞ ⌠ ⎛ 4r ⎞ 1 ∫ ysemidisco dV = ⎮⌡ ⎝ 3π ⎠ dV = ⎮⌡ ⎝ 3π ⎠ 2 π r 2dx = 0 H H 3 ⌠ 2 ⎛ R 2 ⎞ 2 2 3 4 3 =⌠ r dx = ⎮ ⎜ x ⎟ dx = RH ⎮ ⎮ 3 ⎝ H ⎠ ⌡3 15 ⌡ 0 0 ⇒ y C.M . = ∫y semidisco ∫ dV dV = 16R 15π Vamos a calcular ahora los momentos de inercia del semiparaboloide. Para simplificar los cálculos vamos a realizarlos para el paraboloide completo y después dividiremos por dos. Si dividimos el paraboloide en rodajas de espesor dx (igual que hacíamos en los cálculos anteriores pero ahora las rodajas son círculos completos) la cantidad de masa contenida en una de las rodajas será: ⎛ R 2 ⎞ dm = ρπ r dx = ρπ ⎜ x ⎟ dx ⎝ H ⎠ 2 su momento de inercia respecto del eje X será la suma de los momentos de inercia de todas las rodajas: € H ⌠ 1 ⎛ R 4 ⎞ 2 1 1 2 4 Ix, parab . = ∫ dI x = ⌠ ⎮ dmr = ⎮ ρπ ⎜ 2 ⎟ x dx = ρπ R H ⌡2 2 ⎝ H ⎠ 6 ⌡ 0 Para escribir el resultado en función de la masa del paraboloide: H ⌠ ⎛ R 2 ⎞ 1 M parab. = ∫ dm = ⎮ ρπ ⎜ x⎟ dx = ρπ R 2 H 2 ⌡ ⎝ H ⎠ ⇒ ρ= 2M π R 2H 0 Sustituyendo en la expresión del momento de inercia: Ix = 1 M R2 3 parab. Para el cálculo de Iy , Iz tenemos que por simetría Iy = I z . Calculemos ahora el momento de inercia respecto del eje Y. Consideremos primeramente unos ejes Y * y Z * Física Tema Página 9 contenidos en el plano de cada rodaja y paralelos respectivamente a los ejes Y y Z. Para cada rodaja tendremos: por simetría: dIy * = dIz* ⎫ ⎪ ⎬ teorema de los ejes perp.: dIx = dI y* + dIz* ⎪⎭ ⇒ dI y* = dI z* = 1 1 dIx = dm r2 2 4 Utilizando el teorema de Steiner podemos calcular el momento de inercia de cada rodaja respecto del eje Y: ⎛ R 2 ⎞ 3 1 ⎛ R 4 ⎞ 2 dIy = dI y* + dm x = ρπ ⎜ 2 ⎟ x dx + ρπ ⎜ ⎟ x dx 4 ⎝ H ⎠ ⎝ H ⎠ 2 El momento de inercia del paraboloide respecto del eje Y será: H ⌠ ⎡ 1 ⎛ R 4 ⎞ 2 ⎛ R 2 ⎞ 3 ⎤ Iy, parab . = ∫ dI y = ⎮ ⎢ ρπ ⎜ 2 ⎟ x dx + ρπ ⎜ ⎟ x dx ⎥ = ⎝ H ⎠ ⎥⎦ ⌡ ⎢⎣ 4 ⎝ H ⎠ 0 1 1 ⎡ 1 ⎤ ⎡ 1 ⎤ = ⎢ R 2 H + H 3 ⎥ ρπ R 2 = M parab. ⎢ R 2 + H 2 ⎥ 12 4 2 3 ⎣ ⎦ ⎣ ⎦ Para el semiparaboloide los momentos de inercia pedidos serán la mitad, pero como su masa ya es la mitad la expresión será la misma: Ix = Iy = I z = 1 M R2 3 semiparab. 1 ⎡ 1 ⎤ Msemiparab. ⎢ R 2 + H 2 ⎥ 2 ⎣ 3 ⎦ El área por debajo de la curva y = a(x/h)n, con x entre 0 y h, gira alrededor del eje X y genera un sólido de revolución homogéneo de masa m. Exprésese el momento de inercia del sólido respecto al eje X y respecto al eje Y en términos de m, a y n. Solución: I.T.I. 03, I.T.T. 01, 03 Vamos a dividir ese sólido de revolución en rodajas circulares de radio y y espesor dx. La contribución al momento de inercia respecto del eje X de cada una de las rodajas será: 4n ⎞ 1 1 1 1 2 2 2 4 4 ⎛ x dIx = dm y = (ρπ y dx) y = ρπ y dx = ρπ a ⎜ 4 n ⎟ dx 2 2 2 2 ⎝ h ⎠ El momento de inercia respecto del eje X de todo el sólido será: Física Tema Página 10 h 4n ⌠1 ⎞ 1 h 4 ⎛ x Ix = ∫ dIx = ⎮ ρπ a ⎜ 4 n ⎟ dx = ρπ a 4 ⎝ h ⎠ 2 4n + 1 ⌡2 0 Para ponerlo en función de su masa calculamos ésta: h h 2n ⌠ h 2 2 ⎛ x ⎞ 2 m = ∫ dm = ∫ ρπ y dx = ⎮ ρπ a ⎜ 2n ⎟ dx = ρπ a ⎝ h ⎠ 2n + 1 ⌡ 0 ⇒ ρ= (2n + 1) m π a 2h 0 Sustituyendo en la expresión del momento de inercia: 1 ⎛ 2n + 1⎞ 2 ma 2 ⎝ 4n + 1⎠ Ix = Calculemos ahora el momento de inercia respecto del eje Y. Consideremos primeramente unos ejes Y * y Z * contenidos en el plano de cada rodaja y paralelos respectivamente a los ejes Y y Z. Para cada rodaja tendremos: por simetría: dI y* = dI z* ⎫ ⎪ ⎬ teor. de los ejes perp.: dIx = dI y* + dIz* ⎪⎭ dI y* = dI z* = ⇒ = 1 1 dIx = dm y 2 = 2 4 1 x4 n ρπ a 4 4 n dx 4 h Utilizando el teorema de Steiner podemos calcular el momento de inercia de cada rodaja respecto del eje Y: dIy = dI y* + dm x 2 = ⎛ x 2n+ 2 ⎞ 1 x4 n ρπ a 4 4 n dx + ρπ a 2 ⎜ 2n ⎟ dx 4 h ⎝ h ⎠ El momento de inercia del sólido respecto del eje Y será: h ⌠ ⎡ 1 ⎛ x 4 n ⎞ ⎛ x 2n+ 2 ⎞ ⎤ Iy = ∫ dIy = ⎮ ⎢ ρπ a 4 ⎜ 4 n ⎟ dx + ρπ a2 ⎜ 2n ⎟ dx ⎥ = ⎝ h ⎠ ⎝ h ⎠ ⎥⎦ ⌡ ⎢⎣ 4 0 = Física 1 h h3 ρπ a 4 + ρπ a 2 = 4 4n + 1 2n + 3 1 ⎛ 2n + 1⎞ ⎛ 2n + 1⎞ ma 2 + ⎝ mh 2 ⎝ ⎠ ⎠ 4 4n + 1 2n + 3 Tema Página 11