CD-3323.pdf
Anuncio

1
ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
DISEÑO E IMPLEMENTACIÓN DE UN CONTROL NO LINEAL DE
CONVERSORES CONMUTADOS DC-DC, UTILIZANDO TÉCNICAS
DE DESLIZAMIENTO; Y LA VIALIDAD DEL USO DE LA PASIVIDAD
Y LINEALIZACIÓN ENTRADA-SALIDA POR REALIMENTACIÓN
PROYECTO PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN
ELECTRÓNICA Y CONTROL
PABLO ANÍBAL VELARDE RUEDA
pablovelarderueda@gmail.com
DIRECTOR: ING. ÓSCAR CERÓN, MSc
oceron@mailfie.epn.edu.ec
Quito, Noviembre 2010
2
DECLARACIÓN
Yo, Pablo Aníbal Velarde Rueda, declaro bajo juramento que el trabajo aquí descrito es
de mi autoría; que no ha sido previamente presentada para ningún grado o calificación
profesional; y, que he consultado las referencias bibliográficas que se incluyen en este
documento.
A través de la presente declaración cedo mis derechos de propiedad intelectual
correspondientes a este trabajo, a la Escuela Politécnica Nacional, según lo establecido
por la Ley de Propiedad Intelectual, por su Reglamento y por la normatividad institucional
vigente.
______________________
Pablo Aníbal Velarde Rueda
3
CERTIFICACIÓN
Certifico que el presente trabajo fue desarrollado por Pablo Aníbal Velarde Rueda, bajo mi
supervisión.
________________________
Ing. Óscar Cerón, MSc.
DIRECTOR DEL PROYECTO
4
AGRADECIMIENTOS
Agradezco en primer lugar a Dios por permitirme culminar esta etapa de mi vida.
Adicionalmente, a mi familia, a mis amigos, a todos quienes han estado presentes
durante este proceso estudiantil.
Quiero hacer un agradecimiento especial a mi director de proyecto, quien me ha
guiado permitiendo la realización y culminación del mismo.
A las autoridades y el personal docente de los Colegios Benalcázar y Andino por
haberme dado la oportunidad de laborar en estas prestigiosas Instituciones.
5
DEDICATORIA
A mi familia: Mi papá (+), quien manifestó que mis logros, serán los suyos. Mi
mamá, por todo su amor, paciencia y dedicación conmigo. A mi hermana y su
pequeña Dianita, Ale y Yoli, quienes son seres en los que siempre he podido
confiar.
CONTENIDO
1.
CAPÍTULO I ....................................................................................................................... 11
6
ANÁLISIS E INTRODUCCIÓN DEL CONTROL NO LINEAL APLICADO A LOS
CONVERSORES DC/DC ............................................................................................................ 11
1.1
INTRODUCCIÓN........................................................................................................ 11
1.2
ANTECEDENTES DEL CONTROL NO LINEAL EN CONVERSORES DC/DC (2) .. 14
1.3
CONVERSORES CONMUTADOS DC/DC [1] ........................................................... 14
1.4
TOPOLOGÍAS BÁSICAS [1] ...................................................................................... 17
1.4.1
Conversor Buck (Reductor)................................................................................... 17
1.4.2
Conversor Boost (Elevador) .................................................................................. 18
1.4.3
Conversor Buck&Boost (Reductor – elevador) ...................................................... 18
1.5
ANÁLISIS DE LOS CONVERSORES EN EL ESPACIO DE ESTADOS [1] .............. 27
1.5.1
Modelo promediado en el espacio de estado .......................................................... 28
1.6
SIMULACIÓN DEL CONVERSOR DE CÚK ............................................................. 32
1.7
MODELO PERTURBADO DEL SISTEMA [3] ........................................................... 34
1.8
TIPOS DE CONTROL EN LOS CONVERSORES CONMUTADOS
1.9
EFECTOS NO LINEALES EN EL CONVERSOR DC /DC (2) .................................... 38
DC/DC .......... 36
1.9.1
DISEÑO DE UN CONTROLADOR PI, PARA UN MODELO LINEALIZADO DE
UN CONVERSOR DE BOOST (5) ...................................................................................... 40
2
CAPÍTULO II ...................................................................................................................... 45
ANÁLISIS, DISEÑO E IMPLEMENTACIÓN DEL RECONSTRUCTOR INTEGRAL
APLICADO A CONVERSORES DC/DC. ................................................................................... 45
2.1
3
TÉCNICAS DE SENSADO EN CONVERSORES CONMUTADOS DC/DC [6] 45
2.1.1
RESISTENCIA DE SENSADO SERIE ................................................................ 45
2.1.2
SENSANDO DRAIN-SOURCE .......................................................................... 46
2.1.3
FILTRO DE SENSADO ........................................................................................... 46
2.1.4
SENSEFETs ......................................................................................................... 47
2.1.5
TRANSFORMADORES DE CORRIENTE .......................................................... 48
2.2
ANÁLISIS TEÓRICO DE LA RECONSTRUCCIÓN INTEGRAL [4]......................... 50
2.3
RECONSTRUCCIÓN INTEGRAL APLICADA A CONVERSORES DC/DC [5] ....... 53
2.4
DISEÑO Y SIMULACIÓN DEL CONVERSOR DE BOOST ..................................... 59
CAPÍTULO III ..................................................................................................................... 64
ANÁLISIS, DISEÑO E IMPLEMENTACIÓN DEL CONTROL EN MODO DE
DESLIZAMIENTO APLICADO A CONVERSORES DC/DC ................................................... 64
3.1
NOCIONES BÁSICAS DEL CONTROL EN MODO DESLIZANTE [2]..................... 64
3.2
DESCRIPCIÓN VECTORIAL DEL CONTROL EN MODO DESLIZANTE [7] ......... 66
7
3.3
EXISTENCIA DEL MODO DESLIZANTE ................................................................. 67
3.4
REGIONES DE DESLIZAMIENTO ............................................................................ 69
3.5
ESTUDIO DE ESTABILIDAD .................................................................................... 70
3.6
RECHAZO A PERTURBACIONES ............................................................................ 71
3.7
(8)
ESTRATEGIA PARA LA APLICACIÓN DEL CONTROL EN MODO DESLIZANTE
72
5.
Determinar la dinámica ideal de deslizamiento reemplazando ueq en la dinámica del sistema.
73
6.
Obtener los puntos de equilibrio de la dinámica ideal. ....................................................... 73
7.
Analizar la estabilidad de los puntos de equilibrio. ............................................................ 73
8. Realizar el estudio de la robustez del sistema frente a posibles perturbaciones en la señal de
entrada y en la carga................................................................................................................. 73
9.
Simular el sistema en lazo cerrado. ................................................................................... 73
10.
Implementar experimentalmente el control. .................................................................. 73
3.8
CONTROL EN MODO DESLIZANTE APLICADO AL CONVERSOR BOOST [8] . 73
3.8.1
DEFINICIÓN DE SUPERFICIE DE DESLIZAMIENTO ..................................... 74
3.8.2
CONDICIÓN DE TRANSVERSALIDAD ............................................................ 75
3.8.3
CÁLCULO DEL CONTROL EQUIVALENTE .................................................... 75
3.8.4
REGIONES DE DESLIZAMIENTO .................................................................... 75
3.8.5
DINÁMICA IDEAL DE DESLIZAMIENTO ....................................................... 76
3.8.6
PUNTO DE EQUILIBRIO ................................................................................... 76
3.8.7
ANÁLISIS DE ESTABILIDAD DEL PUNTO DE EQUILIBRIO......................... 77
3.8.8
SIMULACIONES DEL CONTROL EN MODO DE DESLIZAMIENTO EN EL
CONVERSOR DE BOOST .................................................................................................. 78
3.9
APLICACIÓN DEL MODO DESLIZANTE A LOS RECONSTRUCTORES
INTEGRALES [7] ................................................................................................................... 80
3.9.1
APLICACIÓN DE LOS RECONSTRUCTORES INTEGRALES EN EL
CONTROL EN MODO DESLIZANTE PARA EL CONVERSOR DE BOOST ................... 80
3.9.2
4
PROTOTIPO DE LABORATORIO ...................................................................... 84
CAPÍTULO IV .................................................................................................................... 90
ANÁLISIS DE LA VIALIDAD DEL USO DEL CONTROL BASADO EN PASIVIDAD……89
4.1
INTRODUCCIÓN........................................................................................................ 90
4.2
PASIVIDAD [9] ........................................................................................................... 90
8
5
4.3
CONTROL BASADO EN PASIVIDAD ...................................................................... 97
4.4
APLICACIÓN DEL CONTROL POR PASIVIDAD AL CONVERSOR BOOST [4] ... 98
CAPÍTULO V .....................................................................................................................107
ANÁLISIS DE LA VIALIDAD DEL CONTROL POR LINEALIZACIÓN ENTRADASALIDA POR REALIMENTACIÓN…………………………………………………………106
5.1
INTRODUCCIÓN.......................................................................................................107
5.2
LINEALIZACIÓN ENTRADA-SALIDA [1] ..............................................................107
5.3
APLICACIÓN DE LA LINEALIZACIÓN ENTRADA-SALIDA AL CONVERSOR
BOOST [2] .............................................................................................................................110
5.4
APLICACIÓN DE LA LIENALIZACIÓN ENTRADA-SALIDA AL CONVERSOR DE
BOOST CUANDO LA SALIDA ES LA CORRIENTE EN EL INDUCTOR ..........................114
6
CAPÍTULO VI ...................................................................................................................118
PRUEBAS Y ANÁLISIS DE RESULTADOS ............................................................................118
7
CAPÍTULO VII ..................................................................................................................124
CONCLUSIONES Y RECOMENDACIONES ...........................................................................124
7.1
CONCLUSIONES.......................................................................................................124
7.2
RECOMENDACIONES ..............................................................................................125
REFERENCIAS BIBLIOGRÁFICAS .........................................................................................127
RESUMEN
9
El control de conversores de potencia conmutados DC/DC, es un área de
investigación muy activa, tanto en electrónica de potencia como en teoría de
control automático. Debido esencialmente, a la actual demanda de este tipo de
sistemas en diferentes aplicaciones industriales, donde se requiere convertir un
voltaje fijo de una fuente de DC en un voltaje variable de suministro de DC. Los
convertidores de DC se usan mucho para el control de motores de tracción de
automóviles eléctricos, tranvías, grúas
marinas, montacargas y elevadores de
mina. Se los puede usar en el freno regenerativo de motores de DC para regresar
la energía a la fuente, esta propiedad permite ahorros de energía en los sistemas
de transporte que tienen frenados frecuentes. Los conversores de DC se usan en
los reguladores de voltaje de DC, también se usan en conjunto con un inductor
para generar una corriente de DC, en especial para el inversor de fuente de
corriente. Estas aplicaciones exigen rapidez de respuesta, estabilidad frente a
perturbaciones y alta eficiencia.
Estas características son difíciles de alcanzar, debido principalmente a la
naturaleza no lineal que tiene este tipo de sistemas. Estas propiedades han
motivado el desarrollo de este trabajo, en la búsqueda de controladores que
mejoren las prestaciones dinámicas de este tipo de convertidores. Por ello, el
desarrollo de este trabajo es orientado al análisis, diseño e implementación de
controles analógicos aplicados a los convertidores de potencia DC/DC. Para
lograrlo se aplican técnicas de control no lineal, pudiendo considerar la naturaleza
bilineal de dicho tipo de plantas y garantizar estabilidad en gran señal. En
particular, se desarrolla: El control en modo deslizamiento, el estudio de la
viabilidad de la linealización entrada-salida por realimentación y el control basado
en pasividad.
Estas técnicas de control, al igual que las lineales, requieren que una o varias
variables de estado se realimenten para poder implementar la ley de control, para
conseguirlo se omite la necesidad de sensar las variables y se aplicando
la
10
técnica de
una reconstrucción integral. Este reconstructor integral permite
observar una variable no medible, a partir de la integral de una cierta relación
entre la entrada y la salida. Esta observación o reconstrucción no lineal sustituye
la variable no medible en los lazos de control.
PRESENTACIÓN
Para llevar a cabo este proyecto de titulación se contemplan las siguientes etapas:
11
a) Obtención de modelos matemáticos de los conversores de potencia de
DC/DC, que se emplearán para el análisis y diseño de los lazos de control.
b) Análisis de la técnica de reconstrucción integral, como precedente teórico,
para la estimación de las variables en diferentes topologías.
c) Estudio del control en modo deslizamiento, con el propósito de abordar
diferentes superficies de deslizamiento, aplicadas a los convertidores
DC/DC.
d) Estudio del control basado en la pasividad.
e) Estudio de
la viabilidad de utilizar la linealización entrada-salida, como
alternativa para controlar los conversores conmutados DC/DC.
f) Validación del control por deslizamientos, tanto a nivel de simulación, como
mediante
la
realización
controlador-reconstructor
de
diversas
integral,
implementaciones
obteniéndose
una
físicas
del
verificación
experimental, donde la presencia de ruidos o perturbaciones no afecten
sustancialmente las formas de onda.
1. CAPÍTULO I
ANÁLISIS E INTRODUCCIÓN DEL CONTROL NO LINEAL
APLICADO A LOS CONVERSORES DC/DC
1.1 INTRODUCCIÓN
En muchas aplicaciones industriales se requiere convertir un voltaje fijo de una
fuente de DC, en un voltaje variable de suministro de DC. Un conversor DC/DC o
12
simplemente conversor de DC, convierte en forma directa, una magnitud fija a otra
DC variable. Un conversor de DC puede ser considerado el equivalente, en DC,
de un transformador de AC, con una relación de vueltas que varía en forma
continua. Al igual que un transformador, un conversor de DC se puede usar para
subir o bajar el voltaje de una fuente. Los conversores de DC se usan para el
control de motores de tracción de automóviles eléctricos. Adicionalmente, tienen
aplicación en el frenado regenerativo de motores de DC así como para regresar la
energía a la fuente.
Los conversores de DC se usan en los reguladores de
voltaje de DC y fuentes de corriente. [1]
El esquema general del conversor
DC/DC se presenta en la figura 1.1, está
formado por elementos de conmutación y elementos que almacenan energía,
como los inductores y los capacitores.
CONVERSOR
FUENTE DE
ENTRADA
Figura 1.1: Esquema de un conversor DC
Los conversores están entre una fuente primaria y una carga, generalmente
resistiva. Como fuentes de entrada, se encuentran las baterías electrolíticas, las
pilas de combustible, los paneles solares, los generadores eólicos y la red
eléctrica rectificada.
Las cargas serán de voltaje continuo, citando como
aplicaciones desde la alimentación de tarjetas microprocesadoras y DSPs
(Procesador Digital de Señal), que se encuentran en equipos informáticos y de
telecomunicaciones, hasta buses de alimentación en sistemas embarcados
(satélites de comunicación, automóviles, aviones). Para mejorar los requerimientos
13
de la respuesta, en la mayoría de los casos, es necesario implementar un lazo de
control, el cual actúa directamente sobre el elemento conmutador, modificando su
tiempo de conducción; logrando así el transitorio y consiguiendo una mayor
estabilidad frente a perturbaciones.
El análisis y diseño de este lazo de control puede llegar a presentar dificultades,
debido a la naturaleza no lineal de los conversores DC/DC y a su estructura
variable. Una alternativa es aproximar esta dinámica no lineal, por un modelo
lineal que permita diseñar reguladores, con técnicas de control lineal ampliamente
conocidas. Cabe notar que el sistema realimentado, solo será válido, para
perturbaciones que mantengan las variables del regulador en un rango
determinado.
Con la finalidad de superar esta limitación, a partir de los años 80’s, surgen
nuevas propuestas que diseñan el control a partir de modelos no lineales. Por una
parte en el contexto de reguladores PWM (Modulación por ancho de pulso)
operando a frecuencia fija,
es posible aplicar técnicas de linealización por
realimentación, que pretenden conseguir una dinámica lineal del conjunto
controlador-planta, a partir del modelo no lineal promediado del conversor.
También, sobre modelos no lineales promediados, existen técnicas basadas en el
concepto de pasividad, como resultado se obtiene una dinámica suficientemente
amortiguada y por tanto estable, la estabilidad se consigue independientemente de
la amplitud de las perturbaciones.
Por otra parte, otra técnica a considerar, es la del control de estructura variable,
como es el control en modo de deslizamiento. Su aplicación conlleva un sistema
con frecuencia de conmutación variable.
El uso de técnicas no lineales, en el ámbito de la electrónica de potencia es aún
marginal, por lo que en un análisis de prestaciones dinámicas de este tipo de
controles, que permita comparar con los que se utilizan mayoritariamente, tiene un
interés considerable.
14
En este proyecto, se revisan las técnicas de control no lineal, particularmente el
control en modo de deslizamiento, así como la vialidad del uso del control basado
en la pasividad y la linealización por realimentación entrada-salida.
1.2 ANTECEDENTES
DEL
CONTROL
NO
LINEAL
EN
CONVERSORES DC/DC (2)
En el ámbito de los conversores de DC, la estrategia de control en modo de
deslizamiento, ha sido utilizada debido a las ventajas inherentes que ofrece, tales
como: robustez y respuesta dinámica rápida.
Esta técnica se ha aplicado
proponiendo superficies de forma lineal, por ejemplo, corriente en el inductor
constante o una combinación lineal de la corriente en el inductor y voltaje de
salida.
Estas superficies, presentan la particularidad de que son fáciles de
implementar y de análisis teórico sencillo. Sin embargo, dicha técnica está abierta
a la investigación, en cuanto a la incursión de superficies no lineales [2].
Los problemas más importantes para la implementación del control, en modo
deslizamiento, son la adquisición de las variables de estado y la operación del
control a frecuencia de conmutación elevada. Por ejemplo, en algunas superficies
planteadas se requiere la medida de la corriente. Dicha adquisición perjudica la
eficiencia, debido al procedimiento de sensado que se utiliza.
Una posible
solución se plantea donde se regenera la corriente, haciendo uso de
reconstructores integrales. Este método se analiza en los capítulos posteriores y
se verifica experimentalmente su uso, en el control de conversores de potencia.
1.3 CONVERSORES CONMUTADOS DC/DC [1]
15
La descripción de los conversores DC/DC se realiza a partir de la interconexión de
los elementos de energía, para cada una de las posiciones de los conmutadores.
Por ejemplo, para un convertidor de un solo conmutador, el comportamiento
dinámico para la configuración ON (u=1), viene dado por [3]:
, para (1-1)
, para (1-2)
Para la configuración OFF (u=0), puede escribirse de la forma:
Donde:
es el vector de las n variables de estado
y son matrices constantes n x n
y son vectores n x 1.
La salida única Vo se puede expresar en términos de las variables de estado, de la
forma:
, para 0 , para (1-3)
(1-4)
Donde:
y son vectores transpuestos 1 x n.
Los conmutadores pasan de ON a OFF y de nuevo a ON en un tiempo Ts (período
de conmutación). Se define como relación de trabajo δ, a la relación entre el
tiempo que está en posición ON y el período Ts, es decir:
16
!
(1-5)
La figura 1.2 muestra la relación entre la señal de control y el tiempo de
conducción ON y de bloqueo OFF.
Figura 1.2: Señal de control con tiempo ON y OFF
El nivel de la señal de salida dependerá directamente de la relación de trabajo, por
lo tanto, a fin de mantener constante el nivel de dicha señal, el valor de la relación
de trabajo variará según las condiciones instantáneas de potencia, requeridas por
la carga.
EJEMPLO 1.1: Conversor conmutado básico
Si se supone que el interruptor de la figura 1.3 es ideal, la salida es igual a la
entrada cuando el interruptor está cerrado y es cero cuando el interruptor está
abierto.
Vg
u
R
+
Vo
-
Vg
Figura 1.3: Conversor básico DC conmutado
R
17
La apertura o cierre periódico producen la señal de la figura 1.4. La componente
continua es:
" ! #
$%
" & %
& . & .
!
!
!
(1-6)
La componente continua de la salida de voltaje se controla ajustando la relación
de trabajo ( , que es la fracción de período en el que el interruptor está cerrado.
Figura 1.4: Voltaje de salida Vo(t)
1.4
TOPOLOGÍAS BÁSICAS [1]
Las topologías básicas de los conversores DC/DC son: el buck (reductor), boost
(elevador) y el buck – boost (reductor – elevador). Estos tres reguladores se
caracterizan por tener un solo transistor (interruptor controlado) y tienen
conversión en una etapa. La potencia de salida está en el orden de las decenas de
vatios.
1.4.1
Conversor Buck (Reductor)
En la figura 1.5 se muestra un filtro pasa – bajos, con una bobina y un
condensador (L – C), añadido al conversor básico. El diodo proporciona un camino
18
a la corriente cuando el interruptor está abierto, y se polariza inversamente cuando
el interruptor está cerrado. El voltaje de salida Vo es menor al voltaje de entrada.
El conversor buck es un conversor reductor, en el sentido de que su voltaje de
salida nunca puede ser mayor que el de entrada.
R
Figura 1.5: Conversor reductor (Buck)
1.4.2
Conversor Boost (Elevador)
En la figura 1.6 se indica el conversor Boost. Cuando el conmutador está en la
posición (1)
el diodo se polariza inversamente, mientras que cuando el
conmutador está en la posición (2), el diodo se polariza en forma directa. El voltaje
de salida Vo es siempre mayor al voltaje de entrada, de ahí que se conoce como
un conversor elevador.
R
Figura 1.6: Conversor Elevador
1.4.3
Conversor Buck&Boost (Reductor – elevador)
19
El conversor buck&boost es un conversor utilizado para la inversión de la
polaridad del voltaje de salida respecto a la entrada. El voltaje de salida puede ser
tanto elevado o reducido, dependiendo del ciclo de trabajo. La topología de este
convertidor se muestra en la figura 1.7:
R
Figura 1. 7: Conversor reductor/elevador (Buck&Boost)
Los conversores DC/DC analizados anteriormente, se caracterizan por tener una
conexión eléctrica directa entre la entrada y la salida, además poseen un inductor
y un condensador. Las matrices de transición de las topologías básicas se
resumen en la tabla siguiente:
Tabla 1.1: Matrices de transición de los conversores DC/DC
A1
BUCK
BOOST
BUCK &
BOOST
)
0
1
0
/
0
0
/
0
1
,.
1
*
-
*
0
11
*
-
0
11
*
-
)
)
)
0
1
0
1
0
1
A2
B1
B2
X
1
,.
1
*
-
0
/,1
0
0
2 3
0
2 3
*
1
,.
1
*
-
*
1
,.
1
*
-
*
0
/,1
0
0
/,1
0
Existe otra gran variedad de conversores
0
/,1
0
0
2 3
0
Relación
salida-entrada
(0
2 3
2 3
*
0
1*(
0
1*(
conmutados DC/DC, por ejemplo,
20
los que utilizan un transformador (aislamiento galvánico) para aislar la entrada de
la salida, como es el caso del Flyback, Forward, Push-Pull, medio puente y puente
completo. También, están aquellos que tienen dos inductores como el Cúk. De
manera análoga a los conversores DC/DC básicos, en este tipo de convertidores,
se debe analizar el circuito para cada una de las posiciones de sus conmutadores
y a partir de esto obtener un modelo que los describa. [3]
Por otro lado, los conversores conmutados DC/DC, también se pueden clasificar
acorde a su modo de funcionamiento, dependiendo de la continuidad o no de la
corriente que circula por el inductor. De esta manera cuando la corriente sea
continua, durante todo el periodo de conmutación, el convertidor trabajará en
modo continuo y en modo discontinuo, si durante algún instante la corriente en el
inductor vale cero. El siguiente ejemplo ilustra el funcionamiento del conversor
elevador (boost) en cada uno de estos modos.
EJEMPLO 1.2: Análisis y diseño del convertidor boost
Considerando el conversor Boost, donde su voltaje y corriente de salida
promedios son Vo e Io, respectivamente y la corriente media en el inductor es IL.
R
Figura 1.8: Conversor Boost (Elevador)
El conversor tiene dos estados de funcionamiento, como se observa en las figuras
21
1.9 y 1.10, de acuerdo a la posición del conmutador: En el estado I, conmutador en
la posición ON, el inductor L se carga con la tensión Vg y en el estado II, el
conmutador en OFF, el inductor se carga con la tensión Vg - Vo.
ESTADO I (ON):
Figura 1.9: Conversor Boost en estado ON
ESTADO II (OFF):
Figura 1.10: Conversor Boost en estado OFF
El voltaje medio en el inductor es:
" 4 %
"
!
!
& %
" 5& * 6%
!
!
(1-7)
Si el voltaje medio en el inductor es igual cero, se obtiene:
" 4 %
& ! * 5 * & 6# * $! (1-8)
& * # * $ (1-9)
!
Resolviendo y factorando:
22
Despejando el voltaje de salida, Vo:
&
7
(1-10)
Suponiendo que la corriente en el inductor aumenta en forma lineal, de I1 hasta I2
en el tiempo δTs, como se indica en la figura 1.11, se tiene que:
Vo(t)
IL(t)
I2
Vg
I1
Vg - Vo
0
δTs
Ts
Ts+δTs
2Ts
t
Figura 1.11: Corriente en el inductor
4 & 4
%8
%
4
9 79
4
∆9
(1-11)
Es decir,
4
∆9
&
(1-12)
La corriente por el inductor baja de forma lineal desde I2 hasta I1 en el tiempo
(1 - δ)Ts, se tiene:
4 & * 4 %
*4 #7
%8
Es decir:
# * $ *4
9 79
$
*4 #7
∆9
$
∆9
&7
(1-13)
(1-14)
Donde ∆I = I2- I1 se le conoce con el nombre de rizado de corriente en el inductor
L. De las ecuaciones anteriores se obtiene:
∆9 &
4
*
&7
4
# * $!
(1-15)
23
La potencia de entrada en el conversor debe ser igual a la potencia de salida, si se
asume que el conversor no tiene pérdidas:
& . 94 . 9
(1-16)
& . 94 7 9
&
94 (1-17)
9
7
(1-18)
El período de conmutación se puede calcular así:
! ! # * $! 4
∆9
&
*4
∆9
& 7
4 ∆9
& #& 7 $
(1-19)
De donde se deduce el rizado de corriente:
∆9 ∆9 & #& 7 $
&
4
& #& 7 $
;! 4 ;! 4
(1-20)
(1-21)
En el capacitor se observa que cuando el interruptor está cerrado (posición OFF),
éste suministra corriente de carga durante el tiempo δTs. La corriente promedio en
el capacitor (Ic) durante este período de tiempo es Ic=Io y el rizado de voltaje en el
capacitor es:
9
∆ < * =< |
? " ! 9< %
" ! 9 %
Sustituyendo (@A BC 7BD
EF BD
, se obtiene:
(1-22)
24
∆ 9 #& 7 $
;! (1-23)
También:
∆ 9
;! (1-24)
De este análisis, se pueden extraer las siguientes observaciones:
Al variar Io varía el valor promedio IL, y se nota que al variar Io no cambia la
pendiente de la corriente en el inductor, dado que depende de Vg y Vo.
Si en régimen de funcionamiento estacionario se aumenta la carga R, disminuirá la
corriente promedio en el inductor, permaneciendo constante el rizado de la
corriente y el voltaje de salida, con lo cual llegará el momento en que IL = 0
durante algún instante del intervalo Ts. A esta condición, se le conoce como Modo
de Conducción Discontinua (MCD). Otra situación en la que se puede presentar el
MCD, es cuando baja el valor de la inductancia, dado que las pendientes de la
señal de corriente aumenta, o
en aquellos casos en los que el valor de la
frecuencia se disminuye, puesto que aumentan los tiempos en los que la corriente
sube o baja.
En este modo de conducción (MCD) se presentan tres etapas de operación, como
se observa en la figura 1.12, se detalla que en el estado III la corriente en el
inductor es cero.
ESTADO I
ESTADO II
25
ESTADO III
Figura 1. 12: Estados del conversor Boost en MCD
Las formas de onda relevantes para cada uno de los estados se muestran a
continuación, donde el estado I se presenta de 0 < t < δTs, el estado II de
δTs < t < DTs y el estado III de DTs < t <Ts .
Figura 1. 13: Formas de onda del conversor Boost
1.5.
DISEÑO
DEL
CONVERSOR
EN
EL
LÍMITE
CONDUCCIÓN CONTINUA [3]
Vo(t)
IL(t)
Imax
Vg
IL
t
0
Vg - Vo
tON
tOFF
Figura 1.14: Formas de ondas de voltaje y corriente en el límite de conducción continua
DE
26
La figura 1.14 muestra las formas de onda en el límite de conducción continua
para el conversor de Boost. Por definición, en este modo, la corriente del inductor
iL es cero al final del período de oscilación.
El valor medio de la corriente de la inductancia IL está dado por:
94 9Gá &
4
(1-25)
De la ecuación (1-10):
94 # * $
4 ;!
(1-26)
En un conversor elevador (Boost) la corriente en el inductor es la misma corriente
de entrada, por tanto empleando la ecuación (1-18) se obtiene:
9 # * $
4 ;!
(1-27)
Que determina el valor crítico de la inductancia, Lc:
4 9 ;!
I. 9
4 I
;!
# * $
(1-28)
(1-29)
# * $
(1-30)
Y si Vc es el voltaje medio en el capacitor, el rizado de voltaje del mismo es
∆Vc = ∆Vo = 2Vo, donde ∆Vo es el rizado del voltaje de salida, se tiene:
9
;! 9 I
(1-31)
Así el valor crítico del capacitor CC es:
< ;
I
(1-32)
27
Realizando un análisis similar, se pueden encontrar los parámetros de diseño para
los otros conversores básicos. A continuación, se indica la relación salida-entrada
en condiciones de régimen estacionario, el rizado del
voltaje de salida y la
condición mínima que debe cumplir la inductancia, para que exista modo de
conducción continua. [4]
Tabla 1.2: Condiciones de diseño para las topologías básicas
Inductancia mínima
,JKL #1 * ($2NA
Rizado del voltaje de salida
,JKL #1 * ($2NA
∆
(
8,NA
trabajo
se
BUCK
,JKL BOOST
BUCK & BOOST
Cabe
recalcar
que
este
∆
1*(
8,NA
∆
(
8,NA
(#1 * ($ 2NA
centra
en
el
estudio
de
estas
topologías, considerando que trabajan en modo de conducción continua. A
continuación, se estudia el modelado de este tipo de conversores conmutados y
se exponen algunos ejemplos.
1.5 ANÁLISIS DE LOS CONVERSORES EN EL ESPACIO DE
ESTADOS [1]
Se puede plantear una ecuación diferencial lineal o no lineal de n-ésimo orden en
una variable dependiente del tiempo, como “n” ecuaciones diferenciales de primer
orden, con “n” variables dependientes del tiempo, x1 a xn. En el siguiente ejemplo
se tiene una ecuación diferencial de tercer orden:
P′′′ Q P′′ Q P′ Q (1-33)
28
Donde R ′ ecuaciones:
′ ST
SU
, la primera derivada de y.
Si y=x1, se tienen las siguientes
′′ V
′V *Q * Q * QV V
(1-34)
(1-35)
(1-36)
En cada caso, se debe conocer “n” condiciones iníciales para poder llegar a una
solución exacta. Para todo sistema de n-ésimo orden, es necesario y suficiente un
conjunto de n variables independientes para describir por completo ese sistema.
Las variables, x1, x2, …, xn se llaman variables de estado del sistema. Si se
conoce las condiciones iniciales de un sistema lineal en el tiempo to, se puede
determinar los estados del sistema para todo t>to, para determinado conjunto de
fuentes de entrada.
Todas las variables de estado son x con subíndice y todas las fuentes son u con
subíndice.
1.5.1
Modelo promediado en el espacio de estado
El comportamiento real conmutado de los conversores DC/DC, se puede
aproximar por un modelo promediado en el espacio de estados, cuando el periodo
de conmutación es constante y mucho menor que las constantes de tiempo en
cada modo de operación. Dicha promediación, permite encontrar un modelo
continuo que aproxima la evolución de las variables en cada uno de los intervalos
de conmutación.
En el caso de la dinámica descrita por las ecuaciones (1-1) y (1-2), si el interruptor
está abierto (ON) durante el tiempo δTs y cerrado (OFF) durante el tiempo
(1- δ)Ts, la dinámica promediada será:
29
W # * $X W # * $X
(1-37)
De manera más simplificada se puede expresar la dinámica del sistema como:
(1-38)
Siendo las matrices del modelo promediado del sistema:
W # * $X
(1-39)
W # * $X
(1-40)
La señal de salida promediada es:
P W # * $X
(1-41)
Ejemplo: Modelo promediado del conversor de Cúk [1]
El conversor de
Cúk es un conversor conmutado, que funciona abriendo y
cerrando periódicamente un interruptor electrónico y posee cuatro elementos de
almacenamiento: dos inductores L1 y L2, y dos condensadores C1 y C2. Este
convertidor representa las características más deseables de la conexión en
cascada de los conversores buck-boost: la corriente de entrada y salida continua.
La conexión se observa en la figura 1.15. Su voltaje de salida puede ser tanto
reductor como elevador, dependiendo del ciclo de trabajo, además invierte la
polaridad del voltaje de entrada. La bobina de la entrada actúa como un filtro para
la fuente e impide la existencia de un gran contenido de armónicos. (1)
30
Figura 1.15: Conversor de Cúk
Para la configuración ON (u=1):
+ V1
L1
i1
-
C1
L2
i2
-
Vg
C2
V2
R
+
Figura 1. 16: Conversor Cúk modo ON
YZ
Y
YZ
* * ,
Y
Y [
Z Y
\
Y [
Z * Y
0 ,
Para la configuración OFF (u=0):
L1
i1
Vg
C1
+
V1
L2
i2
C2
V2
R
+
Figura 1. 17: Conversor Cúk modo OFF
31
YZ
Y
YZ
* ,
Y
Y [
Z Y
Y[
\
Z * Y
0 * ,
Las ecuaciones de estado en modo ON y OFF pueden escribirse de la forma:
8 8 ]Q^Q 8 , (1-42)
Las matrices A1, A2, B1 y B2 y el vector de estados x son:
0 0
0 0
A1 = 0 1
C1
1
0
C2
0
1
−
L2
0
0
0
0
A2 =
1
C1
0
0
1
−
L2
0
1
−
RC 2
V g
L
1
B1 = B2 = 0
0
0
y
0
−
1
L1
0
0
0
0
1
C2
0
1
−
L2
0
1
−
RC 2
0
i1
i
x= 2
v1
v 2
A partir de las ecuaciones, para obtener el modelo promediado, se puede escribir:
0
0
x& =
1− δ
C1
0
0
0
δ
C1
1
C2
−
1−δ
L1
−
δ
L2
0
0
V g
L
1
1
−
0
L2
x +
0
0
1
−
RC 2
0
0
(1-43)
32
1.6 SIMULACIÓN DEL CONVERSOR DE CÚK
A continuación, en las figuras
figura 1.19 y 1.20 se compara la simulación del arranque
del convertidor en el modelo exacto y el promediado,
promediado, respectivamente.
respectivamente Las
simulaciones se realizar con SIMULlNK, cuando
ndo los parámetros del conversor
convers son:
R = 50 Ω, Vg= 40V,
L1 = 1.5mH, L2 = 1.5mH, C1 = 100 uF, C2 = 100uF, Ts = 4uS. El
ciclo de trabajo considerado
considera es δ = D, siendo D una constante de valor 0.5.
MODELO EXACTO
L1
C1
L2
C2
Vg
Figura 1. 18: Conversor de Cúk (Modelo Exacto)
Figura 1. 19: Corriente en el inductor
R
33
MODELO APROXIMADO
Las matrices empleadas para obtener el modelo a variables de estados son:
a=
x1
x2
x3
x4
x1
0
0 -333.3
x2
0
0 -333.3 -666.7
x3
5000
x4
0
5000
0
0
0 1e+004
0
2000
b=
u1
x1 2.667e+004
x2
0
x3
0
x4
0
c=
x1 x2 x3 x4
y1 1 0 0 0
d=
u1
y1 0
La corriente en el inductor, utilizando el modelo promediado:
34
Step Response
25
20
Amplitude
15
10
5
0
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Time (sec)
Figura 1. 20: Corriente en el inductor
Es de recordar que este modelo, sólo será aplicable cuando el período de
conmutación es constante.
1.7 MODELO PERTURBADO DEL SISTEMA [3]
Para obtener el modelo perturbado de la dinámica promediada, se considera que
las variables de estado x y el ciclo de trabajo δ, varían alrededor de sus
respectivos valores en estado estacionario, es decir:
b#
$
#
$ `a d #
$
%#
$ ca %
(1-44)
(1-45)
Donde ef y gf representan los valores en estado estacionario de las variables de
estado y del ciclo de trabajo respectivamente. Las variables h y Yi representan los
valores de la perturbación.
35
La representación bilineal del modelo promediado, en términos de las señales de
perturbación, se puede escribir de la siguiente forma:
d lm j# * $
dm
b jW # * $cX
b k# * $` # * $%
b%
(1-46)
En estado estacionario, h 0 y los valores de las perturbaciones son cero. Por lo
tanto, el vector de los puntos de equilibrio del sistema está representado por:
` *Wc # * c$ X7 Wc # * c$ X
(1-47)
Cabe notar que la dinámica será lineal para entrada constante (Yi#$ 0) o para
estado constante (h #$ 0), puesto que el término no lineal # * $hYi es nulo
en estos casos. Al producto del estado y del control hYi, se le denomina término
bilineal. Este factor puede ser ignorado, si las perturbaciones son mucho más
pequeñas que los correspondientes valores en estado estacionario. Además, con
el propósito de estudiar la estabilidad del sistema, así como el error en estado
prescinda de los términos hYi:
estacionario, se suele aproximar el modelo promediado por un modelo que
d lm
b jW # * $cX
b k# * $` # * $%
(1-48)
Si se aplica la transformada de Laplace, suponiendo condiciones iniciales
nulas, la ecuación de h#n$ puede ser calculada explícitamente de la siguiente
forma:
d #!$lm
b#!$ jW # * $cX
b#!$ k# * $` # * $%
!
(1-49)
36
d#!$
o!9 * W # * $cXp
b#!$ # * $` # * $%
(1-50)
Hasta el momento, se han expuesto las nociones básicas del tipo de plantas a
emplearse y la forma de modelarlas. A continuación, se plantea los
métodos para controlar los conversores DC/DC y las técnicas empleadas para
mejorar la respuesta de estos sistemas. (5)
1.8 TIPOS DE CONTROL EN LOS CONVERSORES CONMUTADOS
DC/DC
El sistema de control de un conversor DC/DC regula el voltaje de salida y mejora
la respuesta dinámica. Para lograrlo se cambia el ciclo de trabajo y se mantiene la
señal de salida regulada.
El control puede efectuarse de dos formas, en la primera, la señal de control es
de frecuencia fija, por ejemplo, en la figura 1.21 se observa posibles señales de
control, cuando el tON varía y la frecuencia se mantiene constante.
Figura 1. 21: Señal de control manteniendo frecuencia constante
37
Como segunda opción, se tienen sistemas de control a frecuencia variable, donde
el control puede hacerse ya sea con tON fijo o variable. En las figuras 1.22 y 1.23
se muestran los dos casos.
Ts
Ts
U(t)
U(t)
0
U(t)
0
U(t)
Ts
0
U(t)
Ts
0
Ts
0
Figura 1. 22: Señal de control con frecuencia
variable y tON constante
U(t)
Ts
0
Figura 1. 23: Señal de control con frecuencia
constante y tON variable
En los últimos años el diseño de los conversores conmutados DC/DC, se ha
orientado hacia el uso de la modulación por ancho de pulso (PWM), para poder
obtener el valor del voltaje deseado en la salida. El sistema de modulación se
puede dividir en dos etapas, una primera etapa encargada de generar una señal
triangular, y una segunda encargada de generar la onda cuadrada modulada. En
conjunto se debe entregar un valor promedio a la salida durante un periodo. En la
figura 1.24 se muestra el diagrama de operación de la PWM.
38
Figura 1. 24: PWM (Modulación por ancho de pulso)
1.9 EFECTOS NO LINEALES EN EL CONVERSOR DC /DC (2)
A nivel práctico se puede observar que los conversores
DC/DC poseen
dispositivos con diferente naturaleza, clasificados en dos grupos:
a) Componentes de conmutación como el transistor y los diodos
En un conmutador ideal el voltaje (v) en la posición ON es v = O y la corriente (i)
en OFF es i = O. Por tanto idealmente, nunca disipa energía porque el producto
v-i es siempre cero. Los conmutadores activos tales como el transistor se
encienden o se apagan en respuesta a una señal aplicada y los conmutadores
pasivos (diodos) tienen una función característica v - i no lineal. La caída de
voltaje en los interruptores, puede afectar, cuando los voltajes de entrada y salida
del conversor son bajas.
39
b) Componentes reactivos, tales como los inductores y los condensadores
Los inductores y condensadores funcionan como elementos de almacenamiento
de energía en los conversores, y como elementos de filtro para aplanar las
componentes armónicas de corriente.
Estos componentes en general presentan una dinámica no lineal, que sumada a
efectos parásitos o indeseables, dan como resultado un modelo no lineal en los
conversores conmutados.
Dichos efectos son:
Saturación de los inductores;
La característica no lineal intrínseca de los dispositivos semiconductores de
conmutación;
Capacitancias no lineales;
Inductancias no lineales como en el caso de los transformadores y
amplificadores magnéticos.
Este modelo se puede linealizar para facilitar su análisis y el diseño de
controladores. Si bien ha resultado provechoso este método para un gran número
de aplicaciones, la linealización presenta algunos inconvenientes y puede llegar a
responder no satisfactoriamente (llegando incluso a la inestabilidad) cuando:
a) Se ve sometido a perturbaciones que pongan de manifiesto la no linealidad
del conversor conmutado (perturbaciones de gran señal), como en el caso
del transitorio de arranque.
b) Se cambia el punto de operación del conversor, mediante un cambio de la
señal de referencia. Se restringe así la posibilidad de que el controlador
opere con las mismas prestaciones dinámicas, para distintos voltajes de
salida reguladas.
40
Para ilustrar los efectos de la linealización, a continuación se describe el diseño
de un controlador PI, para un modelo linealizado de un conversor de Boost
(elevador).
1.9.1
DISEÑO DE UN CONTROLADOR PI, PARA UN MODELO LINEALIZADO
DE UN CONVERSOR DE BOOST (5)
Si se tiene en cuenta el convertidor elevador, donde la salida es el voltaje del
capacitor x2, se puede calcular los puntos de equilibro a partir de las matrices de
transición presentadas:
q 7c
&
q (1-51)
&
I#7c$
(1-52)
Donde D, x1* y x2* son los valores nominales del ciclo de trabajo, la corriente en el
inductor y el voltaje de salida, respectivamente. Considerando estos valores y la
representación linealizada en el espacio de estados, se obtiene la aproximación
lineal del convertidor boost:
b r7c
*
7c
q
d
b r 4q s %
s
*
*
I
4
(1-53)
h * e y Yi Y * g representan las variables incrementales. La función de
Donde:
transferencia de la señal de la salida respecto a la entrada responde a:
t#!$ u#!$
d #!$
%
*
I#vc$
4
I#7c$V ! w ! w#vc$
I
4
&
!7
(1-54)
Los parámetros del conversor son: R = 10 Ω, Vg= 40V, L = 100 uH, C = 100 uF,
Ts = 4uS, D=0.5. Los puntos de equilibrio son: X1*=4A y X2*=20V.
41
x 10
4
Root Locus
1.5
1
Imaginary Axis
0.5
0
-0.5
-1
-1.5
-1
0
1
2
3
4
Real Axis
5
x 10
4
Figura 1.25: Lugar geométrico de las raíces
Figura1. 26: Diagrama de Nyquist
Ziegler-Nichols,
La forma del gráfico indica que se puede aplicar el método de Ziegler
dado que existe una frecuencia finita,
finita para la cual la parte imaginaria de G(jω) se
hace cero. En este caso, en particular se diseña un controlador PI basándose
basá
en
la respuesta de frecuencia.
42
Sustituyendo n xy en la función de transferencia, se obtiene la expresión que
permite calcular la parte imaginaria y la parte real de z#xy$, esto es:
Ia5t#{|$6 I#7c$`q 57| I4w#7c$ I67| I4 `q
9G5t#{|$6 7|I4`q 57| I4w#7c$ I67|I4`q #7c$
57| I4w#7c$ I6 w| 4
57| I4w#7c$ I6 w| 4
(1-55)
(1-56)
En el diagrama de Nyquist se observa que la parte imaginaria se hace cero en
y 0 y y ∞, los cuales son valores que no se pueden emplear. La frecuencia
de corte con el eje imaginario está dado por:
|< ~4#7c$#7c$
4
(1-57)
Al reemplazar los valores de los parámetros resulta que: y 6123,72Y/n y la
magnitud de la función de transferencia:
|t#{|< $| `q
#7c$
(1-58)
El período es:
<
|<
4
~4#7c$#7c$
La ganancia es:
< #c$ |t#{|
<
$|
#7c$
`q
(1-59)
(1-60)
43
De acuerdo a las reglas de Ziegler- Nichols, las ganancias del controlador PI para
el sistema son: [6]
] . q < #c$ .
8 . ] #c$
< #c$
.
#7c$
`q
(1-61)
#7c$ ~4#7c$#7c$
`q
4
(1-62)
Reemplazando los valores de los parámetros, resulta que:
Kp0,0056
(1-63)
Ki 6,578
(1-64)
En las figuras 1.27 y 1.28 se presentan los resultados de la simulación en
MATLAB, para el conversor con los datos suministrados y con condiciones
iniciales nulas:
Step Response
1
0.9
0.9
0.8
0.8
0.7
0.7
0.6
0.6
Amplitude
Amplitude
Step Response
1
0.5
0.4
0.5
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Time (sec)
Figura 1. 27: Respuesta paso de la corriente en el inductor
0
0
0.005
0.01
0.015
0.02
0.025
0.03
Time (sec)
Figura1.28: Respuesta paso del voltaje en el
capacitor (Voltaje de salida)
44
Se puede observar que la respuesta paso del voltaje de salida es
sobre-amortiguada y tiene un tiempo de establecimiento de 17.2 ms.
Como conclusión de las simulaciones anteriores, se puede anotar que el
controlador, que se obtiene a partir del modelo lineal, es estable mientras no
existan perturbaciones lejanas al punto de equilibrio. En este tipo de control se
necesita un limitador que garantice que la señal de control se encuentre entre
[0, 1], por lo tanto presenta problemas de saturación.
Por último, cabe recalcar que, para el análisis teórico de cada una de las técnicas
de control se supone lo siguiente:
•
Los dispositivos semiconductores son considerados como interruptores
ideales.
• Las pérdidas en los elementos inductivos y capacitivos son despreciadas.
• La alimentación continua se supone constante en el tiempo.
• La etapa de salida del convertidor está compuesta por un filtro paso bajo y
la carga R.
• El valor de los elementos de los conversores, tal que le permita trabajar en
modo de conducción continua.
45
2 CAPÍTULO II
ANÁLISIS, DISEÑO E IMPLEMENTACIÓN DEL
RECONSTRUCTOR INTEGRAL APLICADO A
CONVERSORES DC/DC.
2.1 TÉCNICAS
DE
SENSADO
EN
CONVERSORES
CONMUTADOS DC/DC [6]
Los conversores conmutados de potencia requieren el sensado de corriente en los
siguientes casos:
a) Al implementar el control en modo corriente, en la regulación del voltaje de
salida cuando se está realimentando el estado
completamente, y/o en la
protección de dichos circuitos frente a sobre-cargas.
b) En los conversores, donde la frecuencia de conmutación es del orden de
centenares de Kilohertz (KHz).
Es muy común usar los siguientes métodos de sensado:
2.1.1
RESISTENCIA DE SENSADO SERIE
Esta técnica es la forma convencional de
sensar corriente. Simplemente se
inserta una resistencia de sensado (R
en serie con el inductor. Si el valor
sensado )
de la resistencia es conocido, la corriente que fluye a través del inductor es
determinada, midiendo el voltaje en sus terminales. La precisión de este método
depende del tipo de resistencia usada. En la mayoría de los casos se utiliza una
resistencia metálica de constantán con coeficiente de temperatura cero.
46
2.1.2
SENSANDO DRAIN-SOURCE
Puesto que los MOSFETS actúan como resistencia cuando están en "ON", otro
método de sensado de corriente es medir el voltaje
entre
drain-source del
MOSFET durante el tiempo en que está en ON. La principal desventaja de esta
técnica es su baja precisión, porque la resistencia medida entre el drain y source
(RDS) depende de la temperatura y del voltaje entre drain-source, el cual a su
vez, varía con la frecuencia de conmutación.
2.1.3
FILTRO DE SENSADO
Esta técnica usa una red R-C, para filtrar el voltaje en el inductor y sensar la
corriente a través de la resistencia serie equivalente del inductor, denotada por RE.
Figura 2. 1: Filtrado de la corriente en el inductor
El voltaje en el inductor es:
4 #I !4$94
(2-1)
Donde L es la inductancia.
El voltaje en el capacitor es:
< 4
w!I; ;
#I w!4$94
w!I; ;
I
9
w! 4
w!
(2-2)
47
Donde
y
. Si
se obtiene que
en el capacitor sería directamente proporcional a
, de ahí el voltaje
. Para usar esta técnica es
necesario conocer el valor de L y RE, y luego calcular Rf y Cf, acorde a estos
valores.
2.1.4
SENSEFETs
Este es un método práctico para el sensado de corriente
corriente, en aplicaciones con
MOSFET de potencia utilizando SENSEFET. El principio del sensado de corriente
en un MOSFET se basa en el espejo de corriente
corriente, empleado en la fabricación de
circuitos integrados. Un espejo de corriente es una configuración con la que se
pretende obtener una corriente constante, esto es, una fuente de corriente. Esta
configuración consta de dos transistores,, idealmente idénticos, y una resistencia o
potenciómetro,, si se quisiera regular el circuito en el caso que los transistores no
fueran idénticos.
Figura 2.2:Diagrama
Diagrama de un SENSEFET
Figura 2.3: Resistencia de sensado
En la figura 2.2
2 se presenta el diagrama de un SENSEFET. Cuando la carga del
circuito está completa, la corriente principal en el drain fluye hacia el source. La
corriente sensada es del orden de 1/1000 de la corriente en el drain.
48
2.1.5
TRANSFORMADORES DE CORRIENTE
El uso de transformadores para el sensado de corriente es común en sistemas
de alta potencia. La idea es sensar una fracción de la corriente en el inductor
usando las propiedades de
la inductancia mutua de un transformador. Las
desventajas más importantes de este método son: su elevado costo, gran tamaño
y además, no permite obtener el valor de continua de la corriente.
El método de sensado que se escoge depende de los requerimientos de la
aplicación. Por ejemplo, el método de resistencia serie es común en aplicaciones
de corrección de potencia, por su precisión y simplicidad. Sin embargo, en
aplicaciones de alta corriente y bajo voltaje, los métodos más utilizados son los de
sensado de RDS y filtro RC, porque no inducen pérdidas de potencia apreciables
y no se requieren componentes costosos. Entre estas técnicas de sensado,
solamente el método SENSEFET es independiente de los valores externos de los
componentes (RDS, RL, L, R o C del filtro, entre otros).
Las características relevantes que deben cumplir los dispositivos sensores son:
•
El grado de influencia en el circuito debe ser mínimo;
• El ancho de banda debe ser extenso (mayor que la frecuencia de
conmutación);
• Precisión con respecto a la tolerancia en los parámetros y variaciones en la
temperatura;
• Poca sensibilidad al ruido de conmutación;
• Grado de complejidad razonable y bajo costo; y debe estar protegido contra
sobre-corriente.
Para eliminar la necesidad de sensar la corriente, también se tienen varias
alternativas. Por ejemplo, con los observadores de estado se pueden estimar las
49
variables de estado. Estos observadores se implementan mediante técnicas de
tipo discreto o continuo, y deben ser diseñados de tal forma que sean más rápidos
que la respuesta del sistema. Es importante remarcar que debido a la naturaleza
del convertidor, se ha reportado la utilización tanto de observadores lineales como
no lineales. También se puede utilizar, la estimación de la corriente de carga en
los conversores DC/DC y de esta manera poder determinar cuándo conmutar,
entre modo de conducción continua (MCC) y modo de conducción discontinua
(MCD).
Otra técnica basada en observadores de estado permite estimar la corriente a
de la relación voltaje-corriente del inductor , YZY, se obtiene la corriente en
partir del voltaje en el inductor, como se puede observar en la figura 2.4, a partir
el inductor integrando su valor de voltaje. Se debe tener en cuenta que el valor de
L debe ser conocido, para poder aplicar esta técnica. El valor de corriente
estimado se utiliza para implementar un lazo de control lineal y se realiza un
prototipo experimental.
L
D
IL
+
Vg
C
V0
Io
-
Figura 2.4: Técnica de sensado utilizando un observador de corriente
50
2.2
ANÁLISIS TEÓRICO DE LA RECONSTRUCCIÓN INTEGRAL
[4]
Otra opción para observar las variables de estado, es una técnica denominada
reconstrucción integral, la cual permite estimar las variables de estado utilizando
solamente una relación integral de la señal de entrada y salida del sistema. En el
ámbito de los conversores conmutados DC/DC, esta técnica se ha utilizado para
estimar la variable no medible en un control en modo deslizante, aplicada a un
convertidor boost. La superficie de deslizamiento modificada utiliza un
reconstructor integral para reemplazar la corriente del inductor y además, adiciona
un término integral para compensar el desconocimiento de las condiciones
iniciales del estimador.
A continuación, se describen los conceptos que explican la reconstrucción integral,
como precedente teórico, para la estimación de las variables de estado en los
lazos de control propuestos, además, se detallan algunos ejemplos para ilustrar la
teoría. En particular, se presenta la realización experimental de un reconstructor
integral de corriente aplicado a un conversor boost.
!`#!$ `#!$ #!$
Suponiendo un sistema lineal invariante en el tiempo de la forma:
#!$ `#!$
Donde - LL , - LJ y - L
(2-3)
(2-4)
De (2-3) se puede escribir X(s) como:
`#!$ `#!$
!
#!$
!
(2-5)
Para la segunda derivada de x(t) se tiene:
`#!$ !
`#!$
!
#!$
!
(2-6)
51
De forma análoga para un sistema de tercer orden, se cumple que:
`#!$ # $
V ` !
V
!
!V
!
#!$
!
(2-7)
Y por recurrencia, para un sistema de orden u>1 se cumple,
`#!$ !7 `#!$ ∑8? 87 !78 #!$
(2-8)
La salida (2-4) y sus u-1 derivadas se pueden escribir como:
1
C
0
s
CA
CB
s2
CA2
sCB + CAB
3
3
U ( s )
2
2
Y
(
s
)
=
X
(
s
)
+
s
CA
s CB + CABs + CA B
3
2
2
3
s4
CA4
s CB + CABs + CA Bs + CA B
M
M
M
u −2
u −3
2
u−4
u −3
u −2
s u −1
CAu −1
s CB + CABs + CA Bs + L + CA Bs + CA B
(2-9)
Suponiendo que el sistema (2-3) – (2-4) es observable. Es decir, la matriz
[C
CA CA2
]
CA3 CA4 L CAu −1 tiene un rango u, se puede despejar X(s) de
la ecuación (2-9), obteniéndose lo siguiente:
C
CA
CA 2
X ( s ) = CA 3
CA 4
M
u −1
CA
−1
1
0
CB
s
s 2
sCB + CAB
3
U (s)
s Y ( s ) − s 2 CB + CABs + CA 2 B
3
2
2
3
s 4
s CB + CABs + CA Bs + CA B
M
M
u −2
u −3
2
u−4
u −3
u −2
s u −1
s
CB
+
CABs
+
CA
Bs
+
L
+
CA
Bs
+
CA
B
(2-10)
Al reemplazar (2-10) en el lado derecho de (2-8) y considerando u lo
suficientemente grande, se obtiene un sistema de la forma:
52
Y1
X1
U1
M = P ( s −1 ) M + Q ( s −1 ) M
Y p
X n
U m
(2-11)
Donde P y Q son matrices de nxp y nxm respectivamente y son los coeficientes
reales de la variable s-1. Estas matrices se pueden expresar como:
C
CA
CA 2
P( s −1 ) = Au s −u CA3
CA 4
M
u −1
CA
C
CA
CA 2
Q ( s −1 ) = − Au s −u CA3
CA 4
M
u −1
CA
−1
1
s
s2
3
s
s4
M
s u −1
(2-12)
−1
0
CB
u
sCB + CAB
+ Ai −1 Bs −1
2
2
s
CB
+
CABs
+
CA
B
∑
3
2
2
3
i =1
s CB + CABs + CA Bs + CA B
M
u−2
u −3
u−4
u −3
u −2
2
s CB + CABs + CA Bs + L + CA Bs + CA B
De acuerdo con la transformada de Laplace, el término
E
A
(2-113)
indica la integral
"7 N#$Y. Por lo tanto, la expresión (2-11) se denotará como reconstructor
U
integral u observador integral.
# , … , L $ se puede expresar como una
Se define la propiedad de reconstructibilidad, que equivale a la de observabilidad,
cuando toda componente de estado
combinación lineal de las variables de control # , … , L $, de la salida
R #R , … , RL $ y de sus derivadas.
Esta técnica también se ha aplicado en diferentes áreas, en la tabla 2.1 se
53
resumen las aplicaciones y el procedimiento para poder generar leyes de control,
en diversos sistemas lineales y no lineales. Los pasos a seguir para reconstruir las
variables de estado son los siguientes:
1. Obtener el modelo dinámico del sistema real, aplicando por ejemplo las leyes
de Kirchhoff en los circuitos eléctricos o sumatorio de fuerzas en los sistemas
mecánicos, etc.
2. Realizar un cambio de variables para obtener la dinámica normalizada y
comprobar que sea controlable y observable.
3. Determinar cuál es la variable de fácil medición.
4. Obtener la variable útil para el control, en términos de la integral de la entrada y
la salida del sistema (señal medida).
5. Calcular el valor estimado de la variable anterior, es decir se elimina la
condición inicial.
6. Obtener la ley de control con los valores estimados.
2.3 RECONSTRUCCIÓN INTEGRAL APLICADA A CONVERSORES
DC/DC [5]
En esta sección se desarrolla, como ejemplo de aplicación de la técnica de la
reconstrucción integral de variables de estado al conversor de
boost. A
continuación, se explica el análisis teórico para reconstruir la corriente en el
inductor y posteriormente se ilustra el diseño experimental de tipo analógico.
54
EJEMPLO: Reconstrucción integral de la corriente en el conversor Boost
El conversor boost de la figura 2. 6, produce un voltaje de salida mayor en relación
con el voltaje de entrada.
periódicamente
un
Este convertidor funciona abriendo y cerrando
interruptor
electrónico
almacenamiento de energía: el inductor L
y
posee
dos
y el capacitor C.
elementos
de
Analizando los
circuitos resultantes, tanto en la configuración ON (u=1) como en la configuración
OFF (u=0), se obtienen las ecuaciones que definen el sistema.
Figura 0.6: Conversor Boost
4
%
%
%
%
& * # * $
# * $ *
I
(2-14)
(2-15)
Donde x1 y x2 son las variables de estado, corriente en el inductor y voltaje en el
capacitor, y las constantes Vg y R son los valores del voltaje de alimentación y el
valor de la carga resistiva, respectivamente.
La salida es el voltaje en el capacitor, por lo tanto:
P (2-16)
De acuerdo a (1-42) el sistema (2-14) y (2-15) se puede representar con un
modelo incremental de la forma:
55
b oW # * $ca X
b W# * $`a # * $
b Xp o# * $
b
bp
(2-17)
Las variables de estado y las entradas de control se representa por:
b#
$
#
$ `a (2-18)
b #
$
#
$ ca
(2-19)
Para el conversor de boost, las matrices de transición son:
* I
r *
*
4
&
(2-20)
&
(2-21)
4 4 s
I
El punto de equilibrio
`a r
&
I#7ca $
s
&
7ca
¡
8a
¢
a
(2-22)
Donde De es el ciclo de trabajo en estado estacionario.
Para poder aplicar (2-11) se aproxima la dinámica incremental a un modelo lineal,
en el cual se desprecia el término bilineal hh de (2-17).
El modelo lineal
corresponde a la dinámica:
4
%u
%
%u
%
b
u#
*
* ca $ a
u#
* ca $ *
u
I
b
* 8a
(2-23)
(2-24)
56
d #!$
!d̀ #!$ d̀ #!$
Utilizando la transformada de Laplace se obtiene:
(2-25)
d#!$ d̀#!$
Donde
*
r7ca
(2-26)
7ca
*
4
I
s
r
a
4
8a s
*
W X
y
£
d̀ #!$ ` #!$ (2-27)
£ #!$
`
Considerando el sistema (2-18) y (2-19) es observable, lo que se puede verificar
con la matriz de observabilidad (2-26) cuyo rango es 2.
7ca
*
I
(2-28)
Se busca una parametrización que permita relacionar las variables de estado con
la señal de entrada h y la señal de salida Rh. Para lograrlo, se deriva la expresión
(2-25) y se despeja e¤ #n$:
d̀ #!$ d̀ #!$
d# $
!
!
!
!
(2-29)
La señal de salida y su primera derivada se pueden expresar como:
d# $
d# $
2 3
! 2 3 d̀ #!$ 2 3
!
!
(2-30)
Si se despeja de (2-30) la transformada de Laplace de la variable h#$, se obtiene:
57
d̀ #!$ 2 3
7
d# $
7 d
2 3
! *2 3 2 3
#!$
!
(2-31)
Y sustituyendo (2-31) en el lado derecho de (2-29) resulta:
d̀ ¥2 3
!
7
d# $
7 d # $¦
d #!$
2 3
! *2 3 2 3
!
!
!
!
(2-32)
Como se puede observar en (2-30), la variable de estado se adquiere a partir de
una expresión que incluye la salida y la señal de entrada. Evaluando cada uno de
estos términos, resulta que:
*
7ca
4!
d̀ #!$ §r
d#!$ * r
s
#7ca $ Iw4!
*
I4!
#7ca $8a
4!
8a
I!
#7ca $8a
d #!$¨ )#vca $a 8a
s
w
4!
4
!
I
a
4!
*
8a
!
d #!$
.
(2-33)
d#n$, se obtiene:
Agrupando los términos que dependen de ©¤#n$ y de ª
d̀ #!$ *
7ca
a
4!
!4
d#!$ r
d #!$
r #7c $ Iw4!s
s
78a wa #7ca $
a
*
4!
I4!
La señal de corriente
(2-34)
del inductor reconstruida se extrae directamente de la
primera fila de esta ecuación matricial y se expresa como:
£ #!$ * 7ca
d #!$ a
d #!$
`
!4
!4
£ #n$ resulta:
Al reemplazar ©¤#n$ e
£ #!$ * 7ca `
£ #!$ a
d #!$
`
!4
!4
(2-35)
(2-36)
58
Dado que el término
E
A
nos indica la integral "7 N#$Y se obtiene directamente de
U
la ecuación (2-36) que:
u#
$
" *
7ca
4
u#$
a
4
b %
(2-37)
Si se compara (2-37) con la primera fila del modelo lineal del convertidor de boost
(2-23), se puede ver que las dos expresiones coinciden. Por lo tanto, se puede
representar (2-37) como una expresión no lineal que no incluya el término Ve. De
(2-14) se extrae que el valor estimado de la corriente se puede escribir como:
«#
$
"
&
4
*
#$
4
# * $ %
(2-38)
Ahora se demuestra que (2-37) es análoga a la expresión (2-36). Si se considera
la representación incremental de las variables h gf y u f . El voltaje
de entrada en el conversor de boost se expresa por 0 #1 * gf $f lo que se
reescribe como:
«#
$
"
a #7ca $
u #$w
* 4 a #
4
b $ %
* ca *
(2-39)
Simplificando:
«#
$
" *
u#$
4
# * ca $ Si se desprecia el término
u#$
b
4
u#­$®
b
¬
a
4
b %
(2-40)
la resultante es idéntica a (2-37) y puede ser
entre el valor estimado de «
#$ y está dado por:
considerado el valor estimado en lazo abierto de la corriente del inductor. El valor
«#
$
#
$ #$
(2-41)
59
Donde #0$ es la condición inicial de la corriente en el inductor.
Una vez analizada la vialidad de encontrar la corriente del inductor, a partir de la
señal de entrada y de salida del conversor, a continuación se describe como se
lleva a cabo la verificación experimental.
2.4 DISEÑO Y SIMULACIÓN DEL CONVERSOR DE BOOST
Se diseña un conversor DC/DC en topología elevadora, es decir, un conversor
boost operando en modo de conducción continua, trabajando con un voltaje de
entrada de DC de 10 V, con una frecuencia de conmutación de 50 KHz, con
voltaje de salida de 20 V, con la restricción de que la variación del voltaje de salida
debe estar por debajo del 1%, tomado en cuenta lo antedicho se hace un cálculo
para que la salida trabaje al 0.8%. La carga es una resistencia de 10 ohms. Se
simula dicho convertidor utilizando el paquete de simulación Pspice 9.2 de Orcad
para la validación de resultados.
Voltaje de entrada
Vin=10VDC
Frecuencia de conmutación
Fs=50KHz
Voltaje de salida
Vo=20V
Carga
10Ω
Ciclo de trabajo
8¯
7
(
(2-42)
* KL 20 * 10
0.5
20
Potencia de entrada
°8¯ 8¯ . 98¯
(2-43)
60
Idealmente, la potencia de salida es igual a la potencia de entrada
° . 9
(2-44)
Por tanto:
. 9 8¯ . 98¯
98¯ .9
8¯
Período
(2-45)
±
(2-46)
! ; ²³´ !
!
(2-47)
. ! . #!$ !
µµ # * $! . #!$ !
(2-48)
(2-49)
Cálculo de la inductancia
Mediante la ecuación (1-30):
4 ;
I
!
# * $ #²³´$ . # * . $ ³
(2-50)
Para garantizar la conducción continua el valor del inductor debe ser mayor que
12.5 uH.
Cálculo del capacitor
Empleando la ecuación (1-32):
;! I
.
#²³´$
µ
(2-51)
Para garantizar la conducción continua el valor del capacitor debe ser mayor que
500 uF.
61
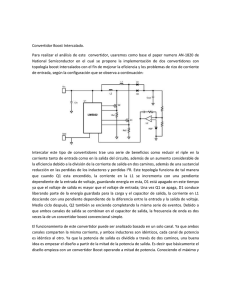
El conversor de Boost se controla a través del terminal GATE del transistor
(IRF150), enviando una señal PWM.
Rs
V+
L1
1
0.025
Vdr
MBR745
2
100uH
R
10V
V1
IRF150
C1
10
SEÑAL DE CONTROL u
100uF
Figura 2.7: Conversor de Boost
Cada uno de los términos de la función a integrar
« #$ "¶ *
U BC
¬ #­$
de la ecuación (2-38)
#1 * $ Y se implementa de la siguiente manera:
Término #$#1 * $.
Donde u es la señal de control y x2 es el voltaje del
capacitor de salida, esta expresión se puede interpretar como la señal de salida
conmutada, donde el chopeado es de sentido contrario al de la señal de control u.
poder obtener una señal similar a la del término #$#1 * $. La diferencia está
Por tanto, para evitar el uso de multiplicadores se utiliza la salida del DRAIN para
en el valor de caída de voltaje del diodo, que es aproximadamente 0.60V en
polarización directa. En la figura 2. 7, este voltaje corresponde a vdr.
Término Vg este valor representa el voltaje de entrada del conversor, tiene un
valor de 10V. Se representa por V+.
Integral
"¶ *
U BC
¬ #­$
#1 * $ Y. Para poder realizar experimentalmente la
expresión (2-38) se puede optar por utilizar un integrador puro o un circuito RC
que realice la misma función. La segunda alternativa es una mejor opción, debido
a que al implementar un integrador con amplificadores operacionales, puede
presentar problemas de saturación.
62
El circuito RC que se indica en la figura 2.
2.8 es un filtro pasa-bajos
bajos que tiene la
siguiente función de transferencia
(2-52)
Los valores seleccionados para estos elementos son C=540uF y R=1kΩ.
Figura 2.8: Diagrama del reconstructor integral
En la figura 2.9 se ilustra el diagrama
diagrama del circuito reconstructor. La
L resta de V+ y
Vdr se realiza mediante amplificadores operaciones con ganancia 1. La ganancia
g
de la integral se ajusta con un
segundo operacional en configuración no
inversora, además se utiliza un potenciómetro, para precisar la ganancia.
En la figura 2.9 se ilustra el circuito tanto del conversor de boost como del
reconstructor integral.
63
R7
10k
+12V
Vdr
+12V
U5A
OUT
R5
3
+
U6A
-
LM324
V-
1k
OUT
2
-
LM324
C3
-12V
540u
1
V-
10k
R13
1
11
2
4
+
11
3
10k
V+
R4
V+
4
V+
-12V
R12
R9
1k
50k
R6
10k
Figura 2.9: Circuito del reconstructor integral
Las formas de onda obtenidas tanto de la corriente en el inductor como de la
salida del reconstructor integral son la que se indica en la figura 2.10.
Figura 2.10: Corriente en el inductor y corriente reconstruida
Cabe recalcar, esta técnica sólo es aplicable en aquellos sistemas que sean
observables, por ese motivo es importante comprobar esto antes de proceder al
análisis.
64
3 CAPÍTULO III
ANÁLISIS, DISEÑO E IMPLEMENTACIÓN DEL
CONTROL EN MODO DE DESLIZAMIENTO APLICADO
A CONVERSORES DC/DC
3.1 NOCIONES BÁSICAS DEL CONTROL EN MODO DESLIZANTE
[2]
El control en modo deslizante tradicional, se puede definir como la aplicación de
una señal de control que conmuta a alta frecuencia y consigue llevar el estado del
sistema a un campo escalar S(x), denominado superficie de deslizamiento. La
superficie será definida por el diseñador del sistema de control, con el objeto de
que el estado cumpla las especificaciones deseadas. La principal ventaja de este
control es su robustez ante perturbaciones, cuando éstas tienen cotas conocidas.
A continuación, se realiza el análisis de esta técnica considerando un sistema no
lineal de la forma:
;#$ &#$
(3-1)
Donde · g de - L es un vector de estado y las funciones f y g son campos
vectoriales suaves con ¸#$ ¹ 0 para todo . Si se asume que el estado es
medible y que se puede definir el campo escalar S(x), representado por una
función suave en el domino D, definida como superficie de deslizamiento de la
forma (3-2), se puede sintetizar un control discontinuo u para conseguir que x(t)
º o#. $»c I, #$ p
tienda a la superficie.
(3-2)
Donde ¼ tiene dimensiones n-1. El diseño de esta superficie debe ser de tal forma
que, el movimiento del sistema se restrinja a ¼ , para que pueda existir el
comportamiento deseado, ya sea el de regulación o seguimiento.
65
La superficie de deslizamiento más habitual en conversores conmutados DC/DC,
tiene la siguiente forma:
#$ # * `a $
(3-3)
Donde ef es un vector constante y ½ ¾ son coeficientes escalares constantes. La
función S(x)
se asociará al error de las variables de estado, por lo tanto, se
deberá asegurar que el sistema sea capaz de alcanzar el estado S(x)=0, desde
una condición inicial distinta de cero y, una vez alcanzado, la acción de control
debe mantenerlo en aquel lugar. Estas condiciones matemáticamente se pueden
escribir como:
%
%
%
¿ 0 cuando #$ À 0
%
À 0 cuando #$ ¿ 0
(3-4)
Es decir, cuando el sistema está fuera de la superficie, el movimiento del sistema
con respecto al tiempo
SÁ
SU
es en tal dirección que se dirige hacia la superficie. Por
consiguiente, se aplicará un control u, tal que:
¥
w ]Q^Q #$ À 0=
7 ]Q^Q #$ ¿ 0
(3-5)
Y se debe comprobar que se cumplan las condiciones (3-4), es decir:
%#$
=
%
Â
%#$
=
%
?Ã
Â
?v
¿0
(3-6)
À0
(3-7)
De esta forma, el sistema se encuentra en modo deslizante sobre la superficie
S(x) si el control conmuta continuamente entre w y 7 , cumpliendo las
condiciones (3-6) y (3-7).
La figura 3.1 muestra un ejemplo de conmutación
cuando se ha introducido una banda de histéresis.
66
Figura 3.1: Ejemplo con banda de histéresis finita en modo deslizante
Al ir decreciendo la anchura de la banda de histéresis la conmutación
incrementará su frecuencia.
3.2 DESCRIPCIÓN VECTORIAL DEL CONTROL EN MODO
DESLIZANTE [7]
Los conversores conmutados DC/DC son sistemas de estructura variable y se
pueden describir de forma genérica por el siguiente modelo bilineal:
%
%
;#$ &#$ # Ä$
(3-8)
Estos sistemas están controlados en modo deslizante cuando se utiliza la Ley de
Control (3-5), donde w 1 y 7 0 o viceversa, además existe una región R
donde alcanza el modo deslizante. Matemáticamente, se puede expresar que la
condición necesaria y suficiente para alcanzar la superficie S(x)=0, estará dado
por:
67
ÆÇÈ Ã
!#$É
ÆÇÈ
!#$Év
%#$
%
%#$
%
¿ 0 es decir,
À 0 es decir,
ÆÇÈ ÊË, ;#$ &#$wÌ ¿ 0
!#$ÉÃ
ÆÇÈ ÊË, ;#$ &#$7Ì À 0
!#$Év
(3-9)
Donde ÍÅ es el gradiente de S(x) y Ê, Ì denota el producto escalar. Se puede
definir que existe un modo deslizante si las proyecciones de N # $ ¸#$ w y de
N # $ ¸#$ 7 sobre el gradiente de S(x) son de signos opuestos y apuntan hacia
la superficie. Gráficamente, se puede observar en la figura 3.2 la dirección de
estos vectores.
N#$ ¸#$ w
N # $ ¸#$ 7
ÊÍÅ, N # $ ¸#$ wÌ
ÍÅ
Å# $ 0
ÊÍÅ, N# $ ¸#$ 7 Ì
Figura 3. 2: Descripción vectorial de la condición de transversalidad
3.3 EXISTENCIA DEL MODO DESLIZANTE
Bajo estas premisas, se determina que la dinámica promediada o dinámica ideal
de deslizamiento, se caracteriza por las condiciones de invarianza:
#$ %#$
%
(3-10)
(3-11)
68
Estas condiciones expresan el hecho que, idealmente, las trayectorias de estado
están evolucionando sobre la superficie de deslizamiento. Cuando el sistema
cumple estas condiciones su comportamiento se puede precisar a través de la
"dinámica ideal de deslizamiento". Esta dinámica implica la existencia de un
control equivalente denotado por ueq, el cual mantiene al sistema en la superficie
de deslizamiento, es decir, obliga a que el movimiento del sistema sea tangente a
la superficie y representa la dinámica de una anchura de histéresis cero o
frecuencia infinita. (Figura 3.3).
f#x, t, uw $ 0
f#x, t, u7 $ 0
Å#$ 0
Figura 3. 3: Descripción vectorial del control equivalente
Matemáticamente, se puede encontrar ueq de (3-11):
%#$
%
·
%
%
ÊË, ;#$ aÓ &#$Ì (3-12)
Despejando se obtiene:
aÓ ÊË,#wÄ$Ì
ÊË,#w $Ì
(3-13)
De (3-13) se deduce una condición necesaria, para la existencia del modo de
deslizamiento de S(x):
ÊË, # Ä$Ì ¹ (3-14)
Es decir, para que el control esté definido por Ô, no puede ser tangente a
S(x). A la ecuación (3-14) se le denomina condición de transversalidad.
69
3.4 REGIONES DE DESLIZAMIENTO
Ahora se define las regiones donde se aplica w y 7 y las cotas dentro de las que
debe estar ueq, para que se cumplan las condiciones de deslizamiento. Si se tiene
en cuenta las expresiones (3-8) y (3-9), se puede escribir:
ÊË, ;#$ &#$w Ì ÊË, # $ w# Ä$Ì ¿ 0
ÊË, ;#$ &#$7 Ì ÊË, # $ 7# Ä$Ì À 0
(3-15)
(3-16)
Multiplicando (3-16) por (-1):
ÊË, *;#$ * &#$7Ì ÊË, *# $ * 7# Ä$Ì ¿ 0
(3-17)
ÊË, #w * 7 $# Ä$Ì ¿ 0
(3-18)
ÊË, # Ä$Ì ¿ 0
(3-19)
Sumando (3-15) y (3-17):
Si se considera que w À 7, se tiene:
ÊË, #w * aÓ $# Ä$Ì ¿ 0
Por otra parte, restando (3-12) de (3-15), se obtiene:
(3-20)
Y teniendo en cuenta (3-19):
w * aÓ À 0
(3-21)
ÊË, #7 * aÓ $# Ä$Ì À 0
(3-22)
Restando (3-12) de (3-16) se obtiene:
Esto implica:
7 * aÓ ¿ 0
(3-23)
De modo que el control equivalente cuando w À 7 debe estar acotado de esta
manera:
7 ¿ aÓ ¿ w
Considerando 7 À w se obtiene de forma similar:
(3-24)
70
w ¿ aÓ ¿ 7
(3-25)
Se puede concluir, que el control equivalente puede estar acotado de la siguiente
forma:
ÈÇÕ #7 , w $ ¿ aÓ ¿ ÈÖ× #7 , w$
(3-26)
De modo que fØ queda definido como una banda alrededor de la superficie de
Iw o ÙÕ : ÊË, ;#$ &#$wÌ ÊË, # $ w # Ä$Ì ¿ 0p
deslizamiento. En cuanto a la región de deslizamiento, se puede expresar como:
I7 o ÙÕ : ÊË, ;#$ &#$7 Ì ÊË, # $ 7 # Ä$Ì À 0p
(3-27)
3.5 ESTUDIO DE ESTABILIDAD
Una vez determinada la existencia del régimen deslizante, la dinámica viene dada
por las condiciones de invarianza (3-10) y (3-11). Dado que el punto de equilibrio
en estado estacionario q , se calculará haciendo nulas las derivadas de las
variables de estado, es decir:
#q $ aÓ #q Ä$ (3-28)
La existencia de un punto de equilibrio no implica que la dinámica del sistema, en
dicho punto sea estable, por tanto se deberá determinar la estabilidad para
asegurar el correcto funcionamiento del control. También es necesario evaluar la
robustez del sistema realimentado, es decir, verificar el buen comportamiento del
sistema a pesar de que existan perturbaciones en la línea o en la carga. En control
en modo deslizamiento, estas perturbaciones deben tener cotas bien definidas,
para que el sistema realimentado pueda deslizarse en la superficie.
A
71
continuación se explica que condiciones deben cumplir estas perturbaciones para
que exista régimen deslizante.
3.6
RECHAZO A PERTURBACIONES
Si se considera que el sistema (3-1) sufre una perturbación p(x,t),
tal que la
dinámica se convierta en:
;#$ &#$ ]#, $
(3-29)
El modo deslizante ideal presenta la propiedad de invarianza “fuerte” con respecto
a p(x,t) si y solo si, la dinámica ideal de deslizamiento es independiente de p(x,t).
]#, $ !]Q¯o&#$p 1
(3-30)
Cuando la perturbación p(x,t) no verifica la condición (3-30), se dice que existe una
propiedad de invarianza débil.
La justificación de esta definición resulta del hecho de que, si Û#. $ nÛÜ o¸#$p,
entonces Û#, $ se puede descomponer por una suma única de dos vectores; uno
a lo largo de g(x) y el otro a lo largo del espacio tangente a la superficie S(x), a
saber:
]#. $ &#$[#, $ Ý#, $
Donde \ #, $ es un campo escalar y Þ#, $ es un campo vectorial.
1
(3-31)
Cuando A es un subconjunto de V, la familia de todas las combinaciones lineales formadas con
vectores de A se denomina Span(A) y es evidentemente un subespacio vectorial de V.
72
Nótese que el movimiento deslizante ideal no se ve afectado por ¸#$\ #, $,
mientras que Þ #, $ es tangencial a S(x), es decir Þ#, $ no afecta la existencia
local del movimiento deslizante, aunque afecta a la dinámica ideal de
deslizamiento dentro de su movimiento restringido en S(x).
El diseño de una superficie de deslizamiento apropiada para conformar el campo
vectorial deseado, independiente de p(x,t), puede solamente lograrse cuando la
condición (3-30) se satisface.
vector de perturbación Û#, $ ¸#$\ #, $, es tal que \#, $ está acotado por:
Si el modo deslizante existe para el sistema perturbado (3-30), necesariamente el
aÓ * 7 ¿ \#, $ ¿ aÓ * w
(3-32)
3.7 ESTRATEGIA PARA LA APLICACIÓN DEL CONTROL EN
MODO DESLIZANTE (8)
1. Definir la superficie de deslizamiento en función de los errores de las
variables de estado.
2. Determinar si se cumple la condición de transversalidad y determinar las
premisas que debe satisfacer el sistema, para que esta condición sea
válida.
3. Si se cumple la condición de transversalidad, se puede obtener el control
equivalente ueq.
4. Definir las regiones de deslizamiento de acuerdo a la cota que debe cumplir
ueq.
73
5. Determinar la dinámica ideal de deslizamiento reemplazando ueq en la
dinámica del sistema.
6. Obtener los puntos de equilibrio de la dinámica ideal.
7. Analizar la estabilidad de los puntos de equilibrio.
8. Realizar el estudio de la robustez del sistema frente a posibles
perturbaciones en la señal de entrada y en la carga.
9. Simular el sistema en lazo cerrado.
10. Implementar experimentalmente el control.
3.8 CONTROL
EN
MODO
DESLIZANTE
APLICADO
AL
CONVERSOR BOOST [8]
Para el análisis se considera la representación bilineal del conversor boost.
Figura 3. 4: Conversor Boost
4
%
%
%
%
& * # * $
# * $ *
I
(3-33)
(3-34)
74
Siendo y las variables de estado, corriente en el inductor y voltaje en el
capacitor, respectivamente, y las constantes 0 , el voltaje de entrada y - , el valor
de la carga resistiva. Las ecuaciones de estados en modo ON y OFF pueden
escribirse como:
8 8 para 8 , (3-35)
Siendo 2 3 el vector de estado y las matrices de transición para cada
intervalo:
ß
&
, 4 , r
*
Ùà
*
&
s y 4 *
I
4
La ecuación (3-35) se puede compactar en una única expresión bilineal, donde la
variable refleja la acción de control:
# Ä$
,
,
Donde:
0
r *
á
3.8.1
*
*
âá
s
(3-36)
* BC
( 0
P Ä * r
0
*
á
0
s y
(3-37)
0
Ô2 3
0
DEFINICIÓN DE SUPERFICIE DE DESLIZAMIENTO
En los conversores de potencia es importante que el voltaje de salida permanezca
constante, para conseguirlo se puede optar por controlar indirectamente esta
variable, por medio de las corrientes que fluyen en el circuito.
Por tanto, entre
algunas posibilidades de definición de superficie de deslizamiento #$ se puede
optar por:
75
#$ o#, $ I: * ; <¯!
Q¯
ap
(3-38)
Es decir, se busca que el sistema logre una corriente en el inductor constante para
que el voltaje de salida se mantenga fijo.
A continuación, se analiza las condiciones del régimen deslizante.
3.8.2
CONDICIÓN DE TRANSVERSALIDAD
Para que el sistema pueda alcanzar el régimen de deslizamiento es necesario que
el vector ÊÍÅ, ÔÌ sea diferente de cero:
ÊË, ÄÌ ÊW
X, /
4
1Ì
*
4
(3-39)
Si se considera ¹ 0, se cumple la condición de transversalidad.
3.8.3
CÁLCULO DEL CONTROL EQUIVALENTE
El control equivalente fØ se obtiene al calcular la división de gradientes (3-13):
aÓ *
3.8.4
&
(3-40)
REGIONES DE DESLIZAMIENTO
Las regiones de deslizamiento se definen al considerar las cotas que debe cumplir
el control equivalente:
ÈÇÕ#, $ ¿ aÓ ¿ ÈÖ× #, $
(3-41)
El mínimo valor debe ser cero y el máximo uno, por lo tanto:
*
&
(3-42)
76
Si À 0, entonces À 0 À 0.
La existencia de la condición de invarianza
requiere que el voltaje en el capacitor exceda al voltaje de entrada.
3.8.5
DINÁMICA IDEAL DE DESLIZAMIENTO
La dinámica de deslizamiento ideal se obtiene al reemplazar la ecuación (3-40) en
(3-36), obteniéndose:
%
*
%
%
4
&
*
I
*
aÓ 4
Entonces ½
%
3.8.6
4
aÓ *
*
4
I
&
4
*
4
*
*
&
&
*
I
(3-43)
&
(3-44)
PUNTO DE EQUILIBRIO
Una vez que se alcanza la superficie de deslizamiento, se espera que el estado
equilibrio #q ½, q $ las derivadas de las variables de estado serán nulas. Por
del sistema evolucione hasta llegar a un punto de equilibrio. En este punto de
lo tanto de la ecuación (3-44) se obtiene:
*
q &
I q
De donde:
q ~& I
(3-45)
Los asteriscos indican que se tratan de coordenadas de equilibrio. El punto de
equilibrio está localizado en:
5q , q ~& I6
(3-46)
77
3.8.7
ANÁLISIS DE ESTABILIDAD DEL PUNTO DE EQUILIBRIO
Para determinar la estabilidad del sistema, se identifica la posición de los polos
del sistema, cuando el sistema se encuentre deslizándose sobre la superficie y
alcance el punto de equilibrio. Un método habitual es aplicar la transformada de
Laplace a las ecuaciones de la dinámica de deslizamiento ideal del sistema.
Para poder aplicar la transformada, primero se linealiza la dinámica de alrededor del punto de equilibrio, siguiendo la aproximación de Taylor.
%
= Â
%
48¯aQä8´.
5;# $6 å ;# q $ =
%;
Â
% ?q
# * q $
(3-47)
Donde:
;# $ * I &
(3-48)
En el punto de equilibrio 5q ½, q ~½0 -6, N# $ 0 por lo tanto:
=% Â
æ* I *
%
= *
%
48¯aQä8´.
&
5q 6
ç # * q$
(3-49)
Evaluando en q ~½0 - se obtiene:
Â
%
48¯aQä8´.
I
# * q $
(3-50)
La transformada de Laplace de esta ecuación diferencial es:
!` #!$ * I ` #!$ * * I ` q
(3-51)
La ecuación característica del sistema será n que el sistema es asintóticamente estable.
âá
0, por lo que se demuestra
Por lo tanto, el conversor boost
alcanza la superficie de deslizamiento de (3-38) y el punto de equilibrio (3-46), si
se cumplen las siguientes condiciones:
¿ & ¿ À 0
(3-52)
78
3.8.8
SIMULACIONES DEL CONTROL EN MODO DE DESLIZAMIENTO EN
EL CONVERSOR DE BOOST
Se realizan las simulaciones en SIMULINK para comprobar la respuesta del
conversor de boost utilizando un lazo de corriente. La figura 3.6 corresponde a la
respuesta temporal de las variables de estado, corriente en el inductor y voltaje en
el capacitor, para los siguientes parámetros:
R=100[Ω],
L=100[µH],
C= 100[µF],
Vg= 10[V],
V*=20[V],
i*=4[A], y las
condiciones iniciales son cero. Los rizados de corriente son de 480mA pico-pico y
de voltaje, 80mV pico-pico.
Figura 3. 5: Simulación control por deslizamiento
Figura 3. 6: Respuesta del conversor Boost al aplicar la superficie de deslizamiento
79
En la figura 3.7
7 se ilustra el plano de estado, en el que se puede observar que las
variables de estado solo alcanzan la superficie cuando se cumple que
. Esto trae como consecuencia un sobre-impulso
sobre impulso importante en la señal
de corriente de aproximadamente 11
11[A].
Voltaje en el capacitor
Corriente en el inductor
Figura 3. 7: Plano de estado
En la figura 3.8 se observa la señal de control con una frecuencia de conmutación
aproximada de 100kHz, cuando la banda de histéresis es de 0.46V.
Figura 3.8: Señal de control
80
3.9 APLICACIÓN
DEL
MODO
DESLIZANTE
A
LOS
RECONSTRUCTORES INTEGRALES [7]
Uno de los problemas más importantes, para la implementación práctica del
control en modo de deslizamiento, es la adquisición de las variables de estado, por
ejemplo en las superficies planteadas se requiere un lazo de corriente, este lazo
perjudica la eficiencia debido al sensor de corriente. Como alternativa al sensado
de corriente, se plantea la generación de corriente haciendo uso de
reconstructores integrales, utilizando superficies de deslizamiento.
3.9.1
APLICACIÓN DE LOS RECONSTRUCTORES INTEGRALES EN EL
CONTROL EN MODO DESLIZANTE PARA EL CONVERSOR DE BOOST
Considerando las expresiones que modelan el conversor boost de la figura 3.4,
con un punto de equilibrio (Ve, ie), se puede estimar la corriente que fluye por el
inductor,
utilizando un reconstructor integral, es decir la corriente se puede
escribir como una parametrización integral de la entrada y la salida, como se
expresa en la siguiente ecuación:
«#
$
"
&
4
*
#$
4
# * $ %
(3-53)
Este valor estimado denotado por «#$
se va a emplear para construir la
superficie de deslizamiento propuesta en la ecuación (3-38).
º
è#$ o# , $ I : * ; <¯!
Q¯
ap
(3-54)
81
Considerando que «
#$ difiere de su valor en una cierta constante #0$, se tiene
que:
«#
$
#
$ #$
(3-55)
Siendo necesario introducir una expresión con la acción integral del error #ζ$ para
estabilizar el voltaje de salida.
Por lo tanto, el controlador en modo de deslizamiento, basado en el reconstructor
integral tiene la siguiente forma:
¥
]Q^Q º
è #P, , ê$ À 0=
]Q^Q º
è #P, , ê$ ¿ 0
º
è#P, , ë$ "
&
4
*
#$
4
ê * a ; ê#$ # * $ % *
(3-56)
a I&
ê
Con ½ una constante de diseño estrictamente positiva.
(3-57)
(3-58)
Bajo estas premisas, entonces la dinámica del conversor Boost, al considerar el
término integral, es:
4
%
%
& * # * $
%
# * $ *
%ê
%
* a
I
(3-59)
(3-60)
(3-61)
Y la ecuación bilineal que representa este sistema es:
# Ä$
(3-62)
82
Donde:
0
*
)
0 . )*
á
0
0
*
âá
0
1
á
0
0
0
BC
0 0.
0 0
(r 0 s
*f
0
Ô /01
0
/ 1
ζ
El análisis de la superficie (3-57) debe cumplir la condición de transversalidad, es
decir, para que el conversor alcance el régimen de deslizamiento, es necesario
que el vector Ô no sea tangente al plano en toda la superficie, en ningún
punto de ella.
ʺ
è, ÄÌ ÊW
4
X, )* .Ì 4
(3-63)
Si ¹ 0 se cumple la condición de transversalidad para todo instante de tiempo.
Por otra parte, el control equivalente fØ se calcula de la ecuación (3-13) y
corresponde a:
aÓ *
&w 4# 7a $
(3-64)
Tomando en cuenta que el conversor de boost es un sistema conmutado, donde la
señal de control puede tomar valores entre [0, 1], se debe garantizar que el control
equivalente también esté acotado entre esos valores:
¿1*
& w 4# 7a $
¿1
(3-65)
Operando esta expresión y asumiendo que À 0 se deduce, que las condiciones
que debe cumplir el voltaje de salida, son:
a *
¿ ¿ a 7
4
&
Y
& 7a
4
À 4
(3-66)
83
À a * G8¯ ì
&
,
a 7&
í
¿ ¿
4 7 4
4
(3-67)
Analizando las dos desigualdades, se observa que con valores de ½ entre 0, ,
se logra una región de deslizamiento más amplia.
Una vez que el sistema ha alcanzado la superficie de deslizamiento, la dinámica
del sistema puede ser representado por la siguiente expresión, si no se tiene en
cuenta el ruido de conmutación:
%
%
# Ä$
(3-68)
Reemplazando las matrices y el control equivalente en (3-68), se obtiene:
* I î * a
k& 7 4#a 7 $lW #$7 îw8a X
(3-69)
(3-70)
Las ecuaciones (3-69) y (3-70) representan la dinámica ideal de deslizamiento que
condiciones (3-66) y (3-67). El punto de equilibrio #ïq , q $ de esta dinámica ideal
caracterizará al sistema, cuando se cumpla la condición de transversalidad y las
de deslizamiento, está dado por:
q a
(3-71)
#$
îð
(3-72)
Para poder implementar, si la dinámica ideal es estable, se precisará su
linealización alrededor del punto de equilibrio. La dinámica linealizada del sistema
(3-66) y (3-67) es:
∆ 2*
I
48a
a 3 ∆ *
Donde: ∆ * a
î∆ ∆
&
a î∆
(3-73)
(3-74)
84
Donde: ï∆ ï *
ñ #¶$
òD
Y el polinomio característico de (3-73) y (3-74) corresponde a:
! ¡
I
*
4a
I&
¢! &
a (3-75)
Donde ½ À 0, entonces para que la ecuación (3-75) cumpla el criterio de Hurwitz,
se considera que ½ ¿
BC
Bó
, por tanto si se satisface esta condición, se garantiza la
estabilidad del sistema, cuando se aplica la superficie (3-57).
3.9.2
PROTOTIPO DE LABORATORIO
En la figura 3.9 se presenta el esquema típico del control en modo deslizante,
aplicado a un conversor de potencia. En él se puede observar que las señales
que se requieren para construir la superficie, se extraen de la planta y se
acondicionan para que tengan valores permitidos por el resto del circuito.
La
superficie se pasa por un comparador con histéresis, para poder controlar al
conversor.
Variables de
estado
CONVERSOR
ACONDICIONAMIENTO
DE VARIABLES
Referencias
DRIVER DEL
CONMUTADOR
GENERACIÓN DE
VARIABLES
Comparador con
histéresis
u
Figura 3. 9: Esquema del control en modo deslizante
85
A continuación se detallan las características y la forma de implementación
experimental.
3.9.2.1 Etapa de potencia
Los parámetros de diseño del conversor de boost se describen en la tabla 3.1.
Tabla 0.1: Parámetros de diseño
PARÁMETRO
SÍMBOLO
VALOR
Voltaje de entrada
Vg
10V
Voltaje de salida
Vo
20V
Inductancia en la bobina
L
100Uh
Capacitancia del condensador
C
100Uf
Carga nominal
R
Corriente promedio en el inductor
(
10Ω
IL
4A
Corriente máxima en el inductor
Imáx
4.5 A
Corriente mínima en el inductor
Imín
3.5 A
Rizado
∆V
0.01%
Ciclo de trabajo
0.5
Existen tres señales útiles para el diseño del control y del reconstructor integral.
La primera es la señal de control u, la cual se encarga de la conmutación del
transistor, y se aplica a él a través del driver IR2110. Este driver proporcional al
Gate del transistor los niveles de corriente, para que pueda conmutar entre
saturación y corte.
La segunda señal es la salida del conversor (Vout), esta señal en estado
estacionario corresponde a 20V y para poder manipularla, en la implementación
del reconstructor, se atenúa utilizando un divisor de voltaje, la señal resultante es
Vout/10.
Por último, se tendrá en cuenta la señal de entrada del conversor,
designada por Vg.
86
Vdr
Vout
Vout/10
D1
R4
L1
1
0.025
R2
2
100uH
9k
Vg
DIODE
DRIVER
10V
R3
R1
M1
C1
U
1k
10
100u
IRF150
IR2110
Figura 3. 10: Conversor de Boost
3.9.2.2 Referencias
El control requiere una referencia de corriente para poder generar la señal de
error.
El circuito que provee esta referencia, se debe caracterizar por su
estabilidad, a pesar de las posibles perturbaciones en el sistema y por su bajo
consumo de energía. Por lo que se opta por la configuración de la figura 3.11,
este circuito es un estabilizador de voltaje,
utilizado para obtener referencias de
voltaje con bajo nivel de corriente a la salida. Para la implementación se utiliza un
amplificador operacional LM324.
Figura 3. 11: Esquema circuital de la referencia de corriente
87
El potenciómetro sirve para ajustar el valor de salida a Iref=4 [A]. En cuanto al valor
de Vdd es de 12V.
3.9.2.3 Factor integral del error
El factor integral del error se obtiene al restar la señal Vout/10 del voltaje de
referencia, en este caso corresponde a 2V. El restador se implementa con el
LM324, su ganancia es unitaria y el valor de referencia se observa en la figura
3.14. A continuación, se integra la salida del restador utilizando el LM324 en
configuración de integrador, a un nivel de saturación deseado. El esquema
circuital del restador y del integrador se ilusta en la figura 3.13.
Figura 3. 12: Factor integral del error
Figura 3. 13: Circuito que genera Vref
88
3.9.2.4 Reconstructor integral
Tiene la misma configuración que el explicado en el capítulo 2.
R7
10k
+12V
Vdr
+12V
U5A
OUT
R5
3
+
U6A
-
LM324
V-
1k
OUT
2
-
LM324
C3
-12V
540u
1
V-
10k
R13
1
11
2
4
+
11
3
10k
V+
R4
V+
4
V+
-12V
R12
R9
1k
50k
R6
10k
Figura 3. 14: Reconstructor integral
La corriente estimada y el factor integral del error deben sumarse, para poder
obtener la superficie de deslizamiento. En la figura (3-16) se observa el circuito
sumador; es de recordar que la integral del error tiene signo invertido, por este
motivo debe sumarse en el terminal negativo del operacional.
R3
+Vcc
R1
3
V+
REC
4
10k
+
U1A
10k
OUT
10k
Integral del error
-
LM324
11
2
V-
R2
Superf icie S(x)
1
-Vcc
R4
10k
«
Figura 3.15: Circuito sumador ζ y 89
3.9.2.5 Implementación de la superficie de deslizamiento
Para comparar la corriente de referencia con la corriente sensada, se utiliza el
circuito integrado LM311 en configuración de comparador con histéresis. Este
integrado se caracteriza por su rapidez de conmutación, así que es adecuado
para frecuencias de conmutación superiores a 100KHz.
La configuración del
circuito se encarga de comparar la superficie de deslizamiento con el valor de
referencia de la corriente (4 A).
El ancho de la histéresis se ajusta con el potenciómetro de 10kΩ y la señal de
salida se limita entre 0 y 12V (cuando Vcc=15V). Esta señal está dentro del rango
permitido por el driver IR2110, encargado de polarizar al transistor del conversor.
Figura 3. 16: Comparador con histéresis
90
4 CAPÍTULO IV
ANÁLISIS DE LA VIALIDAD DEL USO DEL CONTROL
BASADO EN PASIVIDAD
4.1 INTRODUCCIÓN
El control basado en pasividad se fundamenta en conceptos de energía y consiste
en encontrar, para un sistema dinámico, una relación donde la planta almacene
menos energía que la que absorbe, a través de su interconexión con el
controlador.
En este capítulo se revisa la definición de la pasividad y su aplicación al control de
conversores DC/DC.
De manera particular se aplica el control basado en
pasividad al conversor de Boost.
4.2 PASIVIDAD [9]
Antes de revisar la noción de pasividad, se puede
analizar este concepto
mediante algunos ejemplos de teoría de circuitos. Dado que la potencia es la
variación de la energía por unidad de tiempo, se tiene la siguiente expresión:
]#
$ %ô#
$
%
Donde õ#$ es la energía, Û#$ es la potencia y es el tiempo. Es decir:
(4-1)
91
ô#
$ " ]#
$%
(4-2)
Sea un circuito resistivo con dos terminales como se indica en la figura 4.1, donde
el voltaje de entrada es y la corriente que fluye a través de los terminales es R.
Si se asume que la relación entre e R es -. R, donde - es la resistencia del
circuito. El circuito se define como elemento pasivo si . R À 0, entonces la energía
que absorbe el circuito es positiva. Si . R ¿ 0 entonces el dispositivo entrega
energía y se dice que el dispositivo es activo.
y
+
R
u
-
Figura 4.1: Circuito Resistivo
La aplicación del concepto de pasividad implica la existencia de tres funciones de
energía: la función de almacenamiento (que representa la energía almacenada en
el sistema), una función de suministro (que es la energía externa recibida por el
sistema) y una función de disipación (que representa la energía total disipada por
el sistema en algún intervalo de tiempo).
Una definición, extendida al ámbito de los sistemas dinámicos, también se puede
conseguir a través de una visión eléctrica, al considerar un sistema no lineal (4-3)
92
;#$ &#$
P ö#$
(4-3)
Donde N: - L - ÷ É - L es continua, N: - L - ÷ É - ÷ es continua, N#0$ 0 y
ø#0$ 0; es la entrada de voltaje e R la salida de corriente como se representa
en la figura 4.2.
y
N# $ ¸#$
R ø#$
+
u
-
Figura 4.2: Visión circuital del sistema
Entonces (4-3) es pasivo si existe una función #$ semidefinida positiva,
diferenciable y continua, denominada función de almacenamiento, tal que:
" #$ P#$% ù 5#
$6 * ##$$
ú
ù (4-4)
Es decir, un sistema se denomina como pasivo si la potencia que suministra la
fuente es siempre mayor que el incremento de energía almacenada en el sistema,
donde la potencia es . R. Si esta condición se cumple para todo , entonces
también se cumple la siguiente desigualdad.
#
$P#
$ ù ##
$, #
$$
(4-5)
93
A continuación, se indica estos conceptos en dos ejemplos:
Ejemplo 4.1:
Sea el circuito RC que se indica en la figura 4.3 la potencia
suministrada por la fuente siempre será mayor que la energía almacenada en el
circuito, cuando las condiciones iniciales son nulas.
\#$
y
+
C
+
u
V(t)
R
R
Y\ \
Y -
Figura 4.3: Circuito RC
Es decir,
" #$ P#$% ù 5#
$6 * ##$$
(4-6)
Donde la variable #$ \#$ es el voltaje en el condensador. Evaluando la
expresión (4-6) se obtiene:
" % %
I
% ù "
%
%
% #
$
*
#$
[ #
$
(4-7)
Si la condición inicial #0$ 0, se tiene:
" % %
I
% ù "
%
%
% #
$
(4-8)
94
La función de almacenamiento de energía es 5 #$6 û ¬ #U$
.
Ejemplo 4.2: En un circuito RLC de la figura 4.4 la corriente que fluye por el
inductor es y el voltaje del condensador es la variable de estado .
corriente total de salida de la fuente es R.
La
Figura 4.4: Circuito RLC
Las ecuaciones de estado se pueden escribir como:
4 * ö . * * öV. (4-9)
P ö . Donde ø 1- , ø - y øü 1- .
ü
La función de almacenamiento es:
#$ 4 (4-10)
95
Si se deriva a ambos lados, se obtiene:
, W * ø . * X * W * øü . X
W * ø . X * . øü . W ö #$X * ö #$ * ö # $ * öV # $
P * ö #$ * ö # $ * öV (4-11)
Donde:
P ö #$ ö # $ öV ù ý
(4-12)
El término R es la potencia entregada por el circuito y los términos
ø # $ ø # $ øü representan la potencia absorbida en los resistores. La
suma de estos tres términos es positiva por lo tanto R ù ý, lo cual implica que el
circuito RLC es pasivo.
Definición: Sea un sistema representado por:
;#, $
P ö#, $
(4-13)
Donde N: - L É - L es localmente Lipschtiz N#0,0$ 0 y ø es continua ø#0,0$ 0,
se denomina pasivo, si existe una función definida positiva simétrica (llamada
función de almacenamiento) tal que:
96
P ù þ
þ
;#, $
(4-14)
Además:
El sistema es sin pérdidas si ¾ R .
El sistema es estrictamente pasivo respecto a la entrada, si ¾ R ù ¾ #$,
para alguna función , donde ¾ #$ ù 0, ú ¹ 0.
El sistema es estrictamente pasivo respecto a la salida, si ¾ R ù R ¾ #R$, para
alguna función , donde R ¾ #R$ ù 0, úR ¹ 0.
El sistema es estrictamente pasivo respecto al estado, si ¾ R ù #$, para
alguna función , definida positiva.
De manera más estricta, se puede estudiar las características que presenta esta
clase de sistemas.
A continuación, se esquematizan las condiciones bajo las
cuales la pasividad implica la estabilidad de un sistema.
Definición: Sea sistema (4-13), se dice que es de estado cero observable si
ninguna solución de N#, 0$ permanece en:
o= I¯ |ö#. $ p
(4-15)
Excepto la solución trivial #$ 0.
TEOREMA 4.1: Si el sistema es pasivo con una función de almacenamiento ,
entonces el origen de N#, 0$ es estable.
97
TEOREMA 4.2: Sea el sistema (4-13), donde N es localmente Lipschitz2 N #0,0$ 0
y ø es continua ø#0,0$ 0. Si este sistema es estrictamente pasivo respecto a la
salida con ¾ R ù (R ¾ R, ( À 0, entonces es de ganancia finita , estable con
una ganancia menor o igual a 1( .
TEOREMA 4.3: El origen de N#, 0$ es asintóticamente estable, si el sistema
es estrictamente pasivo al estado o estrictamente pasivo respecto a la salida y de
estado cero observable.
En esta sección se resumen los conceptos básicos de los dispositivos pasivos y
las características de estabilidad que tienen este tipo de sistemas, mediante la
aplicación de los teoremas citados. A continuación, se explica cuál es el método
para utilizar la pasividad y el concepto de estado cero observable en el diseño de
lazos de control.
4.3 CONTROL BASADO EN PASIVIDAD
Sea un sistema (4-13), con una función de almacenamiento tal que:
%
%
P
(4-16)
Si este sistema no es estrictamente pasivo con respecto a la salida, se puede usar
una realimentación que haga esto. Considerando la realimentación:
2
En matemática, una función f : M → N entre espacios métricos M y N es llamada Lipschitz continua (o se
dice que satisface una condición de Lipschitz) si existe una constante K > 0 tal que d(f(x), f(y)) ≤ K d(x, y)
para todo x y y en M. En tal caso, K es llamada la constante Lipschitz de la función. El nombre viene del
matemático alemán Rudolf Lipschitz.
98
*²P [
(4-17)
Donde À 0 y donde \ - L es una nueva entrada. Entonces el sistema en lazo
cerrado satisface:
%
%
[P * ²P
(4-18)
Lo cual es estrictamente pasivo con respecto a la salida. Si este sistema es
también de estado cero observable, entonces se puede usar el Teorema 4.3 para
deducir la estabilidad asintótica del sistema.
4.4 APLICACIÓN
DEL
CONTROL
POR
PASIVIDAD
AL
CONVERSOR BOOST [4]
Figura 4.5: Conversor Boost
La figura 4.5 muestra un conversor de Boost cuyo comportamiento durante y
se puede expresar como:
para para (4-19)
(4-20)
99
Z
Siendo 2 3 el vector de estado, y:
\
ß
* ß r *
à
Ùà
*
Ùà
s
(4-21)
La ecuación (4-24) se puede expresar de una forma más compacta como:
# * $ # $# * $
(4-22)
Esto es equivalente a:
# * $ # * $
Donde 1 cuando y 0 durante .
(4-23)
En el conversor de Boost , lo que simplifica la expresión (4-23) a:
# * $%
(4-24)
El modelo puede ser aproximado por un modelo continuo, donde la variable Y está
acotada en el intervalo W0, 1X. Considerando que las variables de estado tienen
dos componentes:
b#
$
#
$ `a d #
$
%#
$ ca %
(4-25)
100
Donde ef y gf representan los valores en equilibrio y, h#$ y Yi #$ los valores
incrementales de las variables de estado y el ciclo de trabajo, respectivamente.
Por tanto la ecuación (4-24) puede ser escrita por:
d$
£ # * $ #`a $
£#ca %
5`a b6 #`a $
(4-26)
Esta expresión se puede simplificar de la siguiente forma:
d %
d
b b%
(4-27)
Donde:
# * $gf
# * $
# * $ef
Y las matrices , y están dadas por:
0
ró
á
*
ó
* âá
s
r
0
*á
s
0
y
/
ûó
Kó 1
*á
Donde gf 1 * gf .
La dinámica incremental se resume entonces en las siguientes ecuaciones:
4
%
d [a %
d
b[
b%
*ca [
%
I
%̃
b
%[
d * 8a %
d
b * ̃%
ca 8 * [
(4-28)
(4-29)
101
Si se considera la dinámica incremental del sistema (4-28) y (4-29) con una
función de almacenamiento de la forma:
b$ 4
#
̌
b
[
(4-30)
O de manera genérica se puede expresar como:
b$ b b
#
(4-31)
Donde Q se define positiva:
4
2
3
(4-32)
Al evaluar la derivada de #h $ se obtiene:
%
%
%
%
b$ k
b b bl
#
(4-33)
d
b W
b # $
b b$ b# $
bX%
#
(4-34)
Por lo tanto:
%
%
b$ *
#
b
[
I
d
b [qa ̃$%
#*8qa [
(4-35)
102
Si se toma como señal de salida:
b # $
b bX
P W
(4-36)
Es decir:
b [qa ̃ * 8qa [
b
P
(4-37)
Se demuestra la pasividad de la relación entrada-salida, dado que:
%
%
b$ *
#
b
[
I
dP
d
b%
b%
P
(4-38)
RhYi, en todo instante de tiempo, es mayor o igual que el incremento de la energía
Por lo tanto, con la salida (4-37) se cumple que la potencia suministrada a la red
almacenada
S
SU
#h$ en ese instante.
Con la nueva salida (4-37) se puede concluir leyes de control de la forma:
d *P
b
%
Donde es un escalar positivo.
(4-39)
Considerando esta entrada de control y la
desigualdad (4-38) se obtiene que:
%
%
b$ *P
#Q
(4-40)
103
Obsérvese que la ley de control es:
d *#[a q ̃ * 8a q [
b$
%
(4-41)
#$ es definida positiva y su derivada # $ 0.
Así la expresión (4-40) muestra la estabilidad del sistema en lazo cerrado, porque
Teniendo en cuenta el hecho de que el ciclo de trabajo Y está restringido entre los
valores 0 y 1, es decir 0 ¿ Y ¿ 1, se establecen los límites de saturación al ciclo de
trabajo incremental Yi.
Es decir, dicho ciclo de trabajo incremental estará acotado por:
d¿1
¿ ca %
(4-42)
Por lo que Yi estará entre un valor máximo YiJ y un valor mínimo YiJKL de la
siguiente forma:
dG8¯ ¿ %
d¿%
dGQ
%
(4-43)
Siendo YiJKL *gf y YiJ 1 * gf .
Gráficamente se puede representar de la siguiente forma:
Yi *R
104
YiJ
Rh \fq ̃ * Zfq \h
YiJKL
Figura 4.6: Niveles de saturación del ciclo de trabajo
Puesto que Zf y \f son términos constantes y las variables ̃ y \h son variables
medibles, entonces la saturación del ciclo de trabajo solo afectará a la función .
Para entender mejor el comportamiento de , se representa en la figura 4.7, su
evolución respecto a Rh. De esta gráfica se concluye que no es necesariamente
ciclo de trabajo incremental Yi se satura. Gracias a este análisis, se demuestra,
una función constante, porque se convierte en una función no lineal cuando el
que a pesar de la saturación del ciclo de trabajo, la salida retorna a su estado
estacionario debido al efecto decreciente que tiene .
J
YiJKL
J
YiJ
J
b
Figura 4.7: Variación de versus P
Rh
105
Para escoger el valor máximo de se realiza el estudio en pequeña escala de la
Yi *#\f q ̃ * Zf q \h $ , la correspondiente ganancia de lazo viene dado por:
ganancia
de
lazo
cerrado.
Puesto
que
la
ley
de
control
#!$ *GQ [a %d#!$ * 8a %d#!$
b#!$
[
̃#!$
Donde
es:
̃#A$
S¤ #A$
y
ûh#A$
S¤ #A$
#!$ *GQ
es
(4-44)
se obtiene del modelo linealizado de (4-28) y (4-29), el resultado
!I[a w[a w!I48a
! I4w4qI#7ca $
(4-45)
La figura 4.8 muestra el lugar geométrico de las raíces para valores de J entre
6x10-4 y 4x10-3, cuando se considera un conversor de Boost con: , 100WX,
100W X, - 10WX, 0 10WX y gf 0.5. Los puntos de equilibrio son:
Zf 4WX y \f 20WX.
Root Locus
8000
6000
4000
Imaginary Axis
2000
0
-2000
-4000
-6000
-8000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
Real Axis
Figura 4.8: Lugar geométrico para la ganancia de lazo (4-44)
En la figura 4-9 se observa la evolución de la señal de salida
J 3 ± 107ü .
cuando
106
Figura 4.9: Respuesta del sistema aplicando la ley de control (4-41)
Se debe tener en cuenta, que para poder implementar la ley de control, es
necesario conocer los puntos de equilibrio del conversor conmutado, es decir
implícitamente conocer los valores de 0 y -. En el caso de que estos valores no
se conozcan con exactitud, la salida del sistema realimentado presentará error en
estado estacionario.
107
5 CAPÍTULO V
ANÁLISIS DE LA VIALIDAD DEL CONTROL POR
LINEALIZACIÓN ENTRADA-SALIDA POR
REALIMENTACIÓN
5.1
INTRODUCCIÓN
La linealización entrada-salida es una técnica, por medio de la cual, se puede
obtener relaciones entrada-salida lineales de sistemas no lineales, a través de la
realimentación no lineal del estado, lo que implica un modelo exacto, en oposición
al modelo aproximado de linealización por medio de las series de Taylor. Esta
linealización que se obtiene realimentando los estados,
cancela las no
linealidades suaves de la planta, con lo que se genera una relación lineal entre la
salida y una nueva excitación \. Una vez que se tiene una relación lineal, se
aplica un control lineal que permite obtener la dinámica lineal estable deseada.
En este capítulo se presentan los conceptos generales de linealización por
realimentación.
Posteriormente, se analizan diferentes formas de aplicar esta
técnica en el conversor de Boost, considerando como salida: a) El voltaje en el
condensador, b) la corriente en el inductor.
5.2 LINEALIZACIÓN ENTRADA-SALIDA [1]
El desarrollo de conceptos de geometría no lineal, junto al grado relativo y la
dinámica cero, han permitido ampliar el análisis de los sistemas no lineales. El
grado relativo es el número de veces que la salida R#$ necesita ser derivada para
108
que la entrada #$ aparezca. En el caso de un sistema lineal, para una función
de transferencia dada es la diferencia entre el número de polos y ceros.
Sea el sistema dado por:
;#$&#$
P ö#$
(5-1)
Donde es el vector de estado y tiene dimensiones Ü1, es la entrada escalar e
R es la salida escalar del sistema. Las funciones N y ¸ son campos vectoriales de
- L É - L ; y ø es un campo vectorial #- L É -$. Se dice entonces que el sistema
(5-1)
tiene un grado relativo , si en la * énZ derivada de la salida aparece
el término #$.
Si se deriva la salida con respecto al tiempo se tiene:
P þö
þ
Ëö#;#$ &#$$
(5-2)
Donde Íø denota el gradiente de la función ø. Teniendo en cuenta que la notación
de la derivada de un campo vectorial N, es una función escalar denotada por:
Íø · N ,E ø, la primera derivada de la salida del sistema con esta notación, será:
P 4; ö#$ 4& ö#$
(5-3)
4; ö#$ 4& 4; ö#$
P
(5-4)
4; ö#$ 4& 4;
(5-5)
Si se continúa derivando, la segunda derivada denotada por Rý se obtiene que:
Y repitiendo este proceso hasta la * énZ derivada:
P#
$
7
ö#$
109
Donde ,E ø#$ corresponde a ,E ,E !7 ø#$. Nótese que solo se presentará
!
cuando el producto ,0 ,E !7 ø#$ ¹ 0. Así para un sistema con grado relativo , el
conjunto de derivadas corresponde a:
R ,E ø#$
Rý ,E ø#$
R #K$ ,KE ø#$
P#
$
4; ö#$ 4& 4;
7
ö#$
(5-6)
Cuando el sistema (5-1) tiene grado relativo , su linealización entrada-salida se
alcanza con la realimentación:
4& 4;
v
ö#$
2*4; ö#$ [3
(5-7)
Y se tiene una ecuación diferencial lineal entre la salida R y la nueva excitación \
de la forma:
P#
$
[
(5-8)
Por lo tanto, la técnica de linealización entrada-salida pretende utilizar
controladores no lineales en plantas no lineales, intentando obtener una respuesta
lineal del conjunto planta-controlador.
Ahora el problema se concentra en diseñar un controlador para la relación (5-8)
utilizando técnicas lineales. Cuando el grado relativo es definido y Ü, se
puede tomar R, R , … , R #!7$ como un nuevo conjunto de variables de estado, es
decir:
´ k´ ´ … ´ l kP P … P#
l
7$ (5-9)
110
Derivando (5-9) se tiene:
z2
z
3
z& = M
z ρ
v
(5-10)
La salida ahora está definida como R " y \ como nueva entrada de control.
Por otra parte, la dinámica cero es el componente interno del sistema, cuando las
condiciones iniciales y la acción de control restrieguen las trayectorias de estado,
para que R se mantenga a cero. Supóngase que el grado relativo en el sistema
(5-1) es Ü. Se define #, un subconjunto con dimensión Ü * , como:
$ ì %: ö#$ , … , 4;
7
ö#$ í
(5-11)
Se llama dinámica cero a la dinámica del sistema (5-1) restringida a # .
Para utilizar con éxito la técnica de linealización entrada-salida se requiere que la
dinámica cero del sistema sea estable, esta dinámica existe siempre y cuando el
grado relativo sea inferior al grado del sistema. Los sistemas con grado cero
inestables, sistemas de fase no mínima, son más difíciles de controlar que los
sistemas de fase mínima en los cuales la dinámica cero es asintóticamente
estable.
5.3 APLICACIÓN DE LA LINEALIZACIÓN ENTRADA-SALIDA AL
CONVERSOR BOOST [2]
Se analiza la técnica de linealización entrada-salida cuando el sistema es un
conversor de Boost y su salida es el voltaje en el capacitor.
111
Figura 5.1: Conversor de Boost
El modelo que se utiliza para el análisis procede del modelo incremental del
conversor de Boost, es decir:
dm j# * $
dm
b j# * # * $ca $
b 5# * $`a # * $6%
b%
Donde:
ß
*
0
A r *
(
Ùà
*
'
s
)(
(5-12)
B ' 0
+,
Y el punto de equilibrio:
`a &
Icr &a s
c-a
8q
2 q3
[
(5-13)
112
Siendo gf 1 * gf , donde gf es el ciclo de trabajo en estado estacionario.
Si se desarrolla (5-13) se puede obtener una expresión análoga a (5-1) donde N, ¸
y ø tienen la siguiente forma:
N #h $ # # * $gf $h
¸#h $ # * $e # * $ # * $h
Y se considera que la salida es R \h ø #$
Como resultado de este desarrollo, la dinámica del conversor se puede escribir
como:
b
* 4 ca [
b$
#[q [
4
b r Ic- ̃7[b s r s
a
* #8q ̃$
b
P[
I
(5-14)
(5-15)
Para determinar el grado relativo del sistema (5-14), (5-15) se deriva
sucesivamente hasta que su expresión dependa de . La primera derivada
corresponde a:
P % W;#$ &#$X 4; ö#$ 4& ö#$
%ö
(5-16)
113
Evaluando cada uno de los términos se obtiene:
4; ö#$ Ê% , ;#$Ì W
%ö
4& ö#$ Ê
%ö
%
b
* c [
b
Ic- ̃7[
4
X r Ic- ̃7[b s I
, &#$Ì W X r
(5-17)
I
4
b$
#[q [
* #8q ̃$
s * #8q ̃$
(5-18)
Se observa que (5-18) es diferente de cero, por lo tanto R depende de . Se
deduce entonces que el grado relativo del sistema es 1.
Para encontrar el control por realimentación de estado, que linealiza el modelo del
sistema, se debe calcular la siguiente expresión: 1. Dando como resultado:
b
Ic-a ̃7[
I#8q w̃$
*
[
#8q w̃$
/vñ
C . 0#$
k*,E ø# $ \l con
!
(5-19)
Reemplazando el valor de en el sistema de lazo cerrado (5-14) se obtiene que:
Ica [
¡ ̃ ¢
b
[
- q ̃ 75I8q c w[q 6[
b7[
b 7I#[q w[
b$[
á
q
I4#8 w̃$
[
(5-20)
114
Si se realiza una realimentación lineal de la forma \ *\h con constante
positiva y además, se considera que la salida R \h tiende a cero, la dinámica cero
se escribe como:
̃ 4#8aqw̃$
c- [q ̃
(5-21)
Esta dinámica es inestable alrededor del punto de equilibrio #̃, \h $ #0,0$, dado
que la corriente en el inductor es siempre positiva, es decir
#Z q ̃$ À 0.
Entonces, el voltaje de salida del conversor de Boost es una variable de fase no
mínima y por tanto no puede ser estabilizado mediante esta estrategia de
linealización entrada-salida.
5.4 APLICACIÓN DE LA LIENALIZACIÓN ENTRADA-SALIDA AL
CONVERSOR DE BOOST CUANDO LA SALIDA ES LA
CORRIENTE EN EL INDUCTOR
Otra alternativa para linealizar la dinámica del conversor de Boost es escoger
como salida la corriente incremental R ̃. Para comprobar que es viable esta
opción, se calcula primero el grado relativo de la dinámica (5-14). Si se desarrolla
la primera derivada de R ̃, se puede observar que depende de la variable , por
lo tanto el grado relativo es 1.
P 4; ö#$ 4& ö#$ *
b
cá [
4
b
[q w[
4
(5-22)
A partir de esta expresión se obtiene el control realimentado que linealiza el
modelo del conversor:
115
b
c-a [
b
[q w[
[4
b
[q w[
(5-23)
Si se realiza una realimentación lineal \ *̃, el control realimentado toma la
forma:
*²̃
¡ ̃ ¢ /I4²̃ w̃5²4IwI[qc-a 67[b#8qIc-a w[bw[q$1
b
[
b$
I#[q w[
(5-24)
Si la corriente de salida incremental se hace cero, es decir ̃ 0, se obtiene que la
dinámica cero es:
*[
h #8 Ica [h [ $
b [
q
q
I#[ [
h$
q
(5-25)
Se reemplaza el valor del voltaje de salida en estado estacionario Z q -gf \ q y la
expresión anterior se simplifica a:
b#[
bw[ $
7[
b [
q b
q
I#[ w[$
(5-26)
Se puede reemplazar el valor del voltaje en estado estacionario Z q -gf \ y se
simplifica la expresión anterior a:
b#[
bw[ $
7[
b [
- b
q
I#[ w[$
(5-27)
116
considera la función de Lyapunov #\h $ de la forma:
Es necesario demostrar la estabilidad de la dinámica (5-27), para hacerlo se
b$ µ#[
b
[
(5-28)
La derivada de esta expresión es:
b$ [
b[
b
µ#[
(5-29)
b$ µ#[
(5-30)
Reemplazando (5-28) se obtiene:
*[
h #[h [q $
I#[q [
h$
Se puede observar que el término de la derecha es negativo siempre que el voltaje
en el condensador sea positivo, es decir, cuando \h À *\ q . Por tanto, la dinámica
cero es de fase mínima y estable en dominio \h À *\ q .
A continuación, se presentan los resultados de simulación en SIMULINK
del
conversor de Boost cuando se aplica la ley de control (5-23). Los parámetros del
conversor son: , 100WX, 100W X, - 10WX, 0 10WX y gf 0.5.
Figura 5.2: Control por linealización entrada-salida
117
Figura 5.3: Corriente en la inductancia
Figura 5.4: Voltaje en el capacitor
Se debe tener en cuenta que la ley de control (5-23)
(5 23) incluye el valor en estado
estacionario de la señal ciclo de trabajo denotado por
variación en el parámetro
, por lo tanto cualquier
va a causar error en estado estacionario.
118
6 CAPÍTULO VI
PRUEBAS Y ANÁLISIS DE RESULTADOS
Para evaluar el correcto funcionamiento del cirucito, se realiza la comparación de
la corriente
de sensado
con la corriente real,
utilizando una resistencia de
sensado. Se puede observar que el reconstructor y la corriente sensada tienen la
misma forma de onda.
Figura 6. 1: Corriente reconstruida
En la figura 6.2 se puede observar la corriente real del inductor:
Figura 6.2: Corriente real en el inductor
119
El nivel promedio del voltaje de salida es 20 V, como se indica en la figura 6.3.
Figura 6.3: Voltaje de salida
La frecuencia de conmutación es aproximadamente 50 kHz. En la figura 6.3 se
puede observar la señal de control, que corresponde a la salida del comparador
con histéresis. En la figura 6.4, se indica el diagrama del circuito completo.
Figura 6. 4: Señal de control
120
Adicionalmente, se realizaron pruebas con diferentes tipos de cargas, en los
cuales se puede observar que el voltaje a la salida puede ser ajustado al voltaje de
20V. A continuación, se presentan las formas de onda obtenidas tanto para cargas
resistivas
lineales
como
para
una
carga
resistiva
incandescente).
RESISTENCIA LINEAL (R=100Ω)
Figura 6.5: Voltaje en la carga 20.9V
Figura 6.6: Corriente reconstruida
no
lineal
(lámpara
121
Figura 6.7: Corriente real en el inductor
Podemos observar que la corriente real en el inductor es similar a la corriente
obtenida mediante la reconstrucción integral.
CARGA NO LINEAL (LÁMPARA INCANDESCENTE)
Para una carga no lineal, se obtuvieron las siguientes formas de onda:
Figura 6.7: Voltaje en la carga no lineal 20.1V
122
Figura 6.8: Corriente reconstruida
Figura 6.9: Corriente real en el inductor
123
En las pruebas realizadas se puede observar que el voltaje a la salida se puede
ajustar a los niveles deseados, de igual manera, la corriente reconstruida es
similar a la corriente real en el inductor.
124
7 CAPÍTULO VII
CONCLUSIONES Y RECOMENDACIONES
7.1 CONCLUSIONES
•
Se
analiza la técnica del reconstructor integral y se realizan pruebas
experimentales para comprobar que es viable su utilización en la estimación
de la corriente, en dispositivos como el conversor de Boost. Es de enfatizar
que esta técnica es aplicable sólo en aquellos sistemas que sean
observables, por este motivo se debe comprobar antes de proceder al
análisis.
•
De acuerdo a la figura 6.1 y 6.2, se puede comprobar que la utilización de
los reconstructores integrales, como herramienta para el control de
conversores de potencia, es muy útil porque puede evitar el uso de
dispositivos de sensado de corriente. La señal que se estima, al usar el
reconstructor integral, se genera con la señal de control y el voltaje en la
salida del conversor.
El aporte principal se centra en el análisis de la
superficie de corriente, que incluye el reconstructor integral, como
alternativa para evitar el uso de sensores de corriente.
•
La técnica de control en modo de deslizamiento, se aplica al control del
conversor de Boost y permite regular de manera indirecta el voltaje de
salida, pudiéndose ajustar al voltaje nominal de 20V para diferentes tipos de
cargas. Se analiza la superficie: corriente en el inductor igual a constante y
se adiciona un factor integral para eliminar el error en estado estacionario.
125
•
Se puede comprobar que el sistema regula el voltaje de salida tanto para
cargas resistivas lineales como para cargas resistivas no lineales (lámpara
incandescente).
•
La implementación de esta técnica sin PWM, determina que el diseño de
elementos RC puede llegar a complicarse, porque el sistema realimentado
tiene frecuencia de conmutación variable y su valor depende del ancho de
histéresis.
•
Para el diseño de las leyes de control, basadas en la pasividad, como
alternativa para controlar los conversores DC/DC, se tuvo en cuenta
conceptos de energía, con el objeto de buscar una relación entrada-salida
del tipo pasivo.
•
El control mediante la linealización entrada-salida se obtiene a partir del
concepto de grado relativo y genera una dinámica realimentada lineal
desde el punto de vista entrada-salida. Además, el estudio de la dinámica
cero permite determinar la estabilidad del sistema en lazo cerrado, ya que
describe el comportamiento interno cuando las condiciones iniciales y la
acción de control restringen las trayectorias de estado, para que la salida se
mantenga cero. Si la dinámica de ceros es inestable, el control propuesto
no puede aplicarse, debido a que internamente en cierto número de
estados, estaría creciendo ilimitadamente y no habría manera de que el
control pueda solucionarlo.
7.2 RECOMENDACIONES
•
Este trabajo se ha centrado en la aplicación de técnicas no lineales al
conversor de Boost, por ello se recomienda una futura investigación
126
para extender la aplicación del reconstructor integral a otros
conversores de orden elevado.
•
Se recomienda estudiar la operación del lazo de control, cuando el
conversor trabaja en modo de conducción discontinua y a partir de esto,
buscar alternativas para evitar que el control se sature.
•
Se ha experimentado el control en modo de deslizamiento, por lo que se
propone un proceso experimental del control por pasividad y el control
por realimentación entrada-salida y su extensión al uso del reconstructor
integral.
127
REFERENCIAS BIBLIOGRÁFICAS
[1] RASHID, Muhammad. Electrónica de Potencia. México : Pearson Educación, 2004. Tercera
Edición.
[2] BERENGUEL, Manolo. Aplicaciones de Control
http://www.esi2.us.es/RIC/JSevilla04/JSevilla04_07.pdf. [En línea]
de
Sistemas
No-lineales.
[3] MOHAN, Ned, UNDELAND, Tore y ROBBINS, William. Power Electronics: Converters,
Aplications and Design. s.l. : John Wiley & Sons, 1989.
[4] ANÓNIMO. Metodología de diseño en base a Pasividad para convertidores de potencia de DCDC. http://www.tdr.cesca.es/TESIS_UPC/AVAILABLE/TDX-0404106-194156/06Mge06de09. [En
línea]
[5] OGATA, Katsuhiko. Ingeniería de Control Moderno. México : Prentice Hall, 1997.
[6] ARTEAGA, M. I., LEYVA, R. y MARTÍNEZ-SALAMERO, L. Using Integral
Reconstructor for Non-Linear Controller Boost Converter. Universitat Rovira i Virgili : s.n.
http://www.tesisenxarxa.net/TDX/TDX_UPC/TESIS/AVAILABLE/TDX-0321107122918//01MIao01de01.pdf
[7] GODOY, Jesús. Implementación del control en modo deslizante de un convertidor "BuckBoost" de potencia DC-DC usando reconstructores integrales.
[8] ARTEAGA, M. I., LEYVA, R. Análisis y simulación de superficies en modo deslizamiento
aplicadas
al
convertidor
de
Boost
http://www.tesisenxarxa.net/TDX/TDX_UPC/TESIS/AVAILABLE/TDX-0321107122918//01MIao01de01.pdf
[9] ARTEAGA, M. I., LEYVA, R. y MARTÍNEZ-SALAMERO, L. Control Basado en
Pasividad de convertidores de potencia CC/CC usando reconstructores integrales.
http://www.tesisenxarxa.net/TDX/TDX_UPC/TESIS/AVAILABLE/TDX-0321107122918//01MIao01de01.pdf
128
A N E X O S
129
ANEXO A
MANUAL DE USUARIO
El prototipo de la figura A.1 es un conversor DC/DC elevador (Boost) controlado
aplicando la técnica de deslizamiento.
El prototipo consta de cuatro partes:
a) Señales de entrada
b) Señales de salida
c) Señales de control
A. 1. SEÑALES DE ENTRADA
Para iniciar el funcionamiento se debe alimentar el módulo con 110V de alterna de la
red eléctrica en las entradas Fase- Neutro (F-N), con lo que se consiguen los +12V y 12V de corriente directa para la polarización de los dispositivos electrónicos. Una vez
alimentado, se procede a encender el módulo con el switch que está en la parte lateral
del módulo.
130
Por protección, el módulo consta con un fusible a la entrada del mismo.
En las dos siguientes entradas, se coloca la alimentación de voltaje 10VDC,
tomando en cuenta la polaridad correcta, rojo para positivo y negro para el
negativo de la fuente de DC.
A. 2. SEÑALES DE SALIDA
En la parte frontal derecha, se encuentran las salidas: en las dos primeras
terminales se coloca la carga resistiva, que puede ser variable. En las salidas
posteriores, se obtiene las señales de corriente real y reconstruida, con un punto
común (neutro). Las señales de corriente (real y reconstruida) y el voltaje en la
carga, se pueden observar utilizando un osciloscopio.
A.3. SEÑALES DE CONTROL
En la parte lateral, se hallan tres potenciómetros. Los potenciómetros laterales
permite realizar el control del la corriente y voltaje de referencia. El potenciómetro
del medio regula la ganancia de la corriente real, para tener una mejor
visualización de la corriente en el inductor del conversor elevador.
131
132
ANEXO B
CIRCUITO IMPLEMENTADO
133
Figura B-1: Diagrama del circuito implementado
134
Figura B.2: Diagrama de la placa implementada
135
ANEXO C
HOJAS TÉCNICAS
136
ANEXO D
VARIOS