Modelación Matemática de Sistemas Dinámicos
Anuncio

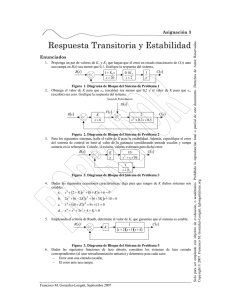
Modelación Matemática de Sistemas Dinámicos Introducción 1. Simplifique el diagrama de bloques que aparece en la Figura 1 y obtenga la función de transferencia en lazo cerrado C(s)/R(s). En todo caso, llegue hasta la expresión más simple en términos de las funciones de transferencias individuales (G1, G2, G3, G4). R(s ) G1 + − + + C (s ) G2 + − G3 G4 2. Figura 1. Diagrama de Bloque de un sistema Simplifique el diagrama de bloques que aparece en la Figura 2 y obtenga la función de transferencia en lazo cerrado C(s)/R(s). En todo caso, llegue hasta la expresión más simple en términos de las funciones de transferencias individuales (G1, G2, H1, H2). G1 R(s ) + − + + + + − G2 H1 H2 Figura 2. Diagrama de Bloque de un sistema Francisco M. González-Longatt, Septiembre 2007 C (s ) Solo para ser empleado con objetivo de evaluación, o académicos. Prohibido la reproducción total o parcial de este documento. Derechos de Autor Reservados. Copyright © 2007. Francisco M. Gonzalez-Longatt. fglongatt@ieee.org Asignación 1 2 Modelación Matematica de Sistemas Dinamicos Solo para ser empleado con objetivo de evaluación, o académicos. Prohibido la reproducción total o parcial de este documento. Derechos de Autor Reservados. Copyright © 2007. Francisco M. Gonzalez-Longatt. fglongatt@ieee.org 3. Simplifique el diagrama de bloques que aparece en la Figura 3 y obtenga la función de transferencia en lazo cerrado C(s)/R(s). En todo caso, llegue hasta la expresión más simple en términos de las funciones de transferencias individuales (G1, G2, G3, H1, H2, H3). H1 R(s ) + − G1 + − + G2 − + + G3 C (s ) H2 H3 4. 5. Figura 3. Diagrama de Bloque de un sistema Obtenga una representación en el espacio de estados del sistema de la Figura 4. R(s ) C (s ) s+z 1 + 2 − s+ p s Figura 4. Diagrama de Bloque de un sistema Obtenga una representación en el espacio de estados del sistema de la Figura 5. R(s ) C (s ) s + z1 1 + n − s + p1 s s + z2 s + p2 6. Figura 5. Diagrama de Bloque de un sistema Obtenga una representación en el espacio de estados del sistema de la Figura 6. R(s ) C (s ) s + z1 + − s + p1 1 s + p2 Figura 6. Diagrama de Bloque de un sistema Considere el sistema descrito mediante la ecuación diferencial: &y&& + 3 &y& + 2 y& = u . Obtenga la representación en el espacio de estado del sistema. 8. Considere el sistema descrito mediante la ecuación diferencial: 8&y&& + 0.5 &y& − 3 y& = 0.5u . Obtenga la representación en el espacio de estado del sistema. 9. Considere el sistema descrito mediante la ecuación diferencial: 2&y&& − 5 &y& + 4 y& = 2u . Obtenga la representación en el espacio de estado del sistema. 10. Considere el sistema descrito por: ⎡ x&1 ⎤ ⎡− 4 − 1⎤ ⎡ x1 ⎤ ⎡1⎤ ⎢ x& ⎥ = ⎢ ⎥ ⎢ ⎥ + ⎢ ⎥u ⎣ 2 ⎦ ⎣ 3 − 1⎦ ⎣ x2 ⎦ ⎣1⎦ 7. ⎡x ⎤ y = [1 0]⎢ 1 ⎥ ⎣ x2 ⎦ Obtenga la función de transferencia del sistema. 11. Considere el sistema descrito por: ⎡ x&1 ⎤ ⎡− 4 − 3⎤ ⎡ x1 ⎤ ⎡0⎤ ⎢ x& ⎥ = ⎢ ⎥ ⎢ ⎥ + ⎢ ⎥u ⎣ 2 ⎦ ⎣ 3 − 1⎦ ⎣ x2 ⎦ ⎣1⎦ ⎡x ⎤ y = [1 1]⎢ 1 ⎥ ⎣ x2 ⎦ Francisco M. González-Longatt, Septiembre 2007 3 Teoría de Control 12. Considere el sistema descrito por: ⎡ x&1 ⎤ ⎡2 − 1⎤ ⎡ x1 ⎤ ⎡1⎤ ⎢ x& ⎥ = ⎢3 − 4⎥ ⎢ x ⎥ + ⎢0⎥u ⎦⎣ 2 ⎦ ⎣ ⎦ ⎣ 2⎦ ⎣ ⎡ x1 ⎤ y = [1 2]⎢ ⎥ ⎣ x2 ⎦ Obtenga la función de transferencia del sistema. 13. Obtenga la función de transferencia Xout(s)/Xin(s) de cada uno de los tres sistemas mecánicos de la Figura 7. En el diagrama, xin, representa el desplazamiento de la entrada y xout denota el desplazamiento de salida (cada deslizamiento se mide a partir de su posición de equilibrio). xin k1 b k2 xout Figura 7. Sistema mecánico 14. Obtenga la función de transferencia Xout(s)/Xin(s) de cada uno de los tres sistemas mecánicos de la Figura 8. En el diagrama, xin, representa el desplazamiento de la entrada y xout denota el desplazamiento de salida (cada deslizamiento se mide a partir de su posición de equilibrio). xin b1 m b2 xout Figura 8. Sistema mecánico 15. Obtenga la función de transferencia Xout(s)/Xin(s) de cada uno de los tres sistemas mecánicos de la Figura 9. En el diagrama, xin, representa el desplazamiento de la entrada y xout denota el desplazamiento de salida (cada deslizamiento se mide a partir de su posición de equilibrio). xin k1 m k2 xout Figura 9. Sistema mecánico Francisco M. González-Longatt, Septiembre 2007 Solo para ser empleado con objetivo de evaluación, o académicos. Prohibido la reproducción total o parcial de este documento. Derechos de Autor Reservados. Copyright © 2007. Francisco M. Gonzalez-Longatt. fglongatt@ieee.org Obtenga la función de transferencia del sistema. 4 Modelación Matematica de Sistemas Dinamicos 16. Obtener el modelo matemático del sistema mecánico mostrado en la Figura 10. x Solo para ser empleado con objetivo de evaluación, o académicos. Prohibido la reproducción total o parcial de este documento. Derechos de Autor Reservados. Copyright © 2007. Francisco M. Gonzalez-Longatt. fglongatt@ieee.org k u (t ) m Figura 10. Sistema mecánico 17. Obtener el modelo matemático del sistema mecánico mostrado en la Figura 11. x k1 k2 u (t ) m Figura 11. Sistema mecánico 18. Obtener el modelo matemático del sistema mecánico mostrado en la Figura 12. x u (t ) m k1 k2 Figura 12. Sistema mecánico 19. Obtener la representación en el espacio de estado del sistema mecánico de la Figura 13, en donde u1 y u2 son las entradas y y1 y y2 son salidas. u1 k1 m1 y1 k2 u2 b1 m2 y2 Figura 13. Sistema mecánico 20. Obtener la función de transferencia Vout(s)/Vin(s) del sistema eléctrico mostrado en la Figura 14. Construir el diagrama de bloques correspondiente a la representación del sistema. + R1 C1 + R2 Vin Vout C2 − − Figura 14. Sistema eléctrico 21. Obtener la función de transferencia Vout(s)/Vin(s) del sistema eléctrico mostrado en la Figura 15. Construir el diagrama de bloques correspondiente a la representación del sistema. Francisco M. González-Longatt, Septiembre 2007 5 Teoría de Control R1 + L1 R2 Vin Vout C2 − − Figura 15. Sistema eléctrico 22. Obtener la función de transferencia Vout(s)/Vin(s) del sistema eléctrico mostrado en la Figura 16. Construir el diagrama de bloques correspondiente a la representación del sistema. + R1 + L1 R2 Vin Vout L2 − − Figura 16. Sistema eléctrico 23. Dado el siguiente sistema eléctrico (Figura 17), hallar la función de transferencia Iout(s)/Vin(s) y el diagrama de bloque correspondiente, mostrando el flujo de todas las senales indicadas. L1 R1 R2 + Vin I1 + C1 V1 − I3 I2 C2 − + V2 I out L2 − Figura 17. Sistema eléctrico 24. Dado el siguiente sistema eléctrico (Figura 18), hallar la función de transferencia VL(s)/iout(s) y el diagrama de bloque correspondiente, mostrando el flujo de todas las señales indicadas. + I in − Ie If Ri + − + IL αI e R0 RL VL − If RF + − β VL RG Figura 18. Sistema eléctrico Referencias Documentales [1] Ogata, K., Ingeniería de Control Moderna, Prentice Hall, 1980. Francisco M. González-Longatt, Septiembre 2007 Solo para ser empleado con objetivo de evaluación, o académicos. Prohibido la reproducción total o parcial de este documento. Derechos de Autor Reservados. Copyright © 2007. Francisco M. Gonzalez-Longatt. fglongatt@ieee.org +