Fecha: Octubre 31 de 2003 B-Examen 5 (Ing) Nombre: C´odigo:
Anuncio
 Nombre: C´odigo:")
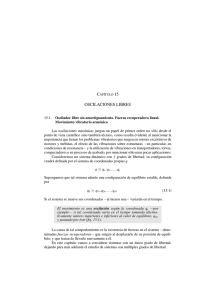
Fecha: Octubre 31 de 2003 B-Examen 5 (Ing) Nombre: Código: 2 1. Concidere la ecuación diferencial ddt2x + x(t) = sen 2 t. El método de coeficientes indeterminados suministra la solución particular 1) 4) 2sen t − cos 2 t 3 sen 2 t 3 2) 5) −sen 2 t 4 −sen 2 t 3 3) − cos 2 t 6) ninguna de las anteriores 2 2. Concidere la ecuación diferencial ddt2x + x(t) = cos t. El método de coeficientes indeterminados suministra la solución particular 1) 4) t sen2 t 2 t cos t 2 2) t sent 5) 3) t2 sent 2 t sent 2 6) ninguna de las anteriores 3. Si un péndulo de longitud l =20 cm oscila sin fricción y sin forzamiento. El tiempo que toma cada oscilación es de: r r r 5 5 1 1) 8 π 2) 2 π 3) π g g g r r 2 5 4) 4 π 5) 4 π 6) ninguna de las anteriores g g 4. El mecanismo de un cañón de un tanque se puede modelar mediante un sistema masa–resorte–amortiguador. Supóngase que la masa es la del cañon, igual a 100 kg, el coeficiente de amortización es c = 80 y la constante del resorte es k = 4 λ2 , en unidades apropiadas en el sistema MKS, donde λ es una constante. Supóngase que el movimiento del cañon respecto de la posición de equilibrio, después de un disparo en el tiempo t = 0, está descrito por el problema de valor inicial: 100x00 + 80 x0 + 4 λ2 x = 0. El valor de la constante λ para que el sistema esté amortiguado crı́ticamente es: 1) 0 2) 16 3) 2 4) 4 5) 5 6) ninguna de las anteriores 1 x 10 7.5 5 2.5 10 20 30 40 t -2.5 -5 -7.5 5. Un resorte atado a un techo tiene una longitud de 15 cm. Cuando se le cuelga una masa de 20 gr se alarga, quedando en reposo con una longitud de 17 cm. Si se desplaza la misma masa 2 cm de su posición de equilibrio y se suelta; despreciando la fricción entonces la constante del resorte y la posición de la masa a los t∗ = 7 √π10 s están dadas respectivamente por: 1 2) k = 9800 x(t∗ ) = −2 2 3) k = 4900 x(t∗ ) = −2 4) k = 9,8 x(t∗ ) = −1 1 6) ninguna de las anteriores 5) k = 980 x(t∗ ) = − 2 1) k = 9800 x(t∗ ) = 6. Si la posición x(t) de un oscilador está dada por el gráfico anterior entonces la expresión para x(t) es: ln 3 10 2π 2π t 2) 10 exp−10 t cos t 3) 10 exp− 10 t cos t 5π 5 5 ln 3 2π 2π 10 cos t 5) 10 exp− 10 t sen t 6) 10 exp−10 t sen t 10 10 2π 1) 10 exp−10 t cos 4) ln 3 exp 10 t 2 1 7. Un oscilador mecánico se describe mediante 10 dd tx2 + 4δ x(t) = 100 cos 3π t, donde δ es un parámetro que puede ser ajustado en el oscilador. El valor que debe tomar δ para que el oscilador entre en resonancia con el forzamiento externo es: 1) 800 π 2 4) 160 π 2 2) 360 π 2 5) 160 π 2 3) 260 π 6) 80 π 2