PREINFORME No 12 (Medidor de Revoluciones motor DC)
Anuncio
")
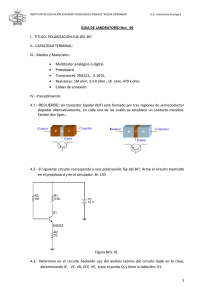
01/04/2014 UNIVERSIDAD PROGRAMA TECNOLÓGICA DE TECNOLOGÍA DE PEREIRA ELÉCTRICA LABORATORIO DE ELECTRÓNICA INTEGRADA PROFESOR: JOSE NORBEY SANCHEZ FERNANDEZ PREINFORME No 12: “ TEMPORIZADORES, CONTADORES Y DECODIFICADORES ” Diseñar un SISTEMA ESTROBOSCÓPICO PARA LA MEDICIÓN DE REVOLUCIONES DE UN MOTOR. Este sistema consta de varias partes: Para el preinforme, investigue cómo funciona el EL FRECUENCÍMETRO DIGITAL CD4553 Y CD4543 .TODOS LOS GRUPOS 1,2 Y 3 1. Un control de velocidad para motor DC usando la técnica de modulación por anchura de pulsos (PWM). Para este se debe diseñar un modulador del tiempo de encendido ton que permita variar el ciclo de servicio (%D = ton / T) de la salida entre el 0 y el 100%. Variando el ciclo de servicio por medio de un potenciometro se busca controlar la velocidad del motor para tomar varias lecturas de velocidad y verificar así que el medidor de revoluciones funciona adecuadamente. La frecuencia de la señal modulada debe ser 100Hz. 2. Un generador de luz estroboscópica de estado sólido. EL circuito encenderá y apagará una lámpara de estado sólido con una señal simétrica y con una frecuencia ajustable entre 1Hz y 1kHz, por medio de un potenciómetro para el control de la frecuencia. 3. Un medidor de frecuencia con visualización digital por display de 7 segmentos y con bases de tiempo: para la lectura de 1s y para la visualización de 100ms. Este circuito se encuentra diseñado y explicado en el proyecto No 22 del “Curso Práctico de Electrónica Digital Moderna” de CEKIT, llamado FRECUENCIMETRO DIGITAL, solo se deben calcular todos los componentes para el preinforme (los resultados de los cálculos deben ser cercanos a los usados en este diseño y que se incluyen en la lista de materiales del mismo, en todos los casos calcular las potencias). Los parámetros de diseño y las preguntas en cada caso son: Para R10 a R12 asumir que la corriente Sinking de base de cada transistor es 8mA y VLEDon = 2V. Si hFEmin = 100 para Q3, Q4 y Q5, cuál es la corriente de colector máxima para cada transistor en saturación. Para R13 a R19 asumir que la corriente media por segmento es 7mA, tenga en cuenta que hay multiplexión de tres dígitos en el circuito, y además, que el VLEDon = 2V para cada LED por segmento. Para R20 asumir que la corriente por segmento es 7mA y que el VLEDon = 2V para cada LED de segmento. Cuál es la función de C5 y por qué su valor. Para R2 asumir que la corriente IC de IC1 en saturación es 100μA y VCE=0,1V. Para R3 asumir que la corriente IB de Q1 en saturación es 8mA. Para R1 asumir que la corriente máxima del LED de IC1 es 5mA y el máximo voltaje pico de entrada es 50Vp. Para R4 asumir que la corriente IC de Q1 en saturación es 10mA y VCE=0,2V. Con las condiciones de tiempo que se definen en este numeral para las bases de tiempo de lectura y visualización calcule a R5, P1, R6 y C2. Para que son los condensadores C1 y C3?. Cuál es la función de la red C4 y R7, y como podría llamarse este circuito. Con que fin se pone D1 y como se elige (calcular IF? y PIV?). Para R8 asumir que la corriente IB de Q2 en saturación es 1mA. Para R9 asumir que la corriente IC de Q2 en saturación es 1,5mA y VCE=0,1V. Modo de operación El funcionamiento del variador de velocidad es independiente del resto del sistema, este sólo se encarga de permitir que sean modificadas las revoluciones a las cuales gira el motor DC. El sistema de luz estroboscópica funciona en conjunto con el frecuencímetro digital, este usa un pulsador de MEDIDA que se presiona para iniciar la medición. Para efectuar la medición se debe pegar una marca reflectiva u opaca en el eje del motor, y hacer que este gire a una velocidad constante. Para medir la velocidad se debe activar la lámpara estroboscópica por medio del pulsador de MEDIDA y dirigir la luz al eje del motor, luego variando la frecuencia de las pulsaciones de la luz se debe buscar el momento en el cual se sincronizan las pulsaciones de luz con el giro del eje del motor, esto se determina cuando parece quedar estático el eje del mismo y por medio del frecuencímetro, se leerá la frecuencia de las pulsaciones dentro de una base de tiempo de un segundo, así, la lectura obtenida en los displays serán las revoluciones por segundo (RPS) a las cuales esta girando el motor. Para comprobar el buen funcionamiento del motor se deben hacer varias medidas a velocidades diferentes y en cada caso se deberá usar un tacómetro calibrado para confrontar los datos de velocidad obtenidos con el sistema estroboscópico, y si es necesario calibrarlo. Condiciones del Diseño: ** Usar +12VCC para la alimentación del sistema. ** El motor DC es de imán permanente, de 24VDC y 25W. ** Para controlar el motor usar un transistor de efecto de campo (MOSFET) de referencia IRF830 debidamente protegido. ** Usar el circuito integrado 555 o el 556 para el diseño MONOESTABLES que sean necesarios. ** Usar a la entrada de MEDICIÓN un pulsador NO. ** Usar una lámpara de estado sólido de luz blanca de +12V y 4,5W. de los ASTABLES y ** La interfaz de potencia que maneja la lámpara será construida con transistores bipolares. Se dispone de transistores 2N3904, 2N3906, TIP31, TIP32, TIP41 y TIP42, elegir el adecuado. ** El frecuencímetro digital debe ser construido con los circuitos integrados CD4553 y CD4543, y con los displays y la interfaz de transistores adecuada para la multiplexión. ** Para la lógica de soporte, si es necesaria, usar cualquier tipo de compuerta. NOTAS 1. Cuando se desconozca el factor de amplificación de corriente, se puede considerar que los transistores de baja potencia (con corriente menor a 1A) tienen un h FE mínimo de 100 y los transistores de potencia media y alta (con corriente entre1A y 10A) tienen un h FE mínimo de 10 (en todos los casos prácticos, si es posible, siempre es mejor medirlo). 2. El diseño debe incluir la magnitud y la potencia de todos los componentes usados. En la figura se muestra el diagrama en bloques del circuito. Construir el circuito que se muestra en diagrama de bloques y hacer la lista de materiales correspondiente.