PROBLEMA: Dado el sistema de la siguiente figura, ajuste el valor... para que el margen de fase del sistema sea de...
Anuncio

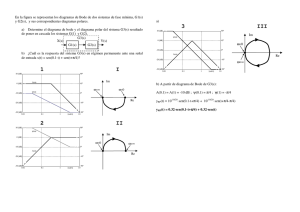
PROBLEMA: Dado el sistema de la siguiente figura, ajuste el valor de KR para que el margen de fase del sistema sea de 45º. ¿Qué ocurriría con el margen de fase y la estabilidad del sistema si la realimentación tiene un retardo puro de un segundo? ¿Qué corrección habría que hacer sobre KR para mantener la estabilidad del sistema? Y(s) X(s) _ + G(s) R(s) R ( s) = K R G(s) = 1 ( s + 1) H (s) = 10 s+2 H(s) M(s) SOLUCIÓN: Se dibuja inicialmente el diagrama de bode del sistema en bucle abierto R(s)·G(s)·H(s), suponiendo un valor inicial para KR, por ejemplo KR=1. -0º A(ω) para KR=1.78 14 dB 1 10 · ( s + 1) (s + 2) 5 R( jω )·G( jω )·H ( jω ) = ( jω + 1)(0.5· jω + 1) 20·log5 = 14dB R( s)·G( s)·H ( s) = K R · ω1 = 1 rad / s ω 2 = 2 rad / s A(ω) 10 [dB] para KR=1 -45º ψ(ω) 0 [dB] -90º 5 dB -10 [dB] -135º γ=45º -180º -20 [dB] 0.1 0.2 1 2 ωγ=3.6 10 20 [rad/s] 100 A través de este trazado se puede ver que, para que el margen de fase sea de γ=45º, la frecuencia a la que corta la curva A(ω) la horizontal por 0 dB debe de ser aproximadamente ωγ=3.6 rad/s. Para ello, la curva A(ω) que se ha trazado para KR=1 debería de subir al menos 5 dB, es decir, hay que multiplicar KR por 105/20=1.78: KR=1.78 El efecto sobre la estabilidad del sistema de la presencia de un retardo puro en la realimentación es muy negativo: puede hacer que el margen de fase se haga incluso negativo haciendo al sistema en bucle cerrado inestable. Esto se puede ver al trazar el diagrama de bode de un retardo T=1 segundo que, al sumarlo al Bode anterior, dará como resultado que el margen de fase se baje aproximadamente 206º a la pulsación ωγ=3.6, haciendo inestable el sistema. G (s) = Y(s) = e −T · s X(s) 20 [dB] 90º donde T = 1 G ( jω ) = e −ω · j = 1 − ω ψ(ω) 10 [dB] A(ω ) = 0 [dB] -0º ψ (ω ) = −ω [ rad ] 180 para ωγ = 3.6 ⇒ ψ (ωγ ) = −3.6· = −206.26º A(ω) 0 [dB] -90º π -206º Y(s) X(s) + _ R(s) H(s)·e-T·s M(s) G(s) -10 [dB] -20 [dB] 0.1 -180º 0.2 1 2 ωγ=3.6 10 20 [rad/s] Bode de un retardo puro de un segundo -270º 100 20 [dB] 0º 19 dB A(ω) para KR=1.76 ψ(ω) -90º 10 [dB] 19 dB -45º -180º 0 [dB] γ=-161º -10 [dB] -270º -206º -20 [dB] 0.1 0.2 1 2 ωγ=3.6 10 20 [rad/s] -360º 100 Bode de R(s)·G(s)·H(s)·e-s El margen de fase con el retardo de un segundo en la realimentación sería γ=-161º, el sistema M(s) será inestable. Para recuperar la estabilidad con un margen de fase de nuevo de γ=45º, habría que hacer “descender” la curva A(ω) 19 dB. Es decir, multiplicar la KR actual por 10-19/20=0.1122: KR=1.76·0.1122 ≈0.2 APENDICE Si el retardo fuese sólo de 0.1 segundos: Hará que el margen de fase se reduzca haciendo al sistema en bucle cerrado menos estable. Esto se puede ver al trazar el diagrama de bode de un retardo T=0.1 segundos que, al sumarlo al Bode anterior, dará como resultado que el margen de fase se reducirá aproximadamente 20º. G( s) = Y(s) = e −T · s X(s) 20 [dB] donde T = 0.1 -0º 20º ψ(ω) G ( jω ) = e −0.1·ω · j = 1 − 0.1·ω 10 [dB] A(ω ) = 0 [ dB] ψ (ω ) = −0.1·ω [rad ] -45º 180 para ω γ = 3.6 ⇒ ψ (ω γ ) = −0.1·3.6· = −20.6º 0 [dB] π A(ω) -90º Y(s) X(s) + _ R(s) H(s)·e-T·s M(s) G(s) -135º -10 [dB] -180º -20 [dB] 0.1 0.2 1 2 Para mantener el margen de estabilidad anterior sería necesario disminuir el valor de KR. ωγ=3.6 10 20 [rad/s] 100