Problema 1
Anuncio

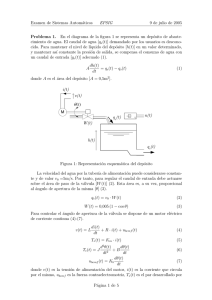
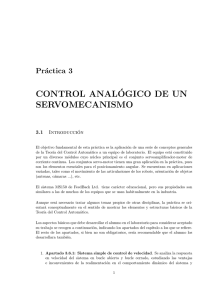
Examen de Sistemas Automáticos EPSIG 10 de febrero de 2005 Problema 1 El motor de corriente continua ha sido utilizado habitualmente en la industria para todo tipo de tareas en las que se precisa control preciso de la velocidad o de la posición. En la figura 1 se muestra el esquema de control de posición (θ(t)) de este motor por medio de un regulador proporcional; en la figura 2 el controlador es un proporcional integral con prefiltro; y en la figura 3 se presenta como alternativa el control en cascada. La figura 4 recoge los diagramas de Bode de magnitud de diversas funciones de transferencia relativas a las tres implementaciones, siendo P las curvas correspondientes al control proporcional, PI al proporcional-integral con prefiltro, y C al control en cascada. 1. Analizar comparativamente la capacidad de seguimiento de referencias de las tres alternativas. Indicar el ancho de banda de cada una de ellas. 2. Analizar comparativamente la capacidad de rechazo de perturbaciones de carga (TL (t)) de las tres alternativas. 3. ¿Cuál de las tres alternativas es la más robusta desde el punto de vista de la posible variación de los parámetros del motor? 4. Evaluar el efecto de una perturbación de carga (TL (t)) de amplitud 1Nm y frecuencia 0, 1Hz sobre la posición en cada una de las alternativas presentadas. 5. Para poder implementar cualquiera de estas alternativas, es necesario utilizar un actuador que proporcione al motor la tensión de alimentación necesaria (u(t)) para su funcionamiento. ¿Qué opción necesita un actuador de más prestaciones (desde el punto de vista de generar tensión de mayor amplitud)? ¿Cuál serı́a la alternativa que necesitarı́a un modulador de tensión de menos capacidad? 6. Evaluar la tensión necesaria (u(t)) para rechazar una perturbación de carga (TL (t)) de amplitud 1Nm y frecuencia 0, 1Hz en cada una de las alternativas presentadas. ¿Se eliminará totalmente la perturbación? 7. ¿Qué funciones de transferencia serı́an necesarias para determinar la corriente i(t) que habrı́a que inyectar al motor para poder implementar el control? Obtener matemáticamente una de ellas sólo para el caso del control proporcional. 8. ¿Qué ventajas e inconvenientes presenta el control proporcional-integral con prefiltro frente al control proporcional? Nota: Todas las respuestas deben estar justificadas adecuadamente. TL (s ) θ * (s ) ′ θ * (s ) ε(s ) P u(s ) i(s ) Te (s ) 1 Kp Ls + R ubemf (s ) Kbemf ω(s ) 1 θ(s ) 1 s Js + B Motor de corriente continua Figura 1: Diagrama de bloques del control de posición de un motor de corriente continua por medio de un regulador proporcional (P). El examen continúa en el reverso de la página. Página 1 de 2 Examen de Sistemas Automáticos EPSIG 10 de febrero de 2005 TL (s ) θ (s ) ε(s ) *′ * θ (s ) F PI u(s ) ω(s ) 1 θ(s ) 1 s Js + B i(s ) Te (s ) 1 Kp Ls + R ubemf (s ) Kbemf Motor de corriente continua Figura 2: Diagrama de bloques del control de posición de un motor de corriente continua por medio de un regulador integral con prefiltro (PI). TL (s ) θ * (s ) ′ θ * (s ) ε(s ) ω * (s ) C P (s ) CV (s ) Te* (s ) 1 i * (s ) Kˆ u(s ) 1 Ls + R CC (s ) p i(s ) ubemf (s ) Kp Te (s ) 1 Js + B ω(s ) 1 θ(s ) s Kbemf Motor de corriente continua Figura 3: Diagrama de bloques del control de posición de un motor de corriente continua por medio de regulación en cascada (C). ε (s) Magnitud (dB) 0 -20 C P θ *(s) -50 PI -40 -100 PI -60 P C -150 0 θ (s) TL ( s ) P PI Magnitud (dB) θ (s) 0 θ *(s) u(s) θ *(s) C 50 -50 C P 0 -100 PI -50 -150 u(s) TL ( s ) 10 Magnitud (dB) 0 P C PI ε (s) 0 -20 -10 θ *' ( s ) C P -40 -20 PI -60 -30 10 -1 0 10 1 10 2 3 10 10 Frecuencia (rad/s) 4 10 5 10 -1 10 0 10 1 10 2 3 10 10 Frecuencia (rad/s) 10 4 5 10 Figura 4: Funciones de transferencia de los sistemas de control de posición. Fin del examen. No olvidar escribir el nombre y apellidos antes de entregar. Página 2 de 2 Examen de Sistemas Automáticos EPSIG 10 de febrero de 2006 Problema 2 En la figura 1 se propone un esquema de control para la orientación de un LEM (módulo de excursión lunar, aeronave destinada a transportar los astronautas desde el módulo de mando a la superficie de la Luna; ver figura 2 derecha). Como se aprecia, el par T (s) generado por los chorros de gas se ha considerado proporcional a la señal del compensador V (s). Puede suponer a efectos de cálculos KJ2 = 1. Análisis inicial. Dibuje a mano alzada y razone (no hace falta que calcule valores) cómo será la respuesta ante entrada escalón: 1. del sistema en cadena abierta (K1 = 0) y sin compensar (Gc (s) = 1) 2. del sistema en cadena cerrada (K1 = 1) y sin compensar (Gc (s) = 1) Diseño. Se desea que el sistema realimentado presente un ancho de banda (ωB ) de 3 rad/seg, un coeficiente de amortiguamiento relativo ζ = 0,45 y un error nulo en régimen permanente referido al seguimiento de rampas. 1. Obtenga usando el diagrama de Bode una red de compensación que cumpla los requisitos. Puede hacer uso de la relación mostrada en la figura 2. 2. Interprete los resultados alcanzados apoyándose en los lugares de las raı́ces del sistema sin compensar y del sistema compensado. Figura 1: Control de orientación en el módulo de excursión lunar (LEM) Figura 2: Izda. Relación entre amortiguamiento relativo y margen de fase. Dcha. Apolo 11 LEM abandonando la Luna, con la Tierra al fondo. Fotografı́a de la NASA. NOTA: Las gráficas ası́ como la inspiración del problema han surgido del libro ”Modern Control Systems”, de R.C. Dorf y R. H. Bishop, 9a edición, Prentice Hall, 2001. Fin del problema. No olvide escribir el nombre y apellidos antes de entregar. Página 1 de 1 Examen de Sistemas Automáticos EPSIG 10 de febrero de 2006 Problema 3 El sistema de control de una planta de tipo ball & beam (bola y carril), consta de los siguientes elementos (ver fig. 1): x mg sen( ) or de sens ión posic m servo mg x^ u Controlador x* Figura 1: Sistema de control del Ball & Beam Ball & beam: El sistema consiste en una bola que gira por un carril inclinado un ángulo θ cuya ecuación del movimiento es la siguiente: J + m · ẍ = m · g · sen(θ) − B · ẋ + m · x · (θ̇)2 R2 m R J g B = = = = = 0,1 kg 0,015 m 0,00001 kg · m2 10 m/s2 0,2 N · s · m−1 Servo: El ángulo θ se gobierna mediante un servo cuya relación entre la referencia de tensión u(t) y el ángulo θ es un sistema de primer orden de ganancia K = 1 y constante de tiempo τ = 0,1 s. Sensor : La posición de la bola se mide mediante un sensor de ultrasonidos que puede considerarse instantáneo y de ganancia unitaria x̂ = x Controlador : El control es de tipo proporcional u = Kp · (x∗ − x̂) Se pide: 1. Linealizar el sistema en torno al punto de equilibrio dado por x∗ = 0. (→ 10 %) 2. Obtener el diagrama de bloques. (→ 10 %) El examen continúa en el reverso de la página. Página 1 de 2 Examen de Sistemas Automáticos EPSIG 10 de febrero de 2006 3. Dado el Bode de la fig. 2, hallar los márgenes de ganancia y de fase para Kp = 1. Determinar el rango de valores de Kp que hacen el sistema estable. (→ 10 %) 4. Describir para Kp = 1 la naturaleza del movimiento que describe la bola ante un cambio de consigna, dando cifras aproximadas donde sea posible, en cuanto (→ 60 %): a) Estabilidad relativa del sistema. b) Carácter oscilatorio del movimiento de la bola. c) Rapidez de los movimientos de la bola. d ) Precisión de la posición final de la bola en relación con la consigna. e) ¿qué pasa con la bola si por un desajuste en el acoplamiento mecánico del motor el ángulo del carril tiene 5o de diferencia con el teórico? f ) El sensor de posición tiene un retardo puro debido al tiempo de ida y vuelta de los pulsos de ultrasonidos. Indicar qué efectos puede producir eso en el sistema de control. 5. Describir los problemas que pueden encontrarse al implementar de forma práctica el sistema de control. (→ 10 %) Bode Diagram 60 Magnitude (dB) 40 20 0 -20 -40 -60 -90 Phase (deg) -135 -180 -225 -270 10 -2 10 -1 10 0 10 1 10 2 Frequency (rad/sec) Figura 2: Bode de la función de lazo L(jω) = Gmotor (jω) · Gballbeam (jω) · Gsensor (jω) Fin del problema. No olvidar escribir el nombre y apellidos antes de entregar. Página 2 de 2 Problema 3 Apartados 1,2 y 3