Examen de Sistemas Autom´ aticos. Convocatoria de Enero. 21/01/2015 Problema.
Anuncio

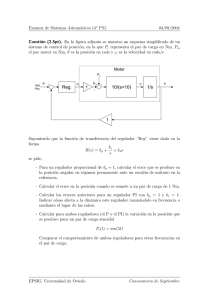
Examen de Sistemas Automáticos. Convocatoria de Enero. 21/01/2015 Problema. El sistema de servoposicionamiento del eje X de un sistema de ensamblado de componentes electrónicos responde al siguiente modelo: 0,01 · dx(t) + x(t) = u(t) + d(t) dt donde x(t) es la posición en el eje X del cabezal-herramienta y u(t) es tensión aplicada al servo. Se sabe además que el servo está sometido a vibraciones externas de 10 Hz originadas por un motor próximo y que afectan a la posición x(t) como una perturbación d(t) según se describe en la ecuación del sistema. Con el objeto de reducir el efecto de las vibraciones y mejorar la precisión, se decide incorporar un lazo de control externo al servo de manera que, midiendo la posición x(t), se compara con una referencia x∗ (t) y en función de la diferencia un controlador genera una tensión u(t) de entrada al servo. Se pide: a) Obtener el diagrama de bloques, indicando sobre él todas las señales y sistemas. b) Obtener un regulador del tipo s+a s que haga que la sobreoscilación sea del 4, 32 % y el tiempo empleado en alcanzar el 95 % del valor de permanente sea de 0,03 segundos. Justificar todos los cálculos realizados, incluyendo el lugar de las raı́ces. D1 (s) = K · c) Indicar cómo serı́a la dinámica del sistema (si es estable o inestable, si sobreoscila más o menos, si es más rápido o menos...) para valores positivos de K mayores y menores al obtenido en el apartado anterior. Justificar adecuadamente las respuestas. d) Comparar el regulador obtenido con el regulador alternativo D2 (s) = 10 indicando cuál de los dos controladores proporcionarı́a una mayor inmunidad del sistema de ensamblado ante vibraciones de 10 Hz. Justificar con cálculos y gráficas la respuesta. 1






![[Prac02-Práctica]](http://s2.studylib.es/store/data/003990522_1-c9e8b6ff51f0ace51efff19331b3253a-300x300.png)

![[Prac04-Prepráctica]](http://s2.studylib.es/store/data/003990525_1-41331ebe459f9fda3bbfeaaf681bca09-300x300.png)
