Máquinas síncronas 1
Anuncio

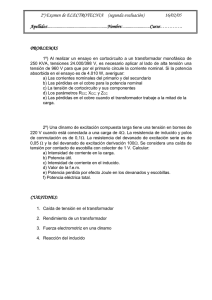
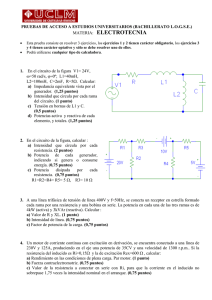
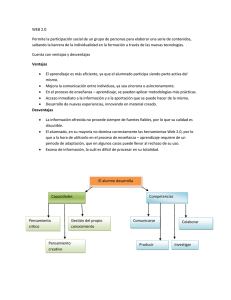
MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. TEMA 4 MÁQUINAS SÍNCRONAS INDICE 1.- PRINCIPIOS DE FUNCIONAMIENTO Y FUNDAMENTOS TEÓRICOS............ 2 2.- FUNCIONAMIENTO DE LA MAQUINA SINCRONA COMO GENERADOR. .. 5 2.1.- FUNCIONAMIENTO EN VACIO Y EN CARGA DE LA MÁQUINA SÍNCRONA COMO GENERADOR. .......................................................................... 5 2.2.- ECUACIONES GENERALES Y CIRCUITO EQUIVALENTE. ...................... 9 2.3.- ENSAYOS PARA LA DETERMINACION DEL CIRCUITO EQUIVALENTE. ....................................................................................................... 13 2.4.- POTENCIA Y PAR EN LA MAQUINA SINCRONA. .................................... 16 2.5.- REGULACIÓN DE TENSION. ........................................................................ 18 2.6.- CURVAS CARACTERISTICAS ...................................................................... 21 3.- FUNCIONAMIENTO DE LA MÁQUINA SÍNCRONA COMO MOTOR............ 24 3.1.- CARACTERÍSTICAS DE SERVICIO DEL MOTOR SÍNCRONO. .............. 25 3.2.- ARRANQUE DE LOS MOTORES SÍNCRONOS. .......................................... 29 Máquina Síncrona, 1 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. 1.- PRINCIPIOS DE FUNCIONAMIENTO Y FUNDAMENTOS TEÓRICOS. Como la generalidad de las máquinas rotativas, consta de una parte fija (estátor) y una móvil (rótor), constituyendo el circuito magnético de la máquina. Igualmente dispone de dos circuitos eléctricos situados sobre el estátor y rótor de la máquina, relacionados a través del circuito magnético, siendo su característica principal que el devanado inducido se encuentra alojado en el ranurado del estátor y el circuito inductor, alimentado por corriente contínua, en el rótor. En máquinas de pequeña potencia, esta distribución suele estar invertida, estando el circuito inducido en el rótor y el inductor en el estátor. El nombre de máquina síncrona viene como consecuencia del imperativo de funcionar, únicamente, a la velocidad de sincronismo, que como sabemos, viene definida por la frecuencia de las corrientes del estátor y por el número de polos de la máquina. n1 = 60 f1 P La utilización de la máquina síncrona como generador de c.a. está generalizada, siendo el elemento convertidor de uso, prácticamente exclusivo, en los centros de producción de energía eléctrica. La rigidez impuesta entre la frecuencia, número de polos y velocidad, establece para una frecuencia normalizada en Europa de 50 Hz. la siguiente relación. P=1 ⇒ n = 3.000 r.p.m. P=2 ⇒ n = 1.500 r.p.m. P=3 ⇒ . . n = 1.000 r.p.m. . . Por las formas constructivas del sistema de excitación, las máquinas síncronas se clasifican en máquinas de polos salientes y de polos lisos. La utilización de uno u otro tipo depende fundamentalmente de las velocidades a las que se trabaja. Generalmente, las máquinas de bajo número de polos (alta velocidad), suelen ser de polos lisos, ocurriendo justamente lo contrario, elevado número de polos (bajas velocidades) en el caso de las máquinas de polos salientes. Máquina Síncrona, 2 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. Para alimentar el circuito de excitación existen, básicamente, dos procedimientos: - Mediante el juego de anillos rozantes - escobillas. - Utilización de un sistema de suministro de c.c. a partir de la generación de la potencia necesaria en una fuente montada sobre el mismo eje de la máquina. En su funcionamiento como generador, el devanado rotórico es alimentado con una tensión contínua, que proporcionará un campo Φ0, cuya curva de inducción en el entrehierro es de forma sinusoidal. Si mediante un sistema exterior aplicamos un par de giro al rótor este se desplazará con una velocidad angular ω1, siendo el flujo concatenado con el circuito inducido una función periódica y que dependerá de su posición respecto al eje del inductor. Φ = N Φ0 cos ω1t Esta variación de flujo inducirá una f.e.m. igual a: e( t ) = − dΦ = − N Φ0 sen ω1t = − E0 sen ω1t dt Si en lugar de haber una sola bobina existen tres bobinas desplazadas 2 π obtendremos un sistema de tensiones trifásico de valor: 3 e1 ( t ) = − E0 sen ω1t e2 ( t ) = − E0 sen ( ω1t − 2π ) 3 e3 ( t ) = − E0 sen ( ω1t − 4π ) 3 La tensión, en valores eficaces, inducida en cada una de las fases del sistema sabemos que vale: E = 4,44 ξ f1 N Φ0 Si el circuito inducido se encuentra cerrado a través de una carga trifásica, circularán unas corrientes que darán lugar a un campo que gira en el mismo sentido que el rótor y con una velocidad igual a la del rótor, dada por: Máquina Síncrona, 3 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. n1 = 60 f1 P G G La presencia de los campos del sistema inductor e inducido ( βR y β S ) originan un par dado por: G G MI = K βR × β S G G G Siendo: β T = β R + β S . Podemos poner: G G G G G G G G G MI = K β R × ( β T − βR ) = K ( β R × β T ) − K ( βR × β R ) = K β R × β T La magnitud del par nos viene dada por: MI = K βR β T sen α Este par, funcionando la máquina como generador, será de sentido contrario al desplazamiento del rótor actuando como par resistente. Cuando la máquina síncrona funciona como motor, se alimentan los circuitos inductor e inducido. La alimentación del devanado inducido mediante un sistema trifásico de corrientes, da origen a un campo magnético giratorio de velocidad: n1 = 60 f1 P Máquina Síncrona, 4 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. Mientras el rótor esté en reposo, aunque se encuentre alimentado con una corriente contínua, el par será nulo. El campo de rótor se encuentra fijo en el espacio mientras que el del estátor gira a velocidad de sincronismo. El par resultante entre ambos campos, cambiaría alternativamente de sentido siendo nulo a lo largo de un periodo. Este inconveniente en el arranque puede ser salvado si, mediante otra máquina auxiliar, lanzamos el rótor a una velocidad próxima a la del campo del estátor. Esta situación permitiría un par resultante no nulo, funcionando ahora la máquina como motor. Si debido a un incremento importante del par resistente ofrecido por la carga, el ángulo de desfase entre ambos campos supera los 90º eléctricos, el par cambiaría de sentido, lo que originaría la parada del motor. 2.- FUNCIONAMIENTO DE LA MAQUINA SINCRONA COMO GENERADOR. Como en el resto de las máquinas el funcionamiento de la máquina síncrona como generador y como motor, presenta particularidades que conviene ser analizadas de forma diferenciada. Comenzaremos analizando el comportamiento de la máquina como generador y posteriormente los haremos como motor. 2.1.- FUNCIONAMIENTO EN VACIO Y EN CARGA DE LA MÁQUINA SÍNCRONA COMO GENERADOR. 2.1.1.- FUERZA ELECTROMOTRIZ INDUCIDA. La forma de onda de la f.m.m., en máquinas de polos salientes es rectangular de ancho igual al paso polar. Con el fin de obtener una forma de onda lo más próximo a la senoidal, el valor del entrehierro debe variar, en forma senoidal, con un valor máximo teóricamente infinito en la zona neutra y un valor mínimo en el centro del polo. En las máquinas de polos lisos, la forma de obtener una onda lo más próximo posible a la senoide es a través de una distribución de las bobinas en el devanado inductor de tal forma que presente, a lo largo de un paso polar, una estructura escalonada. En ambos caso, la descomposición de la onda según la serie de Fourier, da lugar a la onda fundamental y un conjunto de armónicos impares Máquina Síncrona, 5 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. Al girar el rótor, se inducirán en el conjunto de conductores del estátor, una f.e.m. cuya variación en el tiempo será similar a la variación de la f.m.m en el entrehierro de la máquina. Esta f.e.m. será función de la frecuencia de rotación, del flujo debido a cada una de las ondas de inducción, del número de espiras y de las características del devanado utilizado. Su valor por fase será: E0 = E201 + E203 +....+E20n Siendo E01, E03,.....,E0n las f.e.m.s debidas a la onda fundamental y a los armónicos impares correspondientes. 2.1.2.- FUNCIONAMIENTO EN VACIO. La máquina funciona en vacio cuando no existe carga alguna acoplada al circuito inducido. La f.e.m. inducida, vale: E0 = 4,44 ξ f1 N Φ0 = K Φ0 ω Para una velocidad constante, el valor de la f.e.m es función del flujo y por tanto de la corriente de excitación. E0 = f (Iex) 2.1.3.- FUNCIONAMIENTO EN CARGA. Cuando por los devanados del circuito inducido de la máquina circula corriente (funcione como motor o como generador) decimos que la máquina trabaja en carga. En este caso, la tensión en los terminales de la máquina difiere de la f.e.m. inducida debido a la conjunción de varios fenómenos a considerar. Como en la máquina de c.c., al circular corriente por el devanado inducido aparece el efecto de reacción, en este caso de mayor complejidad ya que, a diferencia de la máquina de contínua donde el flujo de reacción permanece constante en el tiempo y en el espacio, en al máquina síncrona su valor y posición depende de las características de la carga. La resistencia de los devanados y la dispersión de flujo originan una caida de tensión que afectará a la relación de tensiones de la máquina. El flujo disperso, al ser variable en el tiempo, genera en los devanados del inducido una f.e.m. de autoinducción de valor Xσ⋅ l, siendo Xσ la reactancia Máquina Síncrona, 6 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. total de dispersión. Esta f.e.m. de reactancia, en forma compleja se puede expresar como: G G Eσ = − j Xσ I 2.1.3.1.- REACCIÓN DE INDUCIDO EN LA MÁQUINA SÍNCRONA POLIFÁSICA. Cuando la máquina síncrona funciona en carga, ya sea como motor o como generador, la corriente por el devanado inducido determina una f.m.m. de reacción Fi. Esta f.m.m. junto a la del sistema inductor Fe, configuran el flujo resultante Φ, útil a efectos de generación de la f.e.m. en carga Er. Previo a la determinación de la f.m.m. resultante, debemos conocer la influencia de las características de la carga en la posición que ocupan los vectores representativos de ambas f.m.m.s. Cuando la máquina se encuentra en vacio, la única onda presente es la del inductor y el eje de la dicha onda se encontrará alineada con el eje de los polos. Consecuentemente, la f.e.m. inducida tendrá su valor máximo en la línea longitudinal y será nula en la línea neutra magnética. Cuando la máquina funciona en carga, el desfase impuesto por la impedancia de carga entre la corriente y la f.e.m. inducida estará comprendido π π entre + y − . 2 2 Supongamos inicialmente que la carga es de carácter resistivo puro. La corriente irá en fase con la tensión, siendo la posición de la f.m.m de reacción la indicada en la figura. Como podemos observar, la reacción de inducido es Máquina Síncrona, 7 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. transversal y retrasada π / 2 respecto de la f.m.m. del inductor. La composición de ambas f.m.m.s. determinan la magnitud y posición de la resultante FT. Sen tido de corrient e F.m.m. Excitacion (Fex) F.m.m.total (FT) F.m.m. inducido (Fi) Para cargas inductivas, el desfase entre la tensión y la corriente sería de π / 2 en retraso. La corriente será máxima cuando la tensión fuese nula y con tensión máxima la corriente será nula. Como podemos observar en la figura, la f.m.m. de reacción es totalmente desmagnetizante, es decir, su vector representativo está en oposición a la f.m.m. del inductor. Máquina Síncrona, 8 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. En el supuesto de cargas capacitivas, la corriente va adelantada π / 2 a la tensión. La f.m.m. de reacción es en este caso de carácter magnetizante. Para cualquier otro valor del ángulo de desfase entre la tensión y la corriente, la f.m.m. de reacción (Fi) será parcialmente longitudinal y transversal, teniendo carácter magnetizante o desmagnetizante en función de las características de la carga. La f.m.m. resultante (FT) se puede obtener realizando directamante la composición vectorial de las f.m.m.s. del inductor y de reacción (método de la reacción única) o bien realizar la descomposición de la f.m.m. de reacción en dos componentes, una en fase y otra en cuadratura con la f.e.m E0 (método de las dos reacciones o de Blondel). 2.2.- ECUACIONES GENERALES Y CIRCUITO EQUIVALENTE. Conocida la relación de flujos en la máquina síncrona y con la finalidad de establecer el modelo, debemos conocer la relación entre las distintas magnitudes que intervienen en su funcionamiento. Cuando la máquina funciona en vacio, el único flujo presente es el de excitación, cuya variación temporal es de forma sinusoidal, dando origen a una f.e.m. generada en el devanado inducido, cuya expresión es: E0 = 4,44 ξ N f Φ0 = K f Φ0 En su funcionamiento en carga, habrá que considerar los siguientes aspectos: Máquina Síncrona, 9 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. - Además del flujo de excitación Φex, la circulación de corriente por el circuito inducido, origina la presencia de un flujo de reacción cuya posición espacial depende de las características de la carga acoplada a la salida de la máquina, resultando un flujo total: ΦT = Φex +Φr - La tensión “U” de salida no coincidirá, generalmente, con la f.e.m. generada debiendo considerarse, además de las caidas de tensión óhmica e inductiva en el devanado inducido, la influencia en la relación de tensiones que produce el flujo de reacción. Llamando EC a la f.e.m. generada en carga y cuyo valor es función de la variación temporal de ΦT, se cumplirá: G G G G E C = U + R I + j Xσ I Su representación fasorial, supuesta conectada a la salida una carga de carácter inductivo es: Después de estas consideraciones, podemos representar el diagrama de tensiones, f.m.m.s y flujos completo. Máquina Síncrona, 10 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. De la ecuación de tensiones obtenemos el vector tensión U por diferencia entre la f.e.m en carga Ec y la suma de la caida de tensión óhmica más la originada por el flujo disperso. G G G G U = Ec − ( R I + j Xσ I ) De la relación entre las f.m.m.s podemos obtener la posición del vector Fex y con él la del flujo Φ0. G G G Fex = FT + (−Fr ) Considerando aisladamente cada uno de estos flujos giratorios, las f.e.m.s. inducidas en el devanado del estátor debidas a cada una de ellas irán desfasadas π / 2 en retraso. Siendo E0 la f.e.m debida al flujo Φ0, y Er la f.e.m. inducida por el flujo de reacción Φr, la f.e.m. resultante Ec inducida por el flujo resultante será: ΦT ⇒ EC Φ0 ⇒ E0 Φr ⇒ Er G G G Ec = E0 + Er De donde: G G G E0 = Ec + (−Er ) Máquina Síncrona, 11 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. Esta Er va desfasada π/2 respecto de la corriente, de ahí que sea factible considerarla como una f.e.m. de reactancia. G G Er = − j Xr I Sustituyendo en la relación anterior: G G G E0 = Ec + j Xr I En base a estas consideraciones, el efecto de reacción de inducido puede asimilarse a una reactancia Xr en serie con un generador de f.e.m E0. Sustituyendo en la relación de tensiones establecida inicialmente: G G G G G G G E0 = U + R I + j Xσ I + j Xr I = U + I [ R + j ( Xσ + Xr ] Englobando en una sola reactancia la de reacción de inducido y la de dispersión tenemos la llamada reactancia síncrona. Xs = Xr + Xσ El circuito equivalente será el que se indica: La suma de la resistencia R y de la reactancia síncrona Xs nos defina la impedancia síncrona Zs. G Zs = R + j Xs En base a ello, la ecuación de la máquina queda: G G G G G G E0 = U + ( R + j X s ) I = U + Z s I Máquina Síncrona, 12 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. A partir de los valores representativos de la tensión en bornes U, de la corriente l y del ángulo de desfase “ϕ“ que fija la carga, bastará sumar vectorialmente a U, la caida de tensión óhmica R l, en fase con la corriente, y la caida inductiva j Xs l, normal en avance a la corriente, para obtener la f.e.m. E0. Llevando este valor sobre la curva de vacio, la abscisa correspondiente nos dará la corriente de excitación necesaria para la carga fijada. 2.3.- ENSAYOS PARA LA DETERMINACION DEL CIRCUITO EQUIVALENTE. 2.3.1.- CARACTERÍSTICA DE VACIO. La máquina funciona en vacio cuando no existe carga alguna acoplada al circuito inducido. La f.e.m. inducida, vale: E0 = 4,44 ξ f1 N Φ0 = K Φ0 ω Para una velocidad constante, el valor de la f.e.m es función del flujo y por tanto de la corriente de excitación. E0 = f (Iex) Su determinación gráfica se realiza de forma similar a la de las máquinas de corriente contínua, haciendo funcionar la máquina a la velocidad de sincronismo y tomando valores de la tensión inducida para distintas corrientes en el circuito de excitación. La forma de la curva responde al comportamiento del circuito magnético, presentando una zona donde existe una linealidad entre Iex y E0. A medida que el circuito comienza a saturarse, se inicia un codo para posteriormente continuar, aproximadamente en forma de recta, donde para incrementos mínimos en la f.e.m. inducida se requiere grandes valores de la corriente de excitación. Máquina Síncrona, 13 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. E0 E0=f(Iex) Iex 2.3.2.- CARACTERÍSTICA DE CORTOCIRCUITO. La característica de cortocircuito representa la relación entre la corriente de inducido y la de excitación, funcionando la máquina a su velocidad nominal y con los bornes de salida en cortocircuito. De la ecuación de la máquina y para una tensión en bornes U = 0. G ICC = G G E0 E0 ≅ R + j XS j XS Como podemos observar, la corriente de cortocircuito es totalmente reactiva, luego la f.m.m de reacción Fr, es desmagnetizante, siendo la FT la diferencia aritmética entre la f.m.m. de excitación y la de reacción. FT = Fex − Fr La forma de la característica es lineal y para valores muy elevados de la corriente de excitación, se flexiona ligeramente. Máquina Síncrona, 14 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. Representando conjuntamente las características de vacio y cortocircuito podemos obtener el valor de la impedancia síncrona. Sobre la parte rectilínea de la característica de vacio y para un valor determinado de la corriente de excitación, como por ejemplo OP , mediremos sobre la característica lineal la f.e.m. inducida en vacio por fase E0´ = P M y sobre la característica de cortocircuito la corriente de cortocircuito por fase ICC = P N . La impedancia síncrona no saturada nos viene definida como el cociente entre la f.e.m. E0´ y la corriente ICC. ZS = E0 ′ P M = ICC P N La reactancia síncrona no saturada la podemos calcular mediante: Máquina Síncrona, 15 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. XS = Z S2 − R2 Si suponemos despreciable el valor de la resistencia “R” frente al de la reactancia “Xs”, tendremos: XS ≅ PM = ZS PN Midiendo sobre la curva real de vacio, en lugar de tomar como referencia la característica lineal, el cociente de esta f.e.m. E0 = P′ M′ por la corriente de cortocircuito I´CC, correspondiente a la misma corriente de excitación Iex =OP ′ , nos dará la impedancia síncrona saturada. Z SS = E0 P ′ M′ = I′CC P ′ N′ El valor de esta impedancia ya no es una constante de la máquina ya que se reduce al aumentar el grado de saturación por lo que solo se considera el valor correspondiente a la tensión nominal de la máquina. 2.4.- POTENCIA Y PAR EN LA MAQUINA SINCRONA. La potencia en bornes de una máquina síncrona, ya sea en su funcionamiento como generador o como motor, viene expresada mediante: P = m U l cos ϕ Cuando funciona como generador, no toda la potencia mecánica que llega al generador se transforma en eléctrica a la salida. La diferencia entre la potencia de salida y la de entrada corresponde a las pérdidas del generador. La potencia mecánica de entrada es la potencia en el eje del generador. Pent = M ω Descontando a esta potencia las pérdidas mecánicas y en el hierro obtendremos la potencia eléctrica interna, cuyo valor para la máquina trifásica será: Pein = Mi ω = 3 E0 l cos ψ La potencia eléctrica entregada por el generador será: Máquina Síncrona, 16 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. Psal = 3 UL IL cos ϕ O también en valores de fase: Psal = 3 U l cos ϕ De la misma forma, la potencia reactiva entregada por el generador será: Qsal = 3 UL lL sen ϕ Qsal = 3 U l sen ϕ Despreciando la resistencia de inducido frente al valor de la reactancia síncrona Xs, podemos obtener una expresión de gran utilidad para el cálculo de la potencia entregada por el generador. De la representación fasorial: I cos ϕ = E0 sen δ XS Sustituyendo en la expresión de la potencia: Psal = 3 UE0 sen δ XS Según esta última ecuación, la potencia entregada por un generador depende del ángulo que forman la f.e.m. en vacio E0 y la tensión U en la carga. Este ángulo es conocido como ángulo de par. Máquina Síncrona, 17 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. Como hemos supuesto que la resistencia del inducido es igual a cero, la potencia eléctrica interna es igual a la potencia de salida. El valor del par será: Mi = Pi ω1 Sustituyendo la potencia por el valor calculado anteriormente: Mi = 3 E0 U sen δ ω1 X S 2.5.- REGULACIÓN DE TENSION. Del circuito equivalente de la máquina podemos deducir la influencia de las reactancias de dispersión y reacción de inducido sobre la caida de tensión en la máquina. Para una misma corriente de excitación, la diferencia entre la f.e.m. generada en vacio y la tensión de salida depende de la corriente y factor de potencia que defina las características de la carga. Entendemos por caida de tensión la diferencia entre E0 y U. Si referimos este valor a la tensión en la carga obtenemos el coeficiente de regulación en la máquina. E= E 0 -U U Para la determinación de la caida de tensión existen distintas técnicas, unas con mayor grado de precisión que otras. En nuestro caso nos centraremos en el método de Behn-Schenburg por su aplicación y grado de simplicidad. Este método está basado en la consideración de que, para una misma corriente de excitación, la diferencia entre la f.e.m. generada en vacio y la tensión en la carga es debida a la caida de tensión óhmica y a la caida de tensión en una reactancia XSB, que corresponde a la parte imaginaria de la Máquina Síncrona, 18 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. impedancia síncrona saturada, determinada como cociente entre E0 e ICC para una misma corriente de excitación. ⎡E ⎤ XSB = Im ⎢ 0 ⎥ ⎣ ICC ⎦ G G G E 0 = U + I (R+jXSB ) Este método no es excesivamente preciso por el procedimiento seguido para el cálculo de XSB. Al obtener la reactacia síncrona saturada XSB como cociente entre E0 e ICC introducimos errores ya que la ICC utilizada corresponde a un valor de corriente sin que el circuito magnético esté saturado, situación generalizada en el funcionamiento de las máquinas. Obtenida la impedancia síncrona saturada ZSS, y por tanto el circuito equivalente, las situaciones a considerar son: - Conocidas U, I, y cos φ, determinar la excitación necesaria. G G G E 0 = U + I (R+jX SB ) Determinado el valor de E0, mediante la curva de vacio obtenemos la Iex necesaria. - Conocidas Iex , I, y cos φ, determinar el valor de U. Máquina Síncrona, 19 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. - Para valores constantes de las corrientes de inducido y excitación, la tensión en bornas de la máquina es función del factor de potencia que presenta la carga Máquina Síncrona, 20 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. 2.6.- CURVAS CARACTERISTICAS 2.6.1.- CARACTERÍSTICA EXTERIOR. Es la curva representativa de la variación en la tensión en bornes del generador, en función de la corriente de carga suministrada por la máquina, manteniendo constante la velocidad, la corriente de excitación y el factor de potencia de la carga. La forma de la curva depende de las características de la carga. Con cargas resistivas puras, la corriente se retrasa respecto de la f.e.m. E0, dando lugar a un efecto desmagnetizante y una importante distorsión debida al efecto de reacción de inducido, totalmente transversal. Si además de este efecto se considera la caida de tensión que origina la reactancia de dispersión y la resistencia efectiva del devanado, es fácilmente deducible que la tensión disminuya con la carga. Con cargas de carácter inductivo, el efecto desmagnetizante del flujo de reacción toma valores considerables, que junto a las caidas óhmica y reactiva, provocan descensos considerables de la tensión con la carga, tanto mayores cuanto menor es el “cos ϕ“. Máquina Síncrona, 21 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. Para cargas de carácter capacitivo, el efecto magnetizante del flujo de reacción, provoca aumentos de tensión en la máquina con la carga. 2.6.2.- CARACTERÍSTICA DE REGULACIÓN. Esta característica es a tensión constante y representa la relación entre la corriente de excitación y la corriente de carga, manteniendo constante la tensión, la frecuencia y el “cos ϕ“ de la carga. Máquina Síncrona, 22 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. De las curvas podemos deducir que para cargas inductivas, ante aumentos en la corriente de carga, la corriente de excitación deberá aumentar de forma considerable para mantener la tensión constante. Estos incrementos en la corriente de excitación serán tanto mayores cuanto menor sea el “cos ϕ“ de la carga. En caso de cargas capacitivas, el efecto magnetizante del flujo de reacción de inducido obliga a disminuir la excitación con la carga para mantener constante la tensión en bornes de la carga. Máquina Síncrona, 23 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. 3.- FUNCIONAMIENTO DE LA MÁQUINA SÍNCRONA COMO MOTOR. Como se expuso al tratar los principios generales de la máquina síncrona, en su funcionamiento como motor, presenta el inconveniente de que funciona únicamente a la velocidad de sincronismo. Al alimentar el circuito de excitación con las corriente Iex se produce un campo BR.. El sistema trifásico que alimenta el estátor origina un campo magnético giratorio BS. El campo del rótor intentará alinearse con el giratorio del estátor. Esto no es posible por sí mismo al estar sometido a pares alternativos de sentido contrario. En consecuencia, el motor síncrono, necesita ser lanzado a una velocidad igual o próxima a la de sincronismo. B B Como el motor síncrono es físicamente la misma máquina que el generador, las ecuaciones de velocidad, potencia y par son las mismas que las estudiadas en su funcionamiento como generador. El diagrama fasorial de la máquina, funcionado como generador, es el que se indica. El circuito y el diagrama fasorial correspondiente a este régimen de funcionamiento serán: G G G G G G E 0 =U-( R+jX s ) I=U-Zs I Máquina Síncrona, 24 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. 3.1.- CARACTERÍSTICAS DE SERVICIO DEL MOTOR SÍNCRONO. Se estudiará el comportamiento de los motores bajo distintas condiciones de carga y corriente de excitación. Buscando una mayor simplificación del estudio consideraremos la resistencia de inducido despreciable. 3.1.1.- CARACTERÍSTICA PAR - VELOCIDAD. Los motores síncronos alimentan, generalmente, cargas que funcionan a velocidad constante. La tensión en bornes y la frecuencia del sistema de alimentación serán constantes independientemente de la potencia absorbida por el motor. La velocidad de giro del motor está directamente relacionada con la frecuencia eléctrica, por lo que la velocidad del motor será constante, independientemente de la carga acoplada a su eje. La velocidad debe permanecer estable desde su funcionamiento en vacio al par máximo que él puede entregar (Par de desenganche). La ecuación del par es: G G Mi = k BR × B T sen δ O en función de magnitudes eléctricas: Mi = 3 E0 U sen δ ω1 X S El valor máximo del par será para sen δ = 1 ⇒ δ = π/2 Máquina Síncrona, 25 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. Cuando el par aplicado sobre el motor excede su valor máximo, el rótor no puede seguir la velocidad de giro del campo, pierde velocidad y queda expuesto a contínuos cambios de sentido del par, lo que da lugar a bruscas vibraciones del motor como consecuencia de la pérdida de sincronismo. El par máximo vendrá expresado por la siguiente relación: G G Mmax = k BR × B T Mmax = 3 E0 U ω1 X S Relaciones que nos indican que cuanto mayor valor de la corriente de excitación, mayor valor del par máximo y por tanto mayor estabilidad. 3.1.2.- RESPUESTA ANTE LOS CAMBIOS DE CARGA EN EL MOTOR. Cuando un motor está acoplado a la red, la velocidad es la de sincronismo y el par el necesario para hacer girar la carga a dicha velocidad. Si la carga sobre el eje del motor aumenta, el rótor sufrirá inicialmente una dasaceleración que da lugar a un aumento del ángulo del par “δ“, y consecuentemente un mayor par. Este aumento del par acelerará el rótor y el motor volverá a la velocidad de sincronismo, pero con un ángulo de par superior al inicial. La representación fasorial correspondiente a las condiciones iniciales del motor es el siguiente. Máquina Síncrona, 26 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. A medida que aumenta la carga, el vector representativo de la f.e.m. E0 se desplazará más respecto de su posición inicial. Como esta f.e.m. solo depende del flujo inductor y de la velocidad, parámetros que no han sido modificados, el valor de la f.e.m E0 permanece constante con la carga. Al modificarse la posición G del fasor E0, cambia el vector representativo de la caida de tensión jXS I y por tanto la corriente absorbida. El vector representativo de la corriente no solo cambia de módulo sino que tambien el ángulo de desfase respecto de “U”. Es importante observar que los segmentos proporcionales a la potencia aumentan igualmente. 3.1.3.- RESPUESTA ANTE EL CAMBIO DE LA CORRIENTE DE CAMPO EN EL MOTOR. Otro efecto interesante es la modificación de la corriente de campo, manteniendo constante la potencia entregada por el motor. Como el cambio de la corriente de campo no afecta a la velocidad y como la carga acoplada al eje no ha sido modificada, la potencia entregada no es alterada. Cuando la corriente de campo aumenta, la f.e.m. E0 aumentará igualmente pero desplazándose a lo largo de una línea de potencia constante. Máquina Síncrona, 27 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. Las distancias proporcionales a la potencia en el diagrama fasorial serán constantes (E0 sen δ y l cos ϕ). A medida que el valor de E0 aumenta, la corriente de inducido disminuye y posteriormente aumenta. En función de los valores que toma la f.e.m E0 la corriente está en retraso, en fase o en adelanto y el motor se comporta como una carga inductiva-resistiva, resistiva o de carácter capacitivo. La representación en un sistema de ejes de la corriente de inducido, en función de la corriente de campo, constituye la llamada curva en “V” del motor. Existen distintas curvas correspondientes a los distintos niveles de potencia. Como podemos deducir de la representación vectorial, la corriente mínima de inducido se presenta con factor de potencia unidad. Controlando la corriente de campo del motor podemos regular la potencia reactiva absorbida o entregada a la red. Existe un valor límite inferior de la corriente de campo por debajo del cual el motor no puede entregar la potencia demandada, perdiendo el sincronismo. Estos puntos determinan el llamado límite de estabilidad del motor. Máquina Síncrona, 28 MÁQUINAS ELECTRICAS. Dpto Teoría de la Señal y Comunicaciones. Área Ingeniería Eléctrica. 3.2.- ARRANQUE DE LOS MOTORES SÍNCRONOS. Existen distintas técnicas para el arranque del motor, basadas en los siguientes principios: - Arranque por medio de un motor de lanzamiento hasta la conexión en paralelo con la red, exactamente igual que su funcionamiento como generador. - Arranque como motor asíncrono y su posterior sincronización al excitar el circuito inductor. - Arranque por reducción de frecuencia en el estátor hasta un valor suficientemente bajo para que el rótor pueda enganchar con el campo giratorio antes de que cambie de sentido el par. El procedimiento de arranque por medio de un motor auxiliar se basa en la conexión del motor a la red como generador. Una vez conectado, se prescinde del motor de lanzamiento, el rótor se desacelera y el campo magnético del rótor se retrasa respecto del campo resultante, pasando a funcionar como motor. El arranque como motor asíncrono es el procedimiento más generalizado, utilizando para ello el devanado amortiguador. El devanado rotórico amortiguador da al motor síncrono las características de arranque de un motor asíncrono, y como tal se pone automáticamente en marcha al conectarlo a la red. El motor, en estas condiciones de funcionamiento, no alcanza la velocidad de sincronismo pero sí una velocidad muy próxima a ella si funciona en vacio. Durante el proceso de arranque, el devanado inductor debe estar en cortocircuito con el fin de evitar las sobretensiones que se originarían si estuviesen a circuito abierto. Una vez completado su periodo de aceleración, el rótor girará con un deslizamiento mínimo. En este instante se procede a la alimentación del circuito de excitación. La presencia del campo inductor y del inducido, proporciona un par pendular, que después de un cierto número de oscilaciones lleva al rótor a la velocidad de sincronismo. El arranque por control de frecuencia consiste en alimentar el estátor de la máquina con una frecuencia suficientemente baja para que el rótor pueda seguirlo. Posteriormente se incrementa de forma paulatina la frecuencia hasta llegar a sus valores nominales. Cuando el motor síncrono funciona a una menor fercuencia, la f.e.m. generada será menor, por lo que la tensión aplicada al estátor deberá reducirse de la misma forma para mantener la corriente del estátor en niveles admisibles. Máquina Síncrona, 29