Háptico - Robolabo
Anuncio

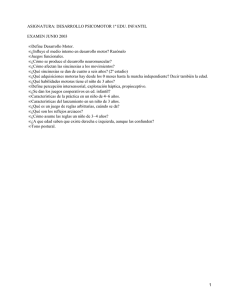
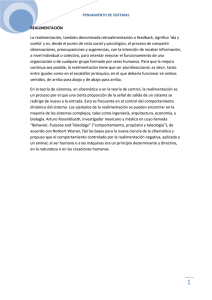
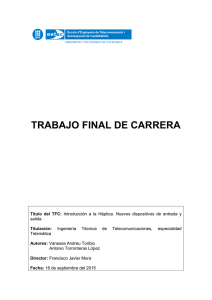
Dispositivos hápticos y cirugía robótica Félix Monasterio-Huelin Maciá robolabo.etsit.upm.es/haptico A. Ciencia e historia B. Dispositivos e Interfaces hápticos Cinemática Modos de interacción C. Sistemas hápticos Métodos de manipulación Métodos de control D. Cirugía robótica • • Ciencia e historia Dispositivos e Interfaces hápticos Cinemática Modos de interacción C. Sistemas hápticos Métodos de manipulación Métodos de control D. Cirugía robótica A) Ciencia e historia De la definición de háptico al robot con realimentación háptica Historia Enfoques para el estudio de la sensibilidad háptica DEFINICIONES Háptico, del griego “haptikos”: agarrar,tocar. Sinestesia: mezcla de impresiones de sentidos diferentes. Un sinestético puede, por ejemplo, oír colores, ver sonidos, y percibir sensaciones gustativas al tocar un objeto con una textura determinada. La sinestesia es un efecto común de algunas drogas psicodélicas, como el LSD o la mescalina. Cinestesia o kinestesia: Etimológicamente significa sensación o percepción del movimiento. En medicina y en psicología, esta palabra alude a la sensación que un individuo tiene de su cuerpo y, en especial, de los movimientos que éste realiza; sensación principalmente facilitada por los propioceptores, por ejemplo los ubicados en la cóclea del oído interno, y la percepción de la movilidad muscular. Fenómenos hápticos Sensaciones táctiles y vibro-táctiles ● ● ● ● ● ● ● Presión Textura Punción Propiedades térmicas Dureza Humedad Fenómenos de fricción inducida: – – – ● Características locales de objetos: – – – ● Deslizamiento Adhesión Micro fracturas Formas Contornos Realces Sensaciones vibro-táctiles: percepción de objetos que oscilan en contacto con la piel. Hay mecano-receptores. Percepción cinestésica o propioceptiva (Informa sobre el estado del cuerpo) ● ● ● Posición Velocidad Fuerzas musculares: tendones, haces musculares, articulaciones, etc. Anatomía, fisiología • • RECEPTORES SOMESTÉSICOS o SUPERFICIALES o SENSITIVOS Fuente: Lindsay, Bone & Callander (1993:195) RECEPTORES PROPIOCEPTIVOS O PROFUNDOS Fuente: Zigmond et al. (1999:770). CANALES HÁPTICOS Se habla de canales hápticos ya que se considera que ciertas partes anatómicas (en especial la mano) son órganos unitarios que hacen inseparable la percepcion y acción (enacción). Por ejemplo sujetar un objeto desconocido va acompañado de una exploración activa. El estudio de la utilización del tacto como medio de comunicación data de los años 80. Aparece el concepto de interacción hombre/máquina SOMESTESIA Alteraciones de la sensibilidad (terminología patológica) • Alteración cutánea o de la sensibilidad pasiva. La terminología "estesia" indica trastornos de la sensibilidad táctil o profunda. Ej.: Hiperestesia, Hipoestesia, Anestesia. • Alteración kinestésica o de la sensibilidad activa.La "estereognosia" es la identificación de objetos por el tacto. La "astereognosia", su incapacidad • • • • • • La patología relacionada con el dolor se describe con la terminación "-algesia". Ej.: Hiperalgesia, Hipoalgesia, Analgesia. "Palestesia"(vibración): Hiperpalestesia, Hipopalestesia; El término "batiestesia" se relaciona con el conocimiento de las “actitudes” segmentarias (posición del codo,...), y sus patologías serían: hiperbatiestesia, hipobatiestesia. Con el término "Barestesia" se denomina todo aquello relacionado con la presión. Con el de "grafoestesia" el reconocimiento táctil de números y letras escritos sobre la piel. Con el de "barognosia" la discriminación de pesos. Interacción con computadoras… • • • • Realimentación de fuerza: aplicación de fuerzas que se realimentan como sensación de impacto y vibración. Realimentación háptica: aplicación de fuerzas para discernir geometría y textura. Dispositivios hápticos. Cobots: utiliza los anteriores conceptos para guiar a los operadores en la realización de tareas de manipulación de materiales de manera suave, evitando la carga del operador e impidiendo el acceso a zonas restringidas. Realimentación háptica en cirugía mínimamente invasiva • • • Medida de la información háptica: Precisión quirúrgica, destreza Presentación de la información háptica: Visual, auditiva, háptica Problemas comerciales – – – • Coste Complejidad Biocompatibilidad Obtención de datos reales, para la planificación, diagnóstico y entrenamiento. ● ● La realimentación háptica es uno de los problemas aún no resueltos satisfactoriamente en las aplicaciones quirúrgicas Realimentación al cirujano de la cantidad de fuerza aplicada por el robot: proporciona un sentido de telepresencia HISTORIA ● ● ● ● ● ● Antigüedad: ilusiones hápticas Aristóteles, en “del alma” (metafísica). Distingue: – De animales y humanos: sensibilidad táctil pasiva o cutánea – Exclusivamente de humanos. Diderot,1749, La percepción de los ciegos. Condillac, Tratado de las sensaciones Radishev, s.XVIII. La mano en la formación de la conciencia. Primera mitad del siglo XIX: – Weber, Frey, etc. Psicofísica: Sólo la pasiva: cutánea y mucosa. – Seguidores como Skramlik, Head y otros: lo cutáneo y la palpación es un todo indiferenciado. • • Segunda mitad del s. XIX: sensibilidad mioarticular o cinestésica. – I. Sechenov (1829-1905). Reflexología.Fundamentos reflejos de mano y sensibilidad táctil. Influyó hasta los 60 del s.XX. – Estuvo trabajando en Paris en el laboratorio de Bernard, este autor demosotro la accion inhibidora del cerebro sobre la actividad refleja de la medula espinal, su obra mas importante es “Reflejos del cerebro”, de esta obra dijo Pavlov que le habia inspirado su interes por la investigacion. En esta obra señala que el cerebro, ademas de la medula trabaja en forma refleja lo cual implica una vision del psiquismo completamente objetiva. Su programa naturalista se centraba en investigar cientificamente la actividad psiquica del cerebro de los animales y del hombre. En su opinion era tarea de la fisiologia descubrir las leyes cientificas que rigen los fenomenos psiquicos. Hasta la teoría de la evolución de Darwin (1809-1882) no se busca fundamentar científicamente la percepción… Engels (1820-1895): la mano es lo primero, en “humanización del mono por el trabajo”. Siglo XX: biología • ● Katz (fenomenólogo) y Gibson (óptica ecológica), no comparten el atomismo o reduccionismo psicofísico: es la mano el órgano háptico, así como el ojo es el órgano visual… • D. Katz, 1925 (fenomenólogo): textura, temperaturas, peso,dureza, vibraciones, grosor de un papel, son más salientes para el sentido háptico que para el visual, o imposibles para éste último. Gibson,1962 (óptica ecológica): Tacto activo o háptico, como sistema exploratorio, y no como un sentido receptivoNo hay propiamente hablando sentidos sino sistemas perceptivos. No se realiza procesamiento de la información (pasivo) sino de affordances (facilitadores) en la interacción con el medio, interacción exploratoria. Enacción • Varela (1946-2001). • • • • La enacción es un nuevo modo de concebir el conocimiento según el cual éste se va configurando en imbricación directa con la situación vivida de la que surge y en ausencia de la cual carecería de cualquier justificación. La actividad cognitiva ya no es planteada como la mera representación de una realidad ya configurada que aquélla se limitaría a 'reproducir', sino que, "se modela continuamente a través de los actos que efectuamos" (Varela, Thompson y Rosch 1991 [1992: 173]), con el resultado de que "el mundo y quien lo percibe se definen recíprocamente" y la cognición pasa a ser entendida como la "historia del acoplamiento estructural que enactúa (hace emerger) un mundo" (Varela 1988 [1990: 109). De lo que se desprende que no es posible conocer sin experimentar la situación en que se inserta ese conocimiento, al tiempo que esa situación se va conformando en la medida que resulta conocida. Carácter, en definitiva, in fieri (lo que está por hacer), performativo y no representativo del conocimiento cuya peculiaridad Varela enfatiza con frecuencia a través de los famosos versos de Antonio Machado: "Caminante no hay camino, se hace camino al andar". Maturana: los seres vivos son máquinas, que se distinguen de otras por su capacidad de autoproducirse (autopoiesis): autonomía. Enfoques para el estudio de la sensibilidad háptica ¿Qué se investiga? 1. Sensibilidad cutánea: Ejemplo de sujeción de un huevo: formando una elipse. 2. Sensibilidad háptica: Ejemplo de discriminación de objetos. Movimientos exploratorios; extracción de propiedades de los objetos. Formas de investigar 1. Restringiendo la naturaleza de los movimientos exploratorios. Recorriendo superficies con la punta de un dedo. 2. Mediante el uso de dispositivos hápticos para aumentar el espacio de trabajo. Approaches to the Study of Haptic Sensing ● ● ● Denise Y. P. Henriques and John F. Soechting Department of Neuroscience, University of Minnesota, Minneapolis, Minnesota J Neurophysiol 93: 3036-3043, 2005 1. Sin el uso de dispositivos hápticos teletacto 2. Mediante el uso de dispositivos hápticos Mediante la generación de contornos: – – las fuerzas son cero cuando se está en el contorno, y al atravesar la figura se producen fuerzas elásticas. Investigación sobre muchas clases de figuras FIG. 1. Boundaries generated by the robot manipulandum. Subjects gripped the handle of the robot arm, which constrained the hand to move in a horizontal plane just above waist level. Robot exerted a force field, shown here by arrows, so that at a boundary, subjects felt a resistance as if they were hitting a wall. Some of the force boundaries ran in the mediolateral (x) direction or the anterior-posterior (y) direction (dotted lines), at the locations shown; these formed a grid spanning 45 x 30 cm centered on the body's midline, 15 cm in front of the subject's torso at the nearest point. Another 24 boundaries ran along the 45° diagonals, 4 of which are illustrated (dotted-dashed lines) in the top right corner of the workspace. a) Distorsión del espacio háptico FIG. 2. Distortions of haptic space. Schematic illustrates the various types of distortions in subjects' sense of the length or orientation of lines. Actual shape is shown by solid lines and the sensed shape is depicted by dashed lines. b) Síntesis háptica de formas complejas. ● ● Deberían aparecer todos los efectos de distorsión del espacio háptico estudiados. Pero aparecen nuevos fenómenos, posiblemente debidos a la realimentación visual. FIG. 4. Haptic sensing of the shape of quadrilaterals. Traces show results of 5 trials from one subject (top) and average results from all subjects (bottom). Heavy lines depict the traced quadrilaterals and the dotted lines show the subjects' reproductions made using the manipulandum (left side) or on a touch screen (right side). Circles mark the centroids of the traced shapes. Ellipses represent 68% confidence intervals for segment endpoints. Estudio de magnitudes psicofísicas ● ● ● ● ● Se trata de extaer relaciones funcionales entre parámetros o estímulos físicos y lo que se suele llamar, “dimesiones subjetivas” o respuesta sensorial. Uno de los objetivos es el diseño de dispositivos hápticos realistas. El concepto clave es el de “umbral sensorial”. Algunas de las leyes psicofísicas son también válidas para objetos (superficies) virtuales. Utilización de PHANTOM para la generación de estímulos hápticos. Requiere de un modelo teórico/práctico del fenómeno. • Ley de Weber: linealidad entre umbral diferencial (mínimo incremento perceptible) e intensidad del estímulo Modelos Relación percepción-acción • Percepción de profundidad: la acción influye incluso en ausencia de realimentación sensorial externa. Relación háptico-visual • Fuerza versus forma. Si se utlizan estímulos paradójicos se demuestra cierta preeminencia de lo háptico frente a lo visual. Por ejemplo la presentación simultánea de protuberancias (A1: visual; B1: táctil) y agujeros (A2:táctil; B2:visual). Se percibe lo que se ha presentado hápticamente (es decir B1 y A2). ● Se utilizó el dispositivo (o interface) háptico PenCAT/Pro (Immersion Canada Inc.). Ilusiones hápticas • ● • Ilusiones relacionadas con las visuales. La ilusión de Sander. La ilusión de Sander con patrones en bajorrelieve se cumple en la exploración háptica activa de videntes y ciegos. Dos ilusiones derivadas de la de Muller-Lyer. • • La ilusión de Jastrow (1891). (izquierda) las líneas parecen de arriba a abajo cada vez más grandes pero son todas iguales. La ilusión del paraleogramo de Sander (1926), en la que AB mide lo mismo que BC. Factors influencing the radial-tangential illusion in haptic perception James McFarland1 and John F. Soechting Experimental Brain Research Volume 178, Number 2 / April, 2007 According to the radial-tangential illusion, in the horizontal plane, arm movements executed in directions radial to the trunk are sensed to be longer than movements of the same length in the orthogonal direction. • Ilusiones propiamente hápticas. A. Ciencia e historia B. Dispositivos e Interfaces hápticos Cinemática Modos de interacción C. Sistemas hápticos Métodos de manipulación Métodos de control D. Cirugía robótica 2