Aparatos de Medida
Anuncio

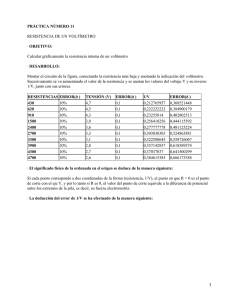
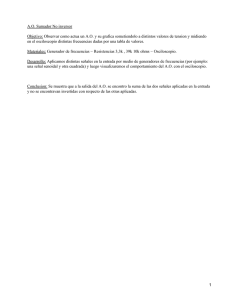
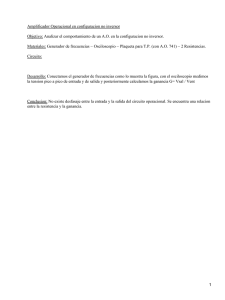
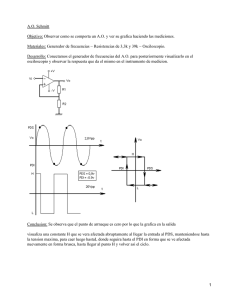
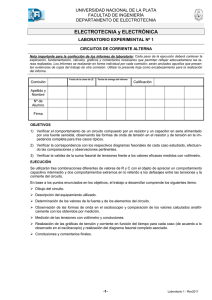
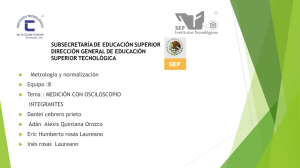
1 El polímetro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.1 Introducción. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.2 El polímetro analógico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.2.1 El amperímetro analógico en modo DC . . . . . . . . . . . . . . . . . . . . . . . . . 5 1.2.3 El voltímetro analógico en modo DC . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 1.2.4 Amperímetros y voltímetros en modo AC . . . . . . . . . . . . . . . . . . . . . . . 8 1.3 El polímetro digital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 1.3.1 Funcionamiento de los medidores digitales . . . . . . . . . . . . . . . . . . . . . 10 1.3.2 Características de los medidores digitales. . . . . . . . . . . . . . . . . . . . . . . 11 1.3.3 Polímetros digitales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 1.4 Utilización del amperímetro y el voltímetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 1.4.1 Utilización del voltímetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 1.4.2 Utilización del amperímetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 1.4.3 Utilización del amperímetro como voltímetro . . . . . . . . . . . . . . . . . . . 16 1.4.4 Utilización del voltímetro como amperímetro . . . . . . . . . . . . . . . . . . . 16 1.5 El Óhmetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 2 La fuente de alimentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 2.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 2.2 Características de las fuentes de alimentación . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 3 El osciloscopio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Sección de presentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.1 El tubo de rayos catódicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.2 Controles del cañon de electrones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.3 La pantalla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3 Sección vertical . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.1 Sistema de acoplamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.2 Sistemas de atenuación y amplificación . . . . . . . . . . . . . . . . . . . . . . . . 3.4 El sistema Horizontal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4.1 El generador de barrido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4.2 El sistema de disparo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4.3 Fuentes de sincronismo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4.4 El modo X-Y . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.5 Osciloscopios de doble canal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.5.1 Osciloscopios de doble haz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.5.2 Osciloscopios de doble traza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.6 Impedancia de entrada y sondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.7 El osciloscopio digital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.7.1 introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.7.2 La frecuencia de muestreo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.7.3 Cuantificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 25 26 26 26 27 29 29 30 32 32 34 36 37 38 38 39 43 46 46 46 48 4 Generadores de señal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1 Introducción. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1.1 El modelo circuital. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1.3 Salidas flotantes y salidas referenciadas a tierra. . . . . . . . . . . . . . . . . . 50 50 50 51 4.2 Características de los generadores de señal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2.1 Precisión en el ajuste de la frecuencia . . . . . . . . . . . . . . . . . . . . . . . . . 4.2.2 Estabilidad de la frecuencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2.3 Precisión en la amplitud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2.4 Distorsión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2.5 Espúreos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2.4 Impedancia de salida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3 Clases de generadores de señal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3.1 El generador sinusoidal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3.2 El generador de Funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 52 52 52 53 53 53 54 54 54 5 Bibliografía. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55 2 1 El polímetro. 1.1 Introducción. Los polímetros son los instrumentos de medida básicos en cualquier laboratorio de medidas eléctricas. Estos elementos se denominan polímetros por su capacidad de poder medir distintas magnitudes, en concreto, la mayoría de los polímetros son capaces de actuar como voltímetros amperímetros y óhmetro. Podemos clasificar a los polímetros dentro de dos grandes grupos, los polímetros analógicos y los polímetros digitales. Los polímetros analógicos están basados en un dispositivo electromecánico que causa el movimiento de una aguja a lo largo de una escala, se distinguen pues, por tener un sistema continuo (“analógico”) de marcación. Los polímetros digitales están basados en el muestreo y digitalización de la señal a medir y se distinguen fácilmente por tener un sistema de marcación digital (figura 1). Figura 1 1.2 El polímetro analógico El mecanismo más utilizado en los polímetros analógicos como mecanismo sensor es el galvanómetro D’Arsonval. Este mecanismo es sensible a la corriente y esta basado en la interacción de la corriente que circula por una bobina y el campo magnético generado por un imán permanente. Figura 2 La bobina puede moverse mediante un movimiento circular y posee un dispositivo de recuperación. Cuando no circula corriente la bobina está en reposo. Al aplicar una corriente esta tiende a moverse. Si la corriente es constante se produce una situación de equilibrio entre el par de deflexión producido por la fuerza magnética y el par recuperador debido al muelle de recuperación. La desviación alcanzada por la bobina es proporcional a la corriente que circula por ella. Si fijamos una aguja a la bobina y aplicamos una escala calibrada dispondremos de un dispositivo capaz de medir corrientes (figura 3). 3 Figura 3 Cuando la corriente que circula por la bobina varía lentamente con el tiempo la aguja responde con cierta inercia mecánica, esta inercia limita la repuesta del sistema a señales de baja frecuencia. Si la frecuencia es suficientemente elevada la respuesta es proporcional al valor medio de la señal, es decir, a su componente continua. El galvanómetro se caracteriza por una resistencia interna Rin debida a la resistencia del bobinado y la corriente que produce la deflexión máxima del galvanómetro. A la corriente que produce la deflexión máxima se la denomina corriente a fondo de escala Ife. A esta corriente se denomina también, sensibilidad del galvanómetro. En la figura 4 podemos ver la representación esquemática de un galvanómetro. Se representa como un galvanómetro ideal más una resistencia en serie cuyo valor es el valor de la resistencia interna del galvanómetro. Figura 4 Usando el modelo de la figura 4 podemos calcular el error introducido por el galvanómetro en el circuito de medida. Esto lo podemos ver en siguiente ejemplo. 4 Ejemplo 1 Tenemos un galvanómetro con una sensibilidad de 50 :A y una resistencia interna de 2K5 S, queremos medir la corriente que circula por una resistencia de 100 KS y alimentada con 5 V. Sin el galvanómetro la corriente que circula por la resistencia es: (1) Con el galvanómetro insertado la resistencia total del circuito será de 102.5 KS, con lo cual la corriente medida será: (2) El error cometido en la lectura debido al galvanómetro es: (3) En los galvanómetros se especifica el error de calibrado, que es el valor máximo entre el valor medido por el galvanómetro y el valor real. Este error se expresa en % de Ife y es un error absoluto de corriente, ya que el porcentaje de Ife es un valor fijo de corriente. Al ser un error absoluto su efecto es mayor en las lecturas al comienzo de la escala, por lo cual es conveniente realizar las medidas con la máxima deflexión posible. 1.2.1 El amperímetro analógico en modo DC El galvanómetro, pues, nos permite medir corrientes que no superen su sensibilidad, para poder medir corrientes mayores con él se coloca en paralelo con el galvanómetro una resistencia, denominada resistencia shunt que desvíe parte de la corriente a través de ella. Figura 5 5 El valor de la resistencia shunt depende la escala deseada, cumpliendose: (4) Ejemplo 2 Obtenga un medidor de 150mA a fondo de escala a partir de un galvanómetro con una resistencia interna de 50 S y una sensibilidad de 1 mA. (5) Para diseñar un amperímetro multirrango se colocan varias resistencias shunt en paralelo con el galvanómetro (figura 6). Figura 6 1.2.3 El voltímetro analógico en modo DC La mayor parte de los voltímetros analógicos están basados en el galvanómetro. Para comprender esto tenemos que tener en cuenta que el galvanómetro es capaz de medir corrientes, pero que por la ley de Ohm, la corriente que circula por un galvanómetro, es proporcional a la tensión entre sus bornas. Por ejemplo un galvanómetro con una resistencia interna de 1 KS y una sensibilidad de 1 mA, la tensión máxima que es capaz de medir será de 10-3 * 1000 = 1 voltio. Podemos pues, poner la escala de la aguja para que mida voltios en lugar de amperios, hasta un valor de 1 Voltio, valor de tensión a la cual la corriente que circula por el galvanómetro produce la máxima desviación de la aguja. Para aumentar el rango de medidas, podemos poner en serie con el galvanómetro, una resistencia (llamada multiplicadora). Esta resistencia limita la corriente que fluye a través del galvanómetro (figura 7). Figura 7 6 Para el cálculo de la resistencia debemos de tener en cuenta que cuando la tensión que hay en bornas del voltímetro es igual a la tensión a fondo de escala (tensión máxima que es capaz de medir a esa escala), la corriente que circula por él debe de ser igual a la sensibilidad del galvanómetro (corriente a fondo de escala del galvanómetro). (6) La resistencia de entrada del voltímetro (Rin + Rserie) depende de la escala de medida escogida. En el siguiente ejemplo, podemos ver como calculamos el valor de la resistencia. Ejemplo 3 Calcular la resistencia que se debe de colocar en serie con un galvanómetro de características Rin = 50S y corriente a fondo de escala de 1 mA para obtener un voltímetro de 10 V a fondo de escala. Para medir 10 V la resistencia total del voltímetro será: (7) Podemos diseñar fácilmente un voltímetro multirrango si introducimos varias resistencias y un conmutador entre ellas (figura 8) Figura 8 La sensibilidad del voltímetro expresa la relación entre la resistencia interna del voltímetro y la corriente a fondo de escala, esta relación es única y se expresa en S/V, S = 1/Ife. Valores típicos de S son 20000 S/V, que suponen una resistencia de entrada en la escala de 20 V de 20x20000 = 400 KS. En el siguiente ejemplo podemos ver el cálculo de la sensibilidad de un voltímetro basado en un galvanómetro con una corriente a fondo de escala de 1mA. (8) 7 1.2.4 Amperímetros y voltímetros en modo AC Los medidores AC son similares a los medidores DC, excepto que las magnitudes medidas están relacionadas con la forma de onda de la señal AC. Las magnitudes que pueden ser leídas por un medidor AC son el voltaje medio de la señal, el valor de pico o el valor eficaz de la señal. Los medidores AC, usualmente, están calibrados para medir valores eficaces de la señal. Los aparatos analógicos, como hemos comentado repetidamente, están basados en el galvanómetro D’Arsonval. Este tipo de aparatos responden al valor medio de la corriente que los atraviesa (el valor medio de la señal se puede medir, pues, con el medidor en modo DC, el valor medido es el valor medio de la señal). Por ello, para que el polímetro marque un valor distinto de cero, la señal debe de tener un valor medio no nulo (una señal sinusoidal, por ejemplo, tiene un valor medio cero, por lo que el galvanómetro mediría un valor cero en presencia de señal). Es necesario introducir un mecanismo de rectificación, a fin de obtener una señal de valor medio no nulo, capaz de producir una deflexión de la aguja del galvanómetro. El método más sencillo de rectificado es el rectificador de media onda. Este método de rectificado elimina los semiciclos negativos de la señal, quedando pues una señal de valor medio distinto de cero. El circuito más sencillo capaz de realizar esto utiliza un diodo y lo podemos ver en la figura 9. Otra manera de conseguir una señal de valor medio distinto de cero es mediante el circuito rectificador de onda completa (figura 10). Figura 9 Figura 10 Las señales a la salida de los rectificadores tienen un valor medio distinto de cero, y por lo tanto, el galvanómetro será capaz de medir (se produce desviación de la aguja). Vamos a ver el caso particular de la señal sinusoidal. El valor eficaz de una señal sinusoidal vale Vef = Vp /%2, y el valor medio de la señal rectificada por el circuito rectificador de media onda vale Vm = Vp/B y en el caso del circuito rectificador de onda completa vale Vm = 2Vp/B. La relación entre el valor medio de la señal rectificada y el valor eficaz de la señal están matemáticamente relacionados, mediante el denominado factor de forma (ecuación (9)): (9) 8 Si sustituimos los valores de la tensión eficaz (Vef = Vp /%2) y el valor medio (Vm = Vp/B media onda o Vm = 2Vp/B onda completa) en la expresión del factor de forma, nos queda que el valor del factor de forma para una señal sinusoidal utilizando el rectificador de media onda es FF = 2,22 y con el rectificador de onda completa el valor es FF = 1,11. Conociendo el valor del factor de forma para una señal determinada, podemos obtener el valor eficaz de dicha señal a partir del valor medio de la señal rectificada aplicando la ecuación 10. (10) Esta operación matemática se realiza en los aparatos empleando una escala que hace corresponder la desviación obtenida con el valor que se debe de leer, presuponiendose que la señal sobre la que se va a realizar la medida es una señal sinusoidal. Así pues, podemos medir valores eficaces con un medidor analógico siempre que la señal a medir sea una señal sinusoidal pura sin componente continua (la componente continua puede ser eliminada fácilmente mediante un condensador de valor elevado puesto en serie). En el caso de que la señal no sea una sinusoidal pura el valor medido sería erróneo, pues el factor de forma utilizado para calibrar la escala corresponde a una señal sinusoidal, por ello, se dice que los medidores analógicos son de falso valor eficaz. Si conocemos la forma de onda de la señal medida podemos compensar el error y obtener el verdadero valor eficaz. Ejemplo 4 Obtenga el verdadero valor eficaz y el error cometido si la señal medida es una señal triangular y el voltímetro marca una tensión de 2,22 Vef. Sabemos que el voltímetro muestra en el display un valor que 1,11 veces el valor medio de la señal, por lo que el valor medio de la señal rectificada será Vm = 2,22/1,11 = 2 voltios. También sabemos que el valor de pico de la señal triangular es Vp = 2 Vm (figura 11) (11) El error cometido será: (12) La sensibilidad de un voltímetro analógico en modo AC es menor que la sensibilidad en modo DC, tanto como el factor de forma, es decir, depende del tipo de rectificación que se emplee. (13) Figura 11 9 1.3 El polímetro digital El medidor electrónico digital se caracteriza por presentar su valor en una pantalla alfanumérica. Estos medidores presentan una serie de ventajas frente a los medidores a los analógicos: 1- La exactitud de los medidores digitales es mucho mayor que sus equivalentes analógicos. 2- Se presenta un único valor para su lectura. Dos observadores ven el mismo valor, los errores de paralelado de la aguja o de equivocación en la elección de las distintas escalas de la aguja es eliminado. 3- La presentación numérica del resultado acelera la lectura. 4- La precisión (repetitividad) es mayor conforme aumenta el número de dígitos. Los medidores digitales poseen ademas protecciones frente a la sobrecarga y la polaridad inversa. Ademas pueden tener escalas auto-rango. Los medidores digitales suelen clasificarse por el número de dígitos que presentan en su display, así pues, se suele hacer referencia a ellos como un polímetro de 3½ dígitos, 4½ dígitos o más. ¿Que quiere decir 3½ dígitos?. Quiere decir que el display del polímetro tiene tres dígitos que toman valores entre 0 y 9 (dígitos completos) y un dígito que solo toma dos valores (½ dígito) este dígito suele ser el más significativo, en cuyo caso toma únicamente los valores 0 y 1. En caso de ser el dígito menos significativo este dígito toma los valores 0 y 5. 1.3.1 Funcionamiento de los medidores digitales La base de los medidores digitales esta en la conversión de las magnitudes continuas (tensión, corriente) a una magnitud digital. La conversión analógico-digital (conversores A/D) se estudiará con detalle en cursos posteriores, sin embargo, vamos a dar aquí algunas nociones. La idea básica de la conversión es “tomar” una serie de muestras de la señal analógica a medir en determinados intervalos de tiempo. Figura 12 En la figura 12 podemos ver un ejemplo de digitalización de una señal y su posterior reconstrucción. 10 El primer paso de la digitalización de una señal es la toma de muestras (una muestra es el valor que toma la señal en un determinado instante de tiempo), a intervalos fijos de tiempo. El valor de estos intervalos tiene gran importancia, pues cuanto menor sean los intervalos mayor será la precisión y mejor será la reconstrucción, sin embargo, el volumen de información crece. Es necesario encontrar un equilibrio en el tamaño de estos intervalos. Existe un teorema (que será estudiado en cursos posteriores) que relaciona el ancho de banda de la señal con el máximo tamaño del intervalo para poder reconstruir la señal con exactitud. A continuación, las muestras tomadas son cuantificadas (se les asigna una valor dentro de un intervalo) es decir, si los intervalos de cuantificación van de 0,1 en 0,1 y una muestra tiene un valor de 1,67 se le asigna a esta 1,7. Este valor es el valor de la señal digital. En la figura 13 podemos ver un ejemplo de un circuito digitalizador de tensión. Figura 13 En la gráfica de la figura podemos ver como trabaja el conversor. Cuando llega la señal de comienzo, la señal de entrada es comparada con la salida del un conversor digital/analógico (DAC). La salida del conversor digital/analógico comienza en cero y es incrementada una unidad con cada pulso del reloj. Mientras que la entrada Vin sea mayor que la salida del DAC, el comparador produce una señal de salida que permite a la lógica de control que el pulso de reloj alimente al contador para que este pueda seguir incrementando su salida. En el momento que la salida del DAC es mayor que Vin, la salida del comparador cambia y la lógica de control detiene los pulsos de reloj que alimentan al contador. En ese momento la salida del contador representa la entrada Vin en formato digital. Una vez que el valor digital es obtenido el sistema es inicializado para comenzar una nueva cuenta. 1.3.2 Características de los medidores digitales. La precisión de un medidor digital es usualmente mayor que la de un medidor analógico, pero las especificaciones dadas por el fabricante pueden ser difíciles de entender. Hay tres conceptos que hacen referencia a la precisión del medidor digital, estos son resolución, error constante y error proporcional. La resolución hace indicación al número de dígitos del display. Error constante es el error que 11 permanece constante para todo el rango de medidas del instrumento. Este error se suele expresar en función del número de dígitos o como un porcentaje de error del rango de medidas del aparato. El error proporcional es un error que es proporcional a la magnitud medida, es expresado en función del porcentaje de la magnitud leída. La mayoría de los fabricantes expresan la precisión del medidor como combinación de los errores constantes y proporcionales. Por ejemplo, tenemos un medidor de 4 dígitos y el fabricante da una especificación ±0,01 % de lectura y ±1 dígitos de precisión, si la lectura obtenida es de 5,000 V el máximo error es de 0,01% de 5 + 0,001 V o 0,0015 V. Otra característica que diferencia a los medidores digitales frente a los analógicos, es que la magnitud básica medida es la tensión, así pues, el medidor básico digital es el voltímetro. Otras especificaciones adicionales que suelen dar los fabricantes acerca de los voltímetros digitales son: Impedancia de entrada. Es la impedancia con la que carga el voltímetro al circuito de medida. Al contrario del voltímetro analógico es independiente de la escala. Velocidad de lectura. Es el número de veces por segundo que el voltímetro es capaz de leer la tensión (hay que recordar que el voltímetro tarda un cierto tiempo en leer digitalizar y presentar la información). 1.3.3 Polímetros digitales Como hemos comentado, el medidor digital básico es un voltímetro, es decir, mide tensión (al contrario del medidor analógico). Es posible conseguir un amperímetro a partir de un voltímetro digital. Para ello basta introducir una resistencia R de valor conocido (figura 14). Figura 14 Medimos la caída de tensión en la resistencia y aplicando la ley de Ohm podemos conocer el valor de la corriente que circula por ella. Nos interesa que el valor de la resistencia sea lo menor posible a fin de disminuir el efecto de carga del amperímetro. 12 1.4 Utilización del amperímetro y el voltímetro. Hasta este momento hemos descrito el funcionamiento de estos aparatos, en este capitulo vamos a ver como se deben de emplear para realizar las medidas en un circuito. 1.4.1 Utilización del voltímetro El voltímetro mide la diferencia de potencial entre dos puntos, luego para utilizarlo deberemos colocarlo en paralelo con los puntos que queremos medir. Podemos ver esto en el ejemplo de la figura 15. Figura 15 En este ejemplo pretendemos medir la diferencia de tensión entre el punto B y el punto C, luego deberemos colocar el voltímetro en paralelo con dichos puntos. Parte de la corriente del circuito es desviada a través del voltímetro, lo que hace que la corriente que circula por la resistencia colocada entre los puntos B y C sea menor y, por consiguiente, la tensión que hay entre los puntos B, C con el voltímetro puesto será diferente a la que hay sin él, este efecto es lo que se conoce como efecto de carga del voltímetro. El voltímetro ideal es aquel que no toma corriente del circuito. Para que no circule corriente por un dispositivo habiendo una diferencia de tensión entre sus puntos es necesario que tenga una resistencia infinita, luego el voltímetro ideal se caracteriza por presentar una impedancia infinita. El voltímetro real precisa que la corriente que circule por él sea distinta de cero, lo que obliga a que su resistencia interna sea distinta de infinito. El voltímetro real lo podemos modelar como un voltímetro ideal con una resistencia en paralelo, esta resistencia se denomina resistencia interna o resistencia de carga del voltímetro. Figura 16 13 Colocar un voltímetro real para realizar una medida equivale a poner en paralelo, entre los puntos en los que queremos realizar la medida, una resistencia cuyo valor es el valor de la resistencia interna del voltímetro. Ejemplo En el circuito de la figura 17 calcular el error cometido al realizarla medida de la tensión entre los puntos A y B con el voltímetro de resistencia interna 1 MS. Figura 17 Si el voltímetro fuera ideal (no cargara el circuito) la tensión medida sería 10 V. Si embargo el voltímetro real introduce una resistencia de 1 MS. Luego la tensión medida sera: (14) El error cometido será (15) 1.4.2 Utilización del amperímetro El amperímetro mide la corriente que circula por una rama, por lo tanto debe de colocarse en serie con la rama donde se desea medir la corriente, es decir, se “introduce”dentro de la rama donde se desea medir (figura 18). El amperímetro ideal mede la corriente manteniendo una diferencia de tensión cero entre sus bornas. Esto implica que el amperímetro ideal deberá tener una impedancia interna cero. Es decir, 14 el amperímetro se debe de comportar como un cortocircuito cuando es conectado al circuito de test, de esta forma, no introduce modificación en el circuito. Figura 18 En la realidad, el amperímetro presenta siempre una pequeña resistencia interna, debida a los elementos utilizados en la construcción del amperímetro. El amperímetro real se puede modelar como un amperímetro ideal más una pequeña resistencia en serie que representa la resistencia interna (figura 19). Figura 19 Cuando colocamos un amperímetro real para realizar una medida corresponde a colocar una resistencia en serie en el punto donde hemos situado al amperímetro. Ejemplo Calcular el error cometido al medir la corriente con un amperímetro con una resistencia interna de 100 S en el circuito de la figura 20 A. Figura 20 15 La corriente que circula por la resistencia sin tener puesto el amperímetro será: (16) En la figura 20 B podemos ver como queda el circuito después de colocar el amperímetro real. En este caso la corriente medida será. (17) 1.4.3 Utilización del amperímetro como voltímetro Es posible utilizar un amperímetro para medir tensiones. De hecho, como hemos comentado anteriormente, los voltímetros analógicos están construidos a partir de un amperímetro. En la figura 21 podemos ver el esquema, donde a un amperímetro se le ha añadido una resistencia en serie de valor conocido. Figura 21 Si el amperímetro posee una resistencia interna Ri, aplicandola ley de Ohm la relación entre la tensión VM y la corriente I medida por el amperímetro vendrá dada por la ecuación 18. (18) 1.4.4 Utilización del voltímetro como amperímetro Un voltímetro puede ser utilizado para medir corrientes. Para ello colocamos una resistencia RP en paralelo con el voltímetro. En la figura 22 podemos ver el esquema. Si el voltímetro posee una resistencia interna Ri la resistencia interna total será: (19) 16 y la relación entre tensión y corriente será: (20) Figura 22 17 1.5 El Óhmetro Un óhmetro es un dispositivo que mide la resistencia que existe entre las dos bornas del instrumento. Existen varios métodos para medir una resistencia, pero todos ellos precisan una fuente que proporciona un estímulo (tensión y corriente) necesario para realizar la medida. Este estímulo proporciona una polaridad, que debe de tenerse en cuenta a la hora de medir componentes con resistencia asimétrica, ya que la medida será distinta según se coloquen las bornas. La fuente interna del óhmetro permite realizar la medida de un dispositivo sin necesidad de que este forme parte de un circuito, pero a su vez obliga a desconectar a los componentes de los circuitos donde éstos se encuentran montados para que las tensiones y corrientes presentes en los circuitos no interfieran con la medida. Los óhmetros miden la impedancia en modo DC (corriente continua). Intentar medir una impedancia AC es inexacto como por ejemplo intentar medir la impedancia de un altavoz, ya que esta impedancia esta expresada para tensiones AC y al intentar medirla con un óhmetro lo que se medirá será la impedancia de la bobina (muy cercana a 0 S). El óhmetro mide la resistencia de todo lo que exista entre sus bornas, así pues hay que tener cuidado al realizar la medida pues si se tocan con los dedos estaremos midiendo el valor de la resistencia del componente en paralelo con la resistencia que presenta el cuerpo humano, o si estamos midiendo un componente dentro de un circuito estaremos midiendo toda la resistencia paralelo de todos los componentes conectados entre esos dos puntos. El método más inmediato para medir una resistencia es el que se conoce como método voltímetro-amperímetro y consiste en utilizar una fuente con un voltímetro y un amperímetro (figura 23). Figura 23 El valor de la resistencia a medir RX se obtiene aplicando la ley de Ohm dividiendo la tensión medida por el voltímetro por la corriente medida por el amperímetro. Si el voltímetro y el amperímetro fueran ideales los circuitos A y B serían equivalentes, debido al efecto de carga de los aparatos el montaje A es preferible para valores de RX mucho menores que la resistencia de carga del voltímetro y el montaje B para valores de RX mucho mayores que la resistencia de entrada del amperímetro. Otro método de medir resistencia es el óhmetro serie, este esquema lo podemos ver en la figura 24 y es el utilizado por los polímetros analógicos. 18 Figura 24 Los valores de RS y VS son conocidos, luego la corriente que circula por la resistencia RX será (21) El valor de RS depende de la escala de medida. Observese que el valor IX no es directamente proporcional a la resistencia RX. Este tipo de óhmetro precisa un ajuste de cero en cada escala antes de realizar la medida. Este ajuste se realiza cortocircuitando las bornas de entrada y ajustando el valor de RS para que la aguja coincida con el cero de la escala. En este caso (22) El cero de la escala del óhmetro corresponde a la máxima deflexión de la aguja del galvanómetro, es decir, a la corriente a fondo de escala del galvanómetro. Al conectar una resistencia RX la deflexión D = IX/Ife será: (23) y la escala del óhmetro tendrá una apariencia similar a la figura 25. Figura 25 19 Otro método utilizado para medir resistencias es el método de la fuente de corriente. Este método, cuyo esquema podemos ver en la figura 26, es utilizado con los polímetros digitales. Utiliza una fuente de corriente constante cuyo valor depende de la escala. En este caso la tensión medida por el voltímetro es directamente proporcional a la resistencia V = ISRX. Figura 26 20 2 La fuente de alimentación 2.1 Introducción La misión de la fuente de alimentación es proporcionar la potencia, en forma de tensión y corriente, que los circuitos precisan para su funcionamiento. Diremos que una fuente es de tensión si mantiene una tensión constante entre sus bornas, independientemente de la corriente que suministra. De igual forma, diremos que una fuente es de corriente si suministra una corriente constante independientemente de la tensión que haya entre sus bornas. Las fuentes se pueden clasificar : Según el método utilizado para obtener la energía en: - Químicas (baterías y pilas). La tensión continua es obtenida a partir de reacciones químicas. - Electrónicas. La tensión continua se obtiene a partir de red eléctrica por medios electrónicos. Según el rango de la señal de salida de la fuente en: - Fijas. La señal a la salida es fija - Variables. La señal a la salida de la fuente se puede variar entre un cierto rango de valores. Según los métodos utilizados para disminuir la tensión de rizado en: - Reguladas. En ellas se aminora el efecto de rizado y las fluctuaciones mediante un circuito electrónico. - No reguladas. La fuente de alimentación utilizada habitualmente en un laboratorio de electrónica es electrónica, variable y regulada. En la figura 27 podemos ver el esquema de una fuente de alimentación electrónica regulada. Figura 27 21 2.2 Características de las fuentes de alimentación Las características de las fuentes de alimentación que se toman en cuenta para valorar la calidad de la fuente son: Margen de funcionamiento. Se denomina margen de funcionamiento al rango de tensiones y corrientes en los cuales la fuente se comporta como tal. El rango de tensiones será las tensiones comprendidas entre un valor mínimo y un valor máximo entre las cuales la fuente se comporta como fuente de corriente. Igualmente definimos como rango de corrientes a las corrientes comprendidas entre un valor máximo y un valor mínimo entre las cuales la fuente se comporta como una fuente de tensión. Los valores de tensión en una fuente ajustable se podrán regular entre un valor mínimo y un valor máximo de tensión, igualmente valores de corriente en una fuente de corriente ajustable se podrán regular entre un valor mínimo y un valor máximo de corriente. El valor mínimo de la corriente en una fuente de tensión es de 0 A (circuito abierto). Es normal que las fuentes reales presenten un comportamiento dual, es decir, entre ciertos limites se comporten como fuente de tensión y fuera de esos límites se comporten como fuente de corriente. Para explicar este concepto tomemos como ejemplo una batería de un coche, todas las baterías de los coches se comportan en principio como una fuente de tensión constante de 12 voltios, además, el fabricante de la batería indica otra característica y es el número de amperios que puede dar la batería (45, 55, 65 por dar algunos valores comerciales), esto quiere decir, que la batería se comportara como fuente de tensión siempre que la corriente suministrada por la fuente sea menor que el límite dado por el fabricante. Si por ejemplo colocamos una resistencia de 1 S entre las bornas de una batería de 55 A, la corriente suministrada por la batería será 12/1 = 12 A, si ahora colocamos una resistencia de 0.1 S la corriente que debería suministrar la batería para tener 12 V entre sus bornas debería de ser 12/0,1 = 120 A que es mayor que la corriente límite que es capaz de dar la batería, en este caso la batería se comportará como una fuente de corriente constante de 55 A y la tensión entre bornas de la batería será de 55 * 0,1 = 5,5 V. Este comportamiento lo podemos representar gráficamente (ilustraciones 28 y 29). En la figura 28 podemos ver el comportamiento de la tensión y la corriente en función de la resistencia puestas entre las bornas de la fuente, para R = 4 (circuito abierto) el valor de la corriente es cero. En la figura 29 a) podemos ver la relación I/V de una fuente de alimentación de laboratorio y en Figura 28 22 la figura 29 b) la misma relación para una batería, donde se aprecia una relación no lineal entre la tensión entre sus bornas y la corriente. En las fuentes de laboratorio normalmente pueden variar el valor de Ilim entre un cierto rango de corrientes. Figura 29 Tensión de rizado. La tensión de rizado es la señal alterna, no deseada, que tiene superpuesta la señal continua de salida. La fuente será tanto mejor cuanto menor sea su tensión de rizado. El fabricante suele dar el valor de la componente de rizado en función del coeficiente de rizado que es la relación en % del valor eficaz de la señal alterna superpuesta y la señal continua a la salida. Definimos como factor de rizado a la relación entre el valor eficaz de la componente alterna a la salida partido el valor de la tensión continua a la salida. (24) Figura 30 Resistencia interna. Como toda fuente real las fuentes de alimentación presentan una resistencia interna, que podemos definir como los incrementos de tensión producidos sobre un valor de continua y las variaciones de corriente. 23 (25) Estabilidad. La tensión a la salida de la fuente debe de mantenerse constante en el tiempo. En realidad la tensión a la salida de la fuente puede variar debido a factores tales como la humedad, temperatura, alimentación de la red, etcétera. Regulación de carga. En una fuente de tensión se producen variaciones de la tensión de salida al variar la corriente de salida por variaciones en la impedancia de carga. La regulación de la fuente intenta es un sistema de realimentación que intenta minimizar este efecto. La regulación de carga se estudiará con más detalle en próximos cursos. Fuentes Simétricas. La mayoría de las fuentes de alimentación del laboratorio son en realidad fuentes dobles, es decir, hay dos fuentes en la misma carcasa. Estas fuentes pueden funcionar como fuentes independientes, cada una con sus propios mandos. Sin embargo, para ciertas aplicaciones es necesario tener dos tensiones con el mismo valor absoluto y polaridad diferente con respecto a una borna común. Este tipo de tensiones simétricas se suelen lograr con las fuentes de alimentación dobles funcionando en modo simétrico. En este caso tenemos dos fuentes montadas sobre el mismo chasis y conectadas internamente, de manera que, al variar la tensión de una de las fuentes la tensión de la otra fuente varia en la misma proporción. Otra utilidad de las fuentes simétricas es poder tener una fuente que alcance un voltaje mayor, por ejemplo, tenemos dos fuentes que pueden trabajar en modo simétrico y que alcanzan un voltaje máximo de 20 voltios cada una, si las combinamos, tendremos una única fuente que puede alcanzar un voltaje máximo de 40 voltios. 24 3 El osciloscopio 3.1 Introducción La función primaria del osciloscopio es la dibujar en una pantalla una replica exacta de la formar de onda del voltaje en función del tiempo. Esta representación gráfica de la forma de onda puede ser utilizada para obtener información cuantitativa de la señal (amplitud y frecuencia). El osciloscopio también puede ser utilizado para comparar dos señales diferentes y medir su relación de frecuencias y tiempos. El osciloscopio presenta mucha más información que la que proporcionan el resto de los instrumentos habituales de un laboratorio de medidas eléctricas, por ejemplo, con un osciloscopio podemos determinar que parte de una señal corresponde a su componente continua, a su parte alterna, a ruido etcétera. Los bloques funcionales básicos del osciloscopio los podemos ver en la figura 31. Figura 31 25 3.2 Sección de presentación 3.2.1 El tubo de rayos catódicos El osciloscopio dibuja la gráfica proyectando y desplazando un haz de electrones sobre un recubrimiento fluorescente del interior del tubo de rayos catódicos. El tubo de rayos catódicos es básicamente una ampolla, donde se ha hecho un vacío elevado que posee en su interior un cayo de electrones que produce el haz de electrones que incide sobre la pantalla fluorescente y unos electrodos que permiten desviar el haz (figura 32). Figura 32 La desviación del haz de electrones es proporcional a la tensión aplicada a las placas horizontales y verticales. 3.2.2 Controles del cañon de electrones Entre los controles comunes se encuentran los de intensidad y enfoque; con menor frecuencia aparecen también los controles de localización y rotación de la traza. Enfoque. El haz de electrones es enfocado mediante una rejilla eléctrica en el interior del tubo, al variar la tensión sobre esta rejilla conseguimos enfocar el haz de electrones. El mecanismo de enfoque tiene un comportamiento análogo al mecanismo de enfoque de los sistemas ópticos (por ejemplo una lupa, la lente de cristal que al desplazarse permite enforcar un rayo luminoso en un punto más o menos estrecho), por ello al mecanismo de enfoque también se le denomina óptica electrostática. Figura 33 26 En la figura 33 podemos ver las tres posibilidades en el enfoque del haz, guardando la analogía con los sistemas ópticos, el primer dibujo corresponde a un sistema hipermétrope, el segundo sería un sistema miope, y el tercero un sistema correctamente enfocado. Intensidad. El control de intensidad ajusta el brillo de la traza, esto es necesario pues el osciloscopio puede ser utilizado en diferentes condiciones de luz ambiente y con muchas clases de señales. Por ejemplo, puede ser deseable cambiar la intensidad cuando se observan diferentes partes de las ondas cuadradas, ya que los componentes horizontales, más lentos, aparecerán siempre más brillantes que sus componentes verticales. Otra razón por lo que son útiles estos controles es porque la intensidad de la traza en la pantalla es función de la intensidad del haz de electrones y de la velocidad que tarda, este haz, en cruzar la pantalla. Al trabajar con diferentes velocidades de barrido varía el tiempo que tarda el haz en barrer la pantalla y por lo tanto el haz dispone de más o menos tiempo para excitar el recubrimiento fosforescente. El mecanismo de intensidad esta formado por una rejilla delante del cañon de electrones a la que se le somete a una tensión positiva. Figura 34 Conforme mayor sea la tensión positiva suministrada a esta rejilla menor será el flujo de electrones enviado a la pantalla y por lo tanto menor será la iluminación de la traza. Localizador del haz. El localizador del haz es un control que permite localizar el haz de electrones en cualquier momento en que se encuentre fuera de la pantalla. Cuando se acciona este control se reducen las tensiones de deflexión horizontal y vertical (de las que se hablará más adelante) y se elimina la acción del control de intensidad, de modo que el haz aparece siempre en el interior de la pantalla. Una vez visto el cuadrante de la pantalla en la que aparece el haz se sabe el sentido en el que se deben de desplazar los controles de posición para volver a llevar la traza al interior de la pantalla. Rotación de la traza. Permite alinear la deflexión horizontal de la traza con el retículo fijo. 3.2.3 La pantalla Hasta este momento hemos hablado acerca del tubo de rayos catódicos y de sus controles, ahora vamos a ver la pantalla. El funcionamiento de la pantalla es simple, esta está recubierta por una de sus caras por una película de material fosforescente, este material es excitado al incidir sobre él un haz de electrones, parte de la energía absorbida es convertida en luz, la cantidad de luz emitida es función de la energía cinética de los electrones y de la densidad del haz. El material fosforescente tiene una cierta persistencia, es decir, tarda un cierto tiempo en dejar de emitir luz una vez que este ha dejado de ser excitado por el haz. La parte de la pantalla que ve el usuario esta dividida pon un conjunto de lineas horizontales y verticales que se denominan retícula (figura 35). 27 Figura 35 Esta retícula permite estimar el valor de la tensión en un punto, ya que la desviación del haz es proporcional a la forma de onda de la señal a medir. 28 3.3 Sección vertical El sistema vertical le proporciona al sistema de presentación la información para el eje vertical (eje Y). El sistema vertical toma las tensiones de entrada y a partir de estas obtiene las tensiones de deflexión que son aplicadas a las placas horizontales del tubo de rayos catódicos. El sistema vertical también permite seleccionar la forma de conectar las señales de entrada (lo que se denomina acoplamiento). En la figura 36 podemos ver de forma esquemática las partes que componen la sección vertical. Figura 36 3.3.1 Sistema de acoplamiento. La mayor parte de los osciloscopios disponen de un conmutador de tres posiciones (en la figura 37 podemos ver su representación esquemática) que permite seleccionar el modo de entrada al osciloscopio de las señales a medir. Figura 37 29 Como se puede ver en la figura hay tres modos de funcionamiento, estos modos son: Modo DC. La señal de entrada es aplicada directamente a los circuitos del sistema vertical sin ninguna modificación. Por lo tanto la señal se transmite íntegra, es decir, tanto su componente continua como su componente alterna. Modo AC. Se intercala un condensador de gran capacidad entre las bornas de entrada y los circuitos del sistema vertical, por lo que la componente continua de la señal es eliminada, dejando pasar solo la componente alterna. En general la impedancia presentada por este condensador es depreciable, teniendo importancia únicamente a bajas frecuencias, donde puede aparecer una frecuencia de corte inferior debido a este condensador, frecuencia de corte que desaparece al medir en modo DC. Modo GND. En este modo la señal a visualizar queda en circuito abierto, aplicandose una tensión de cero voltios a los circuitos del canal En la figura 38 podemos ver una misma señal de entrada vista en los tres modos. Figura 38 3.3.2 Sistemas de atenuación y amplificación Los sistemas de amplificación y atenuación son un conjunto de circuitos que multiplican la señal aplicada a la entrada del osciloscopio por un factor " de modo que la señal aplicada a las placas de desviación sea "V. Este factor " puede ser variado del exterior mediante el mando de sensibilidad vertical. Este mando consta normalmente de dos ajustes, el primero tiene una variación discreta (a saltos) y esta calibrado en voltios/división estas divisiones hacen referencia a las divisiones que esta dividida la pantalla del osciloscopio. El segundo ajuste presenta una variación continua, con este mando podemos ajustar el factor de deflexión vertical entre cualquier valor comprendido entre dos valores discretos. Este mando de ajuste fino suele tener indicado una posición de calibrado (CAL), fuera de la posición de calibrado no conocemos el factor de deflexión, por lo que es imposible realizar medidas absolutas de tensiones, únicamente podremos realizar medidas relativas. Definimos como factor de deflexión vertical 30 Fv a la relación existente entre la tensión aplicada a la entrada del canal horizontal del osciloscopio y la deflexión que se aprecia en la pantalla. (26) El factor de deflexión vertical estará relacionado con el factor de deflexión de las placas y con el factor ". (27) Es posible que el mando de sensibilidad vertical posea un magnificador vertical. Este mando amplifica la señal presentada en pantalla por un valor fijo, habitualmente 10, de forma que si el mando de sensibilidad vertical está puesto en la escala de 2V/div. y está conectado el magnificador vertical, el valor de la escala será en realidad de 0.2 V/div. Ejemplo Queremos determinar el valor de la amplitud de la señal de la figura, si el mando de sensibilidad vertical esta colocado en 2v/div y el ajuste continuo esta en la posición CAL. Podemos ver que la gráfica de la figura 39 tiene una amplitud de 2 divisiones principales más dos subdivisiones secundarias. Cada una de estas subdivisiones vale 0.2 luego la amplitud de la señal será de 2.4 divisiones. Puesto que cada división vale 2 voltios la amplitud de la señal introducida al osciloscopio será 2 x 2.4 = 4.8 voltios. Figura 39 Vamos a repetir el proceso suponiendo que está conectado el magnificador x10. En este caso la división vale 0.2 V/división luego la amplitud de la señal es 0.2 x 2.4 = 0.48 V Otro mando que actúa directamente sobre los circuitos del sistema vertical es el mando de posición vertical. Este mando permite situar la traza en la pantalla en el punto que se desee, es decir, permite mover por la pantalla el punto de referencia (la traza que vemos cuando el mando de acoplamiento de entrada esta en GND) para ello suma una tensión de valor constante a la señal que se presenta en pantalla, el valor de esta tensión es lo que se varía con el mando de posición vertical. 31 3.4 El sistema Horizontal Para trazar una gráfica, el osciloscopio necesita tanto de datos horizontales como verticales. El sistema horizontal del osciloscopio proporciona la segunda dimensión, entregando las tensiones deflectoras que desplazan horizontalmente el haz de electrones sobre la pantalla. Las partes básicas del sistema horizontal las podemos ver en la figura 40. Figura 40 3.4.1 El generador de barrido La misión del generador de barrido es proporcionar una señal a las placas de deflexión horizontal, de tal manera que la señal vista en la pantalla del osciloscopio sea la representación de la señal introducida en el osciloscopio en función del tiempo. La señal que nos permite obtener esto debe de ser lineal, ya que al proyectar la señal de entrada del osciloscopio debemos de poder recuperar la señal original (figura 41). Figura 41 32 Así pues, el generador de barrido debe de proporcionarnos algún tipo de señal que presente una variación lineal. Este tipo de señal con variación lineal que nos proporciona el generador de barrido se denomina señal en diente de sierra (figura 42) Figura 42 Como podemos ver, en cada periodo de la señal en dientes de sierra distinguimos tres partes, la porción ascendente de la onda se denomina rampa y es cuando el osciloscopio “pinta” en pantalla la señal a visualizar, la parte descendente se denomina retraza, y es cuando se produce el retorno del haz de electrones desde el final de la pantalla (parte derecha) al principio de la pantalla (no hay que olvidar que el haz se comporta en cierta manera como un lápiz, por lo que una vez que ha terminado ha de volver al principio otra vez para seguir pintando), durante el periodo de retención no se realiza ninguna acción, permaneciendo el osciloscopio en espera. Figura 43 La relación entre distancia y tiempo en el eje X se puede controlar cambiando la pendiente de la rampa (figura 44). En esta figura podemos ver que al utilizar una señal de diente de sierra con distinta pendiente la señal visualizada en la pantalla del osciloscopio es distinta, se ha cambiando, pues, la escala de presentación del eje X en la pantalla (el valor de las divisiones es distinto). El valor de la pendiente lo podemos fijar desde el exterior mediante el mando de la base de tiempos. En el selector se indica la relación en tiempo/división. Al igual que el mando de sensibilidad vertical, el mando de la base de tiempos es un mando doble, donde uno de los mandos tiene un ajuste discreto (con una escala calibrada) y el otro mando tiene un ajuste continuo. Los valores de escala que indica la base de tiempos solo son correctos si se trabaja en la posición calibrada. La selección del modo calibrado se realiza con el mando de ajuste fino, llevando este control a la posición de calibrado, en caso contrario no se conoce de forma exacta 33 cual es la relación entre distancia y tiempo. El desplazamiento en el eje X es lo que se denomina barrido. Figura 44 Además del mando de la base de tiempos, otros controles que actúan directamente sobre el generador de barrido son el mando de posición, que permite desplazar la señal horizontalmente en pantalla y el magnificador horizontal que amplia la escala de presentación horizontal por un valor fijo. Para poder ver una señal estable en pantalla, deberemos pintar la señal en pantalla unas 25 veces por segundo, por ello deberemos repetir el trazado del haz por pantalla al menos 25 veces por segundo, para evitar que la luminosidad del material fosforescente decaiga más rápido que el ojo es capaz de integrar. Si se realiza el recorrido en pantalla con una velocidad menor se producirá un parpadeo en la imagen. Este efecto produce una de las limitación en el osciloscopio analógico, y es que las únicas formas de onda que podemos visualizar deben de ser periódicas. 3.4.2 El sistema de disparo El sistema horizontal proporciona la base de tiempos, sin embargo, es necesario saber cuando se Figura 45 34 debe de comenzar a dibujar la traza y cuando no. Para tener una señal estable en pantalla, la pendiente de la señal de dientes de sierra debe de empezar en el mismo punto (figura 45-a). Si la rampa de la señal en dientes de sierra no empieza siempre en el mismo punto de la señala visualizar (puntos señalados por las flechas en la figura 45-b), la señal visualizada en la pantalla del osciloscopio no será estable. El sistema encargado de determinar el “cuando” se dispara la rampa son los circuitos del sistema de disparo. Figura 46 En la figura 46 podemos ver el esquema del sistema de disparo y en la figura 47 podemos ver las señales a la salida de cada una de las etapas. Figura 47 35 El amplificador diferencial, que encuentra la señal a la entrada del circuito de sincronismo, tiene como misión determinar el punto de la señal de entrada en el cual se debe generar la señal de barrido (figura 48). El cometido de este circuito es establecer una señal de referencia continua de valor Vo voltios. Cuando la señal de entrada es igual a la tensión de referencia se “manda” una indicación. El valor de la señal continua de referencia se conoce como nivel de disparo. Este nivel se ajusta mediante un potenciómetro accesible desde la parte frontal del osciloscopio. También es posible cambiar la pendiente con la que disparamos la rampa (pendiente de subida Figura 48 o pendiente de bajada) mediante un conmutador. El schmitt-trigger es un circuito electrónico que tiene como misión transformar la señal de salida del diferencial en una señal cuadrada con flanco de bajada en el punto de disparo seleccionado. Esta señal cuadrada es diferenciada, obteniendo impulsos positivos y negativos en los flancos de subida y bajada de la señal cuadrada. Los impulsos positivos son eliminados quedando únicamente los pulsos negativos, que harán disparar al generador de dientes de sierra. De esta manera se consigue que el periodo de la señal de dientes de sierra sea un múltiplo o submúltiplo del periodo de la señal de entrada del osciloscopio, con lo que la señal visualizada en la pantalla del osciloscopio es estable. 3.4.3 Fuentes de sincronismo Como se ha visto anteriormente, es necesario una señal que actúe como fuente de sincronismo, es decir, es necesario una señal patrón de sincronismo. Normalmente se toma como fuente de sincronismo la señal de entrada al osciloscopio. En los osciloscopios de doble canal tenemos dos posibles fuentes de sincronismo, una por cada canal. Es posible conmutar de una a otra de las dos fuentes de sincronismo mediante un conmutador exterior y de esta forma seleccionar la señal que más interese para realizar la medida. Además de poder utilizar cualquiera de los dos canales de 36 entrada como fuente de sincronismo, los osciloscopios pueden utilizar una señal externa. Es lo que se conoce como sincronismo externo (external Trigger). Para ello el osciloscopio posee una entrada adicional además de las entradas de los canales, y mediante un conmutador podemos seleccionar que se utilice como fuente de sincronismo la señal presente en dicha entrada. 3.4.4 El modo X-Y En el modo de funcionamiento normal del osciloscopio la tensión aplicada al sistema horizontal es una señal en dientes de sierra. Sin embargo, puede haber situaciones en las cuales interese tener representada en la pantalla del osciloscopio una señal en función de otro tipo de señal distinto a la señal de dientes de sierra. Esto se consigue cuando el osciloscopio está funcionando en modo X-Y. En este caso se aplica a las placas de deflexión horizontal una señal externa. El modo X-Y permite conocer la relación de frecuencia y fase entre las dos señales. 37 3.5 Osciloscopios de doble canal La mayor parte los osciloscopios tienen, al menos, dos canales que pueden ser representados en la pantalla al mismo tiempo. Esto permite observar la relación existente entre dos señales, ademas de poder comparar sus respectivas amplitudes. Los osciloscopios de doble canal se pueden dividir, basandose en el principio de su funcionamiento, en: - Osciloscopios de doble haz. - Osciloscopios de doble traza. 3.5.1 Osciloscopios de doble haz Una de las maneras de conseguir esto es utilizar dos haces de electrones que son proyectados simultáneamente sobre la pantalla. Este tipo de osciloscopios se denomina osciloscopios de doble haz y tienen duplicados el juego de placas y un cañon de electrones capaz de generar dos haces independientes de electrones (técnica del haz dividido figura 49) o dos cañones independientes (figura 50). En la figura 51 podemos ver el diagrama de bloques de un osciloscopio de haz dividido. En principio, el tener un doble juego de placas tanto horizontales como verticales en el osciloscopio de doble haz le posibilitaría representar en pantalla señales de frecuencia diferentes, es decir, de dos bases de tiempo independientes. En la práctica el coste de disponer dos bases de tiempo independientes no justifica el coste de los circuitos adicionales, por lo que la principal diferencia entre los osciloscopios de doble haz y los de haz dividido, es que los primeros disponen controles de enfoque e intensidad de haz independientes. Figura 49 Figura 50 38 Figura 51 3.5.2 Osciloscopios de doble traza Este tipo de osciloscopios permiten observar dos señales independientes, pero su presentación en pantalla no se realiza simultáneamente. El tubo de rayos catódicos empleado con este tipo de osciloscopio es idéntico al empleado con un osciloscopio de un único canal, es decir, consta de un único juego de placas horizontales y verticales. La presentación en pantalla se consigue aplicando a las placas de deflexión vertical una de las señales de entrada durante un corto intervalo de tiempo y a continuación se conmuta y se le aplica la señal del otro canal de entrada durante otro corto intervalo de tiempo. El diagrama básico de este tipo de osciloscopios lo podemos ver en la figura 52. Figura 52 39 La correcta elección de los tiempos de conmutación, más la persistencia del fosforo de la pantalla del osciloscopio y la lenta respuesta del ojo humano a las transiciones rápidas (efecto integrador), hacen que, para el observador, las dos señales estén continuamente presentes en pantalla. Existen dos formas de control del conmutador electrónico: - Método Chopped o troceado. - Método Alternate o alternado. En el método chopped, el conmutador cambia entre los dos canales de entrada tan rápido como es posible, de forma que el tiempo asignado a cada canal es muy pequeño en comparación con el tiempo de barrido (figura 53). Como se puede observar, el haz dibuja un cierto número de trazos de cada una de las señales. Si la conmutación entre los dos canales es suficientemente rápida el efecto del troceado (exagerado en la figura) es inapreciable. Por esto este método funciona bien cuando la velocidad de barrido es mucho menor que la frecuencia de conmutación. Si el método chopped es utilizado con señales de alta frecuencia, y por lo tanto con velocidades de barrido elevadas, el efecto del troceado de las señales es apreciable en la pantalla del osciloscopio. Figura 53 40 En el método alternate las señales de los dos canales se van aplicado de forma alternativa a las placas de deflexión vertical durante un barrido completo. El conmutador es controlado, en lugar por un multivibrador que proporciona una señal cuya frecuencia es independiente de las frecuencias de las señales observadas, por el generador de barrido, que le proporciona una señal cuya frecuencia es la mitad de la señal de barrido. Figura 54 41 En este método se dibuja durante un ciclo de la señal de barrido una de las señales de entrada y durante el barrido siguiente la otra señal de entrada. El método alternate funciona bien siempre que la velocidad de barrido sea alta, de forma que la señal vuelva a ser “pintada” en la pantalla del osciloscopio antes de que la persistencia del fósforo disminuya, lo que dará el efecto visual de que hay dos señales permanentemente presentes en la pantalla. Si la velocidad de barrido es lenta se verá el parpadeo de las señales en la pantalla del osciloscopio, ya que el tiempo necesario para volver a mostrar en pantalla la señal es mayor que la persistencia del fósforo. Así pues, este método es adecuado para visualizar señales de alta frecuencia y que por lo tanto precisan velocidades de barrido elevadas. Una limitación del método alternate, no siempre presente en todos los osciloscopios, es la perdida de la diferencia de fase entre las dos señales que se pretenden medir en pantalla. En el método chopped la diferencia de fase entre las dos señales presentes en pantalla se conserva, y por lo tanto la podemos medir, pasando el eje de tiempos a grados, sin embargo, esto no es aplicable en el método alternate en todos los osciloscopios, aunque la mayoría de los osciloscopios modernos si conservan la relación de fase. La selección del método de visualización que deseamos, se realiza desde un conmutador externo y permite al usuario conmutar entre el método alternate y el método chopped en función de sus necesidades. 42 3.6 Impedancia de entrada y sondas Como todo aparato de medida, el osciloscopio presenta una impedancia de entrada distinta de infinito que provoca un efecto de carga sobre los circuitos donde se realiza la medida. El circuito equivalente de la impedancia de entrada del osciloscopio lo podemos ver en la figura 55. Figura 55 Como se puede ver en la figura, la impedancia de entrada del osciloscopio es de tipo capacitivo y resistivo. Para señales de frecuencia inferior a 5 KHz la componente principal es de tipo resistivo. La entrada del osciloscopio utiliza, normalmente, una conexión BNC. Para poder realizar medidas con el osciloscopio es necesario conectar esta entrada con el circuito a medir. Esto lo podemos realizar con un cable, pero esta conexión presenta desventajas ya que posiblemente el cable cargaría el circuito, ademas de actuar como antena, con lo cual captaría señales parásitas que se presentarían en pantalla superpuestas a las señales de interés. Para disminuir al mínimo este efecto se utilizará una sonda en lugar de un cable desnudo. Sin embargo, la utilización de la sonda produce otro efecto, y es la modificación de la impedancia de entrada del osciloscopio, con lo que se modifica su efecto de carga (figura 56, sonda atenuadora). Figura 56 43 En la tabla 1 podemos ver los distintos tipos básicos de sonda. Tipo Características Pasiva 1x, sensora de tensión No reduce la amplitud de la señal. Anchuras de banda limitadas 4-34 MHz. Alta capacidad de entrada 32-112 pF Pasiva atenuadoras 10x, 100x, 1000x, sensoras de tensión Atenúan las señales. Anchuras de banda hasta 300 MHz. Capacidad ajustable. Activas, FET, sensoras de tensión Atenuación seleccionable. Capacidad muy baja, . 1,5 pF. Más caras y menos resistentes. Margen dinámico limitado, anchuras de banda hasta 900 MHz. Mínima carga para el circuito. Sensoras de corriente Miden corrientes comprendidas entre 1 mA y 1000 A. Mínima carga del circuito Alta tensión Pueden manejar señales hasta 40 KV. Tabla 1. Cuando realizamos una medida el objetivo es minimizar el efecto de carga, con ese objetivo debemos escoger la sonda más adecuada. Así pues, para que el efecto de carga sea poco significativo, interesa escoger una sonda cuya impedancia sea al menos dos ordenes de magnitud mayor que la impedancia donde se va a realizar la medida (sondas de 1 MS para resistencias de 10 KS). Cuando se realizan medidas en alta frecuencia hay que prestar atención a los efectos capacitivos presentes a la entrada del osciloscopio. Un modo de disminuir el efecto de la capacidad de entrada del osciloscopio, ademas de aumentar la impedancia de entrada, es utilizar sondas atenuadoras. Con este tipo de sondas, en lugar de cargar al circuito con la capacidad de la punta de la sonda más la del cable más la de entrada del osciloscopio, la sonda atenuadora introduce una capacidad unas 10 veces inferior. El precio a pagar es la reducción de la amplitud de la señal. La capacidad de entrada de estas sondas es ajustable, a fin de poder compensar las variaciones en la capacidad de entrada del osciloscopio. El ajuste de la capacidad de la sonda es lo que se denomina compensación de la sonda. Para saber si una sonda esta correctamente compensada se utiliza una señal cuadrada (figura 57), y en función de la señal presente en pantalla podemos determinar si la sonda esta correctamente compensada. Otra característica que debe de tenerse en cuanta al utilizarlas es su ancho de banda. Las sondas, Figura 57 44 como los osciloscopios, presentan limitaciones en cuanto su ancho de banda. La combinación de sonda y osciloscopio da como resultado un ancho de banda distinto al de cada uno de los dos por separado. 45 3.7 El osciloscopio digital 3.7.1 introducción Como se ha visto, el osciloscopio analógico esta basado en el tubo de rayos catódicos. Sin embargo, el osciloscopio digital convierte la señal analógica en una señal digital (una serie de números binarios) que posteriormente puede ser mostrada en la pantalla o ser almacenada en una memoria. El poder almacenar los datos en una memoria significa que el osciloscopio es, de forma inherente, un sistema de almacenamiento, donde la señal puede ser almacenada digitalmente. Por ello, a los osciloscopios digitales también se les denomina osciloscopios de almacenamiento digital. El esquema básico de un osciloscopio digital lo podemos ver en la figura 58. Figura 58 Los circuitos de entrada del osciloscopio digital son similares a los del osciloscopio analógico. Sin embargo, la señal de salida de los preamplificadores es muestreada. La señal muestreada es a continuación cuantificada y almacenada en la memoria. El reloj de muestreo controla tanto al muestreador como al cuantificador, y la memoria permite conocer cuando las muestras fueron tomadas en el tiempo 3.7.2 La frecuencia de muestreo El muestreo consiste en tomar el valor de la señal a medir en determinados instantes de tiempo. Figura 59 46 De forma intuitiva podemos ver que cuanto mayor sea la velocidad de muestreo mejor será la representación que obtengamos de la señal. Sin embargo, no es posible trabajar a la velocidad de muestreo que queramos, pues el número de datos sería demasiado grande. En realidad se busca trabajar a la velocidad de muestreo más baja posible que permita obtener una buena representación de la señal. El teorema de Nyquist indica la velocidad de muestreo mínima: Según el teorema de Nyquist la velocidad de muestreo necesaria para poder representar una señal de 100 MHz de ancho de banda será: Los fabricantes sueles dar en las especificaciones de los osciloscopios digitales, ademas del ancho de banda, el número de muestras por segundo. El teorema de Nyquist da el límite teórico, en la practica si no se utilizan técnicas de muestreo periódico, la velocidad de muestreo debe de ser mayor que el límite teórico. (30) El valor de la constante kR teóricamente se aproxima a 2 pero en la práctica kR $ 2.5 (kR=2,5 para señales sinusoidales únicamente). Existen dos técnicas básicas de muestreo, el muestreo en tiempo real donde se toman todas las muestras en un único ciclo y permite capturar tanto las señales periódicas como las señales uniciclo y el muestreo repetitivo. Existen dos técnicas de muestreo repetitivo, la técnica de muestreo secuencia donde las muestras están tomadas a intervalos iguales y de forma secuencial (figura 60) y la técnica de muestreo repetitivo aleatorio (figura 61). Figura 60 Figura 61 El muestreo repetitivo solo se puede aplicar para la visualización de señales periódicas y el punto de disparo es estable (el intervalo entre dos instantes de disparo consecutivo es siempre el mismo). Puesto que la señal es repetitiva las muestras se toman sobre varios periodos de la señal (en lugar de un solo periodo), para poder realizar esto es necesario una base de tiempo estable. El muestreo secuencial toma una muestra en cada evento de sincronismo y se almacena en 47 memoria. Con cada evento se introduce un retardo adicional (figura 62). Con esta técnica se pueden digitalizar señales con una velocidad de muestreo mucho menor que la impuesta por el límite de Nyquist. Figura 62 En el muestreo aleatorio las muestras se adquieren en una secuencia aleatoria con respecto al lugar de la memoria en la que almacenan, los momentos en los que se adquirieron las muestras se recuerdan tomando como referencia el punto de disparo. Este tipo de muestreo presenta dos ventajas, en primer lugar como los puntos se toman con referencia al nivel de disparo se pueden obtener datos de los puntos anterior y posterior al instante de disparo (lo que no es posible con el muestreo secuencial). Ademas, se elimina el efecto debido a la inestabilidad del disparo ya que los datos se toman con referencia al nivel de disparo del mismo. 3.7.3 Cuantificación La señal muestreada debe de ser cuantificada para ser almacenada en memoria. La cuantificación consiste en asignarle un número binario (sucesión de “0” y “1”) a cada muestra. Al ser finito el número de bits utilizados para cuantificar cada muestra, se cometerá un error de resolución en la medida. La resolución de un osciloscopio digital puede cuantificarse fácilmente aplicando la siguiente expresión: (31) donde n es el número de bits utilizado en la cuantificación VRANGO es la escala de tensión donde se esta realizando la medida. Para comprender esto planteemos un ejemplo. Supongamos un osciloscopio con un rango de 10 Voltios y una resolución de 2 bits. Aplicando la expresión anterior la resolución del osciloscopio será: (32) Los rangos serán de 0 a 2,5, de 2,5 a 5, de 5 a 7,5 y de 7,5 a 10, si se dispone de más bits la escala se subdivide más. 48 A cada valor muestreado se le asigna un valor cuantificado. Figura 63 A todos los valores comprendidos en el intervalo de cuantificación se les asigna un valor cuantificado, por ejemplo, a todos los valores comprendidos en el intervalo de cuantificación de 4,25 a 6,75 se le asigna el valor 5. Así, por ejemplo, si el valor real de una muestra es 3, puesto que el valor esta comprendido entre 1,75 y 4,25, el valor que se le asigna es 2,5. El error debido a la resolución se suele indicar en %. En la tabla adjunta podemos ver los errores de resolución en % para distintos números de bits del cuantificador. bits Resolución 6 1,56% 7 0,78% 8 0,39% 9 0,20% 10 0,098% 11 0,049% 12 0,024% Tabla 2 49 4 Generadores de señal. 4.1 Introducción. La misión de los generadores de señal es proporcionar una señal (con una serie de características tales como frecuencia, amplitud, forma de onda y offset), a un circuito para poder realizar una batería de pruebas sobre él. La señal de salida proporcionada por el generador de señal puede ser únicamente una señal sinusoidal, en este caso se le denomina oscilador. Otros tipos de generadores proporcionan varios tipos de forma de onda (señales triangulares, cuadradas, sinusoidales, etcétera) permitiendo, además, cambiar características de la señal tales como frecuencia o amplitud. 4.1.1 El modelo circuital. El esquema eléctrico del circuito equivalente de un generador de señal es un generador real y lo podemos ver en la figura 64. El valor de la resistencia de salida es, normalmente, 50 S, 75 S o 600 S. Cuando se diseña el generador se asume que este va a estar conectado a una impedancia cuyo valor es igual al de su impedancia de salida. En estas condiciones se consigue que la fuente entregue la máxima potencia. Figura 64 Ejemplo. Calcular la potencia entregada por un generador de señal con una impedancia de salida de 50S y una tensión en vacío de 6 Voltios eficaces a una carga de 50 S y a una carga de 75 S. La tensión en la carga de 50 S es: (33) La potencia entregada será: (34) en el caso de la carga de 75 S la tensión es: 50 (35) La potencia entregada será: (36) 4.1.2 Modelo circuital con offset. El offset es una tensión continua que se suma directamente a la señal de salida. Normalmente el valor de esta componente continua se puede fijar mediante un mando presente en el generador de señal. En este caso el modelo circuital lo podemos ver en la figura 65 Figura 65 4.1.3 Salidas flotantes y salidas referenciadas a tierra. Las bornas de salida del generador de funciones pueden ser flotantes (figura 66 A) o referenciadas a tierra (figura 66 B), en este caso una de las dos bornas de salida del instrumento esta conectada al chasis del aparato y a través de este a la toma de tierra del cable de alimentación. Algunos instrumentos permiten, mediante interruptores, seleccionar la salida en bornas flotantes o referenciadas a tierra. La salida en bornas flotantes es más versátil simplificando las técnicas de medida, sin embargo, este tipo de aparatos suelen presentar problemas a altas frecuencias. Figura 66 51 4.2 Características de los generadores de señal Los generadores de señal no son perfectos, sino que, presentan una serie de imperfecciones que van a caracterizar su funcionamiento. 4.2.1 Precisión en el ajuste de la frecuencia La precisión en el ajuste de la frecuencia hace referencia a la diferencia entre la frecuencia de salida del generador y la que este marca en su panel frontal. Si el generador de señal proporciona una señal sinusoidal y la representamos en el dominio de la frecuencia tenemos una señal con una única componente, el error cometido en el ajuste produce un desplazamiento horizontal de dicha componente (figura 67). Figura 67 4.2.2 Estabilidad de la frecuencia La frecuencia de salida del generador puede variar con el tiempo, esto conlleva que el error cometido al ajustar la frecuencia no sea constante en el tiempo. La variación temporal de la misma es, normalmente, lenta, sin embargo, en determinadas circunstancias se producen rápidas variaciones de la frecuencia de salida. De esta manera tenemos a la salida una señal modulada en frecuencia, esta variación rápida de la frecuencia de salida no se clasifica como estabilidad de frecuencia y se le denomina frecuencia residual de modulación. La estabilidad de frecuencia es expresada en porcentajes o en partes por millón (ppm). 4.2.3 Precisión en la amplitud Es la precisión para fijar la amplitud de salida del generador mediante los mandos de ajuste de amplitud de la señal de salida. Algunos instrumentos no tienen especificada su precisión en el ajuste de la amplitud, sino que especifican los limites de la variación máxima de la amplitud de salida a una determinada frecuencia (normalmente la frecuencia de salida máxima del aparato). Una vez fijada la amplitud de salida, esta permanece dentro de los límites indicados a cualquier frecuencia de salida. 52 4.2.4 Distorsión La señal obtenida a la salida puede que no tenga error ni de amplitud ni de frecuencia, pero puede tener una fuerte distorsión. Llamamos distorsión a cualquier imperfección que posea la señal obtenida cuando la comparamos con la señal deseada. En el caso de señales sinusoidales la distorsión muestra en el dominio de la frecuencia una serie de armónicos no deseados, en este caso se esta hablando de distorsión armónica. En la figura 68 podemos ver una distorsión armónica, donde una señal sinusoidal pura de frecuencia f aparece acompañada de una serie de componentes sinusoidales de menor amplitud a frecuencias que son múltiplos enteros de la frecuencia de la señal original. Figura 68 4.2.5 Espúreos El generador de señal puede proporcionar a la salida una serie de componentes de baja frecuencia, estas componentes no están relacionadas con la frecuencia de la señal de salida y se les denomina espúreos. Tienen su origen en el método utilizado por el generador para obtener la señal de salida. Además, puede aparecer a la salida una componente inducida por la linea de alimentación, ya que al ser una señal alterna (en Europa es una señal sinusoidal de 50 Hz) esta señal se induce directamente a la salida o aparece como una señal moduladora (induce variaciones periódicas de amplitud a la señal de salida). 4.2.4 Impedancia de salida Como todo generador real los generadores de señal presentan una impedancia de salida. 53 4.3 Clases de generadores de señal 4.3.1 El generador sinusoidal El generador sinusoidal únicamente proporciona una señal sinusoidal a la salida. Este tipo de fuentes se caracterizan por ser instrumentos de bajo coste que generan una señal, en un rango de frecuencias que va desde unos pocos hercios hasta 1 MHz con un bajo grado de distorsión. Internamente están basados en un oscilador que opera a la misma frecuencia que la señal de salida. Este tipo de generador es usado principalmente para trabajar en las frecuencias de audio. En la figura 69 podemos ver el esquema de un generador sinusoidal. Figura 69 4.3.2 El generador de Funciones Este tipo de generador de señal es el más utilizado. Es capaz de proporcionar a la salida señales sinusoidales, triangulares y cuadradas. Además, dependiendo del aparato, es capaz de proporcionar a la salida una señal modulada en frecuencia o amplitud. El esquema básico de un generador de funciones lo podemos ver en la figura 70, este está formado por un oscilador libre que proporciona una señal triangular de la misma frecuencia que la señal de salida, para obtener otros tipos de señal distintos de la señal triangular se la hace pasar por una serie de circuitos que la convierten en la forma de señal deseada. Figura 70 54 5 Bibliografía. R. A. Witte, “Electronic Test Instruments”, Ed. Prentice Hall P T R, 1993. C. González Bris, “Manual de Laboratorio De Medidas Eléctricas”, Departamento de reprografía de la E. T. S. I. Telecomunicación, Universidad Politécnica de Madrid, 1996. N. C. Barford, “Experimental Measurements: Precision, Error and Truth” (2ª Ed.), John Wiley & Sons, 1985. 55