Nuevo Compensador Activo Basado en la IEEE Std. 1459
Anuncio

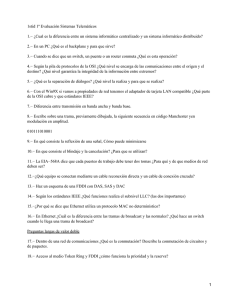
38 IEEE LATIN AMERICA TRANSACTIONS, VOL. 4, NO. 1, MARCH 2006 Nuevo Compensador Activo Basado en la IEEE Std. 1459 S. Orts, F. J. Gimeno-Sales, A. Abellán, S. Seguí-Chilet, M. Alcañiz y R. Masot Resumen—La norma IEEE Std. 1459-2000 establece que en un sistema eficiente solo deberá estar presente la potencia activa fundamental de secuencia directa, considerándose como no eficientes el resto de potencias. Este artículo propone la obtención de las corrientes de referencia para el control de un compensador activo de potencia basado en la IEEE Std. 1459. Con el fin de validar los resultados teóricos que se presentan, se ofrecen resultados de simulación para un compensador activo paralelo que compensa las ineficiencias introducidas por una carga mixta de 7kVA compuesta por tres rectificadores monofásicos y tres cargas lineales desequilibradas conectadas a una instalación trifásica a cuatro hilos. El control de la corriente de salida del inversor propuesto utiliza un regulador de corriente más un modulador vectorial espacial tridimensional. El inversor trifásico utilizado está formado por tres semipuentes y barras DC partidas. Palabras clave—Active Compensation, Active filters, IEEE Standard 1459 – 2000, Power Quality, Three-phase VSI Inverters, SVPWM. I. INTRODUCCIÓN a utilización de compensadores activos para la mejora de los sistemas eléctricos ha sido ampliamente estudiada y desarrollada en las últimas décadas [1]. El objetivo fundamental de un compensador activo es la mejora de la eficiencia del sistema eléctrico al que se conecta, aguas arriba del punto de conexión del compensador a la instalación eléctrica (punto de conexión común o pcc). La utilización de compensadores activos paralelo está más indicada en sistemas de distribución eléctrica en baja tensión. Este tipo de compensadores activos actúa generando las corrientes no eficientes que demandan las cargas, evitando así que dichas corrientes circulen por el resto del sistema eléctrico de distribución y aumentando la capacidad del mismo para transportar energía útil. Es posible encontrar en la bibliografía dos modos de trabajo diferentes para el compensador activo: L x Modo factor de potencia unitario o UPF (Unitary Power Factor): el compensador intenta que las corrientes antes del pcc estén en fase y tengan la misma forma que las tensiones de la red eléctrica en dicho punto, lo que equivale a que el conjunto del compensador más carga se comporta como una carga resistiva equilibrada de igual valor en las tres fases. _____________________________ S. Orts, F. J. Gimeno-Sales, S. Seguí-Chilet, M. Alcañiz y R. Masot pertenecen al Instituto de Tecnología Eléctrica, Universidad Politécnica de Valencia, España. (salvador.orts; fjose.gimeno; salvador.segui; miguel.alcaniz; rafael.masot @itenergia.com) A. Abellán pertenece al Departamento de Ingeniería Electrónica, Universidad Politécnica de Valencia (aabellan@eln.upv.es) x Modo absorción de corriente senoidal o SRF (Sinusoidal Reference Frame): el compensador activo no tiene en cuenta la forma de las tensiones en el pcc y trata de conseguir que las corrientes antes del mismo sean senoidales, equilibradas y de frecuencia fundamental. Se consideran corrientes ineficientes las provocadas por los fenómenos que no representan una transferencia de energía útil entre generador y carga. Estas corrientes son causadas por los fenómenos no eficientes de desfase, desequilibrio y distorsión armónica. Los flujos de energía asociados a estos fenómenos provocan un aumento de las pérdidas energéticas en el sistema eléctrico por lo que pueden denominarse flujos de energía no eficiente. Existen diferentes teorías de la potencia eléctrica que cuantifican los fenómenos de potencia útil y potencias debidas a los fenómenos no eficientes. Cualquiera de ellas puede servir como base matemática para la obtención de las corrientes de referencia de un compensador activo [2]. A partir de los estudios llevados a cabo por el “IEEE Working Group in Non-sinusoidal Situations” [3] apareció en el año 2000 la IEEE Std. 1459 [4]. En ella se establecen las nuevas definiciones para la medida de las diversas potencias eléctricas bajo condiciones senoidales, no senoidales, equilibradas o desequilibradas. La IEEE Std. 1459 es aplicable en equipos de medida de redes eléctricas, suministrando información para penalizar al usuario por el consumo de potencias no eficientes. La IEEE Std. 1459 considera solo potencia útil o eficiente a la potencia activa fundamental y de secuencia directa, que es la única que se transforma en otro tipo de energía aprovechable. Las potencias activas debidas a la distorsión armónica y a las componentes fundamentales de secuencia inversa y homopolar se consideran residuales y se engloban junto con el resto de ineficiencias, puesto que no transportan energía útil a la carga y se transforman en pérdidas en el sistema eléctrico. El diseño de un compensador activo teniendo en cuenta las definiciones incluidas en la IEEE Std. 1459 deberá utilizar la tensión de secuencia directa V1+ en el punto de conexión como referencia para el cálculo de las corrientes de compensación del sistema [5]. Tras la compensación, el conjunto formado por la carga y el compensador activo alcanza la máxima eficiencia solo cuando se consume del sistema eléctrico la corriente senoidal fundamental en fase con V1+, es decir, la corriente activa fundamental de secuencia directa I1a+. El compensador actuará por tanto en un modo absorción de corriente senoidal o SRF. ORTS et al.: NEW ACTIVE COMPENSATOR BASED ON 39 El artículo se ha estructurado describiendo en la siguiente sección las definiciones más importantes de la IEEE Std. 1459 que son de interés para el diseño del compensador activo propuesto o para evaluar su correcto funcionamiento. En la tercera sección se describe el compensador activo propuesto, el método utilizado para determinar las corrientes de referencia del compensador y la técnica de modulación vectorial espacial propuesta para controlar un inversor VSI de tres ramas y barras DC partidas para la conexión del terminal neutro. La sección cuarta presenta los resultados obtenidos mediante simulación con Matlab/Simulink para unas condiciones determinadas de trabajo en la instalación eléctrica que incluye todos los tipos de fenómenos no eficientes analizados en IEEE Std. 1459. II. LA IEEE STD. 1459. La IEEE Std. 1459 aparece en el año 2000 para mejorar a la antigua IEEE Std. 100, demostrando que las definiciones de esta última solo producen resultados correctos cuando las tensiones y corrientes son senoidales y la carga está equilibrada. Ejemplos de algunas situaciones que producen errores con las definiciones antiguas se pueden encontrar en [4] y [6]. La IEEE Std. 1459 se basa en la definición de potencia efectiva de Buchholz, Se, y en la descomposición de la misma en diferentes potencias relacionadas con los fenómenos físicos que aparecen en los sistemas eléctricos trifásicos. La potencia aparente efectiva Se se define: Se 3Ve I e . (1) La tensión efectiva Ve y la corriente efectiva Ie se definen en (2) y (3) respectivamente, pudiéndose descomponer en sus términos fundamentales (Ve1 e Ie1) y armónico (VeH e IeH). Estas definiciones y su descomposición se basan en [4]. Ve2 3Va2 Vb2 Vc2 Vab2 Vbc2 Vca2 18 I e2 I 2 a I b2 I c2 I n2 / 3 2 Ve21 VeH 2 I e21 I eH (3) S S 2 e1 S 2 eN 9V V 2 e1 2 eH I 2 e1 I 2 eH , (4) atendiendo a la frecuencia de las tensiones y corrientes que originan los fenómenos energéticos, la Se se puede separar en dos términos: x La potencia aparente efectiva fundamental Se1, que incluye el fenómeno de transferencia de energía útil y los fenómenos no eficientes debidos a desfases y desequilibrios. x La potencia aparente efectiva armónica SeN, relacionado con el fenómeno de la distorsión armónica, asociado a la S S 2 1 S e21 U1 2 , (5) la potencia aparente de secuencia directa S1+ y la potencia de desequilibrio fundamental SU1, que refleja el desequilibrio del sistema en tensiones y corrientes. S1+ incluye los términos de potencia activa fundamental de secuencia directa P1+ P1 3V1 I 1 cosT 1 3V1 I a1 , (6) que representa el fenómeno de transferencia de energía útil, y la potencia reactiva fundamental de secuencia directa Q1+ Q1 3V1 I 1 sin(T 1 ) , (7) que representa el fenómeno de desfase, siendo T1 la diferencia de fase entre la componente fundamental de la tensión de secuencia directa y la corriente de secuencia directa. La potencia aparente efectiva armónica SeN se descompone en tres términos: 3Ve1 I eH 2 3VeH I e1 2 3VeH I eH 2 2 S eN 2 S eN 2 2 DeI2 DeV S eH (8) Donde DeI es la potencia aparente efectiva de distorsión de corriente, DeV es la potencia aparente efectiva de distorsión de tensión y SeH es la potencia aparente efectiva armónica. Los factores de distorsión armónica total de tensión THD eV V eH / V e1 (9) THD eI I eH / I e1 (10) y de corriente (2) En la expresión de la corriente efectiva se ha considerado que la resistencia de la línea es igual a la resistencia del conductor neutro. La Se representa el conjunto de todos los fenómenos físicos que se producen en el sistema eléctrico. En una primera descomposición 2 e existencia de componentes de tensión y corriente de frecuencia distinta de la fundamental. La Se1 se puede separar en dos términos se definen como el cociente entre el valor eficaz de las componentes armónicas y el valor eficaz de la componente fundamental. El factor de potencia PF PF P / Se (11) y el factor de potencia efectivo fundamental de secuencia directa PF1+ PF1 P1 / S1 (12) permiten cuantificar la eficiencia del sistema eléctrico. Siendo P la potencia activa del sistema trifásico P 1 kT W kT ³W > p t p t p t @dt , R S T (13) definida como la suma de los valores medios de las potencias instantáneas de cada fase, siendo T es el periodo de la señal, k es un número entero y W es el momento donde se inician las medidas. Estas definiciones permiten el diseño de nuevos sistemas de medida y establecen nuevos criterios para tarifación que 40 IEEE LATIN AMERICA TRANSACTIONS, VOL. 4, NO. 1, MARCH 2006 evalúan tanto la calidad de las instalaciones del usuario como el impacto sobre las redes eléctricas de distribución. IEEE Std. 1456 establece que las instalaciones eficientes deberán consumir de la red eléctrica únicamente la potencia activa fundamental de secuencia directa P1+, es decir, solo deberán circular por las líneas las corrientes activas de secuencia directa fundamental I1a+. P1 RED ELÉCTRICA pcc CARGA TRIFÁSICA S eN S e1 P1 COMPENSADOR ACTIVO III. DESCRIPCIÓN DEL SISTEMA DE Fig. 2. Flujos de potencia en un sistema compensado según IEEE Std. 1459. COMPENSACIÓN Como consecuencia de la aplicación de IEEE Std. 1459, el control de los compensadores activos deberá modificarse convenientemente para reducir los efectos de las ineficiencias en los sistemas eléctricos, adaptándose a las nuevas especificaciones de este estándar. El compensador activo deberá conseguir que el conjunto formado por la carga y el propio compensador consuman únicamente la corriente activa fundamental de secuencia directa I1a+, de forma que el conjunto se comporte como un sistema de máxima eficiencia. El compensador activo propuesto actúa como un sistema de tres fuentes de corriente controladas e independientes y se ha implementado mediante un inversor trifásico de tres ramas y barras DC partidas, utilizando una modulación vectorial espacial o SVPWM. El diagrama de bloques del compensador activo propuesto se muestra en la Fig. 1. Durante el análisis del circuito se considera una inductancia de salida del inversor con una resistencia serie. No se consideran resistencias de línea y neutro entre el compensador y la carga dada su proximidad. Punto de Conexión Común (pcc) R S T N Generador (Red Eléctrica) iR iS iT iN iDC VDC C1 iN A Inversor Trifásico N C2 iA + VDC B RLA LA SA iB RLB LB iSc iC RLC LC iTc C SC VDC + VDC iA iB iC (estrella / triángulo) N & & & 1 / 3 I Rc1 aI Sc1 a 2 I Tc1 G iTc Fig. 1. Diagrama de bloques del compensador propuesto. Obtención de las corrientes de referencia. A partir de las definiciones establecidas en IEEE Std. 1459, la única potencia útil en un sistema o instalación eléctrica es la potencia activa fundamental de secuencia directa P1+ (6). Las corrientes que suministra el compensador activo en sus tres salidas (iA, iB, iC) son las que circulan por la carga sin contribuir a P1+. Solo la I1a+ contribuye a la P1+. La corriente del neutro de la carga iNc circula hasta el punto medio de las barras DC partidas. La Fig. 2 muestra las potencias en un sistema compensado de forma continua mediante un compensador activo a partir de las definiciones establecidas en IEEE Std. 1459. (15) P1 3V1 , 2 (16) que representa la admitancia de una resistencia que consume la misma potencia activa fundamental de secuencia directa que una fase de la carga. La I1a+ se expresa utilizando la admitancia equivalente G: I a1 iRc iSc Para obtener las corrientes de referencia del sistema, se define la admitancia equivalente por fase G vR vS vT vN Cálculo de corrientes de referencia, compensador de error y modulador (3D 3B SVPWM) A. & I 1 Carga trifásica - SB iRc iNc Señales de conmutación Para calcular P1+ (6), se deben obtener las componentes de frecuencia fundamental de las corrientes de carga (IRc1, ISc1, ITc1) y de las tensiones en el pcc (VR1, VS1, VT1). Mediante las etapas de sensado correspondientes se obtienen dichas magnitudes y se les aplica la transformada discreta de Fourier (DFT) para el armónico fundamental en cada una de las fases, obteniendo las magnitudes en formato módulo y argumento. Aplicando la transformada de Stokvis – Fortescue a las componentes de frecuencia fundamental se pueden obtener las componentes simétricas de las tensiones de alimentación y de las corrientes de carga. La obtención de la tensión fundamental de secuencia directa V1+ se expresa en (14), mientras que en (15) se presenta la obtención de la corriente fundamental de secuencia directa I1+, con a e j2S / 3 . & & & & (14) V1 1 / 3 VR1 aVS 1 a 2VT 1 GV1 . (17) Esta es la única componente de la corriente que debe ser suministrada por el generador al sistema eficiente formado por el conjunto carga más compensador activo. Las corrientes de referencia para el compensador activo se obtienen en (18), (19) y (20) restando las corrientes eficientes (corriente de secuencia directa activa en cada fase) a las corrientes demandadas por la carga trifásica. i A _ ref t i Rc t G 2V1 sin(Z t D 1 ) i B _ ref t i Sc t G 2V1 sin(Z t D 1 2S / 3) i C _ ref t iTc t G 2V1 sin(Z t D 1 2S / 3) (18) (19) (20) Donde D1+ es el desfase de la V1+ respecto a la referencia de ángulos elegida, que es el paso por cero de la tensión en la fase R respecto del neutro en el pcc. Las corrientes obtenidas a ORTS et al.: NEW ACTIVE COMPENSATOR BASED ON 41 la salida del inversor, proporcionales a las de referencia, representan todos los fenómenos no eficientes definidos en IEEE Std. 1459 en cualquier situación del sistema trifásico (senoidal, no senoidal, equilibrado o desequilibrado). Cuando el compensador activo suministra estas corrientes, el conjunto formado por la carga y el propio compensador activo solo absorbe corriente fundamental de secuencia directa en fase con la componente fundamental de secuencia directa de las tensiones en el pcc, obteniéndose la máxima eficiencia en el sistema eléctrico (Se = P1+ y PF=1). B. Regulador de corriente. Una vez obtenidas las corrientes de referencia se implementa el lazo de regulación de corriente que debe conseguir que las corrientes suministradas por el compensador sigan a las corrientes de referencia. En [7] se presenta una revisión de los métodos actuales de control de corriente para convertidores PWM. A partir del esquema de la Fig. 1 se puede obtener la ecuación del circuito para cada una de las fases de salida del inversor (21). Se va a mostrar el método propuesto para el diseño del regulador de corriente para la fase A siendo exactamente igual para las otras dos fases con solo cambiar los subíndices correspondientes a cada fase en las siguientes expresiones. LA di A (t ) dt R LAi A (t ) v A (t ) v R (t ) (21) El error de corriente HiA H i (t ) i A _ ref (t ) i A (t ) (22) A se define como la diferencia entre la corriente de referencia y la corriente medida por la salida del inversor. Despejando iA(t) de (22) y despreciando RLA por su pequeño valor, (21) se puede escribir: LA dH i A ( t ) dt v A (t ) v R (t ) L A di A _ ref (t ) . dt (23) Para frecuencias de muestreo elevadas (fm 10kHz), se puede decir que la variación de la derivada del error es prácticamente lineal, pudiéndose cambiar la derivada por el incremento del error: dH i A dt | 'H i A . (24) 't Así mismo, para pequeños rizados de las corrientes de salida del compensador, el incremento del error de corriente es prácticamente igual al error de corriente: 'H i A (25) | H iA f m . 't Teniendo en cuenta todas estas aproximaciones se puede escribir: v A (t ) L A f m H i A v R (t ) L A di A _ ref (t ) . dt (26) La estrategia de control propuesta consiste en aplicar unas tensiones en las salidas del lado de alterna del inversor (vA, vB, vC) que, corregidas por las tensiones de línea y por las derivadas de la corriente de referencia, consiga que se cumpla en todo momento la ecuación (26). Con la ecuación (26) y las equivalentes para las fases B y C se calculan las tensiones de referencia que utilizará el modulador SVPWM para la generación de las señales de disparo del puente inversor [8]. C. Modulador 3D – 3B SVPWM. Existen métodos de control de corriente que consiguen realizar de forma conjunta la función de regulación de la corriente y la función de modulación del inversor. Son los denominados controladores tipo on-off o no lineales. Ejemplos de este tipo de controladores son los controladores por banda de histéresis o los controladores sigma-delta. Cuando el control de corriente se realiza mediante un regulador lineal (tipo PI por ejemplo), es necesario utilizar un modulador que trabaje de forma independiente al regulador. De entre las técnicas de modulación que trabajan a partir de controladores de corriente lineales, las más importantes son la modulación senoidal o SPWM y la modulación vectorial espacial o SVPWM. Las ventajas que proporciona el modulador SVPWM son bien conocidas por su gran aplicación en el control de motores trifásicos de inducción. La ampliación de la zona de trabajo lineal y un mejor aprovechamiento de las barras DC son sus principales virtudes. Su aplicación a sistemas de compensación activos implementados mediante inversores VSI de cuatro ramas ya ha sido estudiada [9], sin embargo, su aplicación no está tan extendida cuando se trata de compensadores activos implementados mediante inversores VSI de tres ramas. La utilización de una topología con tres semipuentes permite utilizar los puentes inversores trifásicos que se desarrollan para el control de motores AC. Al ser uno de los mercados más importantes de la Electrónica de Potencia, los fabricantes incorporan, con un precio muy competitivo, nuevas prestaciones en estos dispositivos: etapas de disparo, sistemas de protección, sensado de corrientes y temperatura, aislamiento entre control y potencia, semiconductores de última tecnología, etc. El compensador propuesto aplica una modulación SVPWM para un inversor VSI de tres ramas y barras DC con toma media (sistema trifásico a cuatro hilos), denominada 3D 3B SVPWM (Three Dimensional Three Branches Space Vector Pulse Width Modulation). La principal diferencia entre un inversor VSI trifásico para la compensación activa de ineficiencias y uno que realiza el control de un motor trifásico es que las corrientes de salida del inversor no tienen porqué ser equilibradas en el caso de un compensador activo y, por lo tanto, el sistema de tensiones a aplicar por el inversor para realizar la compensación tampoco tienen porqué ser equilibrado. Esto provoca que en un sistema de coordenadas ortogonal, como el de Clark o Scott, la representación del vector de tensiones de referencia no quede sobre el plano D-E sino que podrá estar en cualquier lugar del espacio tridimensional D-E-0. En un instante determinado, las tres tensiones de referencia 42 IEEE LATIN AMERICA TRANSACTIONS, VOL. 4, NO. 1, MARCH 2006 calculadas se pueden representar en el sistema de coordenadas D-E-0 mediante un vector espacial de coordenadas & V * vD* , vE* , v0* que representa las tensiones a generar a la > @ salida del inversor. Para un inversor trifásico de tres ramas y barras DC partidas, como el de la Fig. 3, existen ocho posibles combinaciones de los interruptores de potencia. Son los vectores de conmutación del inversor o vectores directores. iDC SAp + VDC 2 V7 SCp SBp iA A - N + determinan las bases. Estos ocho vectores son los únicos que puede generar el inversor VSI de tres ramas y, por tanto, la generación de un vector de tensión igual al de referencia se obtendrá por combinación de estos vectores de conmutación. El vector de referencia se construye utilizando la combinación de tres de los ocho vectores de conmutación. El vector de tensión a generar por el inversor podrá ser cualquiera, y se podrá generar siempre que esté dentro del volumen encerrado por los vectores de conmutación. B C VDC 2 LA RLA vA iB vB RLB iC vC RLC V7 LB LC V4 SAn SBn SCn R S T V6 V6 D N 3 V3 Fig. 3. Puente inversor trifásico con barras DC partidas. TABLA I VECTORES DE CONMUTACIÓN NORMALIZADOS EN COORDENADAS D-E-0. & V0 & V1 & V2 & V3 & V4 & V5 & V6 & V7 000 100 110 010 011 001 101 111 D 0 2 3 1 1 1 1 E 0 0 1 2 2 0 3 2 1 1 1 2 3 2 3 2 3 ABC 6 6 1 2 3 6 6 1 1 2 2 1 1 1 2 3 2 3 2 3 0 0 0 3 2 El estado de los semiconductores de cada rama para los distintos vectores directores se muestra en la segunda fila de la Tabla I. Un “1” índica que el interruptor de la parte superior de la rama está cerrado (ON) y el de la parte inferior está abierto (OFF). La transformada utilizada para pasar de las tensiones obtenidas en las salidas A, B y C a coordenadas ortogonales D-E-0 es la indicada en (27). ª vD t º «v t » « E » «¬ v 0 t »¼ ª « « 2« 3« « « ¬ 1 0 1 2 1 2 3 2 1 2 1 º 2 » ª v t º A » 3» « v B t » » 2 » « 1 » «¬v C t »¼ 2 »¼ V1 V0 V0 Fig. 4. Vectores espaciales (Izq.) y planos (Der.) en coordenadas D-E-0. Para obtener los tres vectores que generarán un vector de tensión igual al de referencia, se determina en primer lugar cuáles son los dos vectores directores adyacentes al vector de referencia a generar, ayudándose de las proyecciones del vector de referencia sobre el plano D-E. Las proyecciones de los vectores directores en el plano D-E se muestran en la Fig. 5, donde se puede observar que estas proyecciones dividen el & & plano en seis sectores (los vectores V0 y V7 se sitúan en el centro del hexágono, perpendiculares al plano D-E, y no intervienen en este primer paso). Eje E V3 V2 II III V4 I V1 Eje D V0 V7 IV V1 V5 V5 La Tabla I muestra el valor de las proyecciones de los vectores de conmutación del inversor sobre los ejes del espacio tridimensional D-E-0. Los vectores están normalizados al valor VDC/2. V2 0 E - V4 V2 VI V (27) Los vectores de conmutación representados en coordenadas ortogonales D-E-0 se encuentran distribuidos en el espacio como se muestra en la Fig. 4 (izquierda), formando un prisma de base hexagonal, en el que cada vector determina una de las & & aristas del prisma, excepto los vectores V0 y V7 que V5 V6 Fig. 5. Proyección de los vectores de conmutación sobre el plano D,E. Vista superior. El segundo paso consiste en determinar el tercer vector de & & conmutación, que será el V7 o el V0 dependiendo de si el vector de referencia a generar está por encima o por debajo, respectivamente, del plano definido por los dos vectores directores adyacentes determinados en el paso anterior. En la Fig. 4 derecha se pueden observar los tres planos que se ORTS et al.: NEW ACTIVE COMPENSATOR BASED ON 43 pueden formar a partir de los vectores de conmutación. Las ecuaciones de dichos planos en coordenadas ortogonales D-E0 y los vectores incluidos en dichos planos se muestran en (28) (29) y (30). 1 6 1 2 6 1 2 6 D 0E D 1 2 2 D 1 2 2 1 O 3 1 E O 0 plano formado por V 2 V 4 V 5 V1 (29) O 0 plano formado por V 4 V 6 V 3 V1 (30) 3 1 E (28) 0 plano formado por V 2 V 6 V5 V 3 3 A partir del producto escalar del vector ortogonal que representa al plano por el vector de referencia, se obtiene la & situación relativa del vector de referencia V * vD* , vE* , v0* > ª 1 « ¬ 6 0 1º * » u vD 3¼ 1 P2 ª 1 « ¬2 6 2 2 P3 ª 1 « ¬2 6 2 2 1 > v E* v 0* @ T (31) 1 º * » u vD 3¼ v E* v 0* @ 1 º * » u vD 3¼ v E* v 0* @ > > T t nulo @ V DC x >1..6@; y >0,7@ 1 6 1 2 1 2 3 º 0 » » » 0 » » 3» 2 »¼ 1 (35) A partir de los ciclos de trabajo calculados en (34) se obtienen en (36), (37) y (38) los tiempos de aplicación de cada vector de conmutación en un periodo conmutación Tm. El tiempo restante (tnulo) para completar el periodo de & & conmutación se repartirá entre el vector V0 y el V7 a partes iguales (39). t x Tm d x (36) ty (33) > & T M x _ yV * M 1_ 0 (32) es el vector de tensión de referencia en coordenadas ortogonales D-E-0 y Mx_y es la matriz para la obtención de las proyecciones sobre los vectores de conmutación. 1 ª 2 « « 3 « « 0 « « 1 «2 3 ¬ t x 1 T En el tercer paso se utiliza la matriz de transformación correspondiente a los tres vectores elegidos en los pasos anteriores para obtener las proyecciones del vector de referencia sobre los vectores de conmutación ya determinados (34). Estas proyecciones determinan los tiempos durante los que se utilizará cada vector de conmutación determinado dentro de un periodo de conmutación (ciclos de trabajo). Al no existir ningún vector nulo (todos los vectores producen tensión a la salida del inversor), el tiempo restante del periodo de conmutación se completa repartiéndolo a partes & & iguales entre el vector V0 y el V7 , de forma que al ser opuestos, la tensión media aplicada por estos dos vectores es nula. Mediante la ecuación general (34), representada en forma matricial, se obtienen los ciclos de trabajo a partir del vector de tensión de referencia, la matriz de transformación & correspondiente y la tensión de las barras DC. V * vD* , vE* , v0* ª dx º « » « d x 1 » «¬ d y »¼ matrices se obtienen a partir de los valores indicados en la Tabla I según los vectores utilizados. @ respecto a cada plano. Un resultado positivo índica que el vector de referencia está situado por encima del plano y por & tanto hay que utilizar el vector de conmutación V7 . Un resultado negativo indica que hay que utilizar el vector de & conmutación V0 para construir el vector de referencia deseado. En (31), (32) y (33) se muestran los productos escalares (P1, P2, P3) que hay que realizar para determinar las posiciones relativas del vector de referencia respecto a los tres planos definidos por los vectores de conmutación. P1 Existen doce matrices de transformación Mx_y, dos por cada uno de los seis sectores definidos. Una se aplica cuando se & utiliza el vector V0 como tercer vector de conmutación, y la & otra cuando el vector utilizado es el V7 . El subíndice x indica el sector donde se sitúa el vector de referencia y determina el vector a aplicar en primer lugar. En (35) se muestra la matriz de transformación a emplear cuando el vector de tensión que se desea generar se encuentra en el sector I y por debajo del plano formado por los vectores & & & V1 y V2 (utiliza el V0 ). Los términos para el resto de las Tm d x 1 (37) Tm d y (38) Tm t x t x 1 t y x >1..6@; y >0,7@ (39) Por último hay que determinar la distribución de los ciclos de trabajo en el periodo de conmutación. La distribución elegida para el compensador activo es la de alineamiento simétrico, que presenta como principales características la baja distorsión de corriente y su mejor espectro armónico en la tensión de salida. La Fig. 6 presenta las señales de conmutación a aplicar a las tres ramas del inversor siguiendo la estrategia de alineamiento simétrico, cuando el vector de tensiones a generar se encuentra en el centro del sector I y la duración de todos los ciclos de trabajo de los vectores de conmutación es igual (Vector de referencia en el centro del sector I y apoyado sobre el plano D-E). V0 V1 V2 V7 V2 V1 V 0 V0 V1 V2 V7 V2 V1 V0 t 0 /2 t 2 /2 t 1 /2 t 0 /4 A 0 B 0 C 0 t 0 /4 t 1 /2 t 2 /2 t 0 /2 Tm(k) t 2 /2 t 1 /2 t 0 /4 t 0 /4 t 1 /2 t 2 /2 T m(k+1) (34) Fig. 6. Alineamiento simétrico de las señales de conmutación. 44 IEEE LATIN AMERICA TRANSACTIONS, VOL. 4, NO. 1, MARCH 2006 Para evaluar el tiempo de proceso requerido para implementar el control y la modulación, así como el cálculo de las corrientes de referencia, se ha programado todo el algoritmo en un procesador digital de señal TMS320F2812 (150 MIPS), resultando que el tiempo de proceso requerido para el lazo de regulación y la modulación vectorial es de 5Ps. Por otra parte, el tiempo necesario para el cálculo de la admitancia equivalente por fase G a partir de las componentes simétricas de tensiones de red y corrientes de carga es de 295 Ps. IV. RESULTADOS La carga se conecta a una red de distribución trifásica que presenta tensiones distorsionadas en el punto de conexión (Fig. 7), compuestas por una componente fundamental de 220 V y un armónico de tercer orden, cuya amplitud es del 10% de la amplitud de la fundamental. Para la comprobación del sistema propuesto, se presenta el caso de una carga de 7 kVA, formada por tres rectificadores monofásicos no controlados, uno por cada fase, alimentando cada uno una carga RL y una carga trifásica lineal desequilibrada. Las corrientes de carga se muestran en la Fig. 8. 400 v 300 v R S v T 200 T v , v , v (V) 100 R S 0 -100 -200 -300 -400 0 0.01 0.02 0.03 0.04 0.05 0.06 Tiempo (s) Fig. 7. Tensiones de alimentación en el punto de conexión común. iRc , iSc , iTc (A) 30 20 10 TABLA II POTENCIAS CORRESPONDIENTES AL SISTEMA SIN COMPENSAR. 0 -10 -20 Se P Se1 S1+ 8.429,850 VA 5.842,122 W 6.113,118 VA 6.069,929 VA 20 P1+ Q1+ Su1 SeN 10 5.771,197 W 1.880,779 var 725,375 VA 5.804,494 VA THDeI THDeV PF PF1+ -30 0 0.01 0.02 0.03 0.04 0.05 0.06 30 iN (A) todo el sistema mostrado en la Fig. 1, incluyendo los siguientes bloques: muestreo de las tensiones y corrientes, DFT’s para la obtención de componentes fundamentales de tensiones y corrientes, cálculo de componentes de secuencia directa de tensión y corriente (transformada de StokvisFortescue), cálculo de las corrientes de referencia, regulador de corriente, y modulador 3D 3B SVPWM. La frecuencia de conmutación del inversor es de 19,2 kHz y la frecuencia de muestreo del sistema es de 6,4 kHz. Para las simulaciones se ha utilizado una DFT de ventana deslizante basada en [11], con un ancho de ventana de 128 muestras, que se recalcula con cada nueva muestra. Esto permite que ante variaciones en las corrientes de carga el sistema responda en un ciclo del armónico fundamental (20 ms). La respuesta se produce de forma suave ya que, a medida que van entrando nuevas muestras al buffer, el sistema tiende al valor correcto. Las barras DC se implementan mediante dos condensadores con toma media para la conexión del conductor neutro, tal como se indica en la Fig. 1, con una tensión total de barras (VDC) de 800 V. Los condensadores utilizados son C1 = C2 = 4,7 mF / 400 V. La utilización de barras DC partidas presenta el problema de desequilibrios de tensiones entre la parte alta y baja de las mismas, tal como se cita en las referencias [12, 13]. En la simulación se han dispuesto resistencias de ecualización de la tensión con intensidad diez veces menor que la corriente de fugas de los condensadores usados y se ha implementado un control de desequilibrios de barras DC similar al explicado en [12]. En [12] y [14] se describen las condiciones de diseño del lazo de control de la tensión en las barras DC y un método de selección de la capacidad. Otros valores en el circuito de la Fig. 1 son: LA = LB = LC = 6 mH; RLA = RLB = RLC = 0,5 :. Para el sistema de tensiones y corrientes descritos, en la Tabla II se presentan las potencias y factores de distorsión armónica (según IEEE Std. 1459) antes de realizar la compensación de las ineficiencias. 0 -10 -20 -30 0 0.01 0.02 0.03 0.04 0.05 0.06 Tiempo (s) Fig. 8. Corrientes de carga por cada fase y por el neutro. El circuito de control propuesto para el compensador activo determina las corrientes de referencia que conseguirán la compensación total de las ineficiencias provocadas por la carga, eliminando el desfase, la asimetría y la distorsión en el punto donde se efectúa la conexión del compensador activo. El sistema se ha simulado mediante Matlab Simulink utilizando modelos descritos en [10]. Se ha implementado 0,939 0,100 Ie = 12,714 A 0,693 0,950 Ie1 = 9,266 A Las corrientes de referencia para la eliminación de los fenómenos de desfase, asimetría y distorsión se obtienen mediante las ecuaciones (18) (19) y (20). Las corrientes que inyecta el compensador son las mostradas en la Fig. 9. El compensador se activa a partir de t=20 ms. Durante estos primeros 20 ms el sistema se encuentra realizando la adquisición de las 128 primeras muestras para calcular mediante una DFT las corrientes de referencia del compensador activo. Se realiza la simulación con las barras ORTS et al.: NEW ACTIVE COMPENSATOR BASED ON 45 iA (A) 20 10 0 -10 -20 iB (A) 20 10 0 -10 -20 iC (A) 20 10 0 -10 -20 iN' (A) DC previamente cargadas a 800 V. En la Fig. 10 se muestran las corrientes que se consumen de la red de distribución, observándose la actuación del compensador activo a partir del instante en que se conecta. Las corrientes que circulan por la línea después de conectar el compensador activo son las corrientes fundamentales de secuencia directa activas, en fase con las tensiones de secuencia directa. El sistema se comporta como un sistema de máxima eficiencia. En la Tabla III se resumen las potencias del sistema compensado, las tasas de distorsión y los factores de potencia, calculados para las 100 primeras componentes armónicas. 20 10 0 -10 -20 V. CONCLUSIONES 0 0.01 0.02 0.03 0.04 0.05 0.06 0 0.01 0.02 0.03 0.04 0.05 0.06 0 0.01 0.02 0.03 0.04 0.05 0.06 0 0.01 0.02 0.03 0.04 0.05 0.06 Tiempo (s) Fig. 9. Corrientes suministradas por el compensador activo. iR , i S , i T (A) 30 20 10 0 -10 -20 -30 0 0.01 0.02 0 0.01 0.02 0.03 0.04 0.05 0.06 0.03 0.04 0.05 0.06 30 20 iN (A) activa. Se observa la importante reducción de las potencias que cuantifican los fenómenos no eficientes, manteniéndose como ineficiencia más importante la distorsión armónica. Parte de la distorsión que queda después de compensar es debida a que se ha mantenido el sistema de tensiones distorsionado en bornes de la carga durante toda la simulación. En sistemas reales la distorsión de la tensión es provocada por la existencia de corrientes distorsionadas en las líneas que provocan diferentes caídas de tensión en cada fase de la instalación. Al compensar las corrientes armónicas se mejora también las tensiones existentes en el pcc, efecto que no se ha incluido en las simulaciones. 10 0 -10 -20 -30 Tiempo (S) Fig. 10. Corrientes de línea (sup) y neutro (inf) antes y después de la compensación de las ineficiencias. TABLA III RESULTADOS TRAS LA COMPENSACIÓN DEL SISTEMA. Se P Se1 S1+ 5.773,403 VA 5.743,011 W 5.741,117 VA 5.741,136 VA P1+ Q1+ Su1 SeN 5.741,131 W -7,614 var 19,837 VA 609,223 VA THDeI THDeV PF PF1+ 0,035 0,100 Ie = 8,708 A 0,995 0,999 Ie1 = 8,702 A A partir de los valores de la Tabla 3 se observa que el sistema compensado se comporta de forma más eficiente. La potencia aparente efectiva es prácticamente igual a la potencia La IEEE Std. 1459 se perfila como la norma de futura referencia para la medida de potencias. Los nuevos criterios establecidos respecto a qué término de la potencia es el que se transforma en energía útil y cuáles son los términos no activos, deben ser tenidos en cuenta en el diseño de los algoritmos de control de los sistemas de compensación activa si se pretende conseguir la máxima eficiencia del sistema eléctrico. Como se ha demostrado en el artículo, es posible definir un conjunto de corrientes de referencia para un compensador activo que consigue que el sistema formado por la carga y el propio compensador solo consuman de la red de suministro corriente fundamental de secuencia directa activa, en fase con la tensión de fundamental de secuencia directa en el punto de conexión, obteniéndose de esta forma la eficiencia máxima en el sistema eléctrico. Los resultados demuestran que el compensador activo elimina los fenómenos no eficientes de desfase y asimetría y reduce sustancialmente la distorsión existente cuando se mantiene la distorsión de tensión en el punto de conexión. La eliminación de la potencia reactiva permite alcanzar un factor de potencia fundamental de secuencia directa de 0,999. La distorsión (potencia aparente efectiva armónica SeN) se ve reducida en gran medida pero no se elimina por completo debido a que, en el presente estudio, no se ha contemplado el efecto de la compensación sobre las tensiones del generador en el punto de conexión. Tras la compensación se alcanza un factor de potencia de 0,995. La utilización de las etapas de potencia desarrolladas para el control de motores AC trifásicos en el campo de los compensadores activos, presenta importantes ventajas económicas y tecnológicas frente a otras configuraciones. Tan solo es necesario añadir una conexión al punto medio de las barras DC que habitualmente está constituido por asociaciones serie paralelo de condensadores electrolíticos de 400 V. La aplicación a esta configuración del modulador 3D 3B SVPWM desarrollado, consigue el máximo aprovechamiento de la tensión de barras DC y que se trabaje a frecuencia de conmutación constante. En la actualidad se están llevando a cabo las pruebas de laboratorio que completan este trabajo. 46 IEEE LATIN AMERICA TRANSACTIONS, VOL. 4, NO. 1, MARCH 2006 VI. REFERENCIAS [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] H. Akagi, "Trends in active power line conditioners", IEEE Transactions on Power Electronics, vol. 9, no. 3, May 1994, pp. 263-268. M. Depenbrock, D. A. Marshall, J. D. van Wyk, “Formulating requirements for a universally applicable power theory as control algorithm in power compensators”, European transactions on electrical power ETEP, vol. 4, no. 6, Nov./Dec. 1994, pp. 445-454. IEEE Working group in non-sinusoidal situations: Effects on meter of performance and definitions of power, “Practical definitions in systems with non-sinusoidal waveforms and unbalanced loads: A discussion”. IEEE Trans. on Power Delivery, vol. 11, no.1, Jan. 1996, pp. 79-87. IEEE Trial Use Standard Definitions for the Measurement of Electric Power Quantities Under Sinusoidal, Non-Sinusoidal, Balanced, or Unbalanced Conditions. IEEE Std. 1459-2000. Institute of Electrical and Electronics Engineers. 01-May-2000. M. Aredes, J. Hafner, K. Heumann, “Three-phase, four-wire shunt active filter control strategies”; IEEE Trans. on Power Electronics, vol. 12, Mar. 1997, pp. 311-318. A. E. Emanuel, “Summary of IEEE standard 1459: Definitions for the measurement of electric power quantities under sinusoidal, nonsinusoidal, balanced, or unbalanced conditions.” IEEE Trans. on Industry Applications. vol. 40, no. 3, May. - Jun. 2004, pp. 869-876. M. Kazmierskowski, L. Malesani, “Current control techniques for three phase voltage source PWM converters”. IEEE Trans. on Industrial Electronics, vol. 45, no. 5, Oct. 1998, pp. 691-701. A. Abellán, G. Garcerá, M. Pascual, E. Figueres, “A new current controller applied to four-branch inverter shunt active filters with UPF control method”. 32 IEEE Power Electronics Specialists Conference, PESC. 2001. vol. 3, pp. 1402-1407. V. Prasad, D. Borojevic, R. Zhang, “Analysis and comparison of space vector modulation schemes for a four-leg voltage source inverter”, Applied Power Electronics Conference and Exposition, APEC '97. Conference Proceedings, vol. 2, pp. 864-871. S. Orts, S. Seguí, F. Gimeno, M. Alcañiz, R. Masot, “Modelling and simulation of three phase power active compensator with Matlab / Simulink” 35 IEEE Power Electronics Specialists Conference PESC04. IEEE 35th Annual vol. 4, 2004, pp. 3182 - 3187. A. G. Exposito, J.A.R. Macias, “Fast harmonic computation for digital relaying”, IEEE Trans. on Power Delivery, vol. 14, no. 4, Oct. 1999, pp. 1263-1268. M. Aredes, K. Heumann, E.H. Watanabe, “An universal active power line conditioner”, IEEE Transactions on Power Delivery, vol. 13, no. 2, 1998, pp. 545-551. M. K. Mishra, A. Joshi, A. Ghosh, A., “Control schemes for equalization of capacitor voltages in neutral clamped shunt compensator”, IEEE Trans. on Power Delivery, vol. 18, no. 2, Apr. 2003, pp. 538- 544 M. Liserre, F. Blaabjer, A. Dell’aquila, “Step-by-step design procedure for a grid-connected three-phase PWM voltage source converter”, INT. Journal on Electronics, Vol. 91, No. 8, Aug. 2004, pp: 445-460. VII. BIOGRAFÍAS Salvador Orts nació en Valencia, España (1972). Es Ing. Técnico Industrial (1996) e Ingeniero en Automática y Electrónica Industrial por la Universidad Politécnica de Valencia (UPV). Es profesor del departamento de Ing. Electrónica de la UPV e imparte clases de Electrónica de Potencia desde 2001. Student Member de IEEE desde junio de 2004. Desarrolla su labor científica en el Instituto de Tecnología Eléctrica, donde se encuentra finalizando su tesis doctoral centrada en los campos de mejora de la calidad del suministro eléctrico y energías renovales. Francisco José Gimeno Sales nació en Valencia, España, en 1958. Posee los títulos de Ingeniero Técnico en Electrónica Industrial (Universidad Politécnica de Valencia, España, 1980), Ingeniero en Informática (Universidad Politécnica de Valencia, España, 1999) y Doctor por la Universidad Politécnica de Valencia desde 2004. Hasta 1992 ha desarrollado diversas actividades en empresas informáticas y de comunicaciones industriales, actuando como responsable de I+D+I en desarrollo de sistemas hardware y software. Desde 1992 es miembro del Departamento de Ingeniería Electrónica impartiendo clases de electrónica de potencia y microcontroladores en la Escuela Técnica Superior de Ingeniería del Diseño. Es responsable de diversos cursos especializados en energías renovables, procesadores digitales de señal en entornos industriales y software de aplicación industrial. Sus líneas de investigación se relacionan con la generación distribuida a partir de energía solar fotovoltaica, la gestión energética en redes de distribución y la mejora de la calidad de suministro. Antonio Abellán (IEEE Student member 1996, IEEE member 2005) nació en Villena, España, en 1966. Ingeniero Técnico Industrial (B.S., 1987) e Ingeniero Industrial (M. Sc., 1993) por la Universidad Politécnica de Valencia (UPV). En 2001 recibió el título de Doctor Ingeniero Industrial (Ph. D.) por la Universidad Politécnica de Valencia (UPV). Es profesor Titular de Universidad del departamento de Ing. Electrónica de la UPV, donde imparte docencia en las asignaturas de Electrónica de Potencia y Experimentación en Electrónica Industrial desde 1994. Desarrolla su labor científica en el grupo de investigación GSEI ( Grupo de Sistemas Electrónicos Industriales) dentro del Departamento de Ingeniería Electrónica, estando su investigación centrada en las siguientes áreas: Modelado y control de convertidores de potencia, Circuitos de corrección del factor de potencia y Filtros activos de potencia. Salvador Seguí Chilet (miembro de IEEE desde 2001) nació en Valencia, España, en 1962. Posee los títulos de Ingeniero Técnico en Electrónica Industrial (Universidad Politécnica de Valencia, España, 1986), Ingeniero en Electrónica (Universidad de Valencia, España, 1999) y es Doctor por la Universidad Politécnica de Valencia desde 2004. Desde 1990 es miembro del Departamento de Ingeniería Electrónica impartiendo clases en la Escuela Técnica Superior de Ingeniería del Diseño. Sus líneas de investigación se relacionan con las aplicaciones industriales que integran los siguientes campos: electrónica de potencia, energías renovables y generación distribuida, compensación activa de ineficiencias en sistemas eléctricos. Además colabora en cursos especializados en energías renovables y en procesadores digitales de señal en entornos industriales. Miguel Alcañiz nació en Valencia, España, en 1968. En 1.992 obtuvo la licenciatura en Ciencias Físicas por la Universidad de Valencia, España. Desde 1.993 a 1.997 trabajó en sistemas electrónicos de telecomunicación y medida en el Departamento de I+D de Electricidad Viala. Entre 1.997 y 1.999 fue ingeniero de test en la línea de producción de MSL en Valencia. Desde 1.998 imparte clases en el Departamento de Ingeniería Electrónica de la Universidad Politécnica de Valencia. Sus líneas de investigación incluyen la aplicación de sistemas μC y DSP a la medida de la potencia eléctrica. Rafael Masot nació en Valencia, España, en 1968. En 1.991 obtuvo la licenciatura en Ciencias Físicas y en 1.996 el título de Ingeniero en Electrónica (Universidad de Valencia, España). Desde 2.001 imparte clases de Tecnología Electrónica, Electrónica Digital y Sistemas Electrónicos Industriales Avanzados en el Departamento de Ingeniería Electrónica de la Universidad Politécnica de Valencia (UPV). Su investigación está relacionada con el control de sistemas de compensación para la mejora de la calidad del suministro eléctrico.