configuración integrador.
Anuncio

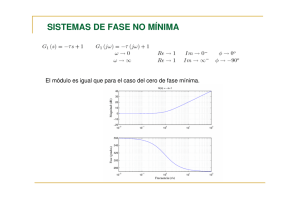
CONFIGURACIÓN INTEGRADOR. Considerando las corrientes sobre el nodo de entrada: dV Vi 1 dVo I R = IC =C C ; VC = −Vo Vi = −C R dt R dt 1 Vo = − Vidt + Voini RC Observe que a la salida se obtiene la OPAMP está alimentado con ±15V, éste se integral del voltaje de entrada, multiplicado por saturará a su valor negativo en tan sólo 3ms. un factor inverso RC y con cambio de fase. Ahora, si la frecuencia de Vi es muy Si analizamos en frecuencia el sistema, alta, la integral es igual a cero, por lo que a la la integral de una constante es la constante salida obtenemos 0V, es decir, atenuación total misma multiplicada por la variable (en este de la señal. caso el tiempo), por lo que el resultado es una pendiente en el tiempo. Así que si la entrada Analizando el circuito por Laplace: permanece constante, la salida aumentará con 1 Z Vo 1 respecto al tiempo, hasta llegar a la saturación. ( s ) = − C = − Cs = − Vi ZR R RCs Ejemplo: Si Vi=5V constante, entonces: Lo cual representa un polo en el origen, 1 5 5t; τ = RC Vo = − t Vo = − su diagrama de bode se representa por una RC τ pendiente de -20dB/dec cruzando la ganancia Si consideramos que Voini=0 y =1ms. unitaria en =1/RC. Vo aumentará 5V cada 1ms (de manera negativa por la inversión). Por lo tanto, si el CONFIGURACIÓN DERIVADOR. Considerando las corrientes sobre el nodo de entrada: dV Vo C C =− ; IC = I R VC = Vi dt R dVi Vo = − RC dt Observe que a la salida se obtiene la Analizando el circuito por Laplace: derivada del voltaje de entrada, multiplicado Z Vo R ( s) = − R = − = − RCs por un factor RC y con cambio de fase. 1 Vi ZC Cs Si analizamos en frecuencia el sistema, Lo cual representa un cero en el origen, la derivada de una constante es cero, por lo que su diagrama de bode se representa por una si el voltaje de entrada es constante, tendremos pendiente de +20dB/dec cruzando la ganancia 0V a la salida, es decir, atenuación total de la unitaria en =1/RC. señal. Ahora, si la frecuencia de Vi es muy alta, la derivada tiene a ser un valor muy grande, lo cual saturaría la configuración. Ambas configuraciones, no pueden utilizarse como tal, sin control; debido a que las componentes de c.d., inclusive el voltaje de desbalance del OPAMP, acabaría por saturar el integrador y cualquier ruido de alta frecuencia, haría lo mismo con el derivador. Por lo que se utilizan configuraciones limitadas en ganancia a dichas frecuencias, las cuales por asegurar la estabilidad, ésta se paga con ancho de banda. CONFIGURACIÓN INTEGRADOR. Analizando el circuito por Laplace: ZR C Vo (s) = − F Vi Z RI ( ) RF 1 Cs RF 1 RF + RI Cs = − =− RI RF Cs + 1 Lo cual representa una ganancia fija a cualquier frecuencia y un polo desplazado en =1/RFC. Su diagrama de bode se representa por una ganancia constante y una pendiente de -20dB/dec a partir de la frecuencia donde se encuentra el polo. En el ejemplo del diagrama a bode RF>RI: Analizando el diagrama, la acción integradora se encuentra en la pendiente de -20dB/dec, así que el sistema no integrará sino a partir de la frecuencia donde empieza dicha pendiente, por lo que el ancho de banda de la configuración y su frecuencia de corte es de: 1 1 > Bω > ∞ ω = 2πf fC = RF C 2πRF C CONFIGURACIÓN DERIVADOR. Analizando el circuito por Laplace: Z RF RF R Cs Vo (s) = − =− =− F R I Cs + 1 Vi Z RI +C RI + 1 Cs Lo cual representa un cero en el origen y un polo desplazado en =1/RIC. Su diagrama de bode se representa por una pendiente de +20dB/dec cruzando la ganancia unitaria en =1/RFC y además una pendiente de -20dB/dec a partir de =1/RIC, la cual anularía a la pendiente del cero, dejando una ganancia constante para todas las frecuencias subsecuentes. En el ejemplo del diagrama a bode RF>RI: Observe también, que la acción derivadora se encuentra en la pendiente de +20dB/dec, por lo que ésta se ve limitada a una frecuencia máxima, por lo que el ancho de banda y la frecuencia de corte es de: 1 1 0 < Bω < ω = 2πf fC = RI C 2πRI C