Resolución de problemas utilizando el criterio de Routh
Anuncio

I NGENIER ÍA EN AUTOMATIZACI ÓN
Control Automático 1
Problemas Resueltos
Y
C ONTROL I NDUSTRIAL
U NIVERSIDAD N ACIONAL DE Q UILMES
29 de julio de 2003
Página 1 de 2
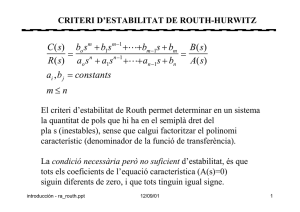
Resolución de problemas utilizando el criterio de Routh-Hurwitz
En este apunte veremos técnicas para utilizar el criterio de Routh cuando el primer término de una de las
lı́neas es cero o si una lı́nea entera es cero mediante ejemplos. Por último veremos una aplicación del criterio
de Routh.
Caso 1: Consideremos primero el caso en donde el primer elemento de una fila es cero, pero al menos uno de
los otros elementos es no nulo. Tomemos el polinomio P(s) = s5 + 3s4 + 2s3 + 6s2 + 3s + 3, el arreglo
numérico que resulta es
s5 1 2 3
s4 3 6 3
s3 0 2
s2
s1
s0
=⇒
s5
1
s4
3
s3
|ε|
s2
6 − ε6
|ε|2
s1 2 + 2−2|ε|
s0
3
2 3
6 3
2
Si ahora hacemos |ε| −→ 0+ , observamos que
lim + 6 −
|ε|→0
6
<0
|ε|
lim + 2 +
y
|ε|→0
|ε|2
>0
2 − 2|ε|
por lo que concluimos que el polinomio P(s) no es Hurwitz y dado que existen dos cambios de signos
en la primer columna del arreglo numérico de Routh, P(s) tiene dos raı́ces con parte real positiva.
Caso 2: Consideremos ahora el caso en el que toda una fila es nula, para ello utilicemos P(s) = s5 + 6s4 + 12s3 +
12s2 + 11s + 6 y armemos el arreglo numérico de Routh:
s5 1 12 11
s4 6 12 6
s3 10 10
s2 6 6
s1 0 0 Pa (s) = 6s2 + 6
a (s)
nuevo s1 12 0 ←− dPds
= 12s
0
s
6
No hay cambios de signo en la primera columna. Por lo tanto, todas las raı́ces tienen parte real negativa.
excepto un par que son
Pa (s) = 6s2 + 6 = 0
⇒
s = ±j
Aplicación del criterio de Routh
El método de Routh lo podemos utilizar para determinar los intervalos de los parámetros para los cuales un
sistema realimentado como el de la Figura 1, permanece estable. Veremos ahora algunos ejemplos:
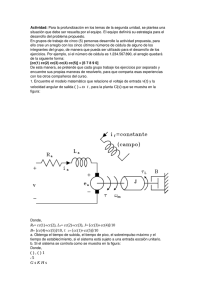
Ejemplo 1 Consideremos el sistema de la Figura 1. Las propiedades de estabilidad del sistema están en
función de la ganancia de realimentación K en la ecuación caracterı́stica 1 + KG. La ecuación caracterı́stica
para el sistema está dada por
1+K
s+1
=0
s(s − 1)(s + 6)
⇒
s3 + 5s2 + (K − 6)s + K = 0.
Control Automático 1
r
- h
−
6
Problemas Resueltos
y-
- G(s)
G(s) =
con
K Página 2 de 2
s+1
s(s − 1)(s + 6)
Figura 1: Un sistema en realimentación
El arreglo de Routh correspondiente es
s3
s2
s1
s0
K −6
K
1
5
4K−30
5
K
Para que el sistema permanezca estable, necesitamos que
4K − 30
>0
5
y
K>0
por que si K > 7.5 el sistema permanecerá estable.
Ejemplo 2 Consideremos la siguiente planta nominal y el controlador
Go (s) =
100
(s − 0.5)(s + 4)
K(s) =
(s + 3)
s2 + 4s + 5
Supongamos que el controlador tiene una ganancia λ . Estudiemos para qué valores de λ el sistema a LC
permanece estable. El polinomio caracterı́stico 1 + λ K(s)Go (S) viene dado por
P(s) = (s2 + 4s + 5)(s2 + 3.5s − 2) + 100λ
| {z }(s + 3)
K
4
3
2
= s + 7.5s + 17s + (9.5 + K)s + (3K − 10)
El arreglo de Routh correspondiente es
s4
1
s3
7.5
118−K
s2 7.5
7.5
118−K
1
s
(9.5 + K)( 7.5 ) − 7.5(3K − 10) 118−K
s0
3K − 10
17
3K − 10
9.5 + K
3K − 10
Para que sea estable, de las filas correspondientes a s2 y s0 tenemos que
K>
10
3
K < 118
y de s1 tenemos que
−k2 − 60.25K + 1683.5
>0
118 − K
⇒
K > 118
o
K ∈ (−81.02, 20.77)
como la ganancia K es positiva, la intersección de todas las condiciones nos da la condición final: k ∈ (3.33, 20.77)
Recordemos que el parámetro original era λ por lo que habrá que escribir el intervalo el función de él.