• Determinar la controlabilidad y la observabilidad de modelos en el
Anuncio

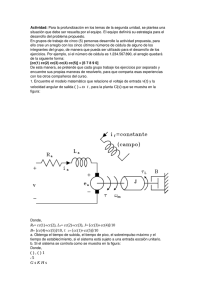
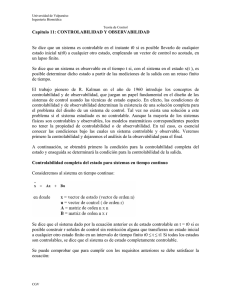
Guía 4 1 Facultad: Ingeniería. Escuela: Electrónica Asignatura: Control Digital Tema: Controlabilidad y Observabilidad. Lugar de ejecución: Taller de Electrónica (Laboratorio: Instrumentación y Control). Tiempo de ejecución: 2 hrs. Objetivos específicos • • Determinar la controlabilidad y la observabilidad de modelos en el espacio de estado usando la caja de herramientas de sistemas de control de MATLAB. Aplicar los conceptos mostrados en la guía. Introducción Teórica En una representación por variable de estados de un sistema lineal, con matrices A, B, C y D, las matrices A y C describen el comportamiento no-forzado del sistema (o el comportamiento a entradacero), mientras que la matriz B caracteriza el efecto de la entrada (o el control) sobre la dinámica del sistema. La matriz D representa la transmisión directa de la entrada a la salida. Los conceptos de controlabilidad y observabilidad fueron introducidos por Kalman en el año 1960. Ellos afrontan respectivamente la relación que existe entre la entrada y el estado (la controlabilidad), y entre el estado y la salida (la observabilidad). En esta guía, cada vez que hagamos referencia a la entrada u(t) del sistema, supondremos que esa entrada es de acción de control, y no de una entrada que sea una perturbación al sistema (la entrada u(t) es siempre una variable que podemos "manejar" de alguna manera). La controlabilidad de un sistema responde a la siguiente pregunta: ¿Existe siempre una entrada de control u(t) la cual puede transferir el sistema desde el estado inicial x0 a cualquier otro estado x1 deseado en un tiempo finito? Mientras que la observabilidad responde a la pregunta: ¿El estado inicial x0 del que parte un sistema, puede siempre identificarse mediante la observación de la salida y(t) y de la entrada u(t) sobre un tiempo finito t? Estas características del sistema pueden ser contestadas mediante las propiedades de las matrices A, B, C y D. Ya que las matrices A y B tienen que ver con la relación entre entrada y estado, a este par de matrices se las conoce como el par de controlabilidad. En cambio, como las matrices A y C involucran el estado con la salida, a estas dos matrices se las conoce como el par de observabilidad. Controlabilidad Considere el sistema lineal continuo en el tiempo representado por: Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 Página 1/18 Guía 4 • x(t ) = A(t ) ⋅ x(t ) + B (t ) ⋅ u (t ) , t ≥ t0, x(t0) = x0 [Ec. 1] y (t ) = C (t ) ⋅ x (t ) + D (t ) ⋅ u (t ) donde A, B, C y D son funciones continuas del tiempo. Supongamos que para alguna entrada u(t), t ∈ [t0,t1], y para el estado inicial x0, el estado al tiempo t1 es x1. Decimos entonces que la entrada u transfiere el sistema desde el estado x0 (en el tiempo t0) al estado x1 (al tiempo t1). Veamos ahora entonces las definiciones de controlabilidad. Definición I: Estado controlable El estado inicial x0 del sistema descrito por las ecuaciones [1] se dice que es controlable sobre el intervalo [t0, t1] donde t1 es un tiempo finito, si existe alguna entrada u sobre [t0, t1] el cual transfiere el sistema desde el estado x0 (al tiempo t0) al origen del espacio de estado al tiempo t1. De otra manera se dice que el estado x0 es incontrolable sobre [t0, t1]. Notar que en la definición utilizamos como estado de arribo al origen del espacio de estado x = 0 pero esto se cumple, si y solo si, el estado final fuera cualquier otro estado x1 (por tratarse de sistemas lineales). Notar además que en la definición pedimos que al menos exista una u(t), pero esta u(t) no necesariamente tiene que ser única (puede haber más de una u(t) que nos lleve el sistema desde x0 a 0). Definición II: Sistema completamente controlable Si todo estado x(t0) del sistema es controlable sobre [t0, t1], el sistema se dice que es completamente controlable sobre [t0, t1]. Ejemplo 1: Considere el sistema descrito por las ecuaciones [1], donde A, B, C y D son las matrices constantes: − 1 0 1 A= B= C = [1 1], 0 − 1 , 0 , D=0 Como podemos observar, podemos escribir la ecuación de cada uno de los estados, que será: • x1 = − x1 + u • x2 = − x2 y la ecuación de la salida: y = x1 + x2 y suponiendo que el estado inicial fuere x1(t0) = x10, y x2(t0) = x20, podemos graficar el diagrama de simulación de dicho sistema como muestra la siguiente figura: Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 2 Guía 4 De la figura y de las ecuaciones podemos observar que solo los estados que parten de (x10, 0)T pueden ser llevados al origen en un tiempo finito t, ya que la componente x2 si partiera de un estado distinto a 0 no podría manejarse a través de u hacia el origen (aunque a tiempos infinitos tendería a llegar a ese estado). Por lo tanto los estados de la forma (x10, 0)T son controlables según la definición I, pero el sistema no es completamente controlable, ya que no todos los estados pueden llevarse al origen del espacio de estados. Observar igualmente que si ambas componentes del vector B hubieran sido distintas de cero, por ser la matriz A una matriz de autovalores múltiples completamente diagonal, siempre habrá un subespacio del espacio de estado el cual no podrá ser afectado por la entrada u(t). Definiciones para los sistemas discretos: En las definiciones I, II de controlabilidad para sistemas lineales continuos en el tiempo, si reemplazamos las t por k (o sea, reemplazamos: t0 por k0, t1 por k1, y [t0, t1] por [k0, k1]), obtenemos las definiciones de controlabilidad para los sistemas discretos en el tiempo. Caracterización de la controlabilidad Teorema: El sistema continuo descrito por las ecuaciones de estado [1] es completamente controlable sobre [t0, t1], si y solo si, las filas de la matriz Φ -1(t).B(t) son linealmente independientes sobre [t0, t1], donde Φ(t) es la matriz de transición del sistema no-forzado. En forma equivalente, el sistema es completamente controlable sobre [t0, t1], si y solo si, la matriz de Gram de Φ -1(t).B(t) : t1 M (t 0 , t1 ) = ∫ Φ (t1 ,τ ) ⋅ B (τ ) ⋅ B * (τ ) ⋅ Φ * (τ , t1 ) ⋅ dτ t0 es no singular. Más aún, el control u(t) que transfiere el estado del sistema completamente controlable desde x(t0) = x0 a x(t1) = 0, es: u (t ) = − B * (t ) ⋅ Φ * (t1 , t ) ⋅ M −1 (t 0 , t1 ) ⋅ Φ (t1 , t 0 ) ⋅ x 0 COME%TARIO: Las matrices o vectores temporales estrelladas (*) significan que es la matriz (o el vector) transpuesto y conjugado. La demostración de este teorema está desarrollada en el libro Jamshidi. Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 3 Guía 4 De forma equivalente, existe el teorema para sistemas discretos, demostrado también en el mismo libro: Teorema: El sistema discreto descrito por las siguientes ecuaciones de estado: x (k + 1) = A(k ) ⋅ x ( k ) + B ( k ) ⋅ u ( k ) , k ≥ k0 [Ec. 2] es completamente controlable sobre [k0, k1], si y solo si las filas de la matriz Φ -1(k+1).B(k) son linealmente independientes sobre [k0, k1] donde Φ(k) es la matriz de transición del sistema sin forzar (cuando u(k) = 0). O en forma equivalente, si y solo si la matriz (de Gram): M (k 0 , k1 ) = k1 ∑ Φ(k , j + 1) ⋅ B( j ) ⋅ B ( j ) ⋅ Φ (k , j + 1) * * 1 1 j =k0 es no singular. Más aún, el control u(k) que transfiere el estado del sistema completamente controlable desde x(k0) = x0 a x(k1) = 0 es: u ( k ) = − B * (k ) ⋅ Φ * (k1 , k + 1) ⋅ M −1 (k 0 , k1 ) ⋅ Φ (k1 , k 0 ) ⋅ x 0 Para sistemas l.t.i. (invariantes en el tiempo) estos teoremas pueden trasladarse a criterios aplicables fácilmente sobre las matrices A y B. Notar que ahora para los sistemas l.t.i., debido a la invarianza sobre el tiempo, no necesitamos especificar el intervalo de controlabilidad [t0, t1] ó [k0, k1] como en el caso variante en el tiempo. Esto es, si un sistema l.t.i. es completamente controlable sobre algún intervalo de tiempo, entonces es completamente controlable sobre cualquier intervalo de tiempo. Teorema: El sistema: • x(t ) = A ⋅ x(t ) + B ⋅ u (t ) Ec. [3] donde A y B son matrices constantes de dimensiones nxn, y nxr respectivamente, es completamente controlable, si y solo si, la matriz de controlabilidad de dimensión nx(n.r): C c = B A ⋅ B A 2 ⋅ B .... A ( n −1) ⋅ B es de rango n. [ ] Si bien, este teorema es válido para sistemas cuya entrada sea un vector de r componentes, haremos la demostración para el caso en que u es escalar. Demostración: Definamos la condición A como que la matriz Cc es de rango n, y la condición B que el sistema [3] sea completamente controlable. Tenemos que demostrar que A <=> B. Pero esto es completamente equivalente a demostrar que: not(A) <=> not(B) a) Demostremos entonces primero que not(A) => not( B): Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 4 Guía 4 Si Cc no es de rango n, entonces su rango debe ser: rango(Cc) < n. Si esto es así, entonces existe un vector fila v distinto a la solución trivial v = 0, tal que: v.Cc = 0 esto significa que cada una de sus componentes son cero: v.B = v.A.B = v.A2.B = .... = v.A(n-1).B = 0 (*) Se puede comprobar matemáticamente además que A satisface su ecuación característica: An + a1.A(n-1) + ... + an = 0 Premultiplicando por v, y posmultiplicando esta ecuación por B, tenemos: v.An.B + a1. v.A(n-1) .B + .... + an.v.B = 0 pero todos los términos de la suma, excepto el primero sabemos que son cero por (*). Por lo tanto, v.An.B debe ser también igual a cero. Y así sucesivamente, si envés de posmultiplicar por B, posmultiplicamos por Ak.B , obtendremos que: v.A(k+n).B = 0 t Con lo cual, la solución partiendo de x0 = 0, que es: es ortogonal al vector v, puesto que: x(t ) = ∫ e A⋅(t −τ ) ⋅ B ⋅ u (τ ) ⋅ dτ 0 t v ⋅ x(t ) = ∫ v ⋅ e A⋅(t −τ ) ⋅ B ⋅ u (τ ) ⋅ dτ 0 = 0, para todo u(t), y teniendo en cuenta la definición de exponencial de una matriz. Por lo tanto, el subespacio generado por v no es alcanzable desde el origen, y por lo tanto el sistema no es controlable (not(B)). b) Ahora demostremos la inversa, que not(B) => not(A) Si el sistema es no controlable, entonces existe un vector no trivial v, tal que se cumple que: t v ⋅ x(t ) = ∫ v ⋅ e A⋅(t −τ ) ⋅ B ⋅ u (τ ) ⋅ dτ = 0 0 , para todo u(t). Y por lo tanto debe ser: v ⋅ e A⋅(t −τ ) ⋅ B = 0 , para 0 ≤ τ ≤ t . Hagamos que τ = t , entonces vemos que debe cumplirse v ⋅ B = 0 . Derivemos una vez la ecuación con respecto a τ , y evaluemos en τ = t . Nos quedará: − v ⋅ A⋅ B = 0 v ⋅ A⋅ B = 0 => Y así derivando, sucesivamente, obtendremos: v ⋅ A2 ⋅ B = 0 , v ⋅ Ak ⋅ B = 0 Y por lo tanto la matriz Cc no es de rango completo. Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 5 Guía 4 Ejemplo 2: Consideremos el sistema descrito por las ecuaciones [1], del ejemplo anterior: − 1 0 1 A= B= C = [1 1], 0 , 0 − 1 , D=0 Calculemos su matriz de controlabilidad: 1 − 1 C c = [B A ⋅ B ] = 0 0 , que como vemos es de rango 1, y por lo tanto dicho sistema no es controlable, como ya lo habíamos predicho anteriormente. Sistemas SISO: Concentrémoslos ahora en sistemas de una sola entrada, lineales e invariantes en el tiempo (l.t.i.). Para dichos sistemas la matriz de controlabilidad es cuadrada, y si la misma es de rango n, significa que la misma es no-singular y que es invertible. A partir de un sistema cualquiera en general, busquemos llevarlo a su forma canónica de controlabilidad. Supongamos que x representa el estado en la base original y que z sea la representación del estado en la base de su forma canónica de controlabilidad. La matriz de transformación T de un espacio a otro es tal que: x = T.z Entonces el sistema en la representación original es: • x(t ) = A ⋅ x(t ) + B ⋅ u (t ) y (t ) = C ⋅ x (t ) + D ⋅ u (t ) En la nueva base de la forma canónica de controlabilidad será: • z (t ) = Ac ⋅ z (t ) + Bc ⋅ u (t ) y (t ) = C c ⋅ z (t ) + Dc ⋅ u (t ) Y ya conocemos que la matriz de transformación T relaciona de la siguiente manera las matrices del sistema: Ac = T -1.A.T Bc = T -1.B Cc = C.T Dc = D Tomando la primera ecuación, y posmultipliquemos por la inversa de la matriz T a ambos miembros, y por lo tanto tendremos: Ac. T -1 = T -1.A Distingamos la inversa de la matriz T por sus vectores filas ti con i = 1, 2, ...n (hagamos para el caso en que el sistema sea de 3x3, pero esto no implica una pérdida de la generalidad): Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 6 Guía 4 t1 T = t 2 t 3 Pero como ya conocemos la forma que tiene la matriz Ac, entonces se debe cumplir que: − a1 − a 2 − a3 t1 t1 1 0 0 ⋅ t 2 = t 2 ⋅ A 0 1 0 t 3 t 3 de la segunda fila de esta ecuación tenemos que: t1 = t2.A y de la tercera fila de la misma: t2 = t3.A Por otro lado tenemos: 1 t1 0 = B = T −1 ⋅ B = t ⋅ B c 2 0 t 3 y debe cumplirse entonces: 1 = t1.B, 0 = t2.B y 0 = t3.B. Así: t3.A2.B = 1 t3.A.B = 0 t3.B = 0 Invirtiendo el orden y escribiéndolo en forma matricial: t3 . [B A.B A2.B] = [0 0 1] Y la matriz que posmultipla al vector fila t3 no es otra cosa que la matriz de controlabilidad Cc. El vector t3 podemos calcular como: t3 = [0 0 1] . Cc-1, si la matriz de controlabilidad es invertible. Una vez obtenido t3, determinamos t1 y t2 como: t1 = t3.A2, y t2 = t3.A. Al tener todos los ti, tenemos entonces T -1 y por lo tanto T, que es lo que queríamos obtener. −1 En resumen, el método para obtener la forma canónica de controlabilidad a través de una matriz de transformación del espacio de estado consiste en realizar los siguientes pasos: PASO 1: De las matrices A y B del sistema original, construyamos la matriz de controlabilidad como: Cc = [B A.B A2.B] PASO 2: Calculamos la última fila de la inversa de la matriz de transformación como: tn = [0 0 .... 0 1] . Cc-1 PASO 3: Determinamos la matriz de transformación como: t n ⋅ A ( n −1) ( n −2) t n ⋅ A T −1 = . tn ⋅ A t n Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 7 Guía 4 PASO 4: Conociendo T y T -1, determinamos las matrices en el nuevo espacio de estado (que es el de la forma canónica de controlabilidad): Ac = T -1.A.T Bc = T -1.B Cc = C.T Notar que un cambio de estado por una matriz de transformación lineal no cambia la condición de controlabilidad del sistema, ya que: Ccx = T -1 Ccw, y la matriz T es siempre no-singular puesto que es una matriz de transformación. En otras palabras: la controbalidad del sistema es invariante ante cambios de la base del espacio de estado. Observar que si el sistema es completamente controlable podemos hallar su forma canónica de controlabilidad, y si no lo es, no lo podemos hallar. El camino inverso también se da: siempre que podemos encontrar la forma canónica de controlabilidad de un sistema entonces el sistema es completamente controlable, y si no podemos encontrar la forma canónica de controlabilidad entonces el sistema no es completamente controlable. O sea: Siempre podemos encontrar la forma canónica de controlabilidad de un dado sistema, si y solo si el sistema es controlable. Esto nos da pie a una definición equivalente a controlabilidad de un sistema para los sistemas l.t.i. de una sola entrada: Definición III: Equivalente a completamente controlable para sistemas l.t.i. de una sola entrada Un sistema l.t.i. (con una entrada escalar) representado por el par de matrices de controlabilidad (A, B) es controlable, si para todo polinomio αc(s) de grado n existe una única ley de control u = -K.x tal que: det(s.I-A+B.K) = αc(s) Cuando veamos más adelante diseño veremos que podremos modificar el lugar de los autovalores del sistema haciendo una retroalimentación lineal del estado de la forma u = -K.x, pudiendo elegir arbitrariamente el lugar de los autovalores en forma unívoca con la definición del vector K de n componentes. Esto se puede ver muy fácilmente si el sistema está representado en la forma canónica de controlabilidad (y como habíamos visto siempre podremos llevarlo a la forma canónica de controlabilidad si y solo si el sistema es controlable). También existe otra definición equivalente de controlabilidad: Definición IV: Equivalente a completamente controlable Un sistema l.t.i. (con una entrada escalar) representado por el par de matrices de controlabilidad (A, B) es controlable, si todos los modos de A están conectados a la entrada de control. Veamos esto en un sistema que pueda ser completamente diagonalizable. Consideremos el caso de un sistema de orden 3, pero sin perder la generalidad. Considere que el para (A, B) donde: Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 8 Guía 4 λ1 0 0 b1 A = 0 λ2 0 B = b2 0 0 λ3 b3 , Un diagrama de bloques para este sistema sería el siguiente: Es evidente que si algunos de los bi es cero, el modo correspondiente no puede ser alcanzado por la acción de control u. Pero también se requiere que todos los modos del sistema sean distintos λi. Si tenemos dos autovalores iguales: • x1 = λ1 ⋅ x1 + b1 ⋅ u • x 2 = λ1 ⋅ x 2 + b2 ⋅ u El sistema es no controlable porque no puedo desacoplar las respuestas de x1 y x2. Matemáticamente, puedo definir una nueva variable de estado ξ, que no es afectada por la entrada u: ξ = b2 ⋅ x1 − b1 ⋅ x2 Y calculando su derivada: • • • ξ = b2 ⋅ x1 − b1 ⋅ x 2 = b2 ⋅ (λ1 ⋅ x1 + b1 ⋅ u ) − b1 ⋅ (λ1 ⋅ x 2 + b2 ⋅ u ) = En concreto: • ξ = λ1 ⋅ ξ O sea que la nueva variable de estado ξ no puede ser controlada por la acción de control u. Una conclusión similar podemos arribar utilizando la matriz de controlabilidad, la misma será: b1 λ1 ⋅ b1 λ1 2 ⋅ b1 2 C c = B A ⋅ B A 2 ⋅ B = b2 λ 2 ⋅ b2 λ 2 ⋅ b2 b3 λ3 ⋅ b3 λ3 2 ⋅ b3 [ ] Y esta matriz de controlabilidad la podemos escribir como el producto de las siguientes matrices: Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 9 Guía b1 C c = 0 0 0 b2 0 0 1 λ1 0 ⋅ 1 λ 2 b3 1 λ3 4 λ1 2 λ2 2 λ3 2 La segunda matriz se la conoce como la matriz de Vandermonde. Entonces finalmente el par de matrices (A, B) es completamente controlable, si y solo si, todos los λi son distintos entre sí (para que la matriz de Vandermonde sea no-singular), y todos los bi sean distintos de cero (para que la primer matriz sea no-singular); confirmando así el resultado obtenido anteriormente. Notar que estamos hablando de matrices A que sean completamente diagonalizables. Si la matriz A es llevada a una forma de Jordan completa (los autovalores múltiples comunes tienen un solo autovector), el sistema igualmente puede llegar a ser controlable. Ejemplo 3: Consideremos el siguiente sistema representado por las siguientes matrices de variables de estado: − 1 0 A= 1 1 , − 2 B= 1 Calculemos su matriz de controlabilidad: − 2 2 Cc = 1 − 1 cuyo rango es de 1, y por lo tanto el sistema es no controlable. Calculemos la función de transferencia de u a x1: − 2 ⋅ (s − 1) −2 G1 ( s ) = = (s + 1) ⋅ (s − 1) (s + 1) Y la función de transferencia de u a x2: (s − 1) = 1 G2 ( s) = (s + 1) ⋅ (s − 1) (s + 1) Como podemos observar, en ambas funciones de transferencia existe una cancelación de cero y polo, la del modo en s = +1. Esto significa que justamente el modo s = +1 es el modo del sistema que no es controlable. Observabilidad Considere el sistema lineal continuo en el tiempo representado por: • x(t ) = A(t ) ⋅ x(t ) + B (t ) ⋅ u (t ) , t ≥ t0, x(t0) = x0 [Ec. 1] y (t ) = C (t ) ⋅ x (t ) + D (t ) ⋅ u (t ) donde A, B, C y D son funciones continuas del tiempo. La solución completa de la ecuación 1 está dada por: Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 10 Guía 4 t y (t ) = C (t ) ⋅ Φ (t , t 0 ) ⋅ x0 + C (t ) ⋅ ∫ Φ (t ,τ ) ⋅ B (τ ) ⋅ u (τ ) ⋅ dτ + D(t ) ⋅ u (t ) , t ≥ t0 El concepto de observabilidad está relacionado con el siguiente problema: dado el sistema (1) y sus entradas u(t) y sus salidas y(t) sobre un intervalo finito de tiempo [t0, t1], calcular el estado inicial x0. Formalmente demos ahora las definiciones: t0 Definición I: estado observable El estado inicial x0 ≠ 0 del sistema descrito por las ecuaciones (1) se dice que es observable sobre el intervalo [t0, t1] donde t1 es un tiempo finito, si el conocimiento de la entrada u(t) y de la salida y(t) sobre [t0, t1] son suficientes para determinar x0. De otra manera se dice que el estado x0 es inobservlable sobre [t0, t1]. Definición II: sistema completamente observable Si todo estado x(t0) del sistema es observable sobre [t0, t1], el sistema se dice que es completamente observable sobre [t0, t1]. Ya que la respuesta de estado cero (los términos que contienen u en (2)) pueden ser calculados directamente, el problema de la observabilidad del sistema puede ser resuelto considerando que la u=0. Esto es, el problema se hace: dado un sistema (1) y sus respuesta a entrada cero C(t).Φ(t,t0).x0 sobre el intervalo finito [t0, t1], encontrar el estado inicial x0. Esto inmediatamente implica que solo las matrices A y C en el sistema representado por (1) están involucradas en la caracterización de la observabilidad del sistema. Ejemplo 4: Considere el sistema descrito por las ecuaciones [1], donde A, B, C y D son las matrices constantes: 1 1 0 A= B= C = [1 0], D = 0 0 2 , 1 , Entonces tenemos: • x1 = x1 + u , x1 (0 ) = x10 • x 2 (0 ) = x 20 x2 = 2 ⋅ x2 + u , y la ecuación de la salida: y = x1 De todo este conjunto de ecuaciones notamos que y depende solamente de x1, y que el mismo es completamente independiente de x2. Esto es, el conocimiento de u(t) e y(t) sobre un intervalo finito [0, t1] es suficiente para determinar x10 pero no x20. Usando la definición I concluimos que en este sistema solo los estados del tipo [x10, 0]T son observables. Entonces por definición II, este sistema no es completamente observable. La siguiente figura muestra un diagrama de simulación de este sistema, haciendo notar que el bloque de la dinámica de la segunda componente no se encuentra conectado a la salida: Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 11 Guía 4 Definiciones para los sistemas discretos: En las definiciones I, II de observabilidad para sistemas lineales continuos en el tiempo, si reemplazamos las t por k (o sea, reemplazamos: t0 por k0, t1 por k1, y [t0, t1] por [k0, k1]), obtenemos las definiciones de observabilidad para los sistemas discretos en el tiempo. Caracterización de la observabilidad En esta sección presentaremos el criterio para determinar la observabilidad de sistemas lineales. Primero consideraremos el sistema lineal variante en el tiempo no-forzado: • x(t ) = A(t ) ⋅ x(t ) , t ≥ t0, x(t0) = x0 [Ec. 4] y (t ) = C (t ) ⋅ x (t ) Teorema: El sistema continuo descrito por las ecuaciones de estado [4] es completamente observable sobre [t0, t1], si y solo si, las columnas de la matriz C(t).Φ(t) son linealmente independientes sobre [t0, t1], donde Φ(t) es la matriz de transición del sistema no-forzado. En forma equivalente, el sistema es completamente observable sobre [t0, t1], si y solo si: t1 6 (t 0 , t1 ) = ∫ Φ * (t , t 0 ) ⋅ C * (t ) ⋅ C (t ) ⋅ Φ(t , t 0 ) ⋅ dt t0 es no singular. Más aún, el estado inicial x0 es: t1 x0 = 6 −1 (t 0 , t ) ⋅ ∫ Φ * (t , t 0 ) ⋅ C * (t ) ⋅ y (t ) ⋅ dt t0 No haremos la demostración formal, que se encuentra descrito en el libro de la bibliografía (Jamshidi), pero podemos hacer notar que si C(t).Φ(t) no tiene columnas linealmente independientes, es obvio que no podremos distinguir luego de transcurrido un tiempo, cómo fue que el estado inicial afectó a cada una de las componentes. De forma equivalente, existe el teorema para sistemas discretos: Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 12 Guía 4 Teorema: El sistema discreto descrito por las siguientes ecuaciones de estado: x(k+1) = A(k).x(k), k ≥ k0, x(k0) = x0 Ec. [5] y(k) = C(k).x(k) es completamente observable sobre [k0, k1], si y solo si las columnas de la matriz C(k).Φ(k) son linealmente independientes sobre [k0, k1], donde Φ(k) es la matriz de transición del sistema sin forzar. Para los sistemas l.t.i., estos dos teoremas pueden ser trasladados a un criterio fácilmente aplicable sobre las matrices A y C. Nuevamente notar, que debido a la invarianza en el tiempo, no necesitamos especificar un intervalo de tiempo [t0, t1] ó [k0, k1], como hicimos en el caso variante en el tiempo. Teorema: Los sistemas l.t.i. no-forzados: • x(t ) = A ⋅ x(t ) , y(t ) = C ⋅ x(t ) y x(k +1) = A ⋅ x(k ) , y(k ) = C ⋅ x(k ) donde A y C son matrices constantes de dimensiones nxn y mxn respectivamente, son completamente observables, si y solo si, la matriz de observabilidad de dimensión (m.n)xn C C⋅A ϑ = C ⋅ A2 : C ⋅ A ( n −1) es de rango n. Ejemplo 5: Calculemos para el ejemplo anterior, cuyas matrices recordemos eran: 1 0 1 A= B= C = [1 0], D = 0 0 2 , 1 , Por lo tanto la matriz de observabilidad de este sistema será: C 1 0 ϑ= = C ⋅ A 1 0 que como vemos es de rango 1, y por lo tanto dicho sistema no es completamente observable como lo habíamos mencionado anteriormente. Ejemplo 6: Consideremos el sistema descrito por la siguientes ecuaciones en la forma canónica de observabilidad: Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 13 Guía 4 − 6 1 0 x = − 5 0 1 ⋅ x − 7 0 0 y = [1 0 0] ⋅ x , Por lo tanto, la matriz de observabilidad es: 0 0 C 1 ϑ = C ⋅ A = − 6 1 0 C ⋅ A 2 31 − 6 1 Que como podemos observar, es de rango completo, y por lo tanto el sistema es completamente observable. • Sistemas SISO: Concentrémosnos ahora en sistemas de una sola salida, lineales e invariantes en el tiempo (l.t.i.). Para dichos sistemas la matriz de observabilidad es cuadrada, y si la misma es de rango n, significa que la misma es no-singular y que es invertible. A partir de un sistema cualquiera en general, podríamos realizar la misma búsqueda que hicimos para la forma canónica de controlabilidad, ahora para la forma canónica de observabilidad. Pero en este caso lo dejamos como ejercicio al lector, teniendo en cuenta que envés de separar la inversa de la matriz T en vectores filas, ahora para llegar a un resultado provechoso, debemos separar la matriz T en vectores columnas. Lo que obtendremos es que: C 0 C ⋅ A ⋅ t = 0 3 2 C ⋅ A 1 La matriz que premultiplica al vector columna t3 es la matriz de observabilidad del sistema ϑ. El vector t3 podemos calcular como: 0 −1 t 3 = ϑ ⋅ 0 1 y esto siempre lo podemos realizar, si la matriz de observabilidad es invertible. De manera semejante al problema de controlabilidad podemos enunciar los pasos a seguir para obtener la forma canónica de observabilidad para un sistema cualquiera: PASO 1: De las matrices A y C del sistema original, construyamos la matriz de observabilidad como: Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 14 Guía 4 C C⋅A ϑ = C ⋅ A2 : C ⋅ A (n −1) PASO 2: Calculamos la última columna de la matriz de transformación como: 0 −1 : tn = ϑ ⋅ 0 1 PASO 3: Determinamos la matriz de transformación como: T = A (n −1) ⋅ t n ... A 2 ⋅ t n A ⋅ t n t n PASO 4: Conociendo T y calculando su inversa T -1, determinamos las matrices en el nuevo espacio de estado (que es el de la forma canónica de observabilidad): Ao = T -1.A.T Bo = T -1.B Co = C.T [ ] Notar que un cambio de estado por una matriz de transformación lineal no cambia la condición de observabilidad del sistema. En otras palabras: la observabilidad del sistema es invariante ante cambios de la base del espacio de estado. Observar que si el sistema es completamente observable podemos hallar su forma canónica de observabilidad, y si no lo es, no lo podemos hallar. El camino inverso también se dá: siempre que podemos encontrar la forma canónica de observabilidad de un sistema entonces el sistema es completamente observable, y si no podemos encontrar la forma canónica de observabilidad entonces el sistema no es completamente observable. O sea: Siempre podemos encontrar la forma canónica de observabilidad de un dado sistema, si y solo si el sistema es observable. Esto nos da pie a una definición equivalente a observabilidad de un sistema para los sistemas l.t.i. de una sola entrada, que completaremos su significado en los próximos capítulos de diseño: Definición III: Equivalente a completamente observable para sistemas l.t.i. de una sola entrada Un sistema l.t.i. (con una entrada escalar) representado por el par de matrices de observabilidad (A, C) es observable, si para todo polinomio αe(s) de grado n existe un estimador de ganancia L tal que la ecuación característica del error de estimación es: det(s.I-A+L.C) = αe(s) También existe otra definición equivalente de observabilidad: Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 15 Guía 4 Definición IV: Equivalente a completamente observable Un sistema l.t.i. (con una entrada escalar) representado por el par de matrices de controlabilidad (A, C) es observable, si cada modo de A está conectado a la salida del sistema a través de la matriz C. Como en el caso de la controlabilidad, para un sistema que sea completamente diagonalizable, en su representación modal debemos requerir que todos los ci sean distintos de cero, pero además que todos los autovalores de A sean distintos entre sí. Notar que si la matriz A es llevada a una forma de Jordan completa (los autovalores iguales tienen un solo autovector), el sistema igualmente puede llegar a ser observable. Materiales y equipos 1 Computadora con sistema operativo Windows 95 o superior 1 Programa MATLAB 5.2 o superior. Procedimiento Parte I. Tutorial. Herramientas de análisis de modelos: Las siguientes funciones son útiles para analizar, realizar transformaciones de coordenadas de estado en ellos y derivar realizaciones canónicas en el espacio de estado para modelos únicos LTI o arreglos de modelos LTI en el espacio de estado. Realizaciones en el espacio de estado canon Realización canónica en el espacio de estado ctrb Matriz de controlabilidad ctrbf Forma de escalera de controlabilidad gram Gramians de controlabilidad y observabilidad obsv Matriz de observabilidad obsvf Forma de escalera de observabilidad ss2ss Transformación de coordenadas de estado ssbal Balanceo diagonal de realizaciones en el espacio de estado 1. Realizar los ejemplos 2, 3, 5 y 6, que aparecen en la introducción teórica, usando MATLAB. Discretice los sistemas y use un tiempo de muestreo de 0.1s Sugerencia: en MATLAB el comando para encontrar el rango de una matriz es rank. Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 16 Guía 4 Ejemplo 2: En MATLAB: Ejemplo 3: En MATLAB: Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 17 Guía 4 Ejemplo 5: En MATLAB: Ejemplo 6: En MATLAB: Análisis de resultado 1. Resuelva las preguntas que se hacen en la guía usando MATLAB. Bibliografía MATLAB Getting Started with MATLAB The Math Works Inc. Biblioteca Personal Ogata, Katsuhiko. Ingeniería de Control Moderna, Segunda Edición Edit. Prentice Hall. 1993. México. Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2010 18