Variables de estado. - Facultad de Ingeniería
Anuncio

Facultad de Ingeniería
Bioingeniería
Control de Procesos
METODO DEL ESPACIO DE ESTADO
ESTADO: El estado de un sistema dinámico es el conjunto más pequeño de variables
( denominadas variables de estado) tal que el conocimiento de esas variables en t = t0,
conjuntamente con el conocimiento de la entrada para t ≥ t0, determinan completamente el
comportamiento del sistema en cualquier tiempo t ≥ t0 .
VARIABLES DE ESTADO: Las variables de estado de un sistema dinámico son las variables
que constituyen el conjunto más pequeño de variables que determinan el estado del mencionado
sistema dinámico.
Se requieren al menos n variables x1 , x2, …, xn para describir completamente el comportamiento
dinámico del sistema de orden n. Estas son las n variables de estado.
Conocidas estas variables n variables en el instante de tiempo inicial y las evoluciones de las
entradas para tiempos t ≥ t0 , el estado futuro del sistema queda completamente determinado. Es
importante aclarar que las variables de estado pueden ser medibles o no, que representen
magnitudes físicas o solo matemáticas. Pero deben ser las mínimas n ( equivalentes a los n
elementos de almacenamiento de energía hablando de sistemas dinámicos físicos para un sistema
de orden n).
ESPACIO DE ESTADO: El espacio de n-dimensiones cuyos ejes coordenados consisten en el
eje x1 , el eje x2 , … , el eje xn , se denomina Espacio de Estado. Cualquier estado se puede
representar por un punto en el espacio de estado.
ECUACIONES EN EL ESPACIO DE ESTADO: Para la representación del modelo dinámico
de sistemas en el espacio de estado se usan tres tipos de variables.
♦ Las variables de entradas,
♦ las variables de salida
♦ las variables de estado.
La ventaja del uso en representación en espacio estado es que éste puede en su modelado
representar sistemas tanto continuos como discretos, lineales o no lineales variables o invariantes
en el tiempo y generalmente usados en notación matricial.
Se usará en este curso solo para sistemas lineales a coeficientes constantes invariables en el
tiempo, que en el campo temporal, se puede expresar por el siguiente sistema de ecuaciones:
x 1’
x 2’
…
x n’
= a11 x1 + a12 x2 + … + a1n xn
= a12 x1 + a22 x2 + … + a2n xn
= … … …
… …
= an1 x1 + an2 x2 + … + ann xn
+
+
+
+
b11 u1 + b12 u2 + … + b1m um
b21 u1 + b22 u2 + … + b1m um
…
…
bn1 u1 + bn2 u2 + … + bnm um
que representada en forma de notación matricial es:
x’ = A x + B u
siendo x’ el vector derivada en el tiempo de las variables de estado de dimensión n por uno
( Columna)
Guía de Espacio de Estado
1/9
Facultad de Ingeniería
Bioingeniería
Control de Procesos
u el vector de entrada ( también denominado de control) de dimensión
A la matriz de estado de dimensiones n por n ( cuadrada)
B la matriz de entrada de dimensiones m por n
y1 = c11 x1 + c12 x2 + … + c1n xn
y2 = c21 x1 + c22 x2 + … + c2n xn
…=
…
…
yr = cr 1 x1 + cr 2 x2 + … + cr n xn
+
+
+
+
d11 u1 + … + d1m um
d21 u1 + … + d2m um
…
…
dr 1 u1 + … + dr m um
expresada en notación vectorial:
y=Cx+Du
siendo y el vector de salida de dimensión r por uno ( columna)
C la matriz de Salida de dimensión r por n
D la matriz de transmisión directa de dimensión r por m
D
Y
U
B
+
x’
∫ dt
x
C
+
A
Si se considera para cada par entrada_salida se tendrá una función de trasferencia, las que se
pueden obtener si se aplica Transformada de Laplace y considerando condiciones iniciales nulas.
SX(s) = A X + B U(s)
[ I S - A ] X(s) = B U(s)
recordar que X(0) = 0 y por tanto
y por tanto X(s) =[ I S - A ] - 1 B U(s) y la salida
Y(s) = C [ I S - A ] - 1 B U(s) + D U(s) = { C [ I S - A ] - 1 B U(s) + D } U(s)
Siendo G(s) la Matriz Función de Transferencia
= G(s) U(s)
Recordar que la matriz inversa de [IS - A ] es igual a la matriz adjunta dividida el determinante
que es un polinomio de grado n, siendo sus raíces los autovalores de la matriz y a su vez los
polos de la Función de Transferencia.
Se recuerda que se obtiene la misma función de transferencia no dependiendo del juego de
variables de estado que se definió por tanto pueden existir infinitos juegos de estado para la
misma F(s) ésta solo depende del sistema físico.
Guía de Espacio de Estado
2/9
Facultad de Ingeniería
Bioingeniería
Control de Procesos
Ejemplo:
Sea un sistema genérico de 3er Orden para una sola entrada y una salida del tipo:
a3 y´´´ + a2 y ´´ + a1 y ´ + a0 y = b0 u
tiene como Función de transferencia F(s) = Y(s) / U(s) previamente dividiendo por a3 ambos
miembros para despejar la 3ra derivada, se obtiene:
Y(s)
F(s) =
( b0 / a3 )
=
s3 + ( a2 / a3 ) s 2 + ( a1 / a3 ) s + ( a0 / a3 )
U(s)
Para poder encontrar la representación en espacio de estado, esto es el sistema de ecuaciones de
primer orden de grado n = 3 se pude hacer:
• La salida al estado x1 ; y = x1
• la y´ = x2
• la y´´ = x3
por lo tanto se puede armar el siguiente sistema de ecuaciones de primer orden:
x´1 = x2 = 0 x1 +
1 x2 +
0 x3 +
0u
0 x2 +
1 x3 +
0u
x´2 = x3 = 0 x1 +
x´3 = -( a0 / a3 ) x1 - ( a1 / a3 ) x2 - ( a2 / a3 ) x3 + ( b0 / a3 ) u
por tanto se pueden representar en notación matricial los valores de A, B, C y D
0
1
0
0
A =
0
0
1
; B =
0
; C = 1 0 0 ; D = 0
a0
a1
a2
b0
−
a3
a3
a3
a3
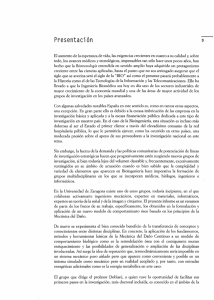
a su vez si se representa por diagrama de flujo considerando nodo de entrada a u, nodo de salida
y nodos comunes a los estados y sus derivadas. Tomando la notación temporal pero
representando la integración en el campo transformado se obtiene el siguiente diagrama de flujo
:
u b0 / a3 x´3 1 /s
x3
1 x´2
1/s x2
1
x´1 1/s x1
1
Y
- a2 / a3
- a1 / a3
- a0 / a3
• Caso a
Sea un sistema genérico de 3er Orden con una entrada y una salida del tipo:
a3 y´´´ + a2 y ´´ + a1 y ´ + a0 y = b0 u + b1 u´ + b2 u´´
tiene como Función de transferencia F(s) = Y(s) / U(s)
b0 + b1 s + b2 s 2
Y(s)
F(s) =
=
U(s)
a3 s3 + a2 s 2 + a1 s + a0
Guía de Espacio de Estado
3/9
Facultad de Ingeniería
Bioingeniería
Control de Procesos
para poder aplicar la regla de MASON se divide ambos miembros por a3 s3 quedando:
(b0 / a3 s3 )+ ( b1 a3 s2 ) + ( b2 / a3 s)
F(s) =
1 + ( a2 / a3 s ) + (a1 / a3 s2 ) + (a0 / a3 s3)
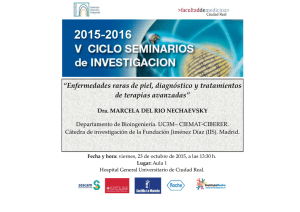
Analizando solo el denominador se encuentran 3 lazos que se deben tocar
representación parcial suponiendo que se tocan todos en x´3 es:
u
1
x´3 1 /s
x3
1
x´2
- a2 / a3
1/s
x2
1
- a1 / a3
x´1
1/s
x1
por tanto su
b0 / a3
Y
- a0 / a3
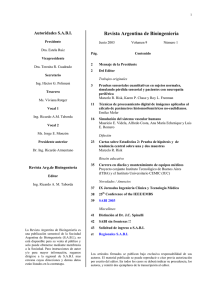
El análisis del numerador indica
tres caminos que deben pasar por un, dos y tres integradores, siendo sus respectivos
determinantes adjuntos de valor unitario, lo que equivale al gráfico :
b2 / a3
u
1
x´3 1 /s
x3
1
- a2 / a3
x´2
b1 /a3
1/s
x2
1
- a1 / a3
x´1 1/s
x1
b0 / a3
b1
a3
b2
a3
Y
- a0 / a3
Del gráfico se desprende que la expresión en Espacio de Estado es:
x′1
x′2
x′3
0
=
0
a
− 0
a3
1
0
a
− 1
a3
0
1
a
− 2
a3
x1
0
x2 + 0 u
x3
1
X´ = A X + B U
;
;
b0
a3
y =
x1
x2
x3
+ 0 u
Y=CX +DU
Si se cambian los valores de las variables de estado definiendo otro conjunto, esto es
un vector x = T z , de tal forma que la matriz T sea invertible y de orden n por n, si se
reemplaza en :
Guía de Espacio de Estado
4/9
Facultad de Ingeniería
Bioingeniería
x’ = A x + B u
como
x=Tz
y
y
Control de Procesos
y=Cx+Du
x’ = T z’
z’ = T - 1 x’
por tanto
,
por tanto multiplicando por T - 1 :
x’ = T z’ = A T z + B u
z’ = T - 1 A T z + T - 1 B u
y la salida será
y=CTz+Du
para el caso particular en que z1 = x3 , z2 = x2 y z3 = x1 se tiene que T es diagonal secundaria
unitaria cuya inversa es idéntica
0 0 1
T = 0 1 0 = T −1
1 0 0
por lo que el diagrama de flujo debe quedar:
• Caso b
b2 / a3
u
1
z´1 1 /s
z1
1
z´2
- a2 / a3
a0
z1 ′ − a
3
z2 ′ = 1
z3 ′
0
−
a1
a3
0
0
b1 /a3
1/s
z2
1
z´3 1/s
- a1 / a3
−
z3
b0 / a3
Y
- a0 / a3
a2
a3 z1 1
b
0 z2 + 0 u ; y = 0
a3
1 z3 0
z1
b2
z2 + 0 u
a3
z3
b1
a3
• Caso c
Para otra configuración en la que todos los lazos se tocan en x1 del diagrama de flujo se
representa:
b1 / a3
u
b0 / a3 x´3 1 /s
- a0 / a3
x3
1
b2 /a3
x´2
1/s
x2
1
x1´ 1/s
- a1 / a3
Guía de Espacio de Estado
x1
1
Y
- a2 / a3
5/9
Facultad de Ingeniería
Bioingeniería
La representación en Espacio de Estado :
a
− 2 1 0
a3
x′1
x1
a1
x′2 = −
0 1 x2 +
a3
x′3
x3
a
− 0 0 0
a3
x´ = A x
=
B u ;
Control de Procesos
b2
a3
b1
u ;
a3
b0
a3
x1
y =
1 0 0
x2
x3
+ 0 u
y = Cx + Du
• Caso d
En la siguiente configuración, todos los lazos se tocan en x´3 pero los caminos de entradas van
directo a los nodos de derivadas siendo la salida el estado x1 .
.
β1
u
β0
x´3 1/s
x3
β2
1
- a2 / a3
x´2 1/s
x2
1
- a1 / a3
x´1 1/s
A
1
Y
- a0 / a3
x ′1
0
1
0
x1 β 2
x ′2 =
0
0
1
x 2 + β1 u ;
x ′3 − a 2 / a 3 − a1 / a 3 − a 0 / a 3 x 3 β 0
x =
x1
x + B u;
x1
y = 1 0 0 x2 + 0 u
x3
y =
C
x + Du
Téngase en cuenta que ahora la Función de Trasferencia será:
b0 + b1 s + b2 s 2
Y(s)
F(s) =
=
U(s)
=
3
2
=
a3 s + a2 s + a1 s + a0
β0/ s3 + β1 /s2 ( 1 + a2 / a3 s)+ β2 s ( 1 + a2/a3s + a1 / a3 s2 )
1 + a2 /a3 s + a1 /a3 s2 + a0 /a3 s3
reordenando se obtiene :
Y(s)
F(s) =
=
U(s)
β0 a3+ β1 ( a3s + a2 )+ β2 ( a3 s2 + a2 s + a1 )
a3 s3 + a2 s 2 + a1 s + a0
Guía de Espacio de Estado
6/9
Facultad de Ingeniería
Bioingeniería
Control de Procesos
por tanto:
b0 a 3 a 2 a1 β 0
b1 = 0 a 3 a 2 β 1 lo que equivale a
b2
0 0 a3 β 2
β 0 1 / a 3 − a 2 / ( a 3 * a 3) ( a 2 * a 2 − a1 * a 3 * a 3) / ( a 3 * a 3 * a 3) b 0
β1 = 0
1 / a3
− a 2 / ( a 3 * a 3)
b1
β2
0
0
1 / a3
b2
• Caso e
Se puede hacer la siguiente distribución manteniendo la unión de los lazos en x´3 con una entrada
única unitaria y los caminos que se unen a la salida, como se indica en el siguiente diagrama de
flujo:
β1
β2
u
1
x´3 1 /s
x3
- a0 / a3
1
x´2
1/s
x2
- a1 / a3
1
x´1 1/s
x1
β0
Y
- a2 / a3
x ′1 − a 2 / a 3 1 0 x1 β 2
x ′ 2 = − a1 / a 3 0 1 x 2 + β 1 u ;
x′ 3 − a 0 / a 3 0 0 x 3 β 0
x1
y = β 0 β1 β 2 x 2 + 0 u
x3
quedando la siguiente Función de transferencia:
b0 + b1 s + b2 s 2
Y(s)
F(s) =
=
U(s)
=
=
a3 s3 + a2 s 2 + a1 s + a0
=
β0/ s3 + β1 /s2 ( 1 + a2 / a3 s)+ β2 s ( 1 + a2/a3s + a1 / a3 s2 )
1 + a2 /a3 s + a1 /a3 s2 + a0 /a3 s3
β0 a3+ β1 ( a3s + a2 )+ β2 ( a3 s2 + a2 s + a1 )
a3 s3 + a2 s 2 + a1 s + a0
Siendo los valores de β identicos al caso anterior en función de b
Guía de Espacio de Estado
7/9
Facultad de Ingeniería
Bioingeniería
Control de Procesos
• Caso f
La siguiente propuesta responde a la expansión de la Función de Transferencia en Fracciones
parciales ( sistema desacoplado
Y(s)
b0 + b1 s + b2 s 2
1
α1
α2
α3
F(s) =
=
=
+
+
U(s)
a3 s3 + a2 s 2 + a1 s + a0
a3 ( s - p1) ( s - p2 )
( s - p3 )
x1´ 1/s
x1
p1
α1
1/a3
1/a3
x 2´
1/s
α2
x2
u
y
p2
α3
1/a3
x 3´
1/s
x3
p3
x′1 p1 0
x′2 = 0 p 2
x′3
0
0
0 x1 1
0 x2 + 1u ;
p 3 x3 1
y = [α1 α2
x1
α3 ] x 2 + 0 u
x3
• Caso g
Expresión de polos y ceros cuando existen polos múltiples (en este caso dos).
b0 + b1 s + b2 s 2
Y(s)
F(s) =
=
U(s)
1
=
a3 s3 + a2 s 2 + a1 s + a0
x1´ 1/s
a3
α1
+
( s - p1)2
α2
+
( s - p2 )
α3
( s - p3 )
x1
p1
u
1/a3
x 2´
1/s
x2
α2
α1
y
p2
1/a3
x 3´
1/s
x3
α3
p3
Guía de Espacio de Estado
8/9
Facultad de Ingeniería
p1
x ′1
x′ 2 = 0
0
x′3
Bioingeniería
0
0 x1
0 x2 + 1 / a3 u ;
p 3 x3 1 / a3
1
p1
0
Control de Procesos
x1
α3 ] x 2 + 0 u
x3
y = [α1 α2
• Caso h
Expansión en fracciones parciales donde existe un par de polos complejos conjugados:
b0 + b1 s + b2 s 2
α3
α1s + α 2
Y ( s)
1
F ( s) =
=
=
+
2
2
3
2
U ( s ) a3 s + a 2 s + a1 s + a0 a3 ( s + 2ζωs + ω ) ( s − p3 )
x′1
0
x′ 2 = − ω 2
x′ 3
0
1
− 2ζω
0
0 x1 1 / a 3
0 x2 + 1 / a3 u ;
p3 x 3 1 / a 3
y = [α1 α2
x1
α3 ] x 2 + 0 u
x3
α1
X2’
X2
X1’
X1
α2
-2ζ
ζω
-ω
ω2
α3
p3
• Caso i
Expresión en función de ceros y polos:
F ( s) =
( s − z1 )( s − z 2 )
b0 + b1 s + b2 s 2
b2
Y ( s)
=
=
U ( s ) a3 s 3 + a 2 s 2 + a1 s + a0 a3 ( s − p1 )( s − p 2 )( s − p3 )
x′1
p1
x′ 2 = 0
x′ 3
0
p2 − z 2
p2
0
0 x1
0
1 x2 + 0 u ;
p3 x3 1 / a3
x1
y = [(p1-z1) 0 0 ] x 2 + 0 u
x3
Guía de Espacio de Estado
9/9