Mediciones con puentes - Ingeniería en Automatización y Control
Anuncio

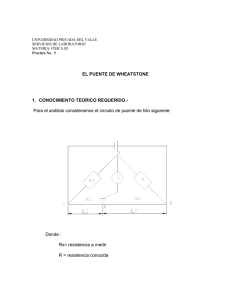
UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi 7. Mediciones con puentes. 7.1. Puentes de CC Básicamente un puente de medición es una configuración circuital que permite medir resistencias en forma indirecta, a través de un detector de cero. Los puentes de corriente continua tienen el propósito de medir resistencias, de valores desconocidos, utilizando patrones que sirven para ajustar a cero (equilibrio del puente). La configuración puente consiste en tres mallas. Se disponen de cuatro resistencias, entre ellas la desconocida, de una fuente de corriente continua y su resistencia interna, y un galvanómetro. Se estudiará la influencia de la sensibilidad del galvanómetro y de la limitación de la intensidad de corriente en los brazos del puente, así como la exactitud del puente con respecto al valor de la incógnita a medir. Existen algunas variantes para medir resistencias muy altas o muy bajas. Figura 7.1 7.1.1. Puente de Wheatstone El puente de Wheatstone tiene cuatro ramas resistivas, una fuente de f.e.m (una batería) y un detector de cero (el galvanómetro). Para determinar la incógnita, el puente debe estar balanceado y ello se logra haciendo que el galvanómetro mida 0 V, de forma que no haya paso de corriente por él. Debido a esto se cumple que: I1R1 = I 2 R2 (7.1) Al lograr el equilibrio, la corriente del galvanómetro es 0, entonces: I1 = I 3 = E R1 + R3 (7.2) I2 = I 4 = E R2 + R x (7.3) Donde Rx es R4 (de la fig. 1), combinando las ecuaciones (7.1), (7.2) y (7.3) se obtiene: R1 R2 = R1 + R3 R2 + Rx (7.4) R1 Rx = R2 R3 (7.5) Resolviendo: Instrumentos y Mediciones Instymed_t7_v1.doc 1 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Expresando Rx en términos de las resistencias restantes: Rx = R3 R2 R1 (7.6) R3 se denomina Rama Patrón y R2 y R1 Ramas de Relación. El puente de Wheatstone se emplea en mediciones de precisión de resistencias desde 1• hasta varios M•. Errores asociados La principal fuente de error se encuentra en los límites de las tres resistencias conocidas. Otros errores pueden ser la insensibilidad en el detector de cero, cambios en las resistencias debido a los efectos de calentamiento por la corriente, los problemas causados por las f.e.m térmicas en el circuito si se miden resistencias de valores muy bajos y por último, los errores debidos a la resistencia de contactos en la medición de valores de resistencias muy bajos. Equivalente Thévenin Sirve para calcular la sensibilidad del galvanómetro para pequeños desequilibrios. Se determina a partir de los terminales del galvanómetro c y d de la figura 7.1, ya que el parámetro de interés es la corriente del galvanómetro. Se deben realizar dos pasos para encontrar el equivalente de Thévenin: 1) Encontrar el voltaje equivalente entre las terminales c y d cuando se desconecta el galvanómetro. Ecd = Eac − Ead = I1 R1 − I 2 R2 Donde E R1 + R3 Entonces se obtiene: I1 = I2 = Ecd = E ( R1 R2 − ) R1 + R3 R2 + R4 E R2 + R4 (7.7) 2) Determinar la resistencia equivalente a las terminales c y d, con la batería remplazada por su resistencia interna. Figura 7.2 Como la resistencia interna de la batería es muy baja se puede despreciar para su equivalente de Thévenin de la figura 7.2, debido a esto se observa que entre los puntos a y b hay un cortocircuito cuando Rb es 0•. La resistencia de Thévenin es: Instrumentos y Mediciones Instymed_t7_v1.doc 2 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi RTH = R1 R3 RR + 2 4 R1 + R3 R2 + R4 (7.8) El equivalente de Thévenin del circuito del puente de Wheatstone se reduce a una f.e.m. (Ecd) dada por la ecuación (7.7) y una resistencia interna (RTH) dada por la ecuación (7.8) como se muestra en la figura 7.3. Figura 7.3 Cuando el galvanómetro se conecta a las terminales del circuito equivalente de Thévenin, la corriente es: Ig = Ecd RTH + Rg (7.9) Donde Ig es la corriente del galvanómetro y Rg su resistencia. Limitaciones El límite superior para la resistencia a medir se debe a la insensibilidad del desequilibrio, debido a los valores elevados de las resistencias, que hace alta la resistencia equivalente de Thévenin, reduciendo la corriente del galvanómetro. El límite inferior se debe a la resistencia de los alambres de conexión y a la resistencia de contacto de los bornes. La primera se puede calcular o medir, pero la resistencia de contacto es difícil de calcular y medir, por eso no se usa este puente para resistencias bajas. Es por eso que se utiliza el puente de Wheatstone para resistencias que van desde 1• hasta varios M•. Para el cálculo del error de insensibilidad se debe observar el siguiente gráfico: Figura 7.4 Si se considera a R1 y a R2 fijos, una batería fija E con una resistencia Re, y un galvanómetro de menor corriente discernible •Ig y resistencia Rg. Ahora se puede medir distintas Rx variando R3 para satisfacer el equilibrio del puente de la ecuación (7.4). Instrumentos y Mediciones Instymed_t7_v1.doc 3 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Si ahora se expresa el error •x para cualquier Rx, si •x es mucho menor que Rx, y considerando a A y B de acuerdo a lo siguiente: A = Re R1 + Re R2 + R1 R2 y B = R g + R1 + R2 Queda como el error mínimo de insensibilidad: einsens.mínimo = ∆I g ER1 R2 ( AB + R1 Rg R2 ) 2 (7.10) 7.1.1.1 Puente de Wheatstone para R grandes La medición de resistencias muy altas como la de aislamiento de un cable o la fuga de un capacitor supera la capacidad del puente de Wheatstone ordinario. Como se requiere voltajes altos para obtener una sensibilidad de deflexión suficiente. La corriente de fuga se elimina mediante algún circuito de protección. Un alambre de protección, que rodea la superficie aislante de la terminal, intercepta la corriente de fuga y la regresa a la batería, evitando que entre al circuito puente. La figura 7.5 esquematiza la protección: Figura 7.5 Otra forma es conectar la protección a la resistencia de tres terminales para evitar la pérdida de corriente externa al circuito puente. La alta resistencia se coloca sobre dos terminales aisladas. Los dos terminales principales se conectan a la Rx y el tercer terminal es el punto en común de las resistencias R1 y R2. La figura 7.6 esquematiza lo explicado: Figura 7.6 Instrumentos y Mediciones Instymed_t7_v1.doc 4 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi 7.1.2. Puente de Thompson (Kelvin) El puente Kelvin es una modificación del puente Wheatstone y proporciona un incremento en la exactitud de las resistencias de valor por debajo de 1•. Puente de hilo (Thompson) En la figura 7.7 se muestra el circuito de puente de hilo, representado por la resistencia R y. Ry representa la resistencia del alambre de conexión de R3 a Rx. Si se conecta el galvanómetro en el punto m, Ry se suma a Rx, resultando una indicación por arriba de Rx. Cuando se conecta en el punto n, Ry se suma a la rama de R3, ya que R3 indicará más de lo real. Si el galvanómetro se conecta en el punto p, de tal forma que la razón de la resistencia de n a p y de m a p iguale la razón de los resistores R1 y R2. Figura 7.7 Rnp = Rmp R1 R2 (7.11) La ecuación de equilibrio queda Rx + Rnp = R1 (R3 + Rmp ) R2 (7.12) Sustituyendo la ecuación (7.11) en la (7.12), se tiene R1 Rx + R1 + R2 R2 R R y = 1 R3 + R2 R1 + R2 R y (7.13) Operando queda Rx = R1 R3 R2 (7.14) Como conclusión, la ecuación (7.14) es la ecuación de equilibrio para el puente Wheatstone y se ve que el efecto de la resistencia Ry se elimina conectando el galvanómetro en el punto p. Puente doble de Kelvin Debido a que la ecuación (7.11) es difícil de lograr físicamente, se agrega un segundo par juego de ramas de relación (a y b), mostrado en la figura 7.8 Instrumentos y Mediciones Instymed_t7_v1.doc 5 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Figura 7.8 Se conecta el galvanómetro en el punto p con el potencial apropiado entre m y n, para eliminar la resistencia Ry. La relación entre las resistencias a y b debe ser igual a la relación R1 y R2. Con esta hipótesis también se demostrará que Ry no influye en el resultado final. El galvanómetro será cero cuando el potencial en k sea igual al potencial en p, o Ekl = Elmp, donde: Ekl = R2 R2 E= R1 + R2 R1 + R2 (a + b) R y I R3 + R x + a + b + R y (7.15) y (a + b)R y b Elmp = I R3 + × a + b a + b + R y (7.16) Cuando se logra el equilibrio, G debe ser cero y Ekl debe ser igual a Elmp, queda: (a + b )R y (a + b)R y R2 b I R3 + Rx + × = I R3 + R1 + R2 a + b + R y a + b a + b + R y Simplificando y operando se obtiene: R3 + Rx + (a + b )R y a + b + Ry = bRy R1 R3 R + R2 + R3 + 1 × R2 R2 a + b + Ry Despejando Rx y simplificando se obtiene: Rx = bR y R1 R3 + R1 a + b + Ry R1 a − R2 b (7.17) Si aplicamos la condición preestablecida a/b=R1/R2 nos queda la ecuación (7.14), donde la resistencia Ry no tiene efecto en la medición. Acoplando en forma mecánica a con R1 y b con R2, se logra medir resistencias desde 1• hasta aproximadamente 10µ•. 7.2.Puentes de CA Los puentes de corriente alterna son más versátiles y en consecuencia tienen más aplicaciones que los puentes de C.C. Se usan en medidas de resistencias en C.A., inductancia, Instrumentos y Mediciones Instymed_t7_v1.doc 6 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi capacidad e inductancia mutua, en función de patrones conocidos y relaciones conocidas de elementos. Su forma básica consiste en un puente de cuatro ramas, una fuente de excitación (alterna) y un detector de cero (audífono, amplificador de C.A. con osciloscopio, etc.). Para bajas frecuencias se puede utilizar la línea de potencia como fuente de excitación; y a altas frecuencias se puede utilizar un oscilador. La forma general de un puente de C.A. se presenta en la figura 7.9. Figura 7.9 El equilibrio se alcanza cuando la respuesta del detector es cero o indica corriente nula. El ajuste para obtener una respuesta nula se hace variando una o más ramas del puente. Las condiciones de equilibrio son: EBA = EBC ó I 1Z 1 = I 2 Z 2 (7.18) Para la corriente del detector (condición de equilibrio), la corriente es: I1 = E Z1 + Z 3 (7.19) I2 = E Z2 + Z4 (7.20) Al sustituir las ecuaciones (7.19) y (7.20) en la (7.18) se obtiene: Z 1Z 4 = Z 2 Z 3 (7.21) o la ecuación escrita en términos de admitancias: Y 1Y 4 = Y 2Y 3 (7.22) La ecuación (7.21) es la ecuación general para el equilibrio de un puente de CA. Igualdades complejas para el equilibrio Si las impedancias se escriben en forma polar, entonces la ecuación (7.21) es simplemente una igualdad de números complejos: Z1 Z 4 = Z 2 Z 3 (7.23) θ 1+θ 4 =θ 2 +θ 3 (7.24) Donde (7.23) es la igualdad de módulos de las ramas opuestas y (7.24) es la igualdad de argumentos de ramas opuestas. Instrumentos y Mediciones Instymed_t7_v1.doc 7 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Para determinar si un puente es ajustable o no, se deben verificar ambas igualdades (7.23) y (7.24). Criterio de selección de ramas La elección de los elementos del circuito para el ajuste del equilibrio del puente representa ordinariamente un compromiso entre varios factores, tales como la exactitud (se busca elementos exactos y estables, en orden de exactitud son la resistencia, el capacitor y el menos exacto la inductancia), y la facilidad y rapidez con que se llega al equilibrio. También influyen otros factores para la elección final de las ramas, como ser el cambio de la capacidad parásita al variar un elemento, y la posibilidad de equilibrio, lo cual se evalúa con el ángulo de convergencia γc. Angulo de convergencia, lugares de variación de parámetros La rapidez con la cual se llega al equilibrio depende del ángulo de convergencia (γc), ya que el mismo determina en cuantos pasos se llegará al cero. Para calcular γc se considera que no se cumple con 7.23, esto es: Z 1Z 4 − Z 2 Z 3 = d (7.25) Donde d representa un pequeño desequilibrio, es decir, que cuando d tiende a cero se logra el equilibrio. En general para lograr el equilibrio se varían al menos dos parámetros S1 y S2 (complejos). Se define γc como: ∂d ∂d γc = arg − arg ∂S 1 ∂S 2 (7.26) ∂d ∂d Donde y se representan cada uno una recta en el plano complejo (Fig ∂S 1 ∂S 2 7.10) Im Lugar de S1 Lugar de S2 Re γc Figura 7.10 A estas rectas se las denomina lugares de ajuste de S1 y S2. Para determinar el equilibrio se hacen ajustes sucesivos de S1 y S2 obteniendo distintos valores de d en cada caso. Se supone que se obtiene exactamente el mínimo en cada ajuste. La aproximación n al cero, d=0, se ve que consta de una sucesión de pasos en zigzag (Fig.7.11). El número de pasos necesarios depende del ángulo γc=β−α donde β es argumento del lugar S1, y α el argumento del lugar S2. Instrumentos y Mediciones Instymed_t7_v1.doc 8 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Lugar de S1 Im Lugar de S2 γc Re Figura 7.11 Si el ángulo γc es pequeño, la convergencia al equilibrio requiere más ajustes que para ángulos grandes. Si γc=90°, la convergencia es más rápida, por lo tanto se llega más rápido al equilibrio (d=0). El mínimo valor de γc está dado por: γc mínimo= arc cos(1-r) (7.27) Donde r es la resolución del galvanómetro o detector. 7.2.1. Puente de Maxwell Este puente de C.A. se utiliza para medir una inductancia desconocida en términos de una capacitancia conocida. Una de las ramas de relación tiene una resistencia y una capacidad en paralelo (Figura 7.12): Figura 7.12 Escribiendo la ecuación (7-21) en términos de Zx (impedancia de la rama desconocida) se obtiene: Zx = Z 2Z 3 Z1 (7.28) Al escribir utilizando la admitancia Y1: Zx = Z 2 Z 3Y 1 (7.29) Observando a la figura 7.12, se obtiene que: Z2=R2; Instrumentos y Mediciones Z3=R3; y Instymed_t7_v1.doc Y1 = 1 + jwC 1 R1 (7.30) 9 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Donde w es la frecuencia angular (2πf). Sustituyendo estos valores en (7-29) da: 1 Zx = Rx + jwL x = R 2 R 3 + jwC 1 R1 (7.31) Cuya parte real es: Rx = R 2 R3 R1 (7.32) Y la imaginaria: Lx = R 2 R 3C1 (7.33) Cabe aclarar que las resistencias se expresan en ohms, las inductancias en henrys y las capacitancias en faradios. Limitaciones El puente de Maxwell se limita a la medición de Q medio (1<Q<10). Esto se fundamenta utilizando la ecuación (7.24), puesto que los ángulos de fase de R2 y R3 suman 0° y la suma de los ángulos de las ramas 1 y 4 también será 0°, por lo tanto el ángulo de una bobina de Q alto sería cercano a +90°, pero el ángulo de fase de la rama capacitiva debería estar en –90° lo que significaría R1 muy grande lo que es poco práctico; por esta razón, para estos valores de Q se utiliza el puente de Hay. Para Q<1 existen problemas de convergencia debido a la aparición del denominado equilibrio deslizante por valores de Q bajos (se genera una interacción entre los controles). El procedimiento normal para equilibrar el puente de Maxwell consiste en ajustar R3 hasta que obtener el equilibrio inductivo y luego ajustar R1 hasta obtener el equilibrio resistivo, repitiéndose este proceso hasta el equilibrio definitivo. 7.2.2. Puente de Hay Como primera característica de este puente, se puede mencionar su utilización para la medición de inductancias. En la figura 7.13 se observa la configuración clásica del puente Hay. A primera vista este puente no difiere demasiado de su equivalente de Maxwell, salvo que en esta ocasión el capacitor C1 se conecta en serie con la resistencia R1, por lo tanto para ángulos de fase grandes la resistencia R1 debe tener un valor muy bajo. Es esta pequeña diferencia constructiva la que permite su utilización para la medición de bobinas de Q alto (Q>10). Figura 7.13 Si se sustituyen los valores de impedancias de las ramas del puente en la ecuación general de equilibrio de los puentes de CA (7.23), se obtiene: Instrumentos y Mediciones Instymed_t7_v1.doc 10 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi j Z 2 = R2 Z 3 = R3 Z x = R x + jwL x wC1 Sustituyendo los valores anteriores en la ecuación de equilibrio: Z1 = R1 − j R1 − (Rx + jwL x ) = R2 R3 wC1 (7.34) Si se distribuye: R1 R X + Lx jRx − + jwL x R1 = R2 R3 C1 wC1 Separando los términos reales de los imaginarios: R1Rx + Lx = R2 R3 C1 (7.35) Rx = wL x R1 wC 1 (7.36) Como en ambas ecuaciones (7.35) y (7.36) están presentes los términos Lx y Rx, se deben resolver simultáneamente, entonces: 2 Rx = Lx = w 2 C1 R1 R2 R 3 1 + w 2C1 R1 2 2 (7.37) 2 (7.38) R2 R3C1 1 + w 2 C1 R1 2 Como se puede observar en las expresiones (7.37) y (7.38) tanto la inductancia como la resistencia desconocida se encuentran en función de la velocidad angular w, por lo tanto sería necesario conocer con exactitud la frecuencia de la fuente de voltaje. Observando la figura 7.14: Rx Z wLx Rx 1 wC x Figura 7.14 Z Se deduce que: tan θ L = X L wL X = =Q R RX tan θ C = XC 1 = R wC1R1 Si los ángulos de fase son iguales, sus tangentes también lo son: tan θ L = tan θ C ⇒ Q = 1 wC1 R1 (7.39) Si se reemplaza (7.39) en las igualdades (7.38), se obtiene: Instrumentos y Mediciones Instymed_t7_v1.doc 11 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Lx = R2 R3C1 1 + 1 2 Q (7.40) Para Q>10, el término (1/Q2 )<1/100, por lo tanto: Lx ≅ R2 R3C1 (7.41) En resumen se puede decir que para la medición de inductores con Q alto (Q>10) se debe utilizar el puente Hay. En el caso de inductores de Q bajo (Q<10) el método apropiado es la medición a través del puente Maxwell. 7.2.3. Puente de Owen El puente Owen es ampliamente utilizado para la medición de inductores, más precisamente para aquellas inductancias con factor de calidad bajos (Q<1). Su configuración clásica se representa en la figura 7.15, y observando esta se puede remplazar la ecuación de equilibrio para los puentes de C.A.: Z1 Z 3 = Z 2 Z 4 (7.42) 1 1 − (Rx + jwL x ) = R2 R3 − jwC 3 jwC1 (7.43) Por lo tanto: Si se igualan las partes reales e imaginarias, se obtiene: Rx = C1 R2 C3 Lx = C1 R2 R3 R2 C1 ˜ E (7.44) Detector C3 R3 Lx Rx Figura 7.15 Como se puede ver de las ecuaciones (7.44), el equilibrio del puente es independiente de la frecuencia, y como el término C1R2 es conocido, dicho equilibrio depende exclusivamente de los elementos ajustables C3 y R3. 7.2.4. Puente de Schering El puente de Schering se utiliza para la medición de capacitores, siendo de suma utilidad para la medición de algunas de las propiedades de aislamiento (tgδ) , con ángulos de fase muy cercanos a 90°. Instrumentos y Mediciones Instymed_t7_v1.doc 12 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi En la figura 7.16, se muestra el circuito típico del puente Schering, nótese que la rama patrón (rama 3) solo contiene un capacitor. Por lo general, el capacitor patrón es de mica de alta calidad para las mediciones generales de capacidad, o puede ser de un capacitor de aire para mediciones de aislamiento. Los capacitores de mica de buena calidad, poseen pérdidas muy bajas y por consiguiente un ángulo aproximado de 90°, en cambio un capacitor de aire tiene un valor muy estable y un campo eléctrico muy pequeño, por lo tanto el material aislante se puede conservar fuera de cualquier campo fuerte. Puesto que el capacitor patrón está en la rama 3, las sumas de los ángulos de fase de las ramas 2 y 3 será 0° + 90° = 90°, para cumplir con la ecuación de equilibrio, se necesita que los ángulos de fase de las ramas 1 y 4 sea de 90°. La conexión en paralelo del capacitor C1 con el resistor R1 proporciona a la rama 1 un ángulo de fase pequeño, ya que en general la medición desconocida Zx posee un ángulo de fase menor de 90°. Figura 7.16 Planteando la ecuación general de equilibrio de los puentes de CA. Z1 Z 4 = Z 2 Z 3 (7.45) Aplicando la ecuación (7.45) al circuito de la Figura 7.16: Z x = Z 2 Z 3Y1 (7.46) Por lo tanto: Rx − − j 1 j + jwC1 = R2 wC x wC 3 R1 Si se expande: Rx − RC jR2 j = 2 1− wC x C3 wC 3 R1 Igualando los términos reales y los imaginarios: Rx = R2 C1 C3 C x = C3 R1 R2 (7.47) Si se observa en el circuito de la Figura 7.16, se puede ver que las dos variables que se escogen para el ajuste del equilibrio son el capacitor C1 y el resistor R2. El factor de potencia o cos ϕ de la impedancia desconocida será: Instrumentos y Mediciones Instymed_t7_v1.doc 13 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi PF = Rx Zx (7.48) Para ángulos muy cercanos a 90°, la reactancia es casi igual a la impedancia, por lo tanto: Rx = wC x R x Xx Entonces queda definido el factor de disipación D o tgδ de un dieléctrico (representado por un circuito serie RC) como: PF ≅ tgδ = Rx = wC x Rx Xx (7.49) Como ya hemos visto, el factor de calidad de una bobina se define como Q=Xl/Rl, por lo tanto de la ecuación (7.49) se observa que tg δ es el recíproco del factor de calidad (Q), entonces: tg δ = 1/Q (7.50) La tg δ es un factor que indica la calidad del capacitor, da la noción de cuan cercano esta el ángulo de fase del capacitor del valor ideal de 90°. Con las ecuaciones (7.47) en la expresión para tg δ, se tiene: tgδ = wC1 R1 (7.51) Si el resistor R1 tiene un valor fijo, el dial del capacitor C1 se puede calibrar directamente en función de la tg δ. Esta es la utilidad práctica del puente de Schering, ya que el término w aparece en la expresión de la tg δ por lo tanto la calibración del dial C1 solo se conserva para la frecuencia a la cual se calibró el dial. Se puede utilizar una frecuencia diferente multiplicando el dial C1 por la relación de las dos frecuencias. El puente de Wien se desarrollará en la unidad temática 9. 7.3.Ilustraciones de Puentes Típicos: A continuación se presentan algunas imágenes de los puentes de medición comerciales más comunes. Instrumentos y Mediciones Instymed_t7_v1.doc 14 UNIVERSIDAD NACIONAL DE QUILMES INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Cátedra de Instrumentos y Mediciones – Docente: Adrián E. Ronconi Circuito interno de puente de Wheatstone comercial 7.4.Temas a desarrollar: 1. 2. 3. 4. Deducir y hallar la expresión del error de insensibilidad del puente de Wheatstone. ¿En qué consiste el denominado Test de lazo de Murria? ¿De qué depende el error de acoplamiento en un puente doble de Kelvin? ¿Cómo es la configuración práctica de un puente de Schering para medir la tgδ? ¿Cómo deben ser las distintas ramas del puente? 7.5.Bibliografía: 1) 'Instrumentación Electrónica Moderna y Técnicas de Medición' de W. Cooper. Editorial Prentice Hall 1982. 2) 'Análisis de medidas eléctricas' de E. Frank, Editorial Mc Graw Hill 1969 3) ‘Manual Yokogawa IM2755’ Instrumentos y Mediciones Instymed_t7_v1.doc 15