TEMA 9. ACONDICIONAMIENTO PREDIGITAL y RECURSOS
Anuncio

9
Acondicionamiento Pre-Digital y
recursos compartidos en la Etapa
Frontal
9.1 Introducción. Motivación del capítulo: Multiplexado por División del Tiempo
(TDM)
Después del acondicionamiento de la señal analógica basado en funciones electrónicas
tradicionales como la adaptación de impedancias o la compatibilidad eléctrica entre
etapas, es necesario un acondicionamiento previo a la digitalización basado en la
inclusión de circuitos de muestreo y retención (circuito S&H1) y en el uso conjunto del
CAD.
La motivación del tema reside en el procedimiento de consecución del multiplexado
por división del tiempo (TDM; Time División Multiplexing). Esta técnica se emplea
con la finalidad de compartir el CAD en un equipo electrónico de adquisición de
señales, ya que se aprovecha que éste último suele ser más veloz que la mayoría de las
señales involucradas en la Ingeniería. En este caso, es necesaria la inclusión de
amplificadores con cierto grado de adaptación, de ganancia programable, con el fin de
poder adaptar señales de cualquier amplitud al margen de entrada del CAD. Por otra
parte a menudo es necesaria la inclusión de circuitos S&H que retengan la señal de
entrada al convertidor durante el tiempo de conversión.
El empleo de canales de comunicación compartidos lleva consigo la introducción de
multiplexores analógicos y matrices de conexión. Se realiza un estudio cualitativo de su
funcionamiento, y se tratan sus límites operativos, descritos a través de sus parámetros.
9.2 Interruptores analógicos
Se emplean en situaciones donde no es posible trabajar con relés. Éstos se emplean en
situaciones de muy baja resistencia en estado de conducción, o donde las tensiones
involucradas superen en términos absolutos los 15 V o, por el contrario sean de algunos
milivoltios.
1
Acrónimo de circuito de muestreo y retención: Sample and Hold circuit.
JJGDR-UCA
1
Instrumentación Electrónica. Juan José González de la Rosa
9.2.1 Definición y tipos
Un interruptor analógico consta de un transistor (generalmente de efecto campo, FET)
que opera entre los estados de corte y saturación por la acción de una señal de control
digital. El interruptor analógico ideal se representa mediante un conmutador que posee
impedancia nula cuando está cerrado e impedancia infinita cuando está abierto. El
interruptor real suele ser un transistor de efecto campo y se modela mediante una
resistencia en conducción y dos corrientes de fugas, según muestra la figura 1.
D
S
G
Rs
Vs
Iseñal
Ron
D
Ids
IFET
S
IL
Iss
vo
RL
control
G
Fig. 1. Modelo de un interruptor analógico real
y su inserción en el equipo de test.
Cuando se insertan interruptores analógicos en los equipos de medida se cometen
errores debido al alejamiento de los interruptores reales de los modelos ideales.
9.2.2 Errores y parámetros
9.2.2.1 Errores de conexión
Se estudian en este apartado los errores que se cometen al conectar los interruptores en
condiciones de CC y CA.
Los errores que se cometen en continua son muy pequeños y se cuantifican mediante
el factor de pérdidas por inserción (IL; Insertion Loss), dado por:
RL
IL(dB ) = 20 log
R L + RON
,
donde RON es la resistencia en conducción del interruptor y RL es la resistencia de carga
donde se conecta. Obsérvese que cuando la resistencia en conducción es nula las
pérdidas por inserción también lo son.
El error relativo que se comete resulta ser entonces:
2
JJGDR-UCA
9 Etapa Frontal
ε=
vo − v s
R s + RON
=
vs
Rs + RON + R L
Estos errores suelen ser pequeños debido a que la resistencia de conducción y la de la
señal suelen ser despreciables frente a la resistencia de carga, que es en general la de
entrada de un instrumento.
Cuando la señal de entrada al interruptor analógico es alterna, hay que tener en
cuenta las capacidades parásitas del interruptor y de la carga.
9.2.2.2 Parámetros
Los parámetros de los interruptores analógicos se clasifican en las siguientes categorías:
•
•
•
Contacto.
Conmutación.
Control.
9.3 Multiplexores analógicos
Un multiplexor analógico selecciona una de entre varias entradas analógicas y la conduce
a su salida. La selección se realiza para una determinada combinación de señales de
control que determinan la palabra digital asociada a la entrada de interés.
9.3.1 Esquema interno y tipos
La figura 2 muestra el esquema interno funcional de un modelo real. Se aprecia en ella
que todos los interruptores analógicos se conectan al mismo punto.
Fig. 2. Esquema interno básico y tabla de verdad del multiplexor de 8
canales de entrada DG528.
Posee también entradas de borrado (“reset”), de habilitación del dispositivo
(“enable”), y de transferencia de la dirección seleccionada (“write”). Este circuito retiene
la palabra digital de selección de canal en una cadena de biestables “cerrojo” (“latches”).
Estos últimos facilitan la conexión al microprocesador, ya que así no es necesario aplicar
constantemente el código de selección del canal; se aplicará una vez, durante un
intervalo de tiempo, y en presencia de la señal de escritura. La figura 3 presenta su
estructura interna simplificada.
JJGDR-UCA
3
Instrumentación Electrónica. Juan José González de la Rosa
Fig. 3. Estructura interna simplificada del multiplexor DG528.
Si están involucradas señales analógicas diferenciales se emplean modelos que
conducen dos de las líneas de entrada correspondientes a la entrada diferencial hacia las
dos líneas de salida. La situación se muestra en la figura 4.
Fig. 4. Esquema funcional y tabla de verdad del multiplexor de 4 canales
diferenciales DG529.
9.3.2 Parámetros y errores
Ya que los multiplexores analógicos están formados por interruptores, sus parámetros
serán los propios de los segundos, más los derivados de la interconexión de varios
interruptores analógicos y del control digital.
9.3.2.1 Deriva de la resistencia de conducción
Este es un parámetro de conjunto que establece la máxima diferencia en la resistencia de
conducción entre canales. Vine dado por:
∆RON =
4
RON ,máx − RON ,mín
RON ,med
JJGDR-UCA
9 Etapa Frontal
Esta desviación en la resistencia de conducción de los canales influye en el factor de
rechazo al modo común de multiplexores diferenciales, cuando éstos se emplean en
multiplexado de bajo nivel, compartiendo un mismo amplificador diferencial. La
expresión que lo relaciona es:
Zc
RON
CMRR =
∆Z c ∆RON
−
Zc
RON
donde los parámetros sin incrementos son valores medios, y Zc es el valor medio de la
impedancia de modo común de cada canal de salida del multiplexor diferencial hasta
tierra. Esta expresión permite comprobar que, para que el CMRR sea infinito la
variación relativa de la impedancia de modo común debe igualar a la variación relativa
de la resistencia de conducción, situación muy poco probable.
También puede darse la circunstancia de que la variación de la resistencia de
conducción sea cero, en cuyo caso es el desapareamiento de las impedancias de modo
común el que determina el CMRR; o que el apareamiento sea perfecto y sea la
disparidad de las resistencias de conducción la que determine el CMRR. Por ejemplo, si
la carga, Zc, es resistiva podemos calcular:
Zc
10 6 Ω
10 6 Ω
RON
220 Ω
220 Ω
CMRR =
=
=
(0,07 ⋅ 220) Ω
(0,07 ⋅ 220) Ω
∆Z c ∆RON
0
0
−
−
−
6
6
220
Ω
220 Ω
Zc
RON
10 Ω
10 Ω
=
10 7
= 64935,065
7 ⋅ 22
En este caso, el CMRR no depende de la frecuencia.
En el caso de que la impedancia de modo común sea reactiva (un condensador) el
CMRR se degenera con la frecuencia según una respuesta paso-baja. En efecto:
Zc
RON
CMRR =
=
∆Z c ∆RON
−
Zc
RON
1
j 2πfC
RON
∆Z c
∆RON
−
1
RON
j 2πfC
Si se supone apareamiento perfecto de las impedancias de modo común ∆Zc=0, y
resulta:
JJGDR-UCA
5
Instrumentación Electrónica. Juan José González de la Rosa
1
j 2πfC
RON
1
1
CMRR =
=
=
∆RON
j 2πfC∆RON
2πfC∆RON
−
RON
La resistencia de conducción produce también un error diferencial a altas frecuencias,
por efecto de carga.
9.3.2.2 Otras fuentes de error conjuntas
Otros parámetros de conjunto para los multiplexores son las corrientes de fuga y las
capacidades parásitas.
9.4 Matrices de conexión
En equipos de medida con múltiples canales es necesario poder disponer de una de las
m entradas en cualquiera de las n salidas. Esta función la desempeñan las matrices de
conexión. Las dimensiones comerciales de mXn contactos suelen ser: 4X4, 8X8, 8X12,
16X8 y 16X16 contactos.
La figura 5 representa el diagrama de bloques de una matriz de conexión 4X4. Las
variables de entrada se notan por Xi y las de salida por Yi. En este caso consta de 16
conmutadores (0-15) cuyo estado se almacena en el dispositivo interno de memoria
interna. El descodificador (obsérvese que no tiene por qué ser de prioridad) de 4
entradas permite seleccionar una de las 16 salidas. La entrada C1 recibe la orden de
transferencia.
Fig. 5. Diagrama de bloques y tabla de verdad de
una matriz de conexión.
A diferencia del multiplexor, se pueden dar situaciones de riesgo, con más de un
interruptor cerrado, por lo que se pueden cortocircuitar varias fuentes de señal,
conectando más de una entrada a la misma salida.
6
JJGDR-UCA
9 Etapa Frontal
9.5 Amplificadores de ganancia programable
Una señal digital puede modificar el comportamiento de un amplificador. Si la magnitud
modificada es la ganancia, se dota al amplificador de la flexibilidad necesaria para
permitir la adaptación automática de la señal al margen de entrada de un CAD.
Se emplean generalmente dos soluciones para controlar digitalmente la ganancia de
un amplificador. La configuración con componentes discretos es muy simple y permite
emplear componentes electrónicos no específicos. Por otra parte, existen circuitos
electrónicos diseñados a tal fin.
9.5.1 Realización con componentes discretos
Es fácil recurrir a ella cuando las señales son unipolares. La figura 6 muestra las dos
topologías más comunes, inversora y no inversora. En ambos casos se observa que una
palabra digital determina el valor de la realimentación negativa y, en consecuencia, de la
ganancia de la configuración.
Fig. 6. Configuraciones de amplificadores con ganancia
programable mediante componentes discretos.
La configuración inversora posee los problemas ya conocidos de inversión de signo y de
impedancia de entrada. Ésta última es pequeña y depende de la ganancia seleccionada.
Además de estos inconvenientes, la resistencia de conducción de cada interruptor queda
en serie con la de realimentación que determina la ganancia elegida por lo que se dan
tres tipos de error adicionales. Un error de linealidad asociado a que la resistencia de
conducción depende de la tensión aplicada, un error de ganancia, y un error de offset de
cero que depende de la ganancia. La configuración no inversora no logra solventar los
problemas derivados de la resistencia de conducción. Para ello existen configuraciones
que eliminan la resistencia de conducción del camino de las señales, como muestra la
figura 7.
JJGDR-UCA
7
Instrumentación Electrónica. Juan José González de la Rosa
Fig. 7. Configuraciones de amplificadores con ganancia programable no inversores que
suprimen del camino de la señal la resistencia de conducción con el fin de eliminar sus
efectos.
9.5.2 Realizaciones integradas
Se comercializan versiones que incorporan resistencias, interruptores y el decodificador
para programar la ganancia, son modelos conocidos los AD524 y AD624 del fabricante
Analog Devices.
9.6 Circuitos de muestreo y retención (S&H)
Ya que el proceso de conversión de analógica a digital de una señal dura un tiempo,
denominado tiempo de conversión, la palabra digital de salida corresponde a uno de los
niveles analógicos de entrada comprendidos dentro de ese intervalo de tiempo. Esta
incertidumbre en la amplitud debe ser inferior a la resolución del CAD; por lo que la
velocidad de la señal no debe exceder un límite a pesar de que el circuito CAD sea veloz.
De ahí que se empleen circuitos de muestreo y retención, S&H.
9.6.1 Límite de operación de un conversor A/D para señal sinusoidal. Incertidumbre en el tiempo de
puerta
La velocidad máxima de cambio de la salida no debe superar la tasa de variación en
voltios en la unidad de tiempo correspondiente a la resolución del cuantificador; esta es
la incertidumbre máxima aceptada. De esta forma, la velocidad de cambio de la señal de
entrada verifica la relación:
dv ∆ Margen
≤
= n
dt t c
2 ⋅tc
(1)
donde tc es la suma del tiempo de conversión y del tiempo entre conversiones. Así
queda garantizado que durante el tiempo que dure la conversión la señal que se va a
digitalizar no cambia más de la resolución.
Para una señal sinusoidal que responda a la expresión
v(t ) = V ⋅ sen(2πft ),
8
JJGDR-UCA
9 Etapa Frontal
Aplicando la expresión (1) se obtiene:
dv
Margen
= V 2πf cos(2πft ) ≤ n
dt
2 ⋅ tc
La velocidad máxima corresponde al coseno unitario. En términos absolutos:
dv
dt
Margen
= V 2πf ≤
2 n ⋅ tc
máx
.
De aquí se obtiene la limitación en frecuencia que ha de tener la entrada:
f ≤ f máx =
Margen
2 ⋅ t c ⋅ V 2π
n
Si el margen de entrada del CAD se adapta a la amplitud de la señal, resulta:
f ≤ f máx, adapt =
Margen
2 ⋅ t c ⋅ V 2π
n
=
2V
2 ⋅ t c ⋅ V 2π
n
=
1
2 ⋅ tc ⋅ π
n
Resulta evidente que, ya que en general el margen de entrada del convertidor supera al
valor pico-pico de la entrada (no tiene sentido la situación contraria), entonces Margen
> 2V, y queda la desigualdad:
f máx , adapt =
1
2 ⋅ tc ⋅ π
n
≤
Margen
1
⋅ n
= f máx
V4
1
422
3 2 ⋅ tc ⋅ π
>1
Por esta razón, si se da la adaptación del margen de entrada la limitación en frecuencia
es mayor, es decir, la frecuencia máxima de operación disminuye:
f ≤ f máx , adapt ≤ f máx
Ejemplo 1. Un CAD de 12 bits tiene un tiempo de conversión máximo de 50 µs. Para una señal
senoidal de entrada adaptada a la entrada del CAD, la frecuencia máxima de operación
resulta de:
f máx, adapt =
1
2 ⋅ tc ⋅ π
n
=
1
2 ⋅ 50 ⋅ 10 −6 ⋅ π
12
≅ 1,55 ( Hz )
Esta limitación operativa es muy elevada y resulta inviable en la mayoría de las
aplicaciones industriales.
La limitación del ejemplo 1 muestra la imposibilidad de convertir valores instantáneos
de señales con frecuencias superiores a la obtenida. Es por tanto necesario interponer
un circuito S&H. En estos circuitos, la muestra de la señal de entrada se almacena en un
condensador durante el tiempo que dure la conversión.
JJGDR-UCA
9
Instrumentación Electrónica. Juan José González de la Rosa
En un circuito S&H, es la incertidumbre en el tiempo de apertura de la puerta, la que
determina la velocidad de respuesta y, en consecuencia, la máxima frecuencia de
operación. Por ejemplo, si al CAD del ejemplo 1 interponemos un circuito S&H con
una incertidumbre de 10 ns, entonces la frecuencia máxima resulta:
f máx, adapt =
1
2 ⋅ tc ⋅ π
n
=
1
2 ⋅ 10 ⋅ 10 −9 ⋅ π
12
≅ 7771,24 ( Hz )
Esto muestra la notable ampliación del margen de frecuencias gracias a la introducción
del circuito S&H.
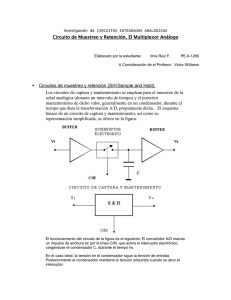
9.6.2 Estructura y ejemplo de circuito S&H basado en amplificadores operacionales
En este apartado se estudia un circuito S&H en configuración integradora, como el que
se muestra en la figura 8. Los diodos son de protección y nunca van a conducir en
régimen de operación normal.
Cada transistor Qi se comporta como un interruptor que permite seleccionar el canal
de entrada i-ésimo, cuando el circuito forma parte de un multiplexor analógico.
Supondremos que su señal de control, Yi, es cero; por lo que está seleccionada su
entrada, vi.
Cuando QB está cortado, la salida mantiene la tensión del condensador (llamado
condensador de retención), ya que no existe camino de descarga porque la resistencia de
entrada al AO es infinita; en este caso el modo de funcionamiento se denomina de
retención o “hold”. Durante este tiempo se realiza la conversión de esta tensión retenida
a una palabra digital.
R1
QA
C
+
Ri
Qi
-
QB
vi(t)
vo(t)
D
i
Yi
YB
+
Fig. 8. Circuito S&H en configuración integradora.
Cuando QB conduce (lo hace en la zona óhmica), se pasa al modo de funcionamiento
de muestreo, modo “sample”. En el circuito equivalente se suele despreciar la resistencia
de conducción de QB y las resistencias de conducción de Qi y de QA se consideran
integradas en las resistencias del circuito integrador resultante. Éste determina la máxima
frecuencia de operación del circuito.
La constante de tiempo del integrador lleva asociada la idea de un tiempo de
muestreo; la constante de tiempo del integrador determina el tiempo de muestreo, según
muestra la figura 9.
10
JJGDR-UCA
9 Etapa Frontal
vo(t)
100%
99%
Vfin
muestreo
t
Fig. 9. Evolución de la señal durante el
tiempo de muestreo.
La salida en función del tiempo es:
(
)
vo (t ) = V fin − V fin − Vin ⋅ e
−
∆t
τ
Si se admite un error del 1 % en la adquisición de la señal indicada, es decir, cuando
alcance el 99% de la tensión final, se considera la medida del tiempo de muestreo
atendiendo a la ecuación anterior, de carga y descarga del condensador. De aquí se
obtiene que el tiempo de muestreo es casi 5 veces la constante de tiempo del integrador:
(
)
0,99 ⋅ V fin = V fin − V fin − 0 ⋅ e
− 0,01 = −e
−
Tmuestreo
τ
; 0,01 = e
−
Tmuestreo
τ
−
Tmuestreo
τ
; 100 = e
= V fin
Tmuestreo
τ
T
− muestreo
τ
⋅ 1− e
→ Tmuestreo = τ ⋅ ln (100) ≅ 4,6 ⋅ τ
Tmuestreo = τ ⋅ ln (100) ≅ 4,6 ⋅ τ
De aquí se sigue que para un modelo de CAD, la señal de control ha de permanecer en
modo de retención durante al menos el tiempo de conversión. A este tiempo hay que
sumarle el tiempo de muestreo, para obtener el retardo total entre el S&H y el CAD.
De esta circunstancia se obtiene el periodo de muestreo mínimo, ya que es imposible
disminuir este tiempo por cuestiones de incertidumbre. En consecuencia, se obtiene la
frecuencia de muestreo máxima del equipo para un solo canal:
f s ,máx =
1
1
=
Ts ,mín t c + 4,6 ⋅ τ
Y la frecuencia máxima de entrada por canal admisible se obtiene aplicando el criterio
de Nyquist:
f i ,máx =
JJGDR-UCA
f s ,máx
2
=
1
2 ⋅ t c + 9,2 ⋅ τ
11
Instrumentación Electrónica. Juan José González de la Rosa
Si no se considera la condición del error del 1 % del valor final, y se trata el circuito
S&H como un filtro paso-bajo, la frecuencia máxima en la entrada es la frecuencia
característica (frecuencia de corte) del integrador:
f i ,máx =
1
2⋅π⋅τ
En este caso, en el que se ha empleado la definición analógica de ancho de banda, la
limitación en frecuencia es mucho menor.
Las figuras 10 y 11 muestran respectivamente un circuito de muestreo y retención y
las señales involucradas.
Fig. 10. Circuito S&H en el capturador de esquemas de PSPICE.
Fig. 11. Curvas involucradas en el proceso de muestreo y retención de una señal sinusoidal con
amplitud creciente.
12
JJGDR-UCA
9 Etapa Frontal
Es interesante comprobar qué sucede cuando aumentamos el valor de la capacidad.
9.6.3 Parámetros y errores
Se dividen en tres grupos; los propios de los estados de muestreo y retención y los
asociados a la transición entre estos estados.
9.6.3.1 Errores en los estados de muestreo y retención
Estado de muestreo:
•
•
•
Error de cero y derivas del error de cero.
Ganancia y error de ganancia.
Deriva térmica de la ganancia.
Estado de retención:
•
Deriva o decremento de la tensión de salida debido al condensador de retención
o almacenamiento. Es menor cuanto mayor sea este condensador. Este
parámetro se usa a menudo para, combinado con la corriente de fugas del
transistor de efecto campo, calcular la capacidad del integrador del circuito
S&H. Por ejemplo:
=C⋅
iC
{
corriente
fugas
→ C=
•
•
∆v o
∆t
{
↔ 30 pA = C ⋅ 1,5
mV
seg
deriva
30
⋅ 10 −12 ⋅ 10 3 = 20 nF
3
2
Aislamiento. Durante el tiempo de retención, si la entrada cambia no debe
cambiar la salida. En la práctica no es así y se evalúa el porcentaje de cambio de
la tensión de entrada que aparece en la salida. El origen de este error es el
acoplamiento capacitivo a través del interruptor. Depende de la frecuencia de la
señal de entrada.
Ruido del amplificador de salida.
9.6.3.2 Errores en las transiciones entre estados
Transición de retención a muestreo:
El transitorio de carga del condensador, hacia el valor final de tensión muestreada,
depende de la amplitud y forma de la señal de entrada. Se detallan las especificaciones
para una señal escalón de amplitud igual al fondo de escala.
El parámetro asociado a esta transición se denomina tiempo de adquisición o
muestreo. El circuito S&H debe permanecer en estado de muestreo durante este
tiempo. Durante este tiempo de muestreo la salida alcanza su valor final, dentro de una
banda de error. Este tiempo es la suma del retardo en la conmutación, el intervalo de
JJGDR-UCA
13
Instrumentación Electrónica. Juan José González de la Rosa
subida y el tiempo de establecimiento. Como hemos visto, el tiempo de muestreo y el
tiempo de conversión determinan el tiempo asociado a cada canal muestreado.
Transición de muestreo a retención:
Durante esta transición, se abre el interruptor semiconductor de control (transistor de
efecto campo QB de la figura 8) pasando su resistencia del valor de la resistencia de
conducción a alta impedancia. La apertura del interruptor no es instantánea ni siempre
se da con el mismo retardo. En consecuencia, en la práctica el valor retenido no
coincidirá con el muestreado. A continuación se consideran los parámetros involucrados
en esta transición.
a) El primer parámetro involucrado se denomina tiempo de apertura. Este es el tiempo
necesario para que el interruptor pase del estado de muestreo al de retención. Este
tiempo se mide desde el 50 % del valor final de la señal de control hasta el instante en
que la salida deja de seguir a la entrada. La situación se muestra en la figura 12. En esta
figura se ha despreciado el retardo entre la entrada del circuito S&H y su salida, que
coincide con la tensión en bornes del condensador.
Estado de
retención
50 %
Señal de
control
Resistencia
interruptor
analógico
Estado de
muestreo
Alta-corte
Bajaconducción
Retardo digital
Retardo interruptor
vi(t)
Incertidumbre
vo(t)
Fig. 12. Situación de medida del tiempo de apertura en
una transición del estado de muestreo al de retención.
Por otra parte, durante la evolución del interruptor desde conducción a corte, la salida se
considera en término medio. En consecuencia, se puede definir un tiempo de apertura
efectivo dado por la siguiente expresión:
t ap _ ef = t ret _ digital +
14
t int_ anal
2
JJGDR-UCA
9 Etapa Frontal
Se considera por tanto, el tiempo de apertura efectivo como la suma del tiempo de
retardo digital dado por el circuito de control y la mitad del tiempo de transición de
impedancias del interruptor analógico.
Se ha considerado nulo el retardo entre entrada y salida debido a la constante de
tiempo del condensador.
b) Incertidumbre en el tiempo de apertura. Es una medida del “jitter”. Se entiende por
tal el desplazamiento en el tiempo de un punto de transición de una señal respecto de su
posición esperada.
c) Error de transferencia de carga. Cuando se pasa al estado de retención, se transfieren
cargas no deseadas al condensador de retención a través de capacidades parásitas.
d) Transitorio de conmutación. Se especifica el tiempo de establecimiento de la
conversión dentro de una banda de amplitudes.
Vimos para nuestro circuito S&H basado en amplificadores operacionales que el
tiempo de muestreo o de adquisición venía dado aproximadamente por:
Tmuestreo = 4,6 ⋅ τ
A este tiempo hemos de añadir el tiempo de estabilización en una situación más general;
ya que no bastará con que se alcance un porcentaje del recorrido final de la señal, sino
que la tensión final que de dentro de una banda de error. En ese caso:
Tmuestreo = 4,6 ⋅ τ + t establec
En consecuencia, la frecuencia máxima de operación, incluyendo el tiempo de
conversión del CAD resulta:
f s ,máx =
1
1
=
Ts ,mín 4,6 ⋅ τ + t establec + t c
Existen otros parámetros de un circuito S&H, relacionados con el margen de
entrada de tensiones, impedancias y otros más relativos al carácter analógico del circuito
y que el lector podrá consultar en cualquier libro de circuitos electrónicos analógicos
aplicados.
Referencias
[1]
[2]
R. Pallás, Adquisición y distribución de señales, Marcombo, Boixareu editores,
1987.
J.J.G. De la Rosa, Circuitos Electrónicos Basados en el Amplificador Operacional.
Problemas, Fundamentos Teóricos y Técnicas de Identificación y Análisis,
Marcombo, Boixareu editores, 2001.
JJGDR-UCA
15