ESTÁTICA DE SISTEMAS
Anuncio

ESTÁTICA DE SISTEMAS
Índice
1. Condiciones necesarias de equilibrio
2
2. Equilibrio de un solido
2
3. Fuerzas internas de un sólido
3
4. Isostatismo e hiperestatismo
4
5. Sólido con punto fijo
5.1. Posicionamiento del sólido . . . . . . . .
5.2. Sistema de fijación isostática e incógnitas
5.3. Fuerzas directamente aplicadas . . . . .
5.4. Ecuaciones de equilibrio . . . . . . . . .
5.5. Resolución . . . . . . . . . . . . . . . . .
5.5.1. Posiciones de equilibrio . . . . . .
5.5.2. Incógnitas de ligadura . . . . . .
.
.
.
.
.
.
.
5
5
5
5
6
6
6
6
.
.
.
.
.
.
.
6
6
7
7
7
7
7
7
6. Sólido con eje fijo
6.1. Posicionamiento del sólido . . . . . . . .
6.2. Sistema de fijación isostática e incógnitas
6.3. Fuerzas directamente aplicadas . . . . .
6.4. Ecuaciones de equilibrio . . . . . . . . .
6.5. Resolución . . . . . . . . . . . . . . . . .
6.5.1. Posiciones de equilibrio . . . . . .
6.5.2. Incógnitas de ligadura . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1.
Condiciones necesarias de equilibrio
Sea el sistema material formado por N partículas materiales.
Si hay equilibrio del sistema, cada partícula deberá estar en equilibrio:
F̄Ei
+F̄Ii
OM i ∧
(1)
= 0̄ (i = 1, ..., N)
F̄Ei +OM i
∧
F̄Ii =
(2)
0̄ (i = 1, ..., N)
Sumando por un lado las ecuaciones (1) para todas las partículas del sistema y por otro las
ecuaciones (2) para todas las partículas del sistema se tiene:
X
X
(1) :
N
X
F̄Ei
N
X
OM i
+
i=1
(2) :
i=1
N
X
F̄Ii
= 0̄
⇒
i=1
∧
F̄Ei = 0̄
(3)
N
X
OM i ∧ F̄Ei = 0̄
(4)
i=1
i
∧ F̄Ii =
OM
i=1
F̄Ei +
N
X
N
X
0̄
⇒
i=1
Las relaciones (3) y (4) son las condiciones necesarias de equilibrio de un sistema, es decir, si
hay equilibrio entonces se satisfacen. Pero no son condición suficiente de equilibrio, es decir, que
el cumplimiento de las relaciones anteriores no implica obligatoriamente el equilibrio del sistema.
Por ejemplo, un par de fuerzas iguales, opuestas y colineales, que satisfacen las relaciones (3)
y (4) pueden producir un movimiento en sistemas deformables.
2.
Equilibrio de un solido
Demostremos que las relaciones (3) y (4) son condiciones suficientes de equilibrio para un
sólido. Dejamos el sólido en reposo en una configuración en la que se satisfacen las citadas
relaciones. Para la primera, se tiene:
N
R
R
X
(A)
G
i
G
G
G
M γ̄ =
F̄E = 0̄ ⇒ γ̄ (t) = 0̄ ⇒ v̄ (t) = v̄0 = 0̄ ⇒ r̄ G (t) = r̄0G
(5)
i=1
La implicación (A) se debe a que no es posible que la masa total del sistema pueda ser nula
(M = 0), porque los sistemas de masa nula tienen movimiento indeterminado en el modelo
matemático definido por las ecuaciones generales de la Dinámica newtoniana.
N
dH̄G
d(¯ĪG . ω̄) X
=
=
OM i ∧ F̄Ei = 0̄
dt
dt
i=1
⇒
¯Ī . ω̄ = ¯Ī . ω̄ = 0̄
G
G
0
(B)
⇒
ω̄(t) = 0̄
(6)
La implicación (B) se debe a que si ω̄ 6= 0̄ la única forma de anulación de ¯ĪG . ω̄ exige un
solido con momento central de inercia nulo en la dirección de ω̄, con lo que obligatoriamente
estaríamos en un caso degenerado de sólido.
El campo de velocidades determinado por (5) y (6) es el propio del reposo luego, si se
cumplen las relaciones citadas, habrá equilibrio obligatoriamente.
3.
Fuerzas internas de un sólido
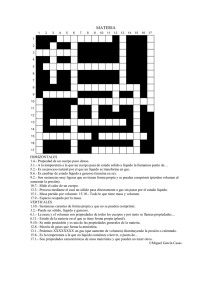
Supongamos que generamos una sección ficticia haciendo pasar un plano por un punto interior M de un
sólido S0 . Las fuerzas de contacto entre las dos caras deσ̄
berán ser un sistema nulo. Consideremos ahora una de
~n
dSxxxxx
las dos caras y definamos su versor normal ~n con senxxxxx dF̄
xxxxx
xxxxx
tido hacia la otra cara. Dentro de esa cara, tomamos
M
una superficie elemental de tamaño dS que contiene a
M. Sea dF̄ la fuerza elemental que hace la cara no considerada sobre la considerada a través de esa superficie
S0
elemental. Definimos el vector esfuerzo como:
dF̄
σ̄ =
dS
y dicho vector representa la exigencia mecánica solicitada sobre el sólido.
A medida que vamos cambiando la sección de corte, vemos que el vector esfuerzo va cambiando, de manera que puede establecerse una correspondencia entre los vectores esfuerzo y las
normales a las secciones (σ̄ = σ̄(~n)). En Elasticidad se demuestra que dicha correspondencia es
lineal y de la forma:
¯ M . ~n
σ̄ = σ̄
¯ M es el tensor de esfuerzos en el punto M.
donde σ̄
Si cambiamos de punto, obtendremos un tensor distinto, de forma que puede establecerse
una correspondencia entre cada punto de un sólido y su tensor de esfuerzos asociado (campo
tensorial). El cálculo de este campo tensorial de esfuerzos es el objetivo prioritario de la teoría
de la Elasticidad.
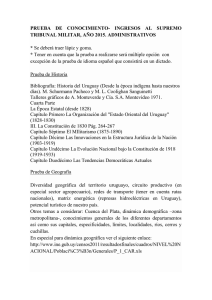
Y
Consideremos un sólido en el que una de
sus dimensiones predomina sobre las otras dos
My
(solido alargado o esbelto). A todos los efecxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
S
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
C
tos, puede considerarse como que la masa del
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
M̄O M
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
F̄
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx dF̄
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
mismo se dispone a lo largo de una curva fictixxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
~
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
Mx xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
X
cia C denominada “linea media”. Si seccionaxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
~ı
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
O
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
~k
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
mos el sólido por un plano Π normal a la linea
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
media C obtendremos una sección S. En ella
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxMz
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
aparecerán las acciones que realiza una cara
sobre la otra. Definamos un sistema de refeN
rencia Oxyz en el O ≡ C ∩ Π, ~k es la normal
exterior y ~ı, ~ están contenidos en el plano Π de la sección. Reduciendo las acciones sobre una
cara en O tendremos:
Z
N > 0 : Tracción
una fuerza:
F̄ =
dF̄
= X~ı + Y ~ + |{z}
N ~k
|
{z
}
N < 0 : Compresión
S
Fuerza normal
Fuerza cortante
Z
un momento: M̄O =
OM ∧ dF̄ = Mx~ı + My~ +
Mz~k
|{z}
|
{z
}
S
Momento flector
Momento torsor
Dividir un sólido en dos no tiene ninguna ventaja en Estática, puesto que el número de
incógnitas adicionales es igual al numero de ecuaciones adicionales de la Estática, que es de
seis.
4.
Isostatismo e hiperestatismo
Sea un sistema material X formado por p partículas y s sólidos sometidos a ligaduras de
contacto.
Sean (α1 , . . . , αf ) un conjunto de f parámetros físicos del problema mecánico (geométricos,
másicos, de fuerza, etc).
Las ecuaciones independientes de la Estática que se pueden plantear para el sistema son:
X
3 ecuaciones escalares por partícula:
F̄E = 0̄
X
X
6 ecuaciones escalares por sólido:
F̄E = 0̄
QM ∧ F̄E = 0̄ ∀Q
luego n = 3p + 6s es el número de ecuaciones de la Estática disponibles.
Sea l < n el número de coordenadas generalizadas que sirven para fijar la configuración del
sistema: (q1 , . . . , ql ).
Sea m el número de incógnitas de contacto que actúan sobre el sistema (interiores y exteriores): (X1 , . . . , Xm ).
Incógnitas del problema mecánico directo: l + m ≥ n
Como las ecuaciones independientes de la Estática son lineales en las incógnitas de contacto,
ya que estas aparecen en los sumatorios de fuerzas y momentos, siempre se pueden poner como:
a11 . . . a1m
X
b
1
1
..
..
..
.
.
=
(7)
. ...
.
. .
an1 . . . anm
Xm
bn
que es un sistema algebraico y lineal de n ecuaciones en las incógnitas (X1 , . . . , Xm ), en el que
los coeficientes tienen las siguientes dependencias:
aij = aij (q1 , . . . , ql ; α1 , . . . , αf )
bi = bi (q1 , . . . , ql ; α1 , . . . , αf )
Las posiciones de equilibrio del sistema X son aquellos valores de las coordenadas generalizadas para los que el sistema algebraico y lineal (7) es compatible.
Por el teorema de Rouché-Fröbenius esto es equivalente a que el rango de la matriz de
los coeficientes y el rango de la matriz ampliada con los términos independientes sean iguales:
.
rang([A]) = rang([A .. b]).
Supongamos que rang([A]) = k ≤ mı́n(m, n) y que:
a11 . . . a1k ..
.. =
. ...
. 6 0
ak1 . . . akk .
si rang([A]) = rang([A..b]) = k ≤ m implica que:
a11 . . . a1k b1 ..
..
.. . ...
.
. = 0, ∀h : k + 1 < h < n
ak1 . . . akk bk ah1 . . . ahk bh (8)
que constituyen un sistema de n − k ecuaciones algebraicas independientes que proporcionan
las posiciones de equilibrio posibles (veremos posteriormente que las posiciones de equilibrio
reales vendrán dadas por algún subconjunto de estas soluciones posibles).
Si todos los términos de una fila de la matriz de los coeficientes del sistema (7) son nulos y el
termino independiente correspondiente no lo es, tenemos una ecuación de la Estática libre de incógnitas de contacto. Esto puede aparecer directamente o conseguirse mediante manipulaciones
algebraicas del sistema (7).
Las condiciones adicionales impuestas por los contactos (de unilateralidad, de no-deslizamiento,
etc) se formulan mediante r inecuaciones que involucran las incógnitas de contacto:
Fi (X1 , . . . , Xm ) ≥ 0 (i = 1, . . . , r)
(9)
Pueden presentarse dos situaciones:
r = 0 : El sistema de ecuaciones (8) proporciona las posiciones de equilibrio.
r > 0 : Hay que añadir al sistema de ecuaciones (8) el sistema de inecuaciones (9) pero sustituyendo las incógnitas de contacto por la solución del sistema (7) en función de las
coordenadas generalizadas:
Fi (X1 (q1 , . . . , ql ), . . . , Xm (q1 , . . . , ql )) ≥ 0 (i = 1, . . . , r)
Se dice que el sistema es isostático en una posición de equilibrio si el sistema algebraico
lineal (7) es determinado (k = m).
Se dice que el sistema es hiperestático en una posición de equilibrio cuando el sistema
algebraico lineal (7) es indeterminado (k < m).
Se llama grado de hiperestatismo del sistema al numero g = m − k
5.
5.1.
Sólido con punto fijo
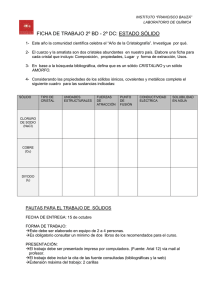
Posicionamiento del sólido
Sea un sólido (S0 ) que se mueve con respecto a un referente inercial (sólido S1 ) de forma que posee un punto fijo (con velocidad y
aceleración permanentemente nulas). Asociado al sólido tenemos un sistema de referencia Oxyz en el que O es el citado punto fijo.
Elegimos una referencia inercial Ox1 y1 z1 con
origen en el punto fijo.
El sólido con punto fijo tiene tres grados de
libertad, considerados a través de los ángulos
de Euler ψ, θ, ϕ que forma la referencia de S0
con la referencia de S1 .
5.2.
z2 ≡ z1
z ≡ z1
LN
θ
G
M̄O
F̄
R̄
O
x1
y
ϕ y3
θ y
2
ψ y
1
ϕ
ψ
x2 ≡ x3x
Sistema de fijación isostática e incógnitas
Con las 6 ecuaciones de la estática del sólido disponibles se pueden calcular, junto a la
incógnita de posición θ, hasta 3 incógnitas de ligadura.
El sistema isostático típico de fijación de un solido con punto fijo esta formado por:
Enlace
Fuerza Incógnita Momento incógnita
Rótula en O R̄ (tres incógnitas) M̄O = 0̄
5.3.
Fuerzas directamente aplicadas
Por la equivalencia de sistemas de fuerzas que actúan sobre un sólido en equilibrio, se
considera la reducción del sistema de fuerzas directamente aplicadas sobre el sólido al centro
de la rótula, para simplificar las ecuaciones:
Resultante: F̄
Momento: M̄O
5.4.
Ecuaciones de equilibrio
X
5.5.
5.5.1.
X
F̄Ei = 0̄ : F̄ + R̄ = 0̄
(10)
OM i ∧ F̄Ei = 0̄ : M̄O = 0̄
(11)
Resolución
Posiciones de equilibrio
Las posiciones de equilibrio están determinadas por las soluciones del siguiente sistema
algebraico que define (11):
M̄O (ψ, θ, ϕ, t) ·~ı = 0
(12)
M̄O (ψ, θ, ϕ, t) · ~ = 0
(13)
M̄O (ψ, θ, ϕ, t) · ~k = 0
(14)
Representa un sistema de tres ecuaciones algebraicas cuyas soluciones ψ ∗ , θ∗ , ϕ∗ proporcionan las configuraciones de equilibrio del sólido con punto fijo.
5.5.2.
Incógnitas de ligadura
Despejando de la ecuación vectorial (10):
R̄(ψ ∗ , θ∗ , ϕ∗ , t) = −F̄ (ψ ∗ , θ∗ , ϕ∗ , t)
6.
6.1.
(15)
z ≡ z1
Sólido con eje fijo
Posicionamiento del sólido
Sea un sólido (S0 ) que se mueve con respecto a un referente inercial (sólido S1 ) de forma que posee un eje fijo (de puntos con velocidad y aceleración permanentemente nulas).
Asociado al sólido tenemos un sistema de referencia Oxyz en el que Oz es el citado eje
fijo. Elegimos una referencia inercial Ox1 y1 z1
con la particularidad de que Oz1 ≡ Oz.
El sólido con eje fijo tiene un único grado
de libertad, considerado a través de la coordenada generalizada θ, el ángulo que forman
los eje Ox y Ox1 .
O′
R̄1
G′
M̄O
G
F̄
θ
O
x1
θ
x
y
R̄
y1
6.2.
Sistema de fijación isostática e incógnitas
Con las 6 ecuaciones de la estática del sólido disponibles se pueden calcular, junto a la
incógnita de posición θ, hasta 5 incógnitas de ligadura.
El sistema isostático típico de fijación de un solido con eje fijo esta formado por:
Enlace
Fuerza Incógnita
Momento incógnita
Rótula en O
R̄ (tres incógnitas)
M̄O = 0̄
Cojinete oscilante en O ′ R̄1 ⊥ OO ′ (dos incógnitas) M̄O′ = 0̄
OO ′ = h~k
6.3.
Fuerzas directamente aplicadas
Por la equivalencia de sistemas de fuerzas que actúan sobre un sólido en equilibrio, se
considera la reducción del sistema de fuerzas directamente aplicadas sobre el sólido al centro
de la rótula, para simplificar las ecuaciones:
Resultante: F̄
Momento: M̄O
6.4.
Ecuaciones de equilibrio
X
6.5.
X
F̄Ei = 0̄ : F̄ + R̄ + R̄1 = 0̄
(16)
OM i ∧ F̄Ei = 0̄ : M̄O + OO ′ ∧ R̄1 = 0̄
(17)
Resolución
6.5.1.
Posiciones de equilibrio
Multiplicando la ecuación (17) escalarmente por ~k se tiene:
~k 0 = ~k · M̄O + · (OO
′
∧ R̄1 ) = ~k · M̄O
⇒
M̄O (θ∗ , t) · ~k = 0
(18)
Esta condición es universal para cualquier sistema de fijación, sea o no isostático. Representa
una ecuación algebraica cuyas soluciones θ∗ proporcionan la configuraciones de equilibrio del
sólido con eje fijo.
6.5.2.
Incógnitas de ligadura
Premultiplicando la ecuación (17) vectorialmente por ~k se tiene:
0̄ = ~k ∧ M̄O + ~k ∧ (OO ′ ∧ R̄1 ) = ~k ∧ M̄O − hR̄1
⇒
R̄1 (θ∗ , t) =
~k ∧ M̄O (θ∗ , t)
h
(19)
Despejando de la ecuación (17):
R̄(θ∗ , t) = −R̄1 (θ∗ , t) − F̄ (θ∗ , t)
(20)