Dinámica de un cuerpo rígido - Facultad de Ciencias Exactas
Anuncio

El movimiento de los cuerpos rígidos (2013)
H. O. Di Rocco
I.F.A.S., Facultad de Cs. Exactas, U.N.C.P.B.A.
May 28, 2013
Abstract
Estudiamos en estas clases el movimiento rototraslatorio de un cuerpo
idealizado como rígido. Las nociones de tensor de inercia, etc. etc. también se introducen.
Se estudian especialmente los casos en que las ruedas son forzadas
a moverse, sea mediante una fuerza aplicada al eje o, por el contrario,
mediante un par provisto por un motor.
ESTA ES UNA VERSIÓN MUY PRELIMINAR; por ahora las …guras están hechas a mano y hay que fotocopiarlas.
1
Nociones preliminares
La rotación no puede describirse mediante un vector.
El movimiento más general de un cuerpo rígido es una traslación seguida de
una rotación. Una de las primeras nociones que es importante tener en cuenta es
que una rotación, a la que puede asignarse una dirección y un sentido, NO puede
describirse mediante un vector. Aunque estemos acostumbrados a pensar en que
un vector describe una magnitud con módulo, dirección y sentido, veremos que
esto no es su…ciente. En efecto, para las magnitudes vectoriales debe valer la
propiedad conmutativa ¡y las rotaciones no son conmutativas! Sin embargo,
si las rotaciones son in…nitesimales, sí vale dicha propiedad así como para las
velocidades angulares (cociente de cantidades in…nitesimales).
Grados de libertad.
Un punto material en el espacio necesita de tres parámetros para especi…car su posición: (x; y; z) ; (r; ; ) ; etc. Dos puntos materiales libres necesitan
6 parámetros, pero si ambos puntos están unidos mediante una barra rígida
(vínculo), ésta restringe los posibles movimientos, necesitando de 5 parámetros, por ejemplo, las tres coordenadas de una de las masas (x1 ; y1 ; z1 ) y las
dos para
p la otra masa, ya que la barra introduce una condición de vínculo,
d2 (x22 + y22 ): Entonces podemos introducir la noción de grados de
z2 =
libertad como
grados de libertad = no coord. libres -no ecs. vínculo.
1
Análogamente, podemos pensar que un plano está formado por tres masas
unidas mediante tres barras rígidas, con lo cual g:l: = 9 3 = 6 : un plano
en el espacio tiene 6 grados de libertad por lo que necesita de seis parámetros: tres para el CM y tres ángulos que nos den la orientación en el espacio.
Generalizando, esto es lo que ocurre para cualquier cuerpo rígido en el espacio.
2
Grados de libertad de un cuerpo rígido
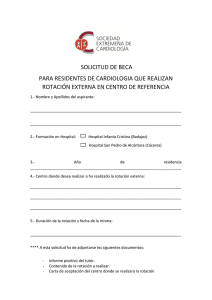
Consideremos un SL inercial S (Oxyz) y, sobre el cuerpo rígido, dos sistemas ubicados en el CM del cuerpo: uno S0 (O0x0y0z0) paralelo al S y otro S (x y z ) …jo
al cuerpo (Figura 1). Más adelante veremos que, sobre todo cuerpo, no importa
su forma, pueden de…nirse los denominados ejes principales de inercia;
tema de la máxima importancia en el estudio de los cuerpos rígidos. O sea que,
para no abusar de sistemas de ejes (¡hay in…nitos sistemas de ejes!), podemos
pensar que la terna S*(x*y*z*) son los ejes principales.
Z*
Z’
Z
Y*
Y’
X’
X*
X
Figura 1
El número de parámetros necesarios para describir el movimiento del rígido
se denomina grados de libertad. Es igual al número de coordenadas libres
menos el número de ecuaciones de vínculo. Entonces, pensando el rígido como
constituído por planos indeformables, y ésos como tres puntos de masa m unidos
2
por varillas de peso despreciable, se llega a que no gl = 6: Son las tres coordenadas del CM más tres correspondientes a la orientación de la terna S respecto
de la S0. Las leyes fundamentales son
F
!
W
3
= maCM
= dL=dt
=
K:
Movimientos elementales del rígido; teorema
de Chasles
Si el cuerpo rígido tiene un punto C …jo, el movimiento más general es una
rotación alrededor de dicho punto C: Pero si el centro de masa se desplaza, los
movimientos elementales son i) traslación y ii) rotación. Se demuestra que el
movimiento más general del rígido es una traslación compuesta con una rotación
alrededor de un eje (teorema de Chasles). En la traslación, no hay movimiento
respecto del CM: es como estudiar el movimiento de éste. Para estudiarlo,
alcanza con las leyes
P =
mvCM
F =
maCM
2
K = mvCM
=2:
Para estudiar la rotación se elige un punto O perteneciente a un eje; todo
punto del rígido ejecuta un movimiento circular respecto de él. Entonces, respecto de un punto en reposo en un S:I: se debe cumplir
! = dL :
dt
4
No unicidad de la descripción de la roto-traslación
Supongamos que O sea un punto arbitrario del cuerpo, por el que pasa el eje de
rotación 1 . O puede coincidir o no con el CM; con respecto al SL, la posición
de un punto P perteneciente al cuerpo viene dada por
rP = rCM + r0P ;
o por
rP = rO + rOP :
Recordando que los SR son cuerpos rígidos, y que hemos mostrado en Cinemática que v = v0 + ! r; signi…ca entonces que
vP = vO + !
!
OP :
(1)
1 El eje de rotación puede ser material (un eje de metal, por ejemplo, sostenido por cojinetes)
o un eje geométrico. Este tema volverá a ser tratado posteriormente.
3
Si tomamos otro punto Q, será
vQ = vO + !
!
OQ;
!
por lo cual, restando, y teniendo en cuenta que OP
vP
vQ = !
!
OP
y entonces
vP = vQ + !
!
OQ = !
!
QP ;
!
!
OQ = QP ;
!
QP
(2)
pero esta descripción es distinta a la dada por la ec. 1. Tanto el punto
O como el Q, se denominan ejes instantáneos de rotación y este concepto
será fundamental para la descripción del movimiento de las ruedas.
Si vQ = 0 tenemos una pura rotación; ! es única (es un vector libre); v es
independiente de ! (piénsese en el movimiento de un cuerpo sobre la super…cie
terrestre). Pero, si por alguna causa se logra (¡o sucede!) que vCM = ! r;
entonces resulta que vQ = vC = 0 (caso de una rueda que no desliza, o sea,
cuando hay pura rodadura).
EJEMPLO DE TRASLACIÓN
EJEMPLO DE ROTO-TRASLACIÓN
Sea una barra rígida que rota alrededor de un eje que pasa por un extremo
de la barra. Se puede describir de dos maneras: i) como una rotación pura
4
respecto de O, ii) una rotación alrededor del CM más una traslación del CM
(…gura 3).
Figura 3
5
Modelo de cuerpo continuo; centro de masa
Aunque a escala atómica la materia es discreta, teniendo en cuenta que un
volumen de 1 m3 contiene alrededor de 1010 átomos, podemos pensar que,
puesto que vamos a trabajar con volúmenes mucho mayores que 1 m3 ; existe
una distribución "continua" de materia, descripta por una cierta densidad. En
general,
= dm=dV kgm 3 ; cuando el cuerpo es fundamentalmente plano,
podemos de…nir una densidad super…cial, como S = dm=dS y, en el caso de los
hilos o cuerdas, una densidad lineal L = dm=dl: El centro de masa se calcula
como
R
R
P
rdm
r dV
mi ri
rCM =
!
=
:
M
M
M
El cálculo de rCM es un típico ejercicio de Cálculo In…nitesimal, demostrándose
que cuando el cuerpo tiene elementos de simetría, el CM está sobre dichos
elementos de simetría.
EJEMPLO 1: sea un semianillo homogéneo de radio R; masa m = l R;
r =Rb
r; b
r = sin i + cos j; entonces
mrG =
Z
l
l rdl =
l
Z
Rb
rRd =
2
lR
Z
5
=2
=2
b
rd =
2
lR
Z
=2
r (sin i + cos j) d :
=2
La integral del seno se anula en el intervalo, por lo cual
mrG = 2 l R2 j;
rG =
2 l R2
2R
j=
j =0:637Rj:
l R
EJEMPLO 2: si ahora consideramos una lámina plana, el problema se puede
considerar de tres maneras diferentes, pero el cálculo especí…co se deja para los
cursos
de Análisis: i) como suma de láminas de espesor dy y longitud 2x =
p
2 R2 y 2 ; ii) como suma de semianillos (resueltos en el párrafo anterior), iii)
usando coordenadas polares, como si fueran porciones elementales de "pizza".
En cualquier caso el resultado es
rG =
5.1
4R
j:
3
Diferencia entre centro de masa y centro de gravedad
El CM se calcula como un valor medio, concepto ya conocido de la estadística
de los errores:
P
mi ri
;
rCM = P
mi
el CG sepodría de…nir de manera totalmente análoga
P
mi gi ri
rG = P
mi gi
y, si los valores de gi fuesen constantes, entonces rCM
rG ; pero si gi =
f (ri ); entonces no. Y, efectivamente, cerca de la super…cie terrestre hay una
pequeña variación de g con la altura. En una montaña su…cientemente alta,
rCM 6= rG : En la mayoría de los casos a tratar en este curso, rCM
rG por
lo que, por comodidad escribiremos CM para el centro de masa y usaremos G
como subíndice (por ejemplo, rG ; etc.)2 .
6
Rotación de un cuerpo rígido en torno de un
eje …jo en un sistema inercial; momento de
inercia
Este tema es fundamental para el estudio de máquinas, motores, etc. Sea un
cuerpo que gira alrededor de un eje arbitrario, al cual puede o no pertenecer el
CM y puede pertenecer o no al cuerpo. Este gira con velocidad angular !
! con
dirección …ja. El primer punto a considerar es que, en general, L =mr v; no
es paralelo a !
! : Para ello consideremos una sola masa m que gira alrededor
del eje, en un cierto plano perpendicular al eje. Mientras que !
! = !k; es sencillo
veri…car que L no es paralelo a !
! ; L precesa. En cambio, dos masas iguales
2 Nunca
habrá una notación que sea inequívoca y que satisfaga a todos.
6
girando alrededor del CM, sí tienen L paralelo a !
! : Todo cuerpo arbitrario
puede pensarse como una parte simétrica (L paralelo a !
! ) más una masa
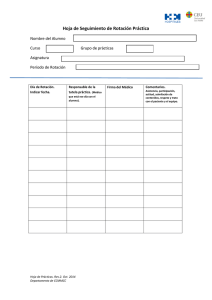
adicional, que da una componente no paralela (ver …gura 4).
W
v
r
L
Relacin entre los vectores (v entrante)
Sea ri el vector posición y Ri = ri sin i ; además, dado que Li = ri
mi vi ; Li = mi ri vi = mi ri Ri !: Su componente z vale Liz = Li cos ( =2
i) =
Li sin i = mi ri Ri ! sin i = mi Ri2 !: Entonces vemos que la componente z es
proporcional a !: Sumando
!
X
X
Lz =
Liz =
mi Ri2 ! = Iz !;
i
i
donde hemos introducido la noción de momento de inercia Iz :
!
Z
X
X
2
2
2
Iz =
mi R i =
mi xi + yi !
x2 + y 2 dV:
i
i
7
Al igual que el cálculo de los CM, el cálculo de I es un típico ejercicio de integración. Para los casos más importantes, están tabulados en los libros de
texto.
EJEMPLO 1
Consideremos dos masas m unidas por un eje muy liviano y que rotan alrededor
de un eje perpendicular al primero. Entonces
L = Lz = 2mrv = 2mr2 ! = Iz !;
L? = 0:
En este caso, M = 0; lo que signi…ca que todas las fuerzas están perfectamente equilibradas (no hay solicitación en los vínculos).
EJEMPLO 2
Vamos a considerar ahora que la barra que une las masas forma un ángulo con
el eje de rotación !: Pero antes retornaremos a algunos conceptos que hemos
introducido en Cinemática.
Para los casos en que L no es paralelo a !, recordemos que el movimiento
de precesión cumple que, para cualquier vector A de módulo constante que rota
alrededor del eje de rotación
dA !
= !
dt
A:
Entonces, para !
! y jLj constantes,
! = dL = !
!
dt
! es paralelo a dL (no a L);
L;
dL = L? d
por lo que
dL
d
= L?
= L? !:
dt
dt
Entonces cuando L NO es paralelo a !
! ; existen fuerzas externas tales que
!ext 6= 0 y j!j = L !: El signi…cado físico (y técnico) de esto es que los
?
vínculos deben trabajar y corren riesgo de romperse.
Entonces, recapitulando, se veri…ca que
=
2
Lz = 2m (r sin ) ! = 2mR2 ! = cte;
mientras que
L? = 2mRr! cos
(varía en dirección);
ahora, al no ser L =cte; implica la existencia de un momento externo de
módulo
M = L? ! = 2mrR! 2 cos :
8
¿Qué fuerzas originan éste momento? Recordemos que la expresión para
cualquier fuerza de naturaleza centrípeta es de la forma Fcp = m! 2 R; por lo
cual M / Fcp :
Estas fuerzas hacen que haya un solicitación sobre los vínculos que corren,
lógicamente, el riesgo de romperse si el ángulo entre las barras di…ere bastante
de =2:En las máquinas y mecanismos en general, se trata de diseñar las cosas
para que L k ! (es lo que se hace en las operaciones de alineación y balanceo).
Es importante recalcar que I depende de la masa Y de su posición respecto del
eje de rotación (esto lo veremos un poco más adelante, vinculado a los nombres
de Huygens-Steiner).
Ejes principales de inercia
A todo cuerpo, simétrico o no, se le puede asignar un conjunto de tres ejes
mutuamente perpendiculares, con respecto a los cuales, se cumple que L==!
!:
Estos ejes se denominan ejes principales de inercia y su cálculo especí…co, queda para cursos más avanzados. Cuando un cuerpo tiene elementos de
simetría, los ejes principales pertenecen a dichos elementos de simetría.
En la operación mecánica de alineado y balanceo, lo que se hace es que
L==!
!:
7
Recalcamos
Cuando L==!
! ; L =I !
! y por lo tanto y
j!j = Iz
(cuando ! =!k)
( : aceleración angular).
Cuando L no es paralelo a !
!;
! = dL ;
dt
con lo cual
dLz
= z = Iz ;
dt
que nos da la variación de ; mientras que
dL?
= ?
dt
nos da la variación de la dirección de !:
En general, el momento de inercia es un tensor, tal que
0
1
Ixx Ixy
A!
etc:
L=@
!;
etc:
en un párrafo siguiente volveremos al particular.
9
8
Volvemos a las ecuaciones de movimiento
En el caso en que L k !; podemos poner L =Iz !; entonces
M=
dL
d (Iz !)
d!
=
= Iz
= Iz ;
dt
dt
dt
entonces, dado j j = M=Iz ; podemos calcular posteriormente
Z
Z
! = !0 +
dt;
= 0 + !dt:
Por lo tanto, si M = 0; el movimiento es circular uniforme, mientras que si
M = cte; el movimiento es circular uniformemente acelerado.
9
Energía cinética del cuerpo rígido; trabajo
Partiendo de
1X
1
1X
mi vi2 =
mi Ri2 ! 2 = Iz ! 2 ;
2
2
2
!
!
si L== ! y L =Iz ! ; entonces Iz = L=! por lo que
K=
K=
1 (Iz !) (Iz !)
1 L2
=
:
2
Iz
2 Iz
Por otra parte, si L no es paralelo a !
!;
1 L2z
:
2 Iz
K=
Si, por efecto de un momento externo, la velocidad pasa de ! i a ! f ; la
energía cinética sufre una variación y por lo tanto se ha efectuado trabajo.
W =
K=
1
Iz ! 2f
2
1
1
Iz ! 2i = Iz
2
2
!2 ;
entonces
dW
1
Iz d ! 2 = Iz !d!
2
d
= Iz
dt = Iz d =
dt
=
y al …nal
W =
Z
W =
Z
si, en particular, L =Iz !
!
10
zd
;
d :
zd
10
Ejemplos de cálculos de los momentos de inercia (alrededor del eje z)
Dejando de lado las integraciones detalladas, mencionamos los siguientes casos:
ANILLO: I = mR2 :
DISCO DELGADO: I = mR2 =2
CÁSCARA CILÍNDRICA: I = mR2
CILINDRO: I = mR2 =2:
Todos los momentos de inercia pueden ponerse en la forma de un producto
de una constante por una masa por una distancia al cuadrado: I = Cmd2 ;
entonces, aunque sea porque así son las dimensiones, llamamos k 2 = Cd2 y
I = mk 2 ;
siendo m la masa y k el denominado radio de giro. Esto hace que la expresión
para el I de cualquier cuerpo tenga la misma forma que para una masa puntual,
mr2 :
Verifiquemos que I depende del eje de rotación: sea un asta homogénea
de largo d que gira alrededor de un eje ortogonal al asta y que pasa por el CM
(al eje que pasa por el CM lo denominamos z 0 ). Sea la masa
m = Sd
Z
Iz0 =
por lo cual
d=2
x2 dm =
d=2
dm = Sdx
1
1
Sd3 =
md2 :
12
12
Si calculamos respecto del eje z; en el borde de la barra:
Z d
1
Iz =
x2 dm = md2 :
3
0
Este resultado es solamente un ejemplo del Teorema de Huygens-Steiner,
que demostraremos en breve.
10.1
Momentos de inercia de cuerpos planos (z
0)
Si una de las dimensiones, por ejemplo z, cumple z 0 (es decir, mucho menor
que las dimensiones en x; y), tendremos
Z
Z
Ix =
y 2 + z 2 dV =
y 2 dV
Z
Z
2
2
Iy =
x + z dV =
x2 dV
mientras que
Iz =
Z
x2 + y 2 dV = Ix + Iy :
Como aplicaciones, recordando que para un anillo, Iz = mR2 y, que por
simetría, Ix = Iy ; entonces Ix = Iy = mR2 =2; para un disco delgado, Ix = Iy =
mR2 =4:
11
11
Ejemplos de aplicación
Sea un disco de masa m2 y radio r (por lo tanto I = mr2 =2) que puede girar
alrededor de un eje que pasa por cojinetes, que lo mantienen vinculado. Una
cuerda está enrollada por el borde, de la que cuelga una masa m1 y se pide
calcular la tensión T de la cuerda y la aceleración de m1 :
O’
m2
O
m1
Las ecuaciones a aplicar son, dado que el cuerpo rota alrededor de un eje de
simetría, por lo cual L k !
F(e) = maG ;
M(e) = I ;
los momentos se toman respecto del punto O; que pertenece al eje de rotación.
Para el caso de pura rodadura, = aG =r:
Entonces tendremos, para el disco
m2 g + T + RS = 0;
ya que el disco no tiene aceleración lineal. Además, tomando momentos
respecto de O:
r T =rT =I :
Para la masa m1 :
m1 g + T =m1 a
2
con a = =r: Entre las dos últimas ecuaciones, que forman un sistema de
2; encontramos a; T: De la primera de ellas, escrita en la forma
rT =
m2 r2 a
;
2 r
12
se deduce, en forma matemáticamente correcta, que m2 a=2 = T; lo que no
debe interpretarse como la ecuación de movimiento de la masa m2 ; ya que ésta
NO tiene una aceleración lineal a: De cualquier manera, combinando
m2 a=2 = T
con
m1 g
T = m1 a;
T =
2m1 m2
2m1 + m2
resultan
a=
2m1
2m1 + m2
g;
g;
de donde se deduce, dividiendo entre m2 ; que
T =
11.1
2m1
2m1 =m2 + 1
g < m1 g:
Otro ejemplo (¡un clásico!)
Un cilindro A de masa m está enrollado en su parte media por un hilo …no, cuyo
extremo B está …jo en el techo. el cilindro cae sin velocidad inicial desenrollando
el hilo. Determinar la tensión T del hilo y la aceleración del centro de masa aG :
T
mg
Primer método: usando fuerzas y momentos
Aplicamos las ecuaciones
mg
T = maG
13
para el movimiento del centro de masa, y
T r = IG =
1 2 aG
mr
2
r
para el movimiento respecto del centro de masa. De ésta última, resulta
T = 12 maG y combinando con la primera, puesta en la forma T = m (g aG ) ;
salen
2
1
aG = g;
T = mg:
3
3
Segundo método: usando la conservación de la energía mecánica
En una posición dada, arbitraria, vale, para la energía total E
E=
1
1
2
+ IG ! 2 + mgyG = cte
mvG
2
2
2
1
1 mr2 vG
2
mvG
+
+ mgyG = cte;
2
2 2 r2
por lo que
3
mv 2 + mgyG = cte
4 G
y derivando respecto del tiempo
dyG
3
dvG
mvG
+ mg
= 0;
2
dt
dt
como, cuando yG dismimuye, aumenta la velocidad, dyG =dt < 0; por lo que
3
mvG aG
2
mgvG = 0
=) aG =
2
g;
3
como antes.
12
Dependencia de I con el eje respecto del cual
se lo calcula; Teorema de Huygens-Steiner (o
de los ejes paralelos)
Vincula los momentos de inercia calculados respecto de un eje arbitrario, con
el calculado respecto del que pasa por el CM, que normalmente es más sencillo
de calcular. Si a es la distancia entre el CM y el eje arbitrario, este teorema
establece que
I = IG + ma2 ;
14
como vamos a demostrar seguidamente.
Z
Z’
Y
Y’
X’
X
Supongamos, para simpli…car, que el CM 2 eje y, tal que x = x0 ; y = y 0 + a;
z = z 0 ; y calculamos
X
X
2
0
Iz =
mi x2i + yi2 =
mi x02
i + (yi + a)
i
=
X
i
02
mi x02
+ a2
i + yi
i
X
mi + 2a
X
mi yi0
= IG + a2 m + 2amyG = IG + a2 m + 0
P
0
0
En detalle, dado que, por de…nición, yG
= ( mi yi0 ) =M , yG
= 0 ya que es la
coordenada del CM en el sistema CM.
2
En el caso de la barra, tratado en el párrafo anterior, IG + m (d=2) =
2
1
2
2
12 md + m (d=2) = md =3; como vimos. En el caso de un anillo, tomando
momentos respecto de un eje que pasa por el borde, I = mR2 =2 + mR2 =
3mR2 =2:
12.1
Relación entre los teoremas de Huygens-Steiner y el
de König
Para una rotación pura,
K=
Iz ! 2
1
1
1
=
Iz0 + ma2 ! 2 = Iz0 ! 2 + ma2 ! 2 ;
2
2
2
2
15
pero la velocidad lineal del CM es vG = a!; por lo cual
K=
1
1
2
Iz0 ! 2 + mvG
;
2
2
que expresa que la energía cinética es la suma de la de rotación alrededor del
CM más la de traslación del CM, como vimos en su momento.
13
Rotación pura: eje instantáneo de rotación
Hemos visto anteriormente que para un cuerpo que rota y traslada, con respecto
de un sistema inercial …jo
vC = vG + ! r
siendo ! r la velocidad del punto …jo al sistema en rotación (pensemos
en un móvil moviéndose sobre la super…cie terrestre). Como hemos visto, la
descripción del movimiento roto-traslatorio no es única; en efecto, puede hacerse
como una rotación alrededor del CM más un desplazamiento de éste o, lo que
suele convenir en el caso de rotación pura, alrededor del eje instantáneo de
rotación. Las velocidades vG y ! son independientes, pero si resultase que
vG = ! r; entonces, para el punto C de contacto, vC = 0: Todo sucede
como si, instante a instante, el cuerpo rotase alrededor de un eje en contacto con
la super…cie. Este es el movimiento de pura rodadura, para el cual se cumplen
! = vG =r; = aG =r:
Otra manera de verlo es la siguiente: el punto C describe una cicloide,
cuyas ecuaciones paramétricas son x = a (1 cos !t) ; y = a (!tq sin !t) ; derivando
con respecto al tiempo, tendremos vx ; vy ; y calculando v = vx2 + vy2 ; resulta
que cuando C toca el suelo, vC = 0:
A continuación vamos a ver tres casos distintos de rotación pura.
CASO 1
actúa una fuerza F aplicada al eje central del cilindro. Queremos averiguar
cuánto valen la fuerza de roce f y la aceleración de la rueda.
F
f
16
P
P
Como siempre, las ecuaciones a aplicar son
F =maG ;
M =I ; con la
restricción de pura rodadura, = aG =r: La fuerza F tira hacia la derecha y en
principio, el punto C tiende a ir en dicha dirección, pero la fuerza de roce f se
opone al movimiento por deslizamiento. Del esquema vemos que se cumplen
F
f = maG ;
rf = I = I
De ésta última
f =I
aG
r2
aG
I
= aG m + 2
r2
r
;
aG
:
r
por lo que
F = maG + I
Entonces
f=
aG =
F
:
m (1 + I=mr2 )
F
F
I
=
:
r2 m (1 + I=mr2 )
1 + mr2 =I
Una cuestión de suma importancia es que, para que haya rotación pura,
sin deslizamiento, f debe satisfacer
f
s mg;
como en Estática. Aquí entra en juego s porque, para cada t, el punto
C está momentáneamente …jo (en situación estática). Por lo tanto, la fuerza
aplicada debe satisfacer
F
s mg
1 + mr2 =I = Fl{m :
Si no, la rueda rotará y deslizará, cosa que debe evitarse.
CASO 2
al eje que pasa por el centro de la rueda, O; se aplica un momento M a través
de un motor; modela el caso de las ruedas motrices en un automóvil.
M
17
f
Del esquema vemos que M tiende a mover el punto C hacia la izquierda,
por lo tanto, para que C esté instantáneamente …jo, la fuerza de roce f , debe
apuntar hacia la derecha. Ahora las ecuaciones son
f = maG ;
M
rf = M
rmaG =
IaG
;
r
de donde
aG =
M
;
mr (1 + I=mr2 )
Como antes, debe ser f
Ml{m :
s mg
f=
M
:
r (1 + I=mr2 )
y por lo tanto, M
s mgr
1 + I=mr2 =
CASO 3: es la combinación de los dos casos anteriores; modela un auto
encajado que es ayudado por un vehículo de tiro (por ejemplo, un caballo).
Ahora se presenta la disyuntiva de cuál de las dos fuerzas de roce prevalecerá,
si la vinculada con F o con M: Elegimos un sentido arbitrario para f ; luego de
resolver el problema, veremos cuál debe ser. Las ecuaciones a plantear son
M
F
f
F + f = maG ;
aG
;
r
M
rf = I
f=
M=r F I=mr2
;
1 + I=mr2
con las soluciones
aG =
1 F + M=r
;
m 1 + I=mr2
si M=r < F I=mr2 ; entonces f =f i; si no, f = f i: En el caso M=r =
F I=mr2 ; f = 0; por lo que aG = F=m; tendremos una pura traslación (deslizamiento sobre una super…cie helada).
14
Rototraslación sobre planos inclinados
En los casos p
idealizados vistos anteriormente, para los deslizamientos vale a =
g sin y v = 2gh: Ahora consideremos cuerpos como esferas y cilindros (huecos
o macizos), que bajan por un plano inclinado.
18
La variación de energía potencial vale
no desliza
mgh =
=
V = mgh; por lo tanto, si el cuerpo
2
2
mvG
IG ! 2
mvG
1
v2
+
+
= mk 2 G
2
2
2
r2
2
2
mvG
k2
+1
2
r2
de donde
vG =
s
2gh
+1
k2
r2
<
p
2gh
y depende del radio de giro, k; por lo tanto, aún para cuerpos de iguales
masas y radios, es distinto para cada uno de ellos. Ha sucedido que parte de la
energía potencial inicial se ha convertido en energía cinética de rotación.
15
Impulso angular; momento del impulso
Hemos visto en clases anteriores que partiendo de F =dp=dt; obtenemos su
versión integral, el vector impulso
Z
p J = Fdt = (mvG )f (mvG )i ;
cuando los impulsos son impartidos a cuerpos en reposo, entonces debemos
pensar en la ley J =mvG (0) :
Por otro lado, las cantidades análogas para el movimiento rotacional son
L = J como se ve:
Z
Z
L = Mdt = r
Fdt = r J:
Estos vectores tienen su aplicación en los fenómenos impulsivos.
15.1
Ejemplo
Consideremos una esfera de radio r sobre una super…cie rugosa, sobre la cual
actúa un J impulsivo; queremos estudiar los distintos estadios del movimiento
19
de la esfera.
J
G
r
O
Dado que la velocidad inicial es nula, J =
vG (0) =
p =mvG (0) ; por lo cual
J
;
m
por otro lado, por el correspondiente teorema de König
!
L =OP J= L0 = L0 + rG mvG
que podemos poner en la forma
L0 = L0 + rG
J:
Los módulos cumplen (ver …gura)
jL0 j = rJ;
jrG
Jj = rJ
con lo que rJ = IG ! + rJ; de donde se deduce ! = 0: Esto signi…ca que en
un primer momento el cuerpo desliza sin rodar. Esto implica que aparecerá la
in‡uencia de la fuerza de roce f y el coe…ciente dinámico de rozamiento, d :
Esto hace que para t > 0; aparezca una fuerza retardataria
maG =
d mg;
aG =
dg
con lo cual vG (t) sigue una ley decreciente en el tiempo:
vG (t) = vG (0)
d gt
20
=
J
m
d gt:
Ahora bien, con la aparición de la fuerza de roce f , la esfera pasa del puro
deslizamiento a deslizar y rodar, por lo que entran en juego las cantidades !; J; :::
Tomando momentos respecto de G, hay que tener en cuenta que, mientras haya
algo de deslizamiento, NO se cumplirá = aG =r (que vale en la pura rodadura)
d mgr
= IG =
2 2
mr
5
=)
=
5
2
d
g
r
y la velocidad angular crece en el tiempo
! (t) = t =
5
2
d
g
t:
r
¿Para qué valor de t = t se cumplirá vG (t) = ! (t) r? En este caso, habiendo
llegado a esta relación, tendremos movimiento de pura rodadura,
J
m
d gt
=
5
2
d
g
t
r
=) t =
2
7
J
;
d mg
en ese instante
vG (t )
=
=
J
2
dg
m
7
5
vG (0) :
7
J
J
=
mg
m
d
1
2
7
=
5J
7m
A partir de t > t ; el movimiento ya es de rotación pura.
15.1.1
Una variación sobre el mismo tema
En vista del resultado anterior, podemos preguntarnos a qué altura hay que
imprimir el impulso para que el movimiento comience sin deslizamiento, pura
21
rodadura
J
G
O
Como antes, vG (0) = J=m; tomando momentos respecto de G, aplicando
L = r J =IG !;
(h
r) J =
2 2
mr !
5
!!=
5 (h r) J
;
2 mr2
imponiendo la condición J=m = !r
J
5 (h r) J
=
m
2 mr
!h=
7
r:
5
Por la manera como se aplican los vectores (poner …gurita), vemos que la
dirección de L y por lo tanto de ! es entrante al papel; lo que está de acuerdo
con el esquema presentado.
16
Ecuaciones generales del movimiento
Hemos visto en páginas anteriores que, en general, L no es paralelo a !; en el
caso de que sí lo sea, vale la ecuación de uso restringido L =I!: Pero, como
se aprende en Álgebra Lineal, la relación más general entre dos vectores viene
dada por la ecuación matricial
!
L = I !:
22
h
!
donde, con el símbolo I indicamos el tensor de inercia, que puede representarse mediante una matriz3 simétrica de 3 3; que tiene la forma
0
1
I
Ixy
Ixz
! @ xx
Iyx Iyy
Iyz A ;
I =
Izx
Izy
Izz
tal que
0
1
0
1
Lx
!x
!
@ Ly A = I @ ! y A
Lz
!z
y por lo tanto
Lx = Ixx ! x
Ixy ! y
Ixz ! z ;
etc.
Vamos a determinar ahora, (¡esquemáticamente!) la forma de los elementos
Iij para el caso en que ! sea constante. Partimos de las de…niciones
X
L =mi
ri (! ri ) ;
! =! x i+! y j+! z k
ri = xi i+yi j+zi k:
Cuando realizamos el primer producto vectorial (¡hacerlo!)
(!
ri ) = (! y z
! z y) i+ términos similares en j; k:
Introduciendo estas componentes en
mi ri
(!
ri ) = mi wx y 2
! y yx + ! x z 2
! z zx i+ términos similares,
que se pueden arreglar así, sumando y restando adecuadamente (por ejemplo
! x x2 en el primer caso)
mi ri
(!
ri )
= mi wx y 2
! y yx + ! x z 2
= mi ! x x2 + y 2 + z 2
! z zx + ! x x2
! x x2 i + :::
x (! x x + ! y y + ! z z) i + :::
Dado que Lx = Ixx ! x Ixy ! y Ixz ! z ; resulta entonces que
X
X
Ixx =
mi yi2 + zi2
mi ri2 x2i ;
Ixy =
X
mi (xi yi ) ;
etc.
3 Un tensor es un ente geométrico (una generalización del concepto de vector), mientras que
una matriz es una construcción algebraica que no necesita de interpretaciones geométricas.
23
La expresión más general se simpli…ca, cuando los términos no diagonales se
anulan, a la siguiente
L =Ixx ! x i+Iyy ! y j+Izz ! z k;
pero todavía, aún en este caso, L no es paralelo a !; ya que, en general,
Ixx =
6 Iyy 6= Izz :
SOLAMENTE, si el cuerpo gira alrededor de cualquiera de los denominados
ejes principales de inercia, sucederá que L =I!:
16.1
Ejes principales de inercia (E.P.I.)
El principal sentido físico de los ejes principales de inercia es que si un cuerpo
gira alrededor de cualquiera de ellos (o sea, la dirección de ! coincide con la
de un E.P.I.), entonces L =I!: Todo eje de simetría es un eje principal de
inercia pero, aunque no haya simetrías, siempre existe un sistema de ejes que
constituyen los EPIs. Encontrar los EPI es un problema matemático del Álgebra
Lineal, denominado diagonalización de matrices, que se estudia, además, en
Mecánica Racional, asignatura que se verá en 3er. año.
24
16.1.1
Ejemplo
Sea un cubo de arista a y masa m; mostremos la matriz de inercia con respecto
a los ejes x; y; z de sus aristas.
N
O
Puede verse en casi todos los libros de Mecánica Avanzada [1] que, con
respecto a dichos ejes, la matriz de inercia es
1
0
2=3
1=4
1=4
1=4 A ;
I = ma2 @ 1=4 2=3
1=4
1=4 2=3
esto signi…ca que si la dirección de ! es cualquiera de los ejes x; y; z (u
otros), entonces L / !: El proceso de diagonalización lleva a la matriz anterior
a la forma
0
1
2 0
0
2
ma @
0 11 0 A
I=
12
0 0 11
y los ejes principales son: uno, el que va a lo largo de la diagonal ON ; los
otros dos pertenecen a un plano perpendicular a ON y, además, perpendiculares
!
entre sí. Si el cuerpo gira con ! kON o a los otros dos ejes, entonces será L =I!:
Ver las preguntas al …nal del capítulo.
25
17
Cuerpos rígidos vinculados: el giróscopo y el
trompo
El cuerpo rígido puede tener un punto …jo, tal como el CM o algún otro. Si se
cumple que L =I!; entonces, si no hay un momento neto externo, L =cte por
lo que ! =cte; lo que signi…ca que el eje de rotación permace …jo en el tiempo.
Esto es la base de los sistemas de estabilización.
17.1
Giróscopo: el punto …jo es el CM
Si a lo largo del eje de rotación (que suponemos ahora es un eje material ) se
aplica una fuerza, el giróscopo reacciona en forma perpendicular a la dirección
de la fuerza. Sea el esquema de la …gura donde ! =!k; L =Lk
y
x
26
F=
Fx i;
r =zk;
8 M =My j;
y este momento M =dL=dt hace que el giróscopo gire alrededor de un eje
perpendicular a !; con velocidad angular
(es decir ? !). Efectivamente,
recordemos por el teorema de Poisson, que si jLj = cte; entonces
M=
de donde se ve que
la vez
dL
=
dt
L=
I!;
es perpendicular a ambos: M; !: El momento M es a
M =r F
=
L=
I!;
de donde, tomando los módulos
rF = I !
!
=
rF
;
I!
cuanto más rápido gire el giróscopo alrededor de su eje, más lentamente
precesará.
17.2
Trompo (o giróscopo pesado): el punto …jo no es el
CM
Ahora el sistema está …jo en O, en un extremo del cuerpo. En lugar de pensar en
una fuerza externa aplicada ex-profeso sobre el eje, nos ocupamos de la fuerza
peso, en el CM. El análisis es del todo similar al del caso anterior; la única
diferencia es que ahora es M = r mg. Entonces la fórmula …nal del apartado
anterior es
mr
=
g;
I!
donde el signo " " resulta del análisis de la …gura.
18
Cuerpo rígido libre
Mencionaremos, para terminar, dos movimientos más sutiles que sufre nuestro
planeta. Debido a que la Tierra no es completamente esférica, las in‡uencias del
Sol y de la Luna ejercen un par neto, por lo que la precesión del eje de rotación,
que es muy lenta, de unos 27000 años. El movimiento de nutación se debe a que
los pares debidos al Sol y a la Luna varían conforme a la posición relativa de
los mismos respecto de la Tierra; el período es de unos 19 años. También puede
pensarse en lo siguiente: el eje de rotación de la Tierra forma un ángulo de unos
23.5o con respecto al plano de la órbita de la Tierra alrededor del Sol y el par
gravitacional produce esa lenta precesión. Así, en diferentes épocas, diferentes
estrellas pasan a ser la "Estrella Polar". Esta precesión de los equinoccios fue
descubierta por el astrónomo babilónico Cidenas, alrededor del año 343 a.n.e.
(antes de nuestra era)[1]
27
19
Apéndice: el péndulo compuesto
Este sistema, que volverá a tratarse en la próxima unidad, Oscilaciones, permite
relacionar el momento de inercia de cualquier cuerpo, en especial si es de forma
irregular, con el período de oscilación del mismo.
Si el cuerpo oscila respecto del eje z, siendo el ángulo de apartamiento
respecto de la vertical, de la relación Mz = Iz ; se deduce
mgh sin = Iz
d2
;
dt2
de donde, para sin
d2
+
dt2
siendo
d2
+
dt2
mgh
Iz
una frecuencia. El ángulo
=
0
T =
= 0;
satisface, entonces
sin ( t + ) :
El período T vale
2
2
=2
s
Iz
;
mgh
si lo comparamos con el del péndulo ideal
s
l
T =2
g
podemos identi…car al cociente Iz =mh
20
lred ; denominado longitud reducida.
Revisión
Una vez estudiado el capítulo, se debe
i) conocer las de…niciones de velocidad y aceleración angulares (llamadas
!; ; respectivamente),
ii) conocer las ecuaciones fundamentales para el estudio de los cuerpos que
roto-trasladan,
iii) aplicar el principio de conservación de L a diversos problemas (bailarina, bicicleta,...); se recomienda especialmente el estudio de textos donde estas
cuestiones estén tratadas didácticamente,
iv) conocer la condición para que haya rotación sin deslizamiento; saber
aplicarla en la resolución de problemas roto-traslatorios (ruedas...),
v) describir cualitativamente el movimiento de un giróscopo.
vi) interpretar el sentido físico del producto vectorial (! = r F; L = r p);
coordinar esta unidad con la denominada "Movimiento Relativo" y la aplicación
del producto vectorial en las aceleraciones centrípeta y de Coriolis.
vii) reconocer la relación entre los teoremas de König y el teorema de Steiner.
28
21
Cuestiones
1. Tomemos el caso del cubo de arista a; i) qué pasa si el cubo gira alrededor
de los ejes x; y; z; ¿se sentirá que giran "suavemente" o "a los golpes"? ii) qué
pasa si los ejes son los E.P.I?
2. Las dimensiones del momento (que es un vector) son las mismas que
las de trabajo W; que es un escalar; ¿qué signi…cado tiene este hecho? De la
misma manera, las dimensiones de L son las mismas que Energía
tiempo....
3. ¿Cuál es la utilidad práctica del teorema de Steiner?
4. ¿Será seguro para un leñador pararse directamente detrás del árbol en el
lado opuesto de la caída?
5. ¿Por qué es esencial el uso de un giróscopo para el movimiento de las
aeronaves?
References
[1] Marion, Jerry, Classical Dynamics of particles and systems, Ac. Press (1965).
29