2.3.- Rotación y momento de fuerzas.
Anuncio

Curso l Física I
Autor l Lorenzo Iparraguirre
Anexo 9.2:
Equilibrio de momentos, cuplas, y fuerzas paralelas.
Equilibrio, y equilibrio de rotación
En el capítulo de Estática hemos explorado las características de algunos sistemas sencillos de
fuerzas planteando la llamada Primer Condición de Equilibrio ( Fi 0 ). Esta condición
solamente tiene en cuenta las componentes de las fuerzas, y no el lugar en el que se aplican.
Ahora sabemos que la misma fuerza aplicada en distintos lugares en general tiene diferente
momento, y por lo tanto diferente capacidad para influir sobre posibles rotaciones de los cuerpos.
Así, por ejemplo, consideremos el caso, muy frecuente, en que se trata de hacer girar un volante o cuerpo similar aplicándole en puntos diametralmente opuestos dos fuerzas opuestas de
igual módulo (fig. A9.2.1).
Fig. A9.2.1 : Estas fuerzas, siendo vectores opuestos entre sí, cancelan mutuamente sus tendencias a producir traslación del sistema hacia algún lado, pero suman sus efectos rotatorios,
ya que, con respecto al eje, ambas tienden a producir rotación en el mismo sentido.
Este sistema de fuerzas tiene resultante nula, es decir que cumple con la llamada primer con
dición de equilibrio ( Fi 0 ), y sin embargo es claro que no está en equilibrio desde el punto de vista de los momentos aplicados, que pueden impulsar la rotación.
Por otra parte, también podemos imaginar que dada una fuerza aplicada sobre un cuerpo que
tiene un eje de rotación, la rotación puede ser impedida con otra fuerza de diferente módulo y
dirección, si se la aplica con el brazo de palanca adecuado. De manera que dos fuerzas que no
cumplen con la primer condición de equilibrio, sí pueden equilibrar sus momentos, es decir
sus efectos sobre posibles rotaciones.
Todo esto nos dice que para que un sistema de fuerzas está en equilibrio no es suficiente con
que se cumpla la primer condición que ya hemos visto en Estática (resultante nula), sino que
además también debe cumplirse una segunda condición similar, referida a los momentos de
las fuerzas con respecto a algún eje.
Es decir, dado el sistema de fuerzas { Fi }, actuantes sobre un cuerpo, decimos que cumplen
con la “segunda condición de equilibrio”, o “Condición de equilibrio de los momentos”, si,
con respecto al punto (eje) O que se elija, el momento resultante es nulo:
313
Curso l Física I
Autor l Lorenzo Iparraguirre
M F ;O 0
(A9.2.1)
i
Si esta condición se cumple se considera que el sistema de fuerzas tiene potencialidad nula
para influir sobre la posible rotación del cuerpo alrededor del eje considerado.
Condiciones de Equilibrio de un sistema de fuerzas
Decimos que un sistema de fuerzas está en equilibrio si cumple con las dos condiciones de
equilibrio que hemos visto.
1er Condición:
F 0
2da Condición:
M F ;O 0
i
i
Nota: Para resolver situaciones prácticas es importante conocer algunas consecuencias que se
deducen fácilmente de las condiciones y razonamientos presentados hasta aquí. Dos afirmaciones útiles (que por razones de espacio no demostraremos) son las siguientes:
a) Si se cumple la primer condición ( FR = 0), y los momentos están equilibrados con respecto
a algún punto elegido como eje, entonces los momentos están equilibrados con respecto a
cualquier otro punto que se elija.
Esto significa que, en la práctica, cuando se resuelve un problema de equilibrio, planteando la
primer condición, luego hay libertad para elegir el punto que se considere más cómodo como
eje para la segunda condición, ya que cualquier punto será equivalente para esto.
b) Con ciertos criterios sencillos es posible elegir puntos diferentes como eje, tales que si los
momentos están equilibrados con respecto a dos de estos puntos, entonces necesariamente se
cumple la primer condición.
Esto significa en la práctica, que los problemas de equilibrio se pueden resolver planteando la
segunda condición con respecto a dos puntos diferentes, sin necesidad de plantear la primer
condición, que se cumplirá automáticamente.
Ubicación de la equilibrante y de la resultante de un sistema de fuerzas
Cuando un sistema de fuerzas no está en equilibrio se puede definir una fuerza equilibrante de
manera que, incluyéndola en el sistema, lo deja en equilibrio.
Para ello, dado un sistema de fuerzas, lo primero y más sencillo es encontrar las componentes
de la fuerza resultante, efectuando simplemente la suma vectorial:
FR F1 F2 ... FN
Luego, estas mismas componentes, cambiadas de signo, constituyen las de la equilibrante:
FE FR
Ahora bien, la ubicación de FR se define de manera que tenga el brazo de palanca necesario
para que su momento con respecto a cualquier punto sea igual al momento resultante del sistema con respecto a ese mismo punto. Como dada una determinada ubicación de una fuerza,
314
Curso l Física I
Autor l Lorenzo Iparraguirre
su momento no cambia si se la desplaza a lo largo de su misma recta de acción (ya que esto no
cambia el brazo de palanca), entonces lo único que es posible y necesario determinar de la
posición de FR , en realidad es la ubicación de su recta de acción.
Se define la ubicación de la recta de acción de la resultante de un sistema de fuerzas de tal manera que:
El momento de la resultante con respecto a cualquier eje es
igual a la suma de todos los momentos de las fuerzas con respecto
al mismo eje.
Consiguientemente, FE , al ser un vector exactamente opuesto al FR , sólo puede equilibrar el
momento de ésta si tiene el mismo brazo de palanca, es decir la misma recta de acción, que se
define indistintamente para FE y FR .
Fuerzas paralelas
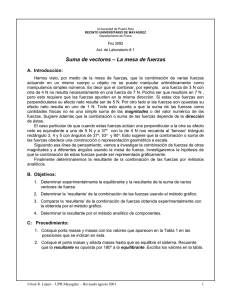
Un caso de mucho interés práctico el de sistemas de fuerzas paralelas. Si, para comenzar la
discusión, consideramos dos fuerzas paralelas del mismo sentido, tendremos una situación
como la de la figura A9.2.2.
A'
A
Fig.A9.2.2: Sobre un cuerpo se aplican dos fuerzas paralelas, en los puntos A y B. La fuerza resultante debe equivaler a ellas en módulo, dirección,
sentido, y momento. Para ello tiene la misma dirección y sentido, un módulo igual a la suma de
los módulos, y se ubica de manera de tener el
mismo momento que las fuerzas aplicadas. Para
calcular los momentos con respecto al punto arbitrario O, se traza la recta OB’C’A’, perpendicular a
las rectas de las fuerzas: los brazos de palanca
son los segmentos OA’, OB’, y OC’.
FA
C'
FR
FB
B B'
O
En esta figura A9.2.2 vemos dos fuerzas paralelas del mismo sentido aplicadas en dos puntos
cualesquiera, A y B, de un cuerpo. En función de lo que hemos dicho, es lo mismo tratar de
encontrar la resultante de estas dos fuerzas, o considerar que este cuerpo está en equilibrio
gracias a la acción de una fuerza equilibrante FE , la cual, para ser encontrada, requiere de las
mismas ideas y procedimiento.
Comencemos buscando la resultante de este sistema: FR FA FB . Al componer FA y FB ,
vectores paralelos, se encuentra que FR será un vector también paralelo a ellos, con el mismo
sentido, y con un módulo igual a la suma de los módulos.
Para ubicar la recta de acción de la resultante debemos pensar que ella debe aplicar el mismo
momento que las fuerzas del sistema respecto de cualquier eje, puesto que se pretende que
equivalga a ellas.
315
Curso l Física I
Autor l Lorenzo Iparraguirre
De manera que, si elegimos cualquier punto O como eje para tomar momentos, considerando
los brazos de palanca OA’, OB’, y OC’ (figura A9.2.2), la recta de acción de la resultante debe
ubicarse de manera que:
FA OA’ + FB OB’ = FR OC’ = (FA + FB) OC’
De donde se deduce que:
OC
FA OA FB OB
FA FB
(A9.2.2)
Esta expresión permite ubicar la recta de acción de la resultante respecto de cualquier punto O
elegido arbitrariamente.
Si ahora se desea aplicar una fuerza que equilibre al sistema, para ello bastará aplicar la fuerza
FE , opuesta a la FR calculada antes, en cualquier punto de esa misma recta. El sistema forma
do por FA , FB , y FE (figura A9.2.3), queda en equilibrio.
A'
A
FA
FE
C'
FB
B B'
O
Fig. A9.2.3: FE equilibra al sistema FA , FB . En estas condiciones, cualquiera de
estas fuerzas es equilibrante del sistema formado por las otras dos.
El punto O con respecto al cual se calculan los momentos es arbitrario. Si se lo elige en un
punto de la recta de alguna de las fuerzas, se anulará el brazo de palanca de esa fuerza, y en la
condición de equilibrio de los momentos sólo intervendrán las otras dos fuerzas. Por ejemplo,
si tomamos momentos con respecto al punto B, el momento de FB será nulo, y la condición
de equilibrio de los momentos quedará:
FA A’B’ - FE C’B’ = 0
[A9.2.3]
Es decir, para tres fuerzas que están en equilibrio, siempre se equilibran los momentos de dos
cualesquiera de ellas con respecto al punto en que se aplica la otra.
Esta última expresión también podría haberse planteado para encontrar la ubicación de la recta
de acción de FE de una manera tal vez más sencilla:
BC
FA AB
FE
316
Curso l Física I
Autor l Lorenzo Iparraguirre
Es interesante advertir que cualquier sistema de tres fuerzas paralelas en equilibrio tendrá
siempre el aspecto mostrado en la figura A9.2.3: dos fuerzas apuntan en un determinado sentido, y la otra, opuesta, que es mayor porque su módulo iguala a la suma de los módulos de
éstas, queda situada entre ellas.
Para ver que siempre será así, revisemos los razonamientos siguientes:
a) Si tenemos dos fuerzas paralelas que apuntan en el mismo sentido, como FA y FB , la equilibrante, de sentido opuesto, con un módulo FE = FA + FB , debe situarse en un punto con res
pecto al cual FA y FB cancelen sus momentos. Para ello este punto debe estar entre ambas, ya
que de lo contrario los momentos tendrán igual signo, y más cerca de la mayor, para que ésta
tenga menos brazo de palanca.
b) Ahora bien, si consideramos dos fuerzas que apuntan en sentidos contrarios, como FA y FE
en la misma figura, entonces la equilibrante es la FB . Para que los momentos de FA y FE
puedan equilibrarse con respecto al punto B en el cual se aplica FB , la recta de acción de ésta
última debe estar fuera del sistema, de modo que los momentos de FA y FE tengan signo con
trario, y del lado de la mayor, FE , para que ésta tenga menos brazo de palanca que la otra.
Además FB debe apuntar en el sentido de la menor, FA , para que se pueda cumplir la primer
condición de equilibrio.
De manera que vemos que se repite la conclusión para los sistemas de tres fuerzas paralelas en
equilibrio (y lo mismo se obtendría partiendo del sistema FB y FE en la misma figura):
En un sistema de tres fuerzas paralelas en equilibrio siempre hay dos
fuerzas que tienen el mismo sentido, y la tercera, opuesta, debe tener
un módulo igual a la suma de los módulos de las otras dos, y estar
ubicada entre ellas, más cerca de la mayor.
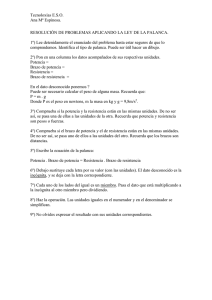
Esto se comprende bien en cualquier caso práctico, como el de la balanza “romana” que presentamos en la figura A9.2.4.
FO
A
O
B
FB
FA
Fig. A9.2.4: esquema de fuerzas que actúan sobre la varilla AOB de una balanza “romana”.
El funcionamiento de esta balanza se basa sobre la idea de regular el brazo de palanca de la
pesa móvil, hasta que el momento aplicado por su peso con respecto al punto de apoyo O,
317
Curso l Física I
Autor l Lorenzo Iparraguirre
equilibre al momento del peso del objeto a pesar. Ahora bien, el punto de apoyo O es el punto
en que actúa la fuerza FO (reacción del apoyo), que es la equilibrante de las otras dos (para
simplificar esta discusión estamos ignorando el peso del platillo, de la varilla, etc.; está claro
que todos deben ser tenidos en cuenta en un tratamiento exacto, pero que no se modifican por
eso las ideas que estamos planteando).
Pero si consideramos con respecto al punto A, FO tiende a hacer girar la varilla en sentido
antihorario alrededor de A, considerado fijo, con un momento que F0 OA, que es equilibrado
por el momento -FB AB, con el que FB tiende a hacerla girar en sentido opuesto.
Y algo similar puede decirse con respecto al punto B: FO tiende a hacer girar la varilla en
sentido horario alrededor de B, considerado fijo, con un momento que -F0 OB, que es equili
brado por el momento FA AB, con el que FA tiende a hacerla girar en sentido antihorario.
Debe quedar claro entonces que cada fuerza es la equilibrante de las otras dos.
Cupla o par de fuerzas
Si tenemos el caso de dos fuerzas paralelas de sentido opuesto, FA y FB , de módulos parecidos (supongamos que FB es levemente mayor que FA), tenemos que la equilibrante debe tener
un módulo muy pequeño (FE = FB - FA, valor pequeño), estar del lado de la mayor ( FB ), a una
distancia EB suficientemente grande como para que su momento con respecto a B equilibre al
de FA.
FB
A
E
B
FE
FA
Fig. A9.2.5: Esquema de tres fuerzas paralelas en equilibrio.
Como se ilustra en la figura A9.2.5, si FE muy chico, entonces BE debe ser muy grande, ya
que para que haya equilibrio de momentos con respecto a B debe cumplirse: FA AB = FE BE .
Si el cuerpo sobre el que FA y FB están aplicadas no es suficientemente extenso como para
abarcar el punto E, no habrá forma de equilibrar al sistema con una única fuerza FE .
Como caso límite tenemos que si FA y FB tienden a hacerse iguales en módulo, entonces FE
tiende a cero, mientras que el punto en el que habría que aplicarla se aleja infinitamente. Se
llega así a un sistema muy particular de dos fuerzas de igual intensidad y sentido opuesto, actuando en rectas paralelas, denominado “cupla”, o “par de fuerzas”. Este sistema puede ser
equilibrado por otra cupla (opuesta), pero no por una fuerza equilibrante única.
La cupla constituye un sistema de fuerzas muy interesante, porque tiene un momento cuyo
valor no depende de la distancia al eje. En efecto, consideremos dos fuerzas paralelas cualesquiera como las mostradas en el siguiente esquema. Las dos rectas de acción de las fuerzas
318
Curso l Física I
Autor l Lorenzo Iparraguirre
definen el plano de la rotación, y el punto O indica la ubicación arbitraria de un eje perpendicular a ese plano.
O
A'
B'
FB
A
OB’= brazo de palanca de FB
OA’= brazo de palanca de F A
FA
B
Dado que FA = FB = F, resulta que la fuerza resultante (y por lo tanto la equilibrante) es nula:
FA + FB = 0
Pero el momento total con respecto a O vale:
F×OB’ F×OA’= F× (OB’ OA’) = F× A’B’
Vemos que el momento resultante de una cupla depende de la distancia entre las rectas de
acción de las fuerzas, pero no de la ubicación del eje o centro de momentos.
En función de esto definimos que la distancia entre las rectas, A’B’, es el brazo de palanca de
la cupla, y podemos enunciar:
Momento (resultante) de una cupla
El momento de una cupla, es igual al producto del módulo de una de las fuerzas
por la distancia entre las rectas, a la cual llamamos brazo de palanca de la cupla.
Los siguientes esquemas ilustran varias posibilidades para el momento mayor o menor de una
cupla, en función de la ubicación relativa de las fuerzas.
A
A
A
b = AB
B
A
b = AB
B
b=0
b < AB
B
Momento máximo
positivo.
Momento máximo
negativo
Momento intermedio,
positivo
B
Momento nulo
Explicación de momentos en términos de cuplas.
Al tener fuerza resultante nula, y tener un momento cuyo valor no depende de la distancia al
eje, la cupla puede ser considerada, en cierta forma, como un “momento puro”. Es más, como
veremos a continuación, siempre que existe una fuerza aplicando un momento con respecto a
un punto, puede interpretarse que hay una cupla responsable de ese momento.
En efecto, consideremos la fuerza FA aplicada en un punto A cualquiera de un cuerpo. El
punto O indica un eje perpendicular al plano del dibujo, con respecto al cual vamos a conside319
Curso l Física I
Autor l Lorenzo Iparraguirre
rar los momentos. Este eje puede ser una idealización matemática, sin existencia real - eso no
es relevante en esta discusión. El momento de FA con respecto al eje vale FA× b, siendo b la
distancia desde la recta de acción de FA hasta el eje.
FA
O
b A
Ahora bien, si suponemos que en O hay aplicadas dos fuerzas, una FO igual a la FA , y una
opuesta, FO , no ha cambiado nada, de manera que tener FA , es lo mismo que tener el con
junto { FA , FO , y FO }.
FO
FA
O
-FO
b A
Ahora bien, FA , y FO forman una cupla cuyo momento con respecto a O es FA× b , exacta
mente el mismo que el de la FA sola. De manera que todo el conjunto puede ser pensado co
mo la fuerza FO (que es la FA pero aplicada en O), más una cupla de momento igual a FA× b ,
que en realidad puede estar aplicada en cualquier lugar (ya que su momento es el mismo con
respecto a cualquier punto).
Es decir, este razonamiento nos enseña cómo se puede trasladar paralelamente una fuerza desde un punto A a otro punto B:
La acción de una fuerza aplicada en un punto A, equivale a la de la misma fuerza
aplicada en B, más una cupla cuyo momento debe ser el de la fuerza aplicada en
A, con respecto a B.
FA
FA
B
b A
Equivale a
FA
B
-FA
b
Ejemplo desarrollado.
Considere un bolo que se arroja en las condiciones del ejemplo desarrollado al final del Capítulo 9,
cuyo enunciado decía:
En un juego de bolos se arroja un bolo de 16 cm de diámetro y 2 kg de masa con una velocidad de 10
m/s. El bolo es arrojado horizontalmente, sin girar sobre sí mismo, y rasante con el piso (de manera
320
Curso l Física I
Autor l Lorenzo Iparraguirre
que toma contacto inmediatamente con él, sin golpear). Así que inicialmente el movimiento es de traslación pura, y en el punto de contacto, donde el bolo desliza, actúa una fuerza de rozamiento de 2 N.
Explique cómo se facilita la explicación del movimiento aplicando la idea de trasladar las fuerzas exteriores al centro del bolo, especialmente en la parte del movimiento en que hay rodadura con deslizamiento parcial respecto del piso.
Desarrollo
Al resolver este problema en aquella ocasión dijimos que, desde que el bolo toma contacto con la pista
se considera la acción de una fuerza de rozamiento constante, de 2 N hacia atrás, que a su vez es la
fuerza resultante, y se calcula cómo es el movimiento del centro del bolo, sin importar dónde está aplicada dicha fuerza. De esta idea resultó que este movimiento es un MRUV, con aceleración a = 2N /
2kg = 1 m/s2, en sentido contrario al movimiento.
Por otra parte, para la rotación se considera el momento de la fuerza de rozamiento con respecto al
centro, que vale 2 N 0,08 m = 0,16 N·m, y actúa en el sentido de hacer rotar el bolo en sentido horario (rodar hacia delante).
Ahora simplemente agregamos una idea que hace más claro el panorama: decimos que la fuerza de
rozamiento, actuando sobre el punto inferior del bolo (en el contacto con el piso) puede suponerse
actuando en el centro, a condición de agregar una cupla de 0,16 N·m, actuando en sentido horario.
De este modo se entiende claramente que el movimiento del centro de masa se puede calcular por la
acción de la fuerza resultante, ya que ella se puede considerar actuando exactamente en ese punto. Y
por otra parte, la rotación se entiende como resultado de la acción de una cupla neta sobre el sistema,
actuando para acelerar la rotación hacia delante
Situación real
CM
Equivale a
F
v
Fr
v
F
Fr
fuerza resultante
sobre el bolo
Fuerza en el CM para
estudiar cómo se
frena la traslación
321
Cupla para estudiar
cómo se acelera la
rotación