¿Qué es un Autómata Programable?
Anuncio

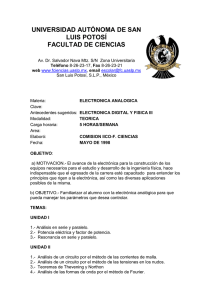
UASLP UASLP ARQUITECTURA ARQUITECTURA INTERNA INTERNA DEL DEL AUTÓMATA AUTÓMATA PROGRAMABLE PROGRAMABLE O O PLC PLC Facultad de Ciencias Carlos Canto UASLP UASLP ¿Qué es un Autómata Programable? Un autómata programable industrial (API) o Programable logic controller (PLC), es un equipo electrónico, programable en lenguaje no informático, diseñado para controlar en tiempo real y en ambiente de tipo industrial, procesos secuenciales. Un PLC trabaja en base a la información recibida por los sensores y el programa lógico interno, actuando sobre los accionadores de la instalación. Facultad de Ciencias Carlos Canto UASLP UASLP ¿Dónde se usa un Autómata Programable? Un autómata programable suele emplearse en procesos industriales que tengan una o varias de las siguientes necesidades: 9Espacio reducido. 9Procesos de producción periódicamente cambiantes. 9Procesos secuenciales. 9Maquinaria de procesos variables. 9Instalaciones de procesos complejos y amplios. 9Chequeo de programación centralizada de las partes del proceso. 9Aplicaciones generales: 9Maniobra de máquinas. 9Maniobra de instalaciones. 9Señalización y control. Facultad de Ciencias Carlos Canto UASLP UASLP Ventajas e inconvenientes de los PLC's Entre la ventajas tenemos: Menor tiempo de elaboración de proyectos. Posibilidad de añadir modificaciones sin costo añadido en otros componentes. Mínimo espacio de ocupación. Menor costo de mano de obra. Mantenimiento económico. Posibilidad de gobernar varias máquinas con el mismo PLC. Menor tiempo de puesta en funcionamiento. Si el PLC queda pequeño para el proceso industrial puede seguir siendo de utilidad en otras máquinas o sistemas de producción. Y entre los inconvenientes: ¾Adiestramiento de técnicos. ¾Costo. Facultad de Ciencias Carlos Canto UASLP UASLP PARTES DE UN AUT ÓMATA PROGRAMABLE AUTÓMATA Fuente de alimentación CPU Módulo de entrada Módulo de salida Terminal de programación Periféricos. Facultad de Ciencias Carlos Canto UASLP UASLP PARTES DE UN AUT ÓMATA PROGRAMABLE AUTÓMATA Facultad de Ciencias Carlos Canto UASLP UASLP PARTES DE UN AUT ÓMATA PROGRAMABLE AUTÓMATA Facultad de Ciencias Carlos Canto UASLP UASLP TERMINALES DE PROGRAMACI ÓN PROGRAMACIÓN Programador profesional tipo PC Facultad de Ciencias Programador de mano Carlos Canto UASLP UASLP Autómatas Autómatas programables programables Tipos de PLC´s De acuerdo al número de Entradas y Salidas De gama baja: ¾ con E/S<256 De gama media: ¾ con 256<=E/S <=1024 De gama alta: ¾ con E/S>1024 Facultad de Ciencias Carlos Canto Tipos de PLC´s UASLP UASLP De acuerdo a su conformación Compactos: ¾ tienen todas sus componentes electrónicas en un solo compartimiento Modulares: ¾ Las E/S son módulos o tarjetas independientes con varias E/S ,que se acoplan al bus con conectores . Facultad de Ciencias Carlos Canto UASLP UASLP Ejemplo de PLC’s Compactos Facultad de Ciencias Carlos Canto UASLP UASLP Algunos PLC’s Modulares Ejemplo de tarjeta o módulo de e/S FESTO SIEMENS Facultad de Ciencias Carlos Canto Autómatas Autómatasprogramables programables UASLP Componentes de un PLC Microprocesador Microprocesador Módulos Módulos de de entrada entrada Imagen Imagen de de entradas entradas Imagen Imagen de de salidas salidas Módulos Módulos de de salida salida El microprocesador no actúa en forma directa con las entradas y salidas del PLC. Para ello se usa la imagen de entradas y la imagen de salidas Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables UASLP Componentes de un PLC Fuente Fuente de de alimentación alimentación Batería Batería Memoria Memoria de de programa programa Bus Businterno interno Interfases Interfases de de entrada entrada Memoria Memoria De De datos datos temporizadores temporizadores Unidad Unidad central central Memoria Memoria imagen imagen de deE/S E/S Interfases Interfases De De salida salida contadores contadores Diagrama de bloques de la arquitectura de un PLC Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables EL CPU UASLP La unidad central de procesamiento es un sistema microprocesador que es la unidad de toma de decisiones en el PLC. También contiene el sistema de memoria. El CPU monitorea las entradas toma decisiones basadas en las instrucciones sostenidas en su memoria de programa, realiza conmutación, conteo, temporización comparación de datos y operaciones secuenciales. Facultad de Ciencias Carlos Canto Q. EL CPU UASLP UASLP La CPU es el corazón del autómata programable. Es la encargada de ejecutar el programa de usuario mediante el programa del sistema (es decir, el programa de usuario es interpretado por el programa del sistema). Sus funciones son: Vigilar que el tiempo de ejecución del programa de usuario no excede un determinado tiempo máximo (tiempo de ciclo máximo). A esta función se le suele denominar Watchdog (perro guardián). Ejecutar el programa de usuario. Crear una imagen de las entradas, ya que el programa de usuario no debe acceder directamente a dichas entradas. Renovar el estado de las salidas en función de la imagen de las mismas obtenida al final del ciclo de ejecución del programa de usuario. Chequeo del sistema. Facultad de Ciencias Carlos Canto Autómatas Autómatasprogramables programables UASLP Memorias de un PLC Programas Programasejecutivos ejecutivos Firmware, Firmware,del delsistema sistema ROM ROM EPROM EPROM Memorias Memoriastemporales temporales RAM RAMoo EPROM EPROM Memoria MemoriaImagen Imagenootabla tabla de estados de estadosde de entrada-salida entrada-salida(RAM) (RAM) Memoria Memoriade dedatos datos Numéricos y Numéricos yvariables variables Internas Internas(RAM) (RAM) Memoria Memoriadel delprogramas programas de usuario de usuario(RAM) (RAM) Programa y memoria del sistema o firmware Memoria de la tabla de datos Memoria de usuario Memoria del programa del usuario Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables UASLP Memorias de un PLC Programas Programasejecutivos ejecutivos Firmware, Firmware,del delsistema sistema ROM ROM EPROM EPROM Memorias Memoriastemporales temporales RAM RAMoo EPROM EPROM Programa y memoria del sistema o firmware Memoria ROM , no accesible desde el exterior, en la que el fabricante graba el programa monitor, sistema ejecutivo o firmware para realizar las siguientes tareas: Inicializa el PLC al energizar o restablecer (reset), inicia el ciclo de exploración de programa. Realiza autotest en la conexión y durante la ejecución del programa Comunicación con periféricos y unidad de programación Lectura y escritura en las interfases de E/S. Contiene el interprete del programa del usuario, si existe. Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables UASLP Memorias de un PLC La memoria de imagen de entradas y salidas: Almacena las últimas señales tanto las leidas en la entrada como las enviadas a la salida actualizándose tras cada ejecución completa del programa Las señales de entrada consideradas para el cálculo no son las actuales de la planta , sino las presentes en la memoria imagen leidos en el ciclo anterior. Y los resultados obtenidos no van directamente a la interfaz de salida sino a la memoria imagen de salidas cuando finaliza cada ejecución del programa. Facultad de Ciencias Autómatas Autómatasprogramables programables Carlos Canto Q. UASLP Memoria imagen de entradas y salidas Las imágenes de entradas y salidas del proceso existen por tres razones: El sistema verifica todas las entradas al comenzar el ciclo. De este modo se sincronizan y ”congelan” los valores de estas entradas durante la ejecución del programa. La imagen del proceso actualiza las salidas cuando termina de ejecutarse el programa. Ello tiene un efecto estabilizador en el sistema. El programa de usuario puede acceder a la imagen del proceso mucho más rápido de lo que podría acceder directamente a las entradas y salidas físicas, con lo cual se acelera su tiempo de ejecución. Las entradas y salidas son unidades de bit a las que se debe acceder en formato de bit. No obstante, la imagen del proceso permite acceder a ellas en formato de bits, bytes, palabras y palabras dobles, lo que ofrece flexibilidad adicional. Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables UASLP Acceso a la memoria imagen de Entrada y Salida Memoria Memoriade de programa programa CPU CPU Imagen Imagende de entradas entradas Interfaz Interfazde de entradas entradas Memoria Memoria de de datos datos Imagen Imagende de salida salida Interfaz Interfazde de salidas salidas a) consulta de entradas y carga en memoria imagen Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables UASLP Acceso a la memoria imagen de Entrada y Salida a) consulta de entradas y carga en memoria imagen Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables UASLP Acceso a la memoria imagen de Entrada y Salida Memoria Memoriade de programa programa CPU CPU Imagen Imagende de entradas entradas Interfaz Interfazde de entradas entradas Memoria Memoria de de datos datos Imagen Imagende de salida salida Interfaz Interfazde de salidas salidas b) Ejecución del programa cargando resultados en memoria imagen de salida Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables UASLP Acceso a la memoria imagen de Entrada y Salida Memoria Memoriade de programa programa CPU CPU Imagen Imagende de entradas entradas Interfaz Interfazde de entradas entradas Memoria Memoria de de datos datos Imagen Imagende de salida salida Interfaz Interfazde de salidas salidas c) Transferencia de resultados a interfaz de salida Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables UASLP Interfases de entrada y salida • Establecen la comunicación entre la unidad central y el proceso. • Filtran • Adaptan • Codifican Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables UASLP Clasificación de las entrada y salida POR EL TIPO DE SEÑALES: Digitales de 1 bit Digitales de varios bits Analógicas POR LA TENSIÓN DE ALIMENTACIÓN: Facultad de Ciencias De corriente continua ( estáticas de 24/110 Vcc) De CD a colector abierto (PNP o NPN) De CA (60/110/220 Vca) Salidas por relevador ( libres de tensión) Carlos Canto Q. Interfaces de entrada y salida misión : establecer un puente de comunicación entre el autómata y el proceso Las interfaces de entrada filtran, adaptan y codifican de forma comprensible para la CPU, las señales procedentes de los elementos de entrada. Las interfaces de salida son las encargadas de decodificar, y amplificar las señales generadas durante la ejecución del programa antes de enviarlas a los elementos de salida. Interfaces de entrada y salida En los autómatas pequeños, el tipo de interfaces disponibles suele ser limitado, siendo las más frecuentes, clasificadas por entradas y salidas: – Entradas Corriente continua a 24 ó 48 Vcc. Corriente alterna a 110 o 220 Vca. Analógicas de 0-10 Vcc o 4-20 mA – Salidas Por relé. Estáticas por triac a 220 Vca máximo. Colector abierto para 24 o 48 Vcc. Analógicas de 0-10 V o 4-20 mA. Autómatas Autómatasprogramables programables UASLP Clasificación de las entrada y salida POR EL AISLAMIENTO: Con separación Galvánica (optoacopladores) Con acoplamiento directo POR LA FORMA DE COMUNICACIÓN CON LA UNIDAD CENTRAL: Comunicación serie Comunicación paralelo POR LA UBICACIÓN: Locales remotos Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables UASLP Ciclo de operación del PLC (SCAN) Facultad de Ciencias Carlos Canto Q. Autómatas Autómatasprogramables programables UASLP Ciclo de operación del PLC (SCAN) arranque Leer Leerstatus status de delas las entradas entradas Ejecutar Ejecutarprograma programa de decontrol control yyaccionar/ accionar/apagar apagar bobinas bobinasinternas internas Actualizar Actualizarsalidas salidas Ejecución del programa Facultad de Ciencias Carlos Canto Q.