Curso de Procesamiento Digital de Imágenes
Anuncio

Curso de
Procesamiento Digital de Imágenes
Impartido por: Elena Martínez
Departamento de Ciencias de la Computación
IIMAS, UNAM, cubículo 408
http://turing.iimas.unam.mx/~elena/Teaching/PDI-Mast.html
elena.martinez@iimas.unam.mx
Programa del Curso
1.
2.
3.
4.
Introducción.
Fundamentos de la imagen digital.
Realce de la imagen en el dominio espacial.
Realce de la imagen en el dominio de la
frecuencia.
5. Restauración de la imagen.
6. Representación del color.
7. Compresión de imágenes.
3. Relace de la imagen en el
dominio espacial
a) Antecedentes.
b) Algunas transformaciones básicas de niveles
de gris.
c) Procesamiento del histograma.
d) Realce de la imagen utilizando operaciones
artméticas/lógicas.
e) Filtros espaciales básicos.
f) Filtros espaciales de suavizamiento (smooth).
g) Filtros espaciales de realce (sharp).
Uso de la estadística del
histograma para realce
En lugar de utilizar al histograma directamente para el
realce, podemos hacer uso de algunos parámetros
estadísticos obtenidos directamente del histograma.
Sea r una variable aleratoria discreta que representa los
niveles de gris en el rango [0, L-1], y sea p(ri) el componente
i correspondiente al i-ésimo valor de r del histograma
normalizado. El n-ésimo momento de r alrededor de la media
está definido como:
L 1
donde m es el valor medio de r
n
n (r ) (ri m) p (ri )
(su valor promedio de gris).
i 0
Uso de la estadística del
histograma para realce
La media m está definida como:
L 1
m ri p (ri )
i 0
De las dos expresiones anteriores se tiene que 0=1 y
1=0. El segundo momento se define como:
L 1
2 (ri m) 2 p (ri )
i 0
Esta expresión es la varianza de r, que se denota como 2(r).
La desviación estándar es la raíz cuadrada de la varianza.
Uso de la estadística del
histograma para realce
En términos de realce, estamos interesados principalmente en
la media, que es una medida del promedio del nivel de gris en una
imagen, y en la varianza (o desviación estándar) que es una
medida promedio del contraste.
Consideraremos dos usos de la media y la varainza para el
realce: la media y varianza globales que se miden sobre la imagen
entera y se usan para un ajuste grueso de toda la intensidad y el
contraste. Un uso más poderoso de estas dos herramientas es para
el realce local, donde se utilizan como la base para hacer cambios
que dependen de características de una region predeterminada de
cada pixel de la imagen.
Uso de la estadística del
histograma para realce
Sea (x,y) las coordenadas de un pixel en una imagen, y sea
Sxy una vecindad (subimagen) de tamaño específico centrada
en (x,y). La media y la varianza de la region Sxy están dadas
por:
mS xy rs ,t p(rs ,t )
( s ,t )S xy
S2
xy
2
[
r
m
]
s,t S xy p(rs,t )
( s ,t )S xy
donde rs,t es el nivel de gris en las coordenadas (s,t) de la
vecindad, y p(rs,t) es el componente del histograma
normalizado de la vecindad correspondiente al nivel de gris.
Uso de la estadística del
histograma para realce
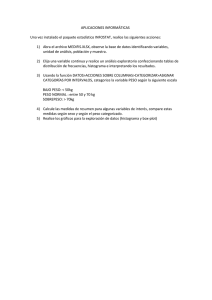
Imagen de microscopía electrónica (SEM) de un filamento
de tungsteno enrollado alrededor de un soporte. Observe en
el lado derecho de la imagen como existe otro pedazo de
filamento más oscuro.
Uso de la estadística del
histograma para realce
El método de realce es como sigue: Sea f(x,y) el valor de
un pixel de una imagen en cualquier coordenada (x,y), y sea
g(x,y) el valor del pixel realzado correspondiente en esa
misma coordenada. Entonces:
E f ( x, y ) si mS xy k0 M G y k1 DG S xy k 2 DG
g ( x, y )
de otra manera
f ( x, y )
donde E, k0, k1, k2 son constantes positivas; k1 < k2 ; MG es la
media global de la imagen de entrada y DG es la desviación
estándar global.
Uso de la estadística del
histograma para realce
Hacer una selección adecuada de los parámetros E, k0, k1, k2
requiere de un poco de experimentación para ganar familiaridad
con la imagen dada. En este caso los valores se seleccionaron:
E=4.0, k0=0.4, k1=0.02, k2=0.4 .
E se eligió bajo de manera que al ser multiplicado por los
niveles a ser realzados (oscuros) el resultado siguiera
relativamente oscuro y así preservar el balance visual general. k0
se eligió como a la mitad de la media global ya que es obvio al
observar la imagen que las áreas que requieren realce
definitivamente están por debajo de la media global. Un análisis
similar fue hecho para k1 y k2. Finalmente la vecindad se eligió
pequeña para preservar el detalle, de 3x3 pixeles.
Uso de la estadística del
histograma para realce
(a) Imagen formada por las medias locales.
(b) Imagen formada por las desviaciones estandar locales.
(c) Imagen formada por todas las multiplicaciones de constantes
utilizadas en el realce (valores 1=oscuro y E=claro).
Uso de la estadística del
histograma para realce
Imagen resultado
del realce. Se
pueden observar
algunos artefactos
entre el borde del
filamento y el
fondo producidos
por esta técnica.
3. Relace de la imagen en el
dominio espacial
a) Antecedentes.
b) Algunas transformaciones básicas de niveles
de gris.
c) Procesamiento del histograma.
d) Realce de la imagen utilizando operaciones
artméticas/lógicas.
e) Filtros espaciales básicos.
f) Filtros espaciales de suavizamiento (smooth).
g) Filtros espaciales de realce (sharp).
Realce utilizando operaciones
aritméticas/lógicas
Las operaciones aritméticas/lógicas entre imágenes se
realizan pixel a pixel (a excepción de la operación lógica
NOT que se realiza en una sóla imagen).
Sólo tenemos que preocuparnos de implementar las
operaciones lógicas AND, OR y NOT porque éstas son
operadores funcionalmente completos, es decir, que cualquier
otra operación lógica puede implementarse utilizando
cualquiera de estas tres operaciones básicas.
Realce utilizando operaciones
aritméticas/lógicas
Por ejemplo, realizar una operación NOT en un pixel
negro de 8-bits (una cadena de 8 ceros) produce un pixel
blanco (una cadena de 8 unos). Los valores intermedios se
procesan de la misma manera cambiando 1´s por 0´s y
viceversa. Es equivalente a una transformación negativa.
Las operacionas AND y OR se utilizan para hacer
“máscaras” y extraer así regiones de interés (RIO). Las
operaciones lógicas también se utilizan con frecuencia en
conjunto con las operaciones morfológicas (morfología
matemática).
Realce utilizando operaciones
aritméticas/lógicas
Realce utilizando operaciones
aritméticas/lógicas
De las cuatro operaciones aritméticas, la substracción y la
adición (en ese orden) son las más utilizadas para el realce
de la imagen.
Se considera la división de dos imágenes como la
multiplicación de una imagen por el recíproco de la otra. La
multiplicación de una imagen por una constante se utiliza
para incrementar su nivel de gris promedio, pero además, la
multiplicación se puede utilizar para el realce de imágenes
como una operación de máscara, similar que las anteriores
pero en imágenes de niveles de gris en lugar de binarias.
Substracción de imágenes
La diferencia entre dos imágenes f(x,y) y h(x,y) se expresa
de la forma:
g ( x, y ) f ( x, y ) h ( x, y )
Se obtiene calculando la diferencia entre pares de pixeles
correspondientes de f y h . La clave de la substracción es
resaltar la diferencia entre imágenes.
Substracción de imágenes
A. Imagen original
del fractal.
B. Resultado de
poner los 4 bits
menos
significativos en 0.
C. La diferencia
entre A-B. Casi
ceros.
D. La imagen C
ecualizada.
Substracción de imágenes
Otro ejemplo se tiene en el área médica con las llamadas
radiografías en modo máscara. Se obtiene una imagen de
rayos X de la región de interés de un paciente la cual se
captura con una cámara de televisión (en lugar de una
película fotográfica), a esta imagen, h(x,y) , se le llama
máscara. Se le inyecta al sujeto un medio de contraste en el
torrente sanguíneo, y se toman imágenes (f(x,y)) en la misma
region anatómica que h(x,y) y se substrae esta máscara de la
serie de imágenes tomadas después de inyectar el contraste.
El efecto neto es el realce de detalles.
Substracción de imágenes
Tomadas desde la parte de arriba de la cabeza del sujeto, el
punto brillante en la parte inferior de la imagen de la
izquierda corresponde a la parte alta de la cuerda espinal.
Substracción de imágenes
Algunas notas de implementación: la mayoría de las imágenes
con las que trabajamos se despliegan utilizando 8 bits, por lo que
esperamos tener valores en el rango de 0 a 255. Los valores
obtenidos de la diferencia de imágenes pueden variar de –255 a
255, por lo cual tenemos que reescalar estos valores para que
puedan ser desplegados. Existen dos posibles formas: 1) a cada
pixel de la imagen resultado se le suma 255 y se divide entre 2,
esto no garantiza que se cubrirá todo el rango dinámico posible.
2) Un método más preciso, se busca el valor mínimo de la
diferencia y su valor negativo se suma a todos los pixeles
resultado de la diferencia, luego todos los pixeles se rescalan al
intervalo [0,255] multiplicando cada pixel por 255/Max donde
Max= al valor máximo de la diferencia modificada.
Promedio de imágenes
Considere una imagen ruidosa g(x,y) formada por la suma
de ruido (x,y) a una imagen f(x,y), esto es:
g ( x, y ) f ( x, y ) ( x, y )
donde asumimos que para cada par de coordenadas (x,y) el
ruido está decorrelacionado y tiene un valor promedio igual a
cero. (Recuerde que la varianza de una variable aleatoria x con media m se define como
E[(x-m)2], donde E[•] es la esperanza del argumento. La covarianza de dos variables aleatorias
xi y xj se define como E[(xi-m)(xj-m)]. Si las variables están decorelacionadas, su covarianza es
El objetivo es reducir el contenido del ruido sumando un
conjunto de imágenes ruidosas {gi(x,y)}.
0).
Promedio de imágenes
El promedio de M imágenes ruidosas se define entonces
como:
M
1
g ( x, y )
M
g ( x, y )
i 1
i
Mientras M se incrementa la variabilidad (ruido) del valor de
un piexel en una posición (x,y) decrementa. Esto significa
que g ( x, y ) se aproxima más a f(x,y) si el número de
imágenes ruidosas incrementa. En la práctica las imágenes
gi(x,y) deben estar alineadas para evitar la introducción de
emborronamiento u otros artefactos en la imagen de salida.
Promedio de imágenes
Una aplicación muy importante del promedio de imágenes
es en el área de astronomía, donde la toma de imágenes con
niveles de luz bajo es rutinario, causando que el ruido del
sensor despliegue imágenes que son virtualmente inútiles
para su análisis.
La siguiente figura muestra una imagen de la galaxia par
llamada NGC 3314, tomada por el Telescopio Espacial
Hubble de la NASA.
Promedio de imágenes
A. Imagen de la galaxia NGC 3314.
B. Imagen A corrupta con ruido
Gaussiano decorrelacionado con
media 0 y desviación estándar de
64 niveles de gris. Se puede
apreciar que es inutilizable!
C-F. Imágenes promediadas con 8,
16, 64 y 128 imágenes, resp. Se
puede apreciar que cuando M=128
la imagen resultado es muy cercana
en apariencia a la imagen en A.
Promedio de imágenes
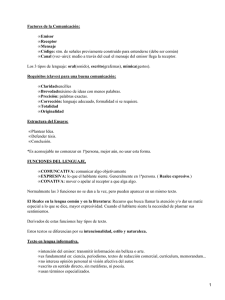
A. Primera columna muestra las
diferencias de la imagen A-C,
A-D, A-E y A-F, resp (fig. ante.)
B. La segunda columna muestra
el respectivo histograma de las
diferencias.
Nota. La media y la desviación
estándar de los histogramas
decrece conforme M se
incrementa. Podemos ver también
el efecto del decremento de la
media de las imágenes ya que se
vuelven más oscuras conforme M
se incrementa.
3. Relace de la imagen en el
dominio espacial
a) Antecedentes.
b) Algunas transformaciones básicas de niveles
de gris.
c) Procesamiento del histograma.
d) Realce de la imagen utilizando operaciones
artméticas/lógicas.
e) Filtros espaciales básicos.
f) Filtros espaciales de suavizamiento (smooth).
g) Filtros espaciales de realce (sharp).
Filtros espaciales básicos
Como hemos mencionado anteriomente algunas
operaciones de vecindad operan con los valores de los
pixeles de la imagen de la vecindad y los correspondientes
valores de una subimagen, la cual tiene las mismas
dimensiones que la vecindad.
A las subimágenes se les llama filtro, máscara, kernel,
template o ventana, donde los tres primeros nombres son los
más comunes. Los valores en una subimagen filtro se
refieren como coeficientes, en lugar de pixeles.
Filtros espaciales básicos
El concepto de filtrado tiene sus raices en el uso de la
transformada de Fourier para el procesamiento de señales,
también llamado dominio de la frecuencia, que veremos en
el siguiente capítulo. En esta sección discutiremos
operaciones de filtrado que se realizan directamente en los
pixeles de la imagen. Se utiliza el término filtro espacial para
referirnos a este tipo de procesos.
Filtros espaciales básicos
Los filtros pasa-bajos eliminan o atenúan los componentes de
altas frecuencias en el dominio de la frecuencia (detalles
marcados o finos de la imagen), y resultan en imágenes borrosas.
Los filtros pasa-altos eliminan o atenúan los componentes de
bajas frecuencias, resultando en el realce de los bordes y otros
detalles marcados o finos.
Los filtros pasa-banda remueven una fracción de frecuencias
seleccionada entre frecuencias bajas y altas (se utiliza
normalmente para restauración de imágenes, no para realce).
Filtros espaciales básicos
El proceso de filtrado espacial consiste en mover el filtro
punto a punto sobre la imagen. En cada punto (x,y), la
respuesta del filtro en ese punto se calcula utilizando una
relación predefinida.
Para filtrado espacial lineal, la respuesta está dada por la
suma de los productos de los coeficientes del filtro y los
correspondientes pixeles de la imagen en el área que abarca
la vecindad.
Filtros espaciales básicos
Para una máscara de tamaño 3 x 3, el resultado (respuesta),
R, del filtro lineal con el filtro en el punto (x,y) de la imagen
es:
R = w(-1,-1) f(x-1,y-1) + w(-1,0) f(x-1,y) + ...
+ w(0,0) f(x,y) + ... + w(1,0) f(x+1,y) + w(1,1) f(x+1,y+1)
que es la suma de los productos de los coeficientes del filtro
con los pixeles correspondientes de la imagen que están
directamente bajo la máscara (correspondientes posiciones
x,y).
Filtros espaciales básicos
Note que el
coeficiente w(0,0)
coincide con el valor
f(x,y), indicando que la
máscara está centrada
en (x,y) cuando se
lleva a cabo la
sumatoria de los
productos.
Filtros espaciales básicos
Para una máscara de tamaño m x n , asumimos que m=2a+1 y
n=2b+1, donde a y b son enteros no negativos. Esto es para
asegurarnos que la máscara tendrá tamaño impar.
En general, el filtrado lineal de una imagen f de tamaño M x N
con un filtro de tamaño m x n está dado por:
g ( x, y )
a
b
w(s, t ) f ( x s, y t )
s at b
donde a=(m-1)/2 y b=(n-1)/2. Para generar una imagen filtrada
completa, la ecuación debe aplicarse para x= 0, 1, 2, ..., M-1 y
y= 0, 1, 2, ..., N-1.
Filtros espaciales básicos
El proceso de filtrado espacial definido anteriormente, cuya
definicion es similar en el dominio de la frecuencia, es un
concepto que se conoce como convolución. Por esta razón el
filtrado espacial se refiere como “convolucionar una imagen
con una máscara”. De manera simlar algunas máscaras se
llaman “máscara de convolución” o “kernel de
convolución”.
Filtros espaciales básicos
El filtrado espacial no lineal también opera en una
vecindad de manera similar a la descrita anteriormente, pero
no utiliza explícitamente coeficientes a manera de suma de
productos. Por ejemplo, la reducción de ruido se puede
conseguir utilizando un filtro no lineal cuya función básica
sea calcular la mediana de los niveles de gris en la vecindad
en donde el filtro está posicionado. El cálculo de la mediana
es una operación no lineal, así como el cálculo de la varianza
como los ejemplos mostrados en secciones anteriores.
Filtros espaciales básicos
Una cosideración importante al implementar operaciones de
vencindades es el hecho de ¿qué hace cuando el centro del filtro se
aproxima al borde de la imagen?
Existen varias soluciones al respecto:
* Limitar la ejecución del filtro a que su centro esté a una distancia de
(n-1)/2 del borde. El resultado será una imagen más pequeña que la
original.
* Ejecutar el filtro con todos los pixeles sólo con las secciones de la
máscara que caigan dentro de la imagen. El resultado será una imagen
del mismo tamaño pero el resultado tendrá pixeles procesados con sólo
una parte de la máscara.
* Añadir las columnas y renglones necesarios con ceros para cubrir el
tamaño total de la imagen con el filtro (padding). El resultado tendrá el
problema que el anterior de tener resultados de filtro utilizando ceros.
Instituto de Investigaciones en
Matemáticas Aplicadas y en Sistemas
(IIMAS)
http://turing.iimas.unam.mx/~elena/Teaching/PDI-Mast.html