Respuesta transitoria de circuitos RLC
Anuncio

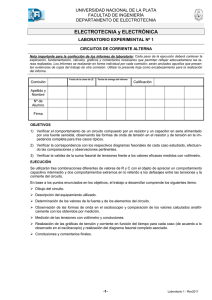
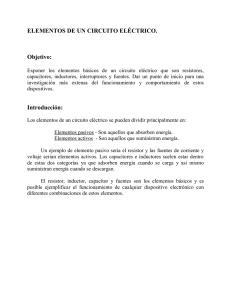
Laboratorio de Análisis de Circuitos Práctica 8 Respuesta transitoria de circuitos RLC 1 Objetivos 1 Verificar experimentalmente el valor de resistencia que se necesita para que un circuito RLC en serie sea críticamente amortiguado, y además corroborar el rango de valores que aquél puede tener para que el sistema tenga una respuesta subamortiguada o sobreamortiguada. 2 3 s 2 + 2 ξ ωn s + ω2n = 0 y cuyas raíces son los valores característicos: s1, 2 = −ξ ω n ± ω n ξ2 −1 . Dependiendo del valor de ξ, dichos valores pueden ser reales, imaginarios o complejos, dando los siguientes comportamientos en la respuesta del sistema: Para otra configuración diferente de circuito RLC verificar la relación que existe entre el valor de la resistencia del circuito y el tipo de respuesta que tiene el sistema eléctrico. si ξ = 0, entonces s1, 2 = ± j ω n (valores imaginarios), y el sistema será no amortiguado (caso teórico ideal); Corroborar con Proteus ISIS la respuesta de cada uno de los circuitos probados en esta práctica. si 0 < ξ < 1, entonces s1, 2 = − ξ ωn ± j ωn 1 − ξ 2 (valores complejos conjugados), y el sistema será subamortiguado; 2 Introducción si ξ = 1, entonces s1, 2 = −ξ ωn (valores reales negativos iguales), y el sistema será críticamente amortiguado; El modelo matemático de un sistema de segundo orden es una ecuación diferencial que puede escribirse como finalmente, si ξ > 1, entonces s1, 2 = −ξ ωn ± ω n ξ 2 − 1 (valores reales negativos diferentes), y el sistema será sobreamortiguado. 2 d x(t) dx(t) + 2 ξ ωn + ω 2n x ( t ) = ω2n f ( t ) 2 dt dt en la cual al parámetro ξ se le denomina coeficiente de amortiguamiento, y al ωn se le conoce como frecuencia angular natural de oscilación. La función f ( t ) es la entrada o función de excitación del sistema y x ( t ) es la salida o respuesta del mismo. Es importante el análisis cualitativo de los diferentes tipos de sistemas de segundo orden, de manera de poder reconocerlos a partir de la gráfica de su respuesta. Para el caso particular de los sistemas de segundo orden subamortiguados, presentan varios parámetros de interés en su respuesta, La ecuación característica que corresponde al modelo matemático anterior es: 1 como lo son la frecuencia de oscilación y su inverso el periodo de oscilación, el sobrepaso, el tiempo de sobrepaso, el tiempo de levantamiento y el tiempo de asentamiento. 1 Frecuencia de oscilación, f, es el número de oscilaciones que tiene la respuesta del sistema por unidad de tiempo: f= ω 2π donde ω = ωn 2 Periodo de oscilación, T, es el tiempo que transcurre en una oscilación completa de la respuesta del sistema: T= 3 ⎞ ⎟. 2 ⎟ 1− ξ ⎠ ξπ Dado que las cantidades ξ y ωn quedan en función de los valores de los dispositivos que conforman al circuito, es posible calcular los valores de estos últimos si se establece que la respuesta del sistema es críticamente amortiguada, o bien se conocen otros parámetros de diseño, como el periodo para el caso de la respuesta subamortiguada. Tiempo de sobrepaso, tp, es el tiempo necesario para que la respuesta alcance su valor máximo: π ωn 1 − ξ2 . Tiempo de levantamiento, tl, es el tiempo necesario para que la respuesta alcance su valor final por primera vez: tl = 6 En el diseño de circuitos se presenta con frecuencia el problema de la obtención de los valores de los dispositivos eléctricos, en este caso del resistor, del inductor y del condensador, de tal forma que, dada la configuración del sistema, se obtenga una salida determinada. Sobrepaso, Sp, es el valor máximo de la respuesta, considerando la respuesta permanente unitaria (vf = 1): tp = 5 Figura 1 Parámetros de la respuesta de un sistema subamortiguado. 1 . f ⎛ Sp = exp ⎜ − ⎜ ⎝ 4 1 − ξ2 . π−φ ωn 1 − ξ 3 a) Medición de la resistencia interna del generador de funciones , donde φ = áng cos ξ . 2 Ajuste con ayuda de un osciloscopio la salida de un generador de funciones, de manera que se obtenga una señal cuadrada con 5 V de valor pico (en caso de que no sea posible, ajústelo al valor entero mayor que pueda obtener del equipo). Dado que el osciloscopio tiene una resistencia interna muy grande del orden de 1 MΩ, el voltaje medido corresponderá al de la fuente ideal, pues la caída de potencial en la resistencia interna es prácticamente nula. Tiempo de asentamiento, ta, es el tiempo que transcurre para que la respuesta oscile entre el 95% y el 105% de su valor permanente: ta = Desarrollo 3 . ξω n En la Figura 1 se ilustran los parámetros mencionados en los párrafos anteriores. 2 d) Armado del circuito del experimento 1 Conecte un resistor a la salida del generador de funciones, y vuelva a medir con el osciloscopio el voltaje pico en las terminales del generador. Arme el circuito mostrado en la Figura 2 con un resistor con un valor de resistencia de R = 68 Ω. Note que las resistencias rg y rL son las resistencias internas del generador de funciones y del inductor, respectivamente. Aplique una señal cuadrada con una amplitud de 5 V pico y una frecuencia de 200 Hz. La diferencia de los valores corresponderá a la caída de potencial en la resistencia interna, y dado que se establece un circuito divisor de voltaje, será posible determinar el valor de la resistencia interna de dicho generador de funciones. Observe en el osciloscopio la señal de salida del circuito, vC, y verifique el tipo de sistema al que corresponda (subamortiguado, sobreamortiguado, críticamente amortiguado). b) Medición de la resistencia interna del inductor Conecte en serie un inductor y un multímetro, ajustado de manera que pueda emplearse como amperímetro. Aplique al conjunto anterior la salida de una fuente de voltaje de 5 V, corroborando su valor con ayuda del osciloscopio. Entonces, la resistencia interna del inductor se podrá obtener con la división del valor de dicho voltaje entre la lectura de la corriente obtenida con el multímetro. c) Medición de la inductancia Conecte al inductor las terminales del generador de funciones, con una señal cuadrada de 5 V pico y con una frecuencia de 200 Hz. Figura 2 Circuito RLC en serie. Posteriormente cambie el resistor por uno que tenga una resistencia de R = 820 Ω, y de igual manera verifique el tipo de sistema al que corresponde su respuesta. Verifique con el osciloscopio la señal de voltaje de dicho inductor, y determine el tiempo en que se obtiene una variación del 63.2% de la diferencia del valor final y el valor inicial. Dicho valor es la constante de tiempo del circuito RL, la cual debe ser igual a: Finalmente realice la misma operación, pero para un resistor con una resistencia de R = 1.8 kΩ. Para el circuito cuya respuesta corresponda a un sistema subamortiguado, mida el periodo, T, del transitorio, el sobrepaso, Sp, el tiempo de sobrepaso, tp, el tiempo de levantamiento, tl, y el tiempo de asentamiento, ta. L τ= . R Dado que se conoce R, el cual es la suma de las resistencias internas del generador de funciones y del inductor, es posible determinar el valor de la inductancia L. Para los circuitos cuya respuesta corresponda a sistemas críticamente amortiguado o sobreamortiguado, mida los tiempos en que el voltaje de salida, vo, alcanza el 50% y el 90% del valor de estado permanente. 3 c) Dibuje la señal que obtuvo en el osciloscopio para el cálculo de la inductancia, acotando los valores máximo y mínimo del voltaje en el inductor, así como el tiempo y su respectivo valor de voltaje en el punto en que se midió el 63.2% de la diferencia de los valores final e inicial. e) Armado del circuito del experimento 2 Arme el circuito mostrado en la Figura 3 con un resistor con un valor de resistencia de R = 68 Ω. Nuevamente aplique una señal cuadrada con una amplitud de 5 V pico y una frecuencia de 200 Hz. Obtenga el valor de la inductancia medida con base en el procedimiento anterior. Observe en el osciloscopio la señal de salida del circuito, vC, y establezca a qué el tipo de sistema corresponde el sistema eléctrico analizado (subamortiguado, sobreamortiguado o críticamente amortiguado. d) Obtenga la ecuación diferencial que modela al sistema eléctrico de la Figura 2, y determine los valores teóricos de R para los cuales el circuito tiene las respuestas: Cambie el resistor por un con resistencia de R = 180 Ω, posteriormente por otro con resistencia de R = 1 kΩ, y de manera similar al experimento 1, determine a qué tipo de sistema eléctrico corresponde cada uno de los casos observados. 1 subamortiguada, con ξ = 0.2; 2 críticamente amortiguada; 3 sobreamortiguada, con ξ = 2. Incluya la memoria de cálculo de estos valores de resistencia R. e) Para el caso de circuito con respuesta subamortiguada, obtenga los valores teóricos del periodo, T, del transitorio, el sobrepaso, Sp, el tiempo de sobrepaso, tp, el tiempo de levantamiento, tl, y el tiempo de asentamiento, ta, y compárelos con los valores medidos experimentalmente. Haga los comentarios que considere pertinentes. f) Para los casos en que el circuito se comporte como un sistema críticamente amortiguado o sobreamortiguado, determine los tiempos para los cuales la salida alcanza tanto el 50% como el 90% de la respuesta permanente, y compárelos con los medidos en el osciloscopio. Haga los comentarios que sean importantes. Figura 3 Circuito RLC en derivación. 4 g) Obtenga con Proteus ISIS las respuestas de los tres circuitos del experimento 1, conectando una fuente de voltaje VPULSE con un valor inicial de 0, valor de pulso de 5, tiempo de retraso de 0, tiempos de levantamiento y de caída de 1 us (µs), un ancho de pulso de 2.5 ms y un periodo de 5 ms, e imprima las gráficas de los voltajes de salida vC, para cada uno de los casos. Acote en la gráfica correspondiente los parámetros obtenidos en los incisos e) y f). Realice la comparación de Informe a) Anote los valores obtenidos para la medición de la resistencia interna del generador de funciones, y escriba el proceso que siguió para determinar dicha resistencia. b) De manera similar, registre los valores que midió para la determinación de la resistencia interna del inductor, y obtenga su valor. 4 los valores obtenidos con los teóricos, y haga los comentarios que crea que son de interés. 6 h) Demuestre que la ecuación diferencial que modela al sistema eléctrico de la Figura 3 es: _____________________________________ d 2 v C rg rL C + R rL C + L d v C + d t2 (R + rg ) L C dt _____________________________________ rg + rL + R _____________________________________ + (R + rg ) L C vC = _____________________________________ rL v f (R + rg ) L C _____________________________________ i) A partir de la comparación de la ecuación diferencial mostrada en la Introducción, y esta última expresión, obtenga los valores de ω n y ξ , para cada valor de resistencia empleado en el segundo experimento. Incluya la memoria de cálculo. _____________________________________ _____________________________________ _____________________________________ _____________________________________ _____________________________________ j) Escriba el tipo de sistema al que correspondió cada uno de los casos del circuito del experimento 2 observados durante la práctica, relacionándolo con el valor de la resistencia R empleado. 7 k) Verifique que las señales del voltaje de salida vC se relacionan con el tipo de sistema al que corresponde el circuito, con base en su valor particular de coeficiente de amortiguamiento ξ . Bibliografía Dorf, Svoboda, Circuitos eléctricos, Quinta edición, Alfaomega, México, 2003. Desoer, Kuh, Basic Circuit Theory, McGrawHill, EUA, 1969. Ogata, Dinámica de Sistemas, Prentice Hall Hispanoamericana, México, 1987. l) Con el empleo de Proteus ISIS, obtenga las gráficas del voltaje vC para las configuraciones críticamente amortiguada y subamortiguada, conectando una fuente de voltaje VPULSE similar al del punto g). 5 Conclusiones, sugerencias y comentarios Facultad de Ingeniería, UNAM Laboratorio de Análisis de Circuitos, DIMEI octubre de 2008 Equipo y material empleado Un osciloscopio un generador de funciones una fuente de poder un multímetro resistores de 68, 180, 820, 1000 y 1800 Ω un inductor (50 mH aprox.) un condensador de 0.22 µF una tableta de experimentación (protoboard). 5