CAPÍTULO 3 DIFERENCIACI ´ON EN VARIEDADES
Anuncio

CAPÍTULO 3
DIFERENCIACIÓN EN VARIEDADES
1.
INTERROGANTES CENTRALES DEL CAPÍTULO
Se pretende que el alumno sepa definir, establecer o determinar lo siguiente:
• Derivación sobre C ∞ (p).
• Covectores tangentes.
• Vector tangente a una variedad.
• El espacio cotangente.
• Vectores asociados a las funciones coordenadas.
• Diferencial de una aplicación diferenciable.
• El espacio tangente.
• Teorema de la función inversa.
• Las curvas coordenadas.
• El fibrado tangente.
• Ecuaciones del cambio de base.
• El fibrado cotangente.
• Rango de una aplicación diferenciable.
2. CONTENIDOS FUNDAMENTALES DEL CAPÍTULO
Uno de los puntos cruciales para generalizar el Cálculo Diferencial de Rn a una variedad diferenciable es la definición que demos de vector tangente y de derivada direccional de una función
diferenciable. Por este motivo es conveniente recordar estos conceptos en Rn y volverlos a interpretar.
Un vector v en un punto p del espacio euclı́deo Rn se define como el vector tangente en p a
una curva diferenciable que pasa por p, curva que en Análisis se suele tomar como la recta p + tv.
Sin embargo, el vector v puede pensarse como un operador en el conjunto C ∞ (p) de las funciones
diferenciables en un entorno de p, que asigna a cada función f el número real v(f ) = Dv f (p), que
no es más que la derivada direccional de la función f según la dirección determinada por v. Es fácil
ver que esta aplicación es R -lineal y satisface la regla de Leibnitz. Por todo ello decimos que v es una
derivación sobre C ∞ (p). Esta interpretación de los vectores tangentes tiene un carácter intrı́nseco, por
lo que su generalización a variedades no tiene problemas.
48
VARIEDADES DIFERENCIABLES Y TOPOLOG ÍA
2.1. El espacio tangente
Sea M una variedad diferenciable. Una curva en M es una aplicación diferenciable α : I → M
de un intervalo abierto I ⊂ R en M . Sin pérdida de generalidad podemos suponer que 0 ∈ I. Dado un
punto p ∈ M y una curva α en M , se dice que α pasa por p si existe un valor t0 ∈ R tal que α(t0 ) = p.
Si una curva α pasa por un punto p siempre podemos reparametrizar la curva para que α(0) = p.
Definición 3.1
Sea α una curva en M que pasa por p, α(0) = p. El vector tangente a α en p es la aplicación α0 (0) :
C ∞ (p) → R definida por
d 0
α (0)(f ) = (f ◦ α).
dt
t=0
Haciendo un razonamiento totalmente análogo al que se realiza en
0
α (0) es una derivación sobre C ∞ (p).
Rn , se puede demostrar que
Definición 3.2
Un vector tangente a M en p es un vector tangente a una curva α en el punto p. El conjunto de todos los
vectores tangentes a M en p se denomina el espacio tangente a M en p y se denota por Tp M .
Antes de poner algún ejemplo de vector tangente vamos a introducir un concepto importante en el
cálculo diferencial en variedades.
Definición 3.3
Sea p ∈ M y consideremos (U, x) una carta local alrededor del punto p con funciones coordenadas
(x1 , x2 , . . . , xn ). Dada una función f ∈ C ∞ (p), la derivada parcial de f con respecto a xi en el punto
p es
∂f
∂(f ◦ x−1 )
(p) =
(x(p))
∂xi
∂ui
donde (u1 , . . . , un ) son las coordenadas naturales de Rn .
Sea (U, x) una carta local y consideremos un punto p ∈ U . Entonces podemos construir la
aplicación
∂ : C ∞ (p) → R
∂xi p
definida por
∂ ∂f
(f ) =
(p)
∂xi p
∂xi
Es fácil demostrar que dicha aplicación es una derivación sobre C ∞ (p). A continuación vamos probar
que también es un vector tangente a M en p. Para ello debemos construir una curva αi que pase por el
punto p y lo tenga por vector tangente.
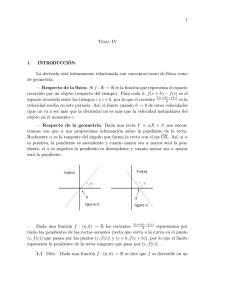
Sea {e1 , . . . , en } la base canónica de Rn y consideremos la curva en M definida por αi (t) =
x−1 (x(p) + tei ), denominada la i-ésima curva coordenada de x en el punto p. Supongamos que las
representantes locales de αi y f están dadas por
βi (t) = (x ◦ αi )(t) = (u1 (t), . . . , un (t))
49
DIFERENCIACI ÓN EN VARIEDADES
y
F (u1 , . . . , un ) = (f ◦ x−1 )(u1 , . . . , un )
Entonces se tiene
αi0 (0)(f ) =
=
t=0
(F ◦ βi )(t) = t=0
F (u1 (t), . . . , un (t)) =
n
X
duj
∂F
(βi (0))
(0
∂uj
dt
j=1
∂ (f )
∂xi p
lo que demuestra nuestra afirmación anterior.
Figura 3.1: Curvas coordenadas y campos básicos
Proposición 3.4
El conjunto de todas las derivaciones sobre C ∞ (p) tiene estructura
de
Si (U, x) es una
espacio vectorial.
∂ ∂ ∂ carta local cuyo dominio contiene al punto p, entonces { ∂x1 , ∂x2 , . . . , ∂xn } constituye una base.
p
p
p
Puede demostrarse sin mucha dificultad que si f ∈ C ∞ (p) entonces la función f se escribe en un
entorno de p como
n
X
f = f (p) +
(xi − xi (p))hi ,
i=1
para ciertas funciones h1 , . . . , hn ∈ C ∞ (p). Como consecuencia de este resultado se obtiene que toda
derivación sobre C ∞ (p) es, de hecho, un vector tangente a M en p. Esto conduce al siguiente teorema.
Teorema 3.5
Sea p ∈ M n . El espacio tangente Tp M es un espacio vectorial (real) de dimensión n.
Hemos probado que cada sistema de coordenadas o carta local que contenga al punto p en su
dominio nos proporciona una base canónica de Tp M , por lo que es natural plantearse cómo estarán
relacionadas dos bases asociadas a sistemas de coordenadas distintos. La respuesta a esta cuestión es
muy sugerente:
Proposición 3.6
La matriz del cambio de base es la matriz jacobiana del cambio de cartas.
50
VARIEDADES DIFERENCIABLES Y TOPOLOG ÍA
2.2. El espacio cotangente
Definición 3.7
Un covector tangente a una variedad M en un punto pes una forma lineal sobre Tp M . El conjunto
de tales covectores constituye el espacio vectorial dual del espacio tangente y se denomina espacio
cotangente a M en p, denotándose, como es habitual, por (Tp M )∗ .
Dada una función diferenciable f ∈ C ∞ (M ), se define la diferencial de f en un punto p como el
covector dfp dado por
dfp (v) = v(f )
para todo vector v ∈ Tp M . Vamos a obtener ahora una base distinguida de Tp∗ M . Sea (U, x) un sistema
de coordenadas con funciones coordenadas asociadas (x1 , . . . , xn ) y sea p ∈ U . Entonces el conjunto
{dx1p , . . . , dxnp } constituye una base de Tp∗ M . Es fácil ver que todo covector ω ∈ Tp∗ M se expresa de
forma única como
n
X
ω=
ω(∂i |p )dxip
i=1
donde ∂i |p denota el i-ésimo campo coordenado asociado a la carta x. En particular, para toda función
diferenciable f y todo punto p se satisface lo siguiente
dfp =
n
X
∂f
dxip
∂xi
i=1
2.3. La diferencial de una aplicación
Una vez introducido el espacio euclı́deo adecuado para poder generalizar el cálculo diferencial
real, se hace preciso indicar cómo se deriva/diferencia una aplicación diferenciable. La diferencial
de una aplicación diferenciable entre espacios euclı́deos es una aplicación lineal, la más próxima de
todas las lineales, cuya matriz asociada es la matriz jacobiana de la aplicación. En la presente sección
pretendemos extender estas ideas a variedades diferenciables.
En primer lugar se observa que toda aplicación diferenciable f entre variedades M y N determina,
de manera natural, una aplicación lineal entre los espacios tangentes Tp M y Tf (p) N , para cada punto p
que se considere en el dominio de f . En efecto, dado un vector tangente v ∈ Tp M podemos considerar
la aplicación w ∈ C ∞ (f (p)) definida por w(g) = v(f ◦ g). Es fácil ver que w es un vector tangente a
N en f (p). Llegamos ası́ a la siguiente definición.
Definición 3.8
Sea f : M → N una aplicación diferenciable. La diferencial de f en p se define como la aplicación
dfp : Tp M → Tf (p) N dada por dfp (v)(g) = v(f ◦ g).
Esta aplicación, también denotada por f∗p , es R -lineal. ¿Cómo se puede interpretar el vector
dfp (v)? Si suponemos que v = α0 (0), siendo α una curva en M que pasa por p en el instante t = 0,
entonces de la propia definición se deduce fácilmente que dfp (v) = β 0 (0), donde β es la curva en N que
pasa por f (p) definida por β = f ◦ α.
51
DIFERENCIACI ÓN EN VARIEDADES
El paso siguiente es encontrar la matriz de la aplicación diferencial dfp , una vez que hemos fijado
las bases en los espacios tangentes de partida y de llegada. Como consecuencia del teorema de la base
es fácil probar que si se escogen las bases canónicas asociadas a dos sistemas de coordenadas, uno para
el punto p y otro para el punto imagen f (p), la matriz de la diferencial de f no es más que la matriz
jacobiana de su representante local.
Proposición 3.9 (Regla de la Cadena)
Sean f : M → N y g : N → P dos aplicaciones diferenciables y sea p un punto del dominio de g ◦ f .
Entonces
d(g ◦ f )p = dgf (p) ◦ dfp
Definimos a continuación el concepto de rango de una aplicación diferenciable f .
Definición 3.10
Sea f : M → N una aplicación diferenciable, y consideremos un punto p ∈ M . El rango de f en p es
la dimensión del subespacio vectorial imagen de la aplicación dfp .
Introducimos un método práctico para su cómputo, ya que dicho rango coincide con el rango de
la matriz jacobiana.
Como una aplicación inmediata de la regla de la cadena se deduce que si f es un difeomorfismo
entre dos variedades, entonces la diferencial de f en todo punto es un isomorfismo lineal. El siguiente
resultado nos dice que, localmente, se verifica también el recı́proco.
Proposición 3.11 (Teorema de la Función Inversa)
Sea f : M → N una aplicación diferenciable y sea p un punto de su dominio. La aplicación diferencial
dfp es un isomorfismo lineal si, y sólo si, existe un entorno U de p tal que f |U : U → f (U ) es un
difeomorfismo.
El teorema anterior justifica que introduzcamos la siguiente definicion. Un difeomorfismo local es
una aplicación diferenciable f tal que para todo punto p ∈ M existe un entorno U de p tal que f |U es un
difeomorfismo. Consecuentemente, f es un difeomorfismo local si, y sólo si, la aplicación diferencial
de f en cualquier punto de M es un isomorfismo lineal, es decir, tiene rango máximo.
Ejemplo 3.12
Un difeomorfismo local no es necesariamente un difeomorfismo global. Consideremos la aplicación f :
R2 → R2 definida por f (x, y) = (ex cos y, ex sen y). Es fácil ver que f es una aplicación diferenciable
cuya matriz jacobiana viene dada por
ex cos y −ex sen y
ex sen y
ex cos y
!
Por tanto f es un difeomorfismo local. Sin embargo, f no puede ser un difeomorfismo global porque no
es biyectiva.
52
VARIEDADES DIFERENCIABLES Y TOPOLOG ÍA
2.4. Los fibrados tangente y cotangente
Para finalizar esta lección probamos que la unión T M de todos los espacios tangentes a una variedad diferenciable, en todos sus puntos, admite una estructura de variedad diferenciable de dimensión
el doble de la dimensión de la variedad M y se denomina el fibrado tangente de M . Asimismo introducimos el fibrado cotangente de M , que también posee una estructura diferenciable de la misma
dimensión.
Sea el conjunto T M definido por
T M = ∪ Tp M
p∈M
Es fácil comprobar que podemos identificar T M con el siguiente conjunto:
T M = {(p, v) : p ∈ M, v ∈ Tp M }
Podemos construir una aplicación proyección de manera natural entre T M y M de la siguiente forma:
π : T M → M , π(p, v) = p. Veamos que el conjunto T M admite estructura de variedad diferenciable
de dimensión 2n, siendo n la dimensión de M .
Sea {(Vi , ϕi )}i un atlas de M y consideremos los siguientes subconjuntos de T M :
Wi = {(p, v) ∈ T M : p ∈ Vi }
y las siguientes aplicaciones:
ψi : Wi → R2n ,
ψi (p, v) = (ϕi (p), dϕip (v))
donde dϕip (v) = (v(x1 ), . . . , v(xn )), siendo (x1 , . . . , xn ) las funciones coordenadas de la carta ϕi . Es
fácil probar que {(Wi , ψi )}i constituye un atlas 2n-dimensional sobre T M , con el cual recibe el nombre
de fibrado tangente de M .
De manera análoga podemos construir el fibrado cotangente de M . Sea el conjunto T ∗ M definido
por
T ∗ M = ∪ Tp∗ M
p∈M
que podemos identificar con el siguiente conjunto:
T ∗ M = {(p, ω) : p ∈ M, ω ∈ Tp∗ M }
Podemos definir una aplicación proyección de manera natural entre T ∗ M y M de la siguiente forma:
π ∗ : T ∗ M → M , π ∗ (p, ω) = p.
Consideremos los siguientes subconjuntos de T ∗ M :
Wi∗ = {(p, ω) ∈ T ∗ M : p ∈ Vi }
y las siguientes aplicaciones:
ψi∗ : Wi∗ → R2n ,
ψi∗ (p, ω) = (ϕi (p), ω(∂1 |p ), . . . , ω(∂n |p ))
siendo (x1 , . . . , xn ) las funciones coordenadas de la carta ϕi . Es fácil probar que {(Wi∗ , ψi∗ )}i constituye un atlas 2n-dimensional sobre T ∗ M .
Si f : M → N es una aplicación diferenciable, entonces podemos construir una aplicación entre
los fibrados tangentes de la siguiente manera: df : T M → T N dada por df (p, v) = (f (p), dfp (v)). La
aplicación df , también denotada por f∗ , se denomina la aplicación diferencial de f .
53
DIFERENCIACI ÓN EN VARIEDADES
3.
ACTIVIDADES DE APLICACIÓN DE LOS CONOCIMIENTOS
A.3.1.
(a) Sea (U, x), con x = (x1 , . . . , xn ), una carta en una variedad diferenciable M . Prueba que
∂xi
∂xj (p) = δij , donde δij representa la delta de Kronecker, para todo punto p ∈ U .
(b) Sea x es una carta de M y f : M −→ R una función diferenciable cuya representante local
F = f ◦x−1 está dada por F (u1 , . . . , un ) = sen u1 + cos u2 . Prueba que
∂f
= cos x1
∂x1
A.3.2.
y
∂f
= − sen x2 .
∂x2
(a) Sea V un espacio vectorial n-dimensional real dotado con su estructura estándar de variedad diferenciable y p ∈ V un punto de V . Prueba que Tp V es canónicamente isomorfo a V .
De este modo, V y Tp V son, como variedades diferenciables, difeomorfas.
(b) Sea ϕ : V −→ W una aplicación lineal entre dos espacios vectoriales de dimensiones n y
m, respectivamente. Prueba que ϕ es una aplicación diferenciable y calcula su diferencial
en un punto p ∈ V arbitrario.
A.3.3.
(a) Si i es la aplicación identidad en algún entorno de m ∈ M , prueba que dim es la aplicación
identidad sobre el espacio tangente Tm M .
(b) Si ϕ : M −→ M 0 es una aplicación constante en algún entorno de m, prueba que dϕm es la
función cero.
(c) Deduce que si φ y ϕ son dos aplicaciones de M en M 0 que coinciden en algún entorno de
un punto m ∈ M , entonces dφm = dϕm .
(d) Sea M una variedad diferenciable conexa y f : M −→ R una función diferenciable tal que
dfp = 0 en todo punto p de M . Prueba que f es una función constante.
A.3.4. Sea C ∞ (m) el álgebra de las funciones diferenciables en un entorno de m. Definimos el subconjunto C ∞ s (m) de C ∞ (m) del siguiente modo. Una función f : M −→ R está en Fs (m) si, y sólo
si, en algún entorno de m
X
fα gα ,
f =c+
finita
donde c ∈ R es una constante y las funciones fα , gα ∈ C ∞ (m) verifican fα (m) = gα (m) = 0.
Prueba que un operador lineal D : F(m) −→ R es una derivación si, y sólo si, D ≡ 0 sobre
C ∞ s (m).
A.3.5. Sea x una carta de M tal que x(m) = a ∈ Rn . Prueba que para toda función f ∈ C ∞ (m) existen
funciones h1 , h2 , . . . , hn ∈ C ∞ (m) y un entorno U de m tal que
f (q) = f (m) +
n
X
(xi (q) − ai )hi (q)
i=1
para todo punto q ∈ U .
A.3.6. Sean M1 y M2 dos variedades diferenciables y consideremos M = M1 × M2 la variedad diferenciable producto. Prueba que para cualquier punto (p, q) de M , la aplicación F : T(p,q) M −→
Tp M1 × Tq M2 dada por
F (v) = ((dπ1 )p (v), (dπ2 )q (v))
es un isomorfismo de espacios vectoriales cuyo inverso viene dado por
F −1 (v1 , v2 ) = (diq )p (v1 ) + (djp )q (v2 ).
54
VARIEDADES DIFERENCIABLES Y TOPOLOG ÍA
En vista de esto, es usual identificar los vectores de T(p,q) M con sus imágenes por F . Ası́ v =
(v1 , v2 ) significará que F (v) = (v1 , v2 ).
A.3.7. Sean f : M −→ M 0 y g : M 0 −→ M 00 dos aplicaciones diferenciables y p un punto que está en
el dominio de g ◦f . Prueba:
(a) Si el rango de g en f (p) es igual a la dimensión de M 0 , entonces g ◦f y f tienen el mismo
rango en p.
(b) Si el rango de f en p es igual a la dimensión de M 0 , entonces el rango de g ◦f en p coincide
con el rango de g en f (p).
A.3.8.
(a) Sea f : M −→ N una aplicación diferenciable con rango constante e igual a dimM =
dimN . Prueba que f (M ) es un abierto en N .
(b) Sea f : M −→ N una aplicación diferenciable y biyectiva. Supongamos que f tiene rango
constante e igual a dimM =dimN . Prueba que f es un difeomorfismo.
(c) Demuestra que la proyección natural π : Sn −→ P n (R ) tiene rango constante e igual a n.
Deduce que π es un difeomorfismo local pero no un difeomorfismo global.
A.3.9.
(a) Sea j : S2 −→ R3 la inyección canónica de la esfera S2 en el espacio euclı́deo tridimensional. Calcula explı́citamente la diferencial de la aplicación j y determina su rango.
(b) Idénticas cuestiones para la inyección canónica j : Sn −→ Rn+1 .
A.3.10. Consideremos Ma el conjunto formado por todas las matrices reales de orden 2 × 2 con determinante a, siendo a un número real no nulo.
(a) Prueba que Ma admite una estructura de variedad diferenciable. ¿Cuál es su dimensión?
(b) Calcula el espacio tangente a Ma en el punto
p=
a 0
0 1
!
.
A.3.11. Sea α : I → R una curva regular en R3 y sea M el conjunto de todos los vectores normales a
α. ¿Admite M estructura de variedad diferenciable? En caso afirmativo, ¿de qué dimensión?
A.3.12. Sea f : R3 −→ R la función diferenciable definida en coordenadas esféricas por f (r, θ, φ) =
r tan θ. Encuentra las constantes a, b, c tales que la diferencial de f se expresa en el punto p =
(r, θ, φ) = (1, π/4, 0) como
dfp = adx + bdy + cdz.
A.3.13. Sea M una variedad diferenciable compacta de dimensión n y consideremos f : M −→
una aplicación diferenciable. ¿Existe algún punto p ∈ M tal que dfp es singular?
Rn
4. BIBLIOGRAFÍA DEL CAPÍTULO
W. BOOTHBY. An Introduction to Differentiable Manifolds and Riemannian Geometry. Academic
Press, 1986.
55
DIFERENCIACI ÓN EN VARIEDADES
R. BRICKELL y R. CLARK . Differentiable Manifolds. Van Nostrand, 1970.
L. CONLON. Differentiable Manifolds. A First Course. Birkhäuser, 1993.
W.D. CURTIS y F.R. MILLER. Differential Manifolds and Theoretical Physics. Academic Press, 1985.
5. PREGUNTAS DE EVALUACIÓN
E.3.1. (Fórmula de Leibnitz) Sean M1 y M2 dos variedades diferenciables y consideremos M = M1 ×
M2 la variedad diferenciable producto. Sea Φ : M −→ P una aplicación diferenciable. Prueba
que
(dΦ)(p,q) (v) = (dΦq )p (v1 ) + (dΦp )q (v2 ),
donde Φp = Φ ◦ jp , Φq = Φ ◦ iq y v = (v1 , v2 ). Como consecuencia, si f : M →
función diferenciable sobre M , entonces
R es una
v(f ) = v1 (fq ) + v2 (fp ).
E.3.2. Consideremos la aplicación σ : Rn+1 \{0} −→ Sn definida por σ(z) =
z
.
|z|
(a) Prueba que σ es una aplicación diferenciable.
(b) Calcula su diferencial, ası́ como su rango y su núcleo.
E.3.3. Sea M n una variedad diferenciable n-dimensional y consideremos f : M → Rm una inmersión.
Denotamos por N M el fibrado normal de M en Rm , es decir,
N M = {(p, v) ∈ M × Rm : v ∈ Tp⊥ M ⊂ Rm }
Definimos la aplicación ϕ : N M → Rm por ϕ(p, v) = f (p) + v. Prueba que ϕ es una aplicación
regular en (p, 0) para todo punto p de M .
56
VARIEDADES DIFERENCIABLES Y TOPOLOG ÍA
ANOTACIONES
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
...........................................................................................
DIFERENCIACI ÓN EN VARIEDADES
6.
57
BIOGRAFÍA: LAZARE CARNOT (-)
Lazare Nicolas Marguerite Carnot (-) nació en Nolay, en Borgoña. Ingresó en la
Escuela Militar de Mézieres donde, al ser plebeyo y no tener tı́tulo, sólo podı́a llegar a capitán. Fue
alumno de Gaspard Monge (-) y en comenzó su carrera como ingeniero militar. Sus
trabajos cotidianos en materia de fortificaciones le dejaban tiempo suficiente para leer y escribir, tanto
sobre cuestiones cientı́ficas como sobre problemas de interés más amplio.
En , Carnot publica su Ensayo sobre las máquinas en general, obra que se refiere a los
principios, las leyes generales del choque y la ley de conservación del trabajo. En la misma época
presenta una memoria sobre los dirigibles a la Academia de Ciencias, creyendo firmemente en su gran
utilidad en la guerra. Carnot no puede esperar un ascenso rápido, y su espı́ritu demasiado independiente
le lleva a enemistarse con las autoridades del real cuerpo de ingenieros militares. Si se añade a esto
su imposibilidad de contraer matrimonio con su amada, no hace falta nada más para enfrentarle a las
instituciones y las autoridades del antiguo régimen.
En es elegido diputado en la Asamblea legislativa, en donde encarna los méritos y las pretensiones de la burguesı́a con talento; su resolución y su actividad le aseguran rápidamente una notoriedad
local. La Convención le llama, en , para dirigir los destinos del ejército del norte. Su victoria
de Wattignies le valdrá el tı́tulo de “Organizador de la Victoria”. A su vuelta a Paris vota la muerte
de Luis XVI, apareciendo ante los ojos de todos como un terrorista, un hombre sin partido y violento.
Después del golpe de Fructidor en huye, porque se le acusa de complicidad con la causa realista.
Matemáticamente, la proscripción de Carnot se convirtió en algo bueno, ya que le dio la oportunidad,
aunque en el exilio, para completar un trabajo que habı́a concebido hacı́a tiempo. Uno espera que un
hombre que se ha dedicado a tareas de enorme exigencia práctica, como lo habı́a estado Carnot, piense
en cosas de utilidad práctica inmediata. Sin embargo, en , Carnot publica su libro Réflexions sur la
métaphysique du calcul infinitésimal (Reflexiones sobre la metafı́sica del cálculo infinitesimal), con las
cuales Carnot intenta demostrar que los métodos de Isaac Newton (-) y Gottfried Wilhelm
Leibnitz (-) son algoritmos equivalentes al método de exhaución de Arquı́medes (-
A.C.).
Figura 3.2: Grabado de Lazare Carnot
Durante la segunda mitad del siglo XVIII existı́a un gran entusiamos por los resultados que se obtenı́an con el cálculo infinitesimal, aunque también habı́a preocupación acerca de sus principios básicos.
58
VARIEDADES DIFERENCIABLES Y TOPOLOG ÍA
Ninguna de las interpretaciones habituales (las fluxiones de Newton, las diferenciales de Leibnitz o
los lı́mites de d’Alembert) eran satisfactorias, por lo que Carnot se propuso aclarar en qué consistı́a
el nuevo análisis. Sin embargo, su elección del principio unificador no pudo ser más desacertada. Su
conclusión fue que los verdaderos principios metafı́sicos son los principios de compensación de errores.
Según su razonamiento, los infinitesimales son cantidades despreciables que son introducidas, al igual
que los números imaginarios, para facilitar los cálculos, y son eliminadas para alcanzar el resultado final. Asimismo, las ecuaciones imperfectas se vuelven perfectamente exactas en el cálculo mediante la
eliminación de cantidades tales como los infinitésimos de orden superior, que son una fuente de errores.
Las Reflexiones de Carnot llegaron a ser muy populares, editandose en varios paı́ses y lenguas.
A pesar de su desacertada aproximación al cálculo, no cabe duda de que su punto de vista ayudó a que
se examinara con más rigor. Sin embargo, la reputación actual de Carnot debemos buscarla en otros
libros. En publica De la correlation des figures de géométrie (De la correlación de las figuras de
geometrı́a), un trabajo caracterizado por su alto grado de generalidad. Carnot intentó establecer para la
geometrı́a pura una universalidad comparable a la que disfrutaba la geometrı́a analı́tica.
Carnot desarrolló su correlación de las figuras en la obra Géométrie de position (Geometrı́a de
posición, ), que le sitúa junto a Monge como un fundador de la geometrı́a pura moderna. El
desarrollo de las matemáticas se caracteriza por la consecución de mayores cotas de generalidad, y es
esta cualidad la que caracteriza la obra de Carnot. Su inclinación hacia la generalización le conduce a
formas elegantes equivalentes de teoremas bien conocidos. Esta misma inclinación le incita a realizar
investigaciones para determinar las coordenadas “intrı́nsecas”, es decir, las coordenadas naturales de
una curva. Carnot pensaba que deberı́an existir unas coordenadas que no dependieran de unas hipótesis
particulares o de una base elegida para el espacio absoluto. Por ejemplo, las coordenadas de un punto
sobre una curva pueden ser el radio de curvatura y la longitud de arco, como sugiere Ernesto Cesaro
(-) en su obra Geometrı́a intrı́nseca.
El nombre de Carnot ha quedado unido a un teorema que aparece en su obra Essai sur le théorie
des transversales (Ensayo sobre la teorı́a de las transversales, ). Este teorema constituye una
generalización de un teorema de Menelao de Alejandrı́a: dada una curva algebraica cualquiera de
orden n que corta a un triángulo ABC, sea A1 el producto de las n distancias, reales o imaginarias, de
A a los n puntos de intersección de la curva con el lado AB, y lo mismo para B1 y C1 , definidas por los
lados BC y CA; sean A2 , B2 y C2 los productos semejantes correspondientes a los lados AC, CB y
BA, respectivamente. Entonces se verifica
A1 B1 C1 = A2 B2 C2
Si la curva es una lı́nea recta, es el teorema de Menelao; si la curva es una cúbica, del teorema de Carnot
se deduce que los tres puntos de inflexión se sitúan en una lı́nea recta, resultado bien conocido en la
época.
La teorı́a de transversales es sólo una pequeña parte de un trabajo que contiene otras interesantes
generalizaciones. De la conocida fórmula de Heron de Alejandrı́a para el área de un triángulo en
términos de sus tres lados a, b y c:
p
A = s(s − a)(s − b)(s − c),
donde s es el semiperı́metro, Carnot buscó la fórmula para el volumen de un tetraedro en función de sus
seis aristas, y encontró una fórmula con 130 términos.
Las obras de Carnot conocieron un gran éxito e influyeron considerablemente en las investigaciones geométricas de principios del siglo XIX, por la difusión del conocimiento de numerosos teoremas,
DIFERENCIACI ÓN EN VARIEDADES
59
de los que un gran número eran de naturaleza proyectiva, popularizando la geometrı́a de la regla y
volviendo a habituar a los geómetras al estudio de las transformaciones geométricas.
Bibliografı́a
Carl B. Boyer. A History of Mathematics. Princeton University Press, 1985. pp. 523–529.
Florian Cajori. A History of Mathematics. Chelsea Publising Company, 1995. pp. 276–277.
Jean-Paul Collete. Historia de las matemáticas, vol. II. Siglo veintiuno de España Editores, S.A., 1985.
pp. 261–265.
Internet. URL de la página:
www-history.mcs.st-andrews.ac.uk/history/Mathematicians/Carnot.html
Bibliografı́a complementaria
Dictionary of Scientific Biography (New York 1970-1990).
Encyclopaedia Britannica
Libros:
H. Dupre Lazare Carnot, Republican Patriot (1975).
C.C. Gillispie Lazare Carnot Savant (Princeton, 1971).
J. Harthong Lazare Carnot et le calcul infinitésimal, Séminaires de mathématiques. Science, histoire,
société (Rennes, 1984).
Artı́culos:
H. Barreau Lazare Carnot et la conception leibnizienne de l’infini mathématique, La mathématique non
standard (Paris, 1989), 43-82.
C.B. Boyer Carnot and the concept of deviation, The American Mathematical Monthly 61 (1954), 459463.
E.-J. Giessmann Lazare Carnot : Biografischer Abriss aus Anlass der Centenaire der überführung in
das Pantheon zu Paris, 200 Jahre Grosse Französische Revolution, Wiss. Z. Tech. Univ. Magdeburg 33 (2) (1989), 3-15.
T. Hänseroth y K. Mauersberger Lazare Carnots Werk im Lichte der Herausbildung der Bau- und Maschinenmechanik in Frankreich, 200 Jahre Grosse Französische Revolution, Wiss. Z. Tech. Univ.
Magdeburg 33 (2) (1989), 45-54.
R. Irrgang Lazare Carnots naturwissenschaftliche Schriften, 200 Jahre Grosse Französische Revolution, Wiss. Z. Tech. Univ. Magdeburg 33 (2) (1989), 55-60.
D. Krone Leben und Wirken von Lazare Carnot aus der Sicht seines Biographen Wilhelm Körte, 200
Jahre Grosse Französische Revolution, Wiss. Z. Tech. Univ. Magdeburg 33 (2) (1989), 23-27.
60
VARIEDADES DIFERENCIABLES Y TOPOLOG ÍA
H. Meyer Unendlichkeitsbegriff und Infinitesimalrechnung im Denken Lazare Carnots, 200 Jahre Grosse Französische Revolution, Wiss. Z. Tech. Univ. Magdeburg 33 (2) (1989), 61-62.
R. Thiele A French officer in Prussian Magdeburg, The Mathematical Intelligencer 15 (1) (1993), 5357.
R. Thiele Carnots Betrachtungen über die Grundlagen der Infinitesimalrechnung, en Rechnen mit dem
Unendlichen (Basel, 1990), 79-94.