MEMORIA Autor: Luis Gerardo Guerra Sánchez Director: Juan
Anuncio

Localización Óptima de Generación Distribuida en
Sistemas de Distribución Trifásicos con Carga Variable en
el Tiempo Utilizando el Método de Monte Carlo
MEMORIA
Autor: Luis Gerardo Guerra Sánchez
Director: Juan Antonio Martínez Velasco
Convocatòria: Semestre Primavera Curso 2011-2012
Màster Interuniversitari UB-UPC
d’Enginyeria en Energia
Màster Interuniversitari UB-UPC d’Enginyeria en Energia
Sol·licitud d’acceptació de presentació del Projecte Final de Màster i
sol·licitud de defensa pública.
Alumne: Luis Gerardo Guerra Sánchez
DNI: 02545885
Títol: Localización óptima de generación distribuida en sistemas de distribución
trifásicos con carga variable en el tiempo utilizando el método de Monte Carlo
Director: Juan Antonio Martínez Velasco
Acceptació de la presentació del projecte:
Confirmo l’acceptació de la presentació del Projecte Final de Màster.
Per a que consti,
Martínez Velasco, Juan Antonio
Cognoms, nom (director del Projecte)
Sol·licito:
La defensa pública del meu Projecte Final de Màster.
Per a que consti,
Guerra Sánchez, Luis Gerardo
Cognoms, nom (Alumne)
Barcelona, 24 de Febrero de 2012
Resumen
En el presente trabajo se desarrolla un método para determinar la localización óptima de un
generador distribuido que inyecta únicamente potencia activa en un alimentador radial con carga
uniformemente distribuida. El algoritmo desarrollado se basa en el método de Monte Carlo y
permite obtener los valores óptimos de potencia y posición del generador. El algoritmo también
sirve para determinar la localización óptima de bancos de condensadores con el objetivo de
obtener una reducción óptima de las pérdidas.
Índice general
1. Introducción
1.1. Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2. Estructura del documento . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2. Sistemas de distribución de energı́a eléctrica
2.1. Transporte y distribución de energı́a eléctrica . . . . .
2.2. Estructura del sistema de distribución . . . . . . . . .
2.3. Configuración de circuitos primarios de distribución . .
2.3.1. Alimentador único . . . . . . . . . . . . . . .
2.3.2. Lazo abierto . . . . . . . . . . . . . . . . . .
2.4. Configuración de circuitos secundarios de distribución
2.4.1. Configuración tipo spot . . . . . . . . . . . . .
2.4.2. Configuración tipo red . . . . . . . . . . . . .
2.5. Configuración de subestaciones de distribución . . . .
2.5.1. Subestaciones de distribución rurales . . . . .
2.5.2. Subestaciones de distribución suburbanas . . .
2.5.3. Subestaciones de distribución urbanas . . . . .
2.6. Equipos presentes en los sistemas de distribución . . .
2.7. Recursos energéticos distribuidos . . . . . . . . . . . .
2.7.1. Generación distribuida . . . . . . . . . . . . .
2.7.2. Almacenamiento de energı́a . . . . . . . . . .
3
4
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
6
8
10
10
11
11
12
12
13
13
14
14
16
18
19
19
3. OpenDSS
3.1. OpenDSS como aplicación independiente . . . . . . . . . . . . . . .
3.1.1. Simulación de caso ejemplo desde la aplicación independiente
3.2. Acceso a OpenDSS desde Matlab . . . . . . . . . . . . . . . . . . .
3.2.1. COM Server . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.2. Control de OpenDSS desde Matlab . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
21
23
23
27
28
28
4. Localización óptima de generación distribuida
4.1. Métodos de localización óptima de generación distribuida . . . . . . . . . . . .
4.1.1. Regla de los 2/3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
33
33
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4.1.2.
4.1.3.
4.1.4.
4.1.5.
Métodos analı́ticos . . . . .
Flujo de carga óptimo . . .
Algoritmos genéticos . . . .
Algoritmos metaheurı́sticos
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
33
36
37
39
5. Localización óptima de un generador distribuido utilizando el método de Monte
Carlo
5.1. Implementación del método . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1. Entrada de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.2. Simulación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.3. Salida de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2. Red de estudio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1. Transformador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.2. Definición de las lı́neas . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.3. Cargas del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.4. Definición del sistema en OpenDSS . . . . . . . . . . . . . . . . . . .
5.3. Procedimiento matemático para determinar la localización óptima de un generador distribuido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4. Localización óptima de un generador distribuido con carga constante . . . . . .
5.4.1. Caso base sin generación distribuida . . . . . . . . . . . . . . . . . . .
5.4.2. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.3. Simulación de caso óptimo . . . . . . . . . . . . . . . . . . . . . . . .
5.5. Localización óptima de un generador distribuido con carga variable en el tiempo
5.5.1. Caso base sin generación distribuida . . . . . . . . . . . . . . . . . . .
5.5.2. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.3. Simulación de caso óptimo . . . . . . . . . . . . . . . . . . . . . . . .
5.5.4. Impacto de la restricción de flujo inverso . . . . . . . . . . . . . . . .
5.5.5. Localización óptima de dos generadores distribuidos . . . . . . . . . .
5.6. Localización óptima de bancos de condensadores . . . . . . . . . . . . . . . .
5.6.1. Localización óptima teórica de bancos de condensadores . . . . . . . .
5.6.2. Localización óptima de un banco de condensadores . . . . . . . . . . .
5.6.3. Localización óptima de dos bancos de condensadores . . . . . . . . . .
55
61
61
62
63
65
65
66
68
69
71
72
72
73
74
6. Conclusiones
6.1. Conclusiones sobre la implementación del método . . . . . . . . . . . . . . . .
6.2. Conclusiones sobre los resultados obtenidos . . . . . . . . . . . . . . . . . . .
6.3. Objetivos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
77
78
79
2
45
46
47
49
50
50
50
51
51
51
Capı́tulo 1
Introducción
En la actualidad existe una tendencia marcada que indica que la construcción de grandes
plantas generadoras ya no es la mejor opción para atender el aumento de demanda eléctrica. Los
altos costos que implica la construcción de dichas plantas, la actual preocupación por reducir
la emisión de gases de efecto invernadero y otros problemas de tipo legal, por ejemplo obtener
permisos medio ambientales para la construcción de nuevas lı́neas, ha causado que la industria
vuelva sus ojos a un sector que tiene una gran capacidad de crecimiento y que presenta grandes
beneficios para el sistema, la generación distribuida y en un marco más amplio, los recursos
energéticos distribuidos.
Como ya fue mencionado, la introducción de los recursos distribuidos puede traer consigo
grandes beneficios al sector. Sin embargo, la construcción y conexión de generadores distribuidos no puede ser hecha sin antes considerar cual será el impacto real. Estudios de planificación
deben de ser llevados a cabo para garantizar el completo aprovechamiento de los beneficios
de la generación distribuida y prever cualquier complicación que pueda surgir de ésta. En este
sentido los paquetes de simulación representan una herramienta valiosa al momento de realizar
la planificación a futuro de un sistema de distribución de energı́a eléctrica que desee expandirse
e incluir recursos distribuidos.
La localización óptima de un generador distribuido es un aspecto clave para garantizar que
la introducción de generación distribuida en los sistemas eléctricos de potencia tenga éxito.
Hasta la fecha se ha desarrollado una gran variedad de metodologı́as para determinar dicha
localización óptima. Algunos de estos métodos utilizan enfoques analı́ticos que incluyen simplificaciones, mientras que otros utilizan algoritmos de gran complejidad. La exactitud de los
resultados obtenidos depende mucho del método utilizado, por lo que todavı́a hoy es necesario
mejorar los métodos desarrollados de forma que se mejoren su precisión, sean relativamente
simples de implementar, y eficientes.
3
1.1.
Objetivo
El objetivo del presente Proyecto de Fin de Master es el desarrollo e implementación de un
método de localización óptima de generadores distribuidos utilizando varias herramientas de
simulación ası́ como otros paquetes de software que permitan el post-procesamiento de datos.
El método deberı́a ser exacto, manejar sistemas que incluyan modelos reales, y además eficiente
por lo que respecta al tiempo necesario para obtener resultados.
El método desarrollado en este trabajo ha sido previamente presentado en el artı́culo:
J.A. Martinez and G. Guerra,“Optimum Placement of Distributed Generation in ThreePhase Distribution Systems with Time Varying Load Using a Monte Carlo Approach”.
Aprobado para su presentación en el IEEE PES GM a celebrarse en San Diego C.A.,
Julio 2012.
1.2.
Estructura del documento
Segundo capı́tulo
En el segundo capı́tulo se desarrolla una introducción a los sistemas de distribución de
energı́a eléctrica. Se presentan las diferentes caracterı́sticas y configuraciones propias de los
sistemas de distribución de energı́a eléctrica reales.
Tercer capı́tulo
En el tercer capı́tulo se introduce el software de simulación OpenDSS, presentándose sus capacidades y caracterı́sticas como una herramienta de análisis y planeación de sistemas de distribución. Se desarrolla un ejemplo a través del cual es explicado el funcionamiento de OpenDSS
como aplicación independiente y como una aplicación controlada desde un paquete de software
externo, en este caso Matlab.
Cuarto capı́tulo
En el cuarto capı́tulo se presenta un resumen con distintos métodos de localización óptima
de generadores distribuidos utilizados por otros autores; además se desarrolla un ejemplo que
demuestra la filosofı́a detrás de cada uno de los métodos presentados.
Quinto capı́tulo
En el quinto capı́tulo se presenta el método de localización óptima de generadores distribuidos desarrollado para el presente Proyecto de Fin de Máster. La implementación del método es
explicada a detalle y se muestran los resultados obtenidos a partir de las simulaciones llevadas
4
a cabo, las cuales comprenden la localización óptima de un generador distribuido con carga
constante y con carga variable en el tiempo.
Sexto capı́tulo
En el sexto capı́tulo se discuten las conclusiones alcanzadas a partir de la implementación
del método y de los resultados obtenidos a través de las simulaciones. Además, se discuten
mejoras futuras al método presentado.
5
Capı́tulo 2
Sistemas de distribución de energı́a
eléctrica
2.1.
Transporte y distribución de energı́a eléctrica
Los sistemas de entrega de energı́a eléctrica han sido diseñados para poder llevar la energı́a
eléctrica que se produce en los centros de generación hasta los puntos donde los consumidores
finales hacen uso de ella. Estos sistemas están formados por otros subsistemas, los cuales en
un mercado liberalizado no pertenencen a un mismo propetario y cada uno representa un mercado independiente donde la libre competencia está permitida. En la Figura 2.1 se presenta el
esquema general de los sistemas de entrega de energı́a eléctrica.
Grandes centros de generación
La mayor parte de la energı́a eléctrica es producida en centros que cuentan con unidades
generadoras de gran potencia. Dichos centros se encuentran alejados de los puntos de consumo
y utilizan diferentes tecnologı́as para producir energı́a eléctrica tales como energı́a nuclear,
carbón, gas, hidroeléctrica, etc. Muchas de estas plantas fueron construidas en el pasado cuando
la totalidad del sistema de entrega de energı́a eléctrica se encontraba bajo el control de una
sola entidad, la cual aprovechaba las ventajas ofrecidas por la economı́a de escala para poder
construir grandes plantas de generación que fuesen rentables.
Sistema de transporte
El sistema de transporte comprende el conjunto de lı́neas, subestaciones y equipos encargados de conectar los grandes centros de generación con los grandes núcleos de demanda, los
cuales se encuentran localizados en las ciudades y en zonas industriales. Las lı́neas pertenecientes al sistema de transporte recorren grandes distancias y transportan grandes cantidades de
energı́a, por lo que éstas deben de trabajar a valores de tensión muy altos (220 y 400 kV).
6
Sistema de subtransporte/reparto
El sistema de subtransporte constituye un paso intermedio entre el sistema de transporte y
el sistema de distribución. Las lı́neas que comprenden este sistema recorren menores distancias
y transportan menores potencias que aquellas que pertenecen al sistema de transporte, por lo
que trabajan a valores menores de tensión (132, 66 y 45 kV). El sistema de subtransporte también cuenta con subestaciones transformadoras debido a la diferencia de tensión que existe con
respecto al sistema de transporte. Cabe la posibilidad que grandes consumidores posean una
conexión en este punto del sistema, por ejemplo fábricas y otras industrias.
Figura 2.1: Estructura sistema de entrega de energı́a eléctrica
7
Sistema de distribución primaria
El sistema de distribución primaria recibe la energı́a de los sistemas de transporte o subtransporte en las subestaciones de distribución donde se produce una nueva reducción del valor
de tensión. De dichas subestaciones parten lı́neas o alimentadores a media tensión (25 y 11 kV)
y que llevan la energı́a un paso más cerca de los centros de consumo. Al igual que en el sistema de subtransporte pueden existir clientes que estén conectados directamente al sistema de
distribución primaria.
Sistema de distribución secundaria
El sistema de distribución secundaria comprende las estaciones transformadoras y lı́neas de
baja tensión (400, 230 V) que suministran la energı́a a los clientes con poca potencia instalada,
por ejemplo consumos domésticos..
2.2.
Estructura del sistema de distribución
En un sistema de distribución de energı́a eléctrica el elemento que funciona como enlace
entre éste y el resto del sistema es la subestación de distribución. A las subestaciones llegan
las lı́neas de alta tensión provenientes del sistema de subtransporte. El transformador reductor
toma la tensión proveniente del sistema aguas arriba y la reduce al nivel de tensión de los circuitos primarios de distribución. La subestación cuenta con todos los equipos de protección,
maniobra y medida necesarios para garantizar una operación segura. Los circuitos primarios de
distribución parten de la subestación y se dirigen a las diferentes zonas de consumo. Los circuitos primarios se conocen también como alimentadores y de éstos nacen circuitos laterales, sin
existir ninguna reducción de tensión; los circuitos laterales se extienden hasta encontrar los centros de transformación, en los cuales tiene lugar la última reducción para obtener los niveles de
tensión adecuados para el funcionamiento de los equipos de los usuarios finales (400, 230 V).
De las estaciones de transformación surgen los circuitos secundarios de distribución, los cuales
transportan la energı́a hasta el punto de conexión con la instalación de los usuarios; generalmente se trata de circuitos monofásicos, aunque también pueden existir circuitos trifásicos. En
ambientes rurales la construcción de los circuitos de distribución es de tipo aérea, mientras que
en las zonas urbanas son mayoritariamente subterráneas; en sistemas suburbanos se encuentra
una combinación de lı́neas aéreas y subterráneas. Las zonas industriales representan grandes
consumos, por lo que usualmente cuentan con circuitos propios para el suministro de energı́a.
La Figura 2.2 muestra una configuración habitual de una subestación de distribución de energı́a
eléctrica y el trazado de un alimentador que parte de dicha subestación.
8
Figura 2.2: Configuración tı́pica de un sistema de distribución de energı́a eléctrica
9
2.3.
Configuración de circuitos primarios de distribución
La configuración más habitual para un circuito primario de distribución es la de un circuito
radial. Esta configuración presenta ciertas ventajas ante los circuitos mallados.
La protección contra fallas es más sencilla.
Los niveles de corriente de falla son menores.
La regulación de tensión es más simple de implementar.
El control del flujo de potencia es más sencillo.
El sistema resulta menos costoso.
La configuración de circuito radial puede presentar diversas variantes:
Alimentador único.
Lazo abierto.
2.3.1.
Alimentador único
En esta configuración tal como su nombre lo indica toda la energı́a requerida por los circuitos laterales y secundarios es suministrada por un único alimentador que parte desde la subestación. Si por alguna razón dicho alimentador quedara fuera de servicio (falla, mantenimiento,
etc.), todas las cargas alimentadas se quedarı́an sin servicio. Aunque solo exista un alimentador
que parte de la subestación, éste puede ramificarse para poder cubrir una mayor área; estas ramificaciones no deben de ser confundidas con los circuitos laterales, ya que los circuitos laterales
poseen una capacidad inferior a la del alimentador principal, mientras que las ramificaciones
poseen la misma capacidad. En la Figura 2.3 se muestra la configuración de alimentador único
simple y ramificado.
Figura 2.3: Configuración alimentador único (simple y ramificado)
10
2.3.2.
Lazo abierto
En la configuración de lazo abierto existen dos alimentadores que parten de la misma subestación y que están unidos en sus extremos por un seccionador que se encuentra normalmente
abierto. Cada alimentador posee un cierto número de circuitos a los cuales suministra energı́a
en condiciones normales pero tiene la capacidad de suministrar la potencia requerida por los
circuitos asigandos al otro alimentador. En caso de que uno de los alimentadores salga de servicio el seccionador será operado, ya sea vı́a manual o automática, y las cargas suministradas por
el alimentador fuera de servicio serán transferidas al alimentador activo. La Figura 2.4 muestra
un ejemplo de la configuración de lazo abierto.
Figura 2.4: Configuración lazo abierto
2.4.
Configuración de circuitos secundarios de distribución
Los circuitos secundarios pueden presentar diferentes configuraciones en función del tipo
de cargas que deben de alimentar. En este caso presentaremos dos configuraciones que están
presentes en sistemas urbanos, ya que en sistemas suburbanos y rurales la configuración más
habitual será la radial. En la primera configuración la carga a alimentar es un gran consumo
que se encuentra concentrado en un solo punto, como podrı́a ser un edificio de apartamentos de
un tamaño considerable, por lo que se le conocerá como configuración tipo spot. La segunda
11
configuración se presenta cuando los circuitos secundarios alimentan un gran número de cargas
y forman una red mallada, ésta será conocida como configuración tipo red.
2.4.1.
Configuración tipo spot
Este tipo de configuración es utilizada para alimentar una gran carga que se encuentra concentrada en un solo punto, utiliza entre tres y cinco alimentadores para suministrar energı́a a la
carga, usualmente es diseñada para poder seguir operando sin uno o dos de sus alimentadores.
Cada alimentador llega a un transformador que reduce la tensión al valor requerido por la carga
y cuenta con un disposito de protección ubicado en el lado de baja tensión (Ver Figura 2.5).
Figura 2.5: Configuración tipo spot
2.4.2.
Configuración tipo red
La configuración tipo red utiliza entre cinco y diez alimentadores que parten de una misma
subestación y que alimentan a muchas cargas repartidas en un área de considerable tamaño.
Los alimentadores llegan a centros de transformación de los cuales surgen circuitos secundarios
que forman una red mallada. Las cargas se conectan directamente a los circuitos secundarios
y éstas pueden ser de tipo residencial o comercial, monofásicas o trifásicas. Los centros de
transformación estan equipados con dispositivos de protección en el lado del secundario (Ver
Figura 2.6).
12
Figura 2.6: Configuración tipo red
2.5.
Configuración de subestaciones de distribución
La configuración de las subestaciones de distribución dependerá si se trata de un sistema
rural, suburbano o urbano, ya que los niveles de carga varı́an grandemente y por lo tanto la
configuración y la cantidad de equipos utilizados no serán los mismos.
2.5.1.
Subestaciones de distribución rurales
Las subestactiones diseñadas para sistemas rurales utilizan la configuración más simple;
debido a que los niveles de carga no son muy altos generalmente solo necesitan de un transformador para suplir toda la demanda, dependiendo de la potencia del transformador este puede
estar protegido por relés o fusibles. Estas subestaciones presentan un bus único de alta tensión y
un bus único de media tensión, al cual se encuentran conectados los circuitos primarios. Dichos
circuitos cuentan con un reenganchador o un interruptor automático en la cabecera del mismo
para su protección. La Figura 2.7 muestra una configuración tı́pica para una subestación rural
de distribución de energı́a eléctrica.
13
Figura 2.7: Configuración tı́pica subestación rural
2.5.2.
Subestaciones de distribución suburbanas
Las subestaciones de tipo suburbano deben de hacer frente a niveles de carga mayores que
los presentes en sistemas rurales, por tal razón es necesario la instalación de más de un transformador para suministrar la carga del sistema. Estas subestaciones poseen un bus único de alta
tensión, al cual se conectan los transformadores, mientras que en el secundario cada transformador posee su propio bus de media tensión. Los buses de media tensión se encuentran conectados
a través de interruptores que permanecen normalmente abiertos. En caso de que la subestación
cuente con dos transformadores, si uno de ellos falla el interruptor es operado y el transformador que se mantiene en servicio suministrará la potencia requerida por todos los circuitos de la
subestación (Ver Figura 2.8). Esta configuración conocida como bus partido ayuda a disminuir
el nivel de corriente de falla, facilita la regulación de tensión y evita la aparición de corrientes
circulantes entre los transformadores. Algunas compañı́as prefieren no hacer uso de esta configuración sino que utilizan un único bus de media tensión, esta configuración posee la gran
ventaja que facilita el reparto de carga entre los transformadores, evitando que uno trabaje a un
mayor nivel de carga que el otro.
2.5.3.
Subestaciones de distribución urbanas
En el diseño de subestaciones urbanas se utilizan configuraciones mucho más complicadas, entre las más comunes están la configuración en anillo y la de interruptor y medio. En
la configuración en anillo en el lado de media tensión se forma un arreglo cerrado donde los
secundarios de los transformadores y los circuitos primarios están conectados a las aristas del
anillo, mientras que en la configuración de interruptor y medio existen dos buses media tensión,
para cada rama entre ellos se instalan tres interruptores. Entre cada par de interruptores puede
conectarse ya sea un circuito primario o el secundario de un transformador. Ambas configuraciones brindan una gran flexibilidad al momento de transferir carga y dar mantenimiento a los
elementos de la subestación. En la Figura 2.9 se presentan ejemplos de las configuraciones en
anillo e interruptor y medio.
14
Figura 2.8: Configuración tı́pica subestación suburbana
Figura 2.9: Configuración tı́pica subestación urbana (anillo e interruptor y medio)
15
2.6.
Equipos presentes en los sistemas de distribución
Existe una gran cantidad de equipos instalados en un sistema de distribución, desde equipos
de potencia como transformadores e interruptores automáticos hasta equipos de monitorización
y automatización.
Lı́neas
Las lı́neas son las encargadas de transportar la energı́a entre dos puntos distantes. Para lı́neas
de tipo aéreo se utiliza cable desnudo de aluminio, siendo común el uso del cable ACSR; mientras que para lı́neas subterráneas se utiliza cables aislados, un tipo asilamiento habitual para
cables de potencia es el XLPE. Los cables utilizados para la construcción de lı́neas se caracterizan por el nivel de corriente que pueden transportar y en el caso de los cables aislados también se
considera la tensión que el aislamiento puede soportar bajo condiciones normales de operación.
Transformadores de distribución
El transformador es el encargado de convertir un determinado nivel de tensión a otro. Un
transformador cuenta con al menos dos devanados que se encuentran acoplados magnéticamente. El campo magnético es el encargado de la transferencia de potencia. Un transformador
está caracterizado por las tensiones en el lado de alta y baja, y por el grupo de conexión de
sus devanados (en el caso de transformadores trifásicos). En los sistemas de distribución se encuentran en las subestaciones donde reducen el nivel de tensión proveniente del sistema aguas
arriba al nivel de tensión utilizado por los circuitos primarios; también están presentes en los
centros de transformación donde tiene lugar la reducción a baja tensión. Los transformadores de
subestación pueden contar con un cambiador automático de tomas bajo carga para regulación
de tensión.
Interruptores automáticos
Son dispositivos de corte encargados de aislar elementos del sistema cuando exista una condición de falla. Los interruptores automáticos deberán ser capaces de transportar la corriente
producida durante una falla e interrumpirla. Éstos se encuentran instalados en las subestaciones
donde son utilizados para proteger transformadores y circuitos primarios. Los interruptores automáticos son escogidos en base al nivel de tensión al cual deben operar y el nivel de corriente
máxima que pueden soportar e interrumpir.
Transformadores de tensión
Los niveles de tensión con los cuales se trabaja en los circuitos primarios no pueden ser
medidos directamente por lo que es necesario reducirlos a un nivel que sea seguro para realizar
la medición. Los transformadores de tensión son los encargados de reducir la tensión del sistema
a una tensión de un valor menor (120 V) y que será utilizada como señal para monitorización
16
del sistema. Estos transformadores poseen únicamente la potencia suficente para alimentar a los
equipos de medición conectados a él. Los transformadores de tensión se encuentran instalados
mayormente dentro de las subestaciones.
Transformadores de corriente
Los transformadores de corriente cumplen una función análoga a la de los transformadores
de tensión, éstos toman la corriente que circula por un circuito y la reducen a un nivel mucho
menor que puede ser registrado por los aparatos de medida (5 A). La construcción más habitual
para este tipo de transformadores es la toroidal, en ella el conductor que transporta la corriente
atraviesa un toroide donde se encuentran alojados los devanados, aprovechando el efecto de
inducción se generará una corriente en el secundario cuyo valor dependerá de la relación de
transformación. Al igual que los transformadores de tensión, los transformadores de corriente
solo poseen la potencia suficiente para alimentar a los equipos de medición.
Relés
Son dispositivos basados en electrónica y cuyo objetivo es recoger las señales provenientes
de los equipos de medición con el objetivo de determinar si existe alguna condición de falla en
el sistema. En sistemas de distribución los relés utilizados son de sobrecorriente, es decir, ante
la presencia de una sobrecorriente peligrosa generan una señal que es enviada a los interruptores
automáticos que serán los encargados de interrumpir dicha corriente de falla.
Reenganchadores
Son dispositivos de corte capaces de interrumpir corrientes bajo condición de falla, además
poseen la capacidad de realizar un recierre automático con la finalidad de verficar si la falla
detectada ha sido una falla temporal o permanente. Los reenganchadores pueden efectuar hasta
3 intentos de recierre antes de quedar en posición abierta. Son normalmente utilizados para
proteger circuitos laterales y en algunos casos a los circuitos primarios. Los reenganchadores
pueden ser controlados por relés o por otro tipo de sistema mecánico.
Fusibles
El fusible es un elemento utilizado para proteger circuitos laterales, secundarios y transformadores de baja potencia. Está constituido por un filamento el cual se derrite debido al calor
generador por el paso de un corriente excesiva. Los fusibles están diseñados de tal manera que
el tiempo en el cual se derrite depende del valor de la corriente, dicho tiempo sigue una curva
especı́fica para cada tipo de fusible. Los tipos de fusibles más comúnes son los de tipo K y T.
17
Seccionadores
Son instrumentos de maniobra que permiten aislar elementos del sistema para su reparación
o mantenimiento. Pueden ser operados de forma manual o automática y deben de ser capaces
de transportar sin problemas la corriente normal de operación y la producida durante un fallo,
sin embargo por seguridad solo deben ser operados cuando están sometidos a un nivel bajo de
carga. Los seccionadores son instalados principalmente en las subestaciones y en los circuitos
primarios.
Reguladores de tensión
Los reguladores de tensión son transformadores con una relación de transformación de 1 a
1 y que se encuentran equipados con un cambiador de tomas bajo carga. Los reguladores de
tensión son instalados en puntos intermedios de alimentadores que deben de recorrer grandes
distancias y su tarea es la de compensar la caı́da de tensión producida a lo largo del alimentador, mejorando el nivel de tensión entregado a los usuarios que se encuentran aguas abajo del
regulador.
Bancos de condensadores
Los bancos de condensadores son utilizados para aportar potencia reactiva al sistema, la
cual tiene como objetivo la regulación de tensión y la reducción de pérdidas. Los bancos de
condensadores son generalmente trifásicos con conexión estrella, pueden ser instalados en las
subestaciones o en un puntos intermedios de un circuito primario.
SCADA
Control del sistema y adquisición de datos (SCADA por sus siglas en inglés) es un sistema
que permite monitorear en tiempo real el estado completo del sistema. Éste recoge información
de los equipos de medida instalados a través de toda la red y la presenta de tal forma que es posible conocer tensión en buses, corriente que circula por un circuito e incluso si un seccionador
se encuentra en posición abierta o cerrada. También incluye funciones de control que permiten
operar remotamente seccionadores e interruptores, aportando una gran flexibilidad al sistema y
mejorando los tiempos de respuesta al momento de realizar maniobras.
2.7.
Recursos energéticos distribuidos
Los recursos energéticos distribuidos son tecnologı́as desarrolladas para el suministro, almacenamiento y control de la energı́a eléctrica que se encuentran conectadas a un sistema de
distribución de energı́a eléctrica. Los continuos avances tecnológicos en este campo ası́ como en
el de las telecomunicaciones y el control abren un panorama en el cual los recursos energéticos
18
distribuidos pueden jugar un papel importante en el futuro. El éxito de esta tecnologı́a dependerá en gran medida de la creación de polı́ticas que fomenten su desarrollo y de la disposición
de las empresas a apostar por ella.
2.7.1.
Generación distribuida
El término generación distribuida se refiere a centros de generación que se encuentran diseminados a través de la red y que se interconectan directamente con las compañı́as distribuidoras
a niveles de tensión de distribución. Usualmente las potencias generadas no sobrepasan los 10
MW y se encuentran cerca de los puntos de consumo a los que sirven.
El origen de la generación distribuida se encuentra en la cogeneración, es decir, plantas
industriales que generan energı́a para su consumo interno y en el caso de existir un excedente
de energı́a, éste es inyectado a la red. Este modelo es muy común en plantas donde se utiliza
el vapor residual de diferentes procesos para producir la energı́a o en otras donde los desechos
producidos sirven como combustible para los motores utilizados en la generación de energı́a, el
cual es el caso de los ingenios azucareros.
Durante los últimos años la generación distribuida ha ido captando mayor atención ya que
presenta muchos beneficios para las empresas eléctricas. Debido a que los centros de generación
se encuentran cerca de los puntos de consumo existe una reducción de las pérdidas debido a
que la energı́a ya no debe viajar largas distancias desde las grandes centrales generadoras hasta
los puntos donde será consumida. Además, su presencia puede ayudar a palear deficiencias de
generación en momentos de máxima demanda y retrasar inversiones de ampliación de la red de
distribución, ya que ayuda a descongestionar lı́neas que usualmente trabajan bajo sobrecarga.
Existen muchos tipos de tecnologı́a que pueden ser utilizadas dentro de la generación distribuida y actualmente hay grandes esfuerzos en el desarrollo de tecnologı́as que utilicen fuentes
renovables para la producción de energı́a, ya que de esta manera además de brindar los beneficios antes mencionados también ayudan la disminución de la producción de gases de efecto
invernadero.
2.7.2.
Almacenamiento de energı́a
Los sistemas de almacenamiento de energı́a tal como su nombre lo indica tienen la función
de almacenar energı́a eléctrica para utilizarla en el momento que ésta sea requerida.
Existen diferentes tecnologı́as utilizadas en el almacenamiento de energı́a tales como los
volantes de inercia, baterı́as, condensadores electroquı́micos, centrales de bombeo, centrales de
aire comprimido, etc. La selección de la tecnologı́a a utilizar dependerá de la aplicación para la
cual ha sido escogida.
Las aplicaciones de los sistemas de almacenamiento de energı́a pueden ser divididas en tres
grandes grupos:
Calidad de suministro: la energı́a almacenada es inyectada al sistema en perı́odos muy cortos
de tiempo, durante algunos segundos o menos, y tiene como objetivo garantizar la calidad del
suministro de energı́a eléctrica durante eventos tales como interrupciones cortas de servicio y
19
caı́das de tensión.
Potencia de transición: la energı́a almacenada debe ser suficiente para asegurar el suministro
de la demanda por perı́odos de tiempo que pueden comprender desde segundos hasta minutos.
Su función será garantizar la continuidad del servicio durante la transferencia de una fuente de
alimentación a otra.
Gestión energética: esta aplicación requiere del almacenamiento de grandes cantidades de
energı́a. En los sistemas de energı́a eléctrica debe existir en todo momento un balance entre
generación y demanda; esta condición obliga a que el exceso de generación presente durante
horas de baja demanda sea desaprovechado. Sin embargo, con la ayuda de los sistemas de almacenamiento de energı́a es posible almacenar el exceso de generación para luego inyectar dicha
energı́a a la red durante los picos de demanda, evitando de esta manera recurrir a fuentes de
generación más costosas.
En la actualidad la eficiencia de transformación de las tecnologı́as utilizadas en el almacenamiento de energı́a es todavı́a muy baja, ya que se trata de tecnologı́as que se encuentran aún en
desarrollo. Sin embargo, hay grandes esfuerzos de investigación para lograr que las tecnologı́as
de almacenamiento de energı́a sean más eficientes y económicamente rentables.
20
Capı́tulo 3
OpenDSS
OpenDSS es un software de simulación de sistemas de distribución de energı́a eléctrica,
desarrollado por EPRI (Electric Power Research Institute) desde hace más de 10 años. El resultado de este esfuerzo ha quedado plasmado en un programa de simulación en el dominio de
la frecuencia con las funcionalidades propias de los simuladores comerciales ası́ como nuevas
herramientas que tienen en cuenta futuras necesidades relacionadas con los esfuerzos de modernización de las redes actuales. El programa fue originalmente pensado como una herramienta
para el análisis de la interconexión de generación distribuida, pero su continua evolución ha
llevado al desarrollo de otras funcionalidades que son perfectas por ejemplo para estudios de
eficiencia en el suministro de energı́a y estudios de armónicos.
OpenDSS has sido utilizado para:
Planeación y análisis de redes de distribución
Análisis de circuitos AC polifásicos
Análisis de interconexión de generación distribuida
Simulaciones anuales de generación y carga
Simulaciones de plantas eólicas
Mejoramiento de la eficicienca en redes de distribución
Estudios de armónicos e inter armónicos
Otros
El programa incluye varios modos de solución, tales como:
Flujo de potencia (modo snapshot, modo time)
Análsis de armónicos
21
Análisis dinámico
Cálculo de cortocircuito
Otros
OpenDSS está diseñado para recibir instrucciones en forma de texto permitiendo mayor
flexibilidad al usuario. Puede accederse al programa tanto a través de una aplicación independiente como del COM server. La aplicación independiente cuenta con una interfaz de usuario
básica, aunque completamente funcional, que permite interactuar con el programa; mientras que
el COM server permite conectar el OpenDSS con otros programas tales como Matlab de Mathworks, proporcionando de esa manera una gran capacidad de análisis de la información. La Figura 3.1 muestra como interactúan los diferentes módulos dentro de la estructura de OpenDSS.
Figura 3.1: Estructura OpenDSS
OpenDSS representa los circuitos de distribución a través de ecuaciones de admitancias nodales. Cada elemento del sistema es representado por una matriz de admitancia nodal primitiva.
Cada matriz primitiva es adjuntada a la matriz de admitancias del sistema, luego el sistema de
ecuaciones que representa al sistema es solucionado con la ayuda de algoritmos de matrices dispersas. En lo que respecta a cargas no lineales, OpenDSS modela este comportamiento a través
de fuentes de corriente, a las cuales se hace referencia como corrientes de compensación (Ver
Figura 3.2). De esta manera, la corriente que depende de la parte lineal del modelo incluı́do en
la matriz del sistema es compensada por una fuente externa, para que a través de un proceso
iterativo se obtenga el valor correcto.
22
Figura 3.2: Modelo elementos en OpenDSS
3.1.
OpenDSS como aplicación independiente
La aplicación independiente de OpenDSS es accesada utilizando el archivo OpenDSS.exe,
esto hará que aparezca la interfaz de usuario del programa (Ver Figura 3.3). A través de dicha
interfaz es posible desarrollar los códigos de entrada para controlar al OpenDSS.
Figura 3.3: Interfaz gráfica OpenDSS
3.1.1.
Simulación de caso ejemplo desde la aplicación independiente
Para la simulación del caso ejemplo se utilizará una red que consiste en un alimentador
único radial que parte de un transformador trifásico y que alimenta a distintas cargas puntuales
que se encuentran repartidas a lo largo de dicho alimentador. La Figura 3.4 muestra el esquema
unifilar de la red utilizada en este ejemplo.
Para definir dicho sistema de tal manera que OpenDSS sea capaz de analizarlo y solucionarlo se ha desarrollado el siguiente código, el cual puede ser escrito directamente en una de las
23
Figura 3.4: Esquema unifilar de la red ejemplo
ventanas de la interfaz gráfica o guardarlo como un archivo con extensión .dss. En este caso el
código ha sido guardado en una archivo nombrado master.dss.
Clear
new object=circuit.DSSLLibtestckt
BasekV=115 pu=1.01 ISC3=30000 ISC1=25000
! Parámetros del tipo de lı́nea
new linecode.336matrix nphases=3
more rmatrix=(0.0868455 | 0.0298305 0.0887966 | 0.0288883 0.0298305 0.0868455)
more xmatrix=(0.2025449 | 0.0847210 0.1961452 | 0.0719161 0.0847210 0.2025449)
more cmatrix=(2.74 | -0.70 2.96| -0.34 -0.71 2.74)
more Normamps = 400 Emergamps=600
! Transformador
new transformer.sub phases=3 windings=2 buses=(SourceBus subbus)
more conns=’delta wye’ kvs="115 12.47 "kvas="20000 20000"XHL=7
more NumTaps=21 MaxTap=1.15 MinTap=0.85 tap=1
! Lı́neas
new line.line1
new line.line2
new line.line3
new line.line4
new line.line5
subbus loadbus1 linecode=336matrix length=10
loadbus1 loadbus2 336matrix 10
Loadbus2 loadbus3 336matrix 20
Loadbus3 loadbus4 336matrix 5
Loadbus4 loadbus5 336matrix 10
! Cargas
new load.load1 bus1=loadbus1 phases=3 kv=12.47 kw=1000.0
more pf=0.88 model=1 class=1 conn=delta
new load.load2 bus1=loadbus2 phases=3 kv=12.47 kw=500.0
24
more pf=0.90 model=1 class=1 conn=delta
new load.load3 bus1=loadbus3 phases=3 kv=12.47 kw=200.0 pf=0.88
more model=1 class=1 conn=delta
new load.load4 bus1=loadbus4 phases=3 kv=12.47 kw=1000.0
more pf=0.90 model=1 class=1 conn=delta
new load.load5 bus1=loadbus5 phases=3 kv=12.47 kw=500.0
more pf=0.88 model=1 class=1 conn=delta
! Meters
New EnergyMeter.Feeder Line.line1 1
! Define voltage bases so voltage reports come out in per unit
Set voltagebases="115 12.47 .48"
Calcv
! Coordenadas buses
Buscoords list.dss
El archivo list.dss es utilizado para definir las coordenadas fı́sicas de los diferentes buses que
componen el sistema, de esta manera será posible utilizar algunas de las herramientas gráficas
que posee OpenDSS.
! Coordenadas buses
SourceBus, 900, 1000
Subbus, 1000, 1000
LoadBus1, 11000, 1000
LoadBus2, 21000, 1000
LoadBus3, 41000, 1000
LoadBus4, 46000, 1000
LoadBus5, 56000, 1000
Con el sistema definido en forma tal que puede ser analizado por el programa es posible
realizar los diferentes estudios que OpenDSS es capaz de llevar a cabo. Para el presente ejemplo se realizará un flujo de cargas instantáneo, para lo cual será necesario introducir el siguiente
código en una de las ventanas de la interfaz gráfica.
Compile master.dss
set mode=snapshot
solve
Una vez introducido el código, este deberá ser seleccionado, luego se debe hacer clic derecho sobre él y seleccionar la opción Do. Al realizar esta acción se resolverá el sistema realizan25
do un flujo de carga instantáneo. Cuando el sistema ha sido resuelto es posible generar un gran
número de archivos de salida que contienen información acerca del estado del sistema, además
de otras salidas de tipo gráfico.
OpenDSS genera un archivo de texto en el cual se encuentran las potencias que fluyen a
través de todos los elementos del sistema en forma de componentes simétricas; también presenta información acerca de la potencia de sobrecarga de cada elemento y las pérdidas totales del
sistema. Para generar este archivo se utiliza el comando:
Show Powers
La Figura 3.5 muestra la estructura del archivo de salida generado con el comando Show Powers.
Figura 3.5: Salida comando Show Powers
Las pérdidas de potencia por elemento y totales del sistema también pueden ser accesadas y
descargadas en un archivo de texto utilizando el comando:
Show Losses
La Figura 3.6 muestra la estructura del archivo de salida generado con el comando Show Losses.
OpenDSS permite generar el esquema unifilar de la red de manera que los valores de un
determinado parámetro del sistema se vean reflejados en él; en este caso se genera el esquema
de la red donde el grosor de cada lı́nea representa la potencia que fluye a través de ese segmento
26
Figura 3.6: Salida comando Show Losses
de lı́nea. Debido a que la red de prueba se trata de un alimentador radial resulta obvio que el
grosor de las lı́neas irá disminuyendo a lo largo del alimentador, ya que la potencia que fluye
en cada segmento de lı́nea que compone al alimentador disminuye también. Dicha gráfica se
obtiene al ejecutar el comando:
plot circuit power Max=1000 dots=y labels=n subs=y C1=BLUE (Ver Figura 3.7)
Figura 3.7: Salida comando Plot Circuit Power
3.2.
Acceso a OpenDSS desde Matlab
Tal como se mencionó anteriormente OpenDSS puede ser controlado desde otros paquetes de software tales como Matlab; esto es posible a través del COM Server, el cual ha sido
27
desarrollado como una aplicación DLL.
3.2.1.
COM Server
Antes de trabajar en la interconexión de OpenDSS con Matlab, el COM Server debe ser
registrado en el ambiente Windows. El registro del COM Server se realiza a través de la consola
de comandos de DOS. Primero es necesario ubicarse en el directorio en el cual se encuentran
los archivos de OpenDSS y luego ejecutar el siguiente comando:
Regsvr32 OpenDSSEngine.DLL
Ejecutado este paso ya es posible enlazar OpenDSS con otros paquetes de software.
3.2.2.
Control de OpenDSS desde Matlab
Matlab utiliza su servidor ActiveX integrado para comunicarse con el COM Server de
OpenDSS, de esta manera dicho servidor será la interfaz entre ambos programas (Ver Figura 3.8). La inicialización del COM Server desde Matlab es realizada a través de una función
creada en el espacio de trabajo de Matlab. El código utilizado para crear dicha función es el
siguiente:
function [Start,Obj,Text] = DSSStartup()
Obj = actxserver(’OpenDSSEngine.DSS’);
Start = Obj.Start(0);
Text = Obj.Text;
Figura 3.8: Interconexión Matlab-OpenDSS
Luego que OpenDSS ha sido inicializado es posible enviarle instrucciones utilizando el comando DSS.TextCommand=, el cual debe estar acompañado por una cadena que contenga la
instrucción que OpenDSS debe realizar. A continuación se presenta un ejemplo utilizado para
realizar una simulación simple de un flujo de potencia utilizando OpenDSS pero controlado
desde Matlab:
28
[DSSStartOK, DSSObj, DSSText] = DSSStartup();
DSSText.Command = ’compile master.dss’;
DSSCircuit = DSSObj.ActiveCircuit;
DSSText.Command = ’solve’;
Para el ejemplo presentado el archivo master.dss contiene tanto la definición del sistema a
resolver como las opciones que han sido habilitadas para dicha solución.
A través de Matlab es posible acceder a todas la capacidades de OpenDSS y producir las
mismas salidas que al utilizar la aplicación independiente, también cuenta con comandos especiales que transfieren la información directamente al workspace de Matlab. El siguiente comando genera un archivo que contiene las tensiones simples de cada bus en el sistema:
DSS.TextCommand=’Show Voltages LN’
La Figura 3.9 muestra la estructura del archivo de salida generado con el comando Show Voltages LN.
Figura 3.9: Salida comando Show Voltages LN
OpenDSS posee una función que permite graficar la tensión del sistema en función de la
distancia respecto al bus de origen, para un sistema radial esto permite observar el perfil de
tensión a lo largo del alimentador; el comando utilizado para obtener dicha gráfica es:
DSS.TextCommand=’plot profile phases=all’ (Ver Figura 3.10)
El comando Plot Profile es muy útil para visualizar la caı́da de tensión en un sistema radial
pero puede volverse un poco confuso si se utiliza con redes malladas. Para este caso puede generarse una gráfica en la cual el color asignado a cada elemento del sistema dependerá de su
valor de tensión; ası́ para valores mayores a 1.05 pu se utilizará el color azul, para tensiones
entre 0.95 y 1.05 el color asignado será verde y para tensiones menores a 0.95 se ha escogido el
color rojo. Esta gráfica puede generarse utlizando la secuencia de comandos:
DSS.TextCommand=’Set normvminpu=1.05’
29
Figura 3.10: Salida comando Plot Profile
DSS.TextCommand=’Set emergvminpu=0.95’
DSS.TextCommand=’Plot Circuit Voltage dots=y labels=n C1=BLUE C2=GREEN C3=RED’
La Figura 3.11 muestra la gráfica generada con el comando Plot Circuit Voltage.
Figura 3.11: Salida comando Plot Circuit Voltage
Algunos de los comandos que pueden ser utilizados desde Matlab y que permiten descargar la
información directamente en el workspace son:
DSSCircuit.AllBusVmagPU
30
DSSCircuit.AllElementLosses
DSSCircuit.ActiveElement.Powers
DSSCircuit.ActiveElement.Yprim
DSSCircuit.ActiveElement.seqCurrents
DSSCircuit.AllNodeDistancesByPhase(1)
DSSCircuit.AllBusNames
31
Capı́tulo 4
Localización óptima de generación
distribuida
La introducción de generación distribuida en redes de distribución eléctrica trae consigo
muchos beneficios tales como la reducción de pérdidas, mejora de la calidad del suministro
de energı́a, descongestión de lı́neas, aumento de la confiabilidad del sistema, etc. Debido a su
tamaño relativamente pequeño los generadores distribuidos pueden ser instalados fácilmente
en casi cualquier punto de la red, siendo posible llevarlos a lugares cercanos a los centros de
consumo. Sin embargo, la selección incorrecta de su ubicación puede tener consecuencias como
el aumento de pérdidas del sistema, problemas de tensión, sobrecarga de lı́neas y otras; éstas
representan el efecto contrario de lo que se espera lograr con la introducción de generación
distribuida. Por esta razón es necesario analizar y cuantificar el impacto real que la generación
distribuida puede tener en una determinada red.
Los diferentes métodos de localización óptima de un generador distribuido tienen como
objetivo maximizar uno o varios de los siguientes parámetros:
La reducción de pérdidas en el sistema
La mejora del perfil de tensión
La mejora de los ı́ndices de confiabilidad del sistema
La reducción de los costes de operación
La reducción de emisión de gases de efecto invernadero
Otros
Los métodos que buscan optimizar más de un parámetro utilizan funciones multi-objetivo, las
cuales evalúan la mejora de las condiciones del sistema asignando un factor de peso a cada
parámetro. De esta forma es posible alcanzar un balance entre los beneficios que se desean
obtener a partir de la introducción de generación distribuida, ya que en muchas ocasiones no
resulta posible maximizar todos los parámetros considerados.
32
4.1.
Métodos de localización óptima de generación distribuida
En los últimos años se ha realizado un gran esfuerzo dentro del sector eléctrico por desarrollar métodos que permitan determinar la ubicación óptima de generadores distribuidos dentro
una red de distribución. Se trata de un problema de optimización multi-objetivo con múltiples
restricciones, para el que se han desarrollado un elevado número de métodos, entre las cuales
merecen especial mención:
Regla de los 2/3
Métodos analı́ticos
Flujo de carga óptimo
Algoritmos genéticos
Algoritmos metaheurı́sticos
4.1.1.
Regla de los 2/3
La regla de los 2/3 es un método derivado de la conocida regla de los 2/3 para la ubicación
de bancos de condensadores. Según esta regla para minimizar las pérdidas en un alimentador
radial con carga uniformemente distribuida debe de instalarse un generador con una potencia
igual a 2/3 de la carga activa total del sistema a una distancia de 2/3 de la longitud total del
alimentador. A pesar de que esta regla ha sido deducida a partir de algunas simplificaciones en
el cálculo, su resultado brinda una muy buena aproximación para escoger tanto la capacidad
como la ubicación de un generador distribuido. Sin embargo, debe de tenerse en cuenta que
dicha regla solo es válida para un alimentador radial con carga uniformemente distribuida, por
lo que posee muy poca aplicación práctica.
4.1.2.
Métodos analı́ticos
Los métodos analı́ticos tienen como objetivo común la reducción de pérdidas, para lograr
este objetivo se basan en análisis y cálculos matemáticos. Como estrategia general se desarrollan ecuaciones que definen las pérdidas del sistema en función de la potencia y ubicación del
generador distribuido; luego encontrando el mı́nimo de dicha ecuación es posible determinar
la ubicación y capacidad óptima para el generador distribuido. Dichos métodos pueden ser utilizados tanto para redes radiales como malladas. Entre sus ventajas es posible mencionar que
son relativamente fáciles de utilizar, proveen resultados rápidamente y no requieren de procesos iterativos; mientras que entre sus desventajas se encuentran que pueden entregar soluciones
erróneas para sistemas reales y algunos de ellos solo son capaces de optimizar la ubicación
33
Tı́tulo artı́culo
Analytical approaches for optimal
placement of distributed generation
in power systems
An analytical approach for DG allocation
in primary distribution networks
An analytical method for the sizing and
siting of distributed generator in radial
systems
Optimal placement of wind turbine DG
in primary distribution systems for real
loss reduction
Optimal DG unit placement for loss
reduction in radial distribution system-A
case study
Autores
C. Wang
M. H. Nehrir
N. Acharya
P. Mahat
N. Mithulananthan
T. Gözel
M.H. Hocaoglu
P. Mahat
W. Ongsakul
N. Mithulananthan
A.L. Devi
B. Subramanyam
Año de
publicación
2004
2006
2009
2006
2007
Tabla 4.1: Métodos analı́ticos
pero no el tamaño del generador. La Tabla 4.1 presenta artı́culos que han sido desarrollados
utilizando métodos analı́ticos para la localización óptima de generadores distribuidos.
A continuación se presenta un resumen del método desarrollado por C. Wang y colaboradores en su artı́culo Analytical approaches for optimal placement of distributed generation in
power systems.
Métodos analı́ticos para la localización óptima de generación distribuida en sistemas eléctricos de potencia
Este método es utilizado para determinar la ubicación óptima de un generador distribuido
de una potencia conocida en un alimentador radial y utiliza las siguientes simplificaciones:
Los parámetros de las lı́neas se encuentran uniformemente distribuidos y se consideran
únicamente los parámetros de resistencia e inductancia.
Las carga se encuentra distribuida a lo largo del lı́nea y posse un densidad de corriente
Id(x)
En primera instancia se define
Z x
I(x) =
Id(x)dx
(4.1)
0
Z = R + jX (Ω/Km)
34
(4.2)
x: Distancia respecto al final de la lı́nea
A partir de las ecuaciones anteriores es posible calcular las pérdidas totales del sistema y la
caı́da de tensión
2
Z u Z x
Ploss =
Id(x)dx .Rdx
(4.3)
0
0
Z xZ x
Vdrop (x) =
(4.4)
Id(x)dx.Zdx
0
0
u: Distancia total de la lı́nea
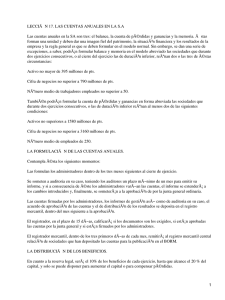
La Figura 4.1 muestra el perfil de corriente en un alimentador radial de longitud l con una
densidad de corriente arbitraria Id(x).
Figura 4.1: Alimentador con carga distribuida
Si un generador distribuido es agregado al sistema, y dicho generador se encuentra ubicado
a una distancia x0 del extremo final de la lı́nea e inyecta una corriente Idg, la distribución de
corriente a lo largo de la lı́nea se define como:
Z x
I(x) =
0 ≤ x ≤ x0
Id(x)dx
Z 0x
Idx(x) − Idg
(4.5)
x0 ≤ x ≤ u
0
Las pérdidas del sistema y la caı́da de tensión deben ser calculadas de nuevo luego de haber
introducido al generador distribuido.
2
2
Z x0 Z x
Z u Z x
.Rdx
Ploss =
Id(x)dx
.Rdx
+
Id(x)dx
−
Idg
(4.6)
0
0
Z xZ x
Vdrop (x) =
x0
0
0 ≤ x ≤ x0
Z x Z x
Id(x)dx.Zdx +
Id(x)dx − Idg Zdx
(4.7)
Id(x)dx.Zdx
0 0
Z x0 Z x
0
0
0
x0
35
x0 ≤ x ≤ u
Debido a que el método está orientado a la reducción de pérdidas totales del sistema se
deberá de cumplir la condición impuesta por la siguiente ecuación para lograr dicho objetivo:
d
d
Ploss =
Ploss = 0
dx0
dIdg
(4.8)
Luego de encontrar la posición x0 que reduce a un mı́nimo las pérdidas se deberá calcular
la caı́da de tensión a través de la lı́nea para asegurar que el sistema se encuentra dentro de
condiciones de operación aceptables.
4.1.3.
Flujo de carga óptimo
Un flujo de carga óptimo puede ser descrito como un problema de programación no lineal,
en el cual la solución óptima para la función objetivo es calculada considerando las restricciones
del sistema. Los métodos basados en flujos de carga óptimos tienen en cuenta aspectos tanto
técnicos como económicos, por lo que su objetivo será encontrar la ubicación del generador
distribuido para la cual se cumplan objetivos tales como maximizar la ganancia y el beneficio
social, reducir las pérdidas del sistema, entre otros, tomando en cuenta restricciones también de
carácter técnico y económico. Entre las ventajas de estos métodos se puede mencionar que son
capaces de trabajar con sistemas grandes y complejos, pueden resolver problemas que incluyen
muchas variables y son relativamente rápidos. Respecto a los problemas encontrados al trabajar
con dichos métodos se puede mencionar que tienen problemas para encontrar la solución óptima
si la función objetivo es muy compleja, pueden volverse computacionalmente menos eficientes
al aumentar la cantidad de elementos, algunos métodos únicamente son capaces de optimizar
la ubicación pero no el tamaño del generador distribuido, etc. La Tabla 4.2 presenta artı́culos
que han sido desarrollados utilizando el flujo de carga óptimo para la localización óptima de
generadores distribuidos.
A continuación se presenta un resumen del método desarrollado por W. Rosehart y colaboradores en su artı́culo Optimal placement of distributed generation.
Localización óptima de generación distribuida
En el método presentado se plantea una técnica para determinar la ubicación óptima de un
generador distribuido teniendo como objetivo la reducción del costo de la electricidad. Para alcanzar dicho objetivo el método realiza un flujo de carga óptimo basado en multiplicadores de
Lagrange.
Se define la función objetivo
G (x p , ρ, λ p , λ∗ ) =
∑ CiPi
i∈η
C: Precio de oferta de la energı́a
P: Potencia programada
36
(4.9)
Año de
Tı́tulo artı́culo
Autores
publicación
Optimal placement of distributed
W. Rosehart
2002
generation
E. Nowicki
Optimal sizing and placement of
S. Ghosh
2010
distributed generation in a network
S.P. Ghoshal
system
Optimal DG placement in deregulated
D. Gautam
2007
electricity market
N. Mithulananthan
Dispersed generation planning using
J.O. Kim
1998
improved Hereford Ranch algorithm
S.W. Nam
S.K Park
C. Singh
Tabla 4.2: Métodos flujo de carga óptimo
Las ecuaciones que rigen las restricciones de la solución son establecidas
F (x p , ρ, λ p ) = 0
HT (x p , ρ) ≤ HT
HB ≤ HB (x p , ρ)
HB (x p , ρ) ≤ HB
HR (x p , ρ) ≤ HR
xp ≤ xp ≤ xp
ρ ≤ρ ≤ρ
(Ecuaciones de f lu jo de potencia)
(4.10)
Límites de las l íneas de transmisión
Límite in f erior de o f erta de generador
Límite superior de o f erta de generador
(Margen de reserva de potencia activa)
Límites de las variables dependientes
Límites de las variables independientes
A continuación con la ayuda de un software de optimización se procede a calcular los multiplicadores de Lagrange (λ ) asociados con las ecuaciones de flujo de potencia activos para
cada bus del sistema, siendo los buses más adecuados para la instalación de generación distribuida aquellos que presenten multiplicadores de Lagrange de mayor valor. La instalación de
generación distribuida en dichos buses conducirá a una reducción en el costo de la electricidad.
4.1.4.
Algoritmos genéticos
Los algoritmos genéticos son un método de optimización basado en la aplicación de la
selección natural y la genética. En este tipo de métodos se crea una población inicial cuyas caracterı́sticas son definidas aleatoriamente y que es evaluada en función de su idoneidad, la cual
es determinada en base a los parámetros que se desean optimizar. A partir de esta primera evaluación se seleccionan los individuos más idóneos y una nueva población es creada utilizando
dichos individuos como base. Este proceso se repite hasta que la solución óptima es alcanzada.
37
Los métodos basados en algoritmos genéticos poseen ventajas tales como robustez, la posibilidad de explorar todas las soluciones posibles al problema, la capacidad de trabajar con variables
discretas y continuas, entre otras. Sin embargo presentan desventajas como un tiempo excesivo de convergencia, falta de precisión cuando se require una respuesta de alta calidad, etc. La
Tabla 4.3 presenta artı́culos que han sido desarrollados utilizando algoritmos genéticos para la
localización óptima de generadores distribuidos.
Año de
Autores
publicación
N. Mithulananthan
2004
T. Oo
L.V. Ohu
G. Celli
2005
E. Ghiani
S. Mocci
F. Pilo
Optimal distributed generation allocation
C.L.T. Borges
2006
for reliability, losses, and voltage
D.M. Falcao
improvement
Risk-based distributed generation
M.R. Haghifam
2008
placement
H. Falaghi
O.P. Malik
Maximal optimal benefits of distributed A.A. Abou El-Ela
2010
generation using genetic algorithms
S.M. Allam
M. Shatla
Tı́tulo artı́culo
Distributed generator placement in
power distribution system using genetic
algorithm to reduce losses
A multiobjective evolutionary algorithm
for the sizing and siting of distributed
generation
Tabla 4.3: Métodos algoritmos genéticos
A continuación se presenta un resumen del método desarrollado por N. Mithulananthan
y colaboradores en su artı́culo Distributed generator placement in power distribution system
using genetic algorithm to reduce losses.
Localización de generadores distribuidos en sistemas de distribución de energı́a utilizando
algoritmos genéticos para la reducción de pérdidas
El método consiste en determinar con ayuda de algoritmos genéticos el tamaño y la ubicación óptima de un generador distribuido para reducir las pérdidas totales del sistema. La función
utilizada para evaluar la idoneidad de cada individuo de la población generado será las pérdidas del sistema, las cuales son calculadas luego de resolver las ecuaciones de flujo de cargas
utilizando el método de Newton-Raphson utilizando las siguientes fórmulas:
Ploss = PT [B] P + BT0 P + B00
38
(4.11)
n
Ploss = ∑
n
n
∑ PiBi j Pj + ∑ PiBi0 + B00
i=1 j=1
(4.12)
i=1
Bi j : Matriz de dimensión nxn
Bi0 : Vector adimensional con coeficientes lineares de pérdidas
B00 : Coeficientes de pérdidas constantes
La inicialización de la población, evaluación de su idoneidad y creación de nuevas poblaciones puede ser realizada a través del GA Optimization Toolbox (GAOT) de Matlab.
EL uso de algoritmos genéticos para determinar la ubicación óptima de un generador distribuido puede resumirse en 6 pasos:
1. Representación: Se define como el problema está estructurado en el algoritmo genético
y se determinan los operadores que serán utilizados.
2. Inicialización de la población: Una población inicial es creada cuyas caracterı́sticas son
determinadas aleatoriamente.
3. Selección: Se realiza una selección de los individuos utilizando una función geométrica
normalizada.
4. Reproducción: Se crea una nueva población a partir de la anterior.
5. Evaluación de la idoneidad: Las pérdidas totales del sistema son utilizadas para evaluar
la idoneidad de cada individuo de la población.
6. Terminación: La simulación termina cuando se ha creado un número determinado de
generaciones de individuos.
La Figura 4.2 muestra el diagrama de flujo que representa al algoritmo de solución.
El tamaño y ubicación óptimos para el generador distribuido serán aquellos que correspondan al individuo que sea considerado como el más idóneo al terminar la simulación.
4.1.5.
Algoritmos metaheurı́sticos
Los algoritmos metaheurı́sticos son algoritmos aproximados de optimización; son procedimientos iterativos que combinan distintos conceptos para explorar y explotar adecuadamente
el espacio de búsqueda. Estos algoritmos son capaces de manejar funciones multi-objetivo,
además de ser intuitivos, relativamente fáciles de entender e implementar y eficaces al encontrar soluciones cercanas al óptimo real, lo cual también representa una desventaja ya que no
siempre es posible encontrar soluciones exactas; otra desventaja radica en que algunos algoritmos solo son capaces de encontrar soluciones en sistemas que no presentan restricciones.
Existen diferentes algoritmos que utilizan conceptos metaheurı́sticos tales como Optimización
basada en colonias de hormigas, Búsqueda tabú, Búsqueda local, Optimización de enjambre
de partı́culas, entre otros. Debido a que los algoritmos metaheurı́sticos son capaces de trabajar
39
Figura 4.2: Flujograma GAOT
con funciones multi-objetivo pueden ser utilizados para determinar la localización óptima de un
generador distribuido optimizando distintos parámetros del sistema, ya sean de carácter técnico
o económico. La Tabla 4.4 presenta artı́culos que han sido desarrollados utilizando algoritmos
metaheurı́sticos para la localización óptima de generadores distribuidos.
A continuación se presenta un resumen del método desarrollado por K. Nara y colaboradores
en su artı́culo Application of tabu search to optimal placement of distributed generators.
Uso de la búsqueda tabú para la localización óptima de generadores distribuidos
El método presentado utiliza la búsqueda tabú para determinar la potencia y posición óptima
de un grupo de generadores distribuidos con el objetivo de minimizar las pérdidas del sistema,
habiendo definido previamente el número de generadores y la potencia total de los mismos. El
método considera las siguientes suposiciones:
La carga de cada segmento del sistema se encuentra uniformemente distribuida, es balanceada y utiliza el modelo de corriente constante.
El factor de potencia de la carga es igual a la unidad.
Las posibles ubicaciones para los generadores han sido definidas previamente.
40
Año de
Autores
publicación
T. Griffin
2001
K. Tomsovic
D. Secrest
A. Law
An integrated distributed generation
W. El-Khattam
2005
optimization model for distribution
Y.G. Hegazy
system planning
M.M.A. Salama
Application of tabu search to optimal
K. Nara
2001
placement of dispersed generators
Y. Hayashi
K. Ikeda
T. Ashizawa
Siting and sizing of distributed generation
A.J. Ardakani
2007
for loss reduction
A.K. Kavyani
S.A. Pourmousavi
Optimal operation of distribution system
T. Niknam
2005
with regard to distributed generation:
A.M. Ranjbar
A comparison of evolutionary methods
A.R. Shirani
B. Mozafari
A. Ostadi
Tı́tulo artı́culo
Placement of dispersed generation
systems for reduced losses
Tabla 4.4: Métodos algoritmos metaheurı́sticos
La potencia de cada generador debe ser seleccionada de un grupo de valores escogidos de
antemano (valores discretos).
Únicamente puede asignarse un generador a cada ubicación posible.
El número máximo de unidades generadoras es conocido.
La potencia total del grupo de generadores es conocida.
La función objetivo a minimizar será:
tmax SC
Z=
(t)
∑ ∑ Lossh
t=1 h=1
(t)
IDG jk =
N
(t)
IDG jk
(t)
(k)
∑ B jkgn jk
g=1
( j = 1, 2, . . . , SC, k = 1, 2, . . . , M,t = 1, 2, . . . ,tmax )
41
(4.13)
(4.14)
Las restricciones para el problema son definidas a través de ecuaciones.
Potencia total del grupo de generadores:
SC M
N
(g)
∑ ∑ ∑ Cgn jk
≤G
(4.15)
j=1 k=1 g=1
Número máximo de unidades generadoras:
SC M
N
(g)
∑ ∑ ∑ n jk
≤H
(4.16)
j=1 k=1 g=1
Una unidad por ubicación posible:
N
(g)
∑ n jk
≤1
(4.17)
g=1
( j = 1, 2, . . . , SC, k = 1, 2, . . . , M)
Condiciones de operación de generadores:
(t)
B jkg ≤ Cg
(4.18)
( j = 1, 2, . . . , SC, k = 1, 2, . . . , M,t = 1, 2, . . . ,tmax )
(t)
f B jkg ,Cg ≤ 0
(4.19)
( j = 1, 2, . . . , SC, k = 1, 2, . . . , M,t = 1, 2, . . . ,tmax )
(t)
Lossh : Pérdidas en la sección h para el tiempo t.
(t)
IDG jk : Corriente inyectada por el generador en la k-ésima posición en la sección j para el tiempo
t.
(g)
n jk : Variable booleana utilizada para determinar si un generador de g-ésima potencia es asignado a la k-ésima ubicación en la sección j.
SC: Número total de secciones.
N: Número total de valores posibles de potencia para los generadores.
M: Número total de ubicaciones posibles para cada sección.
tmax : Valor máximo para el tiempo t.
Cg : Potencia del g-ésimo generador (valor discreto).
H: Número máximo de generadores instalables.
G: Potencia máxima del grupo de generadores.
(t)
B jkg : Potencia inyectada por el generador de la g-ésima potencia instalado en la k-ésima posición de la sección j para el tiempo t.
Por simplicidad se asume que cada generador inyectará su potencia nominal en todo momento:
(t)
B jkg = Cg
(4.20)
42
Luego de incluir la simplificación que dicta que cada generador inyectará su potencia nomi(t)
nal en todo momento es posible obtener los valores de IDG jk al discretizar los valores encontrados al resolver la siguientes ecuaciones simultáneas:
)
(
tmax SC
(t)
(t)
(t)
(4.21)
/∂ IDG jk = 0
∂ ∑ ∑ Lossh IDG jk
t=1 h=1
(( j, k) ∈ Q)
Q: Grupo de valores de (j,k) a los cuales hay un generador conectado.
Para obtener la solución al problema planteado se utiliza un algoritmo el cual como primer paso determina posiciones para todos los generadores a analizar utilizando la búsqueda
tabú; para dichas posiciones se determinan, utilizando nuevamente la búsqueda tabú, las potencias de los generadores que minimizarán las pérdidas del sistema. A continuación el algoritmo
definirá nuevas posiciones que se encuentran en la “vecindad” de las posiciones originales y
calculará las potencias de los generadores que reducen al máximo las pérdidas, ası́ hasta haber
analizado los alrededores de dichas posiciones originales. Luego se definirán nuevas posiciones o una nueva “vecindad” repitiendo el proceso hasta que el número máximo de iteraciones
consideradas haya sido alcanzado. Al final del análisis de cada “vecindad” se determinará cual
es la solución óptima según la evaluación de la función objetivo (las pérdidas del sistema); de
la misma manera al alcanzar el número máximo de iteraciones se escogerá la solución óptima
utilizando el mismo criterio. La Figura 4.3 muestra el diagrama de flujo que representa al algoritmo de solución. Debe de tomarse en cuenta que los valores de potencias asignadas a los
generadores solo pueden tomar valores discretos definidos al comienzo del problema, por lo que
los valores de potencias encontrados utilizando la búsqueda tabú deben de ser discretizados para
ajustarse a dichos valores. Con el objetivo de evitar crear “vecindades” que han sido analizadas
anteriormente se hace uso de la lista tabú, en la cual se lleva el registro de las “vecindades”
creadas y un clasificación según la idoenidad de la solución óptima encontrada para la misma,
de esta manera el algoritmo se vuelve más eficiente.
43
Figura 4.3: Flujograma del algoritmo de solución
44
Capı́tulo 5
Localización óptima de un generador
distribuido utilizando el método de Monte
Carlo
El estudio desarrollado en este trabajo está basado en el método de Monte Carlo, y busca
optimizar tanto la ubicación como la potencia de un generador distribuido, el cual inyecta únicamente potencia activa con el objetivo de minimizar las pérdidas del sistema. La idea detrás
de este método consiste en generar aleatoriamente valores para la posición y la potencia del
generador distribuido, resolver el sistema y calcular las pérdidas totales para cada caso. Con el
análisis de un número determinado de casos serı́a posible, utilizando algoritmos de interpolación multivariable, encontrar la combinación de posición y potencia que reduzca las pérdidas
a un mı́nimo. Se deberı́a generar un número suficiente de pares posición-potencia para que las
conclusiones obtenidas fueran realistas. Una de las ventajas del método desarrollado es la utilización de OpenDSS como herramienta de simulación; lo que permite no solo realizar estudios
tipo snapshot sino también estudios que utilicen curvas de carga que varı́an con el tiempo, permitiendo de esta forma optimizar la potencia y la ubicación del generador para que las pérdidas
totales de energı́a a lo largo de un periodo de tiempo sean mı́nimas. Los estudios que utilizan
curvas de carga que varı́an a lo largo del tiempo presentan un mayor valor que aquellos que
solo consideran cargas constantes, ya que resulta obvio que en los sistemas reales las cargas
presentan un comportamiento variable en el tiempo. Por otro lado, el post-procesamiento de la
información generada por OpenDSS permite descartar casos que no cumplan con restricciones
de carácter técnico. El procedimiento seguido por el método es el siguiente:
1. Se generan valores aleatorios de posición y potencia para el generador, asignándole además
una curva de carga al mismo.
2. Se calcula el flujo de cargas para cada caso. Se descartan aquellos casos que no cumplan
con alguna de las siguientes restricciones:
La tensión en al menos un bus se encuentra fuera de los lı́mites aceptables
45
Uno o más elementos del sistema trabajan por encima de su capacidad nominal.
Adicionalmente puede considerarse la no presencia de flujo inverso como una condición
que debe ser cumplida en todo momento.
3. Se termina el proceso al alcanzar un número determinado de simulaciones.
4. Se crean los archivos personalizados para el post-procesamiento de la información.
5. Se generan curvas basadas en la información obtenida de los archivos personalizados, y
se determinan los valores óptimos de posición y potencia.
5.1.
Implementación del método
Para implementar el presente método se ha decidido utilizar Matlab para generar las variables aleatorias, controlar a OpenDSS (encargado de realizar las simulaciones), recopilar la
información acerca del sistema de energı́a eléctrica (tensiones, pérdidas, sobrecargas, etc.) y
generar archivos personalizados de salida. La Figura 5.1 muestra un esquema del diagrama de
bloques del proceso implementado. Las curvas de carga correspondientes al generador distribuido serı́an generadas utilizando herramientas de software externas a Matlab y OpenDSS, al
igual que la generación de gráficos y algoritmos de interpolación.
Figura 5.1: Diagrama de bloques del proceso
46
5.1.1.
Entrada de datos
Se requiere de cierta información de entrada para poder desarrollar el método, dicha información puede dividirse en:
Información técnica del sistema bajo estudio
Determinación de curvas de carga
Generación aleatoria de los valores de potencia y posición del generador distribuido
Información técnica del sistema bajo estudio
Ver sección Red de estudio
Determinación de curvas de carga
Debido a que el estudio contempla el uso de curvas de carga que varı́an en el tiempo es
necesario definir las curvas que serán asignadas tanto a las cargas como al generador distribuido.
Las curvas utilizadas en el presente estudio han sido obtenidas a partir del software HOMER
de NREL. Para el caso particular del generador distribuido se ha optado por utilizar una curva
de carga que corresponde a un generador fotovoltaico con factor de potencia igual a la unidad;
además se ha asumido que no existe mayor variación de la radiación solar en el área cubierta por
el sistema bajo prueba, por lo tanto es posible utilizar la misma curva de carga para cualquier
ubicación del generador. Las Figuras 5.2 y 5.3 muestran las curvas de carga utilizadas para las
demandas y para los generadores distribuidos respectivamente.
Generación aleatoria de los valores de potencia y posición del generador distribuido
Para la generación de los valores de potencia y posición del generador distribuido se ha utilizado una distribución aleatoria uniforme. Dicha acción ha sido implementada en Matlab de tal
manera que la potencia puede tomar un valor máximo igual al valor nominal de la carga activa
instalada en el sistema y un valor mı́nimo de una centésima del mismo; mientras que la ubicación es determinada asignando un número entero que es relacionado con el ı́ndice asignado a
cada bus del sistema.
Código utilizado para generar los valores de potencia y posición del generador distribuido:
%Generación de valores de potencia e ı́ndice para bus de prueba
P=random(’unif’,PL/100,PL,[N,1]);
b=random(’unif’,3,nb,[N,1]);
bb=round(b);
N: Número de casos de prueba
PL: Valor nominal de la carga instalada en el sistema
47
Figura 5.2: Curvas de carga asignadas a las demandas
Figura 5.3: Curva para generador fotovoltaico
48
bb: Número entero utilizado como ı́ndice
La Figura 5.4 muestra la distribución de los pares de potencia e ı́ndice de bus de prueba para
1000 casos.
Figura 5.4: Combinaciones Potencia-Indice bus para 1000 casos
5.1.2.
Simulación
La simulación de cada caso de prueba será llevada a cabo por OpenDSS y será inicializada
desde Matlab. Los pasos a seguir para desarrollar la simulación son:
1. Se compila el archivo con la información del sistema.
2. Se incluye al generador distribuido en el sistema, utilizando los parámetros determinados aleatoriamente. Esta acción se realiza desde Matlab, ya que dicho generador no se
encuentra definido en el archivo base.
3. Se ejecuta el comando Solve.
4. Se recopila información del sistema.
5. Se termina la simulación cuando se ha alcanzado la cantidad definida de casos.
49
5.1.3.
Salida de datos
Al término de la simulación se crearán archivos personalizados con la información recopilada de cada caso. La información contenida en dichos archivos será utilizada para alcanzar los
siguientes objetivos:
Generar gráficas que permitan observar la variación de las pérdidas totales del sistema
con respecto a la potencia y la ubicación del generador distribuido.
Determinar los valores de potencia y ubicación del generador distribuido que minimicen
las pérdidas totales del sistema.
Ambos objetivos serán alcanzados utilizando el software TableCurve3D, el cual nos permite
generar superficies utilizando la información generada a partir de las simulaciones, adicionalmente cuenta con algoritmos que permiten encontrar el punto mı́nimo de dicha superficie. Dicha
caracterı́stica será la que nos permita encontrar la combinación potencia-ubicación óptima para
el generador distribuido.
5.2.
Red de estudio
La red de potencia utilizada en este estudio consiste en un alimentador único que parte de
un transformador trifásico, y que está formado por tramos de lı́nea uniformemente espaciados,
encontrándose una carga puntual al final de cada tramo; todas las cargas que se encuentran a
lo largo del alimentador son idénticas. De esta forma el circuito aproximadamente se comporta
como una red con carga uniformemente distribuida. La Figura 5.5 muestra el esquema unifilar
de la red estudiada en este trabajo.
Figura 5.5: Esquema unifilar de la red radial con carga distribuida
5.2.1.
Transformador
El transformador que alimenta al sistema se trata de un transformador trifásico que permite
reducir la tensión proveniente del sistema aguas arriba del alimentador al nivel de tensión reque50
rido por las cargas. La Tabla 5.1 presenta las caracterı́sticas más importantes del transformador
utilizado en este trabajo.
kVA kV-high
20000 115 D
kV-low XHL %
12.47 Y
7
Tabla 5.1: Parámetros del transformador
5.2.2.
Definición de las lı́neas
Debido a que se trata de un sistema radial, éste utiliza un único tipo de lı́nea, es decir, la
disposición geométrica y capacidad es la misma en todo el alimentador. El alimentador tiene
una longitud total de 10000 pies. Las caracterı́sticas de las lı́neas se presentan en la Tabla 5.2.
Conductor
336 MCM ACSR
Capacidad
(A)
Long (pie)
400
100
Número total
de tramos
100
Tabla 5.2: Información de lı́neas
5.2.3.
Cargas del sistema
Las cargas definidas para el presente sistema se encuentran ubicadas a lo largo del alimentador, todas ellas son cargas trifásicas, balanceadas y se encuentran concentradas al final de cada
tramo de lı́nea. El sistema tiene una carga total de 7.5 MW y 3.63 Mvar. La Tabla 5.3 presenta
las caracterı́sticas principales de las cargas del sistema.
kW
75
kvar PF
36.3 0.90
Conexión
Y
Tabla 5.3: Cargas de la red
Las curvas de carga utilizadas han sido definidas como: Dload1, Dload2, Dload3 y Dload4.
La Tabla 5.4 muestra la asignación de las curvas de carga a las distintas demandas del sistema.
5.2.4.
Definición del sistema en OpenDSS
Archivo principal UbGD2.dss
Clear
new object=circuit.DSSLLibtestckt
51
Carga
Load1
Load2
Load3
Load4
Load5
Load6
Load7
Load8
Load9
Load10
Load11
Load12
Load13
Load14
Load15
Load16
Load17
Load18
Load19
Load20
Load21
Load22
Load23
Load24
Load25
Load26
Load27
Load28
Load29
Load30
Load31
Load32
Load33
Load34
Load35
Curva
Dload1
Dload1
Dload3
Dload1
Dload4
Dload1
Dload2
Dload4
Dload2
Dload3
Dload3
Dload2
Dload2
Dload4
Dload2
Dload1
Dload4
Dload3
Dload3
Dload2
Dload3
Dload1
Dload4
Dload2
Dload1
Dload4
Dload3
Dload1
Dload3
Dload2
Dload4
Dload2
Dload1
Dload4
Dload2
Carga
Load36
Load37
Load38
Load39
Load40
Load41
Load42
Load43
Load44
Load45
Load46
Load47
Load48
Load49
Load50
Load51
Load52
Load53
Load54
Load55
Load56
Load57
Load58
Load59
Load60
Load61
Load62
Load63
Load64
Load65
Load66
Load67
Load68
Load69
Load70
Curva
Dload3
Dload3
Dload4
Dload2
Dload1
Dload2
Dload1
Dload1
Dload4
Dload1
Dload3
Dload2
Dload4
Dload2
Dload2
Dload2
Dload1
Dload3
Dload4
Dload2
Dload3
Dload1
Dload4
Dload4
Dload4
Dload3
Dload2
Dload3
Dload1
Dload2
Dload1
Dload4
Dload3
Dload3
Dload4
Carga
Load71
Load72
Load73
Load74
Load75
Load76
Load77
Load78
Load79
Load80
Load81
Load82
Load83
Load84
Load85
Load86
Load87
Load88
Load89
Load90
Load91
Load92
Load93
Load94
Load95
Load96
Load97
Load98
Load99
Load100
Curva
Dload1
Dload2
Dload1
Dload2
Dload3
Dload4
Dload1
Dload2
Dload3
Dload1
Dload2
Dload1
Dload4
Dload4
Dload2
Dload4
Dload3
Dload3
Dload1
Dload2
Dload2
Dload1
Dload4
Dload4
Dload3
Dload2
Dload1
Dload3
Dload2
Dload4
Tabla 5.4: Asignación de curvas de carga a las demandas del sistema
52
more BasekV=115 pu=1.01 ISC3=30000 ISC1=25000
!
more
more
more
more
Define line code new linecode.336matrix nphases=3
rmatrix=(0.0868455 0.0298305 0.0887966 0.0288883 0.0298305 0.0868455)
xmatrix=(0.2025449 0.0847210 0.1961452 0.0719161 0.0847210 0.2025449)
cmatrix=(2.74 -0.70 2.96 -0.34 -0.71 2.74)
Normamps=400 Emergamps=600
! Define loadshapes
New LoadShape.Dload1 npts=8760 interval=1.0
more mult=(File=Dload1.csv) action=normalize
New LoadShape.Dload2 npts=8760 interval=1.0
more mult=(File=Dload2.csv) action=normalize
New LoadShape.Dload3 npts=8760 interval=1.0
more mult=(File=Dload3.csv) action=normalize
New LoadShape.Dload4 npts=8760 interval=1.0
more mult=(File=Dload4.csv) action=normalize
New LoadShape.wind1 npts=8760 interval=1.0
more mult=(File=dwind1.csv) action=normalize
New LoadShape.LSGY npts=8760 interval=1.0
more mult=(File=dsun1.csv) action=normalize
! Substation transformer
new transformer.sub phases=3 windings=2 buses=(SourceBus subbus)
more conns=’delta wye’ kvs="115 12.47 "kvas="20000 20000"XHL=7
more NumTaps=21 MaxTap=1.15 MinTap=0.85 tap=1
! define the lines
Redirect lineas.dss
! define the loads
Redirect cargas2.dss
!Energy meter
New EnergyMeter.Feeder element=transformer.sub terminal=1 Losses=yes
! Define voltage bases
Set voltagebases="115 12.47 .48"
Calcv
Buscoords listabuses.csv
53
! Define Options
set casename=UbGD2
set Maxiterations=20
set mode=yearly number=8760 stepsize=1h
set MaxControlIter=30
Set overloadreport=true
Set voltexcept=true
set demand=true
set DIVerbose=true
Archivo lineas.dss
! System lines
new line.line1 subbus bus1 linecode=336matrix length=0.1
new line.line2 bus1 bus2 like=line1
new line.line3 bus2 bus3 like=line1
new line.line4 bus3 bus4 like=line1
new line.line5 bus4 bus5 like=line1
new line.line6 bus5 bus6 like=line1
new line.line7 bus6 bus7 like=line1
.
.
.
new line.line100 bus99 bus100 like=line1
Archivo cargas2.dss
! System loads
new load.load1 bus1=bus1 phases=3 kv=12.47 kw=75.0 pf=0.90
more model=1 daily=day yearly=Dload1 class=1 conn=wye
new load.load2 bus1=bus2 like=load1 yearly=Dload1
new load.load3 bus1=bus3 like=load1 yearly=Dload3
new load.load4 bus1=bus4 like=load1 yearly=Dload1
new load.load5 bus1=bus5 like=load1 yearly=Dload4
new load.load6 bus1=bus6 like=load1 yearly=Dload1
new load.load7 bus1=bus7 like=load1 yearly=Dload2
.
.
.
new load.load100 bus1=bus100 like=load1 yearly=Dload4
54
5.3.
Procedimiento matemático para determinar la localización óptima de un generador distribuido
La localización óptima de un generador distribuido en un alimentador radial con carga uniformemente distribuida puede ser determinada planteando las ecuaciones que definen las pérdidas de potencia del sistema en función de la potencia y la ubicación del generador en dicho
alimentador. Para realizar dicho análisis se asumen las siguientes simplificaciones:
Únicamente se consideran los parámetros de resistencia e inductancia del alimentador
El generador inyecta solo potencia activa
La longitud total del alimentador será de 1.0 por unidad
Las pérdidas de potencia producidas por la corriente que fluye a través de una resistencia pueden
dividirse en dos componentes, cada una es generada por la componente activa y reactiva de la
corriente respectivamente.
(5.1)
I 2 R = (Icosφ )2 R + (Isinφ )2 R
Al introducir un generador que inyecta únicamente potencia activa solamente se verán afectadas las pérdidas producidas por la componente activa.
I12 R = Icosφ − Idg
2
R + (Isinφ )2 R
(5.2)
Debido a esto las pérdidas producidas por la componente reactiva de la corriente no serán
tomadas en cuenta, ya que la reducción de pérdidas es debida únicamente a la componente
activa.
∆PLS = I 2 R − I12 R
(5.3)
2
R
∆PLS = 2 (Icosφ ) Idg R − Idg
(5.4)
Para un alimentador radial con una carga uniformemente distribuida y una carga concentrada
al final de la lı́nea la ecuación de corriente a lo largo del alimentador se define como:
I (x) = I1 − (I1 − I2 ) x
(5.5)
I1 : Corriente activa total del sistema
I2 : Corriente activa concentrada al final de la lı́nea
x: Distancia en por unidad medida desde el comienzo del alimentador
La Figura 5.6 muestra el perfil de corriente de un alimentador con carga uniformemente
distribuida y una carga concentrada al final del mismo.
55
Figura 5.6: Perfil de corriente alimentador con carga uniformemente distribuida y una carga
concentrada al final de la lı́nea
El diferencial de pérdidas para un segmento diferencial de la lı́nea puede definirse como:
dPLS = 3 [I1 − (I1 − I2 ) x]2 Rdx
(5.6)
R: Resistencia total del alimentador
Las pérdidas totales en el alimentador serán
Z 1
PLS =
x=0
Z 1
(5.7)
dPLS
[I1 − (I1 − I2 ) x]2 Rdx
x=0
2
= I1 + I1 I2 + I22 R
=3
Al introducir un generador que inyecta una corriente Idg y que se encuentra a una distancia
x1 del origen del alimentador, la nueva ecuación de corriente será:
I(x) = I1 − (I1 − I2 ) x − Idg 0 ≤ x ≤ x1
I1 − (I1 − I2 ) x x1 ≤ x ≤ 1
(5.8)
La Figura 5.7 muestra el nuevo perfil de corriente en el alimentador luego de la introducción
de un generador distribuido.
Por lo tanto las nuevas pérdidas del sistema pueden calcularse como:
0
Z x1 2
Z 1
I1 − (I1 − I1 ) x − Idg Rdx + 3
[I1 − (I1 − I2 ) x]2 Rdx
x=x1
h
i
2
R
= I12 + I1 I2 + I22 R + 3x1 (x1 − 2) I1 Idg − x1 I2 Idg + Idg
PLS = 3
x=0
56
(5.9)
Figura 5.7: Nuevo perfil de corriente alimentador con generación distribuida
La reducción de pérdidas de potencia en por unidad debida a la introducción de un generador
distribuido es:
0
PLS − PLS
∆PLS =
PLS
h
i
2
−3x1 (x1 − 2) I1 Idg − x1 I2 Idg + Idg
=
I12 + I1 I2 + I22
(5.10)
Se define c como la relación entre la potencia en kW del generador distribuido y la potencia
nominal, también en kW, de la carga instalada en el sistema; λ es definido como la relación entre
la corriente de la carga concentrada al final de la lı́nea y la corriente total al principio del alimentador; manipulando la ecuación anterior se obtendrá una nueva ecuación para la reducción
de pérdidas de potencia en función del factor de compensación c y λ .
c=
Idg
I1
(5.11)
λ=
I2
I1
(5.12)
3x1 c
[2 − x1 + x1 λ − c]
(5.13)
1+λ +λ2
Las Figuras 5.8, 5.9 y 5.10 muestran la reducción de pérdidas en función de x1 y c para
diferentes valores de λ . Se observa que para λ =0 es posible encontrar una distancia que reduce
al máximo las pérdidas para todos los valores de c. Sin embargo, a medida que λ aumenta las
curvas de pérdidas no presentan un máximo para valores pequeños de c sino que siguen creciendo, lo que implica que para obtener la máxima reducción de pérdidas posibles el generador
distribuido debe ser instalado al final de la lı́nea, ya que matemáticamente la distancia óptima
se encuentra más allá del final del alimentador. Si el valor de λ sigue aumentando, entonces los
valores de c para los cuales no será posible encontrar la distancia óptima también aumentarán.
∆PLS =
57
Figura 5.8: Reducción de pérdidas λ =0
Figura 5.9: Reducción de pérdidas λ =1/4
58
Figura 5.10: Reducción de pérdidas λ =1/2
La ecuación de reducción de pérdidas puede ser simplificada definiendo el parámetro α:
α=
1
1+λ +λ2
(5.14)
∆PLS = 3αx1 c [2 − x1 + x1 λ − c]
(5.15)
Si se considera la introducción de dos generadores que inyectan la misma potencia puede
seguirse el mismo procedimiento para determinar las pérdidas de potencia y la reducción de
pérdidas respecto al caso sin generación distribuida:
0
PLS = 3
Z x1 x=0
Z 1
2
I1 − (I1 − I2 ) x − 2Idg Rdx + 3
+3
x=x2
Z x2 x=x1
2
I1 − (I1 − I2 ) x − Idg Rdx
(5.16)
[I1 − (I1 − I2 ) x]2 Rdx
∆PLS = 3αc {x1 [2 − x1 + λ x1 − 3c] + x2 [2 − x2 + λ x2 − c]}
(5.17)
La ecuación de reducción de pérdidas puede ser ampliada para incluir el efecto de n generadores distribuidos:
n
∆PLS = 3αc ∑ xi [2 − xi + λ xi − (2i − 1) c]
(5.18)
i=1
c: Factor de compensación para cada generador distribuido.
xi : Distancia hasta la posición del i-ésimo generador distribuido desde el inicio del alimentador.
59
n: Número total de generadores distribuidos.
La distancia óptima para el i-ésimo generador distribuido puede ser encontrada al derivar la
ecuación de reducción de pérdidas e igualandola a cero:
1
(2i − 1) c
−
1 − λ 2 (1 − λ )
xi,opt =
(5.19)
xi,opt : Distancia óptima para el i-ésimo generador distribuido.
El valor de xi,opt es sustituido en la ecuación original, de tal manera que la ecuación dependerá únicamente de c:
n (2i − 1) c
i2 c2
c2
ic2
1
−
+
−
−
(5.20)
∆PLS,opt = 3αc ∑
1−λ
1 − λ 4 (1 − λ ) 1 − λ
i=1 1 − λ
Las siguientes igualdades serán utilizadas para simplificar la ecuación de reducción de pérdidas óptima:
n
∑ (2i − 1) = n2
(5.21)
i=1
n
n (n + 1)
2
(5.22)
n (n + 1) (2n + 1)
6
(5.23)
∑i=
i=1
n
∑ i2 =
i=1
n
1
∑ 1−λ
=
i=1
n
1−λ
(5.24)
Al utilizar las igualdades presentadas se obtiene una nueva ecuación para la reducción de
pérdidas óptima:
"
#
2 n 4n2 − 1
c
3αc
∆PLS,opt =
n − cn2 +
(5.25)
1−λ
12
El factor de compensación para cada generador distribuido puede ser encontrado derivando
la ecuación de reducción de pérdidas óptima e igualandola a cero:
c=
2
2n + 1
(5.26)
Para el caso particular de un generador distribuido resulta:
c=
60
2
3
(5.27)
x1 =
2
3 (1 − λ )
∆PLS,opt =
8α
9 (1 − λ )
(5.28)
(5.29)
Resulta interesante observar que el factor de compensación para un generador distribuido no
depende del parámetro λ .
Si ahora se considera que el sistema solo cuenta con carga uniformemente distribibuida:
λ =0
2
pu
(5.30)
3
2
(5.31)
x1opt = pu
3
8
∆PLSopt = pu
(5.32)
9
Para el presente estudio la carga total del sistema es igual a 7.5 MW y el alimentador posee
una distancia total de 10000 pies, por lo que los valores óptimos para este caso en especı́fico
serán:
Pgen = 5 MW
(5.33)
copt =
x1opt = 6667 pies
(5.34)
Mientras que la reducción pérdidas será de un 88.89 %
5.4.
Localización óptima de un generador distribuido con carga constante
Esta parte del estudio se ha realizado teniendo en cuenta los siguientes aspectos:
OpenDSS trabajará en modo snapshot
Las demandas son constantes
El objetvo es minimizar las pérdidas de potencia activa
5.4.1.
Caso base sin generación distribuida
Las condiciones de operación muestran que el caso base no presenta problemas de tensión
ni de sobrecarga en ninguno de los elementos que componen al sistema (Ver Tabla 5.5). La
Figura 5.11 muestra el perfil de tensión a lo largo del alimentador para el caso base.
61
Tensión
mı́nima (pu)
0.961
Pérdidas
potencia (kW)
107.7
Potencia activa
Sobrecarga
secundario Tx (kW)
(kW)
7592.9
0
Tabla 5.5: Condiciones de operación caso base con carga constante
Figura 5.11: Perfil de tensión caso base con carga constante
5.4.2.
Resultados
En la implementación del método se han simulado 1000 casos con el fin de alcanzar el
objetivo propuesto; se considera un número suficientemente grande como para proporcionar resultados correctos. La Figura 5.12 muestra los resultados obtenidos; concretamente la variación
de las pérdidas de potencia activa del sistema en función de la potencia nominal del generador
y de la distancia respecto al origen del alimentador donde se encuentra localizado dicho generador. La superficie muestra la existencia de una combinación única de potencia-distancia para la
cual las pérdidas del sistema son mı́nimas. Además, se puede observar que si se asume un valor
de potencia determinado existe una distancia especı́fica para la cual las pérdidas son reducidas
a un mı́nimo para dicha potencia; de la misma forma para cada valor de distancia existirı́a un
valor de potencia para el cual las pérdidas serı́an mı́nimas.
Los valores óptimos de potencia y distancia se presentan en la Tabla 5.6.
El valor de potencia óptima encontrado por el método representa el 70.4 % de la carga total
del sistema, mientras que la distancia óptima es aproximadamente el 65 % de la distancia total
del alimentador. Dichos valores corroboran los resultados esperados a partir de la regla de los
2/3, aún cuando dichos valores no se ajustan perfectamente a los valores teóricos, ya que de62
Figura 5.12: Pérdidas de potencia en función de Potencia-Distancia (1000 casos)
Potencia
Distancia
Pérdidas
óptima (kW) óptima (pies) óptimas (kW)
5280
6504
29.37
Tabla 5.6: Valores óptimos con carga constante
bemos de recordar que dicho análisis es realizado teniendo en cuenta modelos monofásicos y
algunas simplificaciones.
5.4.3.
Simulación de caso óptimo
Se ha decidido comprobar que los valores óptimos obtenidos efectivamente producen la reducción de pérdidas esperadas en el sistema y que las condiciones de operación del mismo se
mantienen dentro de parámetros aceptables luego de la introducción del generador distribuido. La potencia del generador de prueba será de 5280 kW y se encontrará ubicado en el bus
desginado como bus65 (Ver Figura 5.13).
Tensión
mı́nima (pu)
0.979
Pérdidas
potencia (kW)
29.4
Potencia activa
Sobrecarga
secundario Tx (kW)
(kW)
2245.7
0
Tabla 5.7: Condiciones de operación caso óptimo con carga constante
Las condiciones del sistema para el caso óptimo se presentan en la Tabla 5.7, dichas condiciones se consideran aceptables y las pérdidas obtenidas a través de la simulación son las
63
Figura 5.13: Esquema unifilar caso óptimo carga constante
esperadas. Sin embargo, es importante identificar que la introducción de la generación distribuida ha traı́do consigo un beneficio adicional, la mejora del perfil de tensión. Dicho efecto
puede observarse en la elevación del valor mı́nimo de tensión, este hecho puede no parecer tan
importante ya que desde un comienzo no se existı́an problemas con la tensión pero lo hubiese sido si el caso base presentara una tensión mı́nima inaceptable. Además, la reducción de la
potencia entregada desde el secundario del transformador implica un aumento de la capacidad
del sistema de suministrar potencia, ya que los segmentos de lı́nea que se encuentran al principio del alimentador trabajarán a un nivel de carga menor que en el caso base. La Figura 5.14
muestra el perfil del tensión a lo largo del alimentador para el caso donde se utilizan los valores
óptimos de potencia y distancia para el generador distribuido.
Figura 5.14: Perfil de tensión caso óptimo con carga constante
64
5.5.
Localización óptima de un generador distribuido con carga variable en el tiempo
El procedimiento seguido para determinar la localización óptima de un generador distribuido con carga dependiente del tiempo varı́a ligeramente respecto al utilizado con carga constante.
Varios aspectos se deben de tener en cuenta:
OpenDSS trabajará en modo time
Se utilizarán las curvas de carga en todos los nudos del sistema
Se minimizarán las pérdidas de energı́a en kWh
Se tendrán en cuenta restricciones técnicas de tensión y sobrecarga para descartar combinaciones potencia-distancia
En el estudio presentado anteriormente la única información recogida al término de la simulación de cada caso era las pérdidas de potencia totales del sistema, sin embargo en esta ocasión
para poder aplicar las restricciones técnicas definidas será necesario recopilar una mayor cantidad de información, la información registrada será:
La tensión mı́nima anual.
La tensión máxima anual.
Las pérdidas anuales de energı́a en kWh.
La energı́a anual entregada desde el sistema aguas arriba hacia la red de prueba.
Los kWh de sobrecarga
El valor mı́nimo de energı́a por hora entregada por el sistema aguas arriba. Dicho parámetro será utilizado para determinar la presencia de flujo inverso desde la red de prueba hacia
el sistema aguas arriba.
5.5.1.
Caso base sin generación distribuida
La información obtenida a partir de la simulación del caso base sin generación distribuida
se presenta en la Tabla 5.8.
Energı́a
anual (kWh)
27781333
Pérdidas
anuales (kWh)
185253
Tensión
Sobrecarga
mı́nima (pu)
(kWh)
0.9682
0
Tabla 5.8: Condiciones de operación caso base con carga variable en el tiempo
65
La información presentada muestra que el sistema trabaja bajo condiciones de operación
aceptables, ya que no presenta problemas de tensión o de sobrecarga. La Figura 5.15 muestra la
variación de la carga total del sistema en función del tiempo.
Figura 5.15: Carga total del sistema en función del tiempo
5.5.2.
Resultados
El método ha sido probado considerando diversos números de casos a analizar, esto con el
objetivo de determinar el número de casos necesarios para obtener resultados válidos. Anteriormente el número de casos a analizar no habı́a sido un factor restrictivo al implementar el método
ya que los tiempos de simulación son relativamente cortos pero en esta ocasión al tratarse de
simulaciones anuales, los tiempos de simulación se incrementan notablemente. Los resultados
se presentan en la Tabla 5.9.
Número
Potencia
Distancia
de casos óptima (kW) óptima (pies)
300
4629
6557
600
4656
6546
1000
4640
6553
Tiempo de
Casos
simulación
descartados
45 minutos
0
1 hora 30 minutos
0
2 horas 15 minutos
0
Tabla 5.9: Localización óptima según número de casos analizados
A partir de los resultados obtenidos es posible observar que no existe mayor diferencia en los
resultados a pesar que el número de casos utilizados en la simulación sı́ varı́a considerablemente; sin embargo el tiempo total de simulación sı́ presenta grandes diferencias. Además, ninguno
66
de los casos simulados ha presentado condiciones de operación que lo llevasen a ser descartado
por haber incumplido alguna de las restricciones técnicas impuestas al comienzo del estudio.
Respecto al número óptimo de casos a utilizar con el método, dependerá de la disponibilidad de
tiempo para llevar a cabo el estudio, porque aún cuando el tiempo de simulación aumenta con
el número de casos, no es menos cierto que utilizar un mayor número de casos permite obtener
resultados más exactos y repetibles, por lo que en el presente estudio se tomará como base la
simulación que comprende los 1000 casos.
La Figura 5.16 muestra la variación de las pérdidas anuales de energı́a en función de la
potencia y la distancia respecto al origen del alimentador donde se encuentra instalado el generador utilizando la información generada en una simulación que ha tenido en cuenta 1000 casos
de prueba. La forma de la superficie presenta un comportamiento muy parecido a la encontrada
para el caso con carga constante, por lo que algunas de las caracterı́sticas discutidas anteriormente también son válidas. Por ejemplo, existe una única combinación potencia-distancia que
minimiza las pérdidas. A pesar de esto, la superficie de pérdidas de energı́a presenta una diferencia respecto a la de pérdidas de potencia: a medida que la potencia aumenta a un nivel
cercano a la potencia nominal de la carga instalada y la distancia se acerca a la distancia total
del alimentador, la curva deja de crecer y presenta un comportamiento aproximadamente constante, lo que implica que para valores cercanos a los valores máximos permitidos tanto para
potencia como distancia las diferencias en las pérdidas son casi despreciables. Para el presente
caso la uniformidad de la curva también se debe a que se ha utilizado el mismo patrón de generación para todas las posiciones posibles, ya que si consideráramos cambios en dicho patrón
según la posición del generador serı́a muy probable que la curva presentara irregularidades en
su comportamiento. La Tabla 5.10 muestra un resumen de los resultados más importantes de
esta parte del estudio.
Figura 5.16: Pérdidas de energı́a en función de Potencia-Distancia (1000 casos)
67
Potencia
Distancia
Pérdidas
óptima (kW) óptima (pies) óptimas (kWh)
4640
6553
134740
Tabla 5.10: Valores óptimos con carga variable en el tiempo
El uso de curvas de carga implica que para cada momento existe una potencia y distancia
diferentes que reducen las pérdidas a un mı́nimo. Sin embargo, debido a que es imposible cambiar la potencia nominal y la posición del generador distribuido, la potencia y posición óptimas
serı́an aquellas que en promedio reduzcan al máximo las pérdidas de energı́a. Respecto a los
valores obtenidos a partir de las simulaciones se observa una diferencia notable en el valor de
potencia nominal del generador distribuido respecto a los obtenidos con carga constante, mientras que la distancia óptima no presenta mayor diferencia. Los valores óptimos de potencia y
distancia obtenidos utilizando curvas de carga prueban que para dicho caso la regla de los 2/3
no es válida, precisándose por tanto de un estudio especı́fico para cada sistema en estudio.
5.5.3.
Simulación de caso óptimo
Figura 5.17: Esquema unifilar caso óptimo carga variable en el tiempo
Se llevará a cabo una simulación utilizando los valores óptimos de potencia y distancia para
comprobar que dicha combinación proporciona la reducción de pérdidas esperadas y que efectivamente cumple con las restricciones técnicas planteadas. Para dicha simulación la potencia
nominal del generador distribuido será de 4640 kW y se encontrará ubicado en el bus designado
como bus65 (Ver Figura 5.17).
Energı́a
anual (kWh)
20280156
Pérdidas
anuales (kWh)
134737
Tensión
mı́nima (pu)
0.9696
Tensión
Sobrecarga
máxima (pu)
(kWh)
1.015
0
Tabla 5.11: Condiciones de operación caso óptimo con carga variable en el tiempo
68
Los resultados obtenidos a partir de la simulación del caso óptimo se muestran en la Tabla 5.11. Las pérdidas de energı́a producidas utilizando el caso óptimo presentan una diferencia
insignificante en comparación a las calculadas utilizando los métodos de interpolación, lo que
indica que los datos obtenidos con el software TableCurve3D son confiables y que 1000 casos
es un número que brinda una exactitud muy alta al calcular la combinación óptima de potencia
y distancia.
5.5.4.
Impacto de la restricción de flujo inverso
Hasta este momento la restricción que impedı́a la existencia de flujo de potencia desde la
red de estudio hacia la red aguas arriba, es decir, flujo inverso, no habı́a sido tomada en cuenta
al momento de realizar el estudio. En vistas a un estudio real, esta restricción resulta muy
importante, ya que actualmente muchas compañı́as no permiten la presencia de flujo inverso.
Para comprobar el efecto de dicha restricción se aplicó el método al mismo sistema, utilizando
600 y 1000 casos de prueba. Los resultados se muestran en la Tabla 5.12.
Número
Potencia
Distancia
de casos óptima (kW) óptima (pies)
600
1362
9000
1000
1393
9000
Casos
descartados
497
823
Tabla 5.12: Localización óptima con restricción de flujo inverso
Los resultados obtenidos difieren en gran medida respecto a los que fueron encontrados
cuando la restricción de flujo inverso no fue tomada en cuenta. De igual forma el número de
casos descartados en ambas simulaciones representan aproximadamente el 82 % del total de
casos, lo que implica que el número de casos disponibles para encontrar la combinación óptima
potencia-distancia es muy bajo. La Figura 5.18 muestra la variación de las pérdidas anuales
de energı́a en función de la potencia y la distancia. Dicha superficie muestra una tendencia
inicial similar a la mostrada por la superficie obtenida sin tomar en cuenta la restricción de flujo
inverso, sin embargo la superficie actual parece truncarse y llegar a un punto mı́nimo que no
guarda ninguna relación con el punto mı́nimo encontrado anteriormente.
La razón por la cual la no presencia de flujo inverso se convierte en un condición tan restrictiva se encuentra en el hecho que la curva total de carga del sistema presenta puntos de baja
demanda, mientras que para los mismos momentos el generador fotovoltaico presenta un factor
de carga muy alto (Ver Figura 5.19), por lo que un valor de potencia nominal del generador
que no sea especialmente grande puede producir flujo inverso. Aunque el número de casos no
descartados sea demasiado bajo para que los resultados sean considerados confiables, el analizar las condiciones del sistema y el comportamiento de la curva de pérdidas de energı́a anuales
muestra que la manera de minimizar las pérdidas de energı́a será encontrar la potencia máxima
que no viole el criterio de flujo inverso y definir la distancia para la cual dicha potencia produce
las menores pérdidas. La Tabla 5.13 presenta los valores óptimos cuando se toma en cuenta la
restricción de flujo inverso.
69
Figura 5.18: Pérdidas anuales utilizando restricción de flujo inverso (1000 casos)
Figura 5.19: Perfiles de carga y generación
Potencia
Distancia
Pérdidas
óptima (kW) óptima (pies) óptimas (kWh)
1393
9000
157475
Tabla 5.13: Valores óptimos con restricción de flujo inverso
70
5.5.5.
Localización óptima de dos generadores distribuidos
El método presentado ha sido desarrollado para determinar la localización óptima de un
generador distribuido, sin embargo el proceso de simulación basado en Monte Carlo puede ser
extendido para simular dos o más generadores distribuidos. Los aspectos a tomar en cuenta al
determinar la localización óptima de dos generadores distribuidos serán:
Se generarán de forma independiente los parámetros de potencia e ı́ndice del bus de prueba para cada generador
Se utilizarán las curvas de carga en todos los nudos del sistema
Ambos generadores utilizarán el mismo perfil de generación.
Se minimizarán las pérdidas de energı́a en kWh
Se tendrán en cuenta restricciones técnicas de tensión y sobrecarga para descartar combinaciones potencia-distancia
Resultados
El método fue probado utilizando diferentes números de casos de prueba y los resultados
muestran una evidente disparidad en los valores óptimos según el número de casos de prueba
utilizados, lo cual se debe a que a diferencia de los estudios anteriores en esta ocasión se cuenta
con cuatro variables aleatorias y no dos, por lo que se necesita un mayor número de casos de
prueba para poder obtener una muestra representativa de todas las combinaciones posibles. Debido a la dificultad que implica interporlar y optimizar un grupo de datos con cuatro variables
aleatorias, se presentan como casos óptimos aquellas combinaciones que produjeron las menores pérdidas en cada una de las simulaciones realizadas. La Tabla 5.14 presenta un resumen de
los resultados obtenidos.
Número
de casos
300
600
1000
Potencia
óptima
unidad 1 (kW)
2350
3343
2817
Distancia
óptima
unidad 1 (pies)
3200
4100
3000
Potencia
óptima
unidad 2 (kW)
3164
2175
3032
Distancia
óptima
unidad 2 (pies)
8200
9200
7600
Casos
descartados
66
134
211
Tabla 5.14: Localización óptima 2 generadores
Para poder lograr obtener resultados que sean válidos deberá aumentarse el número de casos
de prueba hasta el punto que dichos combinaciones sean una representación válida de las combinaciones posibles, lo anterior implica un incremento en el tiempo de simulación necesario
para llevar a cabo el estudio. Cabe mencionar que los tiempos de simulación dependen únicamente del número de casos a simular y no del número de generadores distribuidos tomados en
71
cuenta, por lo que resulta indiferente incluir uno, dos o más generadores; de igual forma para
OpenDSS no representa mayor carga computacional la inclusión de más de un generador en el
sistema para su simulación.
5.6.
Localización óptima de bancos de condensadores
El método de localización óptima de generadores distribuidos puede ser utilizado también
para determinar la localización de bancos de condensadores. Conceptualmente el método no
varı́a ya que el objetivo será generar valores aleatorios para la potencia y la posición del banco
de condensadores y a partir de la información generada, tras analizar cada caso, con la ayuda
de los mismos algoritmos de interpolación multivariable encontrar la combinación potenciaposición que reduzca al mı́nimo las pérdidas del sistema. Los aspectos a tomar en cuenta al
llevar a cabo el estudio son:
El banco de condesadores será simulado a través de un generador de prueba que inyectará únicamente potencia reactiva.
La potencia máxima que podrá adoptar el generador de prueba será el total de la carga
reactiva instalada en el sistema.
OpenDSS trabajará en modo snapshot
Las demandas son constantes
Se minimizarán las pérdidas de potencia en kW
Se realizarán las simulaciones utilizando 1000 casos de prueba
5.6.1.
Localización óptima teórica de bancos de condensadores
La localización óptima de n bancos de condensadores en un alimentador radial puede ser
deducida utilizando el mismo procedimiento que el mostrado para generadores distribuidos con
la diferencia de que se trababajará con potencias y corrientes reactivas; a partir de este enfoque
es posible determinar la localización óptima de bancos de condensadores en un sistema radial
que alimenta una carga uniformemente distribuida con las siguientes fórmulas:
c=
2
2n + 1
(2i − 1) c
2
= nc
xi,opt = 1 −
ctot
n: número de bancos de condensadores
c: factor de compensación óptimo individual
72
(5.35)
(5.36)
(5.37)
i: i-ésimo banco de condensadores
xi,opt : distancia óptima respecto al inicio del alimentador del i-ésimo banco de condensadores
ctot : factor de compensación total de los n bancos de condensadores
5.6.2.
Localización óptima de un banco de condensadores
La localización óptima teórica de un banco de condensadores puede ser calculada utilizando las fórmulas presentadas en la sección anterior, los valores obtenidos se muestran en la
Tabla 5.15.
Compensación Compensación Distancia
individual (pu)
total (pu)
óptima (pu)
2/3
2/3
2/3
Tabla 5.15: Localización óptima teórica de un banco de condensadores
El sistema bajo estudio tiene un carga reactiva total de 3.63 Mvar y el alimentador tiene una
longitud total de 10000 pies por lo que los valores óptimos serán 2420 kvar y 6667 pies.
Resultados
La Figura 5.20 describe la dependencia de las pérdidas de potencia en función de la potencia
y la distancia asignadas al banco de condensadores. La superficie presenta el mismo patrón que
la superficie generada para la localización óptima de un generador distribuido pero al observar
la escala se observa que la reducción de las pérdidas es menor que la producida con el generador
distribuido; esto es debido a que la potencia reactiva que fluye por el alimentador es menor que
la potencia activa por lo que las pérdidas producidas por la componente reactiva también son
menores, debido a esto al introducir un banco de condensadores que compensa únicamente
potencia reactiva la reducción de las pérdidas será menor que cuando se introduce un generador
distribuido que compensa potencia activa. Los valores óptimos encontrados para la localización
óptima de un banco de condensadores se muestran en la Tabla 5.16.
Potencia
Distancia
Pérdidas
óptima (kvar) óptima (pies) óptimas (kW)
2892
6177
85.84
Tabla 5.16: Valores óptimos para un banco de condensadores
Los resultados obtenidos muestran una diferencia importante respecto a los obtenidos teóricamente, que corresponden a la regla de los 2/3, ya que el valor óptimo de potencia corresponde
a un 79.67 % de la carga reactiva total del sistema y la distancia óptima equivale aproximadamente a un 62 % de la longitud total del alimentador. Aunque la distancia óptima encontrada a
73
Figura 5.20: Pérdidas de potencia en función de Potencia-Distancia (1000 casos)
través del método presenta cierta diferencia con el valor téorico, la diferencia no es mucha y el
valor se encuentra dentro de lo esperado, considerando siempre la simplificaciones utilizadas
en la deducción de dichas fórmulas. Respecto al valor óptimo encontrado para la potencia del
banco de condensadores existen diferentes razones que causan la diferencia presente pero el
principal factor que provoca dicha diferencia es el modelo del alimentador utilizado en el estudio; el modelo de alimentador usado es un modelo que toma en cuenta muchos más aspectos
(capacitancia de las lı́neas, geometrı́a, desbalances, etc.) que el modelo reducido utilizado en el
cálculo de la regla de los 2/3.
5.6.3.
Localización óptima de dos bancos de condensadores
La localización óptima teórica de dos bancos de condensadores que poseen la misma potencia nominal se presenta en la Tabla 5.17.
Compensación
individual (pu)
2/5
Compensación
total (pu)
4/5
Distancia óptima
banco 1 (pu)
2/5
Distancia óptima
banco 2 (pu)
4/5
Tabla 5.17: Localización óptima teórica de dos bancos de condensadores
La potencia óptima de cada banco de condensadores será de 1452 kvar y las distancias
óptimas serán 4000 y 8000 pies respectivamente.
74
Resultados
En primer lugar el método fue utilizado para determinar la localización óptima de ambos
bancos de condensadores conociendo de antemano el factor de compensación total deseado,
por lo que en este caso las variables aleatorias serán las distancias respecto al principio del
alimentador de ambos bancos. La Tabla 5.18 presentan un resumen con los resultados más
importantes de esta parte del estudio.
Los resultados muestran que la reducción máxima de pérdidas se da con un factor de compensación de 100 %, a diferencia del 80 % calculado teóricamente, lo cual se encuentra dentro
de lo esperado considerando la diferencia encontrada al determinar la localización óptima de un
banco de condensadores. Sin embargo, la diferencia en las pérdidas de potencia obtenidas con
un factor de compensación de 100 % y uno de 80 % es muy pequeña. Para el caso concreto de
un factor de compensación de 80 % las distancias encontradas para ambos bancos de condensadores no presentan grandes diferencias respecto a las calculadas teóricamente. La Figura 5.21
muestra las pérdidas de potencia en función de las distancias de ambos bancos de condensadores para un factor de compensación total de 80 %; la superficie parece estar formada por dos
curvas donde una es el reflejo de la otra, esto se debe a que al tener la misma potencia ambos
generadores las distancias son intercambiables entre ellos, lo que genera dicho comportamiento
en la curva.
Factor de
Distancia óptima
compensación ( %)
banco 1 (pies)
20
8631
40
7193
60
5747
80
4303
100
2897
Distancia óptima
banco 2 (pies)
10000
9091
8598
8093
7590
Pérdidas
(kW)
97.39
90.45
86.32
84.33
83.83
Tabla 5.18: Valores óptimos para dos bancos de condensadores con factor de compensación
conocido
El método fue probado nuevamente pero en esta ocasión el factor de compensación no fue
escogido de antemano sino que también fue elegido de manera aleatoria, por lo que el estudio
contó con 3 variables aleatorias. Utilizando 1000 casos de prueba se pretende optimizar tanto la
posición como la potencia de ambos bancos de condensadores.
Una vez más debido a la dificultad de optimizar una función con tres variables aleatorias se
ha escogido como caso óptimo aquel que caso que durante la simulación produjo las menores
pérdidas de potencia, los resultados del caso considerado como óptimo se presentan en la Tabla 5.19. El factor de compensación es de aproximadamente 94 % y las pérdidas son un poco
mayores que las encontradas con un 100 % de compensación, aún ası́ las diferencias entre ambos valores son mı́nimas. Utilizando la ecuación que permite encontrar las distancias óptimas
para ambos generadores conociendo el factor de compensación se obtienen distancias de 2950
y 7600 pies para los dos bancos, resultados que concuerdan casi perfectamente con los obteni75
Figura 5.21: Pérdidas de potencia en función de las distancias de ambos bancos de condensadores (c=80 %, 1000 casos)
dos a través de la simulación. Estos resultados y los encontrados anteriormente para un factor
de compensación de 80 % muestran que el modelo del alimentador no tiene mayor influencia
al optimizar las posiciones de dos bancos de condensadores, ya que los resultados obtenidos a
partir del método concuerdan con los obtenidos a través de las ecuaciones teóricas, lo que no
sucede al optimizar la potencia de los bancos.
Potencia óptima Distancia óptima
individual (kvar)
banco 1 (pies)
1692
3000
Distancia óptima
banco 2 (pies)
7600
Pérdidas
(kW)
83.92
Tabla 5.19: Valores óptimos para dos bancos de condensadores con factor de compensación
determinado aleatoriamente
76
Capı́tulo 6
Conclusiones
6.1.
Conclusiones sobre la implementación del método
La utilización del método de Monte Carlo ha permitido optimizar tanto la potencia nominal del generador distribuido como su posición dentro del sistema estudiado.
La selección de OpenDSS como herramienta de simulación presenta ventajas evidentes,
ya que ha permitido por un lado llevar a cabo estudios con carga constante (tipo snapshot),
y por otro, estudios que tienen en cuenta cargas que varı́an con el tiempo (anuales), lo
que proporciona un valor agregado al contemplar condiciones más reales para el sistema.
Además, los modelos de los elementos de red utilizados por OpenDSS permiten analizar
sistemas complejos con caracterı́sticas reales.
El método ha sido utilizado únicamente para la localización óptima de un generador distribuido en un alimentador radial, sin embargo éste puede ser expandido fácilmente y utilizado en redes mucho más complejas; para ello es necesario que la definición del sistema
y la asignación de los buses en OpenDSS sean hechas de forma ordenada y separadas por
zonas, según las configuración de la red.
El método puede ser utilizado para determinar la localización óptima de más de un generador distribuido, ya que generar los parámetros aleatorios de potencia y ubicación para
más de un generador distribuido e incluirlo en el sistema para su simulación no representa
mayor reto, de la misma manera para OpenDSS la inclusión de más generadores no presenta un aumento de carga computacional representativo. De igual manera, los tiempos
simulación totales no dependen del número de generadores a analizar sino del número de
casos de prueba simulados, por lo que tampoco implica un aumento en los tiempos de trabajo. El mayor reto se presenta al momento de definir algoritmos que permitan optimizar
un sistema que depende de más de dos variables aleatorias.
El método puede ser utilizado también para determinar la localización óptima de un banco de condensadores; el procedimiento general no presenta mayores cambios, la mayor
77
diferencia radica que en lugar de incluir un generador en el sistema se incluirá un banco
de condensadores o un generador que inyecta únicamente potencia reactiva, el resto del
procedimiento será el mismo.
6.2.
Conclusiones sobre los resultados obtenidos
La determinación de la localización óptima de un generador distribuido ha permitido
comprobar que la regla de los 2/3 es válida cuando se trabaja con alimentadores radiales
con carga uniformemente distribuida y que no varı́a con el tiempo. Sin embargo, los
resultados obtenidos utilizando cargas dependientes del tiempo muestran que para este
escenario dicha regla no es válida y que es necesario llevar a cabo un estudio individual
para cada sistema con el objetivo de determinar la localización óptima de un generador
distribuido.
Las curvas generadas para las pérdidas de potencia (carga constante) y pérdidas anuales
de energı́a (curvas de carga) presentan un comportamiento similar. Dicho comportamiento muestra que existe un única combinación potencia-distancia que reduce las pérdidas
del sistema al máximo. Además, se observa que para cada valor de potencia existe una
distancia para la cual las pérdidas se reducen a un mı́nimo y que a medida dicho valor de
potencia aumenta, la distancia respecto al inicio del alimentador se reduce. Igualmente,
para cada valor de distancia existe un valor único de potencia para el cual las pérdidas se
minimizan.
Para el sistema bajo estudio la condición de no flujo inverso probó ser altamente restrictiva. Dicha restricción no fue tomada en cuenta durante el desarrollo del resto de estudio,
ya que dicha limitación en los valores de potencia no permitı́a determinar los valores óptimos de potencia y distancia para el generador con el fin de reducir al máximo las pérdidas
de energı́a del sistema
Los resultados obtenidos al utilizar 1000 casos de prueba muestran que dicho número
ofrece una excelente exactitud y permite alcanzar resultados válidos. La exactitud alcanzada con 1000 casos es tal que las diferencias entre las pérdidas calculadas como el punto
mı́nimo de la curva de pérdidas y las obtenidas a través de la simulación del caso óptimo
son muy pequeñas.
Al determinar la localización óptima de un banco de condensadores en un alimentador
radial con carga uniformemente distribuida y que no varı́a con el tiempo los resultados no
concuerdan con los esperados a partir de la regla de los 2/3. Esto se debe principalmente a
la influencia del modelo de alimentador utilizado en la simulación y a las simplificaciones
utilizadas en la deducción de dicha regla.
Los resultados obtenidos al determinar la localización óptima de dos bancos de condensadores muestran que las distancias óptimas encontradas con el método varı́an poco con
78
respecto a las calculadas utilizando las ecuaciones teóricas. Dichas resultados indican
que el modelo del alimentador afecta la determinación de la potencia óptima del banco
de condensadores pero en el caso de que el factor de compensación sea conocido de antemano, el modelo del alimentador no introduce mayor diferencia al momento de calcular
las distancias óptimas de los bancos.
6.3.
Objetivos futuros
Expandir el método para que sea capaz de analizar redes más grandes y complejas que
incluyan circuitos tanto trifásicos como monofásicos.
Llevar a cabo estudios que comprendan un análisis para varios años y que contemplen la
variación anual de carga.
Utilizar las prestaciones de Matlab para generar las salidas gráficas necesarias y determinar la localización óptima de un generador distribuido, lo que harı́a innecesario el uso de
otras herramientas externas de software.
Utilizar Matlab u otra herramienta externa para optimizar casos que involucren más de
dos variables aleatorias.
Definir una nueva función multi-objetivo que permita optimizar otros parámetros de la
red y no únicamente las pérdidas totales del sistema.
79
Bibliografı́a
[1] H.L. Willis, Analytical Methods and Rules of Thumb for Modeling DG-Distribution Interaction. IEEE PES Summer Meeting, 3: 1643-1644, 2000.
[2] K. Nara, Y. Hayashi, K. Ikeda, and T. Ashizawa, Application of Tabu Search to Optimal
Placement of Distributed Generators. IEEE PES Winter Meeting, 2: 918-923, 2001.
[3] T. Ackerman, G. Anderson, and L. Söder, Distributed Generation: A Definition. Electric
Power Systems Research, Elsevier, 2001.
[4] W. Rosehart and E. Nowicki, Optimal Placement of Distributed Generation. Proceedings
of 14th Power Systems Computation Conference, June 14-28, Sevilla, pp. 1-5, 2002.
[5] B.M. Buchholz and C. Boese, The Impact of Dispersed Power Generation in Distribution
Systems. CIGRE/IEEE International Symposium, pp. 198-203, 2003.
[6] L.T. Borges and D.M. Fãlcao, Impact of Distributed Generation Allocation and Sizing on
Reliability, Losses and Voltage Profile. IEEE Power Tech Conference Proceedings, June
23-26, Bologna, 2: 5, 2003.
[7] Y.G. Hegazi, M.M.A. Salama, and A.Y. Chikhani, Adequacy Assesment of Distributed Generation Systems Using Monte Carlo Simulation. IEEE Trans. on Power Systems, vol. 18,
no. 1, pp. 48-52, February 2003.
[8] P. Chiradeja and R. Ramakumar, An Approach to Quantify the Technical Benefits of Distributed Generation. IEEE Trans. on Energy Conversion, vol. 19, no. 4, pp. 764-773, 2004.
[9] C. Wang and M.H. Nehrir, Analytical Approaches for Optimal Placement of Distributed
Generation Sources in Power Systems. IEEE Trans. on Power Systems, vol. 19, no. 4, pp.
2068-2076, November 2004.
[10] N. Mithulananthan, T. Oo, and L. Van Phu, Distributed Generator Placement in Power
Distribution System Using Genetic Algorithm to Reduce Losses. TIJSAT, 9: 55-62, 2004.
[11] T.A. Short, Electric Power Distribution Handbook. CRC Press, 2004.
80
[12] T. Gözel, M.H. Hocaoglu, U. Eminoglu, and A. Balicki, Optimal Placement and Sizing of
Distributed generation on Radial Feeder with Different Static Load Models. Proceedings of
International Conference Future Power Systems, Nov. 18, Amsterdam, pp. 2-6, 2005.
[13] M.A. Kashem, M. Negnevitsky, and G. Ledwich, Distributed Generation for Minimization
of Power Losses in Distribution Systems. Proceedings of IEEE PES General Meeting, June
18-22, Montreal, pp. 8-8, 2006.
[14] A. Barin, L. Pozzatti, L. Canha, R. Machado, A. Abaide, F. Farret, and C. Carvalho, Analysis of Multi-Objective Methods Applied to Distributed Generation Systems. IEEE International Conference on Energy and Electrical Drives, April 12-14, pp. 243-248, 2007.
[15] T. Gönen, Electric Power Distribution System Engineering. 2nd Edition, CRC Press, 2008.
[16] D. Xiaoqun, W. Jiahong, and Z. Feng, Optimal Location and Capacity of Distributed Generation Bases on Scenario Probability. IEEE International Conference on Sustainable Power Generation and Supply, April 6-7, pp. 1-5, 2009.
[17] D. Thukaram, C. Vyjayanthi, and S. Surenda, Optimal Placement of Distributed Generation for a Projected Load Increase Using Relative Electrical Distance Approach. IEEE
International Conference on Power Systems, December 27-29, pp. 1-6, 2009.
[18] A. Hadian, M.R. Haghifam, J. Zohverand, and E. Akhavan-Rezai, Probabilistic Approach
for Renewable DG Placement in Distribution Systems with Uncertain and Time Varying
Loads. IEEE PES General Meeting, Calgary, July 2009.
[19] K. Abookazemi, M.Y. Hassan, and S. Majid, A Review on Optimal Placement Methods of
Distributed Generation Sources. IEEE International Conference on Power and Energy, Nov
29 - Dec 1, Kuala Lumpur, pp. 712-716, 2010.
[20] M.F. Akorede, H. Hizam, I. Aris, and M.Z.A. Ab Kadir, A Review of Strategies for Optimal
Placement of Distributed Generation in Power Distribution Systems. Research Journal of
Applied Sciences, vol. 5, no. 2, pp. 137-145, 2010.
[21] R.C. Dugan, Reference Guide. The Open Distribution System SImulator (OpenDSS).
EPRI, 2010.
[22] J.A. Martinez, F. de León, A. Mehrizi-Sani, M.H. Nehrir, C. Wang, and V. Dinavahi, Tools
for Analysis and Design of Distributed Resources-Part II: Tools for Planning, Analysis
and Design of Distribution Networks with Distributed Resources. IEEE Trans. on Power
Delivery, vol. 26, no. 3, pp. 1653-1662, July 2011.
[23] R.C. Dugan and T.E. McDermott, An Open Source Platform for Collaborating on Smart
Grid Research. IEEE PES General Meeting, Detroit, July 2011.
81
[24] J.A. Martinez and J. Martin-Arnedo, Distribution Load Flow Calculations Using Time
Driven and Probabilistic Approaches. IEEE PES General Meeting, Detroit, July 2011.
[25] J.A. Martinez and G. Guerra, Optimum Placement of Distributed Generation in ThreePhase Distribution Systems with Time Varying Load Using a Monte Carlo Approach. Aprobado para su presentación en el IEEE PES GM a celebrarse en San Diego C.A., Julio 2012.
[26] Y.M. Atwa and E.F. El-Saadany, Probabilistic approach for Optimal Allocation of Windbased Distributed Generation in Distribution Systems. IET Renewable Power Generation,
vol. 5, no. 1, pp. 79-88, January 2011.
[27] OpenDSS
Program,
[Online]
http://sourceforge.net/projects/electricdss.
Available
through
SourceForge.net
[28] HOMER Software, National Renewable Energy Laboratory (NREL), Available at
http://www.nrel.gov/homer.
82
Màster Interuniversitari UB-UPC d’Enginyeria en Energia
Acta d’Avaluació de Projecte
Curs:
Codi UPC: 33563
Data defensa:
Qualificació:
Alumne: Luis Gerardo Guerra Sánchez
DNI: 02545885
Títol: Localización óptima de generación distribuida en sistemas de distribución
trifásicos con carga variable en el tiempo utilizando el método de Monte Carlo
Director: Juan Antonio Martínez Velasco
Director:
Ponent:
Tribunal
President:
Vocals:
Suplents:
Observacions
Signatura
Convocatòria Ordinària,
Convocatòria Extraordinària,
Cognoms, nom (President)
Cognoms, nom (President)
Cognoms, nom (Vocal)
Cognoms, nom (Vocal)
Cognoms, nom (Vocal)
Cognoms, nom (Vocal)