Control de Temperatura-Electrónica IV
Anuncio

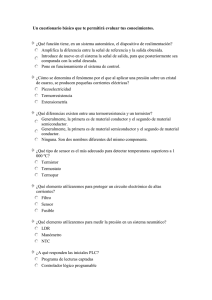
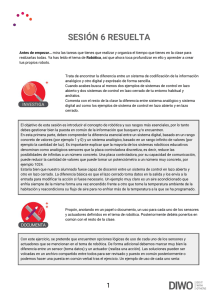
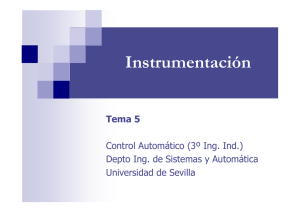
ELECTRÓNICA DE POTENCIA Electrónica IV Electrónica II A-4.32.2 E-4.30.2 CONTROL DE TEMPERATURA ING. ROBERTO GIBBONS - 2007 - -1- ELECTRÓNICA DE POTENCIA CONTROL DE TEMPERATURA A-4.32.2 Electrónica IV E-4.30.2 Electrónica II INDICE Introducción Lazo abierto Lazo cerrado Pérdidas térmicas Controles SI-NO Controles proporcionales Control por fase Control por ciclos enteros Sensores Termocuplas Celdas termovoltaicas Procesos exotérmicos Compaginación Año 2007 1 1 1 4 7 9 11 12-21 13 18 19 25 -2- Control de Temperatura Introducción El controlador de temperatura es un dispositivo mediante el cual puedo regular la temperatura de algún sistema físico tal como una pieza de algún material cualquiera o un recinto, etc. para un fin determinado. La temperatura podrá ser superior o inferior a la ambiente, para lo cual en el primer caso entregaré energía calórica y en el segundo extraeré energía calórica. Los controles podemos ubicarlos en dos grandes grupos. Lazo abierto y Lazo cerrado Lazo abierto: Se entrega una cierta cantidad de energía constante o variable para lograr una temperatura prefijada, o una variación de temperatura según una ley determinada. Cualquier variación de las condiciones del elemento a controlar, no será corregido por no disponer de un conocimiento directo de la temperatura a controlar. En estos sistemas, para que la temperatura del elemento a controlar sea el requerido, se deben mantener una cierta cantidad de parámetros de elementos periféricos en valores predeterminados, a fin de que la energía calórica entregada, produzca los efectos deseados sobre piezas a controlar. Lazo cerrado Se entrega una cierta cantidad de energía que será dependiente de la diferencia de temperatura real del elemento a controlar y de la temperatura prefijada o sea que existe una realimentación. Una forma segura y sencilla de lograr la temperatura deseada sobre el elemento, es aplicar un sensor sobre este y con los datos obtenidos, realimentar el sistema a fin de aplicar la energía calórica necesaria para lograr el resultado requerido. No siempre, podemos medir en forma directa la temperatura del elemento, por lo que en estos casos se medirá otro parámetro y a través de un modelo matemático o un simple cálculo, suponemos que tenemos el dato necesario de temperatura. Un caso podría ser el de la unión de dos metales. Si estamos efectuando una soldadura, esta será satisfactoria si la temperatura del material a soldar sería la requerida, el problema es que no hay sensor de temperatura que pueda sumergirse en el material fundido, pero esta soldadura puede ser buena si las condiciones en general son las correctas, estas pueden ser: -3Las dimensiones del material a soldar La calidad físico-químicas del material. La temperatura ambiente. El combustible usado para lograr la temperatura. La presión del gas. El diámetro del pico. Etc. Si todas las variables son conocidas, podemos variar un parámetro en función del conocimiento de la variación de otros para lograr el resultado final requerido. Si bien este caso no es el clásico caso de lazo cerrado, donde se mide en forma directa el parámetro a controlar, es una forma de control. Veamos un diagrama en bloques de un sistema de control de temperatura de lazo cerrado. Figura 1 Las funciones de los bloques son las siguientes. -4- Comparador Compara el valor de la referencia con el valor del sensor de temperatura y como resultado de la comparación, excitará el interruptor de calefacción o enfriamiento, ya sea que la temperatura del elemento sea menor o mayor respectivamente. La referencia puede ser una tensión que representa una temperatura determinada y esta podrá ser constante o seguir alguna forma de evolución en el tiempo de acuerdo a las necesidades de lo controlado. La salida del sensor de temperatura deberá ser también una tensión dependiente de la temperatura de la cámara. El comparador deberá tener una salida que según su signo, positivo o negativo, accionará el interruptor de calefacción o enfriamiento. En valores muy próximos al de referencia, no deberá tener salida porque de lo contrario, estaría permanentemente accionando el sistema de calentamiento y enfriamiento en forma alternativa convirtiéndose en un sistema oscilante en temperatura, que seguramente no es lo requerido. O sea deberá existir un entorno de temperatura en el cual no accione ninguno de los dos sistemas. (calentamiento o enfriamiento) Es evidente que esto ya nos está determinando un error en la temperatura a controlar. Si este error es mayor que el tolerable por la consigna, se deberá recurrir a algo mas elaborado. Interruptor Este bloque lo describiremos luego dado que necesitamos mas elementos para explicar las distintas formas del mismo. Calefacción. Los elementos para calentar pueden ser: • • • • • • • • • Resistencias eléctricas Vapor de agua Agua caliente Llama Energía solar Inducción magnética Campo eléctrico Semiconductores El propio elemento a controlar -5Este último se refiere a reacciones exotérmicas de origen químico, nuclear o motores de combustión interna, etc. Refrigeración • • • • • • Los elementos para enfriar pueden ser. Refrigeradores de gas (tipo familiar). Aire a temperatura ambiente. Aire enfriado. Agua a temperatura ambiente. Celdas de efecto Peltier. Cámara En este bloque estamos representando el elemento a controlar que puede ser muy variado tales como: • • • • • • • • Una cámara propiamente dicha, para colocar los elementos dentro de ella. Líquidos estáticos en un recipiente. Líquidos circulando por una tubería. Gases estáticos en un recipiente. Gases circulando por tuberías. Piezas metálicas. Mezclas químicas. Etc. Sensores de temperatura Este bloque lo describiremos mas adelante Pérdidas térmicas Representa la transferencia de energía entre el sistema a controlar y el medio ambiente o medio circundante. Esta transferencia puede ser positiva o negativa. Positiva será cuando el sistema entregue calor al medio ambiente y vice-versa. El modelo de un sistema térmico se puede representar de la siguiente manera: -6- Figura 2 Símbolo Descripción Unidad T Temperatura Grados P Potencia Vatios Ca Capacidad térmica Joules/Grado Ra Pérdidas térmicas Grados/Vatio Figura 3 -7El modelo análogo eléctrico de este sería V Tensión Voltios I Intensidad Amperes C Capacidad Faradios R Resistencia Ohms Las relaciones matemáticas serán: Térmicas Eléctricas ѳ o P = k ΔT = Donde R ѳ = 1/k – cte. de conducción térmica del horno. Logrado los valores térmicos del sistema es sencillo obtener resultados por medio de algún método analógico o digital. Los controladores de lazo cerrado los dividiremos a su vez en dos grandes grupos. a) Por todo o nada, llamados también si-no , (on-off en inglés) b) Proporcionales. -8- Controles si-no En estos controladores se compara la temperatura real con la prefijada y la energía entregada o absorbida es fija y depende del signo del error y no de la magnitud del mismo. Graficando lo dicho, para el caso de una cámara (un horno) que deseamos aumentar la temperatura por encima de la ambiente usando como calefacción una resistencia eléctrica, obtendríamos lo siguiente. Figura 4 a) sup. b) inf. -9- Tr Temperatura del alambre de la resistencia calefactora cuando esta está entregando energía y alcanzó una temperatura constante. Te Temperatura de equilibrio. Es la temperatura que alcanza el horno con toda la energía de la resistencia aplicada, hasta que esta se iguala con la energía perdida. Tp Temperatura prefijada. Es nuestra consigna Ta Temperatura ambiente Analizaremos ahora la figura 4, lo graficado en 4a es la temperatura de la resitencia calefactora y la del sensor. El elemento está a la temperatura ambiente ente to y t1, En 4b representamos la potencia entregada por la resistencia calefactora que tendrá un valor constante mientras esté conectada. Cuando ponemos en marcha el sistema la temperatura de la cámara tenderá a llegar a una temperatura que llamamos de equilibrio “Te” con una evolución que será función de la diferencia de temperatura entre la resistencia y la de la cámara. La temperatura de equilibrio es la que produce que la energía entregada a la cámara y la pérdida o radiada al exterior sean iguales. Esta evolución será asintótica a Te Cuando la temperatura de la cámara Ts (T del sensor) alcance la temperatura prefijada, Tp , el comparador manda a cortar el interruptor y dado que la resistencia calefactora comienza a perder temperatura pero aún por encima de Tp , la cámara continúa elevando su temperatura. Ts es la temperatura del sensor y sería muy dependiente de donde esté colocado en el interior de la cámara dado que la distribución calórica no es uniforme. Normalmente si no hay circulación forzada, se producirá un flujo generalmente laminar que produce diferencia de temperaturas en la cámara. Si las tolerancias son exigentes, una forma de salvar esto es con circulación forzada de tal modo que un régimen turbulento producirá una uniformidad de temperatura en todo el interior de la cámara. Cuando la resistencia calefactora entrega toda su energía posible, o sea cuando iguala su temperatura con la de la cámara, esta comienza a bajar hasta que cruza a Tp y a partir - 10 de este instante entregaremos potencia a la resistencia y luego de que esta se calienta nuevamente, la temperatura de la cámara crece y el ciclo se repite indefinidamente. Controles proporcionales En este tipo de controlador la energía entregada o adsorbida, depende de la magnitud del error, siendo este la diferencia entre la temperatura prefijada y la real. Haciendo referencia al diagrama en bloque, el interruptor cumplirá una función más específica. Del resultado de la comparación, si el signo indica que hay que calentar, el camino de la señal será el superior, en el diagrama en bloques, y la magnitud del error "dosificará" la potencia que entregará el calefactor y el diagrama de la evolución de la temperatura y potencia versus tiempo será la siguiente. Figura 5 - 11 - La potencia entregada disminuye a medida que la temperatura se acerca a la prefijada por lo tanto la temperatura del elemento calefactor disminuye de tal manera que cuando la cámara llega a la Tp es poca la energía disponible a liberar en la resistencia calefactora y por este motivo, la temperatura del conjunto subirá en menor cantidad que en el control si-no. A partir de este punto las oscilaciones serán de menor amplitud. Observemos que en el gráfico ya no tenemos Te, (temperatura de equilibrio) ya que al variar la potencia entregada, también variará la temperatura de equilibrio y por lo tanto no es posible graficarla. La asíntota de la evolución de la temperatura dentro del horno será variable en el tiempo, por lo tanto la curva es del tipo exponencial con asíntota variable. Podemos observar que con este método si bien las oscilaciones son de menor amplitud, el tiempo en llegar a la temperatura prefijada desde el momento del arranque o sea a partir de la temperatura ambiente, será mayor. Este es un inconveniente si al horno hay que apagarlo y prenderlo en períodos relativamente cortos, que sean del orden del tiempo de entrar en régimen. Con este sistema se perdería mucho tiempo de producción en espera de establecer el régimen de temperatura. Para efectuar un control que tenga las ventajas del si-no o sea llegada rápida al régimen y con oscilaciones de baja amplitud, se puede efectuar un control combinado. Se comienza con un sistema si-no pero cuando llega a un cierto porcentaje de la temperatura de régimen, comienza a operar en forma proporcional. Este punto en general es ajustable por el operador para lograr la solución de compromiso, optimizar los tiempos de tal manera de disminuir los tiempos de entrada en régimen. Este tipo de controles se llaman de banda proporcional. El control descrito es proporcional pero existen varias formas de proporcionalidad. 1) Proporcional a la integral del error. 2) Proporcional a la variación de velocidad del error. 3) Proporcional al error. El primero es el llamado control integral El segundo es llamado control por derivada - 12 El tercero es llamado control proporcional propiamente dicho. También se pueden usar combinaciones de los mismos, el mas completo, será el control llamado Proporcional Integral Derivativo, normalmente llamado P.I.D. Refiriéndonos al diagrama en bloque de la figura 1, se intercalaría un bloque a continuación del comparador que haría la siguiente función. e p = kpe + k I ∫ edt + k d de dt La función que efectúa esta ecuación, le llamaos en la figura 6, “proporc.” Figura 6 En el caso que usemos como elemento calefactor una resistencia eléctrica, este se puede controlar en un sistema de control proporcional, de dos maneras distintas. Por control de fase. Por control de ciclos enteros. Control por fase: Para este tipo de control se pueden usar triacs o tiristores según sea la potencia a manejar, dado que los triacs tienen un límite de potencia de manejo, menor que los - 13 tiristores. El ángulo de disparo es el parámetro a controlar para lograr la dosificación de potencia en función del error. Figura 7 Este método tiene la ventaja de utilizar un simple sistema de control pero su desventaja es el alto contenido armónico debido al rápido crecimiento de la corriente. En la figura se puede observar el crecimiento de la tensión en función del tiempo. Sabemos que un tiristor tiene un tiempo de encendido del orden de un micro-seg lo cual hace que la frecuencia asociada será de aprox. 1 MHz, que en alta potencia la radiación puede ser nociva a los circuitos electrónicos circundantes. Por otra parte si el equipo tiene que certificarse por alguna norma, en general todas piden Compatibilidad Electromagnética, esto es que la máxima emisión de radiaciones de distintas frecuencias, está limitada a un determinado valor. Esta norma en nuestro país es la IRAM 4220 e internacionalmente es la IEC 60601, dentro de esta, se regula la emisión electromagnética a distintas frecuencias, esto es lo que se llama “Compatibilidad Electromagnética” o EMI (del inglés ElectroMagnetic Interference). Una forma de eliminar la interferencia electromagnética es usando filtros pero resultan costosos. Por esta razón a partir de lo 5 KVatios aproximadamente es conveniente usar el sistema por ciclos enteros que a continuación describiremos. Control por ciclos enteros. También es llamado por cruce cero. En este control como su nombre lo indica, conmuta cuando la tensión tiene valor instantáneo cero y la energía entregada dependerá de la relación entre el tiempo de conducción y no conducción, tomando como base un período de varios ciclos. - 14 - Figura 8 Es análogo a un control por modulación de ancho de pulsos, donde el "pulso" es en realidad un conjunto de ciclos enteros. Los circuitos para este tipo de control son algo mas complejos que los de control por fase, aunque con los circuitos integrados específicos, o circuitos digitales programados (PIC) esta diferencia se va minimizando. Sensores. Se dividen en varios grupos Resistivos Diodos - Circuitos integrados especiales que se basan en la característica de un diodo. Termocuplas - Unión de dos metales distintos Semiconductores Termo-voltaicos Resistivos En este tipo, la resistencia varía con la variación de su temperatura, y esta variación puede ser positiva o negativa. Para las que tienen una variación positiva o sea ΔR / ΔT positiva, se llaman de coeficiente positivo de temperatura o PTC Para las que tienen una variación negativa o sea ΔR / ΔT negativa, se llaman de coeficiente negativo de temperatura o NTC - 15 m Los seensores de cooeficiente poositivo en geeneral es un metal. m popularizzados son dee platino y suu nombre es:: Los mas Termo o resistenciaas de Platin no - Pt Llamaadas tambienn RTD La leyy de variaciónn es del tipoo 0 o Pt1000 (nnombre com mercial). Estoos sensores deben d su Un tippo de RTD soon las Pt100 nombrre al hecho de d estar fabriicados de plaatino (Pt) y presentar p unna resistenciaa de 100 ohms o 1000 ohms respectivam mente a 0ºC. Son dispossitivos muy llineales en un u gran rango de temperatturas, por lo que suele exxpresarse su variación coomo:... e 0,00385/ºC C Alfa es Dondee Tª0 es una temperatura t de referenciia y R0 es la resistencia a esa temperratura. O sea que si la differencia de teemperatura ees 100 gradoos, Δ T será 100 ºC y Ro queda 1 dando o como resultado 138,5 ºC º para el caaso de la Pt 100 1 multipplicado por 1,385, Como se puede ob bservar en ell ejemplo, esstos sensoress tienen una variación dee resisteencia respectto de la tempperatura suficiente comoo para processarla con unaa electró ónica no tan exigente. Toleraancias comerrciales segúnn norma IEC C 751:1995 : Pt100 Clase A ±0,,15 ºC [ 0 ºC C] ±0,06 Ω [ 0 ºC] Pt100 Clase B ±0,,30 ºC [ 0 ºC C] ±0,12 Ω [ 0 ºC] Los seensores de cooeficiente neegativo, puedden ser de caarbón o semiiconductoress. La leyy de variaciónn es muy aliineal y es - 16 Un análisis comparativo nos mostrará las ventajas y desventajas de cada uno PTC NTC ΔR / ΔT es pequeña ΔR / ΔT es grande ΔR / ΔT es una ley de primer orden ΔR / ΔT es una ley exponencial Ro tiene garantizada una Ro tiene variaciones de elemento tolerancia baja < 1 % a elemento. Temp. máx. Aprox 600 oC Temp. máx. Aprox 200 oC Alto costo (Aprox. 20 US$) Bajo costo (Aprox. 2 US$) NTC Es obvio que la mayor variación de ΔR / ΔT requiere menos exigencia en los circuitos electrónicos que procesan esta señal. PTC Una ley de variación de primer orden, significa que podemos hacer una relación directa entre la resistencia y la temperatura, siendo la electrónica para esto relativamente simple. NTC Una ley exponencial requiere un procesamiento electrónico importante para linealizar la lectura. PTC Debido a la baja dispersión de valores es muy ventajoso en los procesos de fabricación debido no requiere calibración y en el cambio futuro, no requiere recalibración. Hay que pensar que dado que este sensor está expuesto a cambios de temperatura, su vida útil es limitada, y el recambio será necesario en algún momento. - 17 En los PTC específicamente las resistencias son de Platino de 100 Ohms a 0 grado centígrado, están muy popularizadas y se llaman en el mercado Pt 100, son de fácil obtención y se fabrican en varios tamaños, adaptándose prácticamente a casi todos los usos requeridos. NTC Debido a su dispersión, hace falta calibrar cada vez que se cambia. PTC Su rango de temperatura de trabajo es muy amplio comparado con los NTC. PTC Su costo es mucho mas elevado que el NTC, pero en la mayoría de los casos es justificable. Esto es principalmente en la industria o donde la precisión de temperatura puede ocasionar riesgos. Además hay que tener en cuenta la diferencia de costo del procesador electrónico que para el PTC es menos costoso que para el NTC, lo cual si bien no compensa económicamente, la diferencia es algo menor. En equipos de bajo costo como puede ser un electrodoméstico, es posible que no se pueda justificar, debido a la alta competitividad entre marcas. Se debe tener en cuenta que para medir la resistencia del sensor, debe circular corriente por este, con lo cual se producirá un calentamiento por sobre la temperatura del ambiente donde está midiendo. Esta corriente deberá ser la menor posible, y en la medida que exijamos menor sobreelevación de temperatura, mayor será la exigencia del circuito electrónico de medición. - 18 Un circuito clásico de uso de un sensor tipo Pt es el siguiente: Figura 9 En este circuito, IL = Vi / R por lo tanto cuando varía Rt, varía Vo manteniendo cte. IL y Vo = f(T) Diodos Los diodos se pueden usar como sensores de temperatura, aprovechando su característica Tensión-Corriente: Vγ = Vo e kt La variación ΔV/ ΔT, es la misma para distintos diodos de la misma serie, pero el Vo no, por lo que el intercambio en un circuito, requiere calibración. Existen circuitos integrados elaborados, que aprovechando esta característica de los diodos y un circuito adicional, tienen una tensión de salida proporcional a la temperatura, un caso particular es x mV / ºC, estos ya son calibrados y por lo tanto intercambiables sin calibración adicional. - 19 - Termocuplas Estos elementos están basados en el efecto Seebeck, que dice que cuando dos metales de distintas características se unen en un extremo, si se produce una diferencia de temperatura entre ambos extremos, se produce una diferencia de potencial entre los dos metales en el extremo no unido. En el uso industrial, la disposición es la siguiente: Figura 10 Dado que la diferencia de potencial, depende de la diferencia de temperatura y no de la temperatura absoluta, para calcular la temperatura, debemos saber la temperatura del extremo “frío” , la cual se puede obtener con uno de los métodos que nos da la temperatura en forma directa. A este efecto, en un instrumento de medición se lo llama “compensación de junta fría”. Otra forma mas simple es no usar la compensación de junta fría, pero se debe calibrar el instrumento a una temperatura ambiente determinada y una tabla para que el usuario corrija por la variación entre la temperatura de calibración del fabricante y la ambiente en el momento de la medición. Estos elementos se pueden construir de pequeño tamaño y dado que son metálicos, o sea buena conducción de la temperatura, se logra una buena respuesta en el tiempo, debido a la baja inercia térmica. Esta propiedad es importante cuando se debe sensar temperaturas que varían en el tiempo y se quiere el mínimo error en el “seguimiento” de la temperatura, lo cual se da muy a menudo en instrumentos químicos. Los pares de metales usados ya están muy estudiados y actualmente hay pares estandarizados. Cada uno de estos, tiene una característica distinta de diferencia de potencial en función de la diferencia de temperatura. Hay pares que producen una tensión alta pero el rango de temperatura es bajo y otros vice-versa. Es obvio que cuando mayor es la diferencia de potencial, menor es la exigencia de la electrónica, y por lo tanto menos costoso el instrumento. O sea que cada instrumento se elije de acuerdo al rango que se va a usar para no aumentar el costo inútilmente. - 20 - La tabla siguiente muestra los rangos aproximados de temperatura y el par de metal usado. Además se nombra con una letra que ya es un protocolo internacional. Esto es debido a que en general los fabricantes de instrumentos no fabrican la termocupla, o sea que se puede adquirir por una parte el instrumento para una termocupla determinada y por otra parte la termocupla acorde al instrumento elegido. Rango de Temperatura 0-400 0-700 0 -1200 200- 1700 Par de metales Tipo Cu –Constantan Fe –Constatntan Cr – Alumel Pt – Pt Rh T J K S Cu - Cobre Fe - Hierro Cr - Cromo Pt - Platino Rh – Rodio Constantan: Aleación Alumel: Aleación Celdas Termovoltaicas Este elemento es un semiconductor que genera una tensión en función de la temperatura que recibe por radiación. La ventaja de este elemento es que no necesita contacto directo con el elemento o medio a medir su temperatura. El uso es similar al de cualquier semiconductor, se debe disponer de la hoja de características y en función de esta se efectúa el diseño. El uso de instrumentos con estos sensores, es para elementos en movimiento. Un caso en la industria del automóvil, mas precisamente en la de los neumáticos, es medir la temperatura en el ancho de la banda de rodamiento. Otra aplicación es el control permanente de la temperatura de los rodamientos de motores, donde un sensor de apoyo no es posible por circunstancias tales como vibraciones, ambiente químicamente agresivo, etc. Otra aplicación es la medida de elementos que tienen alta tensión, tal el caso de las uniones en torres de alta tensión en transmisión de energía. Periódicamente de deben controlar estas uniones y se pueden hacer con seguridad, “desde abajo”. En la Figura 1, cuando efectuamos la descripción de cada bloque, dijimos efectuar la descripción del “Interruptor” mas adelante. - 21 Comenzaremos por un circuito básico. Figura 11 Ref., es la resistencia para seleccionar la temperatura del sistema. RPTC es el sensor que no es más que una resistencia metálica colocada en el lugar a controlar la temperatura. El funcionamiento, analizando la figura 12, es el siguiente: Figura 12 - 22 El Diodo Zener en combinación con la resistencia R1, opera como un circuito de enclavamiento de la tensión del rectificador de onda completa. O sea que en el cátodo del Zener tendremos una tensión trapezoidal, derivada de una senoidal enclavada a la tensión de Zener. Cada vez de la tensión de alimentación pasa por cero, el circuito toma las condiciones iniciales, o sea cada 10 mseg. se repite el ciclo. El T.U.P. (transistor uni-juntura programable) trabaja como oscilador de relajación. La tensión sobre R2 depende de la tensión de enclavamiento y del divisor formado por las resistencias R2 y Ref. La tensión sobre C será una exponencial cuya cte. de tiempo es RPTC C que comienza desde cero voltios y tiene como asíntota la tensión de enclavamiento. Cuando la tensión sobre el condensador C alcanza la tensión sobre R2, mas una tensión Vγ, el transistor se dispara y produce un pulso de tensión sobre el primario del transformador TR1, cuyo secundario está aplicado a la compuerta del triac Th1. El tiristor conducirá durante el resto del semiciclo y se apagará cuando la tensión de línea pase por cero. En algún momento el sistema entrará en equilibrio, esto se producirá cuando la energía entregada al sistema sea igual a la energía perdida del este hacia el ambiente debido a su diferencia de temperatura. Si a partir del sistema en equilibrio, la temperatura baja, la resistencia de la RPTC disminuye por lo que la cte. de tiempo RPTC C crece mas rápido y hace que dispare el tiristor antes, por lo tanto se entregará mas energía al sistema y se retoma la temperatura de equilibrio. Se debe observar que si la temperatura de equilibrio se produce a los 90º o próximo al principio o final de ciclo la compensación de temperatura será en diferente tiempo. Cuando la temperatura está en equilibrio y el disparo próximo a los 90º, para un ΔT negativo, se producirá un adelanto del ángulo de disparo en un valor Δt . Este ΔT por la tensión instantánea de la alimentación, producirá un ΔE. Si la temperatura de equilibrio se produce con un ángulo de disparo próximo al los cero grados, el mismo ΔT que el anterior pero por una tensión instantánea de línea menor, producirá un ΔΕ menor que en el caso anterior y la recuperación tomará mayor tiempo. Esto es importante cuando se requiere alta precisión de recuperación de temperatura o sea alta repetibilidad. O sea que cuando la línea de alimentación senoidal es la que entrega energía a la resistencia de calentamiento, se debe aumentar el Δϕ para un mismo ΔT cuando el equilibrio está mas cerca de los cruces cero. Control por ciclos enteros Cuando la potencia de calefacción aumenta, ya no es conveniente usar control por fase, ya que cuando se produce la conmutación, si esta está próximo a los 90º, los armónicos introducidos en la línea y al aire son importantes. En la práctica esta potencia es aproximadamente del orden de los 5 KWatt. El control por ciclos enteros lo que hace es conmutar cuando es sistema lo indica pero el triac o tiristor conmuta en el cruce cero siguiente, o sea que puede tener un retraso de - 23 un máximo de 10 mseg. para el caso de redes de 50 Hz. que en general no afecta, pero de todos modos el sistema de realimentación compensará automáticamente en el siguiente ciclo de calefacción. Ya que a para 5 Kwatt o mas las resistencia son de alambre grueso, el ripple térmico será menor y no es tan importante. Cuanto mas semi-ciclos de línea tenga el ciclo de trabajo mayor será la precisión pero mayor será también el ripple térmico. O sea que habrá que buscar la solución de compromiso mas adecuada para cada caso. Una configuración sería la siguiente: Figura 13 Hemos visto hasta aquí, circuitos calentados con resistencias eléctricas, pero habíamos comentado que también hay otras fuentes de energía y esta puede ser vapor. En este caso usaremos el vapor como si fuese la línea de alimentación en el caso eléctrico. Lo que debemos hacer es controlar el flujo de vapor. Se fabrican válvulas de vapor de distintas características, que dependerá del caudal a usar, presión, temperatura, velocidad, etc. - 24 El control hará que la válvula permita el paso en mas o menos cantidad. Estas válvulas se controlan con corriente que en general es entre 4 y 20 mA. para abierta y cerrada. Se pueden configurar para que 4 mA. corresponda a cerrada y 20 mA. a abierta o vice-versa. Figura 14 Este tipo de control por válvulas 4-20 mA tiene la ventaja de la corriente cambia su valor aunque la válvula esté lejos del control, en una industria esta distancia puede ser varios miles de metros. Por otra parte si la corriente es cero significa que el cable está cortado. De esta manera con solo dos conductores, podemos controlar la corriente y a la vez verificar que los conductores de control estén presentes. - 25 - Procesos Exotérmicos Existen casos de ciertos procesos industriales, en que la temperatura del proceso es mayor que la temperatura ambiente, y se le debe extraer calor al sistema para estabilizar la temperatura en el valor requerido. El elemento para extraer el calor puede ser simplemente agua a temperatura ambiente. Para esto se usa un sistema que puede ser el siguiente. Figura 15 Este tipo de proceso es clásico en la industria química donde se efectúan mezclas que reaccionan liberando calor y la temperatura no debe pasar de un cierto valor. Otro caso típico son las reacciones nucleares, las que se producen para generar calor. En este caso el agua que refrigera usa esta energía tomada de la reacción para a su vez convertirla en energía de rotación a través de turbinas acopladas a generadores eléctricos. En este caso además de la circulación de agua, existe otro control que regula la reacción atómica a través de elementos retardadores de la reacción. Los motores de combustión interna de todos los vehículos particulares, de transporte, etc. usan un sistema similar pero el intercambiador es un radiador al aire. La regulación se efectúa por un sistema mecánico llamado termostato. Este tiene el inconveniente que - 26 abre o cierra el paso de agua en función de la temperatura, pero la bomba de agua siempre está absorbiendo energía del motor, dado está acoplada mecánicamente, reduciendo el rendimiento cundo no es necesaria refrigerar. En los nuevos vehículos de alta gama ya se usan, y en un futuro muy cercano de quizás un par de años mas, se usarán bombas de agua externa, impulsada por un motor eléctrico y el caudal será regulado electrónicamente a través de sensores en el circuito de agua. De eta manera cuando la condiciones climáticas, combinadas con la forma de usar el vehículo, si no se requiere refrigeración forzada, el motor eléctrico para o baja la velocidad, no desperdiciando potencia.