Capítulo 3
Anuncio

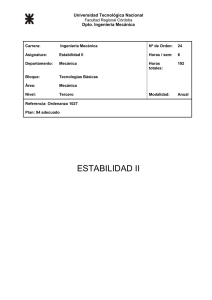
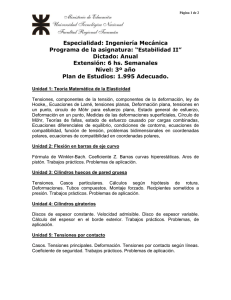
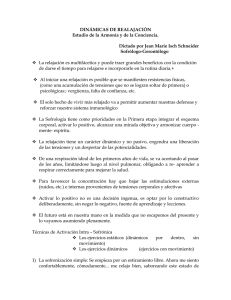
Capítulo 3 Propiedades Mecánicas 3.1. Viscoelásticidad La mayoría de los materiales biológicos, muchos polímeros y casi todos los metales a alta temperatura tienen propiedades que dependen de la historia temporal de carga, incluida la velocidad de carga. Si dicho comportamiento dependiente del tiempo no involucra daño irreversible en el material, se dice que el material exhibe un comportamiento viscoelástico. La parte viscosa del comportamiento se re ere al hecho de que las tensiones dependen de la velocidad de deformación (al igual que en un uido newtoniano) y la componente elástica a que también dependen de la propia deformación (como en un muelle hookeano). La viscoelasticidad se mani esta de diversas formas, siendo la principal que las propiedades del material dependen de la velocidad a la que se aplica la carga y en concreto que la curva tensión-deformación depende de la velocidad de deformación (ver gura 3-1 (a)). Por lo general, la rigidez y la resistencia aumentan al aumentar la velocidad de aplicación de las cargas. Otra característica de la viscoelasticidad es el fenómeno de histéresis, por el que la trayectoria de la curva tensión-deformación en descarga está por debajo de la correspondiente a la carga (ver gura 3-1(b)). La curva tensión-deformación forma un ciclo que se denomina lazo o ciclo de histéresis, cuyo área representa la energía mecánica disipada en un ciclo de carga-descarga. La tercera manifestación del comportamiento viscoelástico es la existencia del fenómeno de creep y su contrapartida, la relajación de tensiones, que se estudian en el epígrafe siguiente. 15 16 Propiedades Mecánicas Figura 3-1: (a) Dependencia de la curva histéresis 3.2. " con la velocidad de deformación, (b) Ciclo de Ensayos de creep y relajación de tensiones Creep designa al fenómeno por el cuál un material continua deformándose con el tiempo cuando se le aplica una tensión constante. Relajación de tensiones describe el fenómeno inverso: cómo, al aplicar una deformación constante a un material, la tensión a la que se encuentra sometido disminuye con el tiempo. Una representación típica de lo que ocurre en ambos casos se muestra en la gura 3-2. Ensayos como los descritos en la gura 3-2, denominados respectivamente ensayos de creep y relajación de tensiones son muy utilizados para caracterizar el comportamiento del material viscoelástico. En un ensayo de relajación de tensiones ideal la deformación se aplica en forma de escalón, esto implica que durante un intervalo in nitesimal la velocidad de deformación es in nita. A la evolución temporal de las tensiones en este ensayo con deformación unitaria se le denomina función de relajación y se suele designar por G(t). En el ensayo de creep ideal, por el contrario, es la tensión la que se aplica en forma de escalón. Si la tensión es unitaria la evolución temporal de las deformaciones se designa por J(t) y se denomina función de creep. Para el caso concreto del disco de la ATM, al realizarle un ensayo de relajación de tensiones, más del 50 % de la tensión inicial es disipada ( [29], [30], [31]). Este comportamiento implica que el disco funcione como un absorbente y distribuidor de la tensión en el material. Sin la disipación de la energía de deformación, el almacenamiento excesivo de energía puede llevar a la rotura del 17 3.3 Modelos de comportamiento viscoelástico Figura 3-2: Ensayo de creep y relajación de tensiones. disco y de otras partes de la articulación. 3.3. 3.3.1. Modelos de comportamiento viscoelástico Comportamiento viscoelástico lineal La función de creep, J(t), es la evolución temporal de la deformación de un sistema inicialmente libre de tensiones y deformaciones sometido a una tensión unitaria aplicada en forma de escalón, (t) = u(t), donde u(t) representa la función escalón de Heaviside. La hipótesis de viscoelasticidad lineal asume que si se aplica una tensión escalón de mayor intensidad, la respuesta (deformación) es proporcional a J(t), siendo el valor de la tensión la constante de proporcionalidad. Si ahora se supone que la tensión aplicada es como la que muestra la gura 3-3 (a), la deformación será: "(t) = 0 J(t) + 1 J(t t1 ) + 2 J(t t2 ) + 3 J(t t3 ) = 3 X i J(t ti ) (3.1) i=0 Si ahora lo que se tiene es una evolución continua de las tensiones, el sumatorio se convierte en una integral, considerando que en el instante , y durante el incremento de tiempo d ocurre un incremento diferencial de tensión d = (d=d )d , que se puede considerar de manera aproximada como aplicado en forma de escalón. Si se tiene en cuenta la evolución continua de las 18 Propiedades Mecánicas tensiones, el sumatorio de (3.1) se sustituye por una integral. "(t) = t Z J(t ) 1 d( ) d d (3.2) Figura 3-3: Aplicación del principio de superposición. De manera análoga, si se controla en deformación (es conocida "(t)) la evolución de las tensiones se conoce a través de la función de relajación de tensiones. (t) = t Z G(t ) 1 d"( ) d d (3.3) A las integrales de convolución anteriores se les conoce como integrales de Bolztmann o integrales hereditarias y ponen de mani esto la linealidad que se ha supuesto para el material. Permiten calcular la evolución de las tensiones (deformaciones) ante una historia de deformación (tensión) aplicada cualquiera, distinta a la del ensayo de relajación (creep). Si se supone que el material estaba inicialmente libre de tensiones y deformaciones se puede cambiar el límite de integración inferior. (t) = Z 0 t G(t ) d"( ) d d (3.4) El ensayo de relajación de tensiones es más habitual que el ensayo de creep, por ello es más normal estimar una función G(t) para el material en lugar de J(t). Si en la ecuación (3.1) se integra por partes y se supone que el espécimen estaba libre de deformaciones ("( 1) = 0) se 19 3.3 Modelos de comportamiento viscoelástico llega a la siguiente expresión equivalente a (3.1) (t) = G(0) "(t) + 1 Z "( ) 0 dG( ) d d (3.5) Si el sólido estaba libre de deformaciones antes de empezar el ensayo ("(t) = 0 8 t < 0) los límites de integración se pueden reducir, quedando: (t) = G(0) "(t) + Z t "( ) 0 dG( ) d d (3.6) El comportamiento de materiales viscoelásticos es bastante complejo, incluso haciendo la suposición de viscoelasticidad lineal. Por ello se han desarrollado una serie de modelos sencillos que permiten describir desde un punto de vista fenomenológico la dependencia con el tiempo de las ecuaciones constitutivas del material. En estos modelos el material se describe como un conjunto de muelles lineales (hookeanos) en los que se cumple = E ", con E la rigidez del muelle, que se puede interpretar como un módulo elástico del material, y amortiguadores viscosos en los que se cumple = "_ , donde es una constante. Los modelos más usuales se muestran en la gura 3-4. Los modelos de Maxwell y de Voingt consisten en sólo dos elementos, un amortiguador y un resorte. En el caso de Maxwell los elementos se sitúan en serie mientras que en el modelo de Voingt trabajan en paralelo.Como combinación de los anteriores aparece el modelo de Maxwell generalizado que por su mayor interés se expone con más detalle a continuación. Modelo de Maxwell generalizado El modelo de Maxwell generalizado presentado aquí y que se muestra en la gura 3-4 (c) se denomina de un grado de libertad. Si se quieren modelar comportamientos más complejos se pueden añadir elementos de Maxwell en paralelo con el ya existente, resultando un modelo como el mostrado en la gura 3-5, de n grados de libertad. La ecuación que rige el comportamiento de este sólido es: _ + que también se suele escribir: E1 E1 E1 = (E1 + E1 ) "_ + " 1 1 (3.7) 20 Propiedades Mecánicas Figura 3-4: Función de creep y relajación de los modelos de a)Maxwell, b) Voingt, y c) Kelvin. Figura 3-5: Modelo de Maxwell generalizado de n grados de libertad. 21 3.3 Modelos de comportamiento viscoelástico " _ + = E1 ( "_ + ") donde " = (3.8) 1 E1 . y = " 1 + E1 E1 Para evaluar la función de relajación de este modelo se aplica una deformación ", que será la misma sobre cada unidad en paralelo. La tensión será la suma de las tensiones en cada unidad. Sabiendo que la función de relajación para cada unidad de Maxwell tiene la forma: G(t) = E1 e t= 1 (3.9) podemos escribir la ecuación que de ne la tensión para el modelo de Maxwell generalizado como: (t) = 1 + n X i = E1 " + i=1 n X Ei e t= i " (3.10) i=1 La función de relajación es la respuesta de tensiones cuando " = u(t), por tanto: G(t) = E1 + n X Ei e t= i (3.11) i=1 Los sumatorios del tipo que aparece en la ecuación 3.11 se conocen como series de Prony y se usan muy frecuentemente para ajustar funciones de relajación experimentales. Cuando se quieren ajustar funciones de creep es más usual emplear un modelo de Kelvin-Voigt generalizado. 3.3.2. Comportamiento viscoelástico cuasi-lineal Esta teoría fue desarrollada por Fung [13] y supone una pequeña modi cación del concepto de viscoelasticidad lineal para incluir relaciones tensión-deformación no lineales y aplicable por tanto en teoría de grandes desplazamientos y deformaciones. La respuesta de tensiones ante una deformación en escalón, en este caso una tal que produce un alargamiento , se escribe como: (; t) = G(t) T e () (3.12) 22 Propiedades Mecánicas donde G(t) es la función de relajación reducida, que ahora es una función adimensional, normalizada de tal modo que G(0) = 1. Por ello, la función T e (), denominada función de respuesta elástica, tiene dimensiones de tensión y representa la tensión instantánea que aparece al aplicar un alargamiento escalón , es decir: T e () = (; 0) (3.13) En este modelo se mantiene la hipótesis de linealidad, en el sentido de que es aplicable el principio de superposición y por tanto ante un evolución temporal del alargamiento (t) la evolución de las tensiones será: (t) = Z t G(t ) 1 dT e [( )] d d (3.14) Si se aplica la regla de la cadena a la derivación y se considera que el material está inicialmente libre de tensiones y deformaciones, la ecuación queda de la siguiente manera: (t) = Z t G(t ) 0 dT e [( )] d( ) d d d (3.15) Como ya se hizo en la sección 3.3.1, la integral anterior se puede reescribir de la siguiente forma: e (t) = T [(t)] + Z t T e [(t )] 0 dG( ) d d (3.16) que presenta algunas ventajas para la caracterización experimental del comportamiento viscoelástico, como se verá más adelante. La no linealidad se introduce en el modelo a través de la función T e (), que relaciona las tensiones con los alargamientos y que sustituye a la deformación en la ecuación 3.4. Para gomas y muchos materiales biológicos es usual emplear un modelo de comportamiento hiperelástico de Mooney-Rivlin cuando la carga es cuasi-estática y no hay que considerar efectos viscosos. Cuando sí es necesario considerarlos la opción más clara es usar dicho modelo de Mooney-Rivlin para de nir T e (). La función de densidad de energía de deformación en un material de este tipo, y supuesto incompresible, es: = c10 (I1 3) + c01 (I2 3) (3.17) donde c10 y c01 son constantes del material e I1 e I2 son los invariantes primero y segundo 23 3.3 Modelos de comportamiento viscoelástico del tensor de Cauchy-Green por la derecha, respectivamente. La tensión que hay que aplicar en un ensayo de tracción-compresión uniaxial en un material de este tipo para conseguir un alargamiento se usa como valor de T e () y se demuestra que vale: e T () = 2 c10 3.3.3. 2 1 + 2 c01 1 2 (3.18) Modelo desarrollado en el trabajo El disco de la articulación temporomandibular es un cartílago sometido, principalmente, a compresión que actúa como almohadilla entre el cóndilo de la mandíbula y el temporal. El modelo QLV es fácilmente ajustable cuando el caso de carga es sencillo, ya que la expresión que describe el comportamiento del material es cerrada. El modelo QLV, a pesar de ser unidimensional y no tener en cuenta la anisotropía del material, presenta una importante ventaja, y es que es posible, obtener a partir de ensayos relativamente simples, la función que describe al material. Este modelo ha sido utilizado previamente para describir el comportamiento de válvulas aórticas en cerdos por Carew et al. [14], pero en este trabajo se utilizará una respuesta elástica que tenga en cuenta la no linealidad. El ensayo más habitual para caracterizar el comportamiento viscoelástico de un material es el ensayo de relajación de tensiones. Pero la realización práctica de este ensayo tiene un grave inconveniente y es la di cultad de aplicar una deformación en forma de escalón. Conceptualmente es imposible realizar un ensayo de ese tipo, porque no se puede aplicar una velocidad de deformación in nita. Para paliar esto se suele aproximar el incremento instantáneo de deformación por una rampa con una velocidad de deformación alta (ver gura 3-6) Pero existe un problema a la hora de elegir dicha velocidad: no puede ser excesivamente alta, porque se pueden inducir ondas de tensión en el material que distorsionen los resultados, ni demasiado baja, que no se pueda considerar una aproximación su cientemente buena de la función escalón. En el presente trabajo se ha usado el modelo de Mooney-Rivlin para de nir la función de respuesta elástica T e (). En este modelo, la tensión que hay que aplicar en un ensayo de traccióncompresión uniaxial para conseguir un alargamiento , viene dada por la ecuación 3.18, mientras que para ajustar G(t)se propone una serie de Prony de 2 grados de libertad: G(t) = E1 + E1 e t= 1 + E2 e t= 2 (3.19) 24 Propiedades Mecánicas Figura 3-6: Esquema de ensayo de relajación de tensiones Que se normaliza así: G(t) = g1 + g1 e G(0) t= 2 (3.20) E1 E2 ; g2 = E1 + E1 + E 2 E1 + E1 + E 2 (3.21) G(t) = t= 1 + g2 e Por ende: g1 = En lo que sigue se explica el método iterativo usado en el presente trabajo para ajustar tanto e T () como G(t) de un ensayo como el indicado en la gura 3-6. Paso 1. La respuesta en relajación que corresponde a la zona 1 de la gura 3-6, es decir, la tensión para t > t0 se modela con una serie de Prony de 2 grados de libertad. En este paso inicial se hace la suposición de que la carga se aplica en escalón. Si partimos de la ecuación 3.12 y sustituimos el valor de G(t) de nido en 3.20, tenemos que: (0 ; t) = g1 T e (0 ) + g1 T e (0 ) e t= 1 + g2 T e (0 ) e t= 2 (3.22) Como T e (0 ) corresponde a (0 ; t0 ) es conocido con el registro de tensiones del ensayo ya 25 3.3 Modelos de comportamiento viscoelástico que es la tensión pico del registro de respuesta. Entonces, las tensiones pueden reescribirse como: (t) = 1 + A1 e t= 1 + A2 e t= 2 (3.23) donde 1 = g1 T e (0 ) (3.24) A1 = g1 T e (0 ) (3.25) A2 = g2 T e (0 ) (3.26) Por tanto, ajustando 3.23 con mínimos cuadrados al registro de tensiones del ensayo para t > t0 , obtenemos 1 , A1 , 1 , A2 , 2 . Como conocemos T e (0 ), sustituyendo en las ecuaciones 3.24, 3.25 y 3.26 podemos obtener g1 y g2 que junto con g1 , 1 y 2 son las contantes que se usan en el siguiente paso. Paso 2. En este paso, se analiza la rampa de carga del ensayo para determinar las constantes de Mooney-Rivlin. El alargamiento, , está dado por: (t) = 1 + e(t) = 1 + v t L (3.27) siendo e(t) la deformación, v la velocidad de carga (en este caso de compresión), L el espesor del espécimen y t, el tiempo. Teniendo en cuenta las ecuaciones 3.16 y 3.18, las tensiones pueden escribirse: (t) = 2 c10 2 (t) Z 0 t 1 (t) 2 [2 c10 (t ) + 2 c01 (t) 1 (t ) 1 + 2 (t) + 2 c01 (t ) (3.28) 1 0 ]G ( )d 2 (t ) 0 Las constantes,g1 , g2 , 1 , y 2 , obtenidas en el paso 1 se sutituyen en G (t). De esta forma ya se puede ajustar por medio de mínimos cuadrados las tensiones dadas por 3.28 al registro de tensiones del ensayo en el intervalo [0; t0 ]. De este ajuste se ontienen los valores de las constantes c10 y c01 . Matemáticamente es posible obtener unos valores negativos de las constantes c10 y c01 pero analiticamente no es un resultado viable para nuestro trabajo, por ello, si se obtiene un 26 Propiedades Mecánicas resultado negativo de dichas constantes hay que añadir en este paso un método de penalización interior para restringir los valores de c10 y c01 : Paso 3 Finalmente, considerando el registro de respuesta completo se ajusta de nuevo la función G(t) ahora teniendo en cuenta que la rampa tiene velocidad nita. En este caso es necesario particularizar la ecuación 3.15 para t > t0 y al hacer esto se divide la ecuación en dos. (t) = Z t0 G(t ) 0 dT e [( )] d( ) d + d d Z t G(t ) t0 dT e [( )] d( ) d d d (3.29) Para t > t0 ; es constate en el tiempo, y por tanto su derivada con respecto de es nula, quedando la ecuación 3.29 como: (t) = Z t0 G(t ) 0 dT e [( )] d( ) d d d (3.30) Operando se obtiene: (t) = Z 0 t0 [ g1 + g1 e (t )= 1 + g2 e (t )= 2 2 c10 1 2 + 2 + (3.31) 2 v +2 c01 1 + 3 ]d L Para el ajuste de G se parte de los valores iniciales ,g1 , g2 y g1 obtenidos en el paso 1 mientras que para de nir 1 , y 2 iniciales se implementa en el algoritmo una cuadrícula de valores para de esta forma reducir el tiempo de cálculo y garantizar la obtención del mejor resultado sin verse condicionado por el valor inicial impuesto. El algoritmo recorre la cuadricula y mediante mínimos cuadrados se ajusta la respuesta de tensiones al registro completo hasta obtener el valor que mejor R2 proporcione. Se calculan así las constantes de Prony correspondientes a G: Paso 4. Este paso es igual al paso 2, tomando como valores iniciales los obtenidos en el paso 3. Paso 5. Aquí volvemos ajustar la curva completa al igual que hicimos en el paso 3 pero esta vez sin necesidad de usar una cuadrícula para los valores iniciales de 1 , y 2 . Una vez terminado el ajuste, cálculamos el error cuadrático medio (ECM) como: 27 3.3 Modelos de comportamiento viscoelástico v u n uX ( Calculada (ti ) ECM = t 2 Experimental (ti )) n i=1 (3.32) siendo n el número de puntos del registro completo. El criterio para nalizar el proceso iterativo en este paso, esta basado en el porcentaje de ECM respecto a la media de las tensiones, de forma que éste no debe superar una tolerancia impuesta de 5 10 4 . En caso contrario, se procede a realizar un paso 6 y 7 iguales a los pasos 4 y 5 descritos anteriormente. A la nalización del paso 7 se vuelve a comparar el porcentaje de ECM con la tolerancia impuesta, si cumple el requisito, se naliza el proceso sino se compara la Calculada en 7 con la Calculada en 5 de forma que si no presenta diferencias apreciables (T OL = 1 10 8 ) podríamos tomar el ajuste de 7 como el de nitivo ya que queda demostrado que el ajuste no mejorará con más iteraciones. Si Calculada en 7 no es su cientemente parecida a Calculada en 5, entonces se continua el algoritmo hasta que alguna de las condiciones impuestas anteriormente se cumpla. Sin embargo, a pesar de ser un buen proceso iterativo, hay un problema al ajustar funciones del tipo de las series de Prony, que pone de mani esto Lanczos [32] y es el hecho de que pueden existir distintos conjuntos de valores i , Ei que aproximen igualmente bien una determinada función de relajación. Este autor comprobó que en un cierto experimento las curvas de decaimiento, similares a las funciones de relajación, podían ser ajustadas igualmente bien por estas tres funciones en el rango x 2 [0; 1]. f (x) = 2;202 e f (x) = 0;0951 e f (x) = 0;041 e 4;45x x + 0;305 e + 0;8607 e 0;5x + 0;79 e 1;58x 3x + 1;5576 e 2;73x + 1;68 e 5x (3.33) 4;96x Como se ve, los exponentes y coe cientes son bien distintos en cada caso. Esto exige mucha cautela a la hora de resolver el problema de mínimos cuadrados. Si se resuelve por el método de Newton-Raphson hay que ser muy cuidadoso con la elección del estimado inicial. Para comprobar la convergencia no se puede hacer directamente con los valores de las constantes, i y (i) Ei , sino comparar las funciones G (t) y G (i 1) (t). En cualquier caso, como comprobación nal, es conveniente probar que el modelo de respuesta (QLV) obtenido ajusta bien la respuesta experimental y si es así, podemos asegurar que al menos una carga como la del ensayo puede ser razonablemente aproximada por nuestro modelo, aunque ello no asegura, por lo general, que se modelen bien otros tipos de carga. 28 Propiedades Mecánicas Otro problema bien distinto es el tratamiento estadístico de las constantes de la serie de Prony obtenidas en una batería de ensayos. Puesto que los valores ajustados de i y Ei pueden ser muy diferentes para diferentes especímenes aunque el comportamiento viscoelástico sea parecido, es complicado obtener medias muestrales de dichas constantes que sean representativas de la población.