Pulse aquí para obtener el archivo - OCW Usal
Anuncio

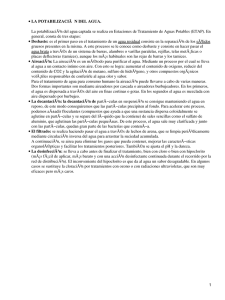
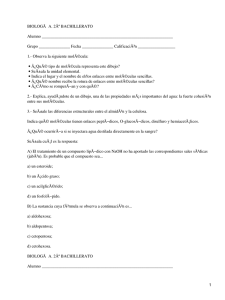
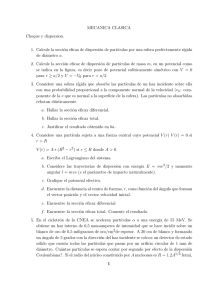
Fı́sica I. Curso 2010/11 Departamento de Fı́sica Aplicada. ETSII de Béjar. Universidad de Salamanca Profs. Alejandro Medina Domı́nguez y Jesús Ovejero Sánchez Tema 4. Sistemas de partı́culas Índice 1. Introducción 3 2. Centro de masas 3 2.1. Definición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2.2. Movimiento del centro de masas . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 3. Momento lineal 7 3.1. Definición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 3.2. Conservación del momento lineal . . . . . . . . . . . . . . . . . . . . . . . . . . 8 4. Colisiones 4.1. Colisiones elásticas en una dimensión . . . . . . . . . . . . . . . . . . . . . . . . 8 9 4.2. Colisiones inelásticas en una dimensión . . . . . . . . . . . . . . . . . . . . . . . 11 5. Problemas 13 Índice alfabético 17 Tema 4. Sistemas de partı́culas 2 3 Tema 4. Sistemas de partı́culas 1. Introducción Hasta ahora hemos considerado la cinemática y la dinámica de partı́culas individuales. Nues- tro objetivo ahora se centra en sistemas formados por varias partı́culas. Estos sistemas pueden ser continuos o discretos, dependiendo del número y distancia relativa entre las partı́culas que los componen. Veremos cómo en los dos casos la dinámica del sistema se puede describir a partir de las leyes de Newton, pero introduciendo algunos conceptos nuevos como los de centro de masas y momento lineal. 2. Centro de masas 2.1. Definición Se define el centro de masas de un sistema discreto de partı́culas como: ~rcm n 1 X mi~ri , = M i=1 donde M es la masa total del sistema: M = n X mi . De algún modo este punto representa la i=1 posición en promedio de la masa del sistema. El motivo de su definición lo entenderemos a posteriori, cuando demostremos que el centro de masas de un sistema, se comporta en cuanto a su movimiento de traslación como si en él estuviese concentrada toda su masa y sobre él actuasen todas las fuerzas presentes en el sistema. 2.1 Ejemplo Dos masas iguales o diferentes. m1 x cm m2 m1 x cm x m1 = m2 x m1 =/ m 2 m1 = m2 1 xcm = (x1 + x2 ) 2 m1 6= m2 xcm = m2 1 (x1 m1 + x2 m2 ) m1 + m2 4 Tema 4. Sistemas de partı́culas 2.2 Ejemplo Considérese la siguiente distribución de masas en un plano: m1 m2 m3 −→ −→ −→ = 1 kg = 2 kg = 3 kg ~r1 = (1, 1) (m) ~r2 = (−2, 1) (m) ~r3 = (3, −2) (m) y (m) m2 m1 x (m) c.m. m3 La posición del centro de masas viene dada por: ~rcm = xcm 3 1 X mi~ri M i=1 3 1 X 1 = mi xi = (1 − 4 + 9) = 1 m M i=1 6 ycm = 1 1 (1 + 2 − 6) = − m 6 2 1 =⇒ ~rcm = 1, − (m) 2 A menudo un sistema fı́sico real no está formado por partı́culas identificables individualmente, cuyas contribuciones puedan simplemente sumarse. Esto pasa con cualquier objeto macroscópico, formado por moléculas, pero que observado desde una distancia adecuada, puede considerarse como un continuo. Se define el vector de posición del centro de masas para un sistema continuo como: ~rcm 1 = M Z ~r dm, 5 Tema 4. Sistemas de partı́culas donde dm representa un elemento infinitesimal de masa localizado en la posición ~r. Un modo alternativo de expresar ~rcm es introduciendo la densidad1 : ρ(~r) = dm dV z dm r x y Esta es la definición general de densidad de masa. Es una función local, que, en general, depende del punto del cuerpo donde se calcule. Únicamente en sistemas uniformes u homogéneos, la densidad es independiente de la posición, ρ 6= ρ(~r) y entonces ρ = M/V , donde M y V son la masa y volumen total del sistema. La posición del centro de masas para un sistema heterogéneo será: ~rcm 1 = M Z ~rρ(~r) dV Y si es homogéneo: ~rcm ρ = M Z 1 ~r dV = V Z ~r dV 2.3 Ejemplo Determı́nese el centro de masas de una varilla homogénea de longitud `. 1 En sistemas bidimensionales es habitual definir la densidad superficial de masa como: σ = dm/dS, es decir, la masa por unidad de superficie y en sistemas unidimensionales se define la densidad lineal de masa como: λ = dm/d`. 6 Tema 4. Sistemas de partı́culas dm 0 x dx x l Sea λ la densidad lineal de masa de la varilla, que es constante por ser la varilla uniforme y dm un elemento diferencial de masa de longitud dx situado a una distancia x del origen. λ= m dm = ` dx −→ dm = λ dx ` Z Z 1 ` λ λ x2 λ `2 xcm = = , xλ dx = x dx = = m m m 2 0 m2 2 que es el resultado que cabrı́a de esperar por ser el sistema homogéneo. 2.2. Movimiento del centro de masas En general, describir el movimiento de un sistema formado por varias partı́culas es muy complicado, ya sea el movimiento de una molécula formada por varios átomos (sistema discreto) o de un objeto macroscópico extenso y continuo. Veremos cómo el estudio del movimiento del centro de masas del objeto facilita conocer el movimiento del sistema. Supongamos, por ejemplo, un sistema discreto: ~rcm n 1 X = mi~ri M i=1 −→ M~rcm = n X mi~ri , i=1 derivando respecto al tiempo: n d~rcm X d~ri = mi M dt dt i=1 −→ M~vcm = n X mi~vi , i=1 y derivando otra vez, n d~vcm X d~vi M = mi dt dt i=1 −→ M~acm = n X mi~ai . i=1 Según la segunda ley de Newton, mi~ai , representa la fuerza neta resultante sobre cada partı́cula, f~i . Esta fuerza siempre se puede descomponer en una suma de las fuerzas externas e internas al sistema: f~i = f~i,int + f~i,ext 7 Tema 4. Sistemas de partı́culas Las internas se deben a las partı́culas que forman el sistema entre sı́. Obedecen el principio de acción y reacción, por lo que al sumar sobre todas las partı́culas, la fuerza neta debida a interacciones internas se anula: M~acm = n X 0 n > X~ ~i,int f + fi,ext = F~ext . i=1 i=1 Es decir, que el centro de masas se mueve como si en él estuviese concentrada toda la masa del sistema y sobre él actuasen todas las fuerzas externas presentes. Esta ecuación de movimiento permite sólo describir la dinámica del centro de masas del sistema. Veremos más adelante cómo podemos estudiar el movimiento general de todo el sistema. Aunque hemos hecho la deducción sólo para sistemas discretos, en el caso de sistemas continuos el resultado que se obtiene es análogo. 3. Momento lineal 3.1. Definición Partı́cula única. Se define el momento lineal de una única partı́cula como la magnitud vectorial p~ = m~v . En el Sistema Internacional de unidades se mide en kg.m/s y sus dimensiones son [p] = M LT −1 . Esta magnitud también recibe el nombre de cantidad de movimiento. Veamos cómo se expresa la segunda ley de Newton en términos de p~ para un sistema formado únicamente por una partı́cula 2 : d~p d~v = m = m~a = f~. dt dt Es decir, que la fuerza neta que actúa sobre la partı́cula no es más que la variación respecto al tiempo de su momento lineal. Sistema de partı́culas. Para un sistema de partı́culas se define la cantidad de movimiento como: P~ = n X i=1 2 Considerando la masa constante. p~i = n X i=1 mi~vi = M~vcm . 8 Tema 4. Sistemas de partı́culas Veamos cómo se expresa la segunda ley de Newton en este caso: dP~ d~vcm =M = M~acm = F~ext . dt dt Es decir, que la variación del momento lineal total del sistema coincide con la fuerza externa que actúa sobre él. El cambio de la cantidad de movimiento de un sistema sólo está asociado a las fuerzas externas que actúan sobre él, porque según el principio de acción y reacción la suma de todas las fuerzas internas se cancela. 3.2. Conservación del momento lineal Hemos visto que tanto para una partı́cula individual como para un sistema de partı́culas, la cantidad de movimiento sólo se puede alterar si existe alguna fuerza externa neta no nula. Dicho de otro modo, F~ext = 0 −→ dP~ =0 dt =⇒ ~ P~ = cte. Si la suma de todas las fuerzas externas es nula, la cantidad de movimiento del sistema se conserva, es una constante del movimiento. Este principio de conservación es una de las leyes más importantes de la Mecánica. Es más amplia que la ley de conservación de la energı́a en el sentido de que la energı́a mecánica sólo se conserva si todas las interacciones son de carácter conservativo. En cambio, la conservación del momento lineal es independiente de la naturaleza de las fuerzas que actúan sobre el sistema. Siempre que la acción externa neta sobre él se anula, P~ permanece constante. Se dice entonces que el sistema está aislado. Conviene además destacar que P~ se conserva como una magnitud vectorial, es decir, en módulo, dirección y sentido, lo que a efectos prácticos permite plantear sistemas de varias ecuaciones. Ejemplo tı́pico de situaciones que se resuelven aplicando la conservación de la cantidad de movimiento son las colisiones, que estudiaremos a continuación. 4. Colisiones Denominaremos colisión a una interacción entre dos o más objetos que tiene lugar en un tiempo muy corto y en una región determinada del espacio. Esta interacción produce fuerzas entre los objetos que son mucho más importantes que el resto de las fuerzas que puedan existir. Esto conlleva que el momento lineal total se conserve, pues las fuerzas externas en la colisión se 9 Tema 4. Sistemas de partı́culas consideran despreciables frente a las existentes entre las partı́culas del sistema. En un choque dos objetos se acercan con velocidad constante, interaccionan y se separan con velocidad otra vez constante. No estaremos interesados en el proceso que tiene lugar en la propia colisión, sino en el antes y el después, es decir, cómo obtener el estado final de movimiento de las partı́culas a partir del inicial. En cualquier tipo de colisión, el momento lineal total del sistema permanece constante: P~ = n X ~ p~i = cte. i=1 Esto se debe simplemente a que consideramos despreciable cualquier acción externa sobre el sistema. Tipos de colisiones: ? Colisiones elásticas: son aquellas en que además de conservarse P~ , se conserva la energı́a cinética total del sistema. ? Colisiones inelásticas: son aquellas en que sólo se conserva el momento lineal total del sistema. Colisiones perfectamente inelásticas son aquellas colisiones inelásticas en que los objetos que interaccionan permanecen unidos después del choque. Sus velocidades finales son iguales entre sı́ e igual a la del centro de masas del sistema. Estamos considerando que justo antes y justo después de la colisión no hay fuerzas externas sobre las partı́culas que colisionan, es decir, no tienen energı́a potencial, sólo cinética. Decir que en una colisión elástica se conserva Ec es decir que durante la colisión se conserva la energı́a mecánica total del sistema, o sea, que la fuerza de interacción justo en la colisión es conservativa. Si no se conserva Ec es porque parte de ella se ha convertido en trabajo no conservativo. En general, las colisiones reales son inelásticas. La variación de energı́a cinética se debe a la existencia de fuerzas conservativas que, por ejemplo, varı́an la forma del objeto. De este modo una parte de la energı́a de la colisión se invierte en deformar el propio objeto y de ahı́ que la energı́a cinética quede alterada en el choque. 4.1. Colisiones elásticas en una dimensión Consideremos dos partı́culas que chocan según la siguiente notación en el sistema de referencia del laboratorio: 10 Tema 4. Sistemas de partı́culas colisión vi1 vi2 m1 vf 2 vf 1 x m1 m2 m2 Por el principio de conservación del momento lineal (al ser un sistema en una dimensión se expresa mediante una única ecuación): −→ Pi = Pf m1 vi1 + m2 vi2 = m1 vf 1 + m2 vf 2 . (1) Por ser el choque elástico, la energı́a cinética total del sistema también se conserva, 1 1 1 1 2 2 m1 vi1 + m2 vi2 = m1 vf21 + m2 vf22 . 2 2 2 2 −→ Eci = Ecf (2) Sacando factor común a las masas en las dos ecuaciones: m1 (vi1 − vf 1 ) = m2 (vi2 − vf 2 ) 1 1 2 2 m1 (vi1 − vf21 ) = m2 (vi2 − vf22 ), 2 2 y dividiendo ambas ecuaciones: vi1 + vf 1 = vi2 + vf 2 −→ vi1 − vi2 = −(vf 1 − vf 2 ) −→ vf 2 − vf 1 = −(vi2 − vi1 ) Es decir, que la velocidad relativa (en módulo) de las partı́culas se conserva en el choque. Esta es una caracterı́stica esencial de las colisiones elásticas en una dimensión. Si consideramos como datos de partida del problema las masas y las velocidades iniciales, las velocidades finales se pueden obtener considerando (1) y (2) como un sistema de dos ecuaciones con dos incógnitas. Se puede resolver para obtener: m1 − m2 2m2 vf 1 = vi1 + vi2 m1 + m2 m1 + m2 2m1 m2 − m1 vf 2 = vi1 + vi2 , m1 + m2 m1 + m2 Si consideramos como caso particular que la partı́cula 2 está en reposo (o fijamos sobre ella el sistema de referencia) se verifica que: vf 1 vf 2 m1 − m2 = vi1 m1 + m2 2m1 = vi1 , m1 + m2 11 Tema 4. Sistemas de partı́culas 4.1 Ejemplo m1 = m2 Si el objeto 2 está inicialmente en reposo: vf 1 = 0; vf 2 = vi1 . Es decir, que si dos masas iguales chocan, estando una inicialmente en reposo, después de la colisión se mueve ésta última con la velocidad de la incidente y ésta queda en reposo. Si el objeto 2 no está inicialmente en reposo: vf 1 = vi2 ; vf 2 = vi1 . Las masas intercambian sus velocidades en la colisión. 4.2 Ejemplo m1 >> m2 y el objeto 2 está inicialmente en reposo vf 1 ' vi1 ; vf 2 ' 2vi1 . La velocidad del objeto incidente no varı́a y la del menos másico se hace el doble que la de aquel. 4.3 Ejemplo m2 >> m1 y el objeto 2 está inicialmente en reposo vf 1 ' −vi1 ; vf 2 ' 0. El objeto pequeño rebota hacia atrás y el estado de movimiento del grande permanece inalterado. 4.2. Colisiones inelásticas en una dimensión En general, un choque inelástico es dı́ficil de estudiar porque, como la energı́a cinética no se conserva, sólo existe una ecuación (conservación escalar de P~ ) para obtener las dos velocidades finales. Por analogı́a con el caso elástico se introduce el denominado coeficiente de restitución, e, que es la medida de la elasticidad de una colisión. Se define de forma que: vf 2 − vf 1 = −e(vi2 − vi1 ) ( e =1 e =0 −→ −→ colisión elástica vf 2 = vf 1 −→ colisión perfectamente inelástica En una colisión perfectamente inelástica las dos masas permanecen unidas tras el choque. Es el caso, por ejemplo, de dos bolas de plastilina: 12 Tema 4. Sistemas de partı́culas v f 1 = vf 2 ≡ vf vi 2 vi 1 colisión m2 m1 m1 + m2 Como se conserva la cantidad de movimiento: m1 vi1 + m2 vi2 = (m1 + m2 )vf −→ vf = m1 vi1 + m2 vi2 . m1 + m2 Un ejemplo de choque inelástico es el denominado péndulo balı́stico, que es un dispositivo válido para medir la velocidad de un proyectil que se mueve a gran velocidad. 4.4 Ejemplo Supongamos un proyectil disparado con velocidad desconocida, vi1 sobre un bloque de madera que se puede elevar tal y como muestra la figura: m2 m1 colisión v i1 h v i2=0 Energı́a cinética inmediatamente después de la colisión: Ec = 12 (m1 + m2 )vf2 . Particularizando la ecuación para vf en el caso vi2 = 0: vf = m1 vi1 m1 + m2 −→ Ec = 1 m21 v2 . 2 m1 + m2 i1 Después del choque, la energı́a cinética se transformará en energı́a potencial que eleva el conjunto (no hay fuerzas no conservativas y la energı́a mecánica se conserva): 1 m21 2 vi1 = (m1 + m2 )gh 2 m1 + m2 −→ vi1 = m1 + m2 p 2gh. m1 Mediante esta ecuación podemos entonces determinar la velocidad del proyectil incidente sin más que medir la altura que se eleva el conjunto. Tema 4. Sistemas de partı́culas 5. 13 Problemas 1. Determina el centro de masas de un alambre semicircular uniforme en función de su radio. (Respuestas: xcm = 0 ; ycm = 2R/π) 2. Una esfera A se mueve con una velocidad viA , choca con otra esfera B, inicialmente en reposo y ésta, al salir despedida, choca a su vez con otra esfera, C, también en reposo antes. Calcula la velocidad con que sale despedida la bola C. Todos los choques se suponen frontales y elásticos y las relaciones entre las masas son MA : MB : MC = 3 : 6 : 2. (Respuestas: vf C = viA ) 3. Sobre un saco de arena de 4 kg de masa colgado de un hilo se dispara un fusil cuya bala tiene una masa de 40 g. La bala atraviesa el saco y recorre una distancia de 20 m antes de chocar contra el suelo, que se encuentra 1,5 m debajo del saco. Si por el impacto de la bala el saco asciende 30 cm, calcula la velocidad de la bala en el momento del impacto. (Respuestas: vi = 278,6 m/s) 4. Un individuo de 80 kg se encuentra en el extremo de una tabla de 20 kg de masa y 10 m de longitud que flota en reposo sobre la superficie de agua de un estanque. Si el hombre se desplaza al otro extremo, a) ¿qué distancia recorre la tabla? b) ¿Qué distancia recorrerı́a la tabla si el hombre se encontrara inicialmente en el centro de la misma? (Considera despreciable el rozamiento con el agua). (Respuestas: a) x = 8 m; b) x = 4 m) 5. Una bala de masa m se introduce en un bloque de madera de masa M que está unido a un resorte espiral de constante de recuperación k. Por el impacto el resorte se comprime una longitud x. Sabiendo que el coeficiente de rozamiento entre el bloque y el suelo es µ, calcula la velocidad de la bala antes del choque. 2(m + M )x kx 2 (Respuestas: vi = + µ(m + M )g ) m2 2 6. Estima la fuerza media ejercida por el cinturón de seguridad de un automóvil sobre un conductor de 80 kg cuando choca contra un obstáculo fijo a una velocidad de 90 km/h. (Respuestas: f¯ = 25 kN) 14 Tema 4. Sistemas de partı́culas 7. Siguiendo el esquema de la figura, se suelta un péndulo de longitud l = 120 cm y de masa m = 100 g desde una posición inicial que forma un ángulo θi = 37o con la vertical. Después de la colisión con la masa M = 300 g, el péndulo rebota hasta una posición θf = 20o y la masa M se desliza por la superficie hasta detenerse. Si el coeficiente de fricción de la superficie con la masa M vale µc = 0,2, calcula la distancia que recorre M hasta detenerse. (Respuestas: d = 0,32 m) l m M 8. Un montacargas está subiendo con una velocidad constante de 1, 5 m/s y un observador en reposo deja caer una pelota desde un punto que se encuentra a una altura de 6, 3 m por encima de la plataforma en el momento en que la pelota ha sido abandonada. El coeficiente de restitución entre la pelota y la plataforma es 0, 5. ¿A qué distancia (por encima o debajo) se encontrará la pelota del punto de partida después del primer bote? (Respuestas: x1 − h = 2,23 m por debajo de A.) Tema 4. Sistemas de partı́culas 15 9. Se deja en libertad la bola A (150 g) de la figura, cuando el ángulo φ = 90o para chocar con la bola B (240 g). Sabiendo que el coeficiente de restitución es 0, 9. Calcúlense: a) La velocidad de B inmediatamente después del choque. b) La tensión máxima que soporta el hilo del que pende B. c) La altura máxima a la que se elevará B. d) ¿Qué valor debe tener φ para que el ángulo máximo entre el hilo de suspensión de B y la vertical sea 45o . (Respuestas: a) vB0 = 2,51 m/s; b) Tmax = 4,03 N; c) h0 = 0,32 m; d) φ = 78,02o ) 10. Dado el sistema de la figura, donde la masa m1 = 3 kg parte del reposo. Calcula la constante de recuperación del resorte, si este se comprime 20 cm, después del choque elástico, producido entre m2 = 10 kg y m3 = 5 kg. La fuerza de rozamiento en la superficie del cuadrante es 10 N. El coeficiente de restitución para el choque entre m1 y m2 es 0, 3. El coeficiente de rozamiento entre la superficie BD y los cuerpos es 0, 05. (Respuestas: k = 13,31 N/m) Tema 4. Sistemas de partı́culas 16 11. Inicialmente, la masa m = 1 kg y la masa M están ambas en reposo sobre un plano inclinado si rozamiento según la figura. La masa M se apoya en un muelle de constante 11000 N/m . La masa m se deja libre, choca elásticamente con la masa M y rebota a una distancia de 2, 56 m sobre el plano inclinado. La masa M se detiene momentáneamente a 4 cm de su posición inicial. Determina la masa M. (Respuestas: M = 9,0 kg) 12. Una niña de m1 = 20 kg se desliza por una pendiente, partiendo del reposo a una altura de 5 m, hacia la superficie de un carro de m2 = 10 kg. La superficie horizontal del suelo presenta un rozamiento de coeficiente µ = 0, 1 y la constante de recuperación del muelle es k = 400 N/m. El carro y la niña se deslizan hasta comprimir el muelle al máximo y después son lanzados por éste en sentido contrario hasta una distancia d = 5 m. Calcúlense: a) La velocidad que adquiere el carro cuando la niña cae sobre él. b) La distancia D que separa al carro del extremo izquierdo del muelle en sus posiciones iniciales. (Respuestas: a) v = 6,6 m/s; b) D = 16,37 m) Índice alfabético Cantidad de movimiento, 7 Sistema discreto de partı́culas, 3 Centro de masas sistema continuo, 4 continuo de partı́culas, 4 sistema discreto, 3 heterogéneo, 5 homogéneo, 5 Coeficiente de restitución, 11 Sistema aislado, 8 Colisión, 8 elástica, 9 inelástica, 9 perfectamente inelástica, 9 Conservación del momento lineal, 8 Constante del movimiento, 8 Densidad, 5 lineal, 5 superficial, 5 Fuerza externa, 6 interna, 6 Fuerzas internas, 7 Momento lineal, 7 Movimiento constante del, 8 Péndulo balı́stico, 12 17