CONTROL BÁSICO Sistemas de Control Realimentados
Anuncio

Facultad de Ingeniería - UNER
CONTROL BÁSICO
TEMAS:
- Tipos de Reguladores
Facultad de Ingeniería – UNER
Carrera: Bioingeniería
Plan de estudios: 2008
Sistemas de Control
Realimentados
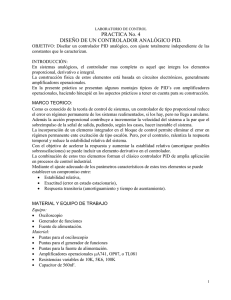
Consideramos el lazo básico de control SISO
Órgano de
Acción Final X
+
e
y
REGULADOR
-
PLANTA o PROCESO
C
M
SENSOR
Ley de Control de la realimentación negativa:
«Incrementar la variable manipulada (y) cuando la
variable del proceso (M) sea más pequeña que la
referencia (X) y disminuirla cuando ésta sea más
grande».
Reguladores o Controladores
Los Controladores/Reguladores más utilizados pueden ser:
{
Todo o nada (o por sus nombre en inglés On/Off)
{
Proporcional (P)
{
Proporcional e Integral (PI)
{
Proporcional y Derivativo (PD)
{
Proporcional, Integral y Derivativo (PID)
Hoy en día, a pesar de la abundancia de sofisticadas
herramientas y métodos avanzados de control, los controladores
PID y PI son los más utilizado en la industria moderna y equipos
biomédicos, controlando más del 95% de los procesos
industriales en lazo cerrado.
Asignaturas: Control Básico
1
Facultad de Ingeniería - UNER
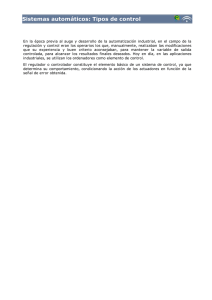
Regulador Todo o Nada
Son implementados mediantes Triacs, optotriacs, relés,
termostatos, presostastos, etc y su forma de funcionamiento es
la siguiente:
M
B
PC1
y (t ) =
ymax si e > 0
ymin si e < 0
A
t
y
t
El control on-off muchas veces es apropiado para mantener la
variable controlada del proceso cerca del valor de la referencia
que fue especificada, pero típicamente resulta en un sistema
donde las variables oscilan.
Regulador Todo o Nada
Este tipo de controlador es aplicable en procesos con un gran
efecto acumulativo, como son los de temperatura, presión de
un tanque y nivel de un depósito.
Una variante del anterior es el controlador todo/nada con zona
muerta. De esta forma evitamos una frecuencia elevada de
apertura y cierre de la válvula o puesta en marcha de motores
en el caso de electrobombas, compresores, etc., que podrían
dañarse.
M
A
PC1
PC2
y (t ) =
ymax si M < Pc2
ymin si M > Pc1
Zona Muerta
B
t
y
t
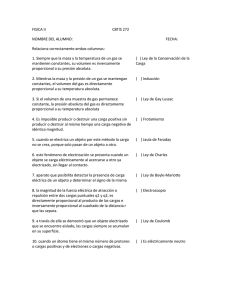
Regulador Proporcional
En un controlador proporcional la salida que va a la válvula es
proporcional a la señal de error. Es decir, responde a la ecuación :
y = K p (X − M ) = K ⋅ e
y(%)
100
donde Kp es la ganancia del
controlador dado por:
50
100
Kp =
BP
0
0
BP
50
M(%)
Banda proporcional
Asignaturas: Control Básico
2
Facultad de Ingeniería - UNER
Regulador Proporcional
Expresando X, M e y en tanto por ciento, la ecuación anterior se
puede convertir en:
y (% ) =
100
(X − M )
BP
A BP se le llama banda proporcional y expresa en qué
porcentaje tiene que cambiar la medida M, alrededor del punto de
consigna X, para que la salida del controlador abarque toda su
gama de variación posible. Así, por ejemplo, un controlador con
BP = 10% indica que cuando la medida (M) cambie un 10%
alrededor de la consigna establecida, la válvula pasará de
totalmente abierta a totalmente cerrada.
Regulador Proporcional
Si el controlador es de acción inversa, la ganancia es
negativa y la recta que expresa la variación de y respecto a
M tiene pendiente negativa. Si utilizamos el mismo
ejemplo:
y(%)
100
100
(X − M )
BP
y = −2,5( X − M )
y=
50
0
0
PC
50
BP
M(%)
Regulador Proporcional
El Regulador/controlador proporcional siempre deja un error
de posición en estado Estacionario (offset).
Para conseguir que el error sea muy pequeño deberíamos
ajustar la ganancia del controlador a un valor muy elevado (o
la banda proporcional a un porcentaje muy pequeño). El
inconveniente de tomar esta medida es que el sistema
controlado se puede hacer inestable y entrar en oscilación.
El controlador proporcional se podrá aplicar en procesos en
los que una variación porcentual de la apertura de la válvula
(Δy) produzca una variación porcentual de la salida del
sistema (ΔM) menor, y además que el tiempo muerto sea
pequeño y la constante de tiempo sea elevada.
Asignaturas: Control Básico
3
Facultad de Ingeniería - UNER
Regulador Proporcional – Integral (PI)
La ley de control de un regulador PI responde a la siguiente
ecuación:
t
Kp ⎞
⎛
⎛T .s +1⎞
1
⎟⎟
GPI(s) =⎜⎜Kp + ⎟⎟ = Kp.⎜⎜ I
y = K p (e + ∫ e.dt )
TI .s ⎠
TI 0
⎝ TI .s ⎠
⎝
K p .e
TI
e
Si e=cte.
y
Kp e
t
t
La función principal de la acción integral es asegurar que la
salida del proceso concuerde con la referencia en estado
estacionario (error nulo).
Regulador Proporcional – Derivativo (PD)
La ley de control de un regulador PD responde a la siguiente
ecuación:
⎛
TD .s ⎞⎟
GPD (s ) = K p (1 + TD .s ) o K p ⎜1 +
⎜ (τ f s + 1) ⎟
⎝
⎠
de ⎞
⎛
y = K p ⎜ e + TD ⋅ ⎟
dt ⎠
⎝
e
1
2
3
6
4
7
5
8
t
y
t
La acción derivativa tiene efecto «anticipativo», es decir
tiende a corregir el error en el momento en que se detecta que
éste tiende a cambiar.
Regulador Proporcional – Derivativo (PD)
El propósito de la acción derivativa es mejorar la estabilidad
de lazo cerrado.
Si se prevé que la señal proveniente del regulador va tener
ruido no es aconsejable usar la acción derivativa.
En ciertos casos nos interesa que la acción derivativa no
tenga efecto si se produce un cambio en el punto de
consigna. Para ello, dicha acción deberá tener en cuenta
solamente los cambios de la señal de realimentación. Un
regulador que actúe de esta manera tendrá una salida de la
forma:
y = TD ⋅
Asignaturas: Control Básico
dM
dt
4
Facultad de Ingeniería - UNER
Regulador Proporcional Integral y
Derivativo (PID)
Son reguladores que tienen las tres acciones. Una posible
representación de la ley de control es:
t
⎛
de ⎞
1
y (t ) = K p .⎜⎜ e + ∫ e ⋅ dt + TD ⋅ ⎟⎟
T
dt ⎠
I 0
⎝
⎞
⎛
1
GPID (s ) = K p .⎜⎜1 +
+ TD s ⎟⎟
⎠
⎝ TI .s
Existe una familia de controladores PID que han mostrado ser
robustos y extremadamente beneficiosos en el control de muchas
aplicaciones de importancia en la industria y equipos biomédicos.
El control PID es suficiente para procesos donde la dinámica
dominante es de segundo orden. La acción derivativa del PID
puede dar buenos resultados para aumentar la velocidad de
respuesta. El control de temperatura es un caso típico. La acción
derivativa es también beneficiosa cuando se requiere un control más
fino para un sistema de alto orden.
Regulador Proporcional Integral y
Derivativo (PID)
Existen diferentes formas de representación de los
Reguladores PID:
⎛
La forma estándar o no interactiva: GPID (s ) = K p .⎜⎜1 +
⎝
⎞
1
+ TD s ⎟⎟
TI .s
⎠
La forma serie o interactiva:
⎛
1 ⎞⎟
GPID _ 1 (s ) = K *.⎜1 +
.(1 + s.TD* )
⎜ T *.s ⎟
I ⎠
⎝
La forma paralela:
K
⎛
⎞
GPID _ 2 (s ) = ⎜ K + I + K D s ⎟
s
⎝
⎠
Regulador Proporcional Integral y
Derivativo (PID)
La forma estándar algunas veces es llamada ”algoritmo ideal”. Las
acciones proporcional, integral y derivativa no son interactivas en el
dominio del tiempo. Este algoritmo admite ceros complejos, lo que
es útil cuando se controla sistemas con polos oscilatorios.
La forma serie es también llamada forma clásica. Esta forma tiene
una buena interpretación en el dominio de la frecuencia, ya que los
ceros corresponden a los valores inversos de los tiempos derivativo
e integral. Todos los ceros del controlador son reales. La mayoría de
los controladores usan esta forma.
La forma paralela es la más general. El controlador puede tener
ceros complejos. En esta forma los parámetros tienen poca
interpretación física.
Asignaturas: Control Básico
5
Facultad de Ingeniería - UNER
Algunos Circuitos electrónicos
para Diseñar un Controlador…
Asignaturas: Control Básico
6