restart:with(plots): Series de Taylor. En esta parte se va a aproximar
Anuncio
: Series de Taylor. En esta parte se va a aproximar")
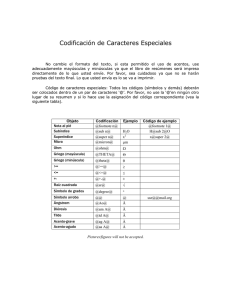
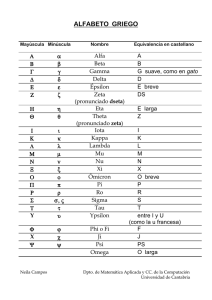
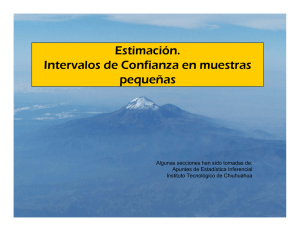
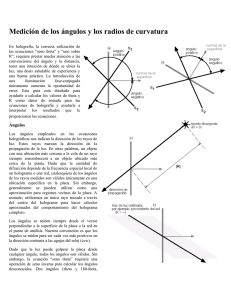
> restart:with(plots): Series de Taylor. En esta parte se va a aproximar la función seno con series de Taylor truncadas Se definen tres series de Taylor truncadas > seno1:=x->x; > seno5:=x->x-x^3/3!+x^5/5!-x^7/7!+x^9/9!; > seno10:=x->(sum((-1)^(k)*x^(2*k+1)/(2*k+1)!,k=0..9)); Se crean gráficas como objetos, para después desplegarlas con la función display de Maple > grafica1:=plot(seno1(x),x=-4..4,color=BLUE): > grafica5:=plot(seno5(x),x=-5.5..5.5,color=RED): > grafica10:=plot(seno10(x),x=-3*Pi..3*Pi,color=YELLOW): > graficaSeno:=plot(sin(x),x=-4*Pi..4*Pi,color=GREEN): > display(grafica1,grafica5,grafica10,graficaSeno); En el tiro parabólico el alcance de ángulos complementarios es el mismo. Establecemos una velocidad inicial v 0 y el tiempo del movimiento como función de theta > v0:=30; g:=9.81; tfinal:=theta->2*v0*sin(theta)/g; Establecemos tanto x como y como funciones del tiempo > x:=t->v0*cos(theta)*t; y:=t->v0*sin(theta)*t-g*t^2/2; Se define un ángulo y se crean gráficas para desplegarse después > theta:=Pi/8;grafPiPart8:=plot([x(t),y(t),t=0..tfinal(theta)],color=blue,scaling=CONSTRAINED): > theta:=3*Pi/8:graf3PiPart8:=plot([x(t),y(t),t=0..tfinal(theta)],color=red,scaling=CONSTRAINED): > display(grafPiPart8,graf3PiPart8,scaling=CONSTRAINED); Se hace lo mismo con otro par de ángulos complementarios y con Pi/4 radianes > theta:=Pi/3;grafPiPart3:=plot([x(t),y(t),t=0..tfinal(theta)],color=magenta,scaling=CONSTRAINED): > theta:=Pi/6;grafPiPart6:=plot([x(t),y(t),t=0..tfinal(theta)],color=green,scaling=CONSTRAINED): > theta:=Pi/4;grafPiPart4:=plot([x(t),y(t),t=0..tfinal(theta)],color=brown,scaling=CONSTRAINED): Se muestran las gráficas > display(grafPiPart8,grafPiPart6,grafPiPart4,grafPiPart3,graf3PiPart8,scaling=CONSTRAINED); Ejemplo del mono y el cazador. Se establece la altura inicial del mono y la distancia horizontal que separa al mono de la escopeta > h:=5; L:=8; El problema establece que ángulo de disparo est dado por > theta:=arctan(h/L); Se define una velocidad de disparo > v0:=15; El vector posición del dardo es > xDardo:=t->v0*cos(theta)*t;yDardo:=t->v0*sin(theta)*t-g*t**2/2; Mientras que el vector posición del mono es > xMono:=t->L;yMono:=t->h-g*t**2/2; El tiempo en el que el mono y el dardo hacen contacto es > tau:=v0->L/(v0*cos(theta)); > grafDardoV015:=plot([xDardo(t),yDardo(t),t=0..tau(v0)],color=red,scaling=CONSTRAINED): > grafMonoV015:=plot([xMono(t),yMono(t),t=0..tau(v0)],color=red,scaling=CONSTRAINED): > display(grafMonoV015,grafDardoV015); Disminuyendo la velocidad se tiene que > v0:=10; > grafDardoV010:=plot([xDardo(t),yDardo(t),t=0..tau(v0)],color=red,scaling=CONSTRAINED): > grafMonoV010:=plot([xMono(t),yMono(t),t=0..tau(v0)],color=red,scaling=CONSTRAINED): > display(grafDardoV010,grafMonoV010); Con una velocidad más pequeña el dardo le pega al mono después de que el mono haya superado la altura inicial del dardo > v0:=8; > grafDardoV08:=plot([xDardo(t),yDardo(t),t=0..tau(v0)],color=red,scaling=CONSTRAINED): > grafMonoV08:=plot([xMono(t),yMono(t),t=0..tau(v0)],color=red,scaling=CONSTRAINED): > display(grafMonoV08,grafDardoV08); Comparación entre del tiro parabólico con fricción y sin fricción El valor de x como función del tiempo es: x (t) = x 0 + mv 0 cos(theta)/b + (mv 0 cos (theta)/b) exp(-bt/m) Mientras que el valor de y como función del tiempo es: y(t) = y 0 + mv 0 sen(theta)/b +m 2g/b 2 + (mv 0 sen(theta)/b + m 2g/b 2) exp(-bt/m) - mgt/b Se define el ángulo de disparo > theta:=Pi/4; Se define la razón de la constante b partido M y la velocidad inicial > bPartM:=0.5; v0:=15; > yFriccion:=t->(v0*sin(theta)/bPartM+ g/(bPartM^2))*(1-exp(-bPartM*t))-g*t/bPartM; > xFriccion:=t->(v0*cos(theta)/bPartM)*(1-exp(-bPartM*t)); Se crea la gráfica para la trayectoria con fricción: nota que el tiempo de recorrido es menor que para aquella sin fricción > grafFriccion:=plot([xFriccion(t),yFriccion(t),t=0..0.87*tfinal(theta)],color=red): > grafPiPart4:=plot([x(t),y(t),t=0..tfinal(theta)],color=brown): > display(grafFriccion,grafPiPart4,scaling=CONSTRAINED); Después de que alcanza su punto máximo la trayectoria se hace “más vertical” esto se debe a que la velocidad en x decrece conforme avanza el tiempo y la velocidad en y tiende a una velocidad terminal constante distinta de 0 > diff(xFriccion(t),t); Aqu copia y pega el resultado anterior para definir la siguiente función > vXFriccion:=t->7.500000000*2^(1/2)*exp(-0.5*t); > plot(vXFriccion(t),t=0..10); > diff(yFriccion(t),t); Aqu tambin copia y pega el resultado anterior para definir la siguiente función > vYFriccion:=t->.5*(15.00000000*2^(1/2)+39.24000000)*exp(-.5*t)-19.62000000; > plot(vYFriccion(t),t=0..10); Cuando b tiende a 0 el movimiento con fricción tiende al movimiento sin fricción > bPartM:=0.01; > grafFriccion:=plot([xFriccion(t),yFriccion(t),t=0..tfinal(theta)]): > display(grafFriccion,grafPiPart4,scaling=CONSTRAINED);