Movimiento Relativo (2013)
Anuncio
")
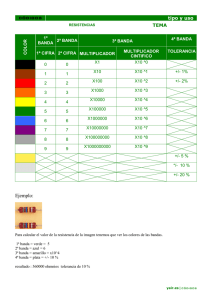
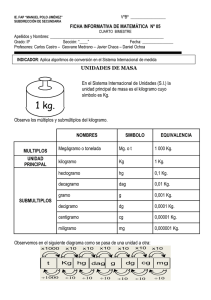
Movimiento Relativo (2013) Héctor O. Di Rocco IFAS, Fac. de Cs. Exactas, UNCPBA May 9, 2013 Abstract Estudiaremos en esta clase cómo correlacionar las medidas de r, v y a realizadas por observadores en movimiento relativo entre sí, prestando especial atención al caso cuando uno de los observadores pertenece a un sistema de referencia que rota respecto de otro que consideramos …jo y, en principio, inercial. Un concepto importante a no perder de vista es que el SR respecto del cual estudiamos un proceso físico lo elegimos nosotros, a nuestra mejor conveniencia. Y a veces conviene (o resulta) que el sistema más cómodo es no inercial, como por ejemplo, el movimiento de los cuerpos respecto de la Tierra, a sabiendas de que ésta no es inercial. Esta unidad muestra, además, la importancia de considerar la operación entre vectores que hemos introducido hace poco: el producto vectorial; éste quedará de mani…esto en las deducciones y en los ejemplos a mostrar donde entren en juego las rotaciones. 1 Velocidad de dos móviles respecto de un Sistema de Referencia; velocidad relativa Vamos a considerar un SR denominado S y dos móviles A y B. Un ejemplo concreto podría ser que el origen de S sea el centro de masas del Sistema Solar (que está en realidad, dentro mismo del Sol y prácticamente en su centro)1 , mientras que A y B son dos planetas cualesquiera. La cuestión principal es averiguar cuánto valen las diversas magnitudes cinemáticas respecto de S así como las de uno de ellos respecto del otro. Sean los vectores posición de ambos móviles rA y rB ; además, designamos con rBA la posición de B respecto de A, tal que rB = rA + rBA (o sea, rBA = rB rA ). UNA CUESTIÓN O DOS ACERCA DE LAS NOTACIONES. La presente notación rBA debe leerse como la posición de B respecto de la de A; algunos autores escriben, de forma totalmente legítima rAB ; signi…cando el vector que va desde A hasta B. ¡Es solamente cuestión de notación: hay que elegir alguna...! 1 Debido a que el Sol contiene más del 99% de la masa de todo el sistema solar. 1 rBA rA rB De…nición de los vectores. OJO CON ESTE DIBUJO Si drB drA ; vB = ; dt dt la velocidad relativa de B respecto de A será vA = vBA = vBA = drBA d = (rB dt dt vAB : rA ) = vB vA : O sea, si bien, en principio, estamos hablando del movimiento de dos masas respecto de S, el sencillo resultado anterior nos dice que podemos tomar uno de los cuerpos, por ejemplo A; como origen de otro sistema S 0 y referir el movimiento de B respecto de A (y viceversa)2 . Análogamente, derivando las expresiones para las velocidades, encontramos aBA = aB 1.1 aA = aAB : Ejemplo (tomado del libro de Alonso-Finn) Supongamos un aeroplano A que se mueve en la dirección N a una velocidad de 300 km/h respecto de la Tierra. Otro avión B se mueve en la dirección N 60o O con velocidad de 200 km/h respecto de T. Encontrar la velocidad de B respecto de A. Elegimos la dirección N sobre el eje y. Entonces 2 Un claro ejemplo de todo esto es el siguiente: si bien el movimiento de los planetas se describe de manera muy sencilla con respecto al Sol (son muy aproximadamente elipses), nosotros podemos describirlo desde la Tierra. 2 vA = 300j; vB vA vBA tan 2 vB = 200 cos (30o ) i+200 sin (30o ) j; = vB + ( vA ) = 200 cos (30o ) i+ (200 sin (30o ) 300) j = (173:2i+200j) ; por lo tanto jvBA j = 264:6 km=h; 200 = ) = 49:1o respecto del eje horizontal. 173:2 Movimiento relativo de traslación uniforme: movimiento de un cuerpo respecto de dos sistemas de referencia (dos observadores) El primer punto a tener en cuenta es que los relojes de ambos observadores deben estar sincronizados. Un sistema de referencia SR es un sistema rígido. Se demuestra en Dinámica Analítica que el movimiento más general de un sistema rígido es roto-traslatorio: se puede descomponer en la traslación del centro de masas, C, y una rotación respecto de éste. Tratemos primero el caso en que uno de los SR, S’(x’,y’,z’), se mueve sobre el eje x respecto de S (x,y,z) con MRU: v=cte. Evidentemente, podría moverse (por ejemplo) sobre una recta ubicada en el plano xy, pero no hay que olvidar que la elección del SR la hacemos nosotros y, por lo tanto, tenemos la libertad de elegir la forma más simple de describirlo. De cualquier manera, en el Ejemplo 1 veremos tal situación. z’ z V r A r’ O’ O y y’ 3 x= x’ Si para t = 0 ambos orígenes coinciden (si no, la generalización es inmediata) ! OO0 = vO0 t = vO0 ti: Si el cuerpo A se mueve sobre una trayectoria arbitraria, su posición respecto de los sistemas S y S’viene dada por ! ! ! OA = OO0 + O0 A o, lo que es lo mismo r = vO0 t + r0 ; (1) que podemos generalizar, si para t = 0 los orígenes no coinciden, a r = r0 + vO0 t + r0 : (2) Esta relación vectorial, en término de sus componentes nos da las transformaciones de Galileo (TG): x0 y0 z0 t0 = x vO0 t = y = z = t x y z t = x0 + vO0 t = y0 = z0 = t0 : La mecánica clásica presupone que el intervalo de tiempo entre dos sucesos medidos desde S es igual al medido desde S’. Como corolario de las ecuaciones de Maxwell, resulta que las ecuaciones del electromagnetismo no satisfacen las TG, sino las transformaciones de Lorentz (TL), que veremos en las últimas clases del curso. Fue idea de Poincaré y de Einstein postular que todas las ecuaciones de la Física deben satisfacer las TL, resultando así que las TG son válidas solamente para v << c: Derivando la ec. 1, tendremos v = vO 0 + v0 ; que debe leerse como: la velocidad "absoluta" (v) es la suma de la velocidad del origen del sistema móvil respecto del …jo (vO0 ) más la velocidad relativa (v0 )". Derivando nuevamente a = a0 ; en este caso, la aceleración es un invariante para este tipo de movimiento relativo entre ambos SR. Debe quedar claro que el movimiento de A es arbitrario; son los sistemas de referencia los que deben moverse relativamente entre sí con MRU, con los relojes debidamente sincronizados. 4 2.1 Ejemplos 1. Un punto P describe en el plano (x; y) un MRU con velocidad v, de componentes (vx ; vy ) ; partiendo en t = 0 del punto (x0 ; y0 ) : Determinar el movimiento desde S’, que se mueve sobre el eje x con velocidad vO0 : Proyectando sobre los ejes, tenemos las ecuaciones paramétrica 8 < x = x0 + vx t y = y0 + vy t ; Para S : (3) : z = 0 con v= y Para S 0 : 8 0 < x y0 : 0 z = x = = q vx2 + vy2 vO0 t = x0 + vx t vO0 t = x0 + (vx y0 + vy t 0 vO0 ) t : (4) Derivando adecuadamente tendremos vx0 = (vx y, por lo tanto v0 = vy0 = vy vO0 ) ; q (vx 2 vO0 ) + vy2 : Para tener la ecuación de la trayectoria en el sistema S, despejamos t = x0 ) =vx y entonces (x y = y0 + vy (x x0 ) = y0 vx vy x0 vy + x; vx vx lo que nos dice que en el sistema S la inclinación de la trayectoria está dada por tan = vy vx También en el plano (x0; y0) el movimiento es MRU; lo que cambia es la inclinación de la trayectoria, como veremos a continuación. En S’’t = (x0 x0 ) = (vx vO0 ) ; por lo cual, de la ec. (4) y 0 = y0 + vy (x0 (vx vy x0 vy x0 + (vx vO0 ) (vx vO0 ) x0 ) = y0 vO0 ) y tan 0 = vy0 vy = : 0 vx vx vO0 PREGUNTA: ¿Qué pasa si vx = vO0 ? 5 y0 + vy x0 (vx vO0 ) 2. Una masa puntual P realiza en el plano (x; y) un MRUA con aceleración a, de componentes ax ; ay ; partiendo del origen con velocidad inicial nula desde el origen. Describir el movimiento desde S’. En este caso aplicaremos las relaciones generales x0 y0 = x = 0 vO0 t vx0 vy0 = vx = vy vO0 ya vistas anteriormente. Las ecuaciones paramétricas son ax t2 ; 2 ay t2 = y0 = 2 x0 = x = y ax t2 2 vO0 t con lo cual vx vy dx = ax t; dt = vy0 = ay t: vx0 = = dx0 = ax t dt vO0 Desde el sistema S, O ve una recta de pendiente vy =vx = ay =ax : Desde S’, O’ve una recta de pendiente v0y ay t = ; vx0 ax t vO0 es decir, depende del tiempo. PREGUNTA: ¿Qué pasa para t = vO0 =ax ? 3. En el sistema S (por ejemplo el suelo) se deja caer una masa puntual según el eje z desde una altura h, ¿qué se ve desde S’(por ejemplo un vagón), que se mueve hacia adelante con velocidad vO0 ? En S tenemos x = 0; y = 0; z = h gt2 =2 vx = 0; vy = 0; vz = y 0 = 0; z0 = h gt mientras que en S’ x0 = vO0 t; 6 gt2 =2 vx0 = Despejando t = vO0 ; vy0 = 0; vz0 = gt: x0 =vO0 y reemplazando z0 = h g 2 x0 vO0 2 ; o sea que, mientras desde S se observa que la masa cae verticalmente, desde S’se observa la composición de movimientos y se ve una parábola hacia atrás del origen O’. Recíprocamente, si se deja caer una piedra desde un vagón (S’), se observa en S una parábola "hacia adelante" de O. ¡Hacerlo! 3 Movimiento relativo rotacional uniforme (! ! cte) Este caso, nos permite estudiar, como caso particular, la rotación alrededor de un eje (rueda, tocadiscos, etc.). Aquí conviene pensar que el sistema S, …jo, es inercial (no tiene por qué serlo, pero tomemos este caso). Vamos a recordar, porque será útil en lo sucesivo, el teorema de Poisson: sea un vector arbitrario A, de módulo constante, que realiza un movimiento de precesión con velocidad angular ! ! (¡no necesariamente constante!); entonces A Movimiento de precesión de A dA ! = ! A; (5) dt en particular, cuando A = r; tenemos el resultado ya visto en la Cinemática del movimiento circular: dr ! = ! r dt 7 que nos la relación entre la velocidad lineal (medida en ms 1 ) y la velocidad angular. El resultado (5) puede aplicarse a cualquier vector; en particular al versor u de una "terna …ja" o u0 de una "terna móvil". 3.1 Teorema de las velocidades relativas Si los orígenes coinciden, entonces r = r0; z z’ r= r’ y’ y x x’ el vector posición es el mismo, lo que cambian son las compontentes. En función de éstas, respecto del sistema S r = xi+yj+zk y con respecto del sistema S’ r = x0 i0 +y 0 j0 +z 0 k0 ; IMPORTANTE: Tengamos en cuenta que, debido a que los orígenes coinciden, no escribimos en el segundo caso r0 ; sino r: La velocidad absoluta se obtiene como v= dr dt = f dx dy dz i+ j + k: dt dt dt (6a) Análogamente, la velocidad relativa será, en su propio sistema primado, v0 = dr dt = r dx0 0 dy 0 0 dz 0 0 i + j + k: dt dt dt (7) Dado que también es r = x0 i0 +y 0 j0 +z 0 k0 ; y efectuando las derivadas de los productos 8 dr d (x0 i0 ) = + ::: + ::: = dt dt dx0 0 dy 0 0 dz 0 0 i + j + k dt dt dt + x0 di0 dj0 dk0 + y0 + z0 dt dt dt ; (8) observamos que el primer (:::) es lo que hemos llamado v0 : El segundo (:::) será evaluado teniendo en cuenta el teorema de Poisson: di0 =dt = ! ! i0 ; etc., con lo cual x0 dj0 dk0 di0 + y0 + z0 dt dt dt =! ! (x0 i0 +y 0 j0 +z 0 k0 ) = ! ! r y entonces v = v0 + ! ! r dr dt o, lo que es lo mismo = f dr dt r +! ! r; (9) que puede expresarse claramente de esta manera: la velocidad absoluta de A (o sea la medida respecto de S) es la suma de la velocidad relativa (la medida respecto de S’) más la velocidad de rotación de S’ respecto de S. Generalizando, si los orígenes no coinciden en t = 0, entonces ! r =OO0 + r0 ! donde, en particular, OO0 podría ser constante, y v = vO 0 + v0 + ! ! r: ES IMPORTANTE RESALTAR LA VALIDEZ DEL SIGUIENTE RESULTADO GENERAL: para cualquier vector Q vale dQ dt = f ijo dQ dt rot +! ! Q: La demostración es fácil; basta escribir Q =Qx i+Qy j + Qz k =Q0x i0 +Q0y j0 + Q0z k0 y proceder como antes. 3.2 Teorema de las aceleraciones relativas (teorema de Coriolis) Este es un tema de relativa complejidad, tanto conceptual como algebraica por lo cual, para los propósitos de esta clase, podremos aceptar los resultados finales, dados por las ecs. 16 y 17. De todas maneras, vamos a dar la deducción, tratando de simplificarla. 9 Vamos a valernos de la ecuación anterior, que escribimos más sencillamente como dQ dt dQ dt = f r +! ! Q: (10) r; (11) Si la aplicamos a r, es decir cuando Q = r dr dt dr dt = f +! ! r dos notaciones equivalentes para este resultado son v = v0 + ! ! o, sino como antes r vf = vr + ! ! (12) r: Si ahora Q = vf ; tendremos los dos siguientes resultados, equivalentes: por la ec. 10 dvf dvf = +! ! vf ; dt f dt r mientras que por la ec. 12, derivando respecto del sistema …jo dvf dt dvr dt = f dvr dt = d ! (! dt d! ! + f + r)f r dt f f ! + ! dr dt ; f teniendo en cuenta que estamos tratando con el caso ! ! = cte; el segundo término del segundo miembro es nulo, por lo tanto dvf dt = f dvr dt f ! + ! dr dt : (13) f Calculemos el primer término del segundo miembro, usando nuevamente la ec. 10: dvr dvr = +! ! vr = ar + ! ! vr ; (14) dt f dt r el 2o término es, usando la ec. 11, cuando Q = r ! ! dr dt f dr dt = ! ! r = ! ! dr dt = ! ! vr + ! ! 10 r +! ! +! ! (! ! r (! ! r) : r) (15) Entonces, la ec. 13, sumando las ecs. 14 y 15 nos da af = ar + 2! ! vr + ! ! (! ! r) (16) que suele escribirse en la forma totalmente equivalente a = a0 + 2! ! v0+! ! (! ! r): (17) El término ! ! (! ! r) es la aceleración centrípeta mientras que 2! ! v0 es la aceleración complementaria o de Coriolis. Un observador en el sistema inercial S mide a y puede aplicar sin más la 2a Ley de Newton F =ma siendo F las fuerzas debidas a los procesos de interacción (las "fuerzas verdaderas"). Un observador en un S’no inercial mide a’, y por lo tanto llamando F =ma ma0 = F 2m! ! v0 m! ! (! ! r) ; visto desde el sistema en rotación, el término m! ! (! ! r) se denomina fuerza centrífuga. Si tal observador pretende identi…car ma0 con la noción de una fuerza F’, debe agregarle a las fuerzas verdaderas, las denominadas fuerzas de inercia o aparentes: no surgen de procesos de interacción sino del hecho de observar los fenómenos desde un sistema no inercial. Fc entr La fuerza centrífuga está dirigida hacia afuera. 11 v’ F Coriolis La fuerza de Coriolis es perpendicular a ! y a v’ PEQUEÑO EJERCICIO: Si, en un dado t; r =yj; ! =! z k; entonces veri…car que i j !^r= 0 0 0 y k !z 0 = ! z yi y !^ (! ^ r) = +y! 2z j 4 (¡hacia afuera!). Movimiento relativo de un cuerpo respecto a la tierra Para dar idea de la importancia del formalismo desarrollado, consideremos un caso en donde, en primera instancia, podramos despreciar la fuerza de Coriolis: estudiaremos la desviación, respecto de la vertical, de un cuerpo que cae desde una cierta altura. Designemos con g0 la aceleración de la gravedad "verdadera", es decir, apuntando según la vertical del lugar y con g la aceleración medida por un observador sobre la tierra (en la dirección de la plomada). Este problema debe ser considerado con cuidado, teniendo en cuenta el hemisferio en el cual se encuentra el observador. De la ec. 16 escribimos 2! ! g = g0 v0 ! ! (! ! r) ; cuando se cumpla que j2! ! v0j << j! ! (! ! r)j ; lo que ocurre cuando la velocidad del cuerpo respecto del suelo es relativamente pequeña, v 0 !r=2; g donde al término ! ! g0 ! ! (! ! (! ! r) ; con g0 = g0 k r) se lo denomina acelaración centrífuga. 12 g 0 g Corte plano de la …gura anterior 13 0 Dado que la tierra gira alrededor del eje N-S, elegimos r =rk; siendo k perpendicular a la super…cie de la tierra en el lugar, de latitud , el ángulo entre ! ! y r valdrá =2 en N y =2 + en S. DEBE QUEDAR EN CLARO que no hemos elegido ! ! = !k sino (VER LA FIGURA SIGUIENTE...) ! ! = r = rk g0 = g0 k ! cos i+! sin k: Entonces ! ! i ! cos 0 r= j k 0 ! sin 0 r = !r cos j y ! ! (! ! r) i ! cos 0 = j 0 !r cos ! 2 r sin cos = k ! sin 0 i+ ! 2 r cos2 k 2 = ! r cos [sin i+ cos k] : Como vemos, j ! ! (! ! r)j = ! 2 r cos ; siendo r cos = R; el radio de la Tierra en la latitud : Además, g ya no tiene la dirección k sino también una componente según i: En el hemisferio norte, y como hemos elegido los ejes, la compontente i apunta hacia el sur. En el hemisferio sur, apunta hacia el norte. En suma, g = ! 2 r cos sin el ángulo g0 + ! 2 r cos2 i+ k; respecto de la vertical es muy pequeño tan = ! 2 r cos sin ( g0 + ! 2 r cos2 ) por lo cual g = jgj g0 ! 2 r cos2 : El término ! 2 r cos2 ; aunque pequeño, toma en cuenta la variación de g con la latitud, como es observado (gp olo 9:83 ms-2 ; gEc 9:78 ms-2 ). 5 Aceleración de Coriolis Ahora despreciaremos, antes que nada por simpli…cación, la aceleración centrífuga y consideraremos solamente la de Coriolis: ar ' g 2! ! vr : En el hemisferio norte, teniendo en cuenta que si el cuerpo se larga desde el reposo p desde una cierta altura z0 = 2h=g0 , tendremos vx ' 0 e vy ' 0 (¡se ha despreciado la aceleración centrífuga!), vz ' g0 t: Entonces 14 g 0 k j i Efecto de Coriolis ! ! vr = i ! cos 0 j k 0 ! sin 0 g0 t = !g0 t cos j y por lo tanto (ar )x (ar )y (ar )z ' 0 ' 2!g0 t cos ' g0 e integrando dos veces y (t) = 1 !g0 t3 cos 3 y z (t) = z0 g0 t2 = 2 s 2h g0 g0 t2 : 2 Por la forma en cómo hemos elegido el eje j, la desviación es hacia el este. 15 ω v r X aC X aC C v r Este término de aceleración de Coriolis permite explicar la desviación de un disparo de largo alcance, debido a la rotación de la Tierra. Anécdota bélica: durante la 1a Guerra Mundial sucedió una batalla naval entre barcos ingleses y alemanes en la zona de las Islas Malvinas. Los artilleros ingleses no podían hacer blanco sobre las naves enemigas, aunque los sistemas estaban preparados para tener en cuenta el efecto Coriolis...; el problema fue que las correcciones estaban calculadas para el Hemisferio Norte..! Ejercicio: desarrollar cualitativamente lo arriba mencionado. 5.1 Experimento de Foucault Consideremos las oscilaciones de un péndulo donde el movimiento de la masa puede considerarse horizontal; por simplicidad, puede suponerse que, en principio, oscila en uno cualquiera de los polos (véanse las …guras anteriores). Podemos …gurarnos que la masa del péndulo deja caer un …no chorro de arena que queda sobre el piso. Visto desde un observador inercial (tal vez en el centro del sistema solar) el péndulo oscila siempre sobre el mismo plano y la que rota es la Tierra. Visto desde ésta, pareciera que el plano del péndulo se está desviando. El plano 16 de oscilación rota en el sentido de las agujas del reloj en el hemisferio norte y en sentido antihorario en el hemisferio sur. Este experimento, fue llevado a cabo por primera vez en 1851 en París por Jean Leon Foucault; así, aunque la tierra estuviese siempre cubierta por nubes, el experimento habría demostrado que la tierra rota alrededor de su eje. 17