MÁQUINAS DE CORRIENTE ALTERNA A COLECTOR
Anuncio

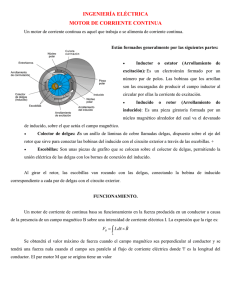
MÁQUINAS DE CORRIENTE ALTERNA A COLECTOR Norberto A. Lemozy 1 RESEÑA HISTÓRICA En el comienzo de las aplicaciones de la energía eléctrica, a final del siglo XIX, y debido a la gran influencia de Thomas Alba Edison (1847-1931), reinaba la corriente continua, se la empleaba principalmente para iluminación y en los primeros motores eléctricos utilizados por la industria. Pero también fue en esa época que George Westinghouse (1846-1914), con la colaboración de Nikola Tesla (1856-1943), empezó la promoción de la corriente alterna, con los resultados que hoy todos conocemos. Desde esa época, los motores de asincrónicos de corriente alterna, y a pesar de sus grandes ventajas constructivas, tardaron en imponerse a los de corriente continua, fundamentalmente por la dificultad de poder variar fácilmente su velocidad; cosa que es muy sencilla en estos últimos. Ante ese panorama no resulta sorprendente que se hayan desarrollado motores de corriente alterna que, a semejanza de los de corriente continua, poseen un colector y son de velocidad variable. Dentro de la diversidad de máquinas a colector que se desarrollaron, tanto de corriente continua como de corriente alterna, algunas continuaron empleándose hasta nuestros días. En el caso particular de las de corriente alterna, la más importante de todas es el motor serie a colector, en particular su versión monofásica. En el presente capítulo se estudiarán primero los motores serie, luego se analizará el motor repulsión monofásico y el motor trifásico Schrague, por considerar que son los más significativos. 1 MOTOR SERIE 1.1 Introducción Una de las principales aplicaciones de los motores de corriente continua es en tracción eléctrica, donde se emplean motores de excitación serie por ser los que poseen la característica externa que más se adapta a ese uso. Cuando a principio del siglo XX se fueron reemplazando gradualmente las líneas de distribución de corriente continua por las más eficientes de corriente alterna, se pensó también en utilizar en los ferrocarriles motores monofásicos serie de corriente alterna, a fin de eliminar la necesidad de emplear las estaciones convertidoras de corriente alterna a corriente continua, en las que originalmente se empleaban unos convertidores rotativos denominados conmutatrices, que son máquinas que resultan de la combinación de una de corriente continua con una máquina sincrónica y que en la actualidad están totalmente fuera de uso. Esas conmutatrices fueron reemplazadas por rectificadores, primero de cátodo de mercurio y en la actualidad de estado sólido que son mucho más económicos, pequeños y duraderos. Si a un motor de corriente continua de excitación serie o derivación se le invierte la polaridad de la fuente que lo alimenta no cambia el sentido de giro, ya que se invierten simultáneamente las corrientes de excitación y de inducido. Lo anterior hace pensar que si al motor se lo alimenta con corriente alterna, cuya polaridad cambia f veces por segundo, el motor podría funcionar normalmente, pero esta es una verdad a medias, en efecto, aun a frecuencias industriales aparecen 1 efectos que desmejoran el funcionamiento del motor, por ejemplo habría que hacer todo el circuito magnético laminado para reducir las pérdidas por corrientes parásitas, lo que no sería demasiado complejo. También entran en juego las reactancias de los circuitos las que no solamente dan lugar a potencias reactivas, que no se traducen en potencia mecánica, sino que también generas desfases entre las corrientes de ramas en paralelo de distinta constante de tiempo, como ser el circuito de excitación y de armadura de un motor derivación, lo que da lugar a una reducción de la cupla electromagnética. Esto último no ocurre en los motores de excitación serie, donde la corriente de excitación y la de armadura son la misma cosa y no existen desfases. Esa es la razón por la que no prosperaron los motores derivación de corriente alterna. Como se verá más adelante, en los motores de excitación serie, los problemas anteriores se pueden resolver convenientemente, pero hay un problema que no tiene una solución satisfactoria: es el de la conmutación. En efecto, en las máquinas de corriente continua la conmutación puede realizarse en forma casi perfecta, pero en las de corriente alterna esto no es posible; lo que obliga a un mayor mantenimiento y acorta la vida del colector; este es uno de los motivos principales por lo que estos motores no llegaron a reemplazar a los de corriente continua en tracción eléctrica. Si bien se han desarrollado motores serie trifásicos, éstos no encontraron aplicaciones prácticas y cayeron rápidamente en desuso. En cambio los monofásicos se han empleado en algunas líneas de ferrocarriles, principalmente europeas y han subsistido hasta nuestros días. Conviene señalar que, por razones prácticas, los ferrocarriles se alimentan a través de dos conductores ya sea con corriente continua o corriente alterna y por eso se estudiarán solamente los motores serie monofásicos. 1.2 Ecuaciones y fasoriales El esquema básico de un motor serie, monofásico, de corriente alterna es el mostrado en la figura 1. d Ff ; Φ f I Ef θ; Ω ; Te θe U Fa ; Φ a q q Ea t Ea r d Fig. 1. Motor serie básico. 2 Los estatores de los motores serie de potencia, como los utilizados en tracción eléctrica, y a diferencia de los de corriente continua, son laminados y cilíndricos, con el ranurado necesario para alojar al arrollamiento de excitación y a otros arrollamientos auxiliares, cuya función se verá más adelante. El arrollamiento de excitación suele ser distribuido y del tipo concéntrico. El rotor, es laminado y tiene un arrollamiento a colector convencional, de las mismas características de los usados en las máquinas de corriente continua. Al circular la corriente I = I f = I a por el motor de la figura 1: i = i f = ia = 2 I sin ω t [A] (1) Se desarrollan dos fuerzas magnetomotrices alternas, siendo el valor máximo espacial de la componente fundamental de excitación: 2 N sf ⋅ k wf I sin ω t [A] π 2 p (2) 2 N sa ⋅ k wa I sin ω t [A] π 2 p (3) 4 Fˆ f = y la de armadura: 4 Fˆa = Donde: Nsf : Nsa : Kwf y kwa : p: Número de espiras en serie de la excitación. Número de espiras en serie, entre escobillas, de la armadura. Factores de devanado de la excitación y de la armadura, respectivamente. Pares de polos. Como el inducido posee escobillas diametrales, el factor de distribución vale: k wa = k da = 2 π (4) Ambas fuerzas magnetomotrices están en fase en el tiempo y se encuentran en cuadratura en el espacio, por lo que desarrollan una cupla. La fuerza magnetomotriz de excitación da lugar al flujo de excitación, en el eje directo d-d, cuyo valor instantáneo es: Φ f = µ0 Dl ˆ ˆ f sin ω t [Wb] F =Φ pg f (5) De la misma forma el valor instantáneo del flujo de armadura, en el eje transversal q-q, vale: Φ a = µ0 Dl ˆ ˆ a sin ω t [Wb] Fa = Φ pg Donde: µ0 = 4 π 10-8 [H/m]. D : Diámetro en el entrehierro [m]. l : Longitud del rotor [m]. g : Entrehierro equivalente [m]. 3 (6) A estos flujos se los considera en fase con la corriente, despreciando el pequeño desfase que producen las pérdidas en el hierro. Esos flujos dan lugar a fuerzas electromotrices inducidas, por transformación, en los propios arrollamientos, cuyos valores eficaces son: Ef = 2π ˆ [V] f N sf k wf Φ f 2 (7) Eat = 2π ˆ [V] f N sa k wa Φ a 2 (8) Donde f es la frecuencia de la red. Estas fuerzas electromotrices de transformación adelantan 90º a los flujos que las producen. Además, y como ocurre en las máquinas de corriente continua, el flujo de excitación produce una fuerza electromotriz de rotación en el inducido: E ar = 2π ˆ sin θ [V] f r N sa k wa Φ f e 2 (9) La frecuencia de rotación fr es función de la velocidad de giro: fr = ωr p Ω p n = = [Hz] 2π 2π 60 (10) Donde: ωr : Velocidad angular en radianes eléctricos por segundo. Ω : Velocidad angular en radianes geométricos por segundo. n : Velocidad angular en rpm. Como ya se vio en [1], las fuerzas electromotrices de rotación están en contrafase con el flujo que las produce y dependen del seno del ángulo de escobillas, en este caso como el ángulo de escobillas vale -π/2, figura 1, su seno vale -1 y la fuerza electromotriz Ear resulta en fase con el flujo Φ f . Si a las fuerzas electromotrices anteriores se le suman las caídas de tensión en las reactancias de dispersión y en las resistencias se tiene la tensión aplicada U: U& = E& f + E& at + E& ar + ΣrI& + ΣjxI& [V] (11) Representando fasorialmente la ecuación (11), resulta la figura 2: Como ya se dijo, en el fasorial de la figura 2 se han supuesto los flujos de excitación Φf y de armadura Φa, en fase con la corriente I. La tensión de rotación en la armadura es la responsable de la potencia de campo Pc desarrollada por el motor, de la misma forma que en una máquina de corriente continua, resulta: Pc = E ra I = Te Ω [W] 4 (12) Σ rI E ar E at U Ef ϕ Ff ; Φ f Σ jxI I Fa ; Φ a Fig. 2. Diagrama fasorial del motor serie sin compensación. La potencia disponible en el eje será: Pm = Pc − Prot = Pc − PFe − Pryv [W] (13) Donde: Prot : PFe : Pryv : Pérdidas rotacionales [W]. Pérdidas en el hierro [W]. Pérdidas por rozamiento y ventilación [W]. La cupla electromagnética media Te se puede obtener de la ecuación (12) o también a partir de las ecuaciones generales para una máquina cilíndrica [2], como ser: Te = π 2 ∧ p 2 Φ f ⋅ Fa sin(Φ f Fa ) [Nm] (14) Además como el flujo de excitación se encuentra en el eje longitudinal y las escobillas, que determinan la dirección de la fuerza magnetomotriz de armadura, en el eje transversal, el ángulo entre ambas es de π/2 y el seno de la expresión (14), vale uno. Como el flujo de excitación y la fuerza magnetomotriz de armadura son alternos, la cupla dada por la expresión (14) es instantánea. Reemplazando en la ecuación (14) los valores instantáneos del flujo de excitación y de la fuerza magnetomotriz de armadura, dados por las ecuaciones (5) y (3) respectivamente, resulta: ˆ f I ⋅ sin 2 ω t [Nm] Te = 2 p N sa k wa Φ (15) Reemplazando el sin 2 ω t queda: Te = 2 ˆ f I ⋅ (1 − cos 2ω t ) [Nm] p N sa k wa Φ 2 (16) Expresión que muestra que la cupla electromagnética tiene un valor constante y una componente de doble frecuencia superpuesta. El valor medio de la cupla electromagnética instantánea dada por la ecuación (16) es: Te = 2 ˆ f I [Nm] p N sa k wa Φ 2 5 (17) Esta cupla se puede poner en función del número total de conductores del inducido Z y del número de pares de ramas en paralelo a del inducido: N sa = Z 4a (18) Reemplazando Nsa y kwa en la ecuación (17), resulta: Te = 1 Z p ˆ Φ f I [Nm] 2 2a π (19) Valor 2 veces menor que en una máquina de corriente continua que opere con el mismo flujo máximo y una corriente igual al valor eficaz de la alterna, lo que daría las mismas pérdidas en cobre. Pero en la práctica esto no es tan así [3] ya que si la corriente continua tiene el mismo valor eficaz que la alterna, el flujo máximo en alterna será 2 veces mayor que en continua y se compensará la pérdida de cupla, por lo menos a bajas corrientes donde no hay saturación. Como la fuerza magnetomotriz de armadura es proporcional a la corriente y, suponiendo linealidad, el flujo de excitación también lo es, la cupla resulta proporcional al cuadrado de la corriente, como es característico en los motores serie. 1.3 Compensación Observando el fasorial de la figura 2, se puede ver que hay importantes caídas de tensión en cuadratura con la corriente, que aumentan la potencia reactiva, bajan el factor de potencia y no contribuyen a la potencia mecánica. Para resolver este inconveniente se pueden realizar varias acciones, la más sencilla y eficaz es colocar en el estator un arrollamiento compensador que genere un fuerza magnetomotriz igual y opuesta a la de armadura para anular el flujo transversal Φa con lo que se elimina la fuerza electromotriz Eat y se mejora considerablemente la situación. Si el arrollamiento compensador se conecta en serie con el inducido, se dice que la compensación es conductiva y resulta como se muestra en la figura 3. d I Ff ; Φ f θ; Ω ; Te θe U Fa Fc q q d Fig. 3. Motor serie con compensación conductiva. 6 Como la corriente en el arrollamiento compensador es la misma que en el inducido, para que las fuerzas magnetomotrices sean iguales, se deberá cumplir que ambos tengan la misma cantidad de espiras efectivas, es decir: N sa ⋅ k wa = N sc ⋅ k wc (20) Otra forma de lograr el mismo efecto en inductivamente, colocando en el eje transversal un arrollamiento en cortocircuito, como se muestra en la figura 4. En este caso el inducido se comporta como el primario de un transformador y el arrollamiento compensador como un secundario en cortocircuito y las fuerzas magnetomotrices desarrolladas por ambos serán iguales y opuestas, independientemente del número de espiras, lo que da mayor flexibilidad en el diseño del arrollamiento compensador. d I Ff ; Φ f θ; Ω ; Te θe U Fa Fc q q Ic d Fig. 4. Motor serie con compensación inductiva. En este caso se cumple que: I a ⋅ N sa k wa = I c ⋅ N sc ⋅ k wc [A] (21) Y la corriente en el arrollamiento compensador depende de la relación de espiras efectivas. En ambos casos el arrollamiento compensador suele ser distribuido y del tipo concéntrico. Si el motor serie está compensado, la ecuación de tensiones resulta: U& = E& f + E& ar + ΣrI& + ΣjxI& [V] (22) En ambos casos el arrollamiento compensador aporta resistencia y reactancia de dispersión al circuito serie. Si la compensación es inductiva, el arrollamiento compensador, al quedar referido al inducido, también aporta a las sumatorias de resistencias y de reactancias de dispersión. El diagrama fasorial de un motor compensado es el de la figura 5. El hecho de que en un motor serie compensado la fuerza magnetomotriz resultante en el eje transversal, sea prácticamente nula, no significa que también se anula la cupla electromagnética, en cuyo caso el motor dejaría de funcionar. En efecto la fuerza magnetomotriz de armadura sigue existiendo y con el flujo de excitación desarrollan la cupla electromagnética que hace girar al 7 rotor de la máquina. Entre la fuerza magnetomotriz de compensación y el flujo de excitación también se desarrolla una cupla electromagnética, pero la misma está entre dos arrollamientos estatóricos que no tienen posibilidad de movimientos relativos. Σ rI E ar Ef ϕ Σ jxI U = cte. I = cte. Ff ; Φ f Fig. 5. Diagrama fasorial del motor serie con compensación. Como todas las caídas de tensión reactivas del diagrama fasorial son función de la frecuencia de la red, otra forma empleada para reducir la potencia reactiva y mejorar el factor de potencia del motor serie, es bajar la frecuencia de la tensión de alimentación. Esto parece una solución poco práctica, especialmente teniendo en cuenta que en la época en que estas cosas empezaron a hacerse, no existían convertidores electrónicos; pero como se aplicó a los ferrocarriles que, como es normal, tienen sus redes de alimentación propias, el cambio de frecuencia no afecta a otros usuarios. En ferrocarriles de la costa este de Estados Unidos y de Europa se emplearon frecuencias de 25 Hz (50/2) y 16 ⅔ Hz (50/3); frecuencias más bajas no se podían usar porque el parpadeo (flicker) de las lámparas incandescentes era muy notorio. Aún en la actualidad hay servicios ferroviarios alimentados con esas frecuencias. Bajar la frecuencia de alimentación es aproximar el funcionamiento del motor de CA al motor de CC, que sin duda lo hace mejor. 1.4 Características externas y control de la velocidad Como ya se dijo, la característica externa del motor serie de CA es la típica de los motores serie, con una forma casi hiperbólica, lo que da una potencia de salida aproximadamente constante. Figura 6. 160 140 Velocidad % 120 100% 100 80% 60% 80 50% 40% 60 40 20 0 0 20 40 60 80 100 120 140 160 Cupla % Fig. 6. Característica externa a varias tensiones. 8 El control de la velocidad se hace reduciendo la tensión aplicada al motor, figura 6 ó intercalando resistencias en serie, figura 7. En ambos casos se reduce la velocidad de giro. 160 140 Velocidad % 120 R=0 100 R1 R2>R1 80 60 R3>R2 40 20 0 0 20 40 60 80 100 120 140 160 Cupla % Fig. 7. Característica externa con resistencia serie. La reducción de la tensión aplicada es la forma más empleada para reducir la velocidad y el efecto en el motor se puede observar en el diagrama fasorial. A continuación se analiza el caso de un motor compensado y a fin de reducir las variables se puede suponer que el motor opera a cupla constante, que en un motor serie es sinónimo de flujo y corriente constantes y por lo tanto la suma de las caídas de tensión, desde el origen hasta el punto A permanecerán constantes, entonces al reducir la tensión debe reducirse el módulo de la tensión de rotación de armadura Ear, que a flujo de excitación constante, implica una reducción de la velocidad, figura 8. Se puede observar que al reducirse la velocidad empeora el factor de potencia, ya que predominan las caídas reactivas. E ar Σ rI A Ef ϕ Σ jxI O U I = cte. Ff ; Φ f = ctes. Fig. 8. Fasorial para distintas tensiones y cupla constante. Si la tensión aplicada no alcanza a cubrir las caídas de tensión, se debe interpretar como que con esa tensión el motor no es capaz de desarrollar esa cupla. En forma semejante se puede analizar el efecto de agregar resistencia en serie: en este caso aumentan las caídas resistivas y se reduce la tensión de rotación de armadura, figura 9. 9 Σ rI E ar A Ef U = cte. ϕ = cte. I = cte. Σ jxI O Ff ; Φ f = ctes. Fig. 9. Fasorial para distintas resistencias y cupla constante. 1.5 Conmutación El talón de Aquiles de los motores de corriente alterna a colector es, sin duda, la conmutación, y esa es la razón de su uso limitado. Cuando las bobinas pasan por el eje transversal, donde se encuentran las escobillas, en un tiempo muy breve, se debe invertir el sentido de circulación de la corriente; como ya se estudió en la máquina de corriente continua, el tiempo de conmutación Tc vale: Tc = be [s] vc (23) Donde: be : Ancho de la escobilla [m]. vc : Velocidad tangencial en la superficie del colector [m/s]. Por ejemplo, en un motor serie de 4 polos 50Hz que gira a 3.000 rpm (una vuelta por ciclo), las bobinas conmutan cuatro veces por vuelta, es decir cuatro veces por cada ciclo de la corriente, si el colector tiene 200 delgas y el ancho de cada escobilla corresponde al de dos delgas, el tiempo de conmutación resulta de 0,2 ms, cien veces menor que el período de la corriente. Al invertirse el sentido de circulación de la corriente por la bobina que está conmutando, y debido a la inductancia de dispersión de la propia bobina y a las inductancias mutuas con otras bobinas que también están conmutando, aparece la denominada tensión de reactancia, ex , cuyo valor es proporcional a la velocidad de giro y al valor de la corriente. La tensión de reactancia se opone a la variación de la corriente en la bobina, retrasa la conmutación, aumenta la densidad de corriente en el borde de fuga de la escobilla y da lugar a chispas. Esa tensión de reactancia se puede compensar con una tensión de rotación, también proporcional a la velocidad de giro y al valor de la corriente, producida por el flujo de los polos de conmutación, ubicados en el eje transversal y recorridos por la corriente de armadura. En las máquinas de corriente continua los polos auxiliares compensan la tensión de reactancia muy eficientemente y pueden operar con cualquier estado de carga, conmutando prácticamente sin chispas; pero en el motor serie de corriente alterna además de la tensión de reactancia, en las espiras que están conmutando aparece una tensión de transformación, figura 10. En la figura 10 se ve como las bobinas que están conmutando concatenan prácticamente la totalidad del flujo alterno de excitación, el que induce en ellas una tensión de transformación independiente de la velocidad giro y que los polos auxiliares no pueden compensar para todas las velocidades de funcionamiento del motor, a lo sumo lo pueden hacer para una dada velocidad de rotación. 10 d Ff ; Φ f q q d Fig. 10. Bobinas conmutando. Como en los motores serie la velocidad varía entre límites muy grandes, la mayoría de las veces conmutan con chispas, las que inevitablemente erosionan el colector, obligan a un mantenimiento frecuente y encarece su uso. Esa es la razón principal por la que no prosperó su aplicación en el transporte ferroviario donde se siguieron utilizando los motores serie de corriente continua. Es interesante observar que al bajar la frecuencia de la tensión de alimentación, también se reduce la tensión de transformación inducida en las espiras que están conmutando, y el motor opera en mejores condiciones. Ese es otro de los motivos por los que se emplearon redes de baja frecuencia para alimentar a los ferrocarriles. 2 MOTOR UNIVERSAL 2.1 Introducción Si bien en la actualidad los motores monofásicos serie, de potencia elevada, solamente se emplean en algunos pocos ferrocarriles que operan desde hace bastante tiempo; sus versiones de pequeña potencia, son muy utilizados y en una gran diversidad de aplicaciones. Como estos motores pueden operar tanto en corriente alterna como en corriente continua, se los denominó universales. En la actualidad solamente se los usa en corriente alterna y se emplean en herramientas de mano (taladros, amoladoras, sierras, etc.) y muchos electrodomésticos (batidoras, procesadoras, licuadoras, aspiradoras de polvo, etc.). Como el volumen de un motor está más relacionado con la cupla, que con la potencia desarrollada; un motor de poco volumen y poca cupla que gire a gran velocidad, puede entregar una potencia mecánica importante. Los motores universales, que giran a 10.000 o más rpm, pueden desarrollar una potencia mecánica importante, por ejemplo superar el kilowatt, con un volumen reducido. Comparados con los motores de uso industrial, la mayoría de los motores universales tienen una vida útil mucho más limitada, pero como los artefactos en los que se los usa no tienen un uso muy frecuente y son de relativamente bajo costo, terminan amortizándose de manera muy económica. 11 Como tanto en las herramientas eléctricas de mano como en los electrodomésticos, el costo del motor puede ser un porcentaje importante del costo total, es importante simplificar la construcción del mismo para abaratarlo; por tal motivo, los motores universales se los construye con polos salientes en el estator y arrollamientos de excitación concentrados, es decir más parecidos a las máquinas de corriente continua. Por el mismo motivo, estos motores no poseen polos auxiliares ni arrollamiento compensador. En la figura 11 se muestra una forma constructiva típica de estos motores universales. d Arrollamientos de Excitación Polos de Excitación Expansión Polar q Arrollamiento de Inducido q Inducido Carcasa d Fig. 11. Motor universal. 2.2 Características externas y control de la velocidad Las características externas de un motor universal son como las mostradas en la figura 6 y la velocidad también se ajusta variando la tensión aplicada. En la actualidad, el control de la tensión se hace en forma electrónica y se emplean circuitos muy sencillos y económicos que recortan los semiciclo de la tensión de la red por medio de un “triac”, una posible configuración es la mostrada en la figura 12. T a1 a2 g D R C M Fig. 12. Control electrónico de la velocidad. Donde: M Motor; T Triac; D Diac; R Potenciómetro y C Capacitor. 2.3 Compensación 12 La mayoría de los motores universales no tienen compensación de la fuerza magnetomotriz de armadura, pero en algunos casos se toman medidas para reducir el flujo en el eje transversal. Debido al gran entrehierro presente en el eje transversal, el flujo se cierra principalmente a través de las expansiones polares y se lo puede reducir colocando una ranura abierta en el eje del polo, como se muestra en la figura 13, donde se indica el flujo producido solamente por Ia. d Fa Ia q q d Fig. 13. Ranura en el polo. También es posible colocar dos espiras en cortocircuito en esas ranuras para que creen una compensación inductiva, que opera solamente en corriente alterna, figura 14. d q q d Fig. 14. Compensación inductiva en el motor universal. 13 3 MOTOR REPULSIÓN 3.1 Introducción El denominado motor de repulsión es un ingeniosa variante del motor serie, ya estudiado, en el que la corriente de la armadura está creada inductivamente. En el motor serie básico de la figura 1, la que por comodidad se vuelve a repetir con el número 15, la corriente del inducido se puede crear inductivamente colocando otro arrollamiento de excitación en el eje transversa y cortocircuitando las escobillas, como se muestra en la figura 16. d I Ff θ; Ω ; Te θe U Fa q q d Fig. 15. Motor serie básico. d Ffd I Ff θe θ; Ω ; Te U q q Ffq Fa Ia d Fig. 16. Motor con la corriente de armadura creada inductivamente. 14 Por lo dicho este motor no podría operar con corriente continua. En lugar de tener dos arrollamientos de excitación se puede colocar uno sólo en la dirección de la fuerza magnetomotriz de excitación resultante, como se muestra en la figura 17. d Ffd I Ff U θ; Ω ; Te q q Ffq Fa Ia d Fig. 17. Motor con un solo arrollamiento de excitación. En la figura 18 se muestra el motor repulsión con los ejes longitudinal y transversal reubicados y definiendo un nuevo ángulo de escobillas θ e' como el suplemento de θ e para que resulte menor a 90 grados eléctricos. d I Ff ; Φ f U θ'e θ; Ω ; Te θe q q Ia Fa ; Φ a d Fig. 18. Motor repulsión. 15 3.2 Características externas y control de la velocidad Variando el ángulo de escobillas, varía la cupla electromagnética desarrollada y consecuentemente la velocidad. En la figura 19 se muestra la variación de la cupla. El máximo se aproximadamente para θ e' ≅ π 6 = 30° . 40 Zona de trabajo Cupla 30 20 10 0 0 20 40 60 80 100 Ángulo de escobillas Fig. 19. Variación de la cupla con el ángulo de escobillas. Cuando el ángulo de escobillas es cero, el motor se comporta como un transformador en cortocircuito, absorbe mucha corriente de la red y no desarrolla cupla porque las fuerzas magnetomotrices de excitación y de armadura están alineadas. Figura 20. d Ff ; Φ f I cc U θ'e = 0 Te = 0 q q I acc d Facc Fig. 20. Motor con θ e' = 0 . 16 Cuando el ángulo de escobillas es 90 grados, el motor se comporta como un transformador en vacío, absorbe una pequeña corriente magnetizante y tampoco desarrolla cupla porque no hay corriente en el inducido. Figura 21. d I0 Ff ; Φ f U Te = 0 θ'e = π/2 Fa = 0 q q Ia = 0 d Fig. 21. Motor con θ e' = π 2 . Al motor se lo arranca con las escobillas a 90° y luego se va reduciendo ese ángulo con lo que crecen la cupla y la velocidad hasta llegar aproximadamente a los 30°, donde se tiene el máximo de ambas. Es decir que la velocidad se controla mecánicamente variando el ángulo de escobillas. En la figura 22 se muestran las características externas para dos ángulos de escobillas. 140 Velocidad % 120 100 θ = 24° 80 θ = 34° θ = 45° 60 40 20 0 0 20 40 60 80 100 120 Cupla % Fig. 22. Características externas. 17 140 En su momento, estos motores se emplearon en electrodomésticos que requerían velocidad variable, como ser batidoras, pero con el advenimiento de los semiconductores de potencia, actualmente es más sencillo y económico utilizar un motor universal y un variador de tensión, del tipo mostrado en la figura 12, que el mecanismo para mover las escobillas de un motor repulsión, esa en una de las razones por las que los motores repulsión han caído en desuso. Si bien el descripto es el motor repulsión más sencillo y usado, se han realizado unas cuantas variantes del mismo y con distintas características [3], pero han tenido muy pocas aplicaciones y no llegaron a nuestros días. 4 MOTOR SCHRAGE 4.1. Introducción De todas las máquinas a colector trifásicas de corriente alterna, sin duda la que más éxito tuvo fue el motor de velocidad variable, denominado motor Schrage en homenaje a su inventor. Si bien este motor subsistió hasta nuestros días, no obstante en la actualidad, son ventajosamente reemplazados por los motores asincrónicos de rotor en cortocircuito alimentados con variadores electrónicos de la velocidad. Un poco de historia, Hidde Klass Schrage, hijo de Hindrik Schrage y de Hilje Westerdijk, nace el 15 de febrero 1883, en Usquert, en el municipio de Eemsmond, de la provincia de Groningen en la parte norte del Reino de los Paices Bajos. Como Ingeniero Mecánico trabajó en la AEG (Allgemeine Elektrizitaets-Gesellschaft) de Berlin, en la ASEA (Allmänna Svenska Elektriska Aktiebolaget) de Estokolmo, en Baden-Baden y en París, donde se casó el 6 de marzo 1924 con Anna Elisabeth de Haas. El 2 de diciembre de 1913 Hidde Klaas Schrage, que en ese entonces trabajaba en la compañía ASEA de Vesterâs, Suecia, patenta en la oficina norteamericana de patentes el motor a colector, de velocidad variable, hoy conocido como Motor Schrage. En la figura 23 se muestra el encabezado de dicha patente: Fig. 23. Una de las patente del motor Schrage. 18 4.2. Control de la velocidad de un motor asincrónico Si de la expresión del resbalamiento (24) de una máquina se inducción, se despeja la velocidad resulta (25): Ω −Ω s= s (24) Ωs Ω = Ω s (1 − s ) = 2πf (1 − s ) [1/s] p (25) Donde: s: Resbalamiento [°/1] Ω: Velocidad de rotación [1/s] Ωs: Velocidad sincrónica [1/s] f: Frecuencia [Hz] p: Pares de polos En la expresión (25) se puede ver que las variables son: la frecuencia, la cantidad de polos y el resbalamiento. Control de la frecuencia: por este medio se puede conseguir una variación continua de la velocidad, dentro de límites muy amplios. Como no es sencillo obtener una tensión de frecuencia variable, este procedimiento recién se pudo aplicar en forma económica cuando se desarrollaron semiconductores de potencia de bajo costo y, sin duda, es la mejor forma de controlar la velocidad y la que mayores posibilidades presenta. Cambio del número de polos: como los polos magnéticos se presentan de a pares, este procedimiento no produce una variación continua de la velocidad; lo que da lugar a motores de dos, tres o más velocidades, que pueden ser muy útiles para muchas aplicaciones. El cambio de la polaridad se consigue cambiando las conexiones del arrollamiento estatórico y utilizando un rotor en cortocircuito. Control del resbalamiento: existen varias formas de controlar el resbalamiento de una máquina de inducción, por ejemplo bajando la tensión aplicada a un motor de rotor en cortocircuito, baja la cupla y aumenta el resbalamiento. Si bien la reducción de velocidad obtenida no es muy importante, este procedimiento es común utilizarlo en pequeños ventiladores. Las otras formas de controlar el resbalamiento se aplican a motores con rotor bobinado, lo que de por sí es más costoso. En general consisten en extraer potencia eléctrica de los bornes del rotor, esa potencia se puede disipar en un reóstato rotórico, transformar en mecánica y agregarla al eje del motor (cascada Krämer) o devolverla a la red (cascada Scherbius). Estos dos últimos procedimientos no son simples y se han resuelto con grupos de máquinas, y actualmente están en desuso, auque existen una variante electrónica de la cascada Sherbius. La forma propuesta por Schrage es una variante en la que el intercambio de potencia con el rotor se hace desde una fuente que inyecta una tensión de la frecuencia adecuada al resbalamiento. El principio es el siguiente, si se considera una fase rotórica, de un motor de inducción, sin referir al estator y se le coloca una fuente en serie, resulta el circuito equivalente de la figura 24. 19 + s E2 I2 sx2 r2 f2 = s f1 + Ei − − Fig. 24. Circuito equivalente de una fase rotórica. Aplicando la segunda ley de Kirhhoff se tiene: E& 2 s = sE& 2 = E& i + (r2 + jsx 2 ) I&2 [V] (26) Donde: E2s: Tensión inducida para el resbalamiento s. E2: Tensión inducida a rotor detenido (constante). Ei: Tensión inyectada. r2: Resistencia rotórica. x2: Reactancia de dispersión rotórica a frecuencia de red. Si la máquina está en vacío la corriente I2 y la caída por ella producida se pueden despreciar, resultando aproximadamente: sE& 2 ≅ E& i [V] (27) De donde, trabajando con los módulos, el resbalamiento resulta: s≅ Ei E2 (28) O sea que el resbalamiento es aproximadamente proporcional al módulo de la tensión inyectada. Una tensión inyectada nula, rotor en cortocircuito, da un resbalamiento próximo a cero que es el caso normal de funcionamiento de un motor de inducción. Una tensión inyectada positiva, del sentido indicado en la figura 24, da un resbalamiento positivo, es decir una velocidad subsincrónica. Una tensión inyectada negativa, es decir opuesta a la indicada en esa figura 2, da un resbalamiento negativo, es decir una velocidad hipersincrónica. El principal inconveniente para aplicar este procedimiento consiste en que la tensión inyectada, en todo momento, debe tener la frecuencia de resbalamiento: f 2 s = s ⋅ f1 [Hz] (29) 4.3 Obtención de la tensión a inyectar en el motor Schrage Sin duda la forma en que Schrage resolvió la forma de obtener la tensión Ei es lo más ingenioso de este motor: esa tensión se obtiene del propio motor y no son necesario máquinas adicionales como en las cascadas Krämer o Scherbius [3]. A fin de comprender este proceso considérese un motor asincrónico trifásico, con rotor bobinado, que se lo alimenta a través de los anillos rotóricos y se cortocircuita el estator, es decir al revés de lo habitual. En esas condiciones, el campo giratorio producido por el rotor trata de mover al estator, como éste está fijo, por reacción, es el rotor el que se mueve en sentido contrario. Figura 25. 20 ω − ω r= s ω = ω c Φ ω f1 ⁄⁄⁄ ωr Fig. 25. Motor asincrónico alimentado por el rotor. En la figura 25 se puede observar que el campo giratorio rota a velocidad sincrónica ω , respecto del propio rotor, que el rotor gira en sentido contrario al campo y a una velocidad menor ωr < ω (considerando los módulos). Entonces y respecto a un sistema de referencia fijo, como el estator, el campo giratorio rotará a la diferencia de velocidades ω - ωr que vale: ω − ω r = ω − ω (1 − s ) = sω [1/s] (30) Para independizarse del número de polos, se tomaron todas las velocidades angulares en radianes eléctricos por segundo. Si al rotor se le agrega un arrollamiento a colector en un par de escobillas aparecerá una tensión de las siguientes características. La frecuencia depende de la velocidad de rotación del campo giratorio respecto a un sistema de referencia fijo como el de las escobillas: fe = ω c s ⋅ 2πf = = sf = f s [Hz] 2π 2π (31) Es decir que la tensión de escobillas tiene siempre la frecuencia de resbalamiento, independientemente de la velocidad del rotor. El módulo de la tensión depende de la separación de las escobillas y será máximo para escobillas diametrales. Si las escobillas están formando un ángulo 2β la relación entre las tensiones vale: Tensión para escobillas a 2β = senβ (32) Tensión en escobillas diametrales O sea que variando la separación de las escobillas se varía el módulo de la tensión lo que producirá el cambio de la velocidad del motor. 21 La fase de la tensión depende de la posición de las escobillas, moviendo todas las escobillas en sentido contrario al del campo giratorio un ángulo ρ la tensión en escobillas se adelanta en ese mismo ángulo. Se entienden ángulos eléctricos. En la mayoría de los casos ese arrollamiento a colector es independiente del arrollamiento que se conecta a la red, compartiendo las mismas ranuras rotóricas. Si bien el rotor gira, ambos arrollamientos permanecen estacionarios entre sí, constituyendo un transformador, y son recorridos por corrientes de frecuencia de red f1 . 4.4 Esquema eléctrico Para obtener un sistema trifásico de tensiones se colocan, en una máquina de dos polos, tres pares de escobillas a 120 grados entre sí las que se conectan a las tres fases estatóricas (secundario), como se muestra en la figura 26. ω − ω r= s ω = ω c Φ Secundario (Estator) Terciario (Rotor) 2β f1 ⁄⁄⁄ Red ωr Primario (Rotor) Fig. 26. Esquema eléctrico del motor. Para variar el ángulo 2β entre las escobillas, hay un mecanismo que permite moverlas en sentidos opuestos, manteniendo los ejes magnéticos en la misma posición espacial. Para lograrlo las escobillas se colocan sobre dos aros porta escobillas que se mueven en sentidos opuestos. En el esquema de la figura 26 las escobillas sombreadas estarían en uno de esos aros y las restantes en el otro aro. Es común que las tres fases rotóricas, que reciben la alimentación de la red a través de tres anillos rozantes, se pueden conectar en estrella o en triángulo. A ese circuito de la máquina se lo denomina comúnmente primario, al arrollamiento estatórico se lo denomina secundario y al arrollamiento a colector terciario. Si bien las conexiones a las delgas del colector se podrían hacer desde el mismo arrollamiento primario, es decir utilizar el mismo arrollamiento para las dos funciones; como ya se dijo, es conveniente colocar el terciario, que junto al arrollamiento primario, se comportan como un transformador reductor de tensión; esto permite reducir la cantidad de espiras del terciario y hacer sus bobinas de una sola espira, lo que si bien aumenta la corriente del secundario y del terciario, 22 facilita la conmutación y reduce el número de delgas del colector [3]. Como los bobinados primario y terciario se encuentran alojados en las mismas ranuras del rotor, aumentan su tamaño y consecuentemente la reactancia de dispersión, baja el factor de potencia y empeora la regulación de la velocidad. 4.5 Diagramas fasoriales En los puntos siguientes se muestran los diagramas fasoriales, para distintos valores del ángulo de escobillas 2β , correspondientes al circuito equivalente rotórico, no referido, de la figura 24 y a su ecuación 26. A fin de limitar las variables en los diagramas se supone que los mismos están a cupla constante. En efecto, la cupla electromagnética se puede poner como en la ecuación (14): Te = π 2 ∧ p 2 Φ ⋅ F2 sin(Φ F 2 ) [Nm] (33) Como a tensión de alimentación y frecuencia constantes se puede suponer que el valor del flujo giratorio Φ resulta prácticamente constante y como la fuerza magnetomotriz F2 es proporcional a I2, tiene la misma dirección y con sentido contrario, por la convención generadora usada en el secundario; figura 27, el seno de la expresión (33), resulta: ∧ (34) sin(Φ F 2 ) = sin(90 + ψ 2 ) = cosψ 2 Por lo tanto la cupla electromagnética resulta proporcional a la proyección de la corriente I2 sobre la fuerza electromotriz E2 y permanece prácticamente constante. Te ∝ I 2 cosψ 2 = cte. [Nm] (35) Otro tanto ocurre con la caída r2 I2. E 1= E'2 ≈ U1 = cte. I'2 ψ2 cte. r'2 I' 2 cte. 90° F2 ψ2 Φ ≈ cte. cte. Fig. 27. Fasorial simplificado de un motor de inducción con cupla constante. 4.5.1 Funcionamiento con β = 0 En la figura 28 se muestra el fasorial correspondiente al caso en que las escobillas están superpuestas sobre la misma delga, es decir la tensión inyectada Ei es nula. En esas condiciones el motor se comporta como un motor asincrónico convencional, operando con el rotor en 23 cortocircuito. El resbalamiento s y la frecuencia secundaria f2 son muy bajos y, consecuentemente la caída en la reactancia de dispersión jsx2I2 y el ángulo ψ 2 son muy pequeños. ω 2= s ω 1 ≈ 0 ωc ≈ 0 I2 jsx 2 I 2 β=0 Ei = 0 s≈0 Ω ≈ Ωs cte. sE 2 r2 I 2 ψ2 Φ 2β = 0 cte. Fig. 28. Fasorial rotórico sin tensión inyectada. 4.5.2 Funcionamiento con β positivo En este caso la tensión inyectada tiene el sentido mostrado en el circuito equivalente de la figura 24 y se la supone en fase con la tensión inducida E2 , para lo cual el eje magnético de cada fase secundaria debe coincidir con el eje magnético definido por las escobillas a la que está conectada, como se muestra en la figura 29. Cabe recordar que, como se vio al estudiar el motor trifásico de inducción, el módulo de la tensión inducida E2 es constante, ya que corresponde al valor que se tiene cuando el rotor está detenido y el circuito secundario abierto. En el fasorial se puede observar, que debido a la presencia de la tensión inyectada Ei , el módulo de la tensión inducida sE2 es mayor que el de la figura 28, lo que implica un mayor resbalamiento, es decir velocidades subsincrónicas. Debido al mayor resbalamiento, también es grande la frecuencia en el secundario y la caída en la reactancia de dispersión, lo que aumenta el ángulo ψ2 y retrasa la corriente I2 lo que baja el factor de potencia del motor a esas velocidades. ω2 = s ω1 sE 2 Ei ωc I2 Φ 2β jsx 2 I 2 ψ2 cte. r2 I 2 cte. β>0 Ei > 0 s>0 Ω < Ωs Fig. 29. Fasorial rotórico en subsincronismo. 24 4.5.3 Funcionamiento con β negativo Si se mueven las escobillas de forma tal que éstas queden permutadas, como se muestra en la figura 30, se invierte la polaridad de la tensión inyectada y el fasorial muestra que la tensión sE2 queda invertida, lo que significa que el resbalamiento es negativo y velocidad hipersincrónica. Como el fasorial de la figura 30 no está referido, es decir está a la frecuencia de resbalamiento f2 = s f1, se debe tener en cuenta que los fasores del mismo giran en sentido contrario a lo habitual y la que corriente I2 sigue estando atrasada de la fuerza electromotriz E2 en el ángulo ψ 2 y lo mismo ocurre con la caída de tensión en la reactancia de dispersión jsx2I2 que adelanta 90° a la corriente. Como se puede ver en el fasorial, el factor de potencia a velocidades hipersincrónicas es mejor que a velocidades subsincrónicas. También es interesante observar que en velocidades subsincrónicas, el campo giratorio rota en sentido contrario al rotor y a velocidades hipersincrónicas lo hace en el mismo sentido. Si se ajusta la posición de las escobillas, con un pequeño β negativo, como para que el rotor gire exactamente a la velocidad sincrónica, el flujo permanecerá fijo en el espacio y en las escobillas se tendrá una pequeña tensión continua. ω2 = s ω1 I2 jsx 2 I 2 r2 I 2 ψ2 cte. Φ 2β cte. ωc β<0 Ei < 0 s<0 Ω > Ωs sE 2 E i Fig. 30. Fasorial rotórico en hipersincronismo. 4.5.4 Modificación del ángulo ρ La mayoría de los motores Schrage tienen la posibilidad de ajustar, en fábrica, la posición de todo el conjunto de escobillas, lo que modifica la fase de la tensión inyectada al secundario. Normalmente, y como en los casos anteriores, esa tensión inyectada se la ajusta para que quede en fase con la fuerza electromotriz inducida E2 . Al ángulo de fase entre ambas tensiones se acostumbra a designarlo con ρ Para verificar que el ángulo ρ sea nulo, se puede hacer funcionar al motor en ambos sentidos de giro, si al hacerlo mantiene la misma velocidad, ese ángulo será nulo. Pero en algunos casos conviene modificar el ángulo ρ para mejorar el factor se potencia a velocidades subsincrónicas, que como ya se dijo, suele ser bastante bajo. En efecto si se adelanta la tensión inyectada, para lo cual hay que mover todas las escobillas en el mismo sentido en el que gira el rotor y en contra del sentido de giro del campo rotante, 25 como se muestra en la figura 31, se reduce el ángulo ψ 2 y mejora el factor de potencia. Pero esta no es una solución ideal, ya que si se cambia el sentido de giro del motor el ángulo ρ cambia de signo y la situación se invierte. O sea que este procedimiento solamente es aplicable a motores que no cambian su sentido de giro. La modificación del ángulo ρ también tiene un pequeño efecto en la velocidad, el resbalamiento correspondiente a la figura 31 es un poco menor que el de la figura 29. ρ ω2 = s ω1 Ei sE 2 2β ρ ωc I2 ρ Φ cte. jsx 2 I2 ψ2 r2 I 2 cte. β>0 ρ>0 Ei > 0 s>0 Ω < Ωs Fig. 31. Fasorial rotórico en subsincronismo con Ei adelantada. 4.6 Características externas Las características externas del motor Schrage son las típicas de un motor de inducción trifásico, auque el resbalamiento nominal, es decir la regulación, es un tanto mayor que en éstos; fundamentalmente debido a las mayores dimensiones de las ranuras rotóricas que deben alojar a los arrollamientos primario y terciario, lo que aumenta la reactancia de dispersión y las caídas de tensión. 160 140 Velocidad % 120 100 β = − 90° β = 0° β = 90° 80 60 40 20 0 0 20 40 60 80 100 120 140 160 Cupla % Fig. 32. Características externas. 26 Como se muestra en la figura 32, el rango de variación de velocidad que se logra es aproximadamente desde 0,5 a 1,5 veces la velocidad sincrónica. El principal inconveniente del motor Schrage es su complejidad, lo que aumenta su costo y el mantenimiento. 5 REFERENCIAS [1] [2] [3] Norberto A. Lemozy: “Fuerzas magnetomotrices, Electromotrices y Cupla en Inducido a Colector”. Apunte de Cátedra. 1997. Norberto A. Lemozy: “Cupla en Máquina Cilíndrica”. Apunte de Cátedra. 2001. E. Openshaw Taylor: “The Performance and Desingn of A.C. Conmutator Motors” Editorial Pitman, 1958. 5 BIBLIOGRAFÍA Manuel Cortes Cherta: “Curso Moderno de Máquinas Eléctricas Rotativas” Tomo IV: “Máquinas sincrónicas y Motores de C. A. de Colector” Editores técnicos Asociados, 1977. G. S. Brosan y J. T. Hayden: “Advanced Electrical Power and Machines” Editorial Pitman, 1966. M. Kostenko y L. Piotrovsky: “Máquinas Eléctricas” Tomo II, Editorial Montaner Simon S. A. 1968. Ing. Norberto A. Lemozy 2009 27