Práctica 12. Péndulo compuesto
Anuncio

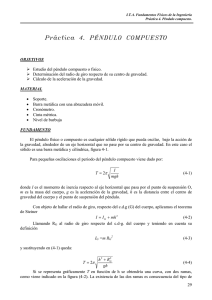
PÉNDULO COMPUESTO OBJETIVO Estudio experimental del péndulo compuesto o físico y determinación mediante éste de la aceleración de la gravedad. Estudiando el concepto de momento de inercia y su relación con otros conceptos dinámicos. FUNDAMENTO TEÓRICO Un péndulo compuesto o físico es cualquier cuerpo rígido que puede oscilar libremente alrededor de un eje horizontal, que no pasa por su centro de masa. En consecuencia, la posición de este cuerpo está determinada, en cualquier instante de tiempo, por el ángulo θ que dicho cuerpo forma con la vertical, tal como se indica en la figura adjunta. Así, debemos notar que cuando este cuerpo está desviado de su posición de equilibrio, tal como se ve en la figura, actúa sobre el mismo un par de fuerzas (la normal y el peso), cuyo momento tiene una magnitud dada por: M z = − mgl sen θ donde el signo negativo debe entenderse como que este momento es opuesto a la rotación, es decir, es un momento recuperador. Si el momento de inercia del cuerpo respecto del eje de suspensión ZZ’ es designado por “I”, al aplicar el teorema del momento angular tenemos que: M z = I&θ& = − mgl sen θ ⇒ &θ& + mgl sen θ = 0 I Considerando sólo pequeñas oscilaciones, es posible poner que sen θ ≅ θ , entonces tenemos: &θ& + mgl θ = 0 I notando que esta ecuación corresponde a un movimiento armónico simple cuyo periodo es: T = 2π I mgl (1) A la vista de la ecuación (1) es fácil observar que un péndulo simple cuya longitud de hilo λ fuera: λ= I ml tendría el mismo periodo que este péndulo físico. En lo concerniente al periodo de las oscilaciones de un péndulo físico, la masa del mismo puede suponerse concentrada en un punto 0’, cuya distancia al eje de suspensión es λ. Tal punto recibe el nombre de centro de suspensión. Además debemos notar que en la expresión (1) puede aplicarse el teorema de Steiner para sustituir el valor del momento de inercia I, en función del momento de inercia IG con respecto a un eje paralelo al eje ZZ’, que pase por el centro de masa del cuerpo (punto G), teniendo entonces: I = I G + ml 2 = mK 2 + ml 2 ⇒ T = 2π K 2 + l2 gl (2) donde K es el radio de giro del cuerpo rígido respecto del eje que pasa por el centro de masa. En la figura adjunta se ha representado la expresión (2), es decir, el periodo como función de la distancia entre el punto de suspensión 0 y el centro de masas G. Vemos que tal función presenta un valor mínimo en l = K . MÉTODO 1.- Como péndulo compuesto se utilizará una barra homogénea provista de una abrazadera deslizante, tal como se indica en la figura. La abrazadera deslizante permite el apoyo adecuado de la barra, para que la misma pueda oscilar libremente. Antes de colocar la abrazadera se procederá a calcular la posición del centro de gravedad, anotando este valor con su error. 2.- Colóquese la abrazadera en un extremo de la barra, determinando la distancia del punto de suspensión al centro de gravedad (longitud l con su error). 3.- Hágase oscilar la barra con una pequeña amplitud y determínese el periodo midiendo el tiempo de 20 oscilaciones. Anótese este resultado con su error. 2 4.- Cambiando la abrazadera de lugar, repítase el procedimiento anterior al menos 9 veces. La abrazadera debe situarse cada vez más próxima al centro de gravedad, pero sin alcanzarlo. Como consecuencia, tendremos una tabla de valores de la distancia y su periodo asociado. 5.- Elevamos al cuadrado el periodo y lo multiplicamos por la longitud, representándolo frente a la longitud al cuadrado. Poniendo los valores de l 2 en las abscisas y los valores de lT 2 en las ordenadas. Debemos también representar los rectángulos de error correspondientes. 5.- Cuando obtenemos la recta de ajuste por mínimos cuadrados con los valores anteriores, vemos que la pendiente de dicha recta y su ordenada en el origen, coinciden con: a= 4π 2 g ,, b= 4π 2 2 K g teniendo en cuenta la expresión (2). En consecuencia, hallamos el valor de g con su error y el valor del radio de giro con su error, representando también la recta de ajuste en la gráfica anterior. 3