Control digital
Anuncio

Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Contents
1 Introducción
5
2 Transformada Z
7
2.1
Propiedades de la transformada Z . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2
La transformada Z inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3
2.2.1
Método de la división directa . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.2
Método de expansión en fracciones parciales . . . . . . . . . . . . . . . . . 15
Ecuaciones en diferencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3 Análisis de sistemas de control en tiempo discreto
3.1
21
Muestreo mediante impulsos y retención de datos . . . . . . . . . . . . . . . . . . 21
3.1.1
La función de transferencia pulso. . . . . . . . . . . . . . . . . . . . . . . 22
3.1.2
Función de transferencia pulso de sistemas en lazo cerrado . . . . . . . . . 25
4 Lugar de las raíces
4.0.3
28
Reglas generales para la construcción de los lugares geométrico de la raíz. 28
5 Diseño de controladores
5.1
9
32
Análisis en el dominio continuo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.1.1
Controlador PI (Proporcional-Integral) . . . . . . . . . . . . . . . . . . . . 33
5.2
Análisis en el dominio discreto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.3
Equivalente discreto de un controlador continuo . . . . . . . . . . . . . . . . . . . 38
5.4
Controladores PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2
5.4.1
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Sintonización de controladores PID utilizando los métodos de Ziegler-
Nichols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6 Modelo en variables de estado
44
7 Sistemas electroneumáticos
45
7.1
Método paso a paso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
A 1er regla de Ziegler-Nichols
51
3
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
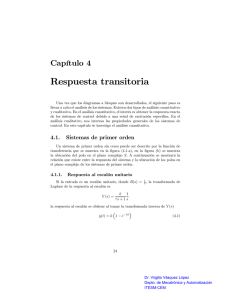
Chapter 1
Introducción
Este curso trata del uso de computadoras digitales para el control de procesos. Primero trataremos el análisis de sistemas en lazo abierto para establecer los fundamentos teóricos necesarios
para el diseño de sistemas de control por computadora. El uso de las computadoras digitales
como elementos de control han crecido rápidamente en los pasados 30 años. Las principales
razones de este uso extensivo radican en su alto rendimiento, versatilidad y confiabilidad. Más
aun, gracias a las computadoras, se han podido implementar nuevas aplicaciones que requieren
de cálculos muy complicados, imposibles de realizar por otros medios. Ejemplo de estas aplicaciones se pueden encontrar en robótica, análisis de señales, optimización de procesos y en el
área del control adaptable.
El tipo de señales sobre las cuales esta basado el curso de control continuo es señales continuas, esto significa que ellas están definidas sobre un rango continuo de tiempo y pueden
cambiar de valor en cualquier momento. Las señales discretas, por otro lado, están definidas
únicamente en ciertos instantes de tiempo, y pueden cambiar de valor únicamente en esos instantes de tiempo. Muy frecuentemente las señales discretas son el resultado de un proceso
de muestreo de señales continuas. Los instantes de muestreo están, generalmente, igualmente
espaciados por un tiempo denominado periodo de muestreo T . Cuando una señal continua es
muestreada, los valores muestreados resultantes forman una señal en tiempo discreto, o simplemente una señal discreta. Gráficamente este fenómeno se representa en la figura 1.
5
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Para que una señal pueda ser administrada en una computadora, esta tiene que ser digitalizada
previamente. Para efectuar esta operación se hace uso de los dispositivos electrónicos llamados convertidores AD (Análogo→Digital). También existen dispositivos que convierten señales
digitales a continuas conocidos como convertidores DA ( Digital→Analógica). Dado que estos
dispositivos requieren de un tiempo de conversión, la acción de mandar una señal a una computadora se efectúa con un dispositivo de muestreo y retención junto con un convertidor AD,
(véase la figura 2). Como lo indica la Figura 2, la conversión de la señal consiste en convertir
los valores muestreados x(i) a números binarios, los cuales ya pueden ser suministrados a la
computadora.
6
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Chapter 2
Transformada Z
La transformada Z es una herramienta clásica para el análisis y síntesis de sistemas discretos.
El papel de la transformada Z en sistemas en tiempo discreto, es similar al de la transformada
de Laplace en sistemas en tiempo continuo y se obtiene aplicando al transformada de Laplace
en señales discretas. Las señales en tiempo discreto surgen si el sistema involucra la operación
de muestreo de señales en tiempo continuo, por lo que la trasnformada Z está relacionada
inherentemente a un proceso de muestreo.
La transformada Z (transformada Z unilateral)de una señal arbitraria es:
X(Z) = z {x(kT )} = z {x(t)} =
∞
X
x(kT )z −k
(2.1)
k=0
= x(0) + x(T )z −1 + x(2T )z −2 + x(3T )z −3 + ...
Ejemplo 1 Obtenga la transformada Z de la función escalón unitario
1
u(t) =
0
t≥0
t<0
Note que la señal x(kT ) = 1 ∀k ≥ 0, por lo tanto utilizando la definición de tarnsformada Z
(2.1), se tiene que
z {u(t)} =
∞
X
z −k = 1 + z −1 + z −2 + z −3 + ....
k=0
7
(2.2)
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Por otro lado, utilizando un resultado de series
1 + a−1 + a−2 + a−3 + ... =
1
1 − a−1
(2.3)
La expresión (2.2) se puede reescribir como
z {u(t)} =
∞
X
z −k = 1 + z −1 + z −2 + z −3 + .... =
k=0
1
1 − z −1
Ejemplo 2 Obtenga la transformada Z de la función exponencial
e−at
x(t) =
0
t≥0
t<0
De la definición de transformada Z
z {x(t)} =
∞
X
k=0
¡
¢−1 ¡ aT ¢−2 ¡ aT ¢−3
e−akT z −k = 1 + eaT z
+ e z
+ e z
+ ....
Utilizando nuevamente el resultado (2.3), se tiene que
z {x(t)} =
1
1 − (eaT z)−1
=
z
z − e−aT
Ejemplo 3 Obtenga la transformada Z de la siguiente expresión
X(s) =
1
s (s + a)
aplicando fracciones parciales
X(s) =
donde
c2
c1
+
s
s+a
¯
¯
¯
¯
1
1
1
−1
¯
¯
= , c1 = (s + a)
=
c1 = s
¯
¯
s (s + a) s=0 a
s (s + a) s=−a
a
8
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
por lo tanto
x(t) =
1
a
x(kT ) =
− a1 e−at
1
a
− a1 e−akT
z
X(Z) = a1 z−1
−
2.1
z
1
a z−e−aT
Propiedades de la transformada Z
El uso de la transformada Z se puede facilitar sustancialmente al utilizar algunas de las
propiedades de la transformada Z, las cuales se pueden obtener directamente de la definición.
En las siguientes propiedades listadas a continuación, se asume que
Fi (z) = z {fi (t)} = z {fi (kT )}
Propiedad de la linealidad
Una función f (x) es lineal si f (αx1 + βx2 ) = αf (x1 ) + βf (x2 ). Aplicando este resultado a la
definición de la transformada Z, se obtiene inmediatamente que
∞
X
Z {αf1 (kT ) + βf2 (kT )} =
[αf1 (kT ) + βf2 (kT )] z −k
k=0
= αZ {f1 (kT )} + βZ {f2 (kT )}
= αF1 (z) + βF2 (z)
Entonces, la transformada Z es una función lineal. La propiedad de la linealidad hace posible
que se pueda aplicar la técnica de fracciones parciales.
Teorema de la traslación real
Z {f (t − nT )} = z −n F (z)
y
Z {f (t + nT )} = z
n
"
F (z) −
9
n−1
X
k=0
f (kT )z
(2.4)
−k
#
(2.5)
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
A partir de esta última expresión se tiene que
Z {f (t + T )} = z [F (z) − f (0)] = zF (z) − zf (0)
£
¤
Z {f (t + 2T )} = z 2 F (z) − f (0) − f (T )z −1 = z 2 F (z) − z 2 f (0) − zf (T )
£
¤
Z {f (t + 3T )} = z 3 F (z) − f (0) − f (T )z −1 − f (2T )z −2 = z 3 F (z) − z 3 f (0) − z 2 f (T ) − zf (2T )
Esta propiedad es una herramienta indispensable en la solución de ecuaciones en diferencias.
De las propiedades anteriores note que la multiplicación de F (z) por z tiene el efecto de avanzar
la señal f (kT ) un período de muestreo y que la multiplicación de F (z) por z −1 tiene el efecto
de retrasar la señal f (kT ) un período de muestreo.
Ejemplo 4 Determine la transformada Z de la siguiente función
Figure 2-1: Escalon desplazado en el tiempo
Solución 5 La función que describe la gráfica anterior es
f (t) = u(t − T )
Aplicando la propiedad de la traslación real (2.4)
Z {u(t − T )} = z −1
z
1
=
z−1
z−1
Ejemplo 6 Determine la transformada Z de la siguiente función
Ejemplo 7 Determine la transformada Z de la siguiente función
10
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Figure 2-2:
Figure 2-3:
Teorema de la tralación compleja
Si F (z) es la transformada Z de f (t), entonces,
©
ª
Z e−at f (t) = F (zeaT )
la transformada. Esto se conoce como el teorema de la traslación compleja
Ejemplo 8 Determine la transforma Z de g(t) = te−t
Solución 9 Note que f (t) = t, a partir de tablas, se tiene que
F (z) =
por lo que
¢−1
¡
T zeT
T z −1
(1 − z −1 )2
¢
¡
T z −1 e−T
T ze−T
G(z) = ³
=
´2 =
(1 − z −1 e−T )2
(z 2 − e−T )2
1 − (zeT )−1
11
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Teorema del valor inicial
Si X(z) = z {x(t)} = z {x(k)} y si el lim X(z) existe, entonce el valor inicial x(0) de x(t) o de
z→∞
x(k) está dado por
x(0) = lim X(z)
(2.6)
z→∞
Para probar este teorema, note que
X(z) =
∞
X
x(k)z −k = x(0) + x(1)z −1 + x(2)z −2 + ....
k=0
al tomar el límite cuando z tiende a infinito
lim X(z) = x(0) +
z→∞
x(1) x(2)
+ 2 + .... = x(0)
z
z
Ejemplo 10 Determine el valor inicial x(0) si X(z) está dada por
X(z) =
1 − z −1 + T z −1
(1 − z −1 )2
Solución 11
1 − z1 + T z1
¡
¢2 = 1
z→∞
1 − z1
lim X(z) = lim
z→∞
X(z) es la transformada z de x(t) = 1 + t, por lo que x(0) = 1
Teorema del valor final
Si X(z) = z {x(k)}, donde x(k) = 0 para k < 0 y que X(z) es estable, es decir, x(k) permanesca
finita (k = 0, 1, 2, ...). Entonces el valor final de x(k) puede darse mediante
lim x(k) = lim
k→∞
z→1
£¡
¢
¤
1 − z −1 X(z)
Ejemplo 12 Determine el valor final x(∞) de
X(z) =
1
1
−
,
−1
−aT
1−z
1−e
z −1
12
a>0
(2.7)
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
mediante el uso del teorema del valor final
Solución 13
x(∞) = lim
z→1
·
¡
¢
1 − z −1
¸
−e−aT z −1 + z −1
=1
(1 − z −1 ) (1 − e−aT z −1 )
Note que X(z) es la transformada z de x(t) = 1 − e−at , por lo tanto x(∞) = 1
2.2
La transformada Z inversa
Como ya se menciono al inicio de este capítulo, la transformada Z en sistemas de control en
tiempo discreto juega el mismo papel que la transformada de Laplace en sistemas de control
continuo, por lo que es necesario, al igual que en Laplace, obtener la transformada Z inversa
para que esta transformada sea útil.
La notación para la transformada Z inversa es Z −1 . La transformada Z −1 de X(z) da como
resultado la correspondiente secuencia en el tiempo x(k). Note que a partir de la transformada Z −1 sólo se obtiene la secuencia de tiempo en los instantes de muestreo, por lo que la
transformada Z −1 de X(z) da una única x(k) pero no da una única x(t), es decir, se obtiene
una secuencia de tiempo que especifica los valores de x(t) solamente en los valores discretos de
tiempo, t = 0, T, 2T, ..., y no dice nada acerca de los valores de x(t) en todos los otros tiempos.
Esto es, muchas funciones del tiempo x(t) diferentes pueden tener la misma x(kT ).
Existen diversos métodos para obtener la transformada Z −1 que no implican el uso de tablas:
1. Método de la división directa
2. Método de expansión en fracciones parciales
3. Método de la integral de inversión
4. Método computacional
Polos y ceros en el plano Z
La ubicación de los polos y ceros de X(z) determina las características de x(k), la secuencia de
valores o números. Para encontrar los polos y los ceros de X(z), es conveniente expresar X(z)
13
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
como un cociente de polinomios en z. Por ejemplo, ¿cuántos polos y ceros tiene la siguiente
función X(z)
¢
¡
1 + z −1 z −2
X(z) =
(1 + 0.2z −1 ) (1 + 0.5z −1 )
al reescribirla en potencias positivas
¡
¢
1 + z1 z12
¢¡
X(z) = ¡
1 + 0.2
1+
z
¢
0.5 =
z
z+1 1
z z2
z+0.2 z+0.5
z
z
=
z+1
z(z + 0.2)(z + 0.5)
por lo que X(z) tiene polos ubicados en z = 0, z = −0.2 y z = −0.5 y tiene un cero, ubicado
en z = −1.
2.2.1
Método de la división directa
En el método de la división directa, la transformada z inversa se obtiene mediante la expansión
de X(z) en una serie infinita de potencias de z −1 . Este método es útil cuando es díficil obtener
una expresión en forma cerrada o se desea encontrar sólo algunos de los primeros términos de
la secuencia x(k).
El método de la división directa proviene del hecho de que si X(z) está expandida en una
serie de potencias de z −1 , esto es, si
X(z) =
∞
X
x(kT )z −k
k=0
= x(0) + x(T )z −1 + x(2T )z −2 + x(3T )z −3 + ....
entonces, x(kT ) es el coeficiente del término z −k . Por lo tanto, los valores de x(kT ) para
k = 0, 1, 2, ... ,se pueden determinar por inspección.
Ejemplo 14 Encuentre x(k) para k = 0, 1, 2, 3, 4 cuando X(z) está dada por
X(z) =
z+1
(z + 0.2)(z + 0.5)
Solución 15 Primero, X(z) se reescribe como un cociente de polinomios en z −1
X(z) =
1 + z −1
(1 + 0.2z −1 ) (1 + 0.5z −1 )
14
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
y realizando una división algebraica
z −1 + z −2
= z −1 + 0.3z −2 − 0.31z −3 + 0.187z −4 + ...
1 + 0.7z −1 + 0.1z −2
por inspección se obtiene la solución para x(k), con k = 0, 1, 2, 3, 4, es decir,
x(0) = 0
x(1) = 1
x(2) = 0.3
x(3) = −031
x(4) = 0.187
..
.
Ejemplo 16 Encuentre x(k) para k = 0, 1, 2, 3, 4 cuando X(z) está dada por
X(z) =
2.2.2
1
z−1
Método de expansión en fracciones parciales
El método de expansión en fraciones parciales que se presenta aquí es idéntico al método de
expansión en fracciones parciales que se utiliza en la Transformada de Laplace. Para encontrar
la transformada Z inversa de X(z) por fracciones parciales, primero se factoriza el polinomio
denominador de X(z) y se encuentran los polos
X(z) =
b0 z m + b1 z m−1 + ... + bm−1 z + bm
N (z)
=
D(z)
(z + p1 )(z + p2 )...(z + pn )
luego se expande X(z) en fracciones parciales de manera que cada uno de lo términos sea
identificado facílmente utilizando las tablas de transformada Z. Si X(z) tiene uno o más ceros
en el origen (z = 0), entonces
X(z)
z
se debe expandir en lugar de X(z).
15
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Polos diferentes
Considérese que todos los polos son diferentes y que hay por lo menos un cero en el origen,
entonces se aplicará fracciones parciales a
X(z)
z
y se expandirá de la forma
X(z)
a1
a2
an
=
+
+ ... +
z
z + p1 z + p2
z + pn
donde las ai son constantes y se denominan residuos de la raíz z = −pi . La fórmula para obtener
el residuo es
·
¸
X(z)
ai = (z + pi )
z
z=−pi
Ejemplo 17 Determine la transformada Z inversa de
X(z) =
z
(z − 1) (z − 0.1)
Solución 18 (a) Note que existe un cero en el origen, por lo que se expande en fracciones
parciales
X(z)
z ,
es decir
X(z)
1
a
b
=
=
+
z
(z − 1) (z − 0.1)
z − 1 z − 0.1
donde
a =
b =
por lo tanto
X(z) = 1.1
¯
¯
1
(z − 1)¯¯
= 1.1
(z − 1) (z − 0.1)
z=1
¯
¯
1
(z − 0.1)¯¯
= −1.1
(z − 1) (z − 0.1)
z=0.1
z
1
1
z
− 1.1
= 1.1
− 1.1
z−1
z − 0.1
1 − z −1
1 − 0.1z −1
x(k) = 1.1 (1)k − 1.1 (0.1)k
¿Qué sucedería si no se "guarda" el cero en el origen?
Solución 19 (b)
X(z) =
z
a
b
=
+
(z − 1) (z − 0.1)
z − 1 z − 0.1
16
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
donde
a =
b =
¯
¯
z
= 1.1
(z − 1)¯¯
(z − 1) (z − 0.1)
z=1
¯
¯
z
(z − 0.1)¯¯
= −0.11
(z − 1) (z − 0.1)
z=0.1
sustituyendo los valores de los residuos
X(z) = 1.1
1
1
z −1
z −1
− 0.11
= 1.1
−
0.11
z−1
z − 0.1
1 − z −1
1 − 0.1z −1
por lo tanto
x(k) = 1.1 (1)k−1 − 0.11 (0.1)k−1
Note que al parecer las dos soluciones son distintas, ¿será cierto?, ¿Por qué la diferencia
entre las dos soluciones? Verique si en realidad son diferentes.
Ejemplo 20 Determine la transforma z inversa de
1
− 1)
X(z) =
z 2 (z
Reeescribiendo en potencias negativas
X(z) =
Note que sí F (z) =
1
,
1−z −1
z −3
1 − z −1
entonces f (k) = u(k) = (1)k . Utilizando el teorema de la traslación
real
Z {x(t − nT )} = z −n X(z)
se tiene que
½
©
ª
Z −1 z −3 F (z) = Z −1 z −3
1
1 − z −1
17
¾
= u(k − 3) = (1)k−3
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Polos múltiples
Sea X(z) escrita en forma factorizada
N (z)
N (z)
=
r
D(z)
(z + p1 ) (z + pr+1 ) + ... + (z + pn )
X(z) =
es decir, existen r raíces múltiples y n − r raíces diferentes. la expansión de X(z) en fracciones
parciales es
X(z) =
br
br−1
b1
ar+1
an
+
+ ... +
+
+
r
r−1
(z + p1 )
(z + p1 )
z + p1 z + pr+1 z + pn
donde br , br−1 , b1 están dados por
h
i
(z)
br = (z + p1 )r N
D(z) z=−p
io 1
n h
(z)
d
(z + p1 )r N
br−1 = dz
D(z)
z=−p1
..
.
io
n j h
d
r N (z)
br−j = j!1 dz
(z
+
p
)
1 D(z)
j
z=−p1
Ejemplo 21 Determine la transformada Z inversa de
X(z) =
z
2
(z − 1) (z − 2)
b1
1
b2
X(z)
a
=
+
+
=
2
2
z
z − 2 (z − 1)
z−1
(z − 1) (z − 2)
donde
a=
1
(z−1)2 (z−2)
¯
¯
(z − 2)¯
b2 =
1
(z−1)2 (z−2)
b1 =
1
d
dz (z−1)2 (z−2)
Por lo tanto
X(z) =
z=2
¯
2¯
(z − 1) ¯
=1
z=1
¯
2¯
(z − 1) ¯
= −1
z=1
=
¯
1 ¯
d
dz (z−2) ¯z=1
¯
1 ¯
= − (z−2)
2¯
z=1
= −1
z
z
1
z −1
1
z
−
−
=
−
−
2
2
−1
z − 2 (z − 1)
z−1
1 − 2z
1 − z −1
(1 − z −1 )
18
x(k) = (2)k − k (1)k−1 − (1)k
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Polos complejos y conjugados
Esta metodología es ilustrada por medio de una serie de ejemplos.
Ejemplo 22 Determine la transformada z inversa de
X(z) =
z2
z2 − z + 1
Note que las raíces son complejas y conjugadas. Reescribiendo la expresión anterior en potencias
negativas
X(z) =
1
1 − z −1 + z −2
y utilizando la tabla de transformada z, se identifica que
2 cos(ωT ) = 1 → cos(ωT ) =
1
→ ωT = cos−1 (ωT )
2
Por lo tanto
X(z) =
=
1 − 12 z −1 + 12 z −1
1 − z −1 + z −2
1 − 12 z −1
1
sin (ωT ) z −1
+
1 − z −1 + z −2 2 sin (ωT ) 1 − z −1 + z −2
x(k) = cos(ωkT ) +
1
sin (ωkT )
2 sin (ωT )
Ejemplo 23 Determine la transformada z inversa de
X(z) =
z2
2z 2 − z + 1
19
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
X(s)
x(t)
x(kT ) o x(k)
X(z)
ω
s2 +ω 2
s
s2 +ω 2
ω
(s+α)2 +ω2
s+α
(s+α)2 +ω2
sin (ωt)
sin (ωkT )
cos (ωt)
cos (ωkT )
e−αt sin (ωt)
e−αkT sin (ωkT )
z −1 sin ωT
1−2z −1 cos ωT +z −2
1−z −1 cos ωT
1−2z −1 cos ωT +z −2
e−αT z −1 sin ωT
1−2e−αT z −1 cos ωT +e−2αT z −2
e−αt cos (ωt)
e−αkT cos (ωkT )
1−e−αT z −1 cos ωT
1−2e−αT z −1 cos ωT +e−2αT z −2
Tabla de Transformada Z
Ejercicio 24 Determine la transformada z inversa de las siguientes funciones
¡
¢
1 − e−aT z
X(z) =
(z − 1) (z − e−aT )
X(z) =
X(z) =
2.3
¡
¢
1 − e−aT z
(z − 1)2 (z − e−aT )
z2 + z + 2
(z − 1) (z 2 − z + 1)
Ecuaciones en diferencias
Un sistema en tiempo discreto, lineal e invariante en el tiempo es caracterizado por la ecuación
x(k) + a1 x(k − 1) + ... + an x(k − n) = b0 u(k) + b1 u(k − 1) + ... + bm u(k − m)
donde u(k) y x(k) son la entrada y la salida del sistema respectivamente, en la k-ésima
iteración. El problema es obtener una expresión para x(k). Definase
X(z) = z {x(kT )} = z {x(k)}
entonces, aplicando el teorema de la translación real se obtienen la Transformada Z de cada
uno de los términos que conforman la ecuación en diferencias. Posteriomente, se despeja la
variable dependiente X(z) y se aplica la transformada Z −1 para obtener la secuencia x(k)
Ejemplo 25 [1] Obtenga la solución de la siguiente ecuación en diferencias en términos de
20
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
x(0) y x(1)
x(k + 2) + (a + b) x(k + 1) + abx(k) = 0
donde a y b son constantes y k = 0, 1, 2, ...
Ejemplo 26 [1]Resuelva la siguiente ecuación en diferencias
2x(k) − 2x(k − 1) + x(k − 2) = u(k)
donde x(k) = 0 para k < 0 y
1, k = 0, 1, 2, ...
u(k) =
0, k < 0
21
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Chapter 3
Análisis de sistemas de control en
tiempo discreto
3.1
Muestreo mediante impulsos y retención de datos
Considérese un muestreador ficticio cuya salida se considera como un tren de impulsos que
comienza en t = 0, con el período de muestreo igual a T y la magnitud de cada impulso igual al
valor muestreado de la señal en tiempo continuo en el instante de muestreo correspondiente (ver
figura 3-1). La señal muestreada x∗ (t), se puede representar mediante una sumatoria infinita1
∗
x (t) =
∞
X
k=0
x(kT )δ(t − kT )
= x(0)δ(t) + x(T )δ(t − T ) + ... + x(kT )δ(t − kT ) + ...
1
(3.1)
A lo largo de estas notas, se supone que la operación de muestreo es uniforme; esto es, sólo existe un período
de muestreo en el sistema el cual es constante. Si un sistema de control en tiempo discreto incluye dos o más
muestreadores en el sistema, se supone que los muestreadores están sincronizados y tienen la misma frecuencia
de muestreo.
22
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
La transformada de Laplace de la ecuación (3.1)
X ∗ (s) = L [x∗ (t)] = x(0)L [δ(t)] + x(T )L [δ(t − T )] + x(2T )L [δ(t − 2T )] + ...
= x(0) + x(T )e−T s + x(2T )e−2T s + ...
∞
X
x(kT )e−kT s
=
k=0
Figure 3-1: Muestreador mediante impulsos
Si se define
z = eT s
o
1
ln z
T
s=
entonces
X ∗ (s)|s= 1
T
ln z
= X(z)
(3.2)
La transformada de Laplace de la señal muestreada mediante impulsos x∗ (t) es la transformada
Z de la señal x(t) si eT s se define como z, es decir z = eT s .
3.1.1
Retenedor de orden cero
En un muestreador ideal, un interruptor se cierra cada período de muestreo T para admitir una
señal de entrada. Un muestreador convierte una señal de tiempo continuo en un tren de pulsos
que se presenta en los instantes de muestreo t = 0, T, 2T, ...
23
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
La retención de datos es un proceso de generación de una señal de tiempo continuo h(t) a
partir de una secuencia en tiempo discreto x(kT ). Un circuito de retención convierte la señal
muestreada en una señal de tiempo continuo, que reproduce aproximadamente la señal aplicada
al muestreador. El circuito de retención más simple es el Retenedor de Orden Cero (ROC), este
Figure 3-2:
circuito retiene la amplitud de la muestra en un instante de muestreo al siguiente. La función
de transferencia del ROC, GROC (s) es
GROC (s) =
3.1.2
1 − e−T s
s
(3.3)
La función de transferencia pulso.
La función de transferencia relaciona las transformada de Laplace de la señal de salida con la
correspondiente entrada del sistema, mientras que la función de transferencia pulso relaciona
las transformadas Z de salida en los instantes de muestreo con la correspondiente entrada
muestreada.
Considere la respuesta de un sistema continuo excitado por una señal muestreada como se
muestra en la figura 3-3. La señal muestreada mediante impulsos x∗ (t) es la entrada al sistema
cuya función de transferencia es G(s). Se supone que la salida del sistema es una señal en
24
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Figure 3-3: Sistema en tiempo continuo G(s) excitado con una señal muestreada mediante
impulsos
tiempo continuo y(t)1 . Entonces la salida Y (s) es
Y (s) = G(s)X ∗ (s)
Considere que en la salida hay otro muestreador, sincronizado en fase con el muestreador de la
entrada, y ambos operan con el mismo período de muestreo, entonces la salida es
Y ∗ (s) = [G(s)X ∗ (s)]∗ = G∗ (s)X ∗ (s)
De este modo, utilizando la relación (3.2) se obtiene
Y (z) = G(z)X(z)
Ejemplo 27 Considere los sistemas que se muestran en la figura 3-4. Donde G1 (s) =
G2 (s) =
1
s+1 .
Obtenga la función de transferencia pulso
Y (z)
X(z)
1
s,
para cada uno de estos sistemas
Cálculo de la transformada Zque involucran un retenedor de orden cero (ROC)
Suponga que la función de transferencia G(s) sigue de un ROC. Entonces el producto de la
función de transferencia del ROC y de G(s) se convierte en
X(s) =
1
1 − e−T s
G(s)
s
Se supone que x(t) < 0 e y(t) < 0 para t < 0.
25
(3.4)
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Figure 3-4: Sistemas muestreados
Note que (3.4) se puede escribir como
¡
¢ G(s) ¡
¢
X(s) = 1 − e−T s
= 1 − e−T s G1 (s) = G1 (s) − e−T s G1 (s)
s
(3.5)
la transformada Z de (3.5) es dada por
¢
¡
X(z) = G1 (z) − z −1 G1 (z) = 1 − z −1 G1 (z)
Por lo tanto, para obtener la transformada Z de X(s), el término 1 − e−T s = 1 − z −1 y
o
n
G(s)
únicamente hay que obtener la transformada Z
s
Ejemplo 28 Obtenga la transformada Z de
G(s) =
1 − e−T s 1
s
s
Solución 29
¡
¢
G(z) = 1 − z −1 Z
½
1
s2
¾
¢
¡
= 1 − z −1
26
T z −1
T z −1
T
=
=
2
−1
−1
1−z
z−1
(1 − z )
3.1.3
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Función de transferencia pulso de sistemas en lazo cerrado
Para determinar la función de transferencia pulso del sistema de control en lazo cerrado que se
muestra en la figura (3-5), considere el siguiente algoritmo:
Figure 3-5: Sistema de control en lazo cerrado
Figure 3-6: Grafo del sistema en lazo cerrado
1. Denomine la entrada de los muestreadores como E(s) y la salida de los muestreadores
como E ∗ (s)
2. Trace el grafo del sistema (véase la figura 3-6)
3. Escriba las salidas del grafo en función de las entradas del grafo (se considera que las
entradas del grafo son las entradas del sistema y las salidas de los muestreadores y que
las salidas del grafo son las salidas del sistema y las entradas al muestreador). En este
caso, las ecuaciones quedan de la siguiente forma
Y ∗ (s) = G1 (s)G2 (s)E ∗ (s)
E(s) = R(s) − G1 (s)G2 (s)E ∗ (s)
27
(3.6)
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
4. Muestree las ecuaciones obtenidas en el paso anterior
∗
Y ∗ (s) = G1 G2 (s)E ∗ (s)
∗
E ∗ (s) = R∗ (s) − G1 G2 (s)E ∗ (s)
(3.7)
5. Resuelva las ecuaciones por el método más conveniente:
(a) Masson
Figure 3-7: Grafo de lazo cerrado muestreado
∗
G1 G2 (s)
Y ∗ (s)
=
∗
∗
R (s)
1 + G1 G2 (s)
G1 G2 (z)
Y (z)
=
R(z)
1 + G1 G2 (z)
(b) Sustitución
∗
E ∗ (s) = R∗ (s) − G1 G2 (s)E ∗ (s)
E ∗ (s) =
Y ∗ (s) =
R∗ (s)
∗
1+G1 G2 (s)
∗
G1 G2 (s)E ∗ (s)
=
∗
G1 G2 (s)
R∗ (s)
∗
1+G1 G2 (s)
por lo tanto
G1 G2 (z)
Y (z)
=
R(z)
1 + G1 G2 (z)
Ejercicio 30 Obtenga la función de transferencia pulso de lazo cerrado del siguiente diagrama
a bloques
28
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Figure 3-8: Diagrama a bloques discreto
29
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Chapter 4
Diseño de controladores digitales
4.1
Correspondencia entre el plano s y el plano z
En el plano complejo s, la ubicación de los polos y los ceros nos permitian predecir el comportamiento dinámico el sistema, de aquí la importancia de estudiar la relación entre los requisitos
de diseño (por ejemplo tiempo de establecimiento ts , máximo sobreimpulso Mp ) con la ubicación de los polos en el plano s. De igual manera, en los sistemas discretos es muy importante
la ubicación de los polos y los ceros en el plano z. A continuación determinaremos la relación
existente entre el plano s y el plano z.
En un proceso donde se encuentre involucrado un muestreo por impulsos, las variables
complejas s y z se encuentran relacionadas por
z = eT s
dado que la variable compleja s está formada por una parte real σ y una parte imaginaria ω,
es decir
s = σ + jω
s se
tiene que
z = eT (σ+jω) = eT σ ejωT
Si se considera un punto representativo en el eje jω en el plano s, y conforme este punto se
30
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Figure 4-1: Plano S−Plano Z
mueve desde −j ω2s hasta j ω2s siendo ω s la frecuencia de muestreo, tenemos que |z| = 1 y ]z
varía de −π a π en dirección contraria a las manecillas del reloj en el plano z. Conforme
el punto representativo se mueve desde j ω2s hasta j 3ω2 s , el punto correspondiente en el plano
z traza un c´riculo unitario en dirección contraria a las menecillas del reloj. Por lo tanto,
conforme el punto se mueve en el eje jω del plano s dibujaremos un círculo unitario en el plano
z un número infinito de veces.
Tiempo de establecimiento ts
El tiempo de establecimiento queda determinado por el valor de atenuación σ de los polos
dominantes en lazo cerrado. Si se especifica el tiempo de establecimiento, se puede dibujar una
línea σ = −σ 1 corresponde en el plano z a la parte interior de un círculo de radio e−σ1 T
31
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Lugar geométrico de frecuencias constantes
Un lugar geométrico de frecuencia constante ω = ω 1 en el plano s corresponde en el plano z a
una línea radial de ángulo constante T ω 1 (en radianes)
Figure 4-2:
Lugar geométrico de amortiguamiento constante
Una línea de factor de amortiguamiento constante (una línea radial) en el plano s cofrresponde
a una espiral en el plano z
q
s = −ξω n + jω n 1 − ξ 2 = −ξω n + jω d
z = eT s = eT (−ξωn +jωd )
Por lo tanto
Ã
y
!
Ã
!
p
2πξω n 1 − ξ 2
2πξω d
p
|z| = exp (−ξω n T ) = exp −
= exp − p
ωs 1 − ξ 2
ωs 1 − ξ 2
]z = ω d T =
2πω d
ωs
Entonces, la magnitud de z se reduce y el ángulo de z se aumenta linealmente conforme ω d se
incremente y el lugar geométrico en el plano z se convierte en una espiral logarítmica
32
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Figure 4-3:
33
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Chapter 4
Diseño de controladores digitales
4.1
Correspondencia entre el plano s y el plano z
En el plano complejo s, la ubicación de los polos y los ceros nos permitian predecir el comportamiento dinámico el sistema, de aquí la importancia de estudiar la relación entre los requisitos
de diseño (por ejemplo tiempo de establecimiento ts , máximo sobreimpulso Mp ) con la ubicación de los polos en el plano s. De igual manera, en los sistemas discretos es muy importante
la ubicación de los polos y los ceros en el plano z. A continuación determinaremos la relación
existente entre el plano s y el plano z.
En un proceso donde se encuentre involucrado un muestreo por impulsos, las variables
complejas s y z se encuentran relacionadas por
z = eT s
dado que la variable compleja s está formada por una parte real σ y una parte imaginaria ω,
es decir
s = σ + jω
s se
tiene que
z = eT (σ+jω) = eT σ ejωT
Si se considera un punto representativo en el eje jω en el plano s, y conforme este punto se
30
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Figure 4-1: Plano S−Plano Z
mueve desde −j ω2s hasta j ω2s siendo ω s la frecuencia de muestreo, tenemos que |z| = 1 y ]z
varía de −π a π en dirección contraria a las manecillas del reloj en el plano z. Conforme
el punto representativo se mueve desde j ω2s hasta j 3ω2 s , el punto correspondiente en el plano
z traza un c´riculo unitario en dirección contraria a las menecillas del reloj. Por lo tanto,
conforme el punto se mueve en el eje jω del plano s dibujaremos un círculo unitario en el plano
z un número infinito de veces.
Tiempo de establecimiento ts
El tiempo de establecimiento queda determinado por el valor de atenuación σ de los polos
dominantes en lazo cerrado. Si se especifica el tiempo de establecimiento, se puede dibujar una
línea σ = −σ 1 corresponde en el plano z a la parte interior de un círculo de radio e−σ1 T
31
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Lugar geométrico de frecuencias constantes
Un lugar geométrico de frecuencia constante ω = ω 1 en el plano s corresponde en el plano z a
una línea radial de ángulo constante T ω 1 (en radianes)
Figure 4-2:
Lugar geométrico de amortiguamiento constante
Una línea de factor de amortiguamiento constante (una línea radial) en el plano s cofrresponde
a una espiral en el plano z
q
s = −ξω n + jω n 1 − ξ 2 = −ξω n + jω d
z = eT s = eT (−ξωn +jωd )
Por lo tanto
Ã
y
!
Ã
!
p
2πξω n 1 − ξ 2
2πξω d
p
|z| = exp (−ξω n T ) = exp −
= exp − p
ωs 1 − ξ 2
ωs 1 − ξ 2
]z = ω d T =
2πω d
ωs
Entonces, la magnitud de z se reduce y el ángulo de z se aumenta linealmente conforme ω d se
incremente y el lugar geométrico en el plano z se convierte en una espiral logarítmica
32
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Figure 4-3:
Ejemplo 31 Determine la región en el plano complejo z de tal forma que se cumplan con las
siguientes condiciones: Tiempo de establecimiento ts < 4s, Tiempo pico tp < 3s y un máximo
sobreimpulso Mp < 10%. Considere que el período de muestreo es T = 0.5seg
4.2
Análisis de estabilidad en el plano z
Considere la siguiente función de transferencia pulso en lazo cerrado
Y (z)
G(z)
=
R(z)
1 + GH(z)
(4.1)
La estabilidad del sistema en lazo cerrado se puede determinar por las ubicaciones de los polos
de lazo cerrado en el plano z, es decir, por las raíces de la ecuación característica
1 + GH(z) = 0
(4.2)
como sigue:
1. Para que el sistema sea estable los polos de lazo cerrado deben estar dentro del círculo
unitario. Cualquier polo en lazo cerrado, fuera del círculo unitario hace inestable al
sistema
2. Si un polo simple se presenta en z = 1, el sistema es criticamente estable. Si existe un par
de polos complejos y conjugados sobre el círculo unitario, también hace que el sistema sea
33
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
críticamente estable
3. Los ceros de lazo cerrado no afectan la estabilidad y por lo tanto pueden quedar localizados
en cualquier parte del plano complejo z.
Ejemplo 32 La función de transferencia de lazo cerrado de un sistema de control digital, es
expresada por
G(z) =
z2
z
−z+2
¿El sistema es estable o inestable?
Solución 33 Las raíces del sistema son
z = 0.5 ± j1.232
Por lo tanto la magnitud de los polos son 1.32, por lo que los polos estan fuera del círculo
unitario, lo cual implica que el sistema es inestable
Ejemplo 34 Considere el siguiente sistema de control
donde
Figure 4-4:
GROC (s) =
1
1 − e−T s
y G(s) =
s
s+1
Si T = 0.5s, determine el rango de k que garantice la estabilidad del sistema en lazo cerrado
Solución 35 Sea
GT
½
1 − e−T s 1
= z
s
s+1
−T
1−e
= k
z − e−T
¾
34
¢
¡
= 1 − z −1 z
½
1
s (s + 1)
¾
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Por lo tanto, la ecuación característisca es
¢
¡
z − e−T + k 1 − e−T = 0
La estbilidad del sistema es verificada al considerar que la magnitud del polo es menor que uno,
es decir
de lo anterior se tiene que
¯
¢¯
¡
|z| = ¯e−T − k 1 − e−T ¯ < 1
¢
¡
e−T − k 1 − e−T < 1 → k > −1
y
¢¢
¡
¡
1 + e−T
− e−T − k 1 − e−T < 1 → k <
1 − e−T
4.2.1
La prueba de estabilidad de Jury
Esta prueba de estabilidad nos indica la existencia de cualquier raíz inestable (raíces en el plano
z fuera del círculo unitario). Sin embargo, no indica nada sobre las ubicaciones de las raíces
inestable. Para aplicar la prueba de estabilidad de Jury a una ecuación característica dada
P (z) = 0, se construye una tabla cuyos elementos se basan en los coeficientes de P (z) = 0.
Suponga que la ecuación característica es de la forma
P (z) = a0 z n + a1 z n−1 + a2 z n−2 + ... + an−1 z + an
35
(4.3)
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
donde a0 > 0. Entonces la tabla de Jury se construye como sigue
Renglón
z0
1
an
2
a0
3
z1
z2
z3
···
an−1 an−2 an−3 · · ·
a1
bn−1 bn−2
a2
a3
bn−3
···
bn−4 · · ·
4
..
.
b0
b1
b2
b3
2n − 5
p3
p2
p1
p0
2n − 4
p0
p1
p2
p3
2n − 3
q2
q1
q0
···
z n−2 z n−1 z n
a2
a1
a0
an−2 an−1 an
b1
b0
bn−2
bn−1
donde
bk
qk
¯
¯
¯ an an−1−k
= ¯¯
¯ a0
ak+1
..
.¯
¯
¯ p3 p2−k
= ¯¯
¯ p0 pk+1
¯
¯
¯
¯,
¯
¯
¯
¯
¯
¯,
¯
¯
k = 0, 1, 2, ..., n − 1
k = 0, 1, 2
Note que el último renglón de la tabla está formado por tres elementos (para sistemas de segundo
orden, 2n − 3 = 2(2) − 3 = 1 la tabla estará formada por un renglón)
Un sistema con la ecuación característica dad por (4.3), el cual por comodidad se reescribe
P (z) = a0 z n + a1 z n−1 + a2 z n−2 + ... + an−1 z + an
donde a0 > 0, es estable, si todas las condiciones siguientes se satisfacen:
1. |an | < a0
2. P (z)|z=1 > 0
> 0 para n par
3. P (z)|z=−1
< 0 para n impar
36
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
|bn−1 | > |b0 |
4.
|cn−2 | > |c0 |
..
.
|q2 | > |q0 |
Ejemplo 36 Examine la estabilidad de la ecuación caracteristica siguiente
P (z) = z 3 − 1.5z 2 − 0.1z + 0.5 = 0
Solución 37 Antes de construir la tabla se verifcan las condiciones 1, 2 y 3. Note que a0 = 0.5
y an = a3 = 1, por lo tanto |0.5| < 1
por lo que la primera condición se cumple.
P (z)|z=1 = (1)3 − 1.5 (1)2 − 0.1 (1) + 0.5 = −0.1 < 0
Esta condición no se satisface por lo que el sistema es inestable
Ejemplo 38 Examine la estabilidad de la ecuación caracteristica siguiente
P (z) = z 4 − z 3 + 0.5z 2 + 0.1z − 0.5 = 0
Solución 39 Nuevamente, antes de construir la tabla se verifcan las condiciones 1, 2 y 3.
Note que a0 = −0.5 y an = a4 = 1, por lo tanto |0.5| < 1
por lo que la primera condición se
cumple.
P (z)|z=1 = (1)4 − (1)3 + 0.5 (1)2 − 0.1 (1) + 0.5 = 0.9 > 0
P (z)|z=−1 = (−1)4 − (−1)3 + 0.5 (−1)2 − 0.1 (−1) + 0.5 = 3.1 > 0
37
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
Ahora construimos la tabla de estabilidad de Jury
Renglón
z0
z1
z2
z3
z4
1
−0.5
0.1
0.5
−1
1
2
1
−1
0.5
0.1
−0.5
3
−0.75
0.95
−0.75
0.4
4
0.4
−0.75
0.95
−0.75
5
0.4
−0.41
0.18
Verificando las condiciones
|bn−1 | > |b0 |
que en este caso es
|−0.75| > |0.4|
la cual se cumple. La siguiente condición es
|q2 | > |q0 |
al sustituir los valores
|0.4| > |0.18|
Por lo tanto, la ecuación característica dad es estable, o lo que es lo mismo, todas las raíces
están dentro del círculo unitario.
Ejemplo 40 Considere un sistema de control en tiempo discreto con retroalimentación unitaria
cuya función de transferencia pulso es
GH(z) =
k (0.5z + 1)
(z − 1) (z − 0.36)
considere que T = 1seg. Determine el rango de valores de la ganancia k para garantizar la
estabilidad
38
Dr. Virgilio Vásquez López
Depto. de Mecatrónica y Automatización
ITESM-CEM
4.2.2
Análisis de estabilidad mediante la transformación bilineal y el criterio
de Routh
La transformación bilineal definida por
w+1
w−1
z=
misma que, al ser resuelta en función de w, resulta en
w=
z+1
z−1
hace corresponder el interior del círculo unitario del plano z con el semiplano izquierdo del
plano w.
Considere la ecuacion característica (4.3), es decir
P (z) = a0 z n + a1 z n−1 + a2 z n−2 + ... + an−1 z + an
y sustituyendo
a0
µ
w+1
w−1
w+1
w−1
en lugar de z
¶n
+ a1
µ
µ
µ
¶
¶
¶
w+1
w+1
n−2 w + 1
n−1
z
+ a2
+ ... + an−1
+ an = 0
w−1
w−1
w−1
Al multiplicar ambos miembros de la ecuación por (w − 1)n se obtiene
Q(w) = b0 wn + b1 wn−1 + b2 wn−2 + ... + bn−1 w + bn = 0
es posible aplicar el criterio de estabilidad de Routh de la misma forma que en los sistemas de
tiempo continuo.
4.3
Lugar de las raíces
El método del lugar de las raíces desarrollados para sistemas en tiempo continuo puede ser
extendido sin modificaciones a sistemas discretos en el tiempo, excepto por la estabilidad, la
cual se modifica, del eje jω en el plano S al círculo unitario en el plano Z.
39