Puente de Wheatstone y puente de hilo
Anuncio

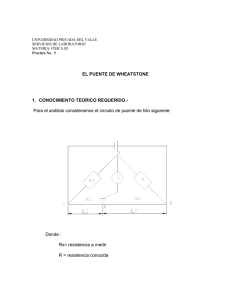
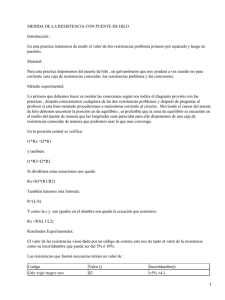
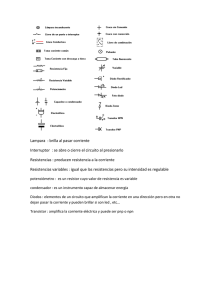
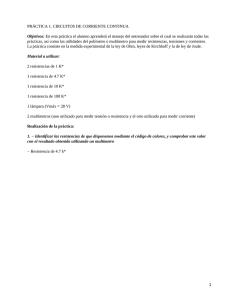
Medidas Electrónicas I Medición de resistencias por métodos de cero UNIDAD TEMATICA 9 CAPITULO I MEDICION DE RESISTENCIAS POR METODOS DE CERO. PUENTE DE WHEATSTONE 1. Introducción: La configuración puente consiste en tres mallas y su análisis general es complicado, incluso en el caso puramente resistivo. Se estudiará la influencia de la sensibilidad del galvanómetro y de la limitación de la intensidad de corriente en los brazos del puente, así como la dependencia de la exactitud del puente con respecto al valor de la incógnita a medir. Se verá el efecto de intercambiar los circuitos de la fuente de alimentación y del galvanómetro. Si se disponen cuatro resistencias R1, R2, R3 y RX; una fuente de corriente continua V y resistencia interna RV y un galvanómetro de resistencia RG en la forma indicada en la figura Nº 1, se tiene el dispositivo llamado puente de Wheatstone para corriente continua. B R1 RX G RG L1 R2 R3 A L2 RV Se puede escribir que: VAB = VA - VB = 0 ⇒ I G = 0 (1) por lo cual se puede decir que el puente está en equilibrio. Observando la figura: V . R3 V . RX VA = y VB = R2 + R3 R1 + R X en equilibrio VA = VB, por lo tanto: V . R3 V . RX = R2 + R3 R1 + R X ⇒ R 1 . R 3 = R 2 . R X (2) V Fig. Nº 1 La expresión (2) se denomina ecuación de equilibrio del puente y permite calcular una de las resistencias en función de las otras tres. R1 RX = . R 3 (3) R2 La condición de equilibrio puede alcanzarse variando independientemente cada una de las otras tres resistencias; pero resulta más cómodo operar de una de las siguientes maneras: a) Manteniendo constante R1 y variando la relación R3/R2, como sucede en el puente de hilo. b) Manteniendo constante la relación R1/R2 y variando R3 como sucede en el puente de caja de décadas. 1.1. Puente de hilo: una resistencia de hilo deslizante se puede incorporar a un puente de Wheatstone como muestra la figura Nº 2. El hilo de resistencia RH = R2 + R3 se puede disponer en un tambor circular, como se ve en la figura Nº 2, o en forma rectilínea como se vio cuando se estudió el potenciómetro. La ecuación de equilibrio para este puente se obtiene igualando los productos de resistencias en ramas opuestas como lo indica la expresión (2). R 1 . ( R 3' + R 3 ) = R X . ( R 2' + R 2 ) (4) R1 RX G RG R’2 L2 R’3 L1 R3 R2 Las resistencias fijas R '2 y R '3 , llamadas extensiones, pueden usarse para controlar el rango total efectivo de la resistencia de hilo. Si R '2 = 0 = R '3 , la resistencia incógnita del puente de hilo es, según la expresión (4): R3 R3 RX = . R1 = . R 1 (5) R2 RH - R3 Fig. Nº 2 RV V I-1 Medidas Electrónicas I El cociente Medición de resistencias por métodos de cero R3 puede determinarse a partir de la escala asociada al hilo uniforme. RH - R3 n 1.2. Puente de cajas a décadas: en este tipo de puentes la relación R1/R2 toma valores de la forma 10 donde n varía, en general, entre –3 y +3. R3 está constituida por tres a seis décadas de resistencias conectadas en serie que permiten modificar su valor en pasos discretos. El valor de la incógnita estará dado por: R X = γ . R 3 (6) donde: n γ: 10 , siendo –3< n < +3. Estas resistencias, precisas, con forma de bobinas. Las más utilizadas son las cajas en las cuales las resistencias se conmutan por medio de llaves. La figura Nº 3 muestra un circuito de una caja que emplea bobinas en serie. Caja de resistencias R3 por pasos 100 Ω 10 Ω 1Ω 0,1 Ω RX RB G V R1 RG R2 Fig. Nº 3 Con dos brazos de relaciones fijas, R1 y R2, la caja de décadas se puede usar como R3 para equilibrar el puente de la figura Nº 3. La resistencia variable RB se utiliza para mantener la intensidad de corriente en los brazos del puente dentro de los valores permisibles para R1, R2, R3 y RX. Diferencia entre las dos configuraciones de puentes: en el puente de hilo siempre se puede obtener el equilibrio en forma directa, mientras que en de cajas de décadas se obtiene por interpolación, ya que γ y R son discretos. Pero en el puente de hilo aparece un error de lectura adicional, que es la indeterminación en la posición del cursor. 2. Interpolación: Trabajando con los puentes de caja de décadas, como la variación de R3 no es continua, se puede presentar el caso que la mínima variación de R3, por ejemplo de 1 Ω, haga pasar el índice del galvanómetro de uno al otro lado del cero; es decir, puede suceder que no se consiga el equilibrio del puente. En este caso el valor de R3 correspondiente al equilibrio se determina mediante la interpolación de la siguiente manera: Sea R3+ un valor particular de R3, que provoca una desviación α+ del índice del galvanómetro y R3> R3+ otro valor de R3, que provoca una desviación α- en sentido opuesto del índice del galvanómetro. Si las variaciones de R3 no superan el 3 % de su valor se puede considerar que el tramo AB de la función α = f(R3) se reduce a un segmento de recta , o sea se desprecian los términos de orden superior en el desarrollo de Taylor, como se representa en la figura Nº 4. En ese caso resulta como valor de R3 correspondiente al equilibrio, el que anula la deflexión α: α+ + + + R 3 = R 3 + α . cotg θ = R 3 + − . ( R -3 - R +3 ) (7) α + α+ I-2 Medidas Electrónicas I Medición de resistencias por métodos de cero Por ejemplo una desviación hacia la derecha del galvanómetro puede indicar que la resistencia desconocida es mayor que la indicada por el puente, o en otras palabras que debe incrementarse R3 para anular la indicación del detector. Una deflexión del galvanómetro hacia la izquierda significa que debe disminuirse R3 para obtener el equilibrio. α α + 0 α A Θ R3 - R3 + R3 R3 Fig. Nº 4 − B La interpolación se usa frecuentemente cuando se trabaja con el puente y no está sujeta a errores de instrumental serios, pues la mayoría de los galvanómetros son prácticamente lineales en el rango próximo a cero. Por otra parte la interpolación es significativa solamente dentro de los límites de la incertidumbre de la década. Con un galvanómetro de gran sensibilidad los errores de instrumento son despreciables en comparación con la incertidumbre de la década y resistencia de los conductores. 3. Análisis de los errores: Fuentes de error: de acuerdo con la clasificación de errores se tiene: a) Errores groseros: se consideran que no existen. b) Errores sistemáticos: b-1) Errores de instrumental: son los debidos a R1, R2 y R3 ya que las conocemos con una determinada tolerancia b-2) Error de método: se considera que no hay. b-3) Error debido a las condiciones ambientales: b-3.1) Por variación de la temperatura que producirá variaciones en los valores de las resistencias, ya sea por temperatura ambiente o efecto Joule. b-3.2) Debido a la f.e.m. térmica. b-4) Debido a las resistencias de contacto y de aislación. c) Error de lectura: se debe a no poder determinar correctamente la indicación de cero en el galvanómetro. 3.1. Error de instrumental: el fabricante especifica los errores de los valores de R3 y γ. ∆R 3 ∆γ << γ R3 ∆R 3 ∆γ Por ejemplo si = 0,01 % y = 0,005 % , sabiendo que R X = γ . R 3 se tendrá: R3 γ ∆R X ∆γ = ± RX γ + ∆R 3 R3 (8) 3.2. Errores debido a las condiciones ambientales: 3.2.1. Variación de la resistencia con la temperatura: las resistencias que se utilizan en los puentes dependen de la temperatura. Si se observa la expresión: RX = γ . R3 se verá que la relación γ es independiente de las variaciones de la temperatura, pero no es así con R3. Para ver la gravitación de este error se supone que se utilizan resistencias construidas con manganina cuyo coeficiente de temperatura es de 10 p.p.m / ºC. Si se tiene un ∆T = 10 ºC, se tendrá: ∆R 3 = 100 p. p. m = 0,01 % R3 Si el puente posee un error de instrumental de 0,1 %, el error debido a la variación de la temperatura se lo puede considerar despreciable. Pero si el error de instrumental fuera del orden de 0,01 % entonces no se puede despreciar el error debido a la variación de la temperatura. I-3 Medidas Electrónicas I Medición de resistencias por métodos de cero 3.2.2. Variación de la resistencia por efecto Joule: se considera que γ no varía con la temperatura o por efecto Joule ya que R1 y R2 son del mismo material, pero sí pueden hacerlo R3 y RX. 3.2.3. Debido a las f.e.m. térmicas: se puede eliminar con un falso cero de la siguiente manera: R1 RX • Con L2 abierta sin energizar el circuito se cierra L1. • Si el galvanómetro deflexiona hay f.e.m. térmica ya que es un circuito pasivo. • Se soluciona corriendo el cero del galvanómetro. G RG L1 R2 R3 L2 RV V 3.3. Errores debido a las resistencias espúreas: si se ponen en evidencia las resistencias espúreas el circuito quedará: RX Si RX << 1 Ω. R1 G RX RConductor RContacto Resp = Rconductor + Rcontacto 0,0001 Ω La resistencia de contacto es variable y depende de las condiciones ambientales (humedad, presión, temperatura). Por lo tanto si se desea medir una resistencia RX = 0,01 Ω se comete un error debido a las resistencias espúreas, en el peor de los casos será: RG R2 L1 Fig. Nº 5 0,001 Ω. R3 ∆R X RX esp R 'X - R X 0,001 . 100 = 10 % . 100 = % = 0,01 RX 3.4. Error por insensibilidad del galvanómetro: 3.4.1. Sensibilidad absoluta y relativa: si estando el puente en equilibrio se produce una variación de R3, circulará por la rama que contiene al galvanómetro una intensidad de corriente que producirá una desviación del índice del galvanómetro. Si se indica con ∆α la desviación del índice producida por una variación ∆R3 de la resistencia de ajuste alrededor de su posición de equilibrio, se define como sensibilidad absoluta del sistema a: dα ∆α S a = lim = (9) ∆R 3 → 0 ∆R dR 3 3 La sensibilidad absoluta permite comparar: a) Dos puentes o instrumentos. b) Un mismo puente distintamente dimensionado, distintos valores de SG, RG o V para medir la misma resistencia incógnita. Se dirá que un puente es más sensible que otro cuanto mayor sea la desviación del índice (efecto) para una misma variación de R3 (causa). En cambio, la sensibilidad absoluta no permite comparar las sensibilidades correspondientes a dos determinaciones realizadas con el mismo puente de dos resistencias de valor diferente. Sucede lo mismo que con los errores absolutos de medida de diferentes grandores de la misma especie, el conocimiento de los cuales no permite determinar que grandor se ha determinado con menor error, o sea, con mayor exactitud. Así como en este caso es el concepto de error relativo quien resuelve el problema, se I-4 Medidas Electrónicas I Medición de resistencias por métodos de cero debe introducir el concepto de sensibilidad relativa para poder establecer las mejores condiciones de sensibilidad de un mismo puente. Se define sensibilidad relativa S, a la relación de la variación de la magnitud indicadora, o de salida, a la variación relativa de la magnitud de ajuste, o de entrada. En este caso será: ∆α ∆α (10) = R3 . S = ∆R 3 ∆R 3 R3 y en el límite: S = R3 . dα = R3 . Sa dR 3 (11) La sensibilidad se determina experimentalmente provocando variaciones de R3 ( R +3 y R -3 ) alrededor de la posición de equilibrio y midiendo las correspondientes deflexiones α+ y α-. El valor de R3 que corresponde al equilibrio está dado por la expresión (7), reemplazando en la expresión (10) y teniendo presente que ∆α = α+ + α- y ∆R3 = R -3 - R +3 resulta: R +3 α− + α+ + − + = α + (α + α ) . S = R3 . (12) R -3 - R +3 R 3 - R +3 Para el cálculo se utiliza la expresión que sea más cómoda. 3.4.2. Estudio de la sensibilidad: de acuerdo a las definiciones dadas, la sensibilidad se calcula con la expresión (10). Si SG es la sensibilidad del galvanómetro en div/A, la deflexión del mismo será: ∆α = SG . ∆IG (13) y la expresión (10) puede escribirse: ∆I G S = SG . R 3 . (14) ∆R 3 Para expresar la sensibilidad en función de los parámetros del puente es necesario calcular la intensidad de corriente ∆IG que circula por el galvanómetro para un desbalance ∆R3 alrededor de la posición de equilibrio. Para ello se aplicará el teorema de compensación en su forma aproximada. En el esquema de la figura Nº 6 cuando el puente se encuentra en equilibrio, IG = 0, se verifica: R1 RX = . R 3 = γ . R 3 (15) R2 donde γ es la relación indicada por el selector del puente y R3 el valor de las décadas de resistencias. En la figura Nº 6 se ha agregado la resistencia RB en serie con la fuente de alimentación, que es la suma de la resistencia interna de la fuente RV y una resistencia adicional, para dar generalidad al desarrollo. De acuerdo a lo visto, al modificar la relación γ se mantiene constante la suma de las resistencias R1 y R2: R1 + R2 = RC = constante (16) R1 RX R1 RX G IG = 0 G RG I3 R2 ∆IG R3 RB RG ∆R3 . I3 R2 R3 RB V Fig. Nº 6 Fig. Nº 7 Para la condición de equilibrio la intensidad de corriente por la resistencia R3 se obtiene multiplicando la intensidad de corriente de la fuente por la relación : R1 + R X R1 + R 2 + R 3 + R X es decir: I-5 Medidas Electrónicas I I3 = RB + Medición de resistencias por métodos de cero (R V 2 + R 3 ) . (R 1 + R X ) . R1 + R X R1 + R 2 + R 3 + R X (17) R1 + R 2 + R 3 + R X Denominando RM, resistencia de malla a la suma de las cuatro resistencias que configuran el puente para la condición de equilibrio: RM = R1 + R2 + R3 + RX (18) la expresión (17) se puede escribir: V . (R 1 + R X ) (19) I3 = R B . R M + (R 2 + R 3 ) . (R1 + R X ) Si se altera la resistencia R3 en ∆R3 se modifican las intensidades de corriente en todas las ramas, en particular la intensidad de corriente que atraviesa al galvanómetro variará en ∆IG y como su intensidad de corriente inicial era nula esta variación será igual a la intensidad de corriente total por el detector. Para calcular esa variación se pasiva, en el esquema de la figura Nº 6, la fuente V y se intercala en serie en la rama de R3 la f.e.m. de compensación (I3 . ∆R3) en oposición al sentido de la intensidad de corriente original. Se tiene así el esquema de la figura Nº 7 donde la incógnita que interesa es ∆IG. Nótese que se está usando la forma aproximada del teorema de compensación, ya que no se incluye ∆R3 en la figura Nº 7 y por lo tanto la solución estará afectada de un error que en todos los casos será inferior a la relación ∆R3 / R3. La simplificación debido a despreciar ∆R3 frente a R3 no resulta evidente en la figura Nº 7, pero surge a luz si se aplica el teorema de reciprocidad intercambiando la f.e.m. (I3 . ∆R3) con el galvanómetro como se muestra en la figura Nº 8. El teorema de reciprocidad afirma que la intensidad de corriente que circula por la rama R3 de la figura Nº 8 es idéntica a la que atraviesa la rama RG en la figura Nº 7; pero en la figura Nº 8 la f.e.m. de compensación está aplicada a un puente balanceado, aquí se ve la ventaja de la forma aproximada del teorema de compensación, por lo que la intensidad de corriente a través de la resistencia RB es nula y la intensidad de corriente por las otras ramas del circuito es independiente del valor particular de RB. Esto permite realizar el análisis adoptando un valor conveniente para RB, por ejemplo infinito (circuito abierto). R1 RX ∆R3 . I3 RG R2 ∆IG Fig. Nº 8 R3 RB En la figura Nº 8, suponiendo RB = ∞, la intensidad de corriente en la rama R3 vale: I 3 . ∆R 3 R1 + R 2 ∆I G = . (20) (R 1 + R 2 ) . (R 3 + R X ) R 1 + R 2 + R 3 + R X RG + R1 + R 2 + R 3 + R X Teniendo en cuenta la expresión (18) y reemplazando la expresión (19) en la (20): V . ( R 1 + R 2 ) . ( R 1 + R X ) . ∆R 3 ∆I G = R G . R M + (R 1 + R 2 ) . (R 3 + R X ) . R B . R M + (R 2 + R 3 ) . (R 1 + R X ) [ ] [ Reemplazando en la expresión (14) se tiene la sensibilidad: S G . V. R 3 . ( R 1 + R 2 ) . ( R 1 + R X ) S = R G . R M + (R 1 + R 2 ) . (R 3 + R X ) . R B . R M + (R 2 + R 3 ) . [ ] [ (R 1 ] (21) ] (22) + RX ) Esta es una expresión general aplicable a cualquier puente. Hay que aclarar que no todos los parámetros del segundo miembro son independientes pues las resistencias del puente están vinculadas por I-6 Medidas Electrónicas I Medición de resistencias por métodos de cero la relación γ y la resistencia a medir RX, además de los parámetros externos al puente como V, RB, SG y RG. En primer lugar se trabajará sin resistencias en serie con la fuente y suponiendo despreciable la resistencia interna de la fuente por lo que se tendrá RB = 0. Teniendo en cuenta además las expresiones (16) y (22) quedará: SG . V . R C . R 3 S = (23) (R 2 + R 3 ) . R G . R M + R C . (R 3 + R X ) [ ] Interesa expresar R1, R2, R3 y RM en función de RC, constante para este puente, γ y RX. Para ello se debe tener en cuenta que: R 1 = γ . R 2 = γ . ( R C - R 1 ) ∴ R 1 . (1 + γ ) = γ . R C R2 R1 γ . RC = ; R M = R1 + R 2 + R 3 + R X = = R3 RX R X . (1 + γ ) Reemplazando en la expresión (23): SG . V . R C S = RX γ . RC 1 + . R G . R C + + RX + RC . γ R X (1 + γ ) RC + RX + RX γ RX + RX γ Agrupando: S = SG . V . R C γ . RC RX 1 + . R G . R C + ( R G + R C ) . + RX γ R X (1 + γ ) Simplificando RC en el segundo corchete y eliminando los corchetes en el denominador: SG . V S = RG RG . RC . γ 1 + γ . RX + R G + (R G + R C ) + . 1 + RC γ R X . (1 + γ ) Denominando F a la función de la relación del puente: 1 + γ F = (24) γ queda como expresión final de la sensibilidad para este puente en las condiciones supuestas, RB = 0: SG . V S = (25) RG RG . RC . F . RX + 2 . R G + R C + 1 + RC F . RX Se observa que: a) La sensibilidad es directamente proporcional a la sensibilidad amperométrica del galvanómetro y a la tensión de la fuente. Estas conclusiones son lógicas y podían deducirse sin realizar el análisis completo. b) Además la sensibilidad depende, en forma más complicada, de la resistencia interna del galvanómetro. c) Para resistencias a medir muy pequeñas, RX → 0, la sensibilidad puede expresarse aproximadamente por: SG . V . F . R X S Rx → 0 = (26) RG . RC Se nota que la sensibilidad tiende a cero cuando RX también tiende a cero. d) Para el caso de resistencias incógnitas de valor muy elevado, RX → ∞, la sensibilidad se puede calcular con un pequeño error mediante: SG . V S Rx → ∞ = (27) RG 1+ . F . RX RC También en este caso la sensibilidad tiende a anularse cuando la resistencia a medir se hace infinitamente grande. I-7 Medidas Electrónicas I Medición de resistencias por métodos de cero Sr Sr máx γ2 γ1 γ3 0 RX máx 1 RX máx 3 RX máx 2 RX Fig. Nº 9 e) De acuerdo a las conclusiones c) y d) debe haber algún valor particular de RX que produzca una sensibilidad máxima. Este valor se calcula por el proceso clásico del análisis matemático y resulta: RC RG (28) R X max = . F RC + RG La posición R del máximo de sensibilidad depende de la resistencia interna del galvanómetro, y para un galvanómetro dado de la posición del selector de relación. Elegido el galvanómetro: RG RC . = K = constante (29) RC + RG K R X max = ∴ F . R X max = K F La sensibilidad máxima resulta entonces: SG . V S max = (30) RG RG . RC .K + 2 . R G + R C + 1 + RC K Independiente de la posición del selector de relación, o sea de γ y RX. 3.5. Cálculo del error total para una medición: si se toman las debidas precauciones los errores debidos a f.e.m. térmicas de contacto, modificación de los valores de las resistencias calibradas por variación de la temperatura ambiente o por autocalentamiento de las mismas, efectos de las resistencias de contacto y de las de aislación, errores groseros; pueden eliminarse o hacerse despreciables. Sin embargo hay dos fuentes de error que siempre deben tenerse en cuenta: a) Errores debidos a inexactitudes de las resistencias R1, R2 y R3. b) Inexactitud del balance, por insensibilidad del galvanómetro. El cálculo del error de RX se realiza aplicando la teoría de propagación de errores a la expresión (3): ∆R x ∆R 1 ∆R 2 ∆R 3 = ± + + (31) Rx R1 R2 R3 R1 y R2 son resistencias fijas, en una medición, y por lo tanto los dos primeros términos del segundo miembro representan los errores de calibración correspondientes. En cambio R3 es la resistencia de ajuste y en consecuencia el último término de la expresión (31) involucra errores de calibración y ajuste. Para destacar este hecho conviene reescribir la expresión (31) separando los términos de acuerdo a las fuentes de error: ∆R 1 ∆R 3 ∆R x ∆R 2 ∆R 3 = ± + + + Rx R2 R 3 cal. R1 R 3 aj. (32) Los errores de calibración los suministra el fabricante en las especificaciones del puente. El error de ajuste se debe al error de lectura ∆α*, que se comete inclusive para desviación nula, en la determinación del cero del galvanómetro, que se traduce en una incertidumbre (∆R3)aj. en el conocimiento del valor de R3 que corresponde al equilibrio y se calcula por simple proporcionalidad a partir de la figura Nº 4. Si en las expresiones de la sensibilidad absoluta y relativa se reemplaza la variación ∆α por el error de lectura ∆α*, la variación ∆R3 toma el significado del error absoluto de ajuste (∆R3)aj. y las expresiones que permiten calcular el error absoluto y relativo de ajuste resultan respectivamente: (∆R ) 3 aj. ∆α * = Sa (33) I-8 Medidas Electrónicas I Medición de resistencias por métodos de cero ∆R 3 ∆α = S R 3 aj. (34) Debe observarse que la sensibilidad sólo se considera para el cálculo del error de ajuste, siendo estos conceptos inversamente proporcionales. En la determinación del error total interviene además un término constante, el error de calibración, que es independiente de la sensibilidad. Podría pensarse que en el caso en que la mínima variación de R3 no permita anular la indicación del galvanómetro, el valor que corresponde al equilibrio debería calcularse con la expresión (4), las expresiones que permiten calcular el error difieren de las dadas más arriba,. Ello no es cierto, como se demostrará a continuación. Si R3 debe determinarse con la expresión (4), la expresión que permite calcular el error de la medición sigue siendo la (31), donde los dos primeros términos del segundo miembro tienen en cuenta los errores de calibración de las resistencias fijas R1 y R2 y el último término debe calcularse propagando errores a partir de la expresión (4). En ésta R +3 y R -3 presenta errores de calibración, mientras α+ y αestán afectadas de errores de lectura. Aplicando la teoría de propagación de errores a la expresión (4): ∂ R 3 ∂ R3 ∂ R3 ∂ R3 + − + . R + . R + . + . ∆R 3 = ± ∆ ∆ ∆ α ∆ α (35) 3 3 ∂ R -3 ∂α+ ∂α ∂ R +3 Reemplazando las derivadas parciales: α+ α+ + ∆R 3 = ± 1 - − . ∆R 3 + − . ∆R -3 +.... + + α α α α + + (36) − + α α .... + R -3 - R 3+ . . ∆α + + − + 2 (α + α ) (α − + α + ) 2 Teniendo presente que, para una escala lineal, como sucede en los galvanómetros utilizados como detectores, los errores absolutos de lectura son constantes, es decir ∆α- = ∆α+ = ∆α* , donde con ∆α* se vuelve a designar el error de lectura para dar uniformidad a la nomenclatura; ∆R3 = eR3 . R3 y con la convención adoptada se tiene R -3 > R +3 ; se puede reducir la expresión anterior a la siguiente: R -3 - R +3 α+ + + * (37) ∆R 3 = ± e R3 . R 3 + − + . (R 3 - R 3 ) + − + . ∆α α + α α +α Reemplazando en la expresión (37) las expresiones (4) y (12) y dividiendo por R para tener el error relativo, se obtiene: ∆R 3 ∆α * = e R3 + (38) R3 S Expresión igual a las anteriores, pues eR3, representa el error de calibración de R3, mientras el otro término es idéntico a la expresión (34) y tiene en cuenta el error de ajuste. 3.6. Variación del error en función de RX – Rango de medición: en un puente dado el error en la determinación de una resistencia desconocida, RX, depende del valor de RX. En general, hay un amplio rango en el que se obtiene gran exactitud, pero la incertidumbre en la determinación de RX, puede llegar a ser importante si RX es demasiado grande o demasiado pequeña, para un puente dado. Se demostró anteriormente que el error total está compuesto por una parte debida a los elementos constructivos, denominados de calibración, y el error de lectura. Si se representa gráficamente ambos errores se tendrá: ∆α∗ Sr Sr ∆R1 + R1 + ∆R2 + R2 + ∆R3 R3 } ∆RX RX Fig. Nº 10 eLect eConst RX RX Esta representación permite determinar los intervalos y los γ en los cuales se puede medir resistencias para un máximo error especificado en la medición. I-9 Medidas Electrónicas I ∆RX RX γ1 Medición de resistencias por métodos de cero γ2 ∆RX RX γ3 γ SG ∆R X RX máx RX RX Fig. Nº 11 Fig. Nº 12 El criterio práctico para no computar el error de lectura será: ∆R X ∆R X Lect ≤ (39) 10 Const RX = R1 . R3 R2 ∆R X Lect = R1 . ∆R 3 R2 Lect (40) R2 . ∆R X Lect (41) R1 Por lo tanto, variando R3 a partir de la posición de equilibrio en ∆R3 de lectura se observa si el galvanómetro deflexiona, si es así se continua con la medición. Si no deflexiona, se puede aumentar la tensión de la fuente de alimentación V, o aumentar la sensibilidad del galvanómetro SG, o cambiar la relación γ o una combinación cualquiera entre ellas. ∆R 3 = I-10