Modelos y estructuras de datos
Anuncio

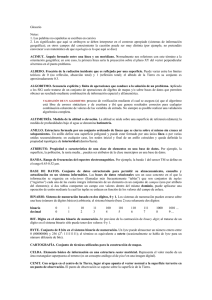
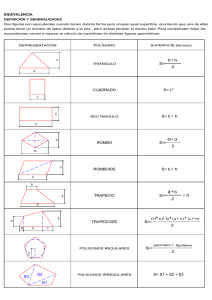
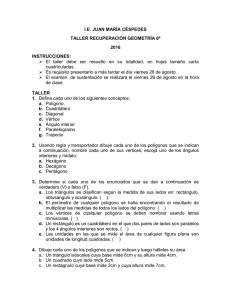
CURSO Fundamentos de Sistemas de Información Geográfica Grupo SIG UNIDAD 2 Datos geográficos y métodos de almacenamiento Tema 2 Modelos y estructuras de datos CIAF Centro de Investigación y Desarrollo en Información Geográfica BOGOTÁ , D. C. Modelos y estructuras de datos En función del modelo de datos implementado en cada sistema, podemos distinguir tres modelos de Sistemas de Información Geográfica: vectoriales, raster y datos orientados a objetos. Modelos de datos La base de datos espacial de un SIG no es más que un modelo del mundo real, una representación digital con base en objetos discretos. Una base de datos espacial es una colección de datos referenciados en el espacio que actúa como un modelo de la realidad (NCGIA, 1990). Las reglas según las cuales se modeliza el mundo real por medio de objetos discretos constituyen el modelo de datos. Modelo de datos vector Son aquellos Sistemas de Información Geográfica que utilizan vectores definidos por pares de coordenadas relativas a algún sistema cartográfico para la descripción de los objetos geográficos. Es importante aclarar que “modelo de datos” hace referencia a la conceptualización del espacio y “estructura de datos” se refiere a la implementación de esa conceptualización. El modelo de datos define la manera en que se van a representar las características espaciales en un SIG. Así, los tipos de modelos son: modelo vector y modelo raster. Figura 1. Fuente: http://www.aulati.net/wp-content/ uploads/2009/04/capas-raster-vectorial.jpg Por tanto, el modelo vectorial focaliza su interés en las entidades, en su posicionamiento sobre el espacio. Para modelizar las entidades del mundo real se utilizan tres tipos de objetos espaciales: puntos, líneas y polígonos (áreas); por ejemplo, un lago puede representarse por medio de un polígono. Así, los objetos no son más que representaciones digitales de las entidades, las cuales no siempre son elementos visibles; por ejemplo, las divisiones administrativas o censales. Geometría de los objetos El modelo de datos vector usa el sistema de coordenadas X,Y y emplea representaciones geométricas de punto, línea y polígono de acuerdo con el número de dimensiones y sus propiedades (tabla 1), así: Instituto Geográfico Agustín Codazzi.Todos los derechos comerciales reservados. Prohibida su reproducción para fines no académicos o de investigación. Tabla 1. Geometría de los objetos. Geometría Descripción Punto Figura 2. Yacimientos mineros. Tiene dimensión cero (0) y la propiedad de la posición. Un punto puede representar pozos, postes de energía, entre otros. La figura 2 representa los principales yacimientos mineros en la zona rural del municipio. Tradicionalmente, los datos adimensionales son tratados sobre coordenadas de dos ejes (x,y), pero en el caso de los pozos y las mediciones subterráneas que aportan datos sísmicos, que involucran tercera dimensión, su referencia al eje z se maneja como un atributo más. Sin embargo, ahora es posible su manipulación efectiva en 3D gracias a las nuevas tecnologías de modelamiento espacial y software que permiten su representación. Es importante reconocer que la estabilidad de objetos puntuales está relacionada con la escala de trabajo, ya que un punto en escala pequeña puede representar un área en escalas mayores. Así, por ejemplo, lo que en un mapa puede reconocerse puntualmente como un coliseo, en otro de mayor escala corresponde a un área circular. En la literatura SIG, un punto puede ser llamado nodo o vértice (Laurini y Thompson 1992). Línea Figura 3. Transporte nacional. Fuente: Visor de Mapas IGAC. http://ssiglapp.igac.gov.co:8080/limites/arcexplorer. html?origid=ESRI_World&server=http%3A//ssiglims. igac.gov.co&service=Catastro&usesession=true&windo wTitle=Catastro Tiene una dimensión y la propiedad de la longitud. Una línea puede representar, caminos, ríos, líneas de conducción eléctrica, túneles, entre otros. La figura 3 representa la cobertura vial nacional. Los datos lineales también cambian de naturaleza con la escala. Así, la línea que representa una avenida a cierta escala puede ser representada como un dato bidimensional o de área en una escala mayor. Polígono: tiene dos dimensiones y las propiedades de área y perímetro. Un polígono puede representar cuerpos de agua, parcelas. La figura 4 representa los cuerpos de agua en Barranquilla. Figura 4. Cobertura cuerpos de agua. Fuente: http://ssiglims.igac.gov.co/ssigl/mapas_de_ colombia/Estaticos/0302006000000000000200.html Polígono Figura 5. Ejemplos de polígonos. Fuente: Imagen original tomada de: http://www.mirabolivia.com/muestra_img.php?id_ imgbol=257&pag=2 Los polígonos a su vez pueden ser: • Polígono aislados: cuando el límite del polígono no es contiguo a ningún otro polígono. • Polígono adyacente: cuando se comparte parcialmente el límite del polígono con otro o varios polígonos. • Polígono Isla o Incluido: cuando un polígono está totalmente dentro de otro. La imagen 4, evidencia gráficamente los anteriores tipos de polígonos. Instituto Geográfico Agustín Codazzi.Todos los derechos comerciales reservados. Prohibida su reproducción para fines no académicos o de investigación. Volumétricos Los datos de volumen generan la representación de objetos o sucesos tridimensionales. Son ejemplos el relieve, las masas de aire, etc. La aproximación más frecuente de la tecnología actual para representar la tercera dimensión es mediante modelos digitales de elevación o DEM, que describen el volumen mediante la superficie que delimita los objetos (figura 6). Figura 6. Ejemplo datos volumétricos. Fuente: http://www.scielo.org.ar/img/revistas/raga/v64n2/a04f4.gif Figura 7. Ejemplo de datos raster. Modelo de datos raster A diferencia del modelo de datos vector, en el que la unidad de almacenamiento es el punto, en el modelo de datos raster el área de estudio es subdividida en cuadrículas regulares (celdas) para representar la parte más pequeña de la superficie de la Tierra (Kang-tsung Chang, 2004). A continuación se verán con mayor detalle las diferencias entre ambos modelos, conociendo sus ventajas y desventajas (tabla 2). Modelo de datos vector • • • Ventajas • • • • En cuanto al concepto, son ideales para representar variables discretas. Genera una estructura de datos más compacta que el modelo raster. Genera una codificación eficiente de la topología y, consecuentemente, una implementación más eficiente de las operaciones que requieren información topológica, como el análisis de redes. El modelo vectorial es más adecuado para generar salidas gráficas. Mejores estimaciones de área, perímetro y longitud. Se pueden adaptar bajo bases de datos orientadas a objetos. Análisis de redes más consistentes. • • Desventajas Es una estructura de datos más compleja que el modelo raster. Las operaciones de superposición de mapas son más difíciles de implementar. • Resulta poco eficiente cuando la variación espacial de los datos es muy alta. • El tratamiento y realce de las imágenes digitales no puede ser realizado de manera eficiente en el formato vectorial. • Las superposiciones exigen más verificación de errores y pueden ser más lentas. Modelo de datos raster • En cuanto al concepto, son ideales para representar variables continuas. • Es una estructura de datos simple. • Las operaciones de superposición de mapas se implementan de forma más rápida y eficiente. • Cuando la variación espacial de los datos es muy alta, el formato raster es una forma más eficiente de representación. • El formato raster es requerido para un eficiente tratamiento y realce de las imágenes digitales. • La diferente topología de las unidades espaciales dificulta los ejercicios de simulación. • Útil para análisis de grandes extensiones con baja precisión de propiedades espaciales. • • • • • La estructura de datos raster es menos compacta. Ciertas relaciones topológicas son más difíciles de representar. La salida de gráficos resulta menos estética. Alto nivel de error en estimaciones de área, perímetro y longitud. Gran espacio de almacenamiento a medida que aumenta la resolución. • Desperdicio de espacio de almacenamiento para datos espaciales esparcidos. • Análisis de redes muy complejos y menos consistentes. • Transformación de coordenadas menos eficiente. Fuente: Gutiérrez y Gould 1994. Instituto Geográfico Agustín Codazzi.Todos los derechos comerciales reservados. Prohibida su reproducción para fines no académicos o de investigación. Estructura de datos Estructura de datos vector Estructura de datos espagueti: para cada objeto espacial se registra su identificador, seguido por una lista de coordenadas de los vértices (puntos) que definen su posición en el espacio. Diccionario de vértices: un mapa se representa mediante dos archivos de datos: Un archivo está constituido por una relación de vértices, en la que constan las coordenadas X,Y, y otro archivo con los vértices que definen cada objeto. Esta estructura resuelve los problemas de repetición de coordenadas de los puntos, de la estructura espagueti; pero es muy pobre desde el punto de vista topológico. Estructura arco–nodo: el elemento fundamental es el arco. Donde el arco es una sucesión de líneas a segmentos que comienza en un nodo y termina en otro. Los nodos se marcan donde se produce la intersección entre líneas o donde una línea termina. En esta estructura se utilizan diferentes tablas para el registro de las relaciones topológicas: tabla para topología de polígonos, tabla de topología de nodos, tabla de topología de arcos, tabla de coordenadas de arcos. Su inconveniente radica en que, después de cada actualización, se requiere reconstruir la topología, lo cual puede tomar mucho tiempo cuando el archivo es grande. TIN (Red Irregular de Triángulos): esta estructura se basa en la estructura arco–nodo, diseñada especialmente para representar la elevación del terreno, pero puede ser utilizada para representar la distribución espacial de cualquier variable continua. Se trata de una red de triángulos irregulares interconectados, en la que se registran las coordenadas (X, Y) de los nodos que definen los triángulos y el valor de la elevación (Z) de dichos nodos, así como la contigüidad de los triángulos. Estructura de datos raster Estructuras raster simples Enumeración exhaustiva: se trata de almacenar uno por uno el valor de cada celda, de acuerdo con la secuencia que se establezca, generalmente fila a fila, a partir de la celda superior izquierda. Codificación por grupos de longitud variable: la codificación no se hace valor a valor, sino por grupos de valores iguales seguidos, existen dos modalidades: modalidad estándar y modalidad de punto valor. Estructuras raster jerárquicas Una derivación de las estructuras convencionales para ordenar datos raster, la más conocida, es la de árboles cuaternarios (quadtrees). Se trata de operar en una misma capa con distintos tamaños de bloques o grupos de celdas, lo que significa trabajar con una resolución variable. Figura 8. Fuente: IGAC, notas de clase. Instituto Geográfico Agustín Codazzi.Todos los derechos comerciales reservados. Prohibida su reproducción para fines no académicos o de investigación.