Capitulo 5 - Linealizacion_Predistorsion
Anuncio

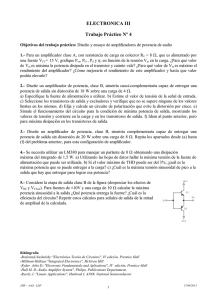
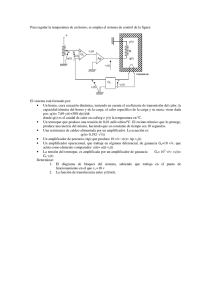
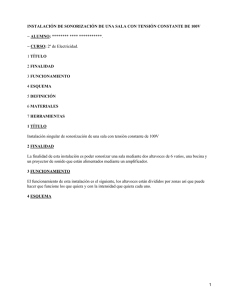
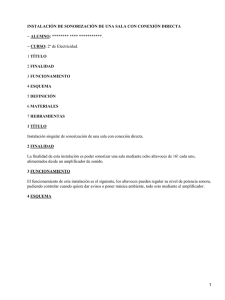
Capítulo 5: Técnicas de linealización. Predistorsión. CAPÍTULO 5: TÉCNICAS DE LINEALIZACIÓN. PREDISTORSIÓN. 5.1 Introducción En este capítulo realizaremos una descripción de las principales técnicas que existen para la linealización. Las podemos dividir en dos grandes grupos: 1) Métodos en los que se reduce la distorsión: Aquí se incluyen los sistemas en los que, mediante un mecanismo (linealización), se elimina o se compensa la distorsión introducida por el amplificador. Esta compensación se puede efectuar tomando una muestra de los productos de intermodulación generados por el PA e inyectándolos apropiadamente desfasados en la salida (feedforward), o tomando una muestra de la señal de salida e introducirla a la entrada (feedback), o bien mediante una alteración apropiada de la forma de la envolvente de la señal de entrada (predistorsión). 2) Métodos en los que se evita la distorsión: Aquí incluimos los métodos en los que la señal original con envolvente variante en el tiempo se transforma en dos señales de envolvente constante. Estas señales son amplificadas por separado y sin distorsión y posteriormente son recombinadas produciendo una réplica amplificada de la señal original (LINC). Otra alternativa es la de separar la señal con envolvente variable en sus componentes polares de amplitud y fase. La amplitud es utilizada para modular la tensión de alimentación del amplificador y la fase es incorporada en una señal con envolvente constante que es amplificada sin distorsión en el PA (Envelope Elimination and Restoration, EE&R). 5.2 Feedback La técnica de feedback es muy simple y ofrece una reducción de la distorsión de intermodulación (IM) razonable. Desde su invención ha sido utilizada universalmente para la corrección de cualquier tipo de error. En esta técnica se sacrifica la ganancia del amplificador en favor de la linealidad. Cuando trabajamos con frecuencias de audio esto no es problema, ya que a esas frecuencias la estabilidad del dispositivo es relativamente fácil de lograr gracias al pequeño ancho de banda requerido. En cambio, cuando consideramos amplificadores de RF, los problemas en el uso de feedback llegan a ser considerables y todo el diseño debe hacerse con mucho cuidado [5.3]. En estos casos, el ancho de banda suele ser mayor que en audiofrecuencias, los ciclos temporales son mucho más pequeños de la señal de entrada (suponiendo que sea sinusoidal) y la ganancia y estabilidad son más difíciles de conseguir. Como resultado, la linealidad requerida en sistemas de RF es mucho mayor que la requerida en los sistemas de audio. En la Figura 5.1 se muestra el esquema de la versión directa de esta técnica, denominada direct feedback: 76 Capítulo 5: Técnicas de linealización. Predistorsión. Figura 5.1 Esquema técnica direct feedback En el camino hacia delante, véase la Figura 5.1, se encuentra el sistema que se pretende controlar, en nuestro caso el amplificador de potencia. Existe también un elemento comparador, que sirve para obtener la señal de error restando (en tensión) la señal de entrada con la señal a la salida de la retroalimentación. Si consideramos que el PA tiene una ganancia A y calculamos la relación entre la entrada x(t) y la salida y(t), llegamos al siguiente resultado: = (5.1) Asumiendo que la ganancia del amplificador es mucho mayor que el divisor de tensión, es decir, A>>K, podemos aproximar del siguiente modo: = (5.2) El resultado que se obtiene es una ganancia del sistema K que, aunque sea menor que la ganancia original del amplificador, es más estable (la ganancia K es mucho más fácil de controlar que la del amplificador). Además, esta reducción de la ganancia se puede superar en algunas aplicaciones realimentando una muestra de distorsión en lugar de una muestra de la señal de salida del amplificador. Por el contrario, en los sistemas RF, el requerimiento de que A>>K conlleva un coste elevado. En esos casos, sólo pueden aplicarse pequeñas cantidades de feedback en las etapas individuales del PA, con el resultado de que la reducción de la distorsión es menor. Aunque consiguiéramos reducir el problema aplicando el feedback en una multietapa completa del PA, la técnica de feedback puede volverse inestable, debido al retraso significativo a través del camino hacia delante del sistema respecto al periodo de la señal de entrada a la frecuencia RF de operación. En otras palabras, la estabilidad depende de la ganancia y el margen de fase del lazo [5.5]. Aparte de la versión directa de feedback que hemos presentado (direct feedback) existen otras versiones de linealización negativa agrupadas bajo el nombre de modulation feedback, a saber: realimentación polar (polar feedback), realimentación cartesiana (Cartesian feedback) y realimentación de la envolvente (envelope feedback). 77 Capítulo 5: Técnicas de linealización. Predistorsión. 5.3 Feedforward Esta técnica de linealización es la más eficaz y es empleada en la actualidad en sistemas multiportadora de frecuencia elevada, ya que ofrece simultáneamente excelentes prestaciones de ancho de banda y una buena disminución de la distorsión IM. La arquitectura de la misma se puede observar en la Figura 5.2. Figura 5.2: Esquema del linealizador feedforward Podemos resumir en los siguientes pasos el camino que recorre la señal de entrada [5.5]: 1) La señal de entrada se bifurca en dos ramas. 2) En la rama superior se coloca el PA que se quiere linealizar. 3) A la salida del PA se coloca un acoplador que extrae una muestra de la señal de la rama superior en la que tenemos la señal de entrada amplificada y a la que se añade la distorsión del PA. 4) En la rama inferior, a la señal de entrada se le aplica un retardo igual al que produce el amplificador. 5) Si a la señal que se extrae del acoplador le restamos la señal a la entrada de la rama inferior, nos queda aislada la distorsión que produce el PA. 6) Esta distorsión se amplifica y se añade a la rama inferior utilizando otro acoplador que invierte la fase de la distorsión. 7) A la señal de la rama superior (señal de entrada más distorsión) le hemos añadido la distorsión en contraste, por tanto, nos queda la señal de entrada amplificada. Las principales propiedades y ventajas respecto a la técnica feedback, que presenta la técnica feedforward son: 1) La corrección con feedforward no reduce (idealmente) la ganancia del PA. Esto supone una mejora respecto a feedback, en la cual la linealidad se consigue a costa de la ganancia. 2) El producto ganancia-ancho de banda se conserva en la banda de interés. Esto contrasta con la técnica feedback, en la que a menudo se requiere elevados anchos de banda para poder llegar a los niveles de corrección requeridos. 3) La corrección es independiente de la magnitud de los retrasos del amplificador dentro del sistema. Una alta ganancia en amplificadores RF seguramente tendrá un retraso de 78 Capítulo 5: Técnicas de linealización. Predistorsión. 4) 5) 6) 7) 8) grupo elevado y esto es desastroso para las formas feedback debido a que es una técnica potencialmente inestable. La corrección no se basa en eventos pasados. El proceso se basa en ver qué está ocurriendo actualmente. La configuración básica de feedforward es incondicionalmente estable. Esta es una de las ventajas más importantes. El nivel de corrección depende del número de etapas que se consideren. El coste es el principal factor que limita este número. El amplificador del error, idealmente, sólo necesita procesar la información de la distorsión del amplificador principal y, por tanto, puede ser de mucha menor potencia que el amplificador principal. En los sistemas feedforward de una sola etapa, el fallo de alguno de los dos amplificadores producirá una degradación de la respuesta y posiblemente una disminución en el nivel de potencia a la salida. Como inconvenientes destacamos el hecho de que, al ser de lazo abierto, no se compensan los cambios que sufren los componentes con el paso del tiempo y la temperatura. También es necesario mantener, en un alto grado sobre el ancho de banda de interés, los elementos del circuito tanto en amplitud como en fase. Por último, esta técnica requiere de un circuito más complejo que otras técnicas, como feedback. 5.4 Linear amplification with Nonlinear Components (LINC) La técnica LINC convierte la señal de entrada de envolvente no constante en dos señales de envolvente constante que son amplificadas por amplificadores clase C y después combinadas, con bajas pérdidas y gran aislamiento, antes de la transmisión. Así conseguimos una versión amplificada de la señal original [5.3]. Dado que la señal es en general una señal de gran ancho de banda y dependiente de la modulación, un balance imperfecto entre las ramas del LINC hace que la porción no cancelada de la señal aparezca a la salida del combinador, como distorsión fuera de banda. Aún logrando un balance perfecto, las técnicas LINC que hacen uso de combinadores de potencia convencionales son susceptibles a la modulación empleada, y se ha observado que la eficiencia de potencia disminuye en los sistemas M-arios a medida que aumenta M. En la Figura 5.3 se representa el esquema de la técnica comentada. Figura 5.3: Esquema de la técnica LINC 79 Capítulo 5: Técnicas de linealización. Predistorsión. 5.5 Envelope Elimination and Restoration (EE&R) El esquema básico de un linealizador mediante la eliminación y restauración de la envolvente se muestra en la Figura 5.4. A una frecuencia intermedia, la señal de entrada es dividida en sus dos componentes polares: la envolvente y la fase , ésta última contenida en una señal cos + con envolvente constante a la frecuencia intermedia original. La señal con envolvente constante es trasladada a radiofrecuencia mediante un mezclador y posteriormente amplificada sin distorsión en el amplificador de potencia. La envolvente variable es restituida a la señal amplificada mediante la modulación de la tensión de alimentación del PA. Esta técnica presenta dos problemas: por un lado es crítico que la fase sea la misma en los dos caminos que recorre la señal; por otro lado, restablecer la envolvente de forma eficiente desde el punto de vista de la potencia es complicado [5.5]. Figura 5.4: Esquema EE&R. 5.6 Predistorsión Esta es la técnica elegida para linealizar nuestro amplificador de potencia en el proyecto que nos atañe. Esta técnica trata de modificar las características de la señal modulada antes de pasar por la parte no lineal de nuestro sistema, i.e. el amplificador de potencia. Por lo general, se trata de un algoritmo que actúa sobre la señal que queremos transmitir en base a unos coeficientes de un modelo que hemos supuesto para estimar las no linealidades. Las dos partes más importantes a la hora de diseñar un predistorsionador son: el modelado de la parte no lineal (con memoria a ser posible) del sistema; y el método de ajuste de los coeficientes de ese algoritmo para conseguir un resultado global lineal. Además, el funcionamiento del predistorsionador se suele comprobar mediante medidas de laboratorio a nivel de circuito. Estos métodos basados en simulación de circuito y posteriores medidas de laboratorios se llaman técnicas de modelado basadas en el comportamiento (behavioral modeling). Hay que tener en cuenta que cualquier error de modelado a nivel de circuito se reflejará en el modelo de comportamiento. Alternativamente, se pueden derivar a partir de medidas realizadas sobre dispositivos, relacionando la forma de onda de salida con la de excitación. La principal limitación que ofrece este método es que la bondad del modelo 80 Capítulo 5: Técnicas de linealización. Predistorsión. resultante depende fuertemente de la calidad de las medidas realizadas, lo que hace necesario el uso de instrumentación muy específica, capaz de detectar efectos de memoria. Los modelos más usuales son los comentados en el Capítulo 4, con especial predilección por los modelos basados en series de Volterra. Estos modelos tienen la peculiaridad de que ofrecen buenos resultados tanto para sistemas no lineales con memoria como sin memoria. No obstante, como veremos a continuación, también son posibles otros modelos como los modelos en series de Fourier. Una vez escogido el modelo con el que trabajar, se procede a una identificación de parámetros. Para ello, se aplica el algoritmo, desde un estado inicial, a la señal y se hace pasar por la parte no lineal. A continuación, se recoge la salida y se realiza algún procedimiento de ajuste de los parámetros del algoritmo para conseguir una linealización lo mejor posible. Esto se suele hacer mediante algún tipo de regresión matemática, i.e mínimos cuadrados, y, en algunas ocasiones, se tiene en cuenta la estadística de la señal de entrada para conseguir un ajuste más rápido. La forma de ajustar será por iteración entrada-distorsión-recuperaciónajuste. Estas iteraciones se suelen hacer de dos formas: (i) de manera continua y adaptativa; y (ii) mediante entrenamiento. El método adaptativo se realiza de manera continua durante toda la transmisión de la señal. De esta forma, cambios en las características del PA o del canal en general pueden ser recogidos por el algoritmo, consiguiendo un ajuste bueno para infinidad de situaciones. Esto, siempre y cuando la velocidad de convergencia, i.e. cómo de rápido el algoritmo reajusta sus parámetros para conseguir un comportamiento no lineal, sea lo suficientemente rápido como para adaptarse a los cambios del canal. Por otro lado, los métodos basados en entrenamiento, consiguen el ajuste de los parámetros del algoritmo mediante señales de entrenamiento que se transmiten al comienzo de la vida de la transmisión y, ocasionalmente, en distintos momentos después de la puesta a punto inicial. Esto puede parecer peor que el caso anterior, pero es muy válido para canales en los que se prevé que la no linealidad cambie poco, o en los que el modelo de no linealidad se ajuste muy bien al comportamiento del PA. 5.6.1 Métodos adaptativos Los métodos adaptativos se llaman así por la forma en que consiguen la convergencia de sus parámetros, en contraposición con los métodos basados en entrenamiento. La mayoría de los métodos adaptativos se basan en una técnica que utiliza una tabla de datos (look up table). Esta se rellena a partir de muestras discretas proveniente de la aplicación de algún algoritmo de modelado, i.e. series de Volterra, a la señal que queremos transmitir. Es decir, usando un modelo, generamos una correspondencia entre valor de la señal de entrada y valor de la señal que debe pasar por el PA, de forma que la señal a la salida del PA tenga un comportamiento lineal con respecto a la señal que queremos transmitir [5.5]. 81 Capítulo 5: Técnicas de linealización. Predistorsión. Figura 5.5: Esquema de un predistorsionador adaptativo. En la Figura 5.5 se muestra la tabla de correspondencia (LUT) a la salida de la fuente y el bucle de realimentación del algoritmo adaptativo que rellena la LUT. Esto funciona bien para señales de banda estrecha. Sin embargo, si consideramos sistemas de banda ancha, el amplificador de potencia presenta memoria, la tabla con las muestras pre-computadas se hace muy grande y el procedimiento para la selección de la muestra siguiente se hace muy complejo. Además, si el amplificador cambia sus características, toda la tabla debe actualizarse y la estrategia de selección cambia de nuevo. Un desarrollo alternativo es la utilización de un esquema de control no lineal adaptativo, Figura 5.6, basado en el Modelo de Referencia Adaptativa de Control. Los parámetros del controlador (predistorsionador) son ajustados de manera adaptativa, para conseguir la mínima desviación con respecto al resultado objetivo, en nuestro caso, un comportamiento lineal. Las dificultades de este esquema no son triviales: una estructura de control específica junto con un algoritmo de control robusto deben ser diseñados. Se suele usar como criterio de diseño en estos casos maximizar la potencia entregada por el amplificador. Figura 5.6: Esquema de un predistorsionador basado en el modelo de Referencia Adaptativa de Control. 82 Capítulo 5: Técnicas de linealización. Predistorsión. 5.6.2 Predistorsión mediante Series de Fourier. Es un predistorsionador basado en series de Fourier para caso sin memoria. Se trata de aplicar las conocidas series de Fourier para estimar la no linealidad. El modelo de Fourier proviene de las series de Fourier aplicadas a la relación entrada/salida del sistema no lineal real. Si [] denota la relación del sistema no lineal, y x es la entrada, la aproximación de orden N de Fourier es la siguiente: [] ≈ [] = ∑% &'% ∙ !"# $ (5.3) Es importante recordar que, para evitar el aliasing en la aproximación dada por el modelo de Fourier, la señal de entrada debe estar limitada en banda, i.e. ∈ [−*+,$ , *+,$ ], 01 01 ./ = 02 ≤ 02 # 456 (5.4) Una vez que tenemos el orden, N, y la frecuencia (por elección), el sistema es lineal con el resto de coeficientes, 7 8. Esta propiedad hace posible el uso de un criterio de mínimos cuadrados para el diseño de los coeficientes 7 8 y, además, se pueden usar los métodos adaptativos clásicos para encontrar la solución. En los problemas de predistorsión del Amplificador de Potencia, son de especial interés los modelos que sólo consideran la parte par o impar de un modelo. Así, el modelo de Fourier admite una simplificación cuando tiene simetría impar o par. La simplificación es considerable al conseguirse coeficientes reales. 5.6.3 Predistorsionador basado en Series de Volterra El nombre de este predistorsionador se debe a que el modelo empleado para modelar la no linealidad serán las ya analizadas series de Volterra. En ocasiones será suficiente emplear un modelo simplificado del mismo, como los de Wiener y Hammerstein. Es el más empleado, por la exactitud de los resultados que proporciona, y por su capacidad de modelar los efectos de memoria y sin memoria [5.4]. Se puede emplear tanto con métodos de entrenamiento para conseguir el ajuste deseado, como con métodos adaptativos. En cuanto al ajuste de los parámetros, es muy común verlo junto con un ajuste de mínimos cuadrados. También se pueden encontrar artículos en los que se presenta con un estudio estadístico de la señal de entrada. El predistorsionador que implementaremos en al apartado siguiente usará el modelo simplificado de las series de Volterra que estudiamos en el capítulo 4, denominado Memory Polynomial [5.1]. A continuación lo desarrollaremos, se trata de un predistorsionador en bucle abierto. 83 Capítulo 5: Técnicas de linealización. Predistorsión. 5.6.3.1 Predistorsionador en bucle abierto La mayoría de las técnicas de predistorsión con memoria usan mecanismos de adaptación en bucle cerrado estimando los parámetros del predistorsionador digital (DPD) de forma iterativa. Esta configuración incrementa significativamente la complejidad del sistema y el coste de la implementación [5.1]. En este proyecto aplicamos la caracterización del DPD con memoria mediante un sistema en bucle abierto. Que nos permite la obtención de los parámetros del DPD mediante un simple proceso en offline. A continuación vemos una representación del esquema que vamos a desarrollar, Figura 5.7. Figura 5.7 Esquema del conjunto Predistorsionador-Amplificador de Potencia Para linealizar el PA tenemos dos maneras, que se basan en la teoría de la inversa de orden p: 1) Pre-inversión de orden p: De acuerdo con esta teoría, para linealizar el sistema H, podemos hacer que el sistema G, de la Figura 5.7 sea la pre-inversión de orden p del '= sistema H [5.2], como vemos en la Figura 5.8, y que llamaremos 9:;< . Esto requiere que todas las funciones de transferencia hasta las de orden p del sistema global Q sean cero, exceptuando la de primer orden: >[?@] = × ?@ + ∑B ?@] &:= > [ (5.5) Donde k es la ganancia esperada y > [∙] representa las no linealidades de orden n de Q. Puesto que las no linealidades más allá de del orden p son insignificantes, podemos considerar que el sistema Q llega a ser lineal después de la inversión de orden p de H. Generalmente, para obtener la pre inversa, tenemos que extraer la función H de antemano y entonces hacer luego la inversión aplicando (5.5). Pero este proceso es muy costoso computacionalmente para modelos con memoria. 84 Capítulo 5: Técnicas de linealización. Predistorsión. Figura 5.8: Esquema Pre-inverso 2) Post-inversión de orden p: El sistema H también puede ser linealizado insertando un '= bloque a continuación al PA que llamaremos post inversión de H, 9:/CD . El esquema lo podemos ver en la Figura 5.9. Figura 5.9: Esquema Post-inverso En este caso no es necesario caracterizar de antemano el PA y luego calcular la inversa. Veamos cómo es posible esto. Si asumimos que la entrada al sistema post-inverso, '= 9:/CD , es ?@, para hacer que el sistema global S sea lineal, la salida esperada del '= 9:/CD debe ser una versión amplificada y lineal de la entrada original al sistema S [5.1]. Ẽ @ = × ?@ (5.6) '= Donde k vuelva a ser la ganancia esperada. Por lo tanto, la función del 9:/CD puede ser extraída directamente de la entrada y salida medidas en el PA, ?@ e ?@. El '= problema está en que el bloque 9:/CD no se puede utilizar directamente en una aplicación real de un transmisor, ya que no es viable insertar un bloque linealizador después del PA. Se puede realizar un ajuste que hará realizable el diseño del DPD en bucle abierto. Está probado que en un sistema de Volterra, la pre-inversa de orden p de H, es idéntica a la postinversa de orden p de H dentro de las no linealidades de orden p. Por lo tanto, si con la post'= '= inversa de H, S llega a ser lineal, podemos entonces, reemplazar 9:/CD por 9:;< en el sistema Q y este sistema Q, llegará a ser lineal y se podrá utilizar en un transmisor real. Esto quiere decir que, para obtener los coeficientes del DPD, en vez de obtener los de '= '= la función 9:;< , obtenemos los del 9:/CD , ya que, la entrada y la salida de esta función las podemos tener disponibles de antemano con un proceso offline, sin tener que utilizar la estimación en bucle cerrado en tiempo real. 85 Capítulo 5: Técnicas de linealización. Predistorsión. 5.6.3.2 Representación con Serie de Volterra. Ganancia esperada. Igual que hicimos para el PA en el capítulo 4, vamos a utilizar una representación de la función usando una serie de Volterra simplificada teniendo en cuenta los efectos de memoria. N !'= EGH @ = ∑J&O ∑ !&=,/MM:,;D ℎ!,J @ − K|@ − K| (5.7) Siendo ẼGH @ la salida del DPD, ?@ la salida del PA y la entrada al DPD. Q es la longitud de la memoria y K es el orden de la no linealidad. Antes de obtener los coeficientes del kernel de Volterra del DPD, hay que normalizar los datos que intervienen en el modelo de extracción, para que el nivel de potencia sea el mismo al de la señal de entrada original y puedan ser usados directamente en el DPD después. Los predistorsionadores basados en lookup table (LUT) eligen como ganancia esperada la de máxima, que es la respuesta linealizada del PA, como podemos ver en la Figura 5.10. Sin embargo, como el predistorsionador solo puede corregir la distorsión hasta el límite del nivel de saturación del amplificador, es decir, el punto en el que cualquier incremento de la potencia de entrada no produce un incremento en la potencia de salida, por lo que la máxima entrada permitida para el predistorsionador puede sólo alcanzar el punto donde la respuesta lineal se cruza con el límite de saturación. Figura 5.10: Linealización para la ganancia máxima Por lo que, como observamos en la Figura 5.10, la entrada original al sistema y la entrada predistorsionada (la salida del DPD) tendrán diferentes valores de pico. Esto requerirá un esfuerzo de calibración y también incrementa la complejidad de controlar la potencia de entrada en el sistema final que implementemos debido a esta diferencia de niveles de pico que ocurren antes y después del DPD. Podemos solucionar este problema eligiendo una ganancia esperada que me normalice la señal de entrada predistorsionada para que alcance la máxima potencia de la entrada original, como se muestra en la Figura 5.11: 86 Capítulo 5: Técnicas de linealización. Predistorsión. Figura 5.11: Linealización con una ganancia esperada dirigida hasta el máximo nivel de potencia. Entonces podemos definir la ganancia esperada, k, de la siguiente manera: = G,$[|P?|] G,$[|$?|] (5.8) Donde ?@ y ?@ son la envolvente compleja de la salida y la entrada del PA, respectivamente. Hay que decir, que estamos asumiendo que la potencia de salida del PA aumenta monótonamente con la potencia de entrada, es decir, el pico de potencia ocurre solo con la máxima potencia de entrada [5.1]. Con esta ganancia esperada que hemos definido, la entrada original y la predistorsionada alcanzan el mismo nivel de potencia máximo en la entrada. El único problema es que hemos perdido ganancia en el sistema global. 5.6.3.3 Cálculo de los coeficientes del kernel de Volterra Ahora simplemente nos queda calcular los coeficientes del kernel de Volterra. Ya sabemos cómo normalizar las señales implicadas en la función (5.7), por lo que el procedimiento para calcular los coeficientes es el siguiente. La señal de salida del DPD será: ?@ y la de entrada normalizada: ?@Q , siendo k la ganancia esperada, ecuación (5.8), calculada anteriormente. Por lo tanto aplicando la técnica de los mínimos cuadrados: X UQ V ∙ TWWWWWWWW UQ VY R = STWWWWWWWW 9 '= X WWWWWWWW ∙ TUQ V ∙ *ZGH (5.9) Obtenemos los coeficientes deseados. Como se puede observar, se calcula de la misma manera que hemos calculado el PA en el capítulo anterior, en el apartado 4.4, pero ahora, teniendo en cuanta la normalización de las señales. 87 Capítulo 5: Técnicas de linealización. Predistorsión. 5.7 Bibliografía [5.1] Anding Zhu, Paul J. Draxler, Jonmei J. Yan, “Open-Loop Digital Predistorter for RF Power Amplifiers Using Dynamic Deviation Reduction-Based Volterra Series”, IEEE Transactions on microwave theory and techniques, vol. 56, No. 7, pp. 1524-1534, Julio 2008. [5.2] Chi-Hao Cheng, Edward J. Powers, “A reconsideration of the pth-order inverse Predistorter”, IEEE 49th Vehicular Technology Conference, vol. 2, pp. 1501-1504, Julio 1999. [5.3] Pedro Robustillo Bayón, “Implementación de un predistorsionador para no linealidades y modulación OFDM”, Proyecto Fin de Carrera, Escuela Técnica Superior de Ingeniería, Universidad de Sevilla, 2006. [5.4] A. Pages-Zamora, Miguel A. Lagunas, Tomás Jiménez “Memoryless Predistortion of Nonlinear Amplifiers Based on Fourier Series Based Models”, Statistical Signal and Array Processing, 1996. Proceedings., 8th IEEE Signal Processing Workshop, pp. 375-378, Junio 1996. [5.5] Alfonso Zozaya Sahaad, “Aportación a la Linealización de Amplificadores de Potencia Mediante la Teoría de la Hiperestabilidad”, Tesis Doctoral, Universidad Politécnica de Cataluña, 2002. 88