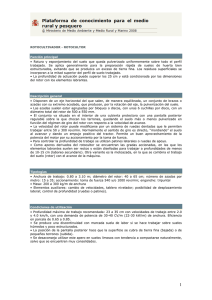
Servomotor Eléctrico. Vemos en la figura un esquema del circuito
Anuncio

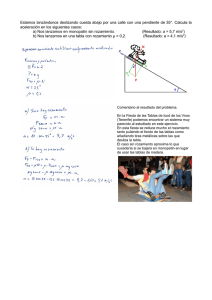
Sistemas de control 67-22Página Version 2003 1 de 5 Servomotor Eléctrico. Vemos en la figura un esquema del circuito parte mecánica del servomotor de corriente continua controlado por armadura , es decir mediante la tensión aplicada al rotor (armadura). En cuanto al campo para simplificar consideramos If corriente de campo constante. En el diagrama las abreviaturas significan lo siguiente Ra: resistencia del rotor. La: inductancia del Rotor ( la despreciamos luego) Ea: tensión aplicada al circuito del rotor Eb: fuerza contraelectromotriz inducida (Lenz). θ : ángulo girado por el eje motor J : momento de inercia total reducido al eje del motor F : Fricción viscosa total reducida al eje motor T : para motor Ia : corriente del circuito del rotor Ef : tensión aplicad al circuito del estator. El objetivo es calcular la siguiente transferencia: θ(s) Ea (s) Para lo cual se consideran las siguientes ecuaciones ; tengamos en cuenta que consideramos if constante para simplificar con lo que en la ecuación del par motor solo queda variable la corriente en el rotor.: pág. 1 Sistemas de control 67-22Página Version 2003 2 de 5 A) T = k1 ⋅ ia ⋅ ψ el par " T" es proporcional a la corriente " ia" y al flujo " ψ"; a su vez : (#) ψ = kf ⋅ i f reemplazando y agrupando las constantes se tiene : la expresión del par motor: B) T = k ⋅ ia desarrollo la ecuación del circuito del rotor para ea: ea = ia ⋅ Ra ⋅ + La ⋅ C) (I) dia + eb dt (II) Planteamos una ecuación mecánica: T = k ⋅ ia = J ⋅ d 2θ dθ + F⋅ 2 dt dt (III) J es el momento de inercia y F representa la fricción viscosa; si se presenta el problema de una caja reductora cuya relación de transmisión es “i ”, se debe calcular el “Jeq” (momento de inercia equivalente). Si se tiene por ejemplo: Dadas las pérdidas por rozamiento la potencia las potencias perdidas por el mismo se pueden expresar como el par torsor de rozamiento por la velocidad angular entonces Par torsor de Rozamiento T1 = F1 * ω1 y T2 = F2 * ω2 Potencia en el eje del motor Pot 1 = F1 * ω1* ω1 = F1 * (ω1)2 . pág. 2 Sistemas de control 67-22Página Version 2003 3 de 5 Potencia en el eje del de carga Pot 2 = F2 * ω2* ω2 = F2 * (ω2)2 y teniendo en cuenta que la relación de transmisión rozamiento es i = ω2/ω1 la potencia total perdida por Pot = Pot 1 + Pot 2 = Feq * (ω1)2 = F1 * (ω1)2 + F2 * (ω2)2 Feq * (ω1)2 = F1 * (ω1)2 + F2 * i2 * (ω1)2 Se puede entonces simplificar (ω1)2 Donde queda la expresión del coeficiente de rozamiento viscoso equivalente: Feq = F1 + F2 * i2 (IV) Para hallar el momento de inercia equivalente el criterio de semejanza que usamos es el de la energía cinética total que deberá ser igual considerando un Jeq en el eje del motor que sumando las energías cinéticas reales en el eje del motor y en el eje de carga. Energía cinética en el eje del motor Ec1 = ½ * J1 * (ω1)2 Energía cinética en el eje del de carga Ec2 = ½ * J2 * (ω2)2 Energía cinética Total en ambos ejes EcTotal = Ec1 + Ec2 EcTotal = Ec1 + Ec2 =½ * J equivalente * (ω1)2 = ½ * J1 * (ω1)2 + ½ * J2 * (ω2)2 y teniendo en cuenta que la relación de transmisión i = ω2/ω1 ½ * J equivalente * (ω1)2 = ½ * J1 * (ω1)2 + ½ * J2 * i2 * (ω1)2 Se puede entonces simplificar (ω1)2 Donde queda la expresión del coeficiente de rozamiento viscoso equivalente: ½ * J equivalente = J1 + J2 * i2 (V) Las ecuaciones (II), (III), (IV) y (V) resuelven el problema; si las transformamos queda: Ea (s) = Ia (s) ⋅ Ra + La ⋅ s ⋅ Ia (s) + Eb(s) K ⋅ Ia (s) = J ⋅ s 2 ⋅ θ(s) + F ⋅ s ⋅ θ(s) Eb(s) = kb ⋅ s ⋅ θ(s) (VI) por sencillez J=Jeq; F=Feq Operando con las ecuaciones (VI) (pudiendo armarlas como un diagrama de bloques y resolverlo con las ecuaciones demostradas para los mismos se tiene finalmente) tener en cuenta despreciar la inductancia en el circuito del rotor La obtenemos las siguientes expresiones para el servomotor eléctrico de corriente continua sin realimentar. pág. 3 Sistemas de control 67-22Página Version 2003 4 de 5 θ(s) kM = Ea (s) s ⋅ (τM ⋅ s + 1) k kM = Ra ⋅ F + k ⋅ kb Ra ⋅ J τM = Ra ⋅ F + k ⋅ kb Servomecanismo posicional. Ra r Amp. La T F N C J Vemos en el diagrama un esquema del servomecanismo de posición (por supuesto angular) realizado a partir de la realimentación del servomotor eléctrico de CC. El mismo constituye un sistema de lazo cerrado donde el sistema a controlar o Planta es el dicho motor y el diagrama de bloques que lo representa es el siguiente: pág. 4 Sistemas de control 67-22Página Version 2003 Ka = ganancia del amplificador. i = relación de transimisión de la caja reductora. 5 de 5 Kpote = constante de proporcionalidad otorgada al bloque por el potenciómetro. El objetivo es calcular la transferencia del ángulo del eje de salida respecto del ángulo de referencia introducido en el eje del control. Aplicando la expresión que da la transferencia de un lazo obtenemos la expresión en general Resolviendo entonces el lazo de la figura queda un sistema de segundo orden donde Y la relación de ganancias de los potenciometros es un factor de escala que valdría uno de ser ambos potenciometros de igual característica respecto de la resistencia y ángulo recorrido. pág. 5