PROBLEMA 1 - RESOLUCIÓN. El sistema tiene dos grados de
Anuncio

Resolución del examen de Junio 2003 – Problema 1
PROBLEMA 1 - RESOLUCIÓN.
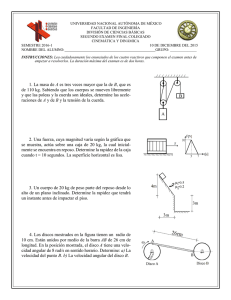
El sistema tiene dos grados de libertad. Pueden escogerse:
1. Giro de la barra OC y alargamiento del muelle.
2. Giro de la barra OC y giro (independiente de la barra) del disco.
En el primero de los casos, debe calcularse la velocidad angular del disco (que no es igual a
la de la barra, pues gira independientemente) sabiendo que en el contacto entre disco e
hilo existe rodadura. En el segundo caso, se conocen las velocidades angulares y es el
alargamiento del muelle el que debe calcularse en función de los grados de libertad
definidos.
Se resolverá el problema utilizando el segundo conjunto de grados de libertad:
ϕ : giro de la barra (considerado giro entrante), respecto a la horizontal
θ : giro del disco (considerado giro saliente), respecto a la horizontal
Cálculo de las ecuaciones diferenciales del movimiento
Dado que se trata de un sistema formado por enlaces holónomos, esclerónomos y
perfectos, en el cual todas las fuerzas aplicadas son conservativas, se obtendrán las EDM
aplicando Lagrange.
1
11 2 2
IOω2 =
ML ϕ
2
23
1
1
1
11
Tdisco = Mv2G + IGω2 = M(Lϕ )2 +
MR 2θ 2
2
2
2
22
es Lϕ y su velocidad angular, θ .
Tbarra =
, puesto que la velocidad del centro del disco
L
Vbarra = −Mg senϕ
2
Vdisco = −MgLsenϕ
Vmuelle =
1 2
Kδ
2
La dificultad del cálculo del potencial reside en obtener el alargamiento del muelle en
función de los grados de libertad del sistema. El alargamiento del muelle se debe a:
1) Descenso de la barra OC, como si el disco estuviera soldado a la barra (y no girara)
– Movimiento de arrastre del sistema con la barra. El muelle se alarga una cantidad
Lsenϕ .
2) Giro del disco con la barra quieta – Movimiento relativo. Tal y se ha definido el giro
del disco (giro saliente) el muelle se acorta una cantidad Rθ .
En definitiva: δ = Lsenϕ − Rθ
⇒
Vmuelle =
1
K(Lsenϕ − Rθ)2
2
La lagrangiana tendrá la siguiente expresión, donde ninguna variable es cíclica:
L =
2 2 2 1
3
1
ML ϕ + MR 2θ 2 + MgLsenϕ − K(Lsenϕ − Rθ)2
3
4
2
2
© TECNUN, 2003
Resolución del examen de Junio 2003 – Problema 1
Las ecuaciones de Lagrange establecen que:
d ∂L
∂L
(
)−
= 0
dt ∂qj
∂qj
Realizando las correspondientes operaciones se llega al sistema de ecuaciones diferenciales
del movimiento siguientes:
4
3
K
− g cos ϕ + cos ϕ(Lsenϕ − Rθ) = 0
Lϕ
3
2
M
1
+ K(Lsenϕ − Rθ) = 0
(2) MRθ
2
(1)
Aceleración inicial del punto del disco que ocupa la posición más alta en el instante inicial.
Procedimiento 1.
La aceleración pedida será (por campos de aceleraciones en el sólido rígido y llamando A al
punto que ocupa la posición más alta del disco en el instante inicial):
JJJG
JJJG G
JJJG
JJJG G
JJJG
JJJG
G
G
G
G
2
aA = aC + αdisco ∧ CA − ω2disco CA = aO + αbarra ∧ OC − ωbarra
OC + αdisco ∧ CA − ω2disco CA
Tratándose del instante inicial, momento en el cual el sistema parte del reposo, todas las
velocidades son nulas y el sistema ocupa la posición indicada en el enunciado. Por lo tanto:
JJJG G
JJJG
G
G
G
G
R (- i)
0L (-j) + θ
aA = αbarra ∧ OC + αdisco ∧ CA = ϕ
0
son las aceleraciones angulares de disco y barra en el instante inicial. Pueden
0 y θ
ϕ
0
determinarse de las EDM antes calculadas, particularizando éstas a dicho instante (todos
los ángulos nulos). Así, se obtiene que:
0 =
ϕ
9g ; θ0 = 0
8L
⇒
G
9g G
aA (0) =
(-j)
8
Aceleración inicial del punto del disco que ocupa la posición más alta en el instante inicial.
Procedimiento 2.
Las aceleraciones angulares de disco y barra pueden también determinarse directamente
en el instante inicial si se aplican los Teoremas Fundamentales de la Dinámica al sistema
en dicha posición.
Las aceleraciones de los centros de gravedad de barra y disco:
G
G
G
L G
aG (0) = α (-j) ; aC (0) = αL(-j)
2
(siendo α la aceleración angular inicial de la barra y β, la del disco – ver figura).
© TECNUN, 2003
Resolución del examen de Junio 2003 – Problema 1
Aislando los sólidos y aplicando las ecuaciones:
Oy
(1) Ox + Cx = 0
Cy
Ox
Cx
(2) Oy + Cy − Mg = −Mα
(3) Mg
Mg
L
2
L
1
− CyL = ML2α
2
3
Fmuelle
(4) − Cx = 0
(5) Fmuelle − Cy − Mg = −αLM
Cx
Cy
(6) RFmuelle =
β
1
MR2β
2
Mg
La fuerza del muelle, en módulo, toma el valor Kδ , siendo δ el alargamiento del resorte.
Como en el instante inicial el muelle está en su longitud natural, la fuerza ejercida por el
mismo será nula. La ecuación (6) muestra, entonces, que la aceleración angular inicial del
disco (β) también es nula.
Resolviendo el sistema de ecuaciones restantes se llega a que: α =
que el obtenido por el procedimiento anterior.
© TECNUN, 2003
9g
, mismo resultado
8L
Resolución del examen de Junio 2003 – Problema 2
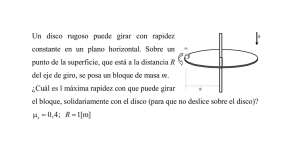
PROBLEMA 2 - RESOLUCIÓN.
El sistema tiene dos grados de libertad:
E3
O
a
E2
D
θ
A
a E
•
C
θ
B
•
ϕ : giro del eje, que arrastra al bastidor y a la
placa en su movimiento
θ : giro de la placa respecto de su lado AB
E1
ϕ
O'
G G G
Así pues, la velocidad angular de la placa será la suma de dos términos: ω = ϕ + θ .
Para poder calcular de manera fácil y correcta la energía cinética del sistema, es necesario
G
G
G
vincular al sólido un triedro de referencia E1, E2 , E3 . Dado que el sólido tiene un punto
{
}
fijo (al que llamaremos E, punto del lado AB que coincide con el eje de giro), colocaremos
el triedro con origen en dicho punto fijo, simplificando el cálculo de la energía cinética (ver
figura). El triedro colocado es un triedro principal de inercia en el punto E (todos los
productos de inercia son nulos).
Cálculo de la energía cinética de la placa
T =
1G G
1
triedro ppal
→ T = (Ix ω2x + Iy ω2y + Iz ω2z )
HEω
2
2
En el triedro representado en la figura los momentos de inercia toman los siguientes
valores:
Ix =
1
1
5
Ma2 ; Iy =
Ma2 ; Iz =
Ma2
3
12
12
G
G
G
La velocidad angular del sólido debe ser proyectada en los ejes E1, E2 , E3 :
{
G
G
G
G
G
G G G
G
proyectando ϕ
ω = ϕ + θ = ϕ k + θ E1
→ ω = θ E1 + ϕ senθ E2 + ϕ cos θ E3
1
1
1
1
T = (Ix ω2x + Iy ω2y + Iz ω2z ) = Ma2θ 2 +
Ma2ϕ 2 + Ma2ϕ 2 cos2 θ
2
6
24
6
© TECNUN, 2003
}
Resolución del examen de Junio 2003 – Problema 2
Cálculo del potencial gravitatorio
Vgrav = Mg
a
senθ
2
Cálculo del potencial elástico
Velas =
1 2 1
2
Kδ = K OC
2
2
La dificultad reside en el cálculo de la distancia entre los puntos O y C. El procedimiento
más sencillo consiste en hallar las coordenadas de los puntos O y C y restarlas. En lo que
sigue, se han utilizado unos ejes {x, y, z} tradicionales (vinculados al punto E y con el eje
z coincidente con el eje de giro), que giran junto con el eje OO’, para dar las coordenadas
de los puntos.
punto O (0, 0, a)
JJJG
a
OC ( , acosθ, asenθ − a)
a
2
punto C ( , acosθ, asenθ)
2
JJJG
9
El módulo del vector OC proporciona la longitud del muelle: δ2 = a2 ( − 2senθ)
4
Ecuaciones del movimiento
La resolución del problema (ver el final) necesita de las ecuaciones diferenciales del
movimiento. Se calculan, por lo tanto, antes de pasar a resolver lo que pide el problema
(valor de la energía cinética máxima).
L =
1
1
1
27
Ma2θ 2 +
Ma2ϕ 2 + Ma2ϕ 2 cos2 θ −
Mga + Mgasenθ
6
24
6
16
Puede observarse que la variable ϕ es cíclica. Se pueden hallar, entonces, las integrales
primeras del movimiento aplicando el Teorema de Conservación del Momento Canónico a la
variable ϕ y el Teorema de Conservación de la energía.
1
Ma2 ϕ (1 + 4 cos2 θ)
12
1
1
1
27
(EDM 2) E = Ma2θ 2 +
Ma2ϕ 2 + Ma2ϕ 2 cos2 θ +
Mga − Mgasenθ
6
24
6
16
(EDM 1) A =
El movimiento unidimensional equivalente viene definido por la ecuación resultante de
despejar ϕ en la (EDM 1) y sustituir en (EDM 2):
E=
1
6A2
27
Ma2θ 2 +
Mga − Mgasenθ
+
2
2
6
Ma (1 + 4 c o s θ) 16
Los valores de las constantes A y E los proporcionan las condiciones y datos del problema.
π
π
Por ejemplo, se conocen los puntos absidales del movimiento de la placa: θ =
y θ = , en
3
2
los cuales θ = 0 . Así, las constantes serán:
© TECNUN, 2003
Resolución del examen de Junio 2003 – Problema 2
A=
1
65
Ma ga ; E =
Mga
3
48
Energía cinética máxima de la placa en su movimiento
La energía cinética de la placa tiene la siguiente expresión, ya calculada:
T =
1
1
1
Ma2θ 2 +
Ma2ϕ 2 + Ma2ϕ 2 cos2 θ
6
24
6
Maximizar esta expresión (derivando e igualando a cero) no resulta sencillo. Un
procedimiento más directo consiste en minimizar el potencial. Dado que la suma de energía
cinética y potencial permanece constante a lo largo del movimiento (es igual al valor de la
energía), resulta claro ver que la energía cinética será tanto mayor cuanto menor sea el
potencial del sistema.
V = Vgrav + Velas =
27
Mga − Mgasenθ
16
Expresión que se observa será tanto menor cuanto mayor sea el valor de Mgasenθ , algo
π
que ocurre para θ = . Este valor del ángulo corresponde a uno de los puntos absidales del
2
movimiento. En él: θ = 0 y ϕ se resuelve de la ecuación (EDM 1).
ϕ 90º =
12 A
g
=4
2 1
a
Ma
Particularizando la energía cinética al mismo punto: T90º =
© TECNUN, 2003
2
Mga = TMax
3
Resolución del examen de Junio 2003 – Problema 3
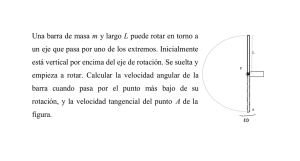
PROBLEMA 3 - RESOLUCIÓN.
Campo de velocidades en el instante justo anterior a la aplicación de la percusión
El sistema está en equilibrio. Ambos sólidos están en reposo. Las velocidades de todos los
puntos y las velocidades angulares de ambos sólidos son nulas.
Campo de velocidades en el instante posterior a la aplicación de la percusión
La barra está articulada en el punto O y así permanece después de la aplicación de la
percusión. Su campo de velocidades queda totalmente definido por su velocidad angular
( Ωbarra ), que supondremos entrante:
G
G
Ω
k
=
−Ω
barra
barra
barra G
JJJG
G
G
3 3R G
3R G
VG = VO + Ωbarra ∧ OG = −Ωbarra
i − Ωbarra
j
4
4
En cuanto al disco, rueda en su contacto con la barra, luego necesariamente debe deslizar
sobre el suelo. Al existir rodadura en N (punto de contacto entre disco y barra) puede
establecerse igualdad de velocidades entre disco y barra en ese punto y relacionar así la
velocidad del centro del disco (que es siempre horizontal) y la velocidad angular del disco
con la velocidad angular de la barra. Se obtiene así que:
G
Ω
= −Ωbarra
disco G disco
VC = −2RΩbarra
G
k
G
i
Análisis de percusiones
Se aplicará a cada uno de los sólidos los teoremas fundamentales de la dinámica de
percusiones.
A la hora de colocar las percusiones que actúan sobre cada sólido debe tenerse presente la
existencia de rozamiento en los contactos disco/suelo y disco/barra, lo cual supone que la
percusión de enlace no es sólo normal, sino que también aparece una componente
tangencial. En el primero de los casos (disco/suelo) se sabe que el disco desliza sobre el
suelo: la componente tangencial será fN. En el segundo caso (disco/barra) hay rodadura; la
componente tangencial es desconocida.
H
(1) fN − H
T
3
1
−H = 0
2
2
1
(3) (G) TR + fNR = MR2 (−Ωbarra )
2
(2) N + T
fN
© TECNUN, 2003
N
3
1
− T = M(−2RΩbarra )
2
2
Resolución del examen de Junio 2003 – Problema 3
Oy
Ox
(4) (O) HR 3 − P3R =
1
M(3R)2 (−Ωbarra )
3
H
T
P
Nótese que para la barra sólo se ha aplicado el teorema del momento cinético, ya que el
teorema de la cantidad de movimiento introduce como incógnitas las percusiones de enlace
en O (que no interesa calcular). Asimismo, téngase presente que el punto de contacto
entre disco y barra no coincide con el centro de gravedad de la barra; se trata de un punto
a una distancia R 3 del punto O.
La resolución del sistema de ecuaciones permite hallar el valor de la velocidad angular de la
barra después de la percusión, que proporciona el campo de velocidades de ambos sólidos
tras la percusión:
Ωbarra =
© TECNUN, 2003
3P
7MR