Apuntes de Introducci on a las Variedades Diferenciables
Anuncio

Apuntes
de
Introduccion a las
Variedades Diferenciables
La Laguna, 1997
Angel Montesdeoca
CONTENIDO
Variedades diferenciables. Subvariedades
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
Denicion de variedades diferenciables . . . . . . . . .
Ejemplos de variedades diferenciables . . . . . . . . . .
Propiedades topologicas de una variedad diferenciable
Funciones y aplicaciones diferenciables . . . . . . . . .
Espacio tangente y cotangente. Aplicaciones inducidas
Rango de una aplicacion diferenciable . . . . . . . . .
Subvariedades inmersas y embebidas o regulares . . .
Grupos y subgrupos de Lie . . . . . . . . . . . . . . .
Tensores y formas diferenciales sobre una variedad
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
2.10
Tensores sobre espacios vectoriales reales . . . . . . . .
Algebra tensorial . . . . . . . . . . . . . . . . . . . . .
Algebra exterior . . . . . . . . . . . . . . . . . . . . .
Tensores en un punto de una variedad . . . . . . . . .
Fibrado tangente. Campos de vectores . . . . . . . . .
Fibrado cotangente. 1{formas diferenciales . . . . . .
Fibrado tensorial. Campos de tensores . . . . . . . . .
Formas diferenciales . . . . . . . . . . . . . . . . . . .
Diferencial exterior . . . . . . . . . . . . . . . . . . . .
Formas cerradas y exactas. Cohomologa de De Rham
Sistemas diferenciales. Teorema de Frobenius
3.1
3.2
3.3
3.4
3.5
3.6
Curvas integrales y campos de vectores . . . .
Grupo unipametrico de transformaciones . . .
Derivada de Lie . . . . . . . . . . . . . . . . .
Sistemas diferenciables. Variedades integrales
Teorema de Frobenius . . . . . . . . . . . . .
Segunda forma del Teorema de Frobenius . .
i
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
5
9
12
15
28
30
42
51
51
56
62
68
69
73
75
80
82
86
93
93
96
100
105
109
114
Integracion en variedades diferenciables
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.10
4.11
Variedades de Riemann . . . . . . . . . . . . . . .
Variedades de Riemann como espacios metricos . .
Particion de la unidad . . . . . . . . . . . . . . . .
Orientacion de variedades . . . . . . . . . . . . . .
Integracion en IRn . . . . . . . . . . . . . . . . . .
Integracion sobre variedades diferenciables . . . . .
Integracion en variedades de Riemann . . . . . . .
Variedades con borde . . . . . . . . . . . . . . . . .
Teorema de Stokes . . . . . . . . . . . . . . . . . .
Teorema de Green y Teorema de la divergencia . .
Aplicacion a los grupos cohomologa de De Rham .
Diferentes enfoques de conexiones lineales
5.1
5.2
5.3
5.4
Enfoque axiomatico . . . . . . . .
Enfoque tensorial o clasico . . . . .
Conexiones denidas por caminos .
Enfoque por brados . . . . . . . .
Ejercicios
Bibliografa
Smbolos
Indice alfabetico
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
117
117
118
118
120
126
128
132
134
136
140
142
143
146
148
156
160
187
209
211
215
ii
0
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Variedades diferenciables
Subvariedades
1.1 Denicion de variedades diferenciables
Dado un espacio (conjunto), denido por alguna condicion geometrica, topologica, analtica, etc..., no siempre se puede establecer una correspondencia biunvoca
entre sus puntos y una serie de numeros, denominados coordenadas. En la mayora de
los casos nos tenemos que restringir a una parte de dicho espacio. Si ademas exigimos
que esta biyeccion tenga propiedades topologicas, la dicultad de encontrarla se
incrementa.
Nos restringiremos a aquellos espacios topologicos a cuyos puntos le podemos
asignar (localmente) un conjunto de numeros reales, de tal forma que esta correspondencia venga dada por un homeomorsmo.
Una variedad diferenciable, a \grosso modo", es un espacio topologico donde cada
punto tiene un entorno que esta parametrizado de tal forma que la transformacion
entre dos conjuntos de parametros esta dada por funciones diferenciables. Una
funcion sobre un tal espacio topologico puede ser considerada localmente como una
funcion de estos parametros. Por lo tanto, podemos denir la diferenciabilidad de
funciones y aplicaciones. Usando la idea de diferencial, podemos \linealizar" un
entorno sucientemente peque~no de un punto sobre una variedad y considerar un
espacio tangente. A lo largo de este curso discutiremos los hechos basicos del calculo
diferencial sobre una variedad diferenciable.
Comencemos con una serie de deniciones que nos conduzcan al concepto de
variedad diferenciable.
Denicion 1.1n Sea U IRn un conjunto abierto del espacio eucldeo n{dimensional IR y f : U ! IR una funcion valuada real. Se dice que f es diferenciable
de clase C k sobre U , o simplemente que f es de clase C k (k entero no
negativo) si existen las derivadas parciales
@ 1 ++n f
(@r1 )1 (@rn )n
(i 0; 1 + + n k)
1
2
1 Variedades diferenciables. Subvariedades
y son funciones continuas en U .
En particular, f es de clase C 0 si f es continua; y f es de clase C 1 si
@f (siendo ri : IRn ! IR la
existen y son continuas las derivadas parciales @r
i
i{esima proyeccion canonica (i=1,2,...,n)).
Una aplicacion F : U ! IRn, se dice que es diferenciable de clase C k si
cada una de sus funciones componentes, F i = ri F , i=1,2,...,n es de clase
C k . Se dice que F es de clase C 1 si es de clase C k , para todo k 0.
Y, nalmente, F es de clase C ! si es analtica, es decir, si F puede ser
expresada como una serie de Taylor convergente en un entorno de cada
punto del dominio de denicion.
Denicion 1.2 Una variedad topologica n{dimensional M es un espacio topologico
Hausdor (i.e. (separado o T2 ) si cualquier par de puntos distintos admiten entornos disjuntos), segundo contable (i.e.; con una base numerable
de conjuntos abiertos) y localmente eucldeo (i.e.; tal que para cada punto
x 2 M, existe un subconjunto abierto Ux entorno de x homeomorfo a un
subconjunto abierto del espacio eucldeo IRn).
Nota 1.3 De esta condicion local no se deduce que el espacio topologico M sea
Hausdor, como contraejemplo ver el Ejercicio 4.
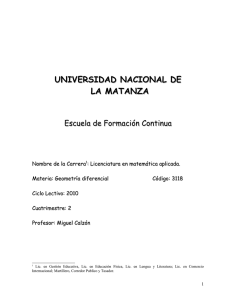
Nota 1.4 Podemos, si deseamos, elegir el homeomorsmo de la Denicion 1.2 como
'x : Ux ! 'x(Ux ), tal que 'x(x) = 0 y ademas que la imagen de 'x sea una
bola de centro el origen y radio "; B0n("). En efecto, dado cualquier 'x aplicando
homeomorcamente un conjunto abierto Ux conteniendo a x en un conjunto abierto
de IRn, sea " > 0 tal que B'nx(x)(") 'x(Ux). Sea : B'nx(x)(") ! B0n (") la
traslacion por 'x(x). Entonces
'ex = 'xj'x 1(B'nx(x) ("))
aplica 'x 1(B'nx (x)(")) homeomorcamente en B0n (").
Tambien, podemos elegir, en vez de una bola, un entorno cubico centrado en el
origen y de lado ", C0n(").
Denicion 1.5 Si ' : U ! '(U ) IRn es uno de los homeomorsmos de la Deni-
cion 1.2, siendo U un abierto conexo, ' recibe el nombre de homeomorsmo
coordenado; U abierto coordenado; al par (U; ') se le denomina sistema coordenado o carta; cada aplicacion continua xi = ri ' se denomina funcion
coordenada; y la n{upla (x1 ; x2 ; : : : ; xn ) se dice que es el sistema de funciones
coordenadas asociado a la carta (U; ').
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.1 Denicion de variedades diferenciables
M
3
ϕx
.x
Bϕn (x) (ε)
Ux
x
ε
. ϕx(x)
IRn
ϕx-1(Bϕn(x) (ε))
ϕx(Ux)
φ
ϕx
x
Fig. 1.1: Entornos homeomorfos a bolas en IRn
Nota 1.6 A veces, la carta (U; ') se representa por (U; (x1 ; : : : ; xn )).
Nota 1.7 Como la nocion de espacio localmente eucldeo es tan solo ligeramente
distinta de la nocion de variedad diferenciable que nos interesa en este curso, veremos
ejemplos de aquellos al dar los de variedades diferenciables.
Denicion 1.8 Un conjunto
S de cartas A = f (U ; ') 2 A g se denomina un
atlas si verica
U = M:
2A
Denicion 1.9 Una estructura diferenciable de clase C k (1 k 1) sobre una
variedad topologica M de dimension n es una coleccion
A = f (U ; ') 2 A g
de sistemas coordenados vericando las tres condiciones siguientes:
1.
S U = M
2A
(A es un atlas de M )
2. 8(; ) 2 A A, si U \ U 6= , la aplicacion
' ' 1 : '(U \ U ) ! ' (U \ U )
es diferenciable de clase C k . (A atlas diferenciable )
3. La coleccion A es maximal con respecto a la condicion 2; es decir: si
(U; ') es un sistema de coordenadas tal que ' ' 1 y ' ' 1 son de
clase C k para todo 2 A, entonces (U; ') 2 A.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4
1 Variedades diferenciables. Subvariedades
Nota 1.10 Si A0 = f (U ; ') 2 A g es una coleccion de sistemas coordenados
satisfaciendo a las condiciones 1 y 2 de la Denicion 1.9, entonces existe una unica
estructura diferenciable maximal A conteniendo a A0. En efecto, basta considerar
(
A = (U; ')
,
U abierto; ' : U ! '(U ) homeomorsmo;
' ' 1; ' ' 1 son de clase C k; 8(U; ') 2 A0
)
Entonces, A contiene a A0, claramente satisface 1, cumple la condicion 2 (Ejercicio 2) y A es maximal por construccion. As, A dene una estructura diferenciable
sobre M conteniendo a A0. Evidentemente, A es la unica estructura maximal que
contiene a A0.
M
Uα
IRn
ϕα(Uα)
Uβ
ϕα
ϕβ
IRn
ϕβ(Uβ)
ϕα
Fig. 1.2: Superposicion de entornos coordenados
Denicion 1.11 Una variedad diferenciable de clase C k y dimension n es un par
(M; A) formado por una variedad topologica M de dimension n y una estructura diferenciable A de clase C k sobre M.
En general, representamos la variedad diferenciable (M, A) simplemente por M,
sobrentendiendo que cuando nos referimos a la \variedad diferenciable M" se considera sobre M una estructura diferenciable A.
Para dar una estructura diferenciable sobre una variedad basta con dar un atlas
diferenciable (es decir, una coleccion de sistemas coordenados vericando las condiciones 1 y 2 de la denicion), y este se buscara en general no necesariamente maximal
sino lo mas peque~no posible.
Notese que un mismo conjunto puede ser dotado de estructuras diferenciables distintas (ver Ejemplo 1.22), por lo que se necesita dar una denicion de \equivalencia"
entre atlas denidos sobre un mismo conjunto:
Denicion 1.12 Dos atlas diferenciables sobre M son equivalentes si su union es
tambien un atlas diferenciable sobre M.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.2 Ejemplos de variedades diferenciables
5
Centraremos nuestro estudio especialmente en las variedades y funciones de clase
C 1. Esto se hace por comodidad, lo que nos permitira, entre otras ventajas, denir
un vector tangente de una forma elegante. La intencion no es adoptar las menos
hipotesis posibles sino mas bien usar aquellos conceptos que aparecen, de un modo
natural, en una situacion general. La restriccion no es demasiado drastica, como
muestra el siguiente resultado, debido a Whitney(1): \Un atlas de clase C k; (k > 0)
sobre una variedad paracompacta contiene un atlas de clase C 1." Sin embargo, si
tenemos una variedad topologica (de clase C 0) no siempre admite una estructura
diferenciable de clase C 1, como ha demostrado con su ejemplo Kervaire (2).
1.2 Ejemplos de variedades diferenciables
Ejemplo 1.13 IRn es una variedad diferenciable de dimension n.
En efecto, basta tomar como A la estructura diferenciable maximal que contiene
a A0 = f(IRn; 1IRn )g. Es decir, un atlas constituido por una sola carta formada por
el abierto U = IRn y el homeomorsmo coordenado ' = 1IRn , identidad en IRn:
Ejemplo 1.14 Si (M; A) es una variedad diferenciable de dimension n, todo abierto
U M es de nuevo una variedad diferenciable de dimension n (variedad inducida)
cuyo atlas viene dado por
AU = (U \ U; 'jU\U ) 8(U; ') 2 A :
En efecto, como los abiertos U recubren a M, V = U \ U son abiertos en U
que lo recubren. Las aplicaciones = 'jU \U : V ! (U \ U) = '(U \ U )
son homeomorsmos locales de U en IRn. Ademas, 1 son diferenciables al ser
las restricciones a '(U \ U \ U ) de ' ' 1.
Ejemplo 1.15 Variedad producto
Sean (M; A) y (M0 ; A0 ) variedades diferenciables de dimensiones n y n0 , respectivamente. Entonces el espacio producto M M0 se puede dotar, de forma canonica,
de una estructura de variedad diferenciable de dimension n + n0 , considerando para
ello el atlas
A0 = (U V ; ' ) 8(U; ') 2 A y 8(V ; ) 2 A0 :
p
Ejemplo 1.16 La esfera Sn = fx 2 IRn+1kxk = (x1 )2 + + (xn+1 )2 = 1g es
una variedad diferenciable de dimension n.
H. Whitney.- Geometric integration theory, Princeton, 1957.
M. Kervaire.- A manifolds which does not admit any dierentiable structure. Comm. Math.
Helv. 35(1961), pag 1{14.
(1)
(2)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
6
1 Variedades diferenciables. Subvariedades
Sus abiertos coordenados son los conjuntos
(j = 0; 1; k = 1; 2; : : : ; n + 1)
Ukj = x 2 Sn ( 1)j xk > 0
y los homeomorsmos coordenados son
'kj : Ukj ! B0n(1) = fx 2 IRn=kxk < 1g x 7! (x1 ; : : : ; xk 1 ; xk+1; : : : ; xn+1):
Resulta facil demostrar que este atlas es diferenciable, pues la aplicacion
'kj1 : B0n (1) ! Sn
tiene la coordenada k{esima igual a
(
0
11=2
X i 2A
1)j @1
(x )
;
i6=k
que es una funcion diferenciable en el sentido usual en B0n (1) y 'kj es la restriccion
de una aplicacion diferenciable de IRn+1 en IRn.
Ejemplo 1.17 El grupo lineal general GL(n; IR) admite una estructura diferenciable
de dimension n2.
GL(n; IR), conjunto de las matrices reales de orden n con
determinante2 no nulo,
2
n
se identica de forma natural con un subconjunto de IR ; as, si det: IRn ! IR es
la aplicacion determinante:
GL(n; IR) = det 1 (IR f0g)
2
y, como \det" es una funcion continua, GL(n; IR) se identica con un abierto de IRn .
La estructura diferenciable en GL(n; IR) se obtiene ahora como en el Ejemplo 1.14.
Ejemplo 1.18 El espacio proyectivo real Pn(IR) se puede dotar de estructura de
variedad diferenciable de dimension n.
El espacio proyectivo real Pn(IR) puede denirse como el cociente de IRn+1 f0g
por la relacion de equivalencia de proporcionalidad entre coordenadas homogeneas
x1 ; : : : ; xn+1.
Se puede tomar como funciones coordenadas, las funciones
i
fi : Pn(IR) ! IR; [(x1 ; : : : ; xn+1)] 7! xx ; x 6= 0 (i; = 1; : : : ; n + 1)
y por recubrimiento, los abiertos
U = [(x1 ; : : : ; xn+1)] x 6= 0
(su imagen recproca por la proyeccion canonica son abiertos
en IRn+1).
El atlas diferenciable esta formado por A = f(U ; ') = 1; : : : ; n + 1g siendo
los homeomorsmos coordenados ':
' = (f1 ; : : : ; f 1 ; f+1 ; : : : ; fn+1 ):
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.2 Ejemplos de variedades diferenciables
7
Ejemplo 1.19 La banda de Moebius
Desde el punto de vista topologico, puede ser descrita identicando un lado de
un rectangulo en el plano con su opuesto, recorrido en sentido contrario, en la forma
siguiente:
2
6
Consideremos en IR2 , el rectangulo
..........
?
R = f(x; y) 2 IR2 0 x 10; 0 < y < 2g
y en el denimos la relacion de equivalencia
14 siguiente:
Fig. 1.3: Banda de Moebius
8 x = x0
y = y0
0 < x < 10 0 < y < 2
<
0
0
0
0
0<y<2
(x; y) (x ; y ) () : x = 0; x = 10 y = 2 y
0
0
x = 10; x = 0 y = 2 y
0<y<2
2
4
6
8
10
El conjunto M = R= con la topologa cociente (considerando en R la topologa
inducida por el plano) es la banda de Moebius.
Para denir en M un atlas de clase C 1 procedemos como sigue: Sea p : R ! M
la proyeccion canonica y Ue1; Ue2 abiertos de R dados por
Ue1 = f(x; y) 2 R 2 < x < 8; 0 < y < 2g
Ue2 = f(x; y) 2 R 0 x < 4; 6 < x 10; 0 < y < 2g
y sean Ui = p(Uei ); i = 1; 2, que son abiertos en M, como se comprueba inmediatamente.
Denimos ahora
'e1 : Ue1 ! W1 IR2
'e2 : Ue2 ! W2 IR2
por
'e1(x; y) = (x; y)
'e2(x; y) =
(x; y)
si 6 < x 10
(10 + x; 2 y) si 0 x < 4
Es claro que 'e1 y 'e2 son continuas y W1 y W2 son los abiertos de IR2 dados por
W2 = f(x; y) 2 IR2 6 < x < 14; 0 < y < 2g:
W1 = f(x; y) 2 IR2 2 < x < 8; 0 < y < 2g
Como 'e1 y 'e2 son compatibles con la relacion de equivalencia en R, inducen las
aplicaciones
'1 : U1 ! W1
y
'2 : U2 ! W2;
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
8
1 Variedades diferenciables. Subvariedades
que se comprueba que son homeomorsmos. Para ver que A0 = f(U1 ; '1); (U2 ; '2)g
es un atlas de clase C 1 en M, basta comprobar que '2 '1 1 y '1 '2 1 son difeomorsmos. En efecto, por ejemplo, el primero
'2 '1 1 : '1(U1 \ U2 ) ! '2(U1 \ U2)
esta dado por
(x; y)
x<8 0<y<2
1
('2 '1 )(x; y) = (10 + x; 2 y) 62 <
<x<4 0<y<2
Ejemplo 1.20 Un espacio vectorial real E de dimension nita, tiene una estructura
natural de variedad.
En efecto, si fe1 ; : : : ; en g es una base de E, entonces los elementos de su base
dual f1 ; : : : ; n g de E son las funciones coordenadas de un sistema de coordenadas
globales sobre E. Tal sistema de coordenadas determina una estructura diferenciable
A sobre E. Esta estructura diferenciable es independiente de la base elegida, pues el
cambio de coordenadas estara dado por una matriz de coecientes constantes y no
singular.
Ejemplo 1.21 Sea f : IRn ! IR una funcion continua, su grafo f IRn+1 es una
variedad n{dimensional.
En f = f (x1 ; : : : ; xn; xn+1 ) xn+1 = f (x1 ; : : : ; xn ) g, consideramos un atlas
constituido por una sola carta ' : U = f ! IRn , denida como la proyeccion sobre
las n primeras coordenadas: '(x1 ; : : : ; xn+1) = (x1 ; : : : ; xn). La aplicacion inversa
' 1 esta dada por
' 1(x1 ; : : : ; xn ) = (x1 ; : : : ; xn ; f (x1 ; : : : ; xn))
que es, evidentemente, continua.
Ejemplo 1.22 Consideremos M1 = (IR; A1), donde el atlas A1 consta de la unica
carta 1IR : IR ! IR, y la variedad M2 = (IR; A2 ), cuyo atlas esta formado por la
carta ' : IR ! IR, denida por '(x) = x3 . Entonces las variedades M1 y M2 son
distintas ya que ' 1 no es de clase C 1 en el origen.
No obstante, estas variedades no son esencialmente distintas, como veremos en
el Ejemplo 1.39.
Ejemplo 1.23 El espacio de las conguraciones en un sistema mecanico es una variedad diferenciable de dimension igual al numero de grados de libertad del sistema.
1. El espacio de conguracion de un pendulo plano es representado como los puntos de una circunferencia tomando como coordenada el angulo que el pendulo
forma con una direccion ja.
2. El pendulo esferico, punto que dista una cantidad prejada de un punto jo,
tiene como espacio de conguracion una esfera.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.3 Propiedades topologicas de una variedad diferenciable
9
3. El espacio de conguracion de un pendulo doble plano (resp. esferico) es
S1 S1, es decir un toro (resp. S2 S2).
4. El espacio de conguracion de un solido con un punto jo es la variedad
SO(3; IR) , constituida por las matrices ortogonales 3 3 con determinante
igual a 1; las coordenadas que describen esta variedad son los angulos de Euler
que determinan la posicion de una terna ortonormal respecto de otra.
Se puede ver que SO(3; IR) es homeomorfo a la esfera S3 con los puntos diametralmente opuestos identicados, que es el espacio proyectivo real de tres
dimensiones P3(IR).
5. En toda la teora fsica macroscopica el fenomeno fundamental es el \suceso",
punto de una variedad de cuatro dimensiones, del espacio{tiempo: de las cuatro
coordenadas, tres son intrepretadas como coordenadas espaciales y una como
la coordenada temporal.
Nota 1.24 Veremos mas ejemplos de variedades en los parrafos dedicados al estudio
de subvariedades diferenciables. En especial, en el de subgrupos de Lie.
1.3 Propiedades topologicas de una variedad diferenciable
Comentaremos aqu algunas propiedades topologicas que posee una variedad diferenciable, las cuales son consecuencia inmediata de las hipotesis impuestas al espacio
topologico subyacente. Dichas hipotesis son muy poco restrictivas a la hora de considerar conjuntos sobre los que nos interesa denir una estructura diferenciable. Y
ademas, con estas restricciones topologicas garantizamos que sobre una variedad se
pueda denir conceptos como metrica, conexion e integral de una n{forma, entre
otros.
En los ejemplos de variedades diferenciables, que hemos rese~nado en el parrafo
anterior, no nos hemos preocupado de que los conjuntos, sobre los que hemos
construido atlas diferenciables, posean las propiedades topologicas requeridas en
la Denicion 1.2. Pues bien, que tales propiedades se cumplan, surge de alguno de
los resultados que veremos a continuacion.
Del hecho de ser localmente eucldea surgen las siguientes armaciones:
1. Una variedad diferenciable M es un espacio topologico localmente compacto.
2. Una variedad diferenciable M es localmente conexa.
3. Una variedad diferenciable M es conexa si y solo si M es conexa por arcos.
La comprobacion de las dos primeras armaciones es inmediata, sin mas que
considerar los homeomorsmos locales. En cuanto a la tercera, basta con establecer
que, para x 2 M, el conjunto
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
10
1 Variedades diferenciables. Subvariedades
Q = fy 2 M Existe un camino que une x con y g
coincide con M; esto es, demostrar que Q 6= , abierto y cerrado.
Nota 1.25 Supondremos, en caso de que una variedad n{dimensional M no sea
conexa, que todas sus componentes conexas son de la misma dimension.
Como hemos dicho las variedades diferenciables que vamos a considerar son de
clase C 1; apoyandonos en el resultado de Whitney (ver pag. 5) para variedades
paracompactas. Por lo que se hace necesario recordar este concepto e indicar su
relacion con las propiedades topologicas impuestas a una variedad.
Denicion 1.26 Un recubrimiento V = fV g2B de un espacio topologico X se
dice que es un renamiento de un recubrimiento dado U = fUg2A si, para
todo elemento V de V existe un elemento U de U que lo contiene.
Un recubrimiento U = fU g2A de un espacio topologico X es localmente
nito si para todo punto x 2 X , existe un conjunto abierto de X que contiene
a x y que intersecta solo a un numero nito de elementos de U .
Un espacio topologico X se llama paracompacto si es Hausdor, y todo
recubrimiento abierto del mismo posee un renamiento localmente nito.
Se tiene el siguiente resultado relativo a la paracompacidad de una variedad
diferenciable, que puede verse en cualquier libro de topologa general (3) o en [10,
pag. 9]:
Lema 1.27 Si X es un espacio topologico localmente compacto, Hausdor y segundo contable (por ejemplo, una variedad), entonces es paracompacto.
Los Ejemplos 1.18 y 1.19 son casos de variedades abstractas, no denidas como
subconjuntos de espacios eucldeos; en estos casos, se trata de espacios topologicos cocientes. Veamos pues los requisitos para que estos tengan las propiedades topologicas
exigidas a una variedad.
Sea X un espacio topologico y una relacion de equivalencia sobre X . Denotamos por X= el espacio topologico cociente con la topologa canonica (la que hace
continua a la proyeccionScanonicap : X ! X= ). Denotamos por [A] el saturado
fx 2 X x ag ). Veamos que condiciones debe cumplir
de A (es decir, [A] =
a2A
la relacion de equivalencia para que X= sea segundo contable y Hausdor:
Lema 1.28 Una relacion de equivalencia sobre X es abierta (i.e. [A] es abierto
para todo A X abierto) si y solo si la proyeccion canonica p : X ! X= es
una aplicacion abierta (i.e. la imagen de un abierto es un abierto). Cuando
es abierta y X tiene una base contable de conjuntos abiertos (i.e. X es
segundo contable), entonces tambien X= es segundo contable.
(3)
J.G. Hocking; G.S. Young .- Topologa. Editorial Reverte. Barcelona. (pag. 85)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.3 Propiedades topologicas de una variedad diferenciable
11
Demostracion.- Sea A X un subconjunto abierto. Ya que [A] = p 1(p(A)), si p
es abierta (p(A) es abierto) [A] es abierto, por la denicion de la topologa cociente.
Recprocamente, si [A] es abierto implica que p(A) es abierto, luego p es abierta.
Ahora supongamos que es abierta y X tiene una base contable de conjuntos
abiertos
U = fUi gi2I . Si W es un subconjunto abierto de X=S, entonces p 1 (W ) =
S U para
alguna subfamilia de U y W = p(p 1 (W )) = p(Uj ). Se concluye, al
j
j 2J
j 2J
ser p abierta, que fp(Ui )gi2I es una base de conjuntos abiertos para X= .
Lema 1.29 Sea una relacion de equivalencia abierta en un espacio topologico
X . Entonces R = f(x; y) x yg es un subconjunto cerrado del espacio
X X si y solo si el espacio topologico cociente X= es Hausdor.
Demostracion.- Supongamos que X= es Hausdor y que (x; y) 62 R, esto es,
x 6 y. Entonces existen entornos abiertos disjuntos U de p(x) y V de p(y). Sean
Ue = p 1(U ) y Ve = p 1 (V ), los cuales contienen a x y a y, respectivamente. Si el
conjunto abierto Ue Ve que contiene a (x; y) intersecta a R, entonces debe contener
al punto (x0 ; y0 ) tal que x0 y0 , esto es p(x0 ) = p(y0 ), lo que esta en contradiccion
de la suposicion de que U \ V = . Esta contradiccion demuestra que Ue Ve no
intersecta a R y, por tanto, R es cerrado.
Inversamente, supongamos que R es cerrado. Dado cualquier par de puntos
distintos p(x); p(y) en X= , existe un conjunto abierto de la forma Ue Ve que
contiene a (x; y) y sin puntos comunes con R. Se sigue que U = p(Ue ) y V = p(Ve )
son disjuntos. Por hipotesis y por el Lema 1.28 se sigue que U y V son abiertos.
As, X= es Hausdor.
Utilizando los Lemas 1.28 y 1.29 podemos establecer que el espacio topologico
subyacente de la variedad del Ejemplo 1.18 satisface el segundo axioma de numerabilidad y es separado:
Espacio proyectivo. Veamos primero que es segundo contable:
Segun el Lema 1.28, basta demostrar que la relacion de equivalencia en IRn+1
f0g, que dene Pn(IR), es abierta. Sea ' : IRn+1 f0g ! IRn+1 f0g, la aplicacion
denida por '(x) = x ( 2 IR f0g), es claramente un homeomorsmo
S con'inversa
(U ) es
' 1 = '1=, y si U IRn+1 f0g es un conjunto abierto, [U ] =
2IR f0g
abierto, pues '(U ) es un abierto.
Necesitamos aplicar el Lema 1.29 para probar que Pn (IRn) es Hausdor:
Sea la funcion
f : (IRn+1 f0g) (IRn+1 f0g) IRn+1 IRn+1 ! IR
X
f (x; y) = f (x1 ; : : : ; xn+1 ; y1; : : : ; yn+1) = (xi yj xj yi )2 :
i6=j
Entonces f es continua y
R = f(x; y) 2 (IRn+1 f0g) (IRn+1 f0g)x yg = f 1 (0)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
12
1 Variedades diferenciables. Subvariedades
es un subconjunto cerrado de (IRn+1 f0g) (IRn+1 f0g) y por consiguiente Pn(IR)
es Hausdor.
1.4 Funciones y aplicaciones diferenciables
Vamos a establecer el concepto de funcion diferenciable en una variedad M y el de
aplicaciones diferenciables entre variedades, para lo cual utilizaremos el lenguaje de
cartas locales y poder utilizar as el concepto de diferenciabilidad en IRn del Calculo.
Denicion 1.30 Sea M una variedad diferenciable. Una funcion f : M ! IR se
dice que es diferenciable (de clase C 1) si para toda carta (U; '), f ' 1 :
'(U ) ! IR es una funcion diferenciable de clase C 1.
Nota 1.31 La diferenciabilidad de f depende de la estructura diferenciable de M
y no de la eleccion de las cartas; pues si (U; ') y (V; ) son dos cartas de M con
U \ V 6= , f ' 1 es diferenciable si y solo si f 1 es diferenciable. Esto es
consecuencia del hecho de ser
f ' 1 = (f 1 ) ( ' 1 )
y de que ' 1 es siempre diferenciable por la propia denicion de variedad diferenciable.
Representaremos por F(M) el conjunto de todas las aplicaciones diferenciables
sobre M.
Para el estudio local es natural no solo considerar funciones f : M ! IR denidas en todo M sino tambien admitir funciones que esten denidas solamente en un
entorno de un punto de M:
Denicion 1.32 Sea x un punto de la variedad diferenciable M. Una funcion f se
dice que es diferenciable de clase C 1 en un entorno del punto x si su dominio
Df es abierto, x 2 Df y f 2 F(Df ), cuando en Df se considera la estructura
diferenciable inducida por la de M.
As pues, f es diferenciable en un entorno del punto x 2 Df , si para toda carta
(U; ') en M con x 2 U , la composicion f ' 1 : '(Df \ U ) ! IR es diferenciable de
clase C 1.
Denotaremos por F(x) el conjunto de las funciones diferenciables en el entorno
de x.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.4 Funciones y aplicaciones diferenciables
M:
13
Algebra de las funciones diferenciables en un entorno de un punto x de una variedad
Si f; g 2 F(x) y 2 IR, entonces f + g, fg y f , denidas por
(f + g)(y) = f (y)+ g(y)
(fg)(y) = f (y)g(y)
(f )(y) = f (y);
y 2 Df \ Dg
son funciones con dominio la interseccion de los dominios de f y de g y trivialmente
f + g; fg; f 2 F(x), puesto que para cada carta (U; '), con x 2 U , se tiene
(f + g ) ' 1 = (f ' 1 ) + ( g ' 1 );
(fg) ' 1 = (f ' 1)(g ' 1); (f ) ' 1 = (f ' 1):
Con estas operaciones el conjunto F(x) se convierte en un algebra.
As mismo, el conjunto de las funciones diferenciables sobre M, F(M), se dota de
una estructura de algebra.
Ejemplo 1.33 Sea (U; ') una carta en M, y sean (x1 ; : : : ; xn ) las n funciones
coorn
i
i
i
denadas de la carta; es decir, x = r '; i = 1; 2; : : : ; n, con r : IR ! IR las
proyecciones dadas por ri (a1 ; : : : ; an ) = ai, que son diferenciables. Entonces, cada
funcion coordenada xi 2 F(x); x 2 U . En efecto, basta tener en cuenta que, por la
propia denicion
xi ' 1 = ri ;
i = 1; 2; : : : ; n:
Denicion 1.34 Sean M1 y M2 dos variedades diferenciables. Una aplicacion F :
M1 ! M2 se dice que es diferenciable (de clase C 1) si para todo x 2 M1
existe una carta (U1; '1 ) alrededor de x y una carta (U2 ; '2) alrededor de
F (x) con F (U1 ) U2 y tal que
'2 F '1 1 : '(U1) IRn1 ! IRn2
es diferenciable (Fig. 1.4).
Nota 1.35 De esta denicion se sigue que la aplicacion F es continua, pues nsi B
es un abierto de M2 que contiene
a F (x), '2(U2 \ B) es un abierto de IR 2 y
1
1
('2 F '1 ) '2(U2 \ B) es un abierto de IRn1 (n1 ; n2 dimensiones
de M1 y M2,
respectivamente), luego A = '1 1 ('2 F '1 1) 1 '2(U2 \ B) es un abierto de
M1 y se verica F (A) B; es decir, F es continua.
Si imponemos de antemano que la aplicacion F : M1 ! M2 sea continua, siempre
se puede lograr la condicion de la denicion: F (U1 ) U2.
Ademas, es claro que la denicion dada no depende de las cartas tomadas.
Veamos ahora una caracterizacion equivalente de aplicacion diferenciable entre
variedades:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
14
1 Variedades diferenciables. Subvariedades
M1
M2
U2
F(U1)
U1
F
IRn 1
ϕ1
IRn
ϕ1(U1 )
ϕ2
2
ϕ2 F ϕ1-1
ϕ2(U2 )
Fig. 1.4: Aplicaciones diferenciables
Proposicion 1.36 Sean M1 y M2 dos variedades diferenciables y F : M1 ! M2
una aplicacion continua, entonces F es diferenciable si y solo si para toda
funcion diferenciable f : W M2 ! IR, W abierto, f F es diferenciable en
F 1 (W ):
Demostracion.- Sean x 2 M1, W un abierto de M2 que contiene a F (x) y una
funcion f 2 F(W ), demostremos que f F 2 F(x).
Si (U1 ; '1) y (U2; '2) son cartas alrededor de x y F (x), respectivamente, tales
que F (U1 ) U2 , entonces U1 \ F 1 (U2 ) es un entorno abierto de x. As, al ser F
diferenciable en x y f 2 F(F (x)), resulta que '2 F '1 1 es diferenciable en '1(x)
y f '2 1 es diferenciable en '2(F (x)). Luego
f F '1 1 = (f '2 1) ('2 F '1 1)
es diferenciable en '1(x); lo que quiere decir que f F es diferenciable en x.
Recprocamente, para probar que F es diferenciable, tenemos que establecer que
'2 F '1 1 es diferenciable, o, lo que es equivalente, que sus funciones componentes:
sj '2 F '1 1 = yj F '1 1
son diferenciables, donde sj : IRn2 ! IR y '2 = (y1 ; : : : ; yn2 ). Lo cual es cierto, pues
basta tomar f = yj ; (j = 1; : : : ; n2).
Denotamos por F(M1 ; M2) al conjunto de las aplicaciones diferenciables de M1
en M2.
Ejemplo 1.37
Si (U ; ') es una carta local en una variedad M y sea O = '(U ),
n
abierto en IR , entonces
' 2 F(U ; O ) y ' 1 2 F(O; U ):
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.5 Espacio tangente y cotangente. Aplicaciones inducidas
15
En efecto, si 1O : O ! O es la carta identidad en O , se tiene que
1O ' ' 1 = 1O y ' ' 1 1O1 = 1O :
Denicion 1.38 Dos variedades diferenciables M1 y M2 se dice que son difeomorfas
si existe una aplicacion diferenciable F : M1 ! M2 que admita inversa
F 1 : M2 ! M1 diferenciable. A una tal F se le denomina difeomorsmo.
Ejemplo 1.39 Si M1 y M2 son las variedades del Ejemplo 1.22, y F : M1 ! M2,
esta dada por x 7! F (x) = x1=3 , es un difeomorsmo. Sin embargo, G : M1 ! M2,
denida por x 7! G(x) = x, es diferenciable, pero su inversa no lo es.
Nota 1.40 Dos variedades difeomorfas son necesariamente homeomorfas. El pro-
blema estriba en saber si dos variedades diferenciables homeomorfas son difeomorfas.
Se demuestra que lo son si la dimension es 1, 2 o 3. En el caso general es preciso decir
que ello no es siempre posible, despues del descubrimiento de Milnor (4) de la existencia de 15 estructuras diferenciables no difeomorfas sobre la esfera S7, resultado
extendido a S9, S15 y S31.
1.5 Espacio tangente y cotangente. Aplicaciones inducidas
Un concepto de gran importancia en la teora local de las variedades diferenciables
es el de espacio tangente en un punto. Si imaginamos que la variedad esta inmersa
en el espacio eucldeo IRn, resulta intuitivo hacer corresponder a cada p 2 M un
cierto espacio vectorial: el espacio de los vectores tangentes a M en p; es decir,
los vectores tangentes
a las curvas sobre M que pasan por p. As, en la esfera
S2 = f~x 2 IR3 k~xk = 1g inmersa en IR3, el plano tangente en un punto p (Ejercicio 17
o Corolario
1.81) es el conjunto de vectores ortogonales al vector posicion ~p, es decir,
f~v 2 IR3~v ~p = 0g
Como, en general, tal inmersion no viene dada canonicamente, hemos de describir
el espacio tangente mediante propiedades intrnsecas de la variedad. Esto es, recurrir
a las cartas que forman el atlas que describe su estructura diferenciable. As, y
volviendo al caso de supercies en IR3 , un vector tangente ~v a una supercie M en
un punto p contenido en la imagen de una representacion parametrica local
~x : A IR2 ! M IR3
viene dado por
(4)
405.
(u1; u2) 7! ~x(u1 ; u2)
@~x + v2 @~x
~v = v1 @u
1
@u2
J. Milnor.- On manifolds homeomorphic to the 7{sphere. Ann. of Math., 64(1956), pag. 399{
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
16
1 Variedades diferenciables. Subvariedades
es decir, un vector esta determinado por un par de numeros reales (v1; v2 ), respecto a una representacion parametrica dada, que son sus componentes en la base
f@~x=@u1; @~x=@u2g.
De nuevo aqu, recurrimos a vectores tangentes en IR3 , pero estos se pueden
entender como una aplicacion que asigna a cada funcion diferenciable un numero
real determinado por el valor de la derivada direccional con respecto a ellos, en su
punto de aplicacion. Y a esta interpretacion de vector es a la que acudiremos en una
variedad.
Denicion 1.41 Un vector tangente a una variedad diferenciable M de dimension
n en un punto x 2 M, es una aplicacion
v : F(x) ! IR;
tal que jada una carta coordenada (U; ') en M con x 2 U , existe una
n upla (a1 ; : : : ; an ) de numeros reales tal que, para toda f 2 F(x):
n @ (f '
X
v(f ) = ai
@ri
i=1
1)
j'(x)
:
Observemos que si v : F(x) ! IR es una aplicacion que verica esta propiedad
relativamente a una carta coordenada (U; ') con x 2 U , la misma propiedad se
verica tambien para cualquier carta coordenada (V; ) con x 2 V ; es decir, existe
una n{upla (b1 ; : : : ; bn ) de numeros reales tal que, 8f 2 F(x),
n @ (f X
v(f ) = bj
j =1
@rj
1)
j(x)
:
En efecto, supongamos que v tiene a (a1 ; : : : ; an) como n{upla asociada a la carta
(U; '), entonces:
v (f ) =
(=)
=
=
n @ (f ' 1 )
n @ (f 1 ' 1 )
X
X
i
a @ri
= ai
=
i
@r
j
'
(
x
)
j
'
(
x
)
i=1 0
i=1
1
n @ (f 1 )
n
j
1
X
X
@ (r ' ) A =
ai @
j
@ri
j(x)
j'(x)
i=1 0j =1 @r
1
n @ (f 1 )
n
X
X
j ( ' 1 )
ai @
J
j'(x) A =
i
j
@r
j
(
x
)
j =1
i=1
n
n
n @ (f X X i j 1 ! @ (f 1 )
X
j
j =1 1=1
a Ji ( ' )j'(x)
@rj
j(x)
=
j =1
b
donde Jij ( ' 1) es la matriz jacobiana de la aplicacion ' 1.
@rj
1)
j(x)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.5 Espacio tangente y cotangente. Aplicaciones inducidas
Por tanto
donde
n @ (f X
v(f ) = bj
j =1
bj =
n
X
i=1
@rj
1)
j(x)
17
:
ai Jij ( ' 1)j'(x):
En consecuencia, esto signica que, para que una aplicacion v : F(x) ! IR sea
un vector tangente en x 2 M, basta con que verique la condicion exigida en la
denicion con respecto a una carta coordenada (U; ') para que automaticamente la
satisfaga para todas las cartas coordenadas.
Para un punto x 2 M, representamos por Tx(M) el conjunto de los vectores
tangentes a M en x, al que llamaremos espacio tangente a la variedad M en x.
Sea ahora (U; ') una carta coordenada con x 2 U , y sean (x1 ; : : : ; xn ) las funciones coordenadas de esta carta. Para cada i = 1; 2; : : : ; n, denimos:
@ (f ) = @ (f ' 1) ; 8f 2 F(x)
@ : F(x) ! IR
por
@xi
@xi
@ri j'(x)
y observemos que @x@ i 2 Tx(M) trivialmente, puesto que la n{upla de numeros reales
que le corresponde, relativamente a la carta (U; '), es (0; : : : ; 1; : : : ; 0), con el 1 en
el i{esimo lugar.
Proposicion 1.42 Sea M una variedad diferenciable de dimension n. El espacio
tangente Tx(M) en un punto x es un espacio vectorial sobre el cuerpo de los
numeros reales IR de dimension n. Si (U; ') es una carta coordenada con
x 2 U y (x1 ; : : : ; xn ) sus funciones coordenadas, f @x@ i ; : : : ; @x@n g constituye
una base de Tx (M), denominada base canonica o natural asociada a la carta
(U; ').
(*) Regla de la cadena:
Dada una funcion G : IRn ! IR de n variables, G(x) = G(x1 ; : : : ; xn ), y si cada
una de las variables es reemplazada por una funcion, xk = F k (z), de otra variable
z, m{dimensional, z = (z1 ; : : : ; zm ). La funcion compuesta H , as formada, es una
funcion de m variables z1 ; : : : ; zm , y la regla de la cadena, en este caso, consiste en
un conjunto de m formulas, una para cada derivada parcial D1 H; : : : ; Dm H , cuya
formula para Dr H (z) es
n
X
Dr H (z) = Dk G (F (z)) Dr F k (z)
k=1
( r = 1; : : : ; m ) :
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
18
1 Variedades diferenciables. Subvariedades
Demostracion.- De forma natural, a Tx(M) se le dota de una estructura de espacio
vectorial sobre el cuerpo de los numeros reales como sigue: si v; v1 ; v2 2 Tx (M) y
2 IR, denimos
v1 + v2 : F(x) ! IR
v : F(x) ! IR
(v1 + v2)(f ) = v1(f ) + v2 (f )
(v)(f ) = v(f ) 8f 2 F(x):
Para ver que v1 + v2; v 2 Tx(M), observemos que dada una carta coordenada
(U; ') con x 2 U , (a11 ; : : : ; an1 ), (a12 ; : : : ; an2 ) y (a1 ; : : : ; an ) las n{uplas de numeros
reales asociados a v1 , v2 y v respectivamente, entonces (a11 + a12 ; : : : ; an1 + an2 ) es
la n{upla asociada a v1 + v2 y (a1 ; : : : ; an ) es la n{upla asociada a v, ambas
relativamente a la carta (U; ').
Veamos ahora que f @x@ 1 ; : : : ; @x@n g constituyen un sistema generador de Tx(M).
Sea v 2 Tx(M); entonces, asociado a la carta (U; '), v determina una n{upla de
numeros reales (a1 ; : : : ; an ) de forma que, para f 2 F(x) arbitraria,
n @ (f '
X
v (f ) = a i
luego
i=1
@ri
1)
!
n
n
X
X
@
@
= ai @xi (f ) =
ai @xi (f );
j'(x)
i=1
i=1
n
X
v = ai @
i
i=1 @x
y, por tanto, f @x@ 1 ; : : : ; @x@n g generan Tx(M).
Veamos, nalmente, que son linealmente independientes. Para ello, supongamos
que tenemos una combinacion lineal
n
X
i @x@ i = 0;
i=1
si se la aplicamos a cada xj 2 F(x), tenemos
n
n
n
n
j 1
j
X
X
X
X
iij = j
0 = i @x@ i (xj ) = i @ (x @r'i )
= i @r
=
i
@r
j'(x) i=1
j'(x) i=1
i=1
i=1
luego j = 0; 8j 2 f1; 2; : : : ; ng.
Cambio de base de vectores tangentes canonicos en un punto x 2 M:
Sean (U; ') y (V; ) dos cartas alrededor de un punto x 2 M, (x1 ; : : : ; xn ) y
1
(y ; : : : ; yn) las respectivas funciones coordenadas y, nalmente, f @x@ 1 ; : : : ; @x@n g y
f @y@1 ; : : : ; @y@n g las correspondientes bases canonicas de Tx(M). Vamos a obtener la
matriz que expresa el cambio de una base a otra.
Para obtenerla, observemos que, 8f 2 F(x) y cada i = 1; 2; : : : ; n,
@ (f 1 ' 1 )
@ (f ) = @ (f ' 1 )
=
=
@xi
@ri j'(x)
@ri
j'(x)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.5 Espacio tangente y cotangente. Aplicaciones inducidas
=
n @ (f X
@rj
j =1
1)
19
@ (r j ' 1 )
@ri
j(x)
j'(x)
pero rj = yj , para j = 1; 2; : : : ; n, luego
n @ (y j ' 1 )
@ (f ) = X
@ (f 1 )
@xi
@ri j'(x) @rj j(x) =
j =1
0n
1
n @
X
X
@ (y j ) @ A (f );
= @xi (yj ) @y@ j (f ) = @ @x
i
@yj
j =1
j =1
y como f es arbitraria, se sigue
n @
@ =X
j) @
(
y
i
i
@x j=1 @x
@yj
lo que signica que @x@ i (yj ) es la matriz cuadrada de orden n que da el cambio
de base correspondiente a un cambio de cartas. Conviene observar, para claricar
las cosas, que se trata de una matriz numerica cuyos terminos estan dados por
@ (r j ' 1 ) ;
@ (y j ) = @ (y j ' 1 )
=
@xi
@ri j'(x)
@ri
j'(x)
se trata pues de la matriz jacobiana de la aplicacion ' 1 de cambio de coordenadas
valuada en el punto '(x).
Proposicion 1.43 Todo vector tangente v 2 Tx (M) satisface las siguientes propiedades, para f; g 2 F(x) y 2 IR arbitrarios:
1) v(f + g) = v(f ) + v(g)
2) v(f ) = v(f )
3) v(fg) = v(f )g(x) + f (x)v(g):
Demostracion.- Las tres propiedades se demuestran de forma analoga; centremonos, por tanto, en una de ellas, por ejemplo en la tercera.
Para ello, tomemos una carta (U; ') arbitraria con x 2 U y sea (a1 ; : : : ; an )
la n{upla de numeros reales que determina a v en este sistema de coordenadas.
Entonces
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
20
1 Variedades diferenciables. Subvariedades
v(fg) =
n @ (fg ) ' 1 X
ai
n @ (f '
X
= ai
1 )(g ' 1 )
=
i
i
@r
@r
j
'
(
x
)
j
'
(
x
)
i=1
i=1
n @ (f ' 1 )
X
' 1)
@
(
g
i
1
1
= a
i j'(x) (g ' )('(x)) + (f ' )('(x)) @ri j'(x) =
@r
i=1
n
n @ (f ' 1 )
X
X
1
i
g(x) + ai f (x) @ (g@r'i )
=
a @ri
=
j
'
(
x
)
j
'
(
x
)
i=1
i=1
!
!
n
n @ (g ' 1 )
1
X i @ (f ' )
X
a @ri
=
ai @ri
g(x) + f (x)
=
j
'
(
x
)
j
'
(
x
)
i=1
i=1
= v(f ) g(x) + f (x) v(g):
Es importante se~nalar que las propiedades 1), 2) y 3) de esta Proposicion caracterizan totalmente a los vectores tangentes en x 2 M, las cuales se resumen diciendo
que la aplicacion v : F(x) ! IR es una derivacion. Es decir, de forma equivalente a
la que hemos dado, se puede denir Tx(M) como el conjunto de las derivaciones
D(x) = fv : F(x) ! IR v es una derivacion g:
Para establecer esta equivalencia, observemos, en primer lugar, que D(x) es un
espacio vectorial sobre el cuerpo de los numeros reales con las operaciones
(v + w)(f ) = v(f ) + w(f ); (v)(f ) = v(f ) 8v; w 2 D(x) y 2 IR:
Para ver que Tx(M) y D(x) coinciden, necesitamos el siguiente lema:
Lema 1.44 Sea (U; ') un sistema coordenado alrededor de x0 2 M, con funciones coordenadas (x1 ; : : : ; xn ) y tal que xi (x0 ) = 0; i = 1; 2; : : : ; n y
'(U ) = B0n("). Entonces para toda funcion f 2 F(x0 ), existen n funciones
f1 ; : : : ; fn 2 F(x0 ), tal que
f (x) = f (x0 ) +
para x en un entorno de x0 .
n
X
i=1
xi (x)fi (x)
Demostracion.- Sea la funcion diferenciable F = f ' 1 : B0n(") IRn ! IR;
para (1 ; : : : ; n) 2 B0n("), ponemos
F ( 1 ; : : : ; n ) =
= F (1 ; : : : ; n) F (1 ; : : : ; n 1; 0) + F (1 ; : : : ; n 1; 0)
F (1 ; : : : ; n 2; 0; 0) + F (1 ; : : : ; n 2; 0; 0) + F (1 ; 0; : : : ; 0) + F (1 ; 0; : : : ; 0) F (0; : : : ; 0) + F (0; : : : ; 0) =
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.5 Espacio tangente y cotangente. Aplicaciones inducidas
=
21
n X
F (1 ; : : : ; i 1; ti ; 0; : : : ; 0) 10 + F (0; : : : ; 0) =
i=1
n Z 1 @F
X
1
i 1 i
i
i ( ; : : : ; ; t ; 0; : : : ; 0) dt =
@r
i=1 0
n
X
= F (0; : : : ; 0) + iFi (1 ; : : : ; n )
= F (0; : : : ; 0) +
i=1
R
@Fi ( 1 ; : : : ; i 1 ; t i ; 0; : : : ; 0) dt es
donde las Fi, denidas por Fi (1; : : : ; n) = 01 @r
diferenciable. Poniendo fi = Fi ', para i = 1; 2; : : : ; n, queda probado el lema.
Proposicion 1.45 Existe un isomorsmo entre los vectores tangentes en x0 a M y
el conjunto de las derivaciones D(x0 ).
Demostracion.- Todo vector tangente v 2 Tx0 (M) verica las propiedades de la
Proposicion 1.43, luego es un elemento de D(x0 ). En particular los elementos de la
base canonica f @x@ 1 ; : : : ; @x@n g D(x0 ).
Para establecer la otra inclusion, observemos en primer lugar que
v ( c) = 0
para
v 2 D(x0 ) y c 2 IR
pues v(c) = v(c1) = cv(1) = cv(1 1) = c(1v(1) + 1v(1)) = 2cv(1), as cv(1) = 0 y,
por tanto, v(c) = 0.
Tomemos ahora una carta local (U; ') de funciones coordenadas (x1 ; : : : ; xn )
alrededor de x0 , tal que (ver Nota 1.4) '(x0) = 0 y '(U ) = B0n("). Demostremos,
que para todo v 2 D(x0 ), se tiene:
v=
n
X
i=1
v(xi ) @x@ i :
En efecto, 8f 2 F(x0 ) se tiene, utilizando el lema anterior:
v (f ) = v
n
X
i
v(xi )fi (x0 ) + xi (x0 )v(fi ) =
f (x0 ) + x fi =
i=1
i=1
!
n
n
X
X
@f
@
= v(xi ) @xi (x0 ) =
v(xi ) @xi (f ):
i=1
i=1
n
X
Vamos a asociar a cada aplicacion diferenciable entre variedades una aplicacion
lineal entre sus espacios tangentes.
Sean M y N variedades diferenciables de dimensiones m y n, respectivamente, y
F : M ! N una aplicacion diferenciable. Dado un punto x 2 M, consideremos su
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
22
1 Variedades diferenciables. Subvariedades
punto imagen F (x) 2 N, y los espacios tangentes Tx(M) y TF (x)(N). Para v 2 Tx(M),
vector tangente en el punto x 2 M, denimos
F (v): F F (x) ! IR
como la aplicacion dada por
[F(v)](h) = v(h F );
8h 2 F F (x)
Observemos que esta aplicacion esta bien denida, puesto que h F 2 F(x), al
ser h y F diferenciables.
Proposicion 1.46 Para cada v 2 Tx(M), F (v) 2 TF (x)(N) y la aplicacion
F : Tx(M) ! TF (x)(N) v 7! F (v)
es lineal (i.e. homomorsmo entre espacios vectoriales).
Demostracion.- Para ver que F (v) 2 TF (x)(N) tendremos que probar que si (V; )
es una carta local en N, con F (x) 2 V , existe una n{upla (b1 ; : : : ; bn ) de numeros
reales de forma que
n @ (h 1 )
X
[F (v)](h) = bj @sj
8h 2 F(F (x))
j(F (x))
j =1
donde sj : IRn ! IR es la j {esima proyeccion.
Para ello, consideremos una carta local arbitraria (U; ') en M con x 2 U , y sea
(a1 ; : : : ; am ) la m{upla de numeros reales tales que
m @ (f '
X
v (f ) = a i
@ri
i=1
1)
8f 2 F(x)
j'(x)
donde ri : IRm ! IR es la i{esima proyeccion.
Recordemos que, si (x1 ; : : : ; xm ) y (y1 ; : : : ; yn) son nlas funciones coordenadas
de
o
las cartas (U; ') y (V; ), entonces @x@ 1 ; : : : ; @x@m y @y@ 1 ; : : : ; @y@n son bases de
Tx(M) y TF (x)(N) respectivamente. Se deduce, para h 2 F(F (x)), que:
[F (v)](h) = v(h F ) =
=
m
m
X
X
F '
ai @x@ i (h F ) = ai @ (h @r
i
i=1
m @ (h 1 F '
X
ai
i=1
@ri
1)
i=1
j'(x)
1)
j'(x)
=
=
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.5 Espacio tangente y cotangente. Aplicaciones inducidas
=
=
0n
m
X X
ai @ @ (h j
i=1
n
X
j =1
1)
@s
23
1
@ (sj F ' 1 ) A =
@ri
j(F (x))
j'(x)
m @ (y j F '
X
ai
1)
@ri
j =1 i=1
n @ (h 1 )
X
bj @sj
=
:
j(F (x))
j =1
!
@ (h 1 )
@sj j(F (x)) =
j'(x)
Por tanto, F (v) 2 TF (x)(N).
Como h es arbitraria, de aqu se sigue
n
X
F (v) = bj @
con
bj = v(yj F ); (j = 1; 2; : : : ; n):
j
@y
j =1
Ademas, estas mismas expresiones nos permiten deducir que F es un homomorsmo entre espacios vectoriales y deducir cual es la matriz de numeros
o
n @ reales@que
@
@
tiene asociada con respecto a las bases canonicas @x1 ; : : : ; @xm y @y1 ; : : : ; @yn .
En efecto
n @
X
@
F( @xi ) = @xi (yj F ) @y@ j
j =1
de lo que se sigue que F es lineal, y esta determinada por la matriz de coecientes:
@ (yj F ) = @ (sj F ' 1)
(F )ji = @x
i
@ri
j'(x)
i 2 f1; 2; : : : ; mg j 2 f1; 2; : : : ; ng
es decir, que F esta representada por la matriz jacobiana, de m columnas y n las,
en el punto '(x), de la aplicacion F ' 1.
Denicion 1.47 A la aplicacion lineal F : Tx(M) ! TF (x)(N), inducida por la
aplicacion diferenciable F : M ! N, entre los espacios tangentes en puntos correspondientes, le llamamos aplicacion lineal tangente de F , aplicacion
inducida por F o tambien diferencial de F .
Nota 1.48 Si hubiera necesidad de ello, para evitar confusiones, escribiremos F (x),
para indicar el punto de partida. Se suele tambien representar F por dF ; sin embargo, no la utilizaremos y reservaremos la d para una situacion particular (funciones
diferenciables), por una parte, y para el operador diferencial exterior (Teorema 2.53).
Proposicion 1.49 Sean F : M ! N y G : N ! P aplicaciones diferenciables entre
variedades. Entonces
(G F ) = G F :
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
24
1 Variedades diferenciables. Subvariedades
Demostracion.- Para un punto x 2 M se tienen las aplicaciones inducidas:
Tx(M)
F
-
TF (x)(N) G
(G F )
-
TG(F (x))(P)
6
Sean v 2 Tx(M) y h 2 F G(F (x)) arbitrarios, entonces:
[(G F ) (v)](h) = v h (G F ) = v (h G) F =
= [F (v)](h G) = [G F (v) ](h) = [(G F)(v)](h)
y como v y h son arbitrarios se sigue: G F = (G F ) .
Ejemplo 1.50 Sea M una variedad diferenciable y U M un conjunto abierto.
Entonces U tiene una estructura de variedad diferenciable, la inducida por la de M
(Ejemplo 1.14), y la inclusion i : U ! M es una aplicacion diferenciable. Ademas,
8f 2 F(M); fjU 2 F(U ). Por ultimo,
i : Tx(U ) ! Tx(M);
8x 2 U
es un isomorsmo, con lo que podemos identicar estos espacios tangentes.
Nota 1.51 Curvas sobre una variedad:
Consideraremos las curvas como un caso particular de aplicaciones entre variedades, pues trataremos con curvas parametrizadas.
Una curva en una variedad M es una aplicacion diferenciable de un intervalo
abierto de IR en M. A menudo hableremos de una curva
: [a; b] IR ! M;
donde [a; b] es un intervalo cerrado de IR, y en este caso suponemos que admite
una extension diferenciable a un abierto de IR que contiene al intervalo [a; b].
Sea : I ! M, con I IR un intervalo, una curva diferenciable sobre M. Para
cada t 2 I , el vector tangente a la curva en el punto (t) es, por denicion
d _ (t) = dr 2 T(t)(M);
jt
donde drd es el vector basico asociado a la coordenada r de IR.
Si (x1 ; : : : ; xn ) es un sistema de coordenadas locales alrededor del punto (t),
entonces
n
i
X
_ (t) = d(xdr ) @x@ i :
i=1
jt
j (t)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.5 Espacio tangente y cotangente. Aplicaciones inducidas
25
Habiendo denido los conceptos de curva y de vector tangente, podemos ahora
dar una interpretacion geometrica de la aplicacion F inducida por la aplicacion
diferenciable entre variedades F : M ! N.
Si v 2 Tx(M) tomemos una curva sobre M tal que (0) = x y _ (0) = v; entonces
F es una curva en N, vericandose (F )(0) = F (x) y tambien F _ (0) = F (v).
Observemos que tal curva existe, sin mas que considerar una carta (U; ')
alrededor de x 2 M y tomar, por ejemplo, la imagen mediante ' 1 de un segmento
de la recta en IRn que pasa por '(x) y tiene la direccion del vector '(v). Tambien
observemos que la obtencion del vector F (v), no depende de la curva elegida con
tal que pase por x y sea tangente a v.
As pues, para hallar la imagen de un vector v 2 Tx(M), trazamos una curva a la
que el vector v es tangente, hallamos su imagen en N y tomamos el vector tangente
en esta curva, obteniendose el vector F (v).
Denicion 1.52 Denominamos espacio cotangente en el punto x de la variedad
diferenciable M al espacio vectorial real Tx (M) dual del espacio tangente
Tx(M) en x.
Un elemento ! 2 Tx (M) es, por denicion, una aplicacion lineal ! : Tx(M) ! IR,
al cual denominaremos, indistintamente, vector cotangente, covector o 1{forma en el
punto x.
Si U; (x1 ; : : : ; xn ) es una carta local con x 2 U , la base canonica @x@ 1 ; : : : ; @x@n
de Tx(M) nos permite denir por dualidad una base natural en el espacio cotangente
Tx (M) cuyos elementos los representamos por fdx1 ; : : : ; dxn g y que estan denidos
por
@
i
dx @xj = ji
donde ji son los deltas de Kronecker: ji = 0; si i 6= j ; ji = 1; si i = j:
Veamos ahora que la aplicacion lineal tangente de una funcion real se puede
considerar como un elemento del espacio cotangente:
Sea f 2 F(M) y x 2 M, entones f induce, de forma natural, una aplicacion lineal
f : Tx (M) ! Tf (x)(IR)
y, si se considera el isomorsmo natural,
f (x) : Tf (x)(IR) ! IR
dado por
drd 7! ;
siendo r : IR ! IR la funcion coordenada en IR. Obtenemos la aplicacion
df = f (x) f : Tx(M) ! IR.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
26
1 Variedades diferenciables. Subvariedades
Veamos como esta denida df ; para ello, si v 2 Tx(M), ponemos f (v) = drd , as
d
=
df (v) = (f (x) f )(v) = f (x) dr
y tan solo nos queda por determinar este numero real :
d
= dr (r) = f (v) (r) = v(r f ) = v(f )
por tanto,
df (v) = v(f )
8v 2 Tx(M)
Como consecuencia de esta relacion, se tienen las siguientes propiedades, para
v; v0 2 Tx(M) y a 2 IR:
df (v + v0 ) = (v + v0 )(f ) = v(f ) + v0 (f ) = df (v) + df (v0 )
df (av) = (av)(f ) = a(v(f )) = a df (v)
y, por tanto, df 2 Tx (M).
Denicion 1.53 Para cada f 2 F(x), el elemento df 2 Tx(M), denido por df (v) =
v(f ); 8v 2 Tx(M), se denomina diferencial de la funcion f en el punto x 2 M.
Nota 1.54 Observese que, en el caso particular de M = IRn, df es la diferencial
ordinaria. Ademas, queda justicada la notacion para los elementos de la base dual
fdx1 ; : : : ; dxn g de Tx (M), asociada a una carta local (U; (x1 ; : : : ; xn )), pues de hecho,
como xi : U ! IR, dxi es la diferencial de xi .
Si f 2 F(x), x 2 U , entonces
n @
X
df = @xi (f ) dxi :
i=1
V; (y1 ; : : : ; yn ) es otra carta coordenada alrededor del punto
En particular, si
x, entonces la relacion entre las bases naturales fdx1; : : : ; dxn g y fdy1; : : : ; dyng en
Tx (M) se expresa por
dyj =
n @
X
j i
@xi (y )dx
i=1
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.5 Espacio tangente y cotangente. Aplicaciones inducidas
27
As como una aplicacion diferenciable entre variedades F : M ! N induce una
aplicacion lineal entre los espacios tangentes, veamos que ella tambien induce una
aplicacion lineal entre los espacios cotangentes en puntos correspondientes. Para ello
solo tenemos que considerar la aplicacion traspuesta de F .
Sean Tx (M) y TF (x)(N) los espacios contangente en x 2 M y en su punto imagen
F (x) 2 N. Para ! 2 TF (x)(N), 1{forma en el punto F (x) 2 N, denimos
F (!): Tx(M) ! IR
como la aplicacion dada por
[F (!)](v) = ! F (v) ;
8v 2 Tx (M)
Denicion 1.55 Si F : M ! N es una aplicacion diferenciable, x 2 M, un punto
de M, y ! 2 TF (x)(N), a la 1{forma F (!) 2 Tx (M) se le domina imagen
recproca de ! por F .
Proposicion 1.56 Sean F : M ! N y G : N ! P aplicaciones diferenciables entre
variedades. Entonces
(G F ) = F G :
Demostracion.- Para un punto x 2 M se tienen las aplicaciones inducidas entre
los espacios cotangentes:
G
TG (F (x))(P)
-
F
TF (x)(N)
(G F )
Tx (M)
6
Sean ! 2 TG (F (x))(P) y v 2 Tx(M) arbitrarios, entonces:
-
[(G F ) (!)](v) = ! (G F ) (v) = ! G F (v) =
= [G (!)] F (v) = F [G (!)] (v)
y como v y ! son arbitrarios se sigue: F G = (G F ) .
Nota 1.57 Si x 2 M, F : M ! N aplicacion diferenciable y f : N ! IR funcion
diferenciable, como df 2 TF (x)(N), se tiene
F (df ) = d(f F );
pues, [F (df )](v) = df F (v) = [F (v)](f ) = v(f F ) = d(f F )(v), 8v 2 Tx(M).
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
28
1 Variedades diferenciables. Subvariedades
En particular, si (V; (y1 ; : : : ; yn)) es una carta coordenada alrededor de F (x)
m @
X
j
j
F (dy ) = d(y F ) = @xi (yj F ) dxi ;
8j 2 f1; 2; : : : ; ng:
i=1
Esto nos permite calcular los terminos de la matriz asociada la aplicacion lineal
F : TF (x)(N) ! Tx (M) respecto a los sistemas coordenados (U; ' = (x1 ; : : : ; xm )),
(V; = (y1 ; : : : ; yn )) alrededor de x 2 M y F (x) 2 N, respectivamente:
(F )ji = @x@ i (yj F ) = @r@ i (yj F ' 1) = @r@ i (sj F ' 1 );
Se trata de una matriz de n columnas y m las, que es la traspuesta de la matriz
asociada a F , respecto de estos mismos sistemas de coordenadas.
1.6 Rango de una aplicacion diferenciable
Sea F : N ! M una aplicacion diferenciable entre variedades diferenciables de
dimensiones n y m, respectivamente, y sea x 2 N. Si (U; ') y (V; ) son sistemas
coordenados locales alrededor de x y de F (x), respectivamente, tales que F (U ) V ,
entonces tenemos la correspondiente expresion de F en coordenadas locales:
Fb = F ' 1 : '(U ) ! (V )
(1 ; : : : ; n) 7 ! Fb(1 ; : : : ; n) = F 1(1 ; : : : ; n ); : : : ; F m (1 ; : : : ; n) :
Denicion 1.58 El rango de F en x es el rango de la matriz jacobiana de Fb en
'(x).
As, el rango de F en x es es el rango en '(x) de la matriz
0 @F 1
1 1
@F
B
B @r1 @rn C
C
B
B
B
@ @F m
C
C
C
@F m A
@r1
@rn '(x)
Esta denicion debe ser independiente de la eleccion de las coordenadas. Para
lo cual basta observar que la matriz anterior es la asociada a la aplicacion lineal
inducida entre los espacios tangentes Tx (N) en x a N y TF (x)(M) en F (x) a M,
relativamente a las cartas (U; ') y (V; ):
F : Tx (N) ! TF (x)(M)
pues, F j = sj F ' 1, para j = 1; : : : ; m. As, podemos dar la siguiente
denicion equivalente:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.6 Rango de una aplicacion diferenciable
U
29
V’
.x
. F(x)
U’
V
F
φ’
ϕ’
IRm
IRn
ϕ’(U’ )
A
ϕ
B
φ’ F ϕ’
φ ’(V’)
φ
-1
H
G
IRm-k
IRn
φ F ϕ -1
C (ε)
n
0
C (ε)
IRk
m
0
Fig. 1.5: Teorema del rango
Denicion 1.59 Se llama rango de F en x al rango de la aplicacion lineal inducida
F : Tx(N) ! TF (x)(M).
Proposicion 1.60 (Teorema del rango) Sea F : N ! M una aplicacion diferenciable entre variedades de dimensiones n y m, respectivamente, y supongamos que rango F = k en todo punto de N. Si x 2 N, entonces existen
sistemas coordenados (U; ') y (V; ) alrededor de x y de F (x) tales que
'(x) = 0 2 IRn ; '(U ) = C0n(") y (F (x)) = 0 2 IRm ; (V ) = C0m(") y la
expresion de F en coordenadas, Fb = F ' 1, esta dada por
Fb(1 ; : : : ; n) = (1 ; : : : ; k ; 0; : : : ; 0):
Demostracion.- Sean (U 0 ; '0 ) una carta alrededor de x en N y (V 0 ; 0 ) una carta
alrededor del punto F (x) en M, vericandose F (U 0 ) V 0 , entonces la aplicacion
0 F '0 1 : '0 (U 0 ) IRn ! 0 (V 0 ) IRm
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
30
1 Variedades diferenciables. Subvariedades
es diferenciable y de rango constante igual a k en '0 (U 0 ), entonces existen (en virtud
del teorema del rango entre espacios eucldeos) conjuntos abiertos A '0 (U 0 ) y B 0 (V 0 ) con '0(x) 2 A y 0 (F (x)) 2 B, y existen difeomorsmos G : A ! C0n(") IRn
y H : B ! C0m(") IRm , vericando H (0 F '0 1 ) G 1 (C0n(")) C0m("), tal
que esta aplicacion se expresa en la forma simple
H (0 F '0 1) G 1 (1 ; : : : ; n ) = (1; : : : ; k ; 0; : : : ; 0):
Consideremos ahora las cartas
(U; ') '0 1(A); G '0j'0 1(A) alrededor de x;
(V; ) con lo que
0 1(B); H 0j0 1(B)
alrededor de F (x);
F ' 1 : '(U ) = C0n(") ! (V ) = C0m("); (1 ; : : : ; n) 7 ! (1 ; : : : ; k ; 0; : : : ; 0):
(ver Fig. 1.5)
1.7 Subvariedades inmersas y embebidas o regulares
En esta seccion discutiremos varios tipos de subvariedades de una variedad diferenciable. Este termino es usado en mas de un sentido en la bibliografa; sin embargo,
todos coinciden en que una subvariedad N de una variedad diferenciable M es un
subconjunto que a su vez es una variedad diferenciable. La confusion surge de que si
debera o no requerirse que fuera un subespacio topologico de M, esto es, que tenga
la topologa relativa. Adoptaremos la denicion mas usual, a saber, una subvariedad
diferenciable es la imagen N = F (N0 ) en M de una aplicacion F : N0 ! M inyectiva
y tal que rango F = dim N0 , N con la topologa y estructura diferenciable que hace
a F : N0 ! N un difeomorsmo. Nos referiremos a N en este caso como subvariedad
inmersa. Como demuestran los Ejemplos 1.68 y 1.69, la estructura diferenciable de
N puede tener una oscura y complicada relacion con la de M. Una nocion mas natural que desarrollaremos, es la de subvariedad regular, que como su nombre indica,
sera un caso especial del anterior. Es mas natural ya que su topologa y estructura
diferenciable se derivan directamente de la de M. Pasamos a exponer con detalle
estos conceptos.
Denicion 1.61 Decimos que una aplicacion diferenciable F : N ! M es una
inmersion de N en M si el rango F = dim N en todo punto; es decir, si F (x)
es inyectiva para todo x 2 N . Y se dice que F es submersion de N en M si
el rango F = dim M en todo punto; es decir, si F(x) es sobreyectiva para
todo x 2 N.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.7 Subvariedades inmersas y embebidas o regulares
31
Denicion 1.62 Si F : N ! M es una inmersion inyectiva, entonces decimos que la
imagen F (N), dotada de la estructura diferenciable que hace a F : N ! F (N)
un difeomorsmo, es una subvariedad (o subvariedad inmersa) de M.
F es un embebimiento si es una inmersion inyectiva que ademas es homeomorsmo de N sobre su imagen F (N), con la topologa como subespacio
de M. La imagen de un embebimiento se llama subvariedad embebida.
Nota 1.63 Tambien se suele decir, para indicar que F (N) es una subvariedad, que
el par (N; F ) es una subvariedad de M. Cabe entonces, establecer una relacion entre
pares que denan una misma subvariedad: Dos subvariedades (N1 ; F1 ) y (N2 ; F2 )
de M se dice que son equivalentes si existe un difeomorsmo : N1 ! N2 tal que
F1 = F2 .
F1 M
N1
PP
6
PP
PP
q
P
F2
N2
Esta es una relacion de equivalencia en el conjunto de todas las subvariedades de
M. Cada clase de equivalencia tiene un unico representante de la forma (A; i) donde A
es un subconjunto de M con la estructura de variedad tal que la aplicacion inclusion
i : A ,! M es una inmersion. As, si (N; F ) es un representante de la clase, entonces
el subconjunto A de M debe ser F (N). Se induce una estructura de variedad en A
exigiendo que F : N ! A sea un difeomorsmo. Con esta estructura de variedad,
(A; i) es una subvariedad de M equivalente a (N; F ), y es la unica estructura de
variedad sobre A con la propiedad de que (A; i) es equivalente a (N; F ).
Veamos una serie de ejemplos que ilustren las deniciones dadas; en todos ellos
las variedades M y N seran espacios eucldeos o abiertos en ellos, con coordenadas
cartesianas; salvo en los Ejemplos 1.66 y 1.67 donde es mas comodo, para efectuar
los calculos, considerar en IR2 coordenadas polares.
Ejemplo 1.64 La aplicacion F : IR ! IR3 , dada por F (t) = (cos t; sen t; t), es
inyectiva y tiene rango constante igual a 1 en todo t 2 IR. Por consiguiente, su
imagen F (IR), una helice circular con eje el OZ , es una subvariedad de IR3 . Ademas
F es un homeomorsmo sobre su imagen, considerando en esta la topologa inducida
por la de IR3, por lo que F es un embebimiento y F (IR) es una subvariedad embebida.
Fig. 1.6.
Ejemplo 1.65 Sea F : IR ! IR2 denida por F (t) = (cos t; sen t). Se trata de una
aplicacion de rango igual a 1 para todo t 2 IR. Sin embargo no es inyectiva, ya que
los puntos t = 2k + t0 tienen la misma imagen para cualquier entero k. Se trata de
una inmersion, pero el par (IR; F ) que describe la circunferencia unidad S1 en IR2
no representa una subvariedad. Fig. 1.7.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
32
1 Variedades diferenciables. Subvariedades
(a)
IR3
(b)
IR2
S1
Fig. 1.6: Helice
Fig. 1.7: Circunferencia
Ejemplo 1.66 Denimos F :]1; 1[! IR2 por
1
Fig. 1.8: Espirales
F (t) = t cos 2t; 1t sen 2t :
La imagen F (]1; 1[) es la curva espiral que tiende a (0; 0) cuando t ! 1, y a (1; 0)
cuando t ! 1. Claramente F es inmersion (como se observa utilizando coordenadas
polares), inyectiva y homeomorsmo sobre su imagen, esta con la topologa inducida
por IR2. Se trata pues de una subvariedad embebida. Fig. 1.8 (a).
Ejemplo 1.67 Si denimos F :]1; 1[! IR2 como
t + 1
1 sen 2t :
F (t) = 2t cos 2t; t +
2t
La imagen de esta aplicacion describe, como en el Ejemplo 1.66, una espiral pero
en este caso se enrolla en el crculo de radio 12 y centro en (0; 0) cuando t ! 1
y tiende a (1; 0) cuando t ! 1. Como all, se trata de una subvariedad embebida.
Fig. 1.8 (b).
Ejemplo 1.68 La gura de \ocho" (conjunto de puntos de IR2, vericando x4
4x2 + 4y2 = 0) esta descrita por la imagen de la aplicacion
2
F : IR ! IR denida por F (t) = 2 cos t 2 ; sen 2 t 2 ;
que es recorrida innidad de veces con periodo igual a 2. Se trata de una inmersion
no inyectiva. No obstante, podemos hacer que dicha gura sea recorrida una sola
vez, estableciendo previamente una biyeccion de IR en el intervalo ]0; 2[, de la forma
siguiente:
Para t ! 1 y t ! +1, nos aproximamos al (0; 0) solo como lmite (ver
Fig. 1.9). La inmersion esta dada por un cambio de parametro: Sea g : IR ! IR una
aplicacion monotona creciente y diferenciable tal que
g(0) = t!lim1 g(t) = 0 t!lim
+1 g (t) = 2;
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.7 Subvariedades inmersas y embebidas o regulares
33
por ejemplo, podemos poner g(t) = + 2 arctag t.
Entonces G : IR ! IR2, dada por
G(t) = F g(t) = 2 cos g(t) 2 ; sen 2 g(t) 2
es ahora una inmersion inyectiva; por lo que (IR; G) representa la gura de \ocho"
como subvariedad inmersa en IR2. Sin embargo, sigue ocurriendo que G no es un
homeomorsmo sobre su imagen, ya que G 1 deja de ser continua en el punto G(0).
Fig. 1.9.
1
(1,0)
-1
Fig. 1.9: Figura de \ocho"
Fig. 1.10: Curva no conexa
Ejemplo 1.69 Consideremos la curva en el plano denida por la imagen de la aplicacion F : IR ! IR2 , dada por
8 (0; t + 2)
<
F (t) = : ~ (t)
( 1t ; sen t)
para
para
para
1<t 1
1t1
1t<1
siendo, ~ : [ 1; 1] ! IR2 una curva que enlaza diferenciablemente los otros dos
trozos. F (IR) es una subvariedad inmersa en IR2. F no es un embebimiento, puesto
que F 1 no es continua (basta tomar cualquier entorno de uno de sus puntos de la
forma (0; y), con 1 y 1). Fig. 1.10.
Nota 1.70 De los ejemplos previos podemos sacar las siguientes concluciones: Pri-
mera, no todas la inmersiones consideradas son inyectivas globalmente (Ejemplo
1.65, 1.68) aunque si son localmente inyectivas. Y segunda, una inmersion aunque
sea inyectiva no es en general un homeomorsmo sobre su imagen (considerada como
subespacio topologico del conjunto de llegada), Ejemplo 1.68, 1.69. No obstante,
localmente esto siempre es posible como se demuestra en la proposicion siguiente.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
34
1 Variedades diferenciables. Subvariedades
Proposicion 1.71 Sea F : N ! M una inmersion. Entonces todo x 2 N tiene un
entorno abierto U tal que FjU es un embebimiento de U en F (U ) M.
Demostracion.- De acuerdo con el Teorema del rango constante podemos escoger
sistemas coordenados cubicos centrados en el origen (U; ') y (V; ) alrededor de
x 2 N y de F (x) 2 M, respectivamente; esto es, tales que '(x) = 0 2 IRn; (F (x)) =
0 2 IRm , con '(U ) = C0n(") y (V ) = C0m("), (cubos con la misma longitud de lado
") y tal que la expresion de F en coordenadas locales, Fb = F ' 1, esta dada
por
Fb(1 ; : : : ; n) = (1 ; : : : ; n; 0; : : : ; 0):
N
M
U
.x
. F(x)
V
F(U)
F
φ
ϕ
IRm
ξn+1=0,...,ξm=0
IRn
F
C0m(ε)
C0n(ε)
Fig. 1.11: Inmersion ) Embebimiento local
Para ver que FjU es un homeomorsmo de U sobre F (U ) con la topologa relativa,
observemos en primer lugar que como F (U ) V y V es abierto en M, la topologa
de F (U ) como subespacio de M es la misma que como subespacio de V: As FjU es
un homeomorsmos, pues lo son las aplicaciones ' : U ! C0n("), : V ! C0m(") y
Fb de C0n(") sobre el subconjunto de C0m(") denido por
n+1 = 0; : : : ; m = 0:
Esta proposicion nos da la posibilidad de expresar localmente las subvariedades
embebidas mediante ciertas relaciones entre la coordenadas locales de la variedad
donde estan contenidas. Necesitamos para ello, dar previamente unas deniciones.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.7 Subvariedades inmersas y embebidas o regulares
35
Denicion 1.72 Llamamos placa en un sistema coordenado cubico (U; ') en una
variedad m{dimensional M al conjunto S U tal que
n
.
o
'(S ) = 2 C0m(") r+1 = cr+1; : : : ; m = cm :
Usando esta deninicion podemos reenunciar la proposicion anterior en la forma
siguiente:
Proposicion 1.73 Si F : N ! M una inmersion y x 2 N, existe un sistema coordenado cubico centrado en el origen (V; ) alrededor de F (x) 2 M y un entorno
abierto U de x, tal que FjU es inyectiva y F (U ) es una placa en (V; ).
Nota 1.74 Resaltemos que esta proposicion solo nos dice que existe un entorno U
de x tal que F (U ) es una placa del sistema de coordenadas. No obstante, si tenemos
una subvariedad (N; F ), no siempre F (N) \ V va a ser una placa, ni siquiera es union
de placas. Por ejemplo, consideremos el punto (0; 0) en la gura de \ocho". Sin
embargo, en el caso de ser (N; F ) una subvariedad embebida, se puede siempre elegir
un sistema de coordenadas (V; ) tal que F (N) \ V es una unica placa de V .
Profundicemos un poco mas en el estudio de las subvariedades que poseen esta
propiedad y su relacion con las variedades embebidas.
Denicion 1.75 Un subconjunto N de una variedad m{dimensional M, se dice
que tiene la propiedad de una n{subvariedad (1 n m) si para todo punto
x 2 N existe un sistema coordenado cubico centrado en el origen (V; )
sobre M alrededor de x, tal que
n
. n+1
(V \ N ) = 2 C0n(")
= 0; : : :
o
; m = 0
es decir, V \ N es una placa de (V; ).
A un sistema de coordenadas de este tipo se le denomina adaptado a N .
Proposicion 1.76 Sea N un subconjunto de una variedad m{dimensional M, que
tiene la propiedad de una n{subvariedad. Entonces N; con la topologa
relativa, es una variedad diferenciable de dimension n y ademas la inclusion
i : N ,! M es un embebimiento; i.e. (N; i) es una subvariedad embebida de
M.
Demostracion.- Por denicion, para todo punto x0 2 N
, existe un sistema coordenado cubico centrado en el origen V; = (x1 ; : : : ; xm ) sobre M alrededor de x0
tal que
xn+1(x) = 0; : : : ; xm (x) = 0; 8x 2 V \ N:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
36
1 Variedades diferenciables. Subvariedades
N
IRm-n
V
.x0
M
φ
V=V N
IRn
Fig. 1.12: Conjunto con la propiedad de n{subvariedad
Entonces Ve = V \ N es un abierto en N y e = jVe es un homeomorsmo sobre
C0n(") = (C0m(")) en IRn, para la topologa relativa, donde : IRm ! IRn (m n)
es la proyeccion sobre nlas n primeras
coordenadas.
.
o
e
e
e
e
e
El conjunto A = (V ; ) V = V \ N; = jVe ; (V; ) 2 A; A atlas de M
constituye un atlas que dene una estructura diferenciable en N ; pues:
1) Como los abiertos V recubren a M, los abiertos Ve = V \ N recubren a N .
2) Sean (Ve ; e) y (Ve 0 ; e0 ) dos cartas de Ae con Ve \ Ve 0 6= , correspondientes a las
cartas (V; ) y (V 0 ; 0) de A, entonces
e0 e 1 : (V \ V 0 \ N ) ! 0 (V \ V 0 \ N )
viene dada por la composicion de aplicaciones
0 1
(0 )1 ; :::; (0 )n ; 0; :::; 0 7! (0 )1 ; :::; (0 )n
(1 ; :::; n) 7! (1 ; :::; n; 0; :::; 0) 7 !
todas ellas diferenciables.
La aplicacion inclusion i : N ,! M es diferenciable con inducida inyectiva; esto
es i es una inmersion: En efecto, si x 2 N y (V; ) es un sistema coordenado en M
adaptado a N , resulta, si Ve = V \ N y e = ejVe
i
x2V M
x 2 Ve N
e
?
(1 ; : : : ; n) 2 C0n(")
-
?
(1 ; : : : ; n; 0; : : : ; 0) 2 C0m(")
por tanto, i e 1 es diferenciable y la matriz asociada a la aplicacion inducida i
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.7 Subvariedades inmersas y embebidas o regulares
es
0
B
B
B
B
n
B
B
B
B
@
37
1
n
}|
{
z
8 1 0 0 C
>
< 0 1 0 C
C
C
C
>
: 0 0 1 C
C
C
A
0
0 0
que tiene rango n.
Como la topologa de N es la relativa, la inclusion i : N ,! M es un homeomorsmo sobre su imagen i(N ) = N ; esto es, i es un embebimiento.
Denicion 1.77 Una subvariedad regular de dimension n de una variedad m{dimensional M (1 n m) es un subespacio topologico N con la propiedad
de n{subvariedad y con la estructura diferenciable que las correspondientes
cartas adaptadas determinan sobre N.
r
S
1
V
ϕ
P
1
θ0
r
φ
θ
r=r-1
θ=θ−θ0
θ
Fig. 1.13: S1: Subvariedad regular
Ejemplo 1.78 Veamos que la circunferencia unidad S1 = fx 2 IR2 kxk = 1g, que
con la parametrizacion del Ejemplo 1.65 es una inmersion locamente inyectiva, es
realmente una subvariedad regular (Fig.1.13). Sea x0 un punto arbitrario P de S1,
introduzcamos ' (; r) las coordenadas polares usuales en IR2, y si (0 ; 1) son las
coordenadas de P , cambiemos las coordenadas de tal forma que r es reemplazado
por r~ = r 1 y por ~ = 0. Entonces existen funciones coordenadas
: x 7! ~(x); r~(x)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
38
1 Variedades diferenciables. Subvariedades
denidas para x en un entorno V tal que j~j < " y jr~j < ", que denen un sistema
coordenado alrededor de P , teniendo P las coordenadas (0; 0) y el subconjunto
abierto V \ S1 de S1 corresponde a r~ = 0. Con lo que S1 es pues un subvariedad
regular.
Hemos denido tres clases de subvariedades en una variedad M { inmersa, embebida y regular. La primera de ellas, que usualmente llamaremos simplemente
subvariedad, fue denida como la imagen N = F (N0 ) mediante una inmersion inyectiva F de N0 en M. Ya que F : N0 ! N M, tomamos (como parte de la denicion)
sobre N la topologa y estructura diferenciable de N0 ; los conjuntos abiertos de N
son la imagen de conjuntos abiertos en N0 y las cartas de N, (U; ') son de la forma
U = F (U 0 ), ' = '0 F 1, donde (U 0 ; '0 ) es una carta en N0 . El hecho de que F sea
continua implica que la topologa de N obtenida por este camino es en general mas
na que la topologa relativa como subespacio de M, esto es, si V es un abierto de
M, entonces V \ N es un abierto de N, pero pueden existir abiertos de N que no sean
de esta forma.
Un embebimiento es un caso particular de inmersiones inyectivas, aquellas en
las que U 0 es un abierto de N0 si y solo si F (U 0 ) = V \ N para algun abierto V
de M, esto es, que la topologa de la subvariedad N = F (N0 ) es exactamente su
topologa relativa como subespacio de M. Un embebimiento es as un caso particular
de subvariedad (inmersa).
Finalmente si N M es una subvariedad regular, entonces es tambien una subvariedad embebida ya que la inclusion i : N ,! M es un embebimiento.
La siguiente proposicion demuestra que las subvariedades embebidas y las subvariedades regulares coinciden.
Proposicion 1.79 Sea F : N0 ! M un embebimiento de una variedad N0 de dimension n en una variedad M de dimension m, n m. Entonces N = F (N0 )
es una subvariedad regular difeomorfa a N0 con respecto a la aplicacion
F : N0 ! N.
Demostracion.- Sea y = F (x) 2 N (Fig. 1.14). De acuerdo con el Teorema
del rango existen entornos coordenados (U 0 ; '0 ) de x y (V~ ; ~) de y tal que '0(x) =
(0; : : : ; 0) 2 C0n(") = '0 (U 0 ), ~(y) = (0; : : : ; 0) 2 C0m(") = ~(V~ ), F (U 0 ) V~ y la
aplicacion FjU 0 esta dada en coordenadas locales por
Fb = ~ F ('0 ) 1 : (1 ; : : : ; n ) 7 ! (1 ; : : : ; n ; 0; : : : ; 0):
Si ocurre que F (U 0 ) = Ve \ N , entonces el sistema coordenado (Ve ; e) sera un
entorno adaptado a N, y la proposicion estara demostrada. Mas esto, en principio,
no ocurre, por lo que tratamos a continuacion, de obtener unos nuevos entornos
coordenados a partir de los dados de x e y que gocen de esta propiedad:
Como F es un embebimiento, F (U 0 ) es un abierto en la topologa relativa de N,
f \ N, donde W
f es un abierto de M. Tomenos W = W
f \ Ve ; as,
esto es, F (U 0 ) = W
m
e(W ) es un conjunto abierto de C0 (") conteniendo al origen y e(F (U 0 )) e(W )
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.7 Subvariedades inmersas y embebidas o regulares
39
N’
M
V=φ-1(Cm0 (δ))
U’
F
y=F(x)
x.
U=F-1(V)=
=(ϕ’)-1(C0n(δ))
N=F(N’)
W
W
F(U’)
ϕ=ϕ’IU
ϕ’
φ
IRm-n
IRn
0 δ
C0n(δ)
φ=φ IV
φ(W)
F
IRn
ϕ’(U’)=C0n(ε)
Cm0 (δ)
φ(F(U’))
Fig. 1.14: Subvariedad embebida =) Subvariedad regular
.
y e(F (U 0 )) 2 C0m(") n+1 = = m = 0 . Entonces podemos escoger un
entorno cubico sucientemente peque~no C0m() e(W ); y sea
V = (~) 1 (C0m());
= ~jV :
(V; ) es un entorno cubico centrado en y, para el cual F (U 0 ) \ V = V \ N;
y si tomamos U = ('0 ) 1 (C0n()) = F 1(V ), vemos que (U; '), con ' = '0jU es
un entorno coordenado cubico centrado en x y los pares (U; ') y (V; ) tienen la
propiedad necesaria, es decir F (U ) = V \ N.
Esto prueba que N goza de la propiedad de n-subvariedad y por tanto en virtud
del Proposicion 1.76 se trata de una subvariedad regular.
Ademas con esta estructura de variedad en N, F es un difeomorsmo de N0 sobre
N. Pues F : N0 ! N esta dada, en los sistemas coordenados (U; ') y (V \ N; ) en
N, por
Fb : (1 ; : : : ; n) 7! (1 ; : : : ; n )
y la aplicacion inversa Fb 1 tiene exactamente la misma expresion. Por tanto, ambas
son diferenciables.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
40
1 Variedades diferenciables. Subvariedades
M
N
x
V
. y0
-1
F (y0)=A
U
φ
ϕ
IRn-k
IRm-k
(ξ1,...,ξn)
IRk
C0n(ε)
F(U)
F
ϕ(AIU)
(ξ1,...,ξk,0,...,0)
φ F ϕ -1
IRk
φ(F(U))
Cm0 (ε)
Fig. 1.15: Ejemplo subvariedad embebida
Un metodo para encontrar subvariedades esta dado por el siguiente resultado y
su corolario:
Proposicion 1.80 Sea N una variedad diferenciable n{dimensional, M una variedad m{dimensional y F : N ! M una aplicacion diferenciable. Supongamos
que F tiene rango constante igual a k sobre N y que y0 2 F (N). Entonces
F 1 (y0 ) es una subvariedad regular de N de dimension n k.
Demostracion.- Sea A = F 1 (y0 ) (Fig. 1.15). Demostremos que A tiene la
propiedad de una (n k){subvariedad. Sea x 2 A, ya que F tiene rango constante
igual a k (sobre un entorno de x), por el Teorema del rango podemos encontrar
entornos coordenados (U; ') y (V; ) de x e y0 , respectivamente, tales que '(x) y
(y0 ) son el origen en IRn y IRm , '(U ) = C0n("), (V ) = C0m(") y en coordenadas
locales FjU esta dada por la aplicacion
( F ' 1)(1 ; : : : ; n) = Fb(1 ; : : : ; n ) = (1 ; : : : ; k ; 0; : : : ; 0):
Esto signica que los puntos de U que se aplican en y0 son aquellos con las k
primeras coordenadas nulas, esto es,
.
A \ U = ' 1 Fb 1(0) = ' 1 2 C0n(") 1 = = k = 0 :
Y as A es una subvariedad regular de dimension n k ya que tiene la propiedad
de subvariedad.
El siguiente Colorario tiene gran importancia a la hora de dar ejemplos de subvariedades:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.7 Subvariedades inmersas y embebidas o regulares
41
Corolario 1.81 Si F : N ! M es una aplicacion diferenciable entre variedades,
dim N = n m = dim M, y rango de F es igual a m (F sobre) en todo
punto de A = F 1(y0 ), y0 2 F (N), entonces A es una subvariedad regular
de N. El subespacio de Tx (N) tangente a la subvariedad A en x es el nucleo
de F .
Demostracion.- F tiene en A el maximo rango posible, es decir m. Por el lema
siguiente, fx 2 N rango F = mg es un abierto; luego A = F 1 (y0 ) esta contenido
en un abierto en el que tambien F tiene rango m. Pero tal subconjunto abierto es
as mismo una variedad de dimension n, y podemos aplicar la proposicion anterior,
para demostrar que A es una subvariedad regular de N de dimension n m.
Si i : A ,! N es la inclusion natural, la aplicacion F i es constante y, por tanto,
su aplicacion inducida F i es identicamente nula. En consecuencia,
i (Tx(A)) F 1 jx (0):
Y como estos subespacios vectoriales tienen la misma dimension deben coincidir.
Lema 1.82 Sean N y M variedades diferenciables y F : N ! M aplicacion diferenciable, entonces
n
.
Ok = x 2 N (rango F )x k
o
es un abierto de N.
Demostracion.- En efecto, sea x0 2 Ok y (U; ') y (V; ) cartas denidas alrededor
de x0 y F (x0 ) respectivamente.
8x. 2 U , (rango Fo)x = (rango( F ' 1))'(x).
n
Demostraremos que = 2 '(U ) (rango Fb) k es un abierto; con lo que, al
tenerse ' 1(
) Ok , resulta que Ok es abierto.
Sea 1 2 , entonces rango(J Fb)(1 ) k; sea M una matriz cuadrada extrada
de (J Fb)(1 ) de orden k, y determinante 6= 0.
Denimos
d : '(U ) ! IR 7! d() = det M();
d es continua y d(1 ) 6= 0, luego 9
0 abierto, 1 2 0 y d() 6= 0 en 0 , por tanto es un abierto, pues
8 2 0 ; rango(J Fb)() k =) 0 :
X
Ejemplo 1.83 La aplicacion F
! IR denida por F (x1 ; : : : ; xn ) = (xi )2
i=1
tiene rango 1 en IRn f0g, constante en F 1 (1) = Sn 1. As, la esfera Sn 1 es una
n
: IRn
subvariedad (n 1){dimensional de IRn.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
42
1 Variedades diferenciables. Subvariedades
Ejemplo 1.84 La aplicacion F : IR3 ! IR denida por
2
F (x; y; z) = a (x2 + y2 )1=2 + z2
tiene rango 1 en cada punto de F 1 (b2 ), a > b > 0. As, el lugar geometrico F 1(b2 ),
el toro en IR3, es una subvariedad.
Ejemplo 1.85 Los puntos que constituyen todos los planos tangentes a la esfera
S1:
T (S1) = (x; y) (x1 )2 + (x2 )2 + (x3 )2 1 = 0; x1y1 + x2 y2 + x3 y3 = 0
constituyen una subvariedad de IR6 de dimension 4. Pues, siempre es 2 el rango de
2x1 2x2 2x3
1
2
3
y
y
y
0 0 0
x1 x2 x3
:
1.8 Grupos y subgrupos de Lie
Veremos en este parrafo mas ejemplos de variedades, en las que ademas existe
una estructura de grupo cuyas operaciones son diferenciables.
El espacio IRn es una variedad diferenciable y al mismo tiempo un un grupo
abeliano cuya ley de composicion esta dada sumando componente a componente.
Ademas la estructura algebraica y la estructura diferenciable estan relacionadas:
: IRn IRn ! IRn
(x; y) 7! x + y
es una aplicacion diferenciable de la variedad producto IRn IRn en IRn, esto es, la
operacion del grupo es diferenciable. Tambien vemos que la aplicacion
J : IRn ! IRn
x 7! x
es diferenciable.
Sea ahora G un grupo que es al mismo tiempo una variedad diferenciable. Para
x; y 2 G denotamos por xy el producto y por x 1 el inverso de x.
Denicion 1.86 G es un grupo de Lie si son diferenciables las aplicaciones
: G G ! G
J: G ! G
(x; y) 7! (x; y) = xy
x 7! J (x) = x 1
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.8 Grupos y subgrupos de Lie
43
Ejemplo 1.87 GL(n; IR), el conjunto de las matrices no singulares de orden n n
con coecientes reales, es, como hemos visto (Ejemplo 1.17), un subconjunto
abierto
2
n
de gl(n; IR), conjunto de las n n matrices reales identicadas con IR : Ademas,
GL(n; IRn) es un grupo con respecto a la multiplicacion de matrices. En efecto, una
matriz A es no singular si y solo si det A 6= 0, pero det(AB) = (det A)(det B); as,
si A y B son no singulares, AB lo es tambien. Una n n matriz A no singular tiene
inversa para la multiplicacion; con lo que GL(n; IR) es un grupo.
Las aplicaciones (A; B) 7! AB y A 7! A 1 son diferenciables: El producto tiene
terminos que son polinomios de los terminos de A y B, y estos coecientes son las
expresiones en coordenadas locales de la aplicacion producto, con lo que esta es
diferenciable.
La matriz inversa de A = (aij ) puede ser escrita como
A 1 = det1 A (~aij );
donde a~ij es el adjunto de aij en A (y por tanto un polinomio en los terminos de A)
y det A es un polinomio de los terminos de A que no se anula. Se concluye que los
terminos de A 1 son funciones racionales sobre GL(n; IR), cuyos denominadores no
se anulan, en consecuencia diferenciable.
En denitiva GL(n; IR) es un grupo de Lie.
Ejemplo 1.88 Como caso particular del ejemplo anterior resulta: GL(1; IR) IR
grupo multiplicativo de los numeros reales no nulos es un grupo de Lie.
Ejemplo 1.89 Sea C el conjunto de los numeros complejos no nulos. Se trata
de un grupo con la operacion de multiplicacion de numeros complejos. Ademas
C es una variedad diferenciable de dimensi
on 2, recubierta con un unico entorno
coordenado U = C con homeomorsmo coordenado
' : U ! IR2
z 7! '(z) = '(x + iy) = (x; y):
Usando estas coordenadas la expresion del producto w = zz0 ; z = x + iy; z0 =
x0 + iy0 esta dado por
(z; z0 ) 2 C C ''
?
((x; y); (x0 ; y0 ))
y la aplicacion
-
b
((z; z0 )) = zz0 2 C '
-
(xx0
?
yy0 ; xy0 + yx0 )
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
44
1 Variedades diferenciables. Subvariedades
z 2 C
'
?
(x; y)
J
Jb
-
-
z 1 2 C
'
?
y
x
x2 +y2 ; x2 +y2
Ambas son diferenciables, en consecuencia, C es un grupo de Lie.
Ejemplo 1.90 Si G1 y G2 son grupos de Lie, entonces el producto cartesiano G1 G2
con la estructura diferenciable del producto cartesiano de variedades es un grupo de
Lie:
Las aplicaciones
: (G1 G2 ) (G1 G2) ! G1 G2 ((x1 ; x2 ); (y1 ; y2 )) 7! (x1 y1 ; x2 y2 )
J : G1 G2 ! G1 G2 (x; y) 7! (x 1 ; y 1 )
son diferenciables.
La proposicion siguiente nos permite dar muchos ejemplos de grupos de Lie:
Proposicion 1.91 Sea G un grupo de Lie y H un subgrupo (algebraico) que tambien es subvariedad regular. Entonces con su estructura diferenciable como
subvariedad H es un subgrupo de Lie.
Demostracion.- Se verica facilmente que H H es una subvariedad regular de
G G. As, la aplicacion inclusion i : H H ,! G G es un embebimiento. Si
: G G ! G, (x; y) 7! xy es la ley de composicion del grupo G ( diferenciable),
entonces
i: H H ! G
es diferenciable y ( i)(H H) H.
Si jH denota la aplicacion i, considerada como aplicacion en H, es decir
jH : H H ! H;
jH no es la misma aplicacion que la i, pues se ha cambiado de variedad de
llegada.
Necesitamos demostrar que jH es diferenciable, y similarmente la aplicacion
J : H ! G, dada por x 7! J (x) = x 1 , es diferenciable como aplicacion en H:
JjH : H ! H.
Ambos hechos se siguen del lema que veremos a continuacion, con lo que se
completa la demostracion.
Ejemplo 1.92 La circunferencia S1 puede ser identicada con los numeros complejos de modulo 1. S1 es entonces un grupo de Lie contenido en el grupo de Lie
C .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.8 Grupos y subgrupos de Lie
45
P
.x
U
.y
F(P)
M
N
V
F
φ
IRm-n
φ π φ
ϕ
φ(V N)
IRn
F
IR
p
ϕ(U )
p
(ξ1,...,ξ
. )
π
IRn
F
C (ε)
n
0
Cm0 (ε)=φ(V)
. (F1(ξ1,...,ξp),...,Fn(ξ1,...,ξp))
Fig. 1.16:
Establezcamos el siguiente lema al que se hace alusion en la proposicion anterior.
Lema 1.93 Sea F : P ! M una aplicacion diferenciable entre variedades diferenciables, N una subvariedad regular de M tal que F (P) N. Entonces F : P ! N
es diferenciable.
Demostracion.- Ya que N es una subvariedad regular de M, cada punto de N esta
contenido en un entorno coordenado adaptado a N. Sea x 2 P e y = F (x) 2 M y
sean (U; ') un sistema coordenado alrededor de x en P y (V; ) una carta adaptada
alrededor de y = F (x) en M, tal que F (U ) V . Tenemos (V ) = C0m(") con
(y) = (0; : : : ; 0) 2 IRm (m = dim M) y
(n = dim N):
(V \ N) = 2 C0m(") n+1 = 0; ; m = 0
Entonces la expresion en coordenadas locales de F respecto a estas cartas es
Fb : '(U ) ! C0m(") = (V )
(1 ; : : : ; p) 7 ! F 1(1 ; : : : ; p); : : : ; F n(1 ; : : : ; p ); 0; : : : ; 0 ;
(p = dim P), ya que F (P) N.
Ahora bien (V \ N; ~ = jV \N ) es una carta alrededor de y en N, as F
considerada como aplicacion en N, se expresa respecto a esta carta y a la carta
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
46
1 Variedades diferenciables. Subvariedades
P= IR
M= IR
F
n
P=IR
M= IR
n
F
0
G(IR)=N
F0
0
G
0
IR
Fig. 1.17:
(U; ') en P (ver Fig 1.16)
e
(1 ; : : : ; p ) 7 F! F 1(1 ; : : : ; p ); : : : ; F n (1; : : : ; p) ;
esto es, Fb compuesta con la proyeccion sobre las primeras n coordenadas (proyeccion
de IRm en IRn), as Fb es composicion de aplicaciones diferenciable y por tanto
diferenciable.
Nota 1.94 Este lema no se verica,2 en general,2 si N es una subvariedad
inmersa.
Como ejemplo, sean P = IR; M = IR ; F : IR ! IR , G : IR ! IR2 las aplicaciones que
describen la gura de \ocho" (Ejemplo 1.68) pero recorrida segun indica la Fig. 1.17
y F (0) = G(0); y sea la subvariedad inmersa N = G(IR).
F : IR ! G(IR) no es continua, ya que A = G( ] 1; 1[ ) es un abierto en G(IR)
y F 1 (A) = f0g [ ]; +1[ [ ] 1; [, para algun > 0.
En el caso en que N sea una subvariedad inmersa, la aplicacion F : P ! N del
lema, es diferenciable si es continua, mas precisamente:
Proposicion 1.95 Sea F : P ! M una aplicacion diferenciable entre variedades
(dim P=p, dim M=m), N una subvariedad inmersa de M (dim N=n) y se
verica que F (P) N y F : P ! N es continua. Entonces F : P ! N es
diferenciable.
Demostracion.- En efecto, sea G : N0 ! M la inmersion inyectiva que dene
la subvariedad N, G(N0 ) = N. Entonces existe una unica aplicacion F0 : P ! N0
continua tal que F = G F0. (Fig. 1.18)
F0 es unica por ser G inyectiva. F0 es continua, pues si A es un abierto de N0 ,
entonces G(A) es abierto en N, y por las hipotesis (F : P ! N) F 1(G(A)) = F0 1(A)
es abierto en P.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.8 Grupos y subgrupos de Lie
P
47
F
M
F(P)
U .x
N=G(N’)
N’
F0
ϕ
φ
ϕ’
IR
n
G
F0
ϕ(U )
V
G
U’ .x’
IRp
.y
IRm-n
C0n(ε)
IRn
F
Cm0 (ε)
Fig. 1.18:
Para demostrar que F : P ! N es diferenciable, basta probar que F0 lo es. Para
demostrar que F0 es diferenciable procedemos de la forma siguiente:
Sean los punto x 2 P, x0 = F0 (x) 2 N0 e y = G(F0 (x)) = F (x) 2 M y los sistemas
coordenados (U 0 ; '0 ) y (V; ) en N0 y M, respectivamente, tales que x0 2 U 0 , y 2 V ,
G(U 0 ) V , '0 (x0 ) = (0; : : : ; 0) 2 IRn , '0(U 0 ) = C0n("), (y) = (0; : : : ; 0) 2 IRm ,
(V ) = C0m(") y que la expresion en coordenadas de la inmersion G este dada por
Gb : C0n(") ! C0m("); (1 ; : : : ; n ) 7 ! (1 ; : : : ; n ; 0; : : : ; 0):
Como F0 es continua, existe un sistema coordenado (U; ') en P, tal que x 2 U y
F0(U ) U 0 , que en coordenadas se expresa por
Fc0 : '(U )) ! C0n(");
( 1 ; : : : ; p ) 7
!
c1
n
F0 (1 ; : : : ; p); : : : ; Fc0 (1 ; : : : ; p) :
Ocurre entonces que respecto a las cartas (U; V ) y (V; ) la aplicacion diferenciable tiene la siguiente expresion
Fb = Gb Fc0 : '(U ) ! C0m(");
1
(1; : : : ; p) 7 ! Fc0 (1; : : : ; p); : : : ; Fc0 (1; : : : ; p); 0; : : : ; 0
n
siendo Fb diferenciable, y por tanto rj Fb = Fc0 : '(U ) ! IR son diferenciables (j =
j
1; : : : ; n), es decir rj Fc0 = Fc0 son diferenciables, y por tanto Fc0 es diferenciable,
esto es F0 : P ! N0 es diferenciable.
j
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
48
1 Variedades diferenciables. Subvariedades
Denicion 1.96 Si G es un grupo de Lie, se llaman traslacion a la izquierda y
traslacion a la derecha a las aplicaciones
La : G ! G
x 7 ! La(x) = ax
donde a es un elemento jo de G.
Ra : G ! G
x 7 ! Ra(x) = xa
Proposicion 1.97 Las aplicaciones La y Ra son difeomorsmos y tienen como
inversas a (La ) 1 = La 1 y (Ra) 1 = Ra 1 .
Demostracion.- Para demostrarlo basta observa que, por ejemplo, La es la composicion de las aplicaciones diferenciables:
ia
G G ! G
G ,!
x 7 ! (a; x) 7 ! ax
donde la primera aplicacion es la inclusion y la segunda la ley del grupo. Lo mismo
ocurre con Ra.
Ejemplo 1.98 Grupo lineal especial. SL(n; IR) = X 2 GL(n; IR) det X = 1 .
SL(n; IR) es un subgrupo y una subvariedad regular de GL(n; IR), y por tanto,
por la proposicion anterior, es un grupo de Lie. Para probar esto, consideremos la
aplicacion
F : GL(n; IR) ! IR = IR f0g
X 7 ! F (X ) = det X:
Como det(XY ) = (det X )(det Y ), F es un homomorsmo de grupos (abstractos),
y as Ker F = SL(n; IR) es un subgrupo de GL(n; IR). Ademas F es diferenciable
y tiene rango constante:
Sean A 2 GL(n; IR), a = det A, y LX y Lx las traslaciones en GL(n; IR) y en
IR , respectivamente. Entonces
F (X ) = (La F LA 1 )(X );
ya que se tiene det X = a det(A 1 X ).
Como La y LA 1 son difeomorsmos:
(rango F )X = (rango(La F LA 1 ))X = rango ((La F LA 1 ) (X )) =
= rango (La ) (det(A 1 X )) F(A 1 X ) (LA 1 ) (X ) =
= rango F (A 1 X ) = (rango F )A 1 X :
Esto es, (rango F )X = (rango F )A 1 X ; 8A; X 2 GL(n; IR); con lo que tomando
A = X , resulta
(rango F )X = (rango F )X 1X = (rango F )I :
Es decir, (rango F )X = cte:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
1.8 Grupos y subgrupos de Lie
49
Ejemplo 1.99 Grupo ortogonal. O(n) = X 2 GL(n; IR)X t X = I .
O(n) es un subgrupo de GL(n; IR) y una subvariedad regular y por tanto es un
grupo de Lie. En efecto:
O(n) es subgrupo abstracto de GL(n; IR).
Sea F : GL(n; IR) ! GL(n; IR), X 7! F (X ) = t X X , (t X es la traspuesta de X );
F es diferenciable. Calculemos su rango:
Sea A 2 GL(n; IR) un elemento jo. Si Y es un elemento arbitrario de GL(n; IR),
se puede poner de la forma Y = XA 1 , para un cierto X 2 GL(n; IR). Por
tanto para probar que el rango de F es constante, solo es necesario establecer que
rango(F (X )) = rango(F (XA 1 )).
A tal n, notese que
F (XA 1 ) = t (XA 1 )XA 1 = tA 1 tXXA 1 = (Lt A
as
1 RA 1 F )(X );
rango(F (XA 1 )) = rango (Lt A 1 ) (t XXA 1 ) (RA 1 ) (t XX ) F (X ) =
= rango(F (X ));
por ser LtA 1 y RA 1 difeomorsmos. Ver ademas el Ejercicio 43.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
50
1 Variedades diferenciables. Subvariedades
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Tensores y formas diferenciales
sobre una variedad
2.1 Tensores sobre espacios vectoriales reales
Necesitamos hacer un repaso de algunos hechos de algebra multilineal sobre espacios vectoriales de dimension nita. Para luego aplicar estos conceptos a las variedades diferenciables tomando como base diversos espacios vectoriales y algebras
asociados a sus espacios tangentes.
Denicion 2.1 Se llama producto tensorial de dos espacios vectoriales reales E y F a
todo par (G0 ; '0) formado por un espacio vectorial real G0 y una aplicacion
bilineal '0 : E F ! G0 vericando las dos condiciones siguientes:
E F
1. '0(E F ) genera a G0.
'0 @ h
2. (Propiedad de factorizacion universal) Para
@
todo espacio vectorial real G y toda aplicacion
R
@
bilineal h : E F ! G, existe una unica apli- G0
- G
cacion lineal bh : G0 ! G tal que h = bh '0.
bh
Teorema 2.2 (Existencia y Unicidad) Dados dos espacios vectoriales reales E
y F, existe un unico producto tensorial de E y F, salvo isomorsmo. Lo
denotaremos por (E F; ').
Demostracion.- Existencia: Consideremos el conjunto = (E; F ) de todas
las combinaciones lineales formales de elementos del producto cartesiano E F , es
decir, las expresiones de la forma:
a=
X
i 2I
i (ui; vi );
donde (ui; vi ) 2 E F y i 2 IR, son nulos salvo para un numero nito de ndices.
Observemos que si a; b 2 , se puede siempre tratar de modicar sus expresiones
a~nadiendole, si es preciso, elementos (u; v) con coecientes nulos, y suponerlos de la
forma
r
r
X
X
i
b = i(ui; vi ):
a = (ui ; vi)
i=1
51
i=1
52
2 Tensores y formas diferenciales sobre una variedad
Se dene sobre una estructura de espacio vectorial, poniendo
a+b =
r
X
i=1
(i + i)(ui ; vi )
a = r
X
i=1
i (ui; vi )
As, es el espacio vectorial generado por E F : = E^
F.
Consideremos ahora el subespacio 0 de engengrado por los elementos de la
forma
(1 u1 + 2u2; 1v1 + 2v2 ) 11 (u1; v1) 1 2(u1; v2 ) 21 (u2; v1) 2 2(u2; v2 )
con u1; u2 2 E ; v1; v2 2 F ; 1; 2 ; 1; 2 2 IR.
Sea el espacio vectorial cociente = 0 (que denotamos por E F ) y la proyeccion
canonica : ! = 0 . Entonces el par ( = 0 ; jEF ) (E F; ') es el producto
tensorial de E y F, donde ' es la restriccion jEF : E F ! = 0 :
Probemos en primer lugar que ' es bilineal: Las sumas formales
(1 u1 + 2 u2; v) 1 (u1; v) 2(u2 ; v)
(u; 1 v1 + 2v2 ) 1 (u; v1) 2(u; v2 )
pertenecen a 0 . En consecuencia, su imagen mediante es nula. As:
(1 u1 + 2 u2; v) 1 (u1; v) 2 (u2; v) = 0
(u; 1v1 + 2 v2) 1 (u; v1) 2 (u; v2) = 0
con lo que
' (1 u1 + 2u2; v) = 1' (u1; v) + 2 ' (u2; v)
' (u; 1 v1 + 2 v2) = 1' (u; v1 ) + 2' (u; v2)
lo que prueba que ' es bilineal.
Ya que la propiedad 1. se sigue de la construccion, tenemos solo que probar que
la 2. es valida:
Sea G un espacio vectorial real y f : E F ! G una aplicacion bilineal. Ya que
E F genera a = (E; F ), podemos extender f a una aplicacion lineal f 0 : ! G
f0
X
i 2I
! X
i (ui; vi ) =:
i 2I
i f (ui; vi ) :
Como f es bilineal, f 0 se anula en 0, y por tanto, f 0 induce una aplicacion lineal
fb: E F ! G. Obviamente f = fb '. La unicidad de fb se sigue de que '(E F )
genera a E F .
E F
' @ '0
Unicidad: Sea (G0 ; '0) otro par gozando
@
de la propiedad de factorizacion universal para
R
@
E F . Por la propiedad de factorizacion
E
F G0
universal de (E F; ') [respectivamente, de
f
@
(G0 ; '0)], existe una unica aplicacion lineal
fb @ ? fb0
: E F ! G0 [resp., : G0 ! E F ] tal
R
@
que '0 = ' [resp., ' = '0]. Entonces
G : La Laguna; 1997
Variedades diferenciables: Angel Montesdeoca
2.1 Tensores sobre espacios vectoriales reales
53
' = ( ) '
y
'0 = ( ) '0
Usando la unicidad de fb en la denicion de la propiedad de factorizacion universal, concluimos que y son las transformaciones identidad en E F y G0
respectivamente, esto es = 1 .
Si (u; v) es un elemento de , su clase en E F , es decir, la imagen mediante la
proyeccion canonica : ! E F , la denotamos por u v.
De acuerdo con la construccion de E F se satisfacen las siguientes identidades:
(u1 + u2) v = u1 v + u2 v u (v1 + v2) = u v1 + u v2
(u v) = (u) v = u (v)
para todo u; u1; u2 2 E ; v; v1; v2 2 F ; 2 IR.
Proposicion 2.3 Sea E un espacio vectorial real y consideremos a IR como un
espacio vectorial real. Entonces IR E es isomorfo a E.
Demostracion.- En efecto, sea f : IR E ! E la aplicacion bilineal que dene
la ley externa en E . En virtud de la propiedad de la factorizacion universal, existe
una unica aplicacion fb: IR E ! E tal que
fb( v) = v; 8 2 IR 8v 2 E:
Por otra parte, existe una aplicacion lineal g : E ! IR E , x 7 ! g(x) = 1 x,
tal que fb g = 1E y g fb = 1IR
E ; en consecuencia, fb es un isomorsmo.
Proposicion 2.4 E F y F E son canonicamente isomorfos.
Demostraci
on.- Sea f : E F ! F E la aplicacion bilineal denida por
f (u; v) = v u. Factorizando E F , existe una unica fb : E F ! F E
aplicacion lineal, tal que fb(u v) = v u. Simultaneamente, existe una unica
aplicacion lineal fb0 : F E ! E F tal que fb0 (v u) = u v. Es obvio que fb0 fb
y fb fb0 son las transformaciones identidad en E F y F E , respectivamente; con
lo que fb: E F ! F E es un isomorsmo, y se tiene pues una biyeccion lineal
canonica de E F y F E .
Nota 2.5 En caso de ser E = F se ve que existe una biyeccion lineal unica de E E
en s mismo, que envia u v sobre v u, para u; v 2 E . Pero no podemos identicar
u v con v u, pues esta biyeccion no es la identidad. (La misma situacion aparece
en el producto cartesiano: Si A; B son dos conjuntos; (x; y) 7! (y; x) es una biyeccion
de A B sobre B A; para A = B, esta biyeccion no es la identidad).
Proposicion 2.6 (E F ) G y E (F G) son canonicamente isomorfos a
E F G.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
54
2 Tensores y formas diferenciales sobre una variedad
Demostracion.- En efecto, procediendo de forma analoga que para la denicion
de producto tensorial de dos espacios vectoriales, se dene el producto tensorial
H0 = E F G y una aplicacion trilineal canonica '0 : E F G ! E F G
denotada por
'0(u; v; w) = u v w:
De esta forma toda aplicacion trilineal f : E F G ! (E F ) G se prolonga
a una aplicacion lineal unica
fb: E F G ! (E F ) G tal que fb(u v w) = (u v) w:
Existe una aplicacion lineal g : (E F )
G ! E F G denida por (u
v)
w 7!
u v w tal que fb g y g fb son identidades. Luego E F G y (E F ) G son
canonicamente isomorfos.
Se demuestra de forma similar que E F G ' E (F G). El producto
tensorial es pues asociativo.
Proposicion 2.7 Dadas a las aplicaciones lineales fi : Ei ! Fi ; i = 1; 2, existe
una unica aplicacion lineal
f : E1 E2 ! F1 F2; f (v1 v2 ) = f1 (v1) f2(v2 ); 8v1 2 E1; 8v2 2 E2:
Demostracion.- Consideremos la aplicacion bilineal
g : E1 E2 ! F1 F2 denida por (v1 ; v2) 7 ! g (v1 ; v2) = f1 (v1 ) f2 (v2 );
existe entonces, por la propiedad de factorizacion universal, una unica aplicacion
lineal
f : E1 E2 ! F1 F2; f (v1 v2 ) = g (v1 ; v2) = f1 (v1)
f2 (v2 ); 8(v1; v2) 2 E1 E2:
Nota 2.8 La aplicacion f obtenida en esta Proposicion 2.7 la denotaremos por
f1 f2 producto tensorial de f1 y f2 . La generalizacion al caso de mas de dos
aplicaciones es inmediata.
Proposicion 2.9 Si E,F,G son espacios vectoriales reales, el conjunto L2(E F; G),
de todas las aplicaciones bilineales de E F en G, es isomorfo a L(E F; G),
aplicaciones lineales de E F en G.
Demostracion.- Dada una aplicacion bilineal f : E F ! G, la propiedad de
factorizacion universal de E F , nos permite asegurar la existencia de una unica
aplicacion lineal fb: E F ! G. Podemos entonces denir la aplicacion
b
: L2 (E F; G) ! L(E F; G) f 7 ! (f ) = f:
Esta aplicacion esta bien denida, es lineal, inyectiva y sobreyectiva; en consecuencia, es un isomorsmo: L2 (E F; G) ' L(E F; G).
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.1 Tensores sobre espacios vectoriales reales
55
Corolario 2.10 Si E y F son espacios vectoriales reales
(E F ) ' L2(E F; IR):
Proposicion 2.11 Sean E y F espacios vectoriales sobre IR con dim E = n y
dim F = m. Si fe1; : : : ; eng es una base de E y ff1; : : : ; fm g es una base de
F, entonces fei fj gi=1;:::;n; j=1;:::;m es una base de E F y dim E F =
(dim E )(dim F ) = nm.
Demostracion.- Denimos las aplicaciones
`k : E F ! IR por `k (ei ; fj ) = i` jk (i; ` = 1; : : : ; n; j; k = 1; : : : ; m)
Estas aplicaciones se extienden por linealidad a todos los elementos de E F y
son linealmente independientes en L2 (E F; IR). En efecto, si
X
`k `k = 0;
1`n
1k m
entonces
0=
X
1`n
1k m
`k `k (ei ; fj ) =
`k 2 IR
X
1`n
1k m
lk i` jk = ij :
Por tanto, y por el corolario anterior, dim (E F ) = dim L2 (E F; IR) nm.
Ahorabien, todo elemento u v = ' (u; v) es combinacion lineal de ei fj =
' (ei ; fj ) , y ya que '(E F ) genera a E F , se sigue que fei fj gi=1;:::;n; j=1;:::;m
genera a E F . As, se tiene la otra desigualdad:
dim (E F ) = dim E F nm:
Proposicion 2.12 Sean E y F espacios vectoriales de dimension nita. Entonces
E F ' L(E; F ):
Demostracion.- Consideremos la aplicacion bilineal
f : E F ! L(E; F )
f (; v) (u) = (u)v; 8 2 E ; 8u 2 E; 8v 2 F;
que al factorizarla a traves de E F , existe una unica aplicacion lineal
fb: E F ! L(E; F ) tal que fb( v) (u) = (u)v:
Probemos que fb es un isomorsmo: Sea fe1 ; : : : ; en g una base de E , fe1; : : : ; eng
su base dual en E y ff1 ; : : : ; fm g un a base de F . Demostremos que
nb
f (ei fj ) 1 i n; 1 j m
o
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
56
2 Tensores y formas diferenciales sobre una variedad
son linealmente independientes; si
X
1in
1j m
ji fb(ei fj ) = 0;
ji 2 IR
entonces
1
0
m
X ji X
X jb i C
jk fj = 0
f
=
f
(
e
f
)
(
e
)
=
0=B
@
j A k
i k j
i
1in
1j m
1in
1j m
j =1
(k = 1; : : : ; n);
y de aqu, al ser ff1 ; : : : ; fm g una base, resulta ji = 0.
Ahora bien, ya que dim E F = dim L(E; F ) = nm, fb es un isomorsmo de
E F sobre L(E; F ).
Proposicion 2.13 Dados dos espacios vectoriales E y F de dimension nita, se
tiene
E F ' (E F ) :
Demostracion.- Por la propiedad de factorizacion universal de E F , la aplicacion bilineal f : E F ! (E F ) denida por
f (; ) (u v) = (u) (v); 8(u; v; ; ) 2 E F E F da lugar a una aplicacion lineal fb: E F ! (E F )
tal que
fb( ) (u v) = (u) (v) 8(u; v; ; ) 2 E F E F :
Para probar que fb es un isomorsmo, basta con tomar bases en E; F; E ; F , y
proceder como en la demostracion de la proposicion precedente.
2.2 Algebra tensorial
Denimos ahora varios espacios tensoriales asociados a un espacio vectorial real
jo E , de dimension nita.
r E = E r) E espacio
Denicion 2.14 Para un entero positivo r, llamamos a NN
tensorial contravariante de grado r. UnNelemento de r E se denomina tensor
contravariante
de grado r. Si r = 1; 1 E = E , y por convenio agregamos
N
que 0 E = IR.
N
s)
Similarmente, s E = E E se llama espacio tensorial covariante de grado s, y sus elementos, N
tensores covariantes de grado s. Entonces
N
1 E = E , y convenimos en que 0 E = IR.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.2 Algebra tensorial
57
Denimos el espacio tensorial de tipo (r,s), o espacio tensorial de grado
contravariante r y de grado covariante s, como el producto tensorial
Nr E = (Nr E) (N E ) = E r) E E s) E ;
s
s
a sus elementos le denominamos tensores de tipo (r,s).
Componentes de un tensor. Criterio de tensorialidad
Sea fN
e1r; : : : ; en g una base de E y fe1; : : : ; eng su base dual en E , entonces una
base de s E esta formada por los elementos del conjunto
e e ej1 ejs 1 i ; j n; 1 k r; 1 ` s :
i1
ir
k `
Todo tensor de tipo (r; s) puede expresarse de forma unica por
t=
X
1i1 ir n
1j1 js n
tij11ijrs ei1 eir ej1 ejs ;
donde los tij11ijrs son denominadas componentes de t respecto a la base fei gi=1;:::;n.
Para un cambio de base en E , las componentes de los tensores sufren las siguientes
transformaciones:
Sean fe1 ; : : : ; en g y fe1; : : : ; eng dos bases de E relacionadas por la transformacion lineal
n
X
ei = Aji ej ; (i = 1; : : : ; n):
j =1
El correspondiente cambio de las bases duales en E esta dado por
n
X
i
e = Bji ej ;
j =1
( i = 1 ; : : : ; n)
donde B = (Bji ) es la matriz inversa de la matriz A = (Aij ) tal que
n
X
j =1
Aij Bkj = ki .
As para las componentes del tensor de tipo (r; s) expresado arriba tenemos la
siguiente transformacion:
X i1 ir `1 `s k1 kr 1i1 ;:::;ir n i
i
1
r
Ak1 Akr Bj1 Bjs t `1`s
t j1 js =
1k1 ;:::;kr n
1`1 ;:::;`s n
1j1 ;:::;js n
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
58
2 Tensores y formas diferenciales sobre una variedad
Es esta la ley de transformacion tensorial que constituye un criterio de tensorialidad, que nos permite averiguar cuando una serie de numeros reales son las componentes de un tensor.
X Nr
Denicion 2.15 Al espacio vectorial suma directa T (E ) =
s E , siendo
N0 E = IR, se denomina algebra tensorial de E.
0
X r
Un elemento de T (E ) es de la forma
r;s0
r;s0
Ks , donde Ksr 2
Nr E y son nulos
s
salvo un numero nito de ellos. Cada elemento de T (E ) se denomina simplemente
tensor.
Sobre T (E ) se dene una estructura de algebra graduada, asociativa, con elemento
unidad y no conmutativa sobre IR, deniendo un producto
: T (E ) T (E ) ! T (E )
de la forma siguiente: si
N
N
u = u1 ur 1 s 2 rs E y v = v1 vp !1 !q 2 pq E;
N
por denicion, u v 2 rs++pq E es el elemento
u v = u1 ur v1 vp 1 s !1 !q ;
y se extiende este producto por linealidad a todo T (E ). As tenemos la ley de
composicion
: T (E ) T (E ) ! T (E ) (K; L) 2 Nrs E Npq E 7 ! K L 2 Nrs++pq E
En terminos de componentes, si K esta dado por Kji11jirs y L por L`k11`kqp , entonces
ir+p
(K L)ji11ijrs++pq = Kji11jirs Lijrs+1
+1 js+q
Denicion 2.16 Los elementos de T (E ) que pertenecen a Nrs E se denominan tensores homogeneos de grado (r,s). Un tensor homogeneo se dice descomponible
si puede ser escrito de la forma
v1 vr !1 !s
con vi 2 E y !j 2 E , (i = 1; : : : ; r, j = 1; : : : ; s).
Denicion 2.17 Sean r; s 1, enteros; para cada par ordenado de enteros (`; k),
tales que 1 ` r y 1 k s, se le asocia una aplicacion lineal, llamada
contraccion y denotada por C`k :
C`k : Nrs E ! Nrs 11 E
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.2 Algebra tensorial
59
C`k (v1 vr !1 !s) =
= !k (v` )v1 vb` vr !1 !ck !s;
donde vi 2 E , !j 2 E (i = 1; : : : ; r; j = 1; : : : ; s) y b signica que ese
termino se suprime.
N
En terminos de componentes la contraci
on C`k aplica un tensor K 2 rs E de
N
ir en un tensor C k K 2 r 1 E , cuyas componentes, con respecto
componentes Kji11
js
`
s 1
a bases duales, estan dadas por
n
i1 ir 1 X i1 i` 1 hi` ir 1
k
C` K j1 js 1 = Kj1 jk 1 hjk js 1 :
h=1
Interpretacion de tensores como aplicaciones multilineales
Proposicion 2.18 Ns E = E s) E es canonicamente isomorfo al espas)
cio vectorial Ls(E E; IR), de todas las aplicaciones multilineales de
s)
E E en IR.
Demostracion.- Si factorizamos la aplicacion multilineal
f : E s) E ! Ls (E s) E; IR);
( 1 ; : : : ; s ) 7
!
f (1 ; : : : ; s ) (v1; : : : ; vs ) = 1 (v1 ) s (vs );
s)
8vi 2 E;
a traves del producto tensorial E E , se obtiene un isomorsmo
fb: E s) E ! Ls (E s) E; IR):
N
Resulta, por tanto, que podemos identicar los elementos de s E (tensores de
s)
tipo (0; s)) con aplicaciones multilineales de E E en IR.
Proposicion 2.19 Nr E = E r) E es isomorfo a Lr (E r) E ; IR)
Demostracion.- Se procede de forma analoga a la proposicion anterior. Se idenr)
tican as, los tensores de tipo (r; 0) con aplicaciones multilineales de E E en IR.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
60
2 Tensores y formas diferenciales sobre una variedad
Proposicion 2.20 N1s E = E E s) E es isomorfo a Ls(E s) E; E )
Demostracion.- Usando sucesivamente las Proposiciones 2.4, 2.12 y las correspondientes generalizaciones de las Proposiciones 2.13 y 2.9, resulta
E
(
N E ) ' (N E ) E ' L (N E ) ; E ' L(Ns E; E ) ' L (E s) E; E ):
s
s
s
s
Con esta interpretacion un tensor K de tipo (1; s) es una aplicacion multilineal
s)
de E E en E . Si fe1 ; : : : ; en g es una base de E , K = Kji1 js ei ej1 ejs
s)
se corresponde con la aplicacion multilineal de E E en E tal que
K (ej1 ; : : : ; ejs ) = Kji1 js ei :
Nota 2.21 Hemos denotado por fe1 ; : : : ; en g la base dual, en el espacio vectorial
dual E , de la base fe1; : : : ; eng de E .
Tambien hemos prescindido del signo de sumatorio, lo cual haremos en lo sucesivo, entendiendo que si un superndice coincide con un subndice de terminos distintos el sumatorio se extiende al rango de dicho ndice.
Similar interpretacion puede darse para tensores de tipo (r; s) sobre E , por ejemplo:
Proposicion 2.22 El espacio vectorial Nrs E = E r) E E s) E es
s)
r)
isomorfo a Ls;r (E E E E ; IR) espacio vectorial de las aplir)
s)
caciones multilineales de E E E E en IR.
s)
r) E ; IR) se le asigna
Demostraci
o
n
.Si
a
cada
f
2
L
(
E
E
E
s;r
N
fb 2 L( sr E; IR), de tal forma que el diagrama siguiente sea conmutativo
f
s)
r)
E E E E IR
Q '
3
fb
Q
s s)
r)
Ns E = EQ
E E
E
r
N
(siendo fb la factorizacion de f a traves del producto tensorial sr E ), resulta un
isomorsmo. As:
N
N
s)
r)
Ls;r (E E E E ; IR) ' L( sr E; IR) ' ( sr E ) '
' E s) E E r) E ' E r) E E s) E ' Nrs E
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.2 Algebra tensorial
61
Extension de un isomorsmo entre espacios vectoriales a un isomorsmo
entre algebras tensoriales
Proposicion 2.23 Existe una correspondencia biyectiva canonica entre los isomorsmos lineales de un espacio vectorial E sobre otro espacio vectorial F y los
isomorsmo de las algebras T(E) sobre T(F) que conservan el tipo tensorial
y conmutan con la contraccion.
En particular, el grupo de automorsmos de E es isomorfo, de forma
canonica, al grupo de los automorsmos del algebra tensorial T(E) que
conservan el tipo tensorial y conmutan con la contraccion.
Demostracion.a) Si f : E ! F es un isomorsmo lineal, entonces su traspuesta tf : F ! E es un isomorsmo y tf 1 : E ! F es un isomorsmo. Por la Proposicion 2.7,
obtenemos un unico isomorsmo lineal f tf 1 : E E ! F N
rF . En general,
N
obtenemos un isomorsmo lineal de T (E ) sobre T (F ) que aplica s E sobre rs F .
Este isomorsmo, llamado extension de f y denotado por fe, es el unico isomorsmo
entre las algebras T (E ) y T (F ) que es extension de f ; la unicidad se sigue del hecho
de estar T (E ) generado por IR,E y E .
N
fe conmuta con toda contraccion, pues si v1 vr 1 s 2 rs E
e k
f C` (v1 vr 1 s ) =
= k (v` )f (v1 ) f[
(v` ) f (vr ) tf 1 (1 ) 1 (k ) tf 1 (s ) =
tf\
= C`k f (v1 ) f (vr ) tf 1 (1 ) tf 1 (s ) =
k e
= C` f (v1 vr 1 s );
donde b N
signica que se suprime ese factor. De aqu se deduce que C`k fe = fe C`k ,
en todo rs E .
b) Probemos ahora que todo isomorsmo de algebras h : T (E ) ! T (F ) esta
inducido por un isomorsmo f : E ! F , en el supuesto que h conserve el tipo
tensorial y conmute con la contraccion.
N1 E = E isomorcamente sobre
Ya
que
h
conserva
el
tipo
de
tensores,
aplica
N1 F = F . Denotaremos la restriccion de h a E por 0f . Ya que aplica todo elemento
0
del cuerpo IR sobre s mismo, y conmuta con toda contraccion, tenemos, para todo
v 2 E y 2 E ,
h() f (v) = h() h(v) = C11 h(v) h() =
= C11 h(v ) = h C11 (v ) = h (v) = (v):
Entonces h() = tf 1 ().
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
62
2 Tensores y formas diferenciales sobre una variedad
h y la extension de f coinciden sobre IR, E y E , y ya que el algebra tensorial
esta generada por IR, E y E , h coincide con la extension de f .
2.3 Algebra exterior
Tensores simetricos y antisimetricos
N
p)
Sea p un entero positivo, y consideremos p E ' Lp(E E; IR) el espacio vectorial de todos los tensores covariantes de orden p sobre E . Denimos las
aplicaciones lineales
S : Np E ! Np E ;
A : Np E ! N p E ;
respectivamente por:
(S K )(v1 ; : : : ; vp) = p1!
N
(AK )(v1 ; : : : ; vp) = p1!
X
2Sp
X
2Sp
K (v(1); : : : ; v(p))
" K (v(1); : : : ; v(p))
donde K 2 p E ,vi 2 E , Sp es el grupo de las permutaciones de p elementos y igual a +1 o -1 segun que la paridad de la permutacion sea par o impar respecto
a la permutacion natural (1; 2; : : : ; p).
Denicion 2.24 A las aplicaciones A y S se les denomina operador antisimetrizacion
y simetrizacion, respectivamente.
N
Un tensor K 2 p E , se llama antisimetrico o alternado si AK = K y
K se dice que es simetrico si S K = K .
EstasNcondiciones
de la denicion se expresan en forma equivalente como sigue:
K 2 p E es simetrico si para cada 1 i; j p, se tiene
K (v1 ; : : : ; vi ; : : : ; vj ; : : : ; vp ) = K (v1; : : : ; vj ; : : : ; vi ; : : : ; vp):
Similarmente, K es antisimetrico si al intercambiar los ndices 1 i; j p,
cambia el signo
K (v1; : : : ; vi ; : : : ; vj ; : : : ; vp) = K (v1 ; : : : ; vj ; : : : ; vi ; : : : ; vp );
o equivalentemente
K (v1 ; : : : ; vi ; : : : ; vi ; : : : ; vp) = 0:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.3 Algebra exterior
63
Nota 2.25 Todo esto, de hecho, es valido tambi
Np en para el espacio de todos los
tensores contravariantes de orden p sobre E :
E . No obstante, nos ocuparemos,
en lo sucesivo, solamente de los tensores covariantes antisimetricos.
p)
El conjunto de las aplicaciones multilineales antisimetricas de E E en
IR (tensores N
covariantes antisimetricos deVorden p sobre EV) forman un subespacio
vectorial V
de p E y lo denotaremos por p E . PonemosV 0 E = IR. Para p = 1,
p E = f0g.
tenemos 1 E = E .VY si p > n (n = dim V
E ), entonces
V
V
Denotaremos por E la suma directa 0 E 1 E n E , o sea
VE = IR E V2 E VnE :
X Nk V E es un subespacio vectorial de
E , pero no una subalgebra, pues si
k
0
V
V
2 p E y 2 qVEp+,q se puede demostrar, con un ejemplo, que puede no
ser un elemento de
E . Esto es, el producto tensorial de tensores alternados
sobre E no es, en general, un tensor alternado sobre E . Sabemos que cada tensor
determina un tensor antisimetrico: su imagen mediante el operador antisimetrizacion
A. Este hecho nos va servir para dar otra multiplicacion de tensores antisimetricos.
Denicion 2.26 La aplicacion
^ : VpE Vq E ! Vp+q E (; ) 7 ! ^ = A( )
se llama producto exterior de y .
Propiedades del producto exterior
V
1) Bilineal: Si ; ; 2 p E , a; b 2 IR, se tiene
(a + b ) ^ = a( ^ ) + b( ^ );
^ (a + b ) = a( ^ ) + b( ^ );
relaciones que surgen claramente de la denicion de producto exterior: linealidad de
A y distributividad del producto tensorial.
V
V
V
2) Asociativa: Si 2 p E ; 2 q E y 2 r E , entonces
( ^ ) ^ = ^ ( ^ ):
Para probarla, primero
N establezcamos
N la propiedad
N del operador antisimetrizacion siguiente: Si P 2 p E , Q 2 q E y R 2 r E , entonces
A(P Q R) = A A(P Q) R = A P A(Q R):
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
64
2 Tensores y formas diferenciales sobre una variedad
Para ello, sea S = Sp+q+r el grupo de las permutaciones de (1; 2; : : : ; p + q + r)
y S0 el subgrupo de S que deja jo los ultimos r elementos; S0 es isomorfo al grupo
de las permutaciones Sp+q de (1; 2; : : : ; p + q).
Tenemos, para v1; : : : ; vp+q+r 2 E
A A(P Q) R (v1 ; : : : ; vp+q+r ) =
X
" A(P Q)(v(1) ; : : : ; v(p+q))R(v(p+q+1) ; : : : ; v(p+q+r)) =
= (p + q1 + r)!
2S
X
= (p + q1 + r)! (p +1 q)!
X
"0 P (v0 (1); : : : ; v0 (p))
0
0
2S 2S
Q(v0 (p+1); : : : ; v0 (p+q))R(v0 (p+q+1); : : : ; v0 (p+q+r));
donde hemos usado que " "0 = "0 y que 0 es la identidad sobre los ultimos r
elementos de (1; 2; : : : ; p + q + r).
La relacion anterior es igual a
1 X " 0 A(P Q R)(v 0 ; : : : ; v 0
(1)
(p+q+r)) =
(p + q)! 0 2S0 = A(P Q R) (v1 ; : : : ; vp+q+r );
ya que A(P Q R) es antisimetrico y por tanto el ultimo sumatorio tiene (p + q)!
sumandos iguales.
Por tanto
A(P Q R) = A A(P Q) R:
La segunda igualdad se prueba de forma analoga.
Tenemos que
( ^ ) ^ = A( ) ^ = A A( ) =
= A A( ) = ^ A ( ) = ^ ( ^ ) :
V
3) Si i 2 pi E ; (i = 1; : : : ; k) entonces
1 ^ 2 ^ ^ k = A(1 2 k ):
Se trata de una generalizacion inmediata de la propiedad anterior, suprimiendo
los parentesis, debido a la asociatividad del producto tensorial.
V
Estas propiedades nos permite dotar a E de una estructura de algebra asociativa sobre IRn. Para ello denimos el producto
^ : VE ! VE Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.3 Algebra exterior
65
simplemente extendiendo el producto
exterior por bilinealidad para que se verique
V
la ley distributiva. As si ; 2 E , entonces si n = dim E
= 1 + + k ; i 2
V
Vpi E (1 i k; 0 pi n)
= 1 + + `; j 2 qj E (1 j `; 0 qj n = dim E )
y denimos
k X̀
X
i ^ j :
^ =
i=1 j =1
Denicion 2.27 El algebra V E asociativa as obtenida , se llama algebra exterior
o algebra de Grassmann
y a sus elementos se les denomina formas sobre E.
V
Las formas en k E se dicen que son de grado k o k{formas.
V
4) El algebra exterior E es anticonmutativa; es decir, se tiene la siguiente
propiedad:V
V
Si 2 p E y 2 q E , entonces
^ = ( 1)pq ^ :
Esto es equivalente a demostar que
A( ) = ( 1)pq A( ):
Para probar esta igualdad, observemos que para todo v1 ; : : : ; vp+q 2 E
= (p +1 q)!
=
X
2Sp+q
A( ) (v1 ; : : : ; vp+q ) =
" (v(1); : : : ; v(p)) (v(p+1); : : : ; v(p+q)) =
X
1
(p + q)! 2Sp+q " (v(p+1); : : : ; v(p+q))(v(1) ; : : : ; v(p)) =
X
1
(p + q)! 2Sp+q " (v (1); : : : ; v (q) )(v (q+1) ; : : : ; v (p+q)) =
= A( ) (v (1); : : : ; v (q) ; v (q+1); : : : ; v (p+q)) = " A( ) (v1 ; : : : ; vp+q )
siendo la permutacion que enva la (p + q){upla (1; : : : ; p; p + 1; : : : ; p + q) en la
(p +1; : : : ; p + q; 1; 2; : : : ; p). Y, ya que es facil comprobar que " = ( 1)pq , podemos
escribir
^ = ( 1)pq ^ :
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
66
2 Tensores y formas diferenciales sobre una variedad
Proposicion 2.28 Si f!1; : : : ; !ng es una base de E , entonces
!i1 ^ ^ !ir 1 i < i < < i n
1 2
r
V
V
es una base de r E (r n) y dim E = 2n.
V
Demostracion.- Si r > n, sabemos que r E = f0g. Sea entonces un entero
r n, y f!V1;r: : : ; !ng laNbase
dual en E de la base fe1 ; : : : ; en g de E .
r
Ya que E = A( N
E r), la imagen mediante
el operador antisimetrizacion de
V
r
i
i
1
r
la base f! ! g de E genera a E . Tenemos que A(!i1 !ir ) =
! i1 ^ ^ ! ir .
Pero por otra parte, de acuerdo con la propiedad anticonmutativa, al permutar
el orden de los i1 ; : : : ; ir , los elementos que se obtienen en el segundo miembro
son
iguales, salvo a caso un cambio de signo. Deducimos que el conjunto de nr elementos
!i1 ^ ^ !ir 1 i < i < < i n
1 2
r
V
r
genera a E . Ademas son independientes: sea
X
ai1 ir !i1 ^ ^ !ir = 0:
1i1 <<ir n
Si aplicamos esta relacion a los vectores (ek1 ; : : : ; ekr ); 1 k1 < < kr n,
obtenemos:
0
0=@
= r1!
X
1i1 <<ir n
X
1
ai1 ir !i1 ^ ^ !ir A (ek1 ; : : : ; ekr ) =
X
1i1 <<ir n 2Sr
= r1!
= r1!
X
" ai1ir !i1 (e(k1 )) !ir (e(kr )) =
1i1 <<ir n
X
1i1 <<ir n
ai1ir !i1 (ek1 ) !ir (ekr ) =
ai1 ir ki11 kirr = r1! ak1 kr = 0:
Como esto es cierto para cualquiera que sean los elementos k1 < < kr tomados, resulta que todos los coecientes son nulos y los elementos del conjunto
!i1 ^ ^ !ir 1 i < i < < i n
1 2
r
V
son independientes. As dim r E = nr , y
V
V
V dim E = dim IR E 2E n E =
n
n n
= (1 + 1)n = 2n:
+ +
+
=
0
1
n
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.3 Algebra exterior
67
Nota 2.29 Suele darse tambien la siguiente
denicionVde
producto exterior, que
V
p
q
denotamos aqu por ^, de dos formas 2 E y 2 E :
^ = (pp+! qq! )! A( ):
Por consiguiente, la relacion entre este producto exterior y el que nosotros hemos
adoptado es:
V
V
^ = (pp+! qq! )! ^ ; 2 pE ; 2 q E :
Isomorsmo entre Vp E y (Vp E )
N
El estudio que hemos hecho para tensores covariantes de orden p ( p E =
p)
Lp(E E; IR)), lo podemos efectuar de forma paralela con tensores contravariN
p)
antes de orden p ( p E = Lp(E E ; IR)). As, podemos denir el subespacio
vectorial
de los tensores contravariantes de orden p antisimetricos, que denotamos
V
p
por E ; y dotar al conjunto
VE = IR E V2 E VnE
de estructura de algebra asociativa. Se tiene entonces los siguientes isomorsmos
canonicos:
Proposicion 2.30 Vp E es isomorfo a (Vp E ) , y por consiguiente
VE ' (VE ) :
V
Demostraci
on.- Consideremos la aplicacion que a ' 2 ( p E ) le asocia el eleV
p
mento 'b 2 E , denido como sigue:
'b : E p) E ! IR 'b (v1 ; : : : ; vp) = '(v1 ^ ^ vp); 8v1; : : : ; vp 2 E;
esta aplicacion 'b esta bien denida; es decir, 'V
b es multilineal y alternada (o antisimetrica); esto es, se trata de un elemento de p E .
Ademas la aplicacion ' 7 ! 'b verica
V
c' = 'b
y
'\
+ = 'b + b; 8 2 IR; 8'; 2 ( pE ) :
Vp E ) =
Y,Vnalmente,
si
'
b
=
0,
resulta
que
'
=
0.
Por
lo
que
al
ser
dim
(
V
dim Vp E = np , se tiene que la aplicacion ' 7 ! 'b es un isomorsmo de ( p E )
sobre p E .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
68
2 Tensores y formas diferenciales sobre una variedad
Como consecuencia de estos isomorsmos para p = 0; 1; : : : ; n, se tiene
!
n
n V
n
VE = X
k E ' X(Vk E ) ' X Vk E = (V E ) :
k=0
k=0
k=0
Extension de un isomorsmo sobre E a un isomorsmo sobre V E Para terminar esta seccion, consideremos la extensiV
on de un isomorsmo de un
espacio vectorial E sobre s mismo, a un isomorsmo de E en s mismo. (Tambien
se puede considerar el caso en que el isomorsmo sea de un espacio vectorial E sobre
otro F ).
Si f : EV! E esVun isomorsmo, entonces f induce un unico isomorsmo de
algebras
fe: E V! E que es extension de f ; fe conserva el grado tensorial, esto
V
k
es, fe: E ! k E V
.
V
V
b
En particular, f : n E ! n E . Entonces ya que dim n E = 1, existe
2 IR tal que
fej^n E = 1j^nE ;
este escalar es precisamente el determinante de la matriz asociada a f .
2.4 Tensores en un punto de una variedad
Sea M una variedad diferenciable n{dimensional y consideremos los espacios vectoriales Tx(M) y Tx (M) de los vectores tangentes y cotangentes a M en un punto
x, respectivamente. Trasladando los conceptos de algebra tensorial asociada a un
espacio vectorial arbitario al espacio tangente a una variedad, tenemos las siguientes
deniciones:
Denicion 2.31 Un tensor r veces contravariante en x 2 M es un elemento del espaN
r)
cio vectorial r Tx(M); es decir, una aplicacion Tx (M) Tx (M) ! IR
multilineal.
Un tensor s veces covariante en x 2 M es un elemento del espacio vectorial
N Tx(M) = Ns T (M); es decir, una aplicacion Tx(M) s) Tx(M) ! IR
x
s
multilineal.
Un tensor de tipo (r,s) en x 2 M, es decir r veces
contravariante
y s veces
N
N
r
r
covariante, es un elemento del espacio vectorial s Tx(M) =
Tx (M) Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.5 Fibrado tangente. Campos de vectores
69
Ns T (M);
s)
esto es, una aplicacion multilineal Tx(M) Tx(M) r
)
Tx (M) Tx(M) ! IR.
p{forma diferencial en x 2 M es un elemento del espacio vectorial
Vp TUna
x (M); es decir, un tensor p veces covariante antisimetrico; o lo que es lo
p)
mismo, una aplicacion multilineal antisimetrica Tx(M) Tx(M) ! IR.
x
En particular, los vectores tangentes a M en x son tensores de tipo (1,0) en x
y los vectores cotangentes o covectores a M en x, son tensores de tipo (0,1) en x o
1{formas en x.
La base natural del espacio tangente a una variedad en un punto x viene dada
por los vectores basicos
asociados a un sistema coordenado
alrededor
de x. As, si
@
@
1
n
U; ' (x ; : : : ; x ) es una carta local con x 2 U , @x1 ; : : : ; @xn es la base de
Tx(M) y dx1 ; : : : ; dxn la de Tx(M) asociadas a dicha carta. Un tensor K de tipo
(r; s) en x se tendra la siguiente expresion:
K = Kji11jirs @x@i1 @x@ir dxj1 dxjs :
Si V; (y1; : : : ; yn ) es otra carta alrededor de x, respecto a esta, K se expresara por:
K = K ji11jirs @y@i1 @y@ir dyj1 dyjs :
Por lo que la relacion entre ambas componentes viene dada, teniendo en cuenta
como es el cambio de base, por la siguiente relacion (ver pag. 57):
1
@yr @xj1 @xjs :
K 11sr = Kji11jirs @y
@xi1 @xir @y1 @ys
2.5 Fibrado tangente. Campos de vectores
Con objeto de estudiar la diferenciabilidad de tensores sobre una variedad diferenciable M introducimos nuevas variedades canonicamente asociadas a M y as
podemos interpretar cualquier tipo de tensor como aplicaciones de M en tales variedades.
Denicion 2.32 El conjunto
S T (M)
T (M) =
x
x2
se denomina brado tangente a la variedad M.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
70
2 Tensores y formas diferenciales sobre una variedad
Denimos la aplicacion canonica : T (M) ! M en la manera siguiente: si
v 2 T (M), v 2 Tx(M) para un solo x 2 M, entonces ponemos (v) = x.
Teorema 2.33 Sobre el brado tangente T (M) de una variedad M de dimension n
existe una estructura de variedad diferenciable de clase C 1 y de dimension
2n de forma tal que : T (M) ! M es una submersion.
Demostracion.- Sea (U ; ') 2 A un atlas sobre M. Para cada 2 A consideramos el subconjunto 1 (U ) T (M), y denimos
'e : 1 (U ) ! '(U ) IRn IR2n
v 7 ! 'e(v) = '((v)); v1 ; : : : ; vn = x1 ((v)); : : : ; xn ((v)); v1 ; : : : ; vn ;
donde (x1 ; : : : ; xn ) son las funciones coordenadas de (U ; ') y (v1 ; : : : ; vn) son las
componentes de v 2 T(v)(M) respecto a la base natural relativa a dicha carta; esto
n
X
es, v = vi @x@ i .
i=1
La coleccion de pares ( 1 (U); 'e ) 2 A verican las siguientes propiedades, que permiten denir una estructura diferenciable sobre T (M):
1) Para todo 2 A; 'e es biyectiva sobre su imagen.
2) Si (U ; ') y (U ; ' ) son dos cartas locales en M, tales que U \ U 6= ,
entonces 1 (U ) \ 1 (U ) 6= , y la composicion
'e 'e 1 : 'e 1 (U ) \ 1(U ) ! 'e ( 1 (U ) \ 1 (U )
es una aplicacion diferenciable; pues esta dada por
('e 'e 1)(1 ; : : : ; n; 1 ; : : : ; n ) =
0
1
n @
n @
X
X
= @(' ' 1)((1 ; : : : ; n));
(x1 )j ; : : : ;
(xn )j A ;
j
j
j =1 @x
j =1 @x
donde (1 ; : : : ; n ; 1; : : : n) 2 'e 1(U ) \ 1(U ) , ' (x1 ; : : : ; xn ) y v =
n
X
i @
i=1
@xi , y, por tanto
'e 'e 1 = (' ' 1) J (' ' 1);
donde J (' ' 1 ) : IRn ! IRn es la aplicacion diferenciable determinada por la
matriz Jacobiana de ' ' 1 .
3) La coleccion 'e 1(W ) 2 A y W conjunto abierto en IR2n constituye
base para la topolog
a de T (M). Para esta topologa en T (M) la familia
una
1
( (U ); 'e ) 2 A constituye un atlas para una estructura diferenciable de
dimension 2n sobre T (M).
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.5 Fibrado tangente. Campos de vectores
71
4) Con esta topologa es facil demostrar que T (M) es separado:
Sean v1; v2 2 T (M); v1 6= v2. Distinguiremos dos casos:
a) Si v1 2 Tx1 (M); v2 2 Tx2 (M), con x1 6= x2. Como M es separado, existen
U1; U2 abiertos disjuntos y x1 2 U1; x2 2 U2. Luego 1 (U1 ); 1 (U2 ) son abiertos
disjuntos de T (M) y v1 2 1 (U1 ); v2 2 1(U2 ).
b) Si v1; v2 2 Tx1 (M). Respecto a la carta (U; ') en M, 'e(v1 ) = (x; 1 ; : : : ; n),
'(v2) = (x; 1 ; : : : ; n). Como = (1 ; : : : ; n ), = (1; : : : ; n), 6= y IRn es
separado, existen abiertos disjuntos W1; W2 en IRn con 2 W1; 2 W2 . Luego
'e 1('(U ) W1), 'e 1('(U ) W2 ) son abiertos disjuntos en T (M) y se tiene que
v1 2 'e 1('(U ) W1 ), v2 2 'e 1('(U ) W2).
5) Si consideramos sobre T (M) la estructura de variedad diferenciable as denida, : T (M) ! M es trivialmente diferenciable y su aplicacion inducida es
sobreyectiva, se trata pues de una submersion.
Denicion 2.34 Un campo de vectores sobre una variedad diferenciable M, es una
aplicacion X : M ! T (M), tal que X = 1 .
As pues, dar un campo de vectores consiste en asignar a cada punto de la
variedad un vector tangente en dicho punto.
Dado X , campo de vectors sobre M, y f 2 F(M), funcion real diferenciables sobre
M, denimos la aplicacion
Xf : M ! IR
por
(Xf )(x) = X (x) f =: Xx (f ) 8x 2 M:
Si U; ' (x1 ; : : : ; xn ) es una carta local de M, denimos los campos de vectores
@
@
@xi : U ! T (U ), por @xi (x) 2 Tx (M), 8x 2 U ; estando dada sobre U la estructura
de variedad diferenciable inducida por la de M.
Proposicion 2.35 Un campo de vectores X : M ! T (M) es diferenciable si y solo
si 8f 2 F(M); Xf 2 F(M).
Demostracion.- Ya que la diferenciablidad tiene caracter local, basta con hacer
la demostracion en una carta (U; ') de funciones coordenadas (x1 ; : : : ; xn).
1) Supongamos que X : U ! T (U ) y f : U ! IR son diferenciables, probemos
que Xf 2 F(U ).
n
X
8x 2 U; Xx = Xxi @x@ i jx, siendo @x@ i i=1;:::;n los campos de vectores basicos
i=1
en U . Denimos las aplicaciones X i : U ! IR, por X i (x) = Xxi . Entonces
@ (f ' 1 ) n
n
X
X
@
i
i
' (x):
(Xf )(x) = Xx (f ) = X (x) @xi (f ) = X (x)
i
@r
j
x
i=1
i=1
As Xf es suma de productos de funciones diferenciables.
2) Recprocamente, la aplicacion X es diferenciable si lo es la aplicacion
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
72
2 Tensores y formas diferenciales sobre una variedad
'e X ' 1 : '(U ) ! '(U ) IRn; (x1 ; : : : ; xn ) 7 ! (x1 ; : : : ; xn; X 1 ; : : : ; X n);
la cual lo es al ser todas sus funciones componentes diferenciables.
Al conjunto de los campos de vectores diferenciables sobre M lo denotamos por
X(M) , el cual, con las operaciones siguientes, es un F(M){modulo:
(X + Y )x(f ) = Xx(f ) + Yx(f )
8X; Y 2 X(M); 8f; g 2 F(M); 8x 2 M:
(fX )x (g) = f (x)Xx (g)
En particular X(M) es un espacio vectorial sobre IR.
Si U es un abierto coordenado de M, con funciones coordenadas (x1 ; : : : ; xn), los
campos de vectores @x@ 1 ; : : : ; @x@n es una base de X(U ).
Se tienen unos ejemplos notables de subvariedades en el brado tangente T (M)
a una variedad diferenciable:
{ Si x 2 M, cada bra 1(x) = Tx (M) es una subvariedad regular de T (M), y
es una submersion.
{ Si X 2 X(M), X (M) es una subvariedad de T (M), pues X : M ! T (M) es una
inmersion inyectiva.
Algebra de Lie de los campos de vectores diferenciables sobre M
Si X; Y 2 X(M), denimos un producto en X(M), que denominaremos corchete,
por la relacion siguiente:
[X; Y ]x(f ) = Xx(Y f ) Yx(Xf ); 8f 2 F(M); 8x 2 M:
Se verican las siguientes propiedades:
1) [X; Y ] 2 X(M)
(Campo de vectores diferenciable)
2) [X; Y ] = [Y; X ]
(Anticonmutatividad)
3) [X + Y; Z ] = [X; Z ] + [Y; Z ]
(Bilinealidad respecto a la suma)
4) [X; Y ] = [X; Y ] = [X; Y ]
( " " al producto por un escalar)
5) [X; [Y; Z ]] + [Y; [Z; X ]] + [Z; [X; Y ]] = 0
(Identidad de Jacobi)
6) [fX; gY ] = fg[X; Y ] + f (Xg)Y g(Y f )X ,
para todo X; Y; Z 2 X(M); 8f; g 2 F(M); 2 IR.
Se deduce de ellas que X(M) es un algebra sobre IR, que por vericar las propiedades 2) y 5) (identidad de Jacobi) se denomina algebra de Lie de los campos de
vectores diferenciables sobre M.
i e Y i son las
Si X; Y 2 X(U ); U; ' (x1 ; : : : ; xn ) una carta local de M, y X
componentes de los campos X e Y en la base de campos de vectores @x@ 1 ; : : : ; @x@n ,
las funciones componentes de [X; Y ] 2 X(M) son
n X
i
[X; Y ] =
X k @x@ k (Y i)
k=1
Yk
@ (X i ) :
@xk
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.6 Fibrado cotangente. 1{formas diferenciales
73
2.6 Fibrado cotangente. 1{formas diferenciales
Denicion 2.36 El conjunto
T (M) =
S T (M)
x2 x
se denomina brado cotangente a la variedad M.
Es el conjunto de todos los covectores en todos los puntos de la variedad M. Se
tiene la proyeccion canonica : T (M) ! M denida como sigue: si ! 2 T (M),
entonces ! 2 Tx(M), para un unico x 2 M y ponemos (!) = x.
Teorema 2.37 Sobre el brado cotangente T (M) existe una estructura de variedad diferenciable de dimension 2n, de forma tal que la aplicacion proyeccion
: T (M) ! M es una submersion.
Demostracion.- Se procede de forma analoga que para el caso del brado tangente.
Tomando los homomorsmos coordenados a partir de las aplicaciones biyectivas 'e
denidas a continuacion:
Si f(U ; ')= 2 Ag es un atlas para la estructura diferenciable de M. Para cada
2 A, consideramos el subconjunto 1(U ) T (M) y las aplicaciones
'e : 1 (U) ! '(U ) IRn IR2n
denidas de la forma siguiente: si ! 2 1 (U ), entonces (!) 2 U ; y si (x1 ; : : : ; xn )
son las funciones coordenadas de la carta (U; '), fdx1; : : : ; dxn g es la base natural
n
X
de T(!) (M) y ! = !idxi , denimos
i=1
'e(!) = '((!)); !1 ; : : : ; !n :
El conjunto 'e; 1(U ) 2 A permite dar una estructura diferenciable
en T (M), respecto a la cual : T (M) ! M es una aplicacion diferenciable con
inducidad sobreyectiva.
Denicion 2.38 Una 1{forma diferencial sobre una variedad diferenciable M, es
una aplicacion ! : M ! T (M) tal que ! = 1 .
Dados un campo de vectores X y una 1{forma diferencial ! sobre M, denimos
la aplicacion
!(X ): M ! IR poniendo !(X ) (x) = !x(Xx ); 8x 2 M:
Si U; ' (x1 ; : : : ; xn ) es una carta local de M, denimos las 1{formas diferenciales dxi : U ! T (U ), por dxi (x) 2 Tx (M); 8x 2 U ; considerandose en U
la estructura diferenciable inducida por la de M. Se tiene de forma inmediata la
siguiente:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
74
2 Tensores y formas diferenciales sobre una variedad
Proposicion 2.39 Una 1{forma diferencial ! : M ! T (M) es diferenciable ,
(8X 2 X(M) ) !(X ) 2 F(M)).
Designaremos por 1 (M) el conjunto de todas las 1{formas diferenciales diferenciables sobre M.
1(M) constituye un F(M){modulo, deniendo la suma de 1{formas y el producto
por una funcion diferenciable de manera natural. En particular, 1 (M) es un espacio
vectorial real, no necesariamente de dimension nita.
Si (U; ') es una carta local con funciones coordenadas (x1 ; : : : ; xn), el conjunto
1
a generado
por las 1{formas diferenciables dxi (i = 1; : : : ; n); ademas
dx(U1 ;): :est
: ; dxn son independientes. Luego 1(U ) es un F(U ){modulo de dimension n.
Dada f 2 F(M), funcion real diferenciable, induce la 1{forma diferencial diferenciable denida como sigue
df : M ! T (M)
tal que para todo x 2 M, df (x) es la aplicacion lineal (ver pag. 26)
df (x): Tx(M) ! IR;
df (x)(v) = v(f ); 8v 2 Tx (M):
La diferenciabilidad de df surge de que en una carta local (U; ' (x1 ; : : : ; xn ))
se tiene
n @
X
df = @xi (f )dxi :
i=1
Dada una aplicacion diferenciable : M ! N entre dos variedades diferenciables, ella induce aplicaciones entre los brados tangentes y cotangentes de la forma
siguiente:
: T (M) ! T (N) v 2 T (M) 7 ! (v) 2 T (N)
de tal forma que si v 2 Tx(M), (v) es el elemento (x) v de T(x)(N) determinado
por la aplicacion inducida entre los espacios tangentes (x) : Tx (M) ! T(x)(N)
(Proposision 1.46).
Si ademas es biyectiva induce la aplicacion entre los brados cotangentes
: T ( N ) ! T ( M )
tal que si ! 2 T (N), existe un x 2 M y ! 2 T(x)(N); entonces (!) es el covector
en Tx (M) dado por la aplicacion lineal (ver pag. 27):
(!): Tx(M) ! IR
v 7 ! ! (x) v ; 8v 2 Tx(M):
Ejercicio.- Probar que si : M ! N es un difeomorsmo, las aplicaciones
inducidas : T (M) ! T (N) y : T (N) ! T (M) son diferenciables.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.7 Fibrado tensorial. Campos de tensores
75
2.7 Fibrado tensorial. Campos de tensores
Generalizemos ahora, de manera natural, los conceptos de brados tangentes y
cotagentes para el caso de tensores sonre una variedad.
Denicion 2.40 El conjunto
S (Nr T (M))
Tsr (M) =
s x
x2
se denomina brado tensorial a la variedad M.
Existe una proyeccion canonica : Tsr (M) ! M, tal que si K es un
N elemento de
r
Ts (M), entonces (K ) es el unico elemento x 2 M para el cual K 2 rs Tx(M).
Teorema 2.41 Sobre el brado tensorial Tsr (M) existe una estructura de variedad
diferenciable de dimension n+nr+s, de forma tal que la aplicacion proyeccion
: Tsr (M) ! M es una submersion.
Demostracion.- Se procede de forma analoga a la del caso de los brados tangente y cotangente. Tomando los homeomorsmos coordenados como las aplicaciones biyectivas 'e denidas, a partir de un atlas f(U ; ')g2A para la estructura
diferenciable de M, de la forma siguiente: Sobre el subconjunto 1 (U ) Tsr (M),
'e : 1(U ) ! '(U ) IRnr+s IRn+nr+s
esta denida como sigue: si K 2 1 (U ), entonces (K ) 2 U, y si (x1 ; : : : ; xn )
son las funciones coordenadas
(U; '),
o
n @ de la carta
@i dxj1 dxjs
i
@xr
N@x1
es la base natural de rs T(K) (M); por tanto
K = Kji11jirs @x@i1 @x@ir dxj1 dxjs ,
y por denicion ponemos
'e(K ) = ' (K ) ; Kji11jirs :
El conjunto ('e ; 1(U )) 2 A constituye un atlas para una estructura diferenciable en Tsr (M), para la cual : Tsr (M) ! M es diferenciable y su inducida es
sobreyectiva.
Denicion 2.42 Un campo tensorial de tipo (r; s) sobre una variedad diferenciable
M, esta dado por una aplicacion K : M ! Tsr (M), tal que K = 1 .
Dados s campos de vectores diferenciables, X1 ; : : : ; Xs 2 X(M) y r 1{formas diferenciables, !1; : : : ; !r 2 1 (M); denimos la funcion real, para cada campo tensorial
K de tipo (r; s) y para cada x 2 M, siguiente
K (X1; : : : ; Xs ; !1; : : : ; !r ): M ! IR
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
76
2 Tensores y formas diferenciales sobre una variedad
x 7 ! K (X1 ; : : : ; Xs; !1 ; : : : ; !r ) (x) = Kx X1 (x); : : : ; Xs (x); !1 (x); : : : ; !r (x) :
Si U; ' (x1 ; : : : ; xn) es una carta local de M, denimos los campos de tensores
de tipo (r; s) basicos
@ @ dxj1 dxjs : U ! T r (U )
s
@xi1
@xir
N
por @x@i1 jx @x@ir jx dxj1 jx dxjs jx 2 rs Tx(M); 8x 2 U ; donde en U
se considera la estructura diferenciable inducida por la de M.
Proposicion 2.43 Un campo tensorial de tipo (r,s), K : M ! Tsr (M) es diferenciable si y solo si 8X1; : : : ; Xs 2 X(M) y 8!1; : : : ; !r 2 1 (M) se tiene que
K (X1 ; : : : ; Xs; !1 ; : : : ; !r ) 2 F(M).
Por Trs (M) indicaremos el conjunto de todos los campos de tensores de tipo (r; s)
diferenciables sobre M.
Trs (M) constituye un F(M){modulo. Siendo T10 (M) = X(M) y T01 (M) = 1(M).
Si U; ' (x1 ; : : : ; xn) es una carta local de M, el conjunto Trs (U ) esta generado
por los campos de tensores basicos de tipo (r; s) @x@i1 @x@ir dxj1 dxjs
(1 i1; : : : ; ir ; j1; : : : ; js n); ademas estos campos tensoriales son independientes,
por lo que Trs (U ) es un F(U ){modulo de dimension nr+s .
Como se observa con claridad, es condicion necesaria y suciente para la diferenciabilidad de un campo de tensores K , dado el caracter local
de este concepto,
ir , sean
1
n
que sus componentes respecto a una carta U; ' (x ; : : : ; x ) en M, Kji11
js
diferenciables en U .
Daremos a continuacion otra interpretacion de campos de tensores de tipo (0; s)
y (1; s) segun el punto de vista de las Proposiciones 2.18 y 2.20. Antes necesitamos establecer los dos lemas siguientes: El primero es la version para funciones
diferenciables del Teorema de Tietze para aplicaciones continuas.
Lema 2.44 Sea M una variedad diferenciable, K un compacto contenido en un
abierto W de M. Entonces, existe sobre M una funcion diferenciable de clase
C 1 con valores comprendidos entre 0 y 1, igual a 1 sobre K y a 0 sobre
M W.
Demostracion.- Consideremos en primer lugar el caso en el que W este contenido
en un abierto coordenado de una carta local (U; '). Si la funcion buscada existe,
es de la forma f = g ' donde g es una funcion diferenciable en IRn, con soporte
(la clausura del conjunto de puntos donde g() 6= 0, sop(g) = f 2 IRn=g() 6= 0g)
compacto contenido en '(W ), y con valores comprendidos entre 0 y 1, igual a 1 sobre
el compacto A = '(K ), igual a 0 sobre IRn '(W ). La clausura A es compacta;
existe, entonces, un recubrimiento
nito de A por bolas Bi, cada una de las cuales
0
concentrica a una bola Bi '(W ).
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.7 Fibrado tensorial. Campos de tensores
77
Sean B = Bcn(a); B0 = Bcn (b) un par de estas bolas, de centro c y radios
a; b (a < b). Consideremos la funcion h : IR ! IR, denida por
( (1 1)
para
a<t<b
h(t) = e t b0 t a
para
1 < t a; b t < 1
h es positiva y diferenciable sobre IR. La funcion : IR ! IR
R t h(u) du
(t) = R +11
1 h(u) du
es positiva y diferenciable sobre IR, con valores comprendidos entre entre 0 y 1, igual
a 0 para t a, e igual a 1 para t b.
La aplicacion g : IRn ! IR denida por
g(x) = (r)
x 2 IRn; r = d(c; x)
es positiva, diferenciable y de valores comprendidos entre 0 y 1: igual a 0 en B, y a
1 en IRn B0 .
Si designamos por gi las aplicaciones as denidas para todo par de bolas Bi; Bi0 ,
la funcion
Y
g=1
gi
i
S
es positiva, diferenciable,
de valores comprendidos
entre 0 y 1,
igual aS1 sobre i Bi
T
S
S
n
n
0
0
0
e igual a 0 sobre i (IR Bi) = IR
i Bi . Como 'n(K ) i Bi y i Bi '(W ),
esta funcion es igual a 1 sobre '(K ), y a 0 sobre IR '(W ). Con lo que queda
demostrado el lema para el caso en que W este contenido en un abierto coordenado.
En el caso en que K sea un compacto contenido en abierto cualquiera W de M,
notemos que K admite un recubrimiento nito por compactos K , tales que cada
K esta contenido S
en un abierto
W de W , contenido en un abierto coordenado U,
S
de modo que K K y W W . Si designamos por f la funcion denida
por cada ndice , la funcion
Y
f =1
(1 f )
es positiva sobre toda
M, diferenciable, con valores conprendidos
0y
T (M entre
S Kla variedad
W
)
y
en
consecuencia
sobre
K
,
e
igual
a
0
sobre
1, igual
a
1
sobre
=
S
M W y por tanto sobre M W .
El segundo lema que necesitamos es el que expresa el caracter local del campo
de tensores K :
Lema 2.45 Si K 2 T0s (M); Xi 2 X(M); Yi 2 X(M) (i = 1; : : : ; s), tal que Xi = Yi
en un entorno abierto U de x 2 M, entonces
K (X1 ; : : : ; Xs ) = K (Y1; : : : ; Ys) en U:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
78
2 Tensores y formas diferenciales sobre una variedad
Demostracion.- Es suciente demostrar que si X1 = 0 en U , entonces tambien
se verica que K (X1 ; : : : ; Xs ) = 0 en U . Para y 2 U , el Lema 2.44, garantiza al
existencia de una funcion diferenciable f : M ! IR tal que f (y) = 0 y f 1 fuera de
U . Entonces X1 = fX1 y K (X1 ; : : : ; Xs) = fK (X1 ; : : : ; Xs ), que se anula en y.
Proposicion 2.46 Un campo de tensores de tipo (0,s) sobre M puede ser considerado como una aplicacion multilineal
K : X(M) s) X(M) ! F(M)
tal que
K (f1 X1; : : : ; fs Xs) = f1 fsK (X1 ; : : : ; Xs);
para fi 2 F(M) y Xi 2 X(M) (i = 1; : : : ; s):
Inversamente, una tal aplicacion puede ser considerada como un campo
de tensores de tipo (0,s).
Demostracion.- Dado un campo de tensores K de tipo (0; s), para cada punto
s)
x de M, Kx : Tx(M) Tx(M) ! IR es una aplicacion multilineal por la
Proposicion 2.18, y entonces
K : X(M) s) X(M) ! F(M)
(X1 ; : : : ; Xs ) 7 ! K (X1 ; : : : ; Xs ): M ! IR
x 7 ! Kx ((X1 )x; : : : ; (Xs )x )
satisface la condicion del enunciado.
Recprocamente, sea
K : X(M) s) X(M) ! F(M)
una aplicacion F(M){multilineal. Lo esencial en la demostracion es establecer que el
valor de la funcion K (X1 ; : : : ; Xs) en un punto x depende solo de los Xi en x. Esto
implicara que K induce una aplicacion multilineal de Tx(M) Tx(M) sobre IR
para cada x.
Tenemos que demostrar que si X1 se anula en un punto x, tambien se anula
K
). Sean x1 ; : : : ; xn funciones coordenadas alrededor del punto x y X1 =
P(nX1f; :i: :@;iX. sPodemos
tomar los campos de vectores Yi y las funciones diferenciables
i=1 @x
i = f i e Yi = @ i para i = 1; : : : ; n en algun entorno U de x. Entonces
tales que
g
@x
P
X1 = ni=1 giYi en U . Por el Lema 2.45, K (X1 ; : : : ; Xs ) = giK (Yi ; X2 ; : : : ; Xs ) en
U . Ya que gi(x) = f i (x) = 0 para i = 1; : : : ; n, as K (X1 ; : : : ; Xs) se anula en x.
Analogamente se demuestra el resultado para campos de tensores de tipo (1,s):
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.7 Fibrado tensorial. Campos de tensores
79
Proposicion 2.47 Un campo de tensores de tipo (1,s) sobre M puede ser considerado como una aplicacion multilineal
K : X(M) s) X(M) ! X(M)
tal que
K (f1 X1; : : : ; fs Xs) = f1 fs K (X1 ; : : : ; Xs );
para fi 2 F(M) y Xi 2 X(M) (i = 1; : : : ; s):
Inversamente, una tal aplicacion puede ser considerada como un campo
de tensores de tipo (1,s).
Sea : M ! N un difeomorsmo entre variedades diferenciables, para cada punto
x 2 M se tienen los isomorsmos lineales siguientes
(x) : Tx (M) ! T(x)(N);
t
(x) = (x) : T(x)(N) ! Tx (M);
1 ((x)) : Tx (M) ! T(x)(N):
Se dene entonces el siguiente isomorsmo
N
N
e(x): rs Tx (M) ! rs T(x)(N)
N
dado para Kx = v1 vr 1 s 2 rs Tx(M) por
e(Kx ) = (v1 ) (vr ) ( 1 ) (1 ) ( 1 ) (s );
y se extiende por linealidad, obteniendose as un isomorsmo de espacios vectoriales.
Tratamos ahora de asociar al difeomorsmo : M ! N un isomorsmo entre las
algebras T(M) y T(SN).X
Siendo
T(M) el conjunto de las aplicaciones diferenciables de
N
r
M en el brado
s Tx (M) que compuesta con la proyeccion canonica da
x2 r;s0
la identidad en M (tensores diferenciables de cualquier tipo sobre M).
Para ello empezamos deniendo las siguientes aplicaciones:
e : T00 (M) = F(M) ! T00(N) = F(N); e(f ) = f 1 ;
8f 2 T00(M)
8X 2 T10 (M)
e : T10 (M) = X(M) ! T10 (N) = X(N); e(X ) = X 1;
e : T01 (M) = 1 (M) ! T01(N) = 1(N); e(!) = ( 1 ) ! 1 ; 8! 2 T01 (M)
Las cuales se extendienden de modo natural a una unica aplicacion
e : T(M) ! T(N);
y se tiene el siguiente resultado, basandonos en la Proposicion 2.23
Proposicion 2.48 Todo difeomorsmo : M ! N induce un unico isomorsmo de
algebra e : T(M) ! T(N) que conserva el tipo tensorial y conmuta con la
contracion.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
80
2 Tensores y formas diferenciales sobre una variedad
2.8 Formas diferenciales
Consideremos en cada punto
V x 2 M, de una variedad diferenciable M de dimension n, el espacio vectorial k Tx (M), de dimension nk .
Denicion 2.49 Al conjunto
Vk M = S Vk T (M)
x2
x
se denomina brado de las k{formas de la variedad M.
V
Y se denota por : k M ! M la proyeccion canonica. Enunciamos, a continuacion resultados analogos a los que se tienen para los brados anteriormente
estudiados y de los cuales omitiremos su demostracion:
Teorema 2.50 Vk M tieneVuna estructura de variedad diferenciable de dimension
n + nk tal que : k M ! M es una submersion.
Denicion 2.51 Una k{forma diferencial sobre M a una aplicacion ! : M ! Vk M,
tal que ! = 1 .
Si ! es una k{forma diferencial y X1 ; : : : ; Xk 2 X(M) se considera la funcion
!(X1 ; : : : ; Xk ): M ! IR
x 2 M 7 ! (!(X1; : : : ; Xk )) (x) = !x (X1 (x); : : : ; Xk (x)) 2 IR:
Si U; ' (x1 ; : : : ; xn ) es una carta local en M, denimos las k{formas diferenV
V
ciables dxi1 ^ ^ dxik : U ! k U , por dxi1 jx ^ ^ dxik jx 2 k (Tx (M)).
Proposicion 2.52 Una k{forma diferencial ! : M ! Vk M es diferenciable si y solo
si 8X1; : : : ; Xk 2 X(M) se tiene que !(X1; : : : ; Xk ) es diferenciable.
Representaremos por k (M) el conjunto de todas las k{formas diferenciables
sobre M.
Cada k (M) es un F(M){modulo y si U es un abierto coordenado k (U ) es un
F(U )-modulo de dimension nita igual a nk .
Si consideramos el espacio brado de todas las formas diferenciables sobre una
n V
X
S
k T (M); sobre el conjunto (M) de todas las formas diferenciavariedad:
x
x2 k=0
les diferenciables (es decir, de todas las aplicaciones diferenciales de M en tal brado
que compuestas con la proyeccion canonica dan la identidad en M), se puede denir
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.8 Formas diferenciales
81
una estructura de algebra, con las operaciones suma de formas del mismo grado,
multiplicacion por un escalar y con un producto dado por
( ^ )(x) = (x) ^ (x);
2 p(M); 2 q (M);
obteniendose as una (p + q){forma. El algebra as obtenida se denomina algebra
de Grassmann o algebra exterior de una variedad diferenciable M, y se suele denotar
tambien por G (M) .
Sean M y N variedades diferenciables y : M ! N una aplicacion diferenciable.
Entonces induce una aplicacion entre las algebras de Grassmann respectivas:
: G (N) ! G (M), denida como sigue:
f = f ;
8f 2 0(N) F(N)
( !)x (X1 (x); : : : ; Xk (x)) = !(x) ( (X1 (x)); : : : ; (Xk (x)))
8! 2 k (N) (k 0); x 2 M; X1 ; : : : ; Xk 2 X(M):
Es claro que si f y ! son diferenciables tambien lo son f y !.
Finalmente se extiende a todo (N) por linealidad.
Las propiedades siguientes son faciles de establecer:
1.
2.
aplica k{formas sobre k{formas: : k (N) ! k (M).
es un homomorsmo de algebras; es decir, es lineal y
( ^ ) = ^ 8; 2 (N):
3. Si f 2 F(N), entonces d( f ) = (df ).
4. Si ! 2 k (N) se expresa localmente, respecto a una carta U; ' (x1 ; : : : ; xn ) ,
por
! = ai1 ik dxi1 ^ ^ dxik
entonces
! = (ai1 ik )d(xi1 ) ^ ^ d(xik ):
5. (1 ) = 1
( ) .
6. ( ) = ,
donde : M ! N y : N ! P son aplicaciones
diferenciables entre variedades.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
82
2 Tensores y formas diferenciales sobre una variedad
2.9 Diferencial exterior
Teorema 2.53 Sea M una variedad diferenciable, existe una unica aplicacion lineal
d : (M) ! (M)
llamada la diferencial exterior, tal que cumple las propiedades siguientes:
1.
2.
3.
4.
d : k (M) ! k+1(M).
d(f ) = df (diferencial ordinaria), f 2 0(M) F(M).
d( ^ ) = (d) ^ + ( 1)k ^ d; 2 k (M); 2 (M).
d2 = d d = 0.
Para la demostracion necesitamos el siguiente Lema 2.54 que arma que para
todo operador diferencial exterior d, (d!)(x) depende solo del valor de ! en un
entorno abierto de x.
Lema 2.54 Sea d : (M) ! (M) lineal y satisfaciendo las condiciones del teorema.
Supongamos que ! 2 (M) es tal que !jW = 0 para algun conjunto abierto
W M. Entonces (d!)jW = 0.
As, si !; 2 (M) son tales que !jW = jW , entonces (d!)jW = (d )jW .
Demostracion.- Supongamos que !jW = 0. Sea x0 2 W y f 2 F(M) tal que
f (x0 ) = 1 y f (x) = 0; 8x 62 W (ver Lema 2.44). Entonces f! es identicamente nula
en M, as que
0 = d(f!) = (df ) ^ ! + fd!:
Evaluando en x0 , resulta (d!)(x0 ) = 0. Ya que esto se tiene para todo x0 2 W ,
d!jW = 0.
Si !jW = jW , entonces (! )jW = (d! d )jW = 0 y (d!)jW = (d )jW .
Demostracion del Teorema.- Unicidad: Supongamos que d : (M) ! (M)
satisface las condiciones del teorema. Sea x 2 M, U; ' (x1 ; : : : ; xn ) una carta
alrededor de x y ! 2 k (M). Entonces la restriccion de ! a U se expresa por:
! jU =
X
1i1 <<ik n
ai1 ik dxi1 ^ ^ dxik ;
ai1 ik 2 F(U ):
Ahora bien, el termino de la derecha de esta ecuacion no es una forma diferencial
sobre M, por tanto no le podemos aplicar el operador d. No obstante, sea U1 un
abierto conteniendo a x con U1 compacto y U1 U , y sea (en virtud del Lema 2.44)
g 2 F(M) tal que g(x) = 1; 8x 2 U1; g(x) = 0; 8x 62 U .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.9 Diferencial exterior
Entonces
!e =
83
X
(gai1 ik )d(gxi1 ) ^ ^ d(gxik ) 2 k (M)
1i1 <<ik n
entendiendo los producto de funciones de la formula, gh, para h 2 F(U ), como sigue
(gh)(x) =
g(x)h(x)
x2U
x 62 U
0
Ademas se tiene, !ejU1 = !jU1 . Y, por el Lema 2.54, se sigue que (d!e)jU1 =
(d!)jU1 .
Si ahora calculamos su diferencial
d!e =
=
1i1 <<ik n
X
1i1 <<ik n
+
=
X
X
d gai1ik d(gxi1 ) ^ ^ d(gxik )
d(gai1 ik ) ^ d(gxi1 ) ^ ^ d(gxik ) +
1i1 <<ik n
X
1i1 <<ik n
gai1 ik d
d(gxi1 ) ^ ^ d(gxik ) =
d(gai1 ik ) ^ d(gxi1 ) ^ ^ d(gxik ):
En particular, ya que g es identicamente 1 en U1 y ya que (d!e )jU1 = (d!)jU1 ,
(d!)jU1 =
X
n @
X
j
i1
ik
@xj (ai1 ik )dx ^ dx ^ ^ dx :
1i1 <<ik n j =1
As, si d existe, su valor en x sobre k{formas debe estar dado por esta formula.
Ya que x es arbitrario en M y que toda forma diferencial es suma de k{formas,
k 2 f0; 1; : : : ; ng, la unicidad queda establecida.
Existencia: Primeramente denimos d localmente. Sea U; ' (x1 ; : : : ; xn) una
carta en M, denimos
dU : (U ) ! (U )
como sigue, para
!=
X
1i1 <<ik n
dU ! =
X
ai1 ik dxi1 ^ ^ dxik ;
ai1 ik 2 F(U )
n @
X
j
i1
ik
@xj (ai1 ik )dx ^ dx ^ ^ dx :
1i1 <<ik n j =1
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
84
2 Tensores y formas diferenciales sobre una variedad
Extendemos dU a (U ) por linealidad.
Las propiedades (1) y (2) se satisfacen claramente.
Para vericar (3) y (4), notemos primero que cada forma en (U ) es suma de
formas de tipo
adxi1 ^ ^ dxik :
Por la linealidad de d, junto con la distributividad de la multiplicacion respecto
a la suma, es suciente comprobar (3) y (4) sobre formas de este tipo:
(3) Supongamos
= adxi1 ^ ^ dxik ;
= bdxj1 ^ ^ dxj` :
Entonces
d( ^ ) = d(ab dxi1 ^ ^ dxik ^ dxj1 ^ ^ dxj` ) =
n @
X
@
r
i1
ik
j1
j`
=
r (a)b + a @xr (b) dx ^ dx ^ ^ dx ^ dx ^ ^ dx =
@x
r=1
!
n @
X
r ^ dxi1 ^ ^ dxik ^ b dxj1 ^ ^ dxj` +
=
(
a
)
dx
r
r=1 @x
!
n @
X
r
j1
j` =
+( 1)k a dxi1 ^ ^ dxik ^
r (b)dx ^ dx ^ ^ dx
@x
r=1
k
= (d) ^ + ( 1) ^ d:
(4) Para ! = a dxi1 ^ ^ dxik
!
n @
X
r ^ dxi1 ^ ^ dxik =
(
a
)
dx
d2 ! = d
r
r=1 @x
n @ @
X
s ^ dxr ^ dxi1 ^ ^ dxik = 0
=
(
a
)
dx
s
r
r;s=1 @x @x
pues los terminos en esta expresion con r = s son nulos, ya que dxr ^ dxr = 0.
Ademas para r 6= s, la igualdad de las derivadas parciales mixtas sobre IRn, implica
que
@ @ a = @ @ a;
@xs @xr @xr @xs
as que
@ @ a dxs ^ dxr = @ @ a dxr ^ dxs;
@xs @xr
@xr @xs
con lo que los restantes terminos se cancelan.
As el operador dU tiene las propiedades (1) { (4).
Por la unicidad, todo operador lineal sobre (M) cumpliendo estas propiedades
debe estar dado por la formula recuadrada.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.9 Diferencial exterior
85
En particular, si U1 es un subconjunto abierto de U , entonces (U1; 'jU1 ) es un
sistema coordenado de M y dU1 : (U1) ! (U1 ) esta dado en el sistema coordenado
'jU1 por la misma formula. As, si ! 2 (M), entonces
dU1 (wjU1 ) = dU (!jU ) jU1 :
Esta relacion nos permite denir d globalmente por
(dw)jU = dU (!jU );
para todo ! 2 (M) y todo entorno coordenado U .
Este d esta bien denido puesto que si U y V son dos entornos coordenados que
se solapan, entonces
dU (!jU ) jU \V = dU \V (!jU \V ) = dV (!jV ) jU \V :
As, d tiene las propiedades requeridas, ya que dU las tiene para cada U .
Proposicion 2.55 El operador diferencial exterior sobre dos variedades diferenciables M y N conmuta con la aplicacion inducida entre sus algebras de
Grassmann por la aplicacion diferenciable F : M ! N; es decir,
F d = dF
esto es, 8k 0, el diagrama siguiente es conmutativo:
F
k N
-
k M
d
d
F
?
k+1N
-
?
k+1M
Demostracion.- Debido a las propiedades de F , linealidad y comportamiento
respecto al producto exterior (F ( ^ ) = (F ) ^ (F )), y al caracter local y
linealidad del operador d, basta vericar la igualdad del enunciado solamente para
los elementos de grado 0 y 1.
1) Si f 2 0(N) F(N), v 2 Tx (M):
(d F )(f ) (v) = d(f F ) (v) = v(f F ) = F (v) (f ) =
= df F (v) = F (df ) (v) = (F d)(f ) (v):
2) Si df 2 1(N)
(d F )(df ) = d F (df ) = d d(F f ) = (d d)(F f ) = 0
(F d)(df ) = F (d d)(f ) = 0:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
86
2 Tensores y formas diferenciales sobre una variedad
Proposicion 2.56 Sea ! 2 1(M) y X; Y 2 X(M), entonces tenemos la formula
siguiente
d!(X; Y ) = 12 X!(Y ) Y !(X ) !([X; Y ]) :
Demostracion.- Es suciente probar
esta relacion localmente. En una carta
n
X
U; ' (x1 ; : : : ; xn ) , se tiene ! = ai dxi y es facil demostrar que la ecuacion
i=1
del enunciado se verica para todo !, si se verica para un ! de la forma f dg, donde
f y g son funciones diferenciables en U . Supongamos, por tanto, que ! = f dg, y
sean X; Y campos de vectores diferenciables. Evaluando ambos miembros de la
ecuacion por separado se obtiene
d!(X; Y ) = (df ^ dg)(X; Y ) =
= 1 df (X )dg(Y ) df (Y )dg(X ) =
2
1
= 2 (Xf )(Y g) (Xg)(Y f )
X!(Y ) Y !(X ) !([X; Y ]) = X (f dg(Y )) Y (f dg(X )) f dg([X; Y ]) =
= X (f (Y g)) Y (f (Xg)) f (X (Y g) Y (Xg))
= (Xf )(Y g) (Xg)(Y f ):
2.10 Formas cerradas y exactas. Cohomologa de De Rham
Denicion 2.57 Una forma diferencial sobre una variedad diferenciable M se
dice que es cerrada si d = 0; y se dice que es exacta si existe una forma tal que = d .
Claramente toda forma exacta es cerrada, ya que d2 = 0; mientras que el inverso
no es cierto; es decir, dada una k{forma cerrada, no existe en general una (k 1){
forma cuya diferencial sea la dada.
Ejemplo 2.58 Sea M un abierto de IR2 y = 1 dx + 2 dy, con 1 y 2 funciones
diferenciables en M, entonces
2 = @1
d = 0 , @
@x @y
se deduce que si es cerrada, existe localmente una funcion f tal que = df .
Ejemplo 2.59 La forma en M = IR2 f(0; 0)g
+ x dy
= yxdx
2 + y2
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.10 Formas cerradas y exactas. Cohomologa de De Rham
87
es cerrada pero no exacta. Aunque podemos poner = d(arctag xy ), arctag xy no es
una funcion unvocamente denida en en IR2 f(0; 0)g.
El hecho de que una forma cerrada sea tambien exacta esta estrechamente ligado
a la topologa de la variedad. De hecho se puede caracterizar a traves de su cohomologa. A tal n vamos a estudiar la cohomologa en la variedad denida haciendo
uso del operador diferencial exterior.
Representaremos por
n
.
o
Z k (M; d) = ! 2 k (M) d! = 0 ;
Bk (M; d) =
n
.
! 2 k (M)
9 2 k 1(M);
o
! = d :
En terminos del operador diferencial exterior, dk : k (M) ! k+1(M), estos conjuntos son respectivamente el nucleo de dk , Ker dk , y la imagen de dk 1,
Im dk 1 = dk 1(
k 1 (M)); y, por consiguiente, son ambos subgrupos del grupo aditivo k (M), y se tiene que Bk (M; d) Z k (M; d), lo que nos permite dar la siguiente
denicion:
Denicion 2.60 El grupo cociente
k M; d)
H k (M; d) = ZBk ((M
; d)
se denomina k{esimo grupo de cohomologa de de Rham de la variedad M.
Aunque los grupos de cohomologa son denidos en terminos de la estructura
diferenciable de la variedad M, ellos son invariantes topologicos; esto es, si dos variedades son homeomorfas (pero no necesariamente difeomorfas), entonces sus grupos
de cohomologa son isomorfos, de hecho estos grupos pueden ser denidos directamente usando solo la estructura topologica de M.
Ejemplo 2.61 Sea M una variedad diferenciable conexa. Entonces
H 0(M; d) = IR:
En efecto; comencemos por observar que, puesto que no existen formas diferenciales de grado negativo, B0(M; d) 0.
Por tanto
H 0 (M; d) = Z 0 (M; d) = ff 2 F(M) df = 0g:
Observemos ahora que, si U; ' (x1 ; : : : ; xn ) es una carta coordenada en M,
n
X
df = @x@ i (f )dxi = 0 en U signica que @x@ i (f ) = 0; 8i 2 f1; 2; : : : ; ng, pero esto
i=1
signica trivialmente que f es constante sobre U ; puesto que M es conexa y f es
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
88
2 Tensores y formas diferenciales sobre una variedad
constante sobre cada entorno coordenado en M, necesariamnete f debe ser constante
sobre todo M; en consecuencia
Z 0(M; d) = ff 2 F(M) f = cteg = IR:
Si M no es conexa y tiene p componentes conexas, entonces H 0 (M; d) = IRp.
Ejemplo 2.62 La circunferencia unidad S1 = f(x; y) 2 IR2 x2 + y2 = 1g es una va IR. Ahora probemos
riedad diferenciable de dimension 1 y conexa, luego H 0 (S1; d) =
que tambien
H 1(S1 ; d) = IR:
En efecto; comencemos por observar que, puesto que no existen formas diferenciales de grado dos sobre S1 no nulas se tiene
Z 1(S1 ; d) = 1(S1):
Por otra parte,
B1(S1; d) = fdf f 2 F(S1 )g:
Representemos por la funcion coordenada natural sobre S1, funcion coordenada
polar; asociada a ella tenemos el campo de vectores @@ no nulo sobre S1 y la 1{forma
dual d (1). Ahora sea ! 2 1(S1); entonces, puesto que 1(S1 ) es de dimension 1,
sera
! = g() d
para una funcion diferenciable g; consideremos la 1{forma una diferencial sobre S1
dada por
! c d
para c 2 IR denido por
Z 2
1
g() d:
c = 2
0
Armamos que ! c d es exacta; en efecto, denimos f : S1 ! IR por
f ( ) =
Z
0
(g() c)d
y, puesto que f ( + 2n) = f (); 8n 2 Z , f esta bien denida y f 2 F(S1 ). Ademas
df = (g() c)d = ! c d;
por tanto, ! c d es una 1{forma diferencial exacta. As
1 1
H 1(S1 ; d) = ZB1((SS1 ;; dd)) = IR:
= fc d c 2 IRg <Ojo con la notacion! d no es la diferencial de la funcion , puesto que es una funcion
diferencial denida tan solo localmente.
(1)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.10 Formas cerradas y exactas. Cohomologa de De Rham
89
En los ejemplos anteriores hemos visto ya que los grupos de cohomologa de de
Rham son, en general, no triviales. Nuestro proposito inmediato es ver que bajo
circunstancias especiales, esos grupos son triviales.
De hecho vamos a probar que
H k (IRn; d) = 0; 8k > 0:
Observemos que puesto que IRn es trivialmente difeomorfo a B0n(1), la bola
abierta en IRn de centro en el origen y de radio unidad, probaremos, en su lugar lo
que se conoce como el Teorema de Poincare, esto es, que
H k (B0n(1); d) = 0; 8k > 0:
Para ello, utilizaremos el siguiente lema:
Lema 2.63 Sea M una variedad diferenciable; para cada k 1, consideremos
k 1 (M) d! k (M) d! k+1(M)
y supongamos que existan aplicaciones lineales
hj : j+1 (M) ! j (M); j = k 1; k
tal que
Entonces
hk d + d hk 1 = 1
k (M ):
H k (M; d) = 0:
Demostracion.- Debemos probar que toda k{forma diferencial cerrada es exacta.
Sea, pues ! 2 k (M) con d! = 0. Entonces
! = (hk d + d hk 1)! = hk (d!) + d(hk 1!) = d(hk 1!);
por tanto, ! es una forma exacta.
Proposicion 2.64 (Teorema de Poincare)
H k (B0n (1); d) = 0; 8k > 0:
Demostracion.- De acuerdo con el lema anterior nos bastara construir aplicaciones lineales hk 1; hk satisfaciendo las condiciones de dicho lema. Ademas puesto
que estas aplicaciones han de ser lineales, nos bastara denir hk 1 sobre formas
diferenciales ! = g dxi1 ^ ^ dxik , y analogamente para hk .
As, para un tal !, denimos
!
Z1
hk 1 (!)(x) =
tk 1g(tx)dt 0
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
90
2 Tensores y formas diferenciales sobre una variedad
donde
= xi1 dxi2 ^ ^ dxik xi2 dxi1 ^ dxi3 ^ ^ dxik + +( 1)k 1 xik dxi1 ^ ^ dxik
1
Es claro que
d = kdxi1 ^ ^ dxik
La aplicacion hk se dene de forma analoga reemplazando k por k + 1.
Ahora, para ! = g dxi1 ^ ^ dxik 2 k (B01 (1)) y x 2 B0n(1), se tiene
(d hk 1)(!)(x) = d
Z 1
0
!
tk 1 g(tx)dt =
!
!
Z1
Z1
@
k
1
j
k
1
t g(tx) dt dx ^ +
t g(tx) dt d =
= @xj
0
0
j =1
!
!
Z1
n Z1
X
@
n
X
tk 1 @xj g(tx) dt dxj ^ +
tk 1 g(tx) dt d =
0
j =1 0
!
!
Z
Z
n
1
X 1 k @g
t @xj (tx)dt dxj ^ + k
=
tk 1g(tx) dt dxi1 ^ ^ dxik
0
j =1 0
=
Analogamente
(hk d)(!)(x) =
=
1
0n
X @g j i1
ik A =
hk @ @x
j dx ^ dx ^ ^ dx
j =1
!
n Z 1 @g
X
j =1
0
tk @xj (tx)dt (xj dxi1 ^ ^ dxik dxj ^ ):
Por tanto:
(d hk 1 + 0
hk d)(!)(x) =
!1
@g (tx)dt A dxi1 ^ ^ dxik =
tk xj @x
= @k
tk 1 g(tx)dt +
j
0
j =1 0
!
Z 1
d
=
ktk 1g(tx) + tk dt g(tx) dt dxi1 ^ ^ dxik =
0
!
Z1d
tk g(tx) dt dxi1 ^ ^ dxik =
=
Z1
! X
n Z1
dt
0
k
= t g(tx) 1 dxi1 ^ ^ dxik = g(x) dxi1 ^ ^ dxik = !(x):
0
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
2.10 Formas cerradas y exactas. Cohomologa de De Rham
91
Nota 2.65 Este resultado es valido en cualquier abierto U estrellado respecto a uno
de sus puntos p, es decir, tal que el segmento de recta que une cualquiera de sus
puntos con p esta enteramente contenido en U . Por lo que podemos reenunciar el
Lema de Poincare de la siguiente forma:
Proposicion 2.66 Sea M IRn un abierto estrellado respecto a uno de sus puntos,
entonces toda forma cerrada sobre M es exacta.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
92
2 Tensores y formas diferenciales sobre una variedad
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Sistemas diferenciales
Teorema de Frobenius
3.1 Curvas integrales y campos de vectores
Sea M una variedad diferenciable de dimension n. Una curva diferenciable en
M (ver Nota 1.51) es una aplicacion diferenciable : I IR ! M de un intervalo
abierto de IR en M. Si (I; 1I ) es la carta identidad en I y si dtd es el correspondiente
campo de vectores basico en I , el vector tangente a en t 2 I , denotado por _ (t),
esta denido por
d _ (t) = dt :
jt
Consideremos ahora X 2 X(M), un campo de vectores diferenciable sobre M.
Denicion 3.1 Una curva integral del campo de vectores X es una curva diferenciable :]a; b[! M tal que el vector tangente a en cada punto es el
representante de X en ese punto; es decir,
_ (t) = X(t); 8t 2 ]a; b[:
Supongamos que es una curva en M con dominio I . Elegimos una carta
U; ' (x1 ; : : : ; xn) en M cuyo abierto coordenado intersecta a (I ). Entonces
la i{esima componente de _ relativamente a la base f @x@ 1 ; : : : ; @x@n g es
d d
i
i
dx (_ ) = dx ( dt ) = ( dt ) (xi ) = dtd (xi );
con lo que
n d
X
_ = dt (xi ) @x@ i :
i=1
Si respecto a la carta (U; ') el campo de vectores X se expresa por
X=
n
X
i=1
X i @x@ i ;
93
94
3 Sistemas diferenciales. Teorema de Frobenius
entonces es una curva integral de X si y solo si
d(xi ) = X i (i = 1; : : : ; n):
(3.1)
dt
Por tanto, para hallar las curvas integrales de un campo de vectores X en un
entorno coordenado U de la variedad M nos bastara resolver el sistema de ecuaciones
diferenciables (3.1). Para la existencia de soluciones de tal sistema nos bastara
utilizar los teoremas clasicos de la teora de sistemas de ecuaciones diferenciales
ordinarias de primer orden.
Ejemplo 3.2 Consideremos
el campo de vectores en IR2 denido en terminos de la
2
carta identidad (IR ; 1IR2 ) de funciones coordenadas (x1 ; x2 ), por
X = x1 @x@ 1 + x2 @x@ 2 :
Una curva : IR ! IR2 es una curva integral de X si y solo si
d(x1 ) = x1 d(x2 ) = x2 :
dt
dt
Se sigue que las componentes de la aplicacion que dene la curva son
1(t) = aet ;
A
A
6
a
AK
HH
A
YH
H
*
HHA )
HA (a; b
H
A
AHH
HH
jH
A
H
AU
? A
A
Fig. 3.1:
2(t) = bet :
Por consiguiente, existe una curva integral con dominio IR
: IR ! IR2
t 7 ! (aet ; bet )
partiendo de un punto dado (a; b) de IR2 .
Notese que la curva integral partiendo
de (0,0) es constante, esto es debido a que
el campo de vectores X es nulo en (0; 0).
A tal punto se le llama punto crtico del
campo de vectores.
Ya que existe una curva integral con
dominio IR partiendo de cualquier punto,
este campo de vectores se dice que es completo.
Ejemplo 3.3 Consideremos
el campo de vectores en IR2 denido en terminos de la
2
carta identidad (IR ; 1IR2 ) de funciones coordenadas (x1 ; x2 ) por
X=e
x1
@ :
@x1
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
3.1 Curvas integrales y campos de vectores
95
Una curva = ( 1; 2) es una curva integral de X si y solo si
d 1 = e 1
dt
Se sigue que existe una curva integral
d 2 = 0:
dt
(t) = (ln (t + ea); b);
pasando por un punto (a; b) de IR2, cuyo dominio es el intervalo abierto ] ea; 1[
de IR.
Este campo de vectores no tiene puntos crticos y es no completo.
(0,0,1)
(x,y,z)
(y1,y2)
(x1,x2)
(0,0,-1)
Fig. 3.2: Proyeccion estereograca
Ejemplo 3.4 Supongamos que en la esfera unidad S2, (U; ') y (V; ) son las cartas
con dominios U = S2 f(0; 0; 1)g y V = S2 f(0; 0; 1)g del atlas estereograco en
S2. Los homeomorsmos coordenados estan denidos (ver Fig. 3.2) por
' : U ! IR2
: V ! IR2
1
2
(x; y; z) 7 ! (x ; x )
(x; y; z) 7 ! (y1 ; y2 ):
Consideremos el campo de vectores en S2, denido por los campos de vectores
(x1 x2 ) @x@ 1 + (x1 + x2) @x@ 2
( y1 y2 ) @y@ 1 + (y1 y2) @y@ 2
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
96
3 Sistemas diferenciales. Teorema de Frobenius
en U y V respectivamente, los cuales coinciden en U \ V; y juntos denen un campo
de vectores X en S2, con los puntos (0; 0; 1) crticos. Todo esto surge del hecho de
que se verica
1
x1 = x2 =
y1 y2 (y1 )2 + (y2 )2
y, por tanto,
@x1 = @x2 = (y2 )2 (y1 )2
@y1
@y2 (y1 )2 + (y2 )2 2
@x1 = @x2 =
2y1 y2 :
@y2 @y1 (y1 )2 + (y2 )2 2
Las curvas integrales estan denidas por las ecuaciones
d 1 = 1 2;
d 2 = 1 + 2;
dt
dt
cuya solucion es
(t) = ' 1(a cos(t + b)et ; a sen(t + b)et );
donde los numeros reales a y b estan determinados unvocamnete por la condicion
de que (0) sea un punto de U \ V .
Ya que el dominio de cada curva integral es IR, el campo de vectores X es
completo.
La representacion graca de la proyeccion ' de una curva integral no constante
desde el punto (0; 0; 1) sobre el plano z = 0 es una espiral.
3.2 Grupo unipametrico de transformaciones
Denicion 3.5 Una transformacion de una variedad diferenciable M es un difeomorsmo de M en s mismo.
Denicion 3.6 Un grupo uniparametrico de transformaciones de M es una aplicacion
diferenciable
: IR M ! M
vericando:
1) 8t 2 IR, la aplicacion t : M ! M dada por t(x) = (t; x), es una
transformacion de M.
2) 8x 2 M, la aplicacion diferenciable x : IR ! M dada por x(t) =
(t; x), verica x(0) = x.
3) 8s; t 2 IR se verica s t = s+t.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
3.2 Grupo unipametrico de transformaciones
97
Procedemos, a continuacion, a asociar a cada campo de vectores X sobre una
variedad diferenciable M, un grupo uniparametrico de transformaciones . Para lo
cual dado un punto x 2 M y un numero real t sucientemente proximo al cero,
denimos
:] "; "[M ! M
poniendo (t; x) = (t), donde es una curva integral de X pasando por x 2 M,
(0) = x.
Por la dependencia de las soluciones de una ecuacion diferencial de las condiciones
iniciales, segun los teoremas relativos a esta teora, se llega a demostrar que las aplicaciones verican las condiciones necesarias para denir un grupo uniparametrico.
Recprocamente, dado un grupo uniparametrico : IR M ! M de transformaciones de M, denimos un campo de vectores sobre M, tomando como representante, en un punto x 2 M, el vector tangente a la curva en M que pasa por x:
= x : IR ! M; x(t) = (t; x).
Mas precisamente:
Proposicion 3.7 Todo grupo uniparametrico de transformaciones de M dene
un campo de vectores diferenciable X 2 X(M).
Demostracion.- Sea X : M ! T (M) campo de vectores dado por Xx 2 Tx(M),
vector determinado por
Xx(f ) = d(fdtx) j0;
8f 2 F(M):
El campo de vectores X es tal que sus curvas integrales son precisamente las
curvas x para todo x 2 M. Se dice entonces que el campo de vectores X es el
generador del grupo uniparametrico o que este es generado por X .
A partir de la denicion del campo de vectores X , vamos a obtener otra expresion
de dicho campo.
d(f x) = lim 1 (f )(t) (f )(0) = lim 1 f ((t; x)) f (x) =
x
x
t7!0 t
t7!0 t
dt j0
1 (f )(x) f (x) = lim 1 ( (f ))(x) f (x):
= tlim
t
7!0 t
t7!0 t t
Luego
1 (( (f ))(x) f (x)) :
Xx (f ) = tlim
7!0 t t
Probemos ahora el resultado recproco (local) del anterior:
Proposicion 3.8 Sea
X 2 X(M). Para cada punto x 2 M, existen un abierto U de
x, un " 2 IR+ f0g y una unica aplicacion diferenciable
: ] "; "[ U ! M
tal que
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
98
3 Sistemas diferenciales. Teorema de Frobenius
1. 8t 2] "; "[, t : U ! M, dada por t(x) = (t; x), es un difeomorsmo
de U sobre su imagen Ut = t(U ).
2. 8s; t 2] "; "[, tal que s + t 2] "; "[ y s(U ) U , se tiene
t s = s+t:
3. El grupo uniparametrico local ftg induce sobre U el campo de vectores
X dado.
Demostracion.- Vamos a demostrar primeramente la existencia y unicidad de .
Todo punto x 2 M esta contenido en un abierto coordenado W y tiene coordenadas
locales (x1 ; : : : ; xn ). Si X 1; : : : ; X n son las componentes de X e (y1 ; : : : ; yn ) son las
coordenadas locales del punto x(t), se debe tener:
dyi = X i (y1 ; : : : ; yn )
(3.2)
dt
yi (0; x1 ; : : : ; xn ) = xi :
(3.3)
Estas ecuaciones expresan que las funciones y1; : : : ; yn de t; x1 ; : : : ; xn son solucion del sistema diferencial (3.2) tomando para t = 0 los valores (x1 ; : : : ; xn).
Se sabe que el sistema diferencial (3.2) admite bajo las condiciones de regularidad clasicas concernientes a las funciones X i , para t sucientemente peque~no, una
solucion local diferenciable y solo una, que depende diferenciablemente de las condiciones iniciales x1 ; : : : ; xn . Mas exactamente, existe un numero > 0, un entorno
abierto V de x contenido en W y una unica aplicacion diferenciable
: I V ! M
tal que (0; x) = x, para todo x 2 V . La unicidad de esta aplicacion debe entenderse
en el sentido siguiente: si :] 0 ; 0 [V 0 ! M es otra solucion, entonces y
coinciden sobre la interseccion (I V ) \ (I0 V 0 ).
1.- Se tiene
@yi
det @xj (0; x) = 1:
La matriz jacobiana de la transformacion es regular en un entorno de x. Se puede
pues elegir " y U para que t sea un difeomorsmo de U en t(U ).
2.- t es un grupo local de un parametro. En efecto, la aplicacion
t 7 ! (t; (s; x))
es la solucion del sistema diferencial (3.2) que se reduce para t = 0 a (s; x). Como
el segundo termino de (3.2) no depende de t, la aplicacion
t 7 ! (s + t; x)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
3.2 Grupo unipametrico de transformaciones
99
es entonces una solucion que se reduce para t = 0 a (s; x). En virtud de la unicidad,
se deduce que si s; t son sucientemente peque~nos para que (s; x) 2 U si x 2 U , se
tiene
(t; (s; x)) = (s + t; x);
es decir
t s = s+t:
Finalmente de que (0; x) = x, se sigue que 0 es la transformacion identidad;
luego t admite una transformacion inversa t 1 = t .
3.- t induce sobre U el campo de vectores X dado, pues para todo x 2 U :
dyi (0; x) = X i (x):
dt
De esta proposicion se deduce que todo campo de vectores genera un grupo local
uniparametrico en M, pero en general el grupo as obtenido no puede prolongarse
a todo t 2 IR.
Denicion 3.9 Se denomina soporte de un campo de vectores X a la clausura del
conjunto de puntos de M en los cuales X no es nulo.
Proposicion 3.10 Sea X 2 X(M) con soporte compacto, entonces X genera un
grupo uniparametrico global de transformaciones de M.
Demostracion.- Designemos por K el soporte de X ; al ser M Hausdor y K
compacto, existe un recubrimiento nito de K por compactos K contenido en un
abierto U del tipo de la proposicion anterior; es decir
S K K U A conjunto nito:
K=
2A
Sea para cada 2 A
:] " ; " [U ! M
el grupo local uniparametrico correspondiente.
Tomando " = minf" = 2 Ag, denimos la aplicacion
(t; x) si x 2 K
:] "; "[M ! M (t; x) = x
si x 2 M K
es una solucion del sistema diferencial (3.2), diferenciable y t es una transformacion de M, 8t 2] "; "[. Ademas para s; t 2] "; "[ con s + t 2] "; "[,
s+t = s t.
Nos falta probar que se puede denir t para cualquier t " o t ". En efecto,
si t " ponemos t = k "2 + r con krk < 2" , y denimos
t = 2" k) 2" r = k"2 r :
Si t ", procedemos de forma analoga usando 2" .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
100
3 Sistemas diferenciales. Teorema de Frobenius
Tx(M)
Tx(M)
Yx
Xx
x
Yφt (x)
Xφt (x)
(φ-t)*(Yφ (x))
Yx
φt(x)
XY
M
Fig. 3.3: Derivada de Lie
Corolario 3.11 Si M es una variedad compacta todo X 2 X(M) genera un grupo
uniparametrico de transformaciones de M. Es decir, X es un campo de
vectores completo.
Demostracion.- Basta observar que el soporte de X es un cerrado en un compacto,
luego es compacto.
3.3 Derivada de Lie
Si X 2 X(M), ftgt es su grupo uniparametrico asociado y f 2 F(M),
d d (f ) =
(f ) = dt
Xx(f ) = (x) dt
x
j0
j0
1 ((f )(t) (f )(0)) = lim 1 ( (f ))(x) f (x)) :
= tlim
x
x
!0 t
t!0 t t
Denicion 3.12 Sean X; Y 2 X(M), la derivada de Lie de Y respecto a X es el
campo de vectores dado por
=
1 ( ) (Y ) Y = lim 1 (Y ( ) (Y
)
(LX Y )(x) = tlim
t
x
x
t
(
x
)
(
x
)
t
t
t!0 t
!0 t
= d
( t ) (Yt (x)) :
dt jt=0
Proposicion 3.13 Sean X; Y 2 X(M), se tiene LX Y = [X; Y ]:
Para su demostracion necesitamos los siguientes lemas:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
3.3 Derivada de Lie
101
Lema 3.14 Si f : I" M ! IR es una funcion diferenciable, con I" =] "; "[ IR
y f (0; x) = 0; 8x 2 M. Entonces, existe una funcion diferenciable g :
I" M ! IR, tal que 8t 2 IR y 8x 2 M
f (t; x) = t g (t; x)
g (0; x) = @f
@t j(0;x):
))
Demostracion.- Pongamos g (t; x) = f ((t;x
t .
f (t; x) @f (t; x)
g (0; x) = tlim
!0
t = @t jt=0:
Lema 3.15 Sean X 2 X(M), t su grupo uniparametrico y f : M ! IR una funcion
diferenciable. Existe entonces una aplicacion diferenciable g : I" M ! IR
tal que, si ponemos gt(x) = g(t; x), se tiene:
f t = f + tgt ;
g0 = Xf:
Demostracion.- Consideremos la funcion f: I" M ! IR, denida por f (t; x) =
f (t (x)) f (x). En virtud del Lema 3.14, existe una funcion diferenciable g :
I" M ! IR tal que
1) f (t; x) = (f t)(x) f (x) = tg (t; x) es decir, f t = f + tgt:
2)
lim
t!0
f (t; x) f (0; x)
=
!0
@t j(0;x) = tlim
t
g (0; x) = g (x) = @ f
0
f t (x) f (x) f 0(x) f (x)
t
f t(x) f (x)
= tlim
= Xx(f ):
!0
t
Demostracion de la Proposicion.- Si f 2 F(M):
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
102
3 Sistemas diferenciales. Teorema de Frobenius
(LX Y )xf =
=
=
=
=
=
=
=
=
=
1
(t ) Y x (f ) =
lim Y
t!0 t x
1 Y f ( ) Y f =
lim
t x
t!0 t x
1 Y f Y 1 (f ) =
lim
t
t (x)
t!0 t x
1 Y f Y 1 (f + tg ) =
lim
t
t (x)
t!0 t x
1 Y f Y 1 f t(Y 1 g ) =
lim
t (x)
t (x) t
t!0 t x
1 Y f Y 1 f lim Y 1 g =
lim
t (x)
t!0 t x
t!0 t (x) t
1 (Y f ((Y f ) )(x)) Y g =
lim
t
x 0
t!0 t x
1 Y f (Y f ) (x) Y g =
lim
x 0
t
t!0 t x
1 (Y f ) (Y f ) Y g =
lim
x 0
x
t
x
t!0 t
Xx(Y f ) Yx(Xf ):
Interpretacion geometrica del producto corchete
Proposicion 3.16 Sean F : M ! M una transformacion de M y X 2 X(M) un
campo de vectores que genera un grupo uniparametrico (local) de transformaciones ftg, entonces el campo de vectores F X genera el grupo uniparametrico (local) fF t F 1 g.
Demostracion.-
(F X )x (f ) = XF 1 (x)(f F ) =
1
1
1
(t (f F ) (F (x)) (f F )(F (x)) =
= tlim
!0 t
1 (f F F 1 )(x) f (x) =
= tlim
t
!0 t
1 (F F 1 ) (f )(x) f (x) :
= tlim
t
!0 t
Corolario 3.17 Sean F : M ! M una transformacion de M y X 2 X(M) un
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
3.3 Derivada de Lie
103
campo de vectores diferenciable, entonces X es invariante por F si y solo si
F t = t F .
Proposicion 3.18 Sean X; Y 2 X(M), generando los grupos locales uniparemetricos ft g; f t g respectivamente. Las armaciones siguientes son equivalentes:
1) t s = s t
2)
[X; Y ] = 0
Demostracion.- Si t s = s t entonces, por el corolario anterior, (s) Y =
Y ; y, por tanto, LX Y = [X; Y ] = 0.
Veamos ahora que la armacion 2) implica la 1):
0 = (s) [X; Y ] = [(s) X; (s ) Y ] = [X; (s ) Y ] = LX ((s ) Y ) =
1 ( ) ( ) Y ( ) Y = lim 1 (( ) Y ( ) Y ) = d(t) Y ;
lim
t s
s
s
t!0 t s+t t!0 t
dt jt=s
luego, (t) Y = (0 ) Y = Y y, por el corolario anterior, resulta s t = t s .
Para obtener la interpretacion geometrica buscada basta observar que lo que
[X; Y ] diere de cero mide lo que s t s t diere de la identidad en M. As,
recordando que para un punto x 2 M, arbitrario, t (x) y s (x) denen las curvas
integrales de X e Y por esos puntos respectivamente y la variacion de t a partir de
cero describe dichas curvas (ver Fig. 3.4):
ψ b(φa(x))
Trazamos la curva t(x) para 0 t a; por
a(x) trazamos la curva s (a)) para 0 s b;
por t (a(x)) trazamos la curva t( b (a))) para
a t 0; por a( b (a(x))) trazamos la
φ (x)
curva s ( a( b (a(x)))) para b s 0. El
ψ (φ (ψ (φ (x)))
corchete [X; Y ] mide lo que le falta al cuadrilatero
curvilneo as obtenido sobre la variedad para llex
gar a cerrarse de nuevo en el punto x de partida.
Fig. 3.4:
Pasamos ahora a denir la derivada de Lie de un campo de tensores y en particular de formas diferenciales. Sea X 2 X(M) y supongamos, para simplicar, que
genera un grupo uniparametrico de transformaciones global t sobre M (en caso de
que el campo X no sea completo es necesario hacer las restricciones oportunas en
los conjuntos de denicion de las transformaciones t ).
Para cada t 2 IR, consideremos el automorsmo et del algebra tensorial T(M)
(ver Proposicion 2.48) que induce t ; es decir:
N
N
et : rs Tt 1 (x)(M) ! rs Tx(M)
φ-a(ψ b(φa(x)))
a
-b
-a
b
a
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
104
3 Sistemas diferenciales. Teorema de Frobenius
denida por
et(K ) = (t ) (v1 ) (t ) (vr ) (t 1) (1 ) (t 1 ) (s )
N
si
K = v1 vr 1 s 2 rs Tt 1(x)(M):
Para K 2 T(M), ponemos
1 K (e K ) :
(LX K )x = tlim
t x
7!0 t x
Proposicion 3.19 La derivada de Lie de campos de tensores sobre una variedad
diferenciable M, respecto a un campo de vectores X 2 X(M) satisface a las
siguientes propiedades:
1.
2.
3.
4.
5.
6.
Es IR{lineal.
LX (S T ) = (LX S ) T + S LX T; 8S; T 2 T(M).
LX conserva el tipo tensorial: LX (Trs (M)) Trs (M).
LX conmuta con toda contracion.
LX f = Xf 8f 2 F(M).
LX Y = [X; Y ] 8X 2 X(M).
Por vericar las propiedades 1), 2), 3) y 4) se dice que la derivada de Lie es una
derivacion sobre el agebra tensorial T(M).
Demostracion.- 1) Por la propia denicion y las propiedades del lim, es inmediato que LX es IR{lineal.
2) Si S; T son dos campos de tensores arbitrarios
1 S T e (S T ) = lim 1 S T (e S ) (e T ) =
LX (S T ) = tlim
t
t
t
7!0 t
t7!0 t
1
1
e
e
e
e
= tlim
t S ) (t T ) =
7!0 t S T (t S ) T + tlim
7!0 t (t S ) T (
1 e et S ) 1 (T etT ) =
= tlim
S
S
T
+
lim
(
t
7!0 t
t7!0
t
= (LX S ) T + S (LX T ):
3) y 4) Ya que et conserva el tipo tensorial y conmuta con la contraccion
(Proposicion 2.48), tambien LX tiene tales propiedades.
Las propiedades 5) y 6) ya han sido establecidas anteriormente.
Para el caso particular de considerar solamente tensores covariantes antisimetricos, es decir, formas diferenciables, tenemos la siguiente denicion de derivada de
Lie:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
3.4 Sistemas diferenciables. Variedades integrales
105
Denicion 3.20 Para ! 2 (M) y X 2 X(M)
= lim 1 (! ) ! :
1 ! (!
)
(LX !)x = tlim
x
x
(
x
)
t
t
t7!0 t t t (x)
7!0 t
Proposicion 3.21 La derivada del Lie LX de formas diferenciales sobre una variedad M, respecto a un campo de vectores X 2 X(M), verica las siguientes
propiedades, para 8; 2 (M); 8 2 IR; 8f 2 F(M):
1) Conserva el grado de las formas: LX (
k (M)) k (M).
2) LX es IR{lineal:
LX ( + ) = LX + LX LX () = LX .
3) LX ( ^ ) = (LX ) ^ + ^ (LX ).
4) LX conmuta con la diferencial exterior: LX d = d LX .
5) LX f = Xf .
6) LX (df ) = d(Xf ).
Por vericar las tres primeras propiedades se dice que LX es una derivacion de
grado 0 sobre el algebra (M).
Demostracion.- Ya que casi todas estas propiedades ya estan demostradas para
tensores en general, solo estableceremos la propiedad 4). Usando 2) y 3), nos bastara
demostrar que LX d = d LX sobre funciones y diferenciales de funciones.
1 ((df ) ) (df ) =
(LX d)(f ) = LX (df ) = tlim
x
t (x)
7!0 t t
1 ((d( f )) (df ) ) = d lim 1 (( f ) f (x)) = d(L f ):
= tlim
x
t x
X
7!0 t
t7!0 t t x
(LX d)(df ) = LX (d2 f ) = 0: (d LX )(df ) = (d LX d)(f ) = (d2 LX )(f ) = 0:
3.4 Sistemas diferenciables. Variedades integrales
El concepto de campos de vectores en una variedad diferenciable puede ser usado
para dar un tratamiento libre de coordenadas de ciertas ecuaciones diferenciables en
derivadas parciales lineales de primer orden el cual es util para cuestiones locales en
IRn e indispensable en muchas cuestiones globales. Comenzaremos con un ejemplo.
Ejemplo 3.22 Sea
F (x1 ; x2 ; x3 ; y1; y2 ; pk` ) = 0;
= 1; 2; : : : ; 6
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
106
3 Sistemas diferenciales. Teorema de Frobenius
un sistema de seis ecuaciones diferenciales en derivadas parciales conteniendo dos
funcionesk incognitas y1 e y2 de tres variables x1 ; x2 ; x3 y sus primeras derivadas
simplicacion supondremos que estas ecuaciones pueden ser resueltas
pk` = @y
@x` . Por
k
respecto a p` y escribir equivalentemente
@yk = Gk (x; y); k = 1; 2; ` = 1; 2; 3:
`
@x`
en algun entorno U de un punto (a; b) = (a1 ; a2 ; a3 ; b1; b2 ). Una solucion consta de
funciones yk = f k (x1 ; x2 ; x3 ), k = 1; 2, que sastisface al sistema de ecuaciones
@f k = Gk x; f 1 (x); f 2 (x)
`
@x`
en un entorno x = a y para el cual f (a) = b. Estas vienen a ser las condiciones
iniciales. Esto es equivalente a denir una subvariedad tridimensional de IR5 =
IR3 IR2 dada por
x = (x1 ; x2 ; x3) 7 ! x1; x2 ; x3 ; f 1 (x); f 2 (x)
cuyo plano tangente en un punto (x; y) esta generado por tres campos de vectores
X1 ; X2 ; X3, con componentes dadas por
X1 = 1; 0; 0; G11(x; y); G21 (x; y) ;
X2 = 0; 1; 0; G12(x; y); G22 (x; y) ;
X3 = 0; 0; 1; G13(x; y); G23 (x; y) :
Una tal \supercie" da una solucion; la condicion inicial a~nade el requerimiento
de pasar por (a; b).
Tal solucion puede no existir: las ecuaciones deben satisfacer ciertas condiciones
necesarias relativas a las funciones Gkl las cuales reejan el hecho que si existe una
solucion, entonces se puede intercambiar el orden de derivacion de f 1 y f 2 . Estas
condiciones pueden ser escritas mediante relaciones entre Xi y [Xi ; Xj ], i; j = 1; 2; 3.
Los campos de vectores X1 ; X2 ; X3 , estan determinados por un sistema y denen
en cada punto q de U un subespacio tridimensional Eq Tq (IR5), siempre que
ellos sean independientes, lo cual supondremos. As un sistema de ecuaciones del
tipo que estamos considerando determina en algun dominio de IR5 tres campos de
vectores linealmente independientes X1 ; X2; X3 y una solucion es una subvariedad
tridimensional cuyo espacio tangente en cada uno de sus puntos q esta generado por
X1 ; X2 ; X3.
Dos sistemas de ecuaciones diferenciales seran equivalentes si ellos determinan
en cada punto q de sus dominios el mismo subespacio tridimensional Eq de Tq (IR5)
en cuyo caso tales sistemas tendran la misma solucion.
Un sistema de ecuaciones es completamente integrable si existe una unica variedad solucion a traves de cada punto de algun dominio de IR5 ; esto es, si el dominio,
salvo difeomorsmo, es semejante a un subconjunto abierto de IR5 representado
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
3.4 Sistemas diferenciables. Variedades integrales
107
como union de \supercies"disjuntas, tales supercies son obtenidas dejando dos
coordenadas jas y tomando las otras tres como variables. De todo esto surgen las
siguientes deniciones.
Denicion 3.23 Sea M una variedad diferenciable de dimension n y r un entero
tal que r n. Un sistema diferencial (o distribucion) r{dimensional en M es
una ley que a cada punto x 2 M asigna un subespacio r{dimensional Ex del
espacio tangente Tx(M)
E : x 7 ! Ex Tx(M):
Diremos que una distribucion E es diferenciable si la siguiente condicion
se satisface: Existe un entorno U de x y r{campos de vectores X1 ; : : : ; Xr
denidos y diferenciables en U , tal que para todo y 2 U los vectores
X1 (y); : : : ; Xr (y) forman una base de Ey .
El conjunto fX1 ; : : : ; Xr g se dice que es una base local de la distribucion
alrededor del punto x.
Un campo de vectores X en M se dice que pertenece a la distribucion E
(X 2 E ) si para todo x 2 M; Xx 2 Ex.
Se dice que una distribucion E es involutiva si existe una base local
fX1: : : : ; Xr g de la distribucion en un entorno de cada punto tal que
[Xi ; Xj ] =
r
X
k=1
ckij Xk
1 i; j r:
donde las ckij son funciones diferenciables en dicho entorno.
Una variedad integral de una distribucion diferenciable E en M es una
subvariedad (N; ) de M tal que 8y 2 N; (Ty (N)) E (y) .
Ejemplo 3.24 Sea M =@ IRr IRn r y el sistema diferencial E generado por los campos de vectores Xi = @xi ; i = 1; : : : ; r, entonces Ex es el subespacio de dimension
r que consta de todos los vectores paralelos a IRr en el punto x 2 M. Veremos que
este ejemplo aparentemente especial es tpico de distribuciones involutivas.
Denicion 3.25 Se dice que una distribucion diferenciable E es completamente
integrable si forallx 2 M existe una carta local U; ' (x1 ; : : : ; xn ) ; x 2 U
tal que los r{campos de vectores @x@ i ; i = 1; : : : ; r constituyen una base local
en U de E . Se dice entonces que (U; ') es un sistema coordenado adaptado
a la distribucion.
Notese que en este caso existe una variedad integral r{dimensional N pasando por
cada punto y 2 U , tal que Ty (N) = Ey , esto es, el espacio tangente a N es exactamente
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
108
3 Sistemas diferenciales. Teorema de Frobenius
E . En efecto, si (a1 ; : : : ; an) son las coordenadas de y, entonces la variedad integral
pasando por y es el conjunto de puntos cuyas coordenadas satisfacen
xr+1 = ar+1; : : : ; xn = an ;
esto es N = ' 1 2 '(U ) j = aj ; j = r + 1; : : : ; n , es una placa de U . De
hecho, en este caso la distribucion es involutiva pues
@ @
1 i; j n:
@xi ; @xj = 0
Podemos concluir que:
Proposicion 3.26 Toda distribucion completamente integrable es involutiva.
Ahora bien, no todas las distribuciones son involutivas, por ejemplo, en IR3 la
distribucion
@ + @; X = @ + @
X1 = z @x
2 @y @z
@z
@ , que no es combinacion de X1 y X2 . Esto
no es involutiva, ya que [X1; X2 ] = @x
signica que X1 ; X2, no pueden ser tangentes a una supercie z = f (x; y).
Una distribucion E de dimension 1 es un campo de rectas, esto es, de subespacios
unidimensionales. Una base local esta dada por un campo de vectores no nulo X
que pertenece a E en cada punto y; de hecho, una curva integral de X es una
variedad integral. Sabemos por el teorema de existencia (ver pag. 94), que tal
variedad, pasando por un punto arbitrario dado, existe y es unica. De hecho, la
proposicion que vamos a establecer a continuacion demuestra que tal distribucion es
completamente integrable. Ella es tambien involutiva ya que [X; X ] = 0.
Proposicion 3.27 Toda distribucion diferenciable E de dimension 1 sobre una variedad diferenciable M es completamente integrable.
Esta proposicion es consecuencia inmediata del siguiente lema:
Lema 3.28 Sea X un campo de vectores denido y diferenciable en un entorno
abierto de un punto x0 2 M, y tal que Xx0 6= 0. Entonces
existe un sistema
coordenado cubico centrado en x0 ; U; ' (y1 ; : : : ; yn ) en el que X esta
denido y coincide con @y@ 1 .
Demostracion.- Podemos encontrar U1; '1 (z1 ; : : : ; zn ) , un sistema coordenado cubico de lado " centrado en x0 , es decir '1(U1) = C0n(") y '1(x0 ) = 0, en el
que X esta denido, es diferenciable y ademas Xx0 z1 6= 0.
Si x 2 U1 se tiene Xx zi = F i z1 (x); : : : ; zn(x) ; 1 i n, donde las F i :
n
C0 (") ! IR son aplicaciones diferenciables, denidas por
F i = Xzi '1 1:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
3.5 Teorema de Frobenius
109
Consideremos el siguiente sistema de ecuaciones diferenciales:
di = F i(1 ; : : : ; n) (1 = 1; : : : ; n):
(3.4)
dt
Haciendo uso del teorema de existencia para sistemas de ecuaciones diferenciales,
existe una aplicacion diferenciable H : C0n() IRn ! IRn con 0 < < " tal que:
1) 8 2 C0n(); H () 2 C0n(").
2) Las ecuaciones
i = H i (t; 2; : : : ; n) (i = 1; : : : ; n)
expresan una solucion del sistema (3.4), con las condiciones iniciales
H 1 (0; 2 ; : : : :n) = 0 H i (0; 2 ; : : : ; n) = i (i 2):
Probemos que el jacobiano J (H ) de H es no nulo en 0 2 IRn. En efecto, los
terminos de la matriz jacobiana de H en 0 son
@H 1 = @1 = F 1(0; : : : ; 0) = X z1 6= 0:
x0
@r1 j0 @t j0
@H i = i :
@rj j0 j
Luego J (H )0 = Xx0 z1 6= 0.
As H : C0n() ! IRn dene un difeomorsmo en un entorno W del origen:
H : W C0n() ! H (W ) C0n("). Se sigue que existe un sistema coordenado
U; ' (y1 ; : : : ; yn ) alrededor de x0, siendo U = '1 1 H (W ) y ' = H 1 '1jU . Y
se tiene:
i
@ (H i ') = @ (zi ):
=
Xxzi = F i '1(x) = F i H ('(x) = @H
1
@r j'(x) @y1 jx
@y1 jx
Se tiene, en consecuencia:
X = @y@ 1 en U:
3.5 Teorema de Frobenius
Pasamos ahora a demostrar la integrabilidad de un sistema diferencial involutivo
arbitrario.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
110
3 Sistemas diferenciales. Teorema de Frobenius
M
U
.x0
U1
ϕ
ϕ1
IRn
IRn
H(W)
H
C0n(ε)=ϕ1(U1)
C0n(δ)
W
Fig. 3.5: Sistema de coordenadas adaptado a un campo de vectores
Teorema 3.29 (Frobenius) Sea E una distribucion r{dimensional e involutiva
en una variedad diferenciable M de dimension n. Para cualquier punto
x0 2 M, existe un sistema coordenado U; ' (x1 ; : : : ; xn ) cubico de lado
" y centrado en el origen, alrededor de x0 , tal que la placa de U denida
por las ecuaciones:
xr+h = r+h jr+h j < " (1 h n r)
es una variedad integral de E .
Y si (N; ) es una variedad integral conexa de E tal que (N) U ,
entonces (N) esta en una de estas placas.
Demostracion.- Sea fX1; : : : ; Xr g una base local de x0 . Tenemos (X1 )x0 6= 0, y
podemos aplicar el lema anterior a X1:
Existe un sistema coordenado U1 ; '1 (y1 ; : : : ; yn) al rededor de x0, cubico
y centrado en el origen, es decir, '1(x0 ) = 0 y '1(U1 ) = C0n(), tal que para todo
x 2 U1 se tiene @y@ 1 jx = (X1 )x .
Para r = 1 la placa de U1 que esta denida por las ecuaciones
y2 = 2; : : : ; yn = n
@
es una variedad integral N1 de E ya que Ex = f(^
X1 )jxg = f^
@y1 jx g = Tx (N1 ), con lo
que se prueba el Teorema para el caso r = 1.
Para probar el Teorema en el caso general procedemos por induccion en r. Supongamos que r > 1 y que el Teorema se verica para distribuciones de dimension
r 1.
Consideremos el conjunto de los campos de vectores denidos en U1:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
3.5 Teorema de Frobenius
111
Y1 = X1
Yi = Xi Xi (y1 )X1 ; 2 i r:
Se tiene que Yiy1 = Xi y1 (Xi y1)(X1 y1 ) = Xi y1 (Xi y1 )( @y@ 1 y1) = 0; i 2.
Los campos de vectores Y1; : : : ; Yr son independientes, ya que en las ecuaciones
de transformacion
0 Y 1 0 1 0 0 10 X 1
1
1 1 0 C B .1 C
B
X
y
B
C
.
2
B
@ .. A = @ C
A @ .. A ;
Xr
Yr
Xr y1 0 1
el determinante de la matriz es no nulo.
Con lo que (Y1)x ; : : : ; (Yr )x generan Ex, 8x 2 U1 . Ademas como las funciones
Xi y1 : U1 ! IR; 2 i r, son diferenciables, se sigue que los campos Yi son
diferenciables en U1 .
Sea S la placa de U1 denida por la ecuacion
y1 = 0
y sea Zi = YijS ; 2 i r (o lo que es igual i (Zi ) = Yi ; i : S ,! M); es
claro que los Zi son campos de vectores en S , pues Ziy1 = 0; 2 i r; esto es,
Zi (x) 2 Tx(S ); 8x 2 S . Por tanto, fZ2; : : : ; Zr g generan una distribucion en S de
dimension r 1.
El espacio E~x generado por los vectores Z2(x); : : : ; Zr (x); x 2 S , es la interseccion de Ex con el espacio tangente a S en x. As la distribusion E~ : x 7 ! E~x es
diferenciable en S . Probemos que es involutiva:
Los Zj verican i (Zj ) = Yj ; por consiguiente los correspondientes corchetes
tambien verican i ([Zi ; Zj ]) = [Yi ; Yj ]; 2 i; j r. Pero [Yi; Yj ]; 2 i; j r, no
tienen componentes en la direccion de Y1 , ya que, por hipotesis,
[Yi; Yj ] =
r
X
k=1
ckij Yk ;
y al aplicar a y1 .
[Yi; Yj ](y1 ) = Yi(Yj!y1) Yj (Yi y1 ) = 0
r
X
ckij Yk (y1 ) = c1ij
k=1
con lo que
i ([Zi ; Zj ]) = [Yi ; Yj ] =
r
X
k=2
ckij Yk =
r
X
k=2
9
>
= 1
=) c = 0; i; j 2;
>
; ij
ckij i (Zk ) = i
r
X
!
(ckij i)Zk ;
k=2
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
112
3 Sistemas diferenciales. Teorema de Frobenius
y al ser i inyectiva, resulta
[Zi ; Zj ] =
r
X
k=2
ckij jS Zk :
Con lo que queda probado que la distribucion E~ en S es involutiva.
Ya que E~ es de dimension r 1 podemos aplicar la hipotesis de induccion:
Podemos encontrar un sistema de coordenadas '2 (z2 ; : : : ; zn) alrededor de x0
en S , tal que la placa denida por las ecuaciones
zi = 0; r + 1 i n
es precisamente la variedad integral de la distribucion E~ generada por f @z@ 2 ; : : : ; @z@r g
en este entorno y que pasa por x0 .
M
S
U1
U2
ϕ2
IR
IRn-r
IRr-1
Fig. 3.6:
Consideremos las funciones
x1 = y1
xj = zj (2 j n);
donde : U1 ! S es la proyeccion natural del sistema de coordenadas (y1 ; : : : ; yn),
esto es:
xj (x) = (zj ) '1 1 y1 (x); : : : ; yn(x) = zj '1 1 0; y2 (x); : : : ; yn(x) ;
que estan denidas en un entorno de x0 2 U1 y son independientes, ya que
1 0
0
j 0
j
@z
@x
@zj = i 6= 0;
@yi jx0 1i;jn = ...
@y
i jx0
j
x
@y
0
2i;j n
2i;j n
0
y ademas
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
3.5 Teorema de Frobenius
113
x1 (x0 ) = y1 (x0 ) = 0
i 1
1
1
n
i
i
x (x0 ) = (z ) '1 y (x0 ); : : : ; y (x0 ) = z '1 (0; 0; : : : ; 0) = zi (x0 ) = 0:
As, existe un sistema de coordenadas U; ' (x1 ; : : : ; xn ) , U U1, cubico
centrado en x0 .
Ahora, con objeto de probar que los r campos de vectores Y1; : : : ; Yr es combinacion lineal de los campos de vectores @x@ 1 ; : : : ; @x@ r , bastara probar que Yixr+j = 0,
para todo i = 2; : : : ; r y todo j = 1; 2; : : : ; n r, puesto que Yi xr+j nos da las componentes de Yi respecto de la base f @x@ 1 ; : : : ; @x@n g.
Para ello, se tiene
@ (Y xr+j ) = Y (Y xr+j ):
1 i
@x1 i
Y, teniendo en cuenta que Y1xr+j = @x@ 1 (xr+j ) = 0, se sigue que
@ (Y xr+j ) = Y (Y xr+j ) Y (Y xr+j ) = [Y ; Y ]xr+j :
1 i
i 1
1 i
@x1 i
Es decir
r
@ (Y xr+j ) = X
ck1i(Yk xr+j ):
@x1 i
k=2
2
Fijada una placa en U de la forma x = 2; : : : ; xn = n. Sobre ella, Yi(xr+j ) es
una funcion de x1 solamente; as, tenemos un sistema de r 1 ecuaciones diferenciales
lineales homogeneas con las condiciones iniciales
(Yi xr+j ) ' 1(0; 2 ; : : : ; n ) = Zi (zr+j )
que da la componente de Zi en la direccion de @z@r+j ; pero en S \ U , fZ2; : : : ; Zr g
forman una base tal que se escriben solamente en combinacion de @z@2 ; : : : ; @z@r , luego
Zi zr+j = 0.
As, Yixr+j es identicamente nula, en virtud de la unicidad de la solucion.
Por tanto, los r campos de vectores Y1; : : : ; Yr se expresan en combinacion lineal
de los r campos de vectores @x@ 1 ; : : : ; @x@ r de la referencia natural f @x@ i g1in, asociada a las coordenadas locales (x1 ; : : : ; xn ). Con lo que f @x@ 1 ; : : : ; @x@ r g constituye
una base local de E en x0 y as la subvariedad denida por las ecuaciones
xk = 0
k>r
es una variedad integral de E .
Finalmente, supongamos que (N; ) es una variedad integral conexa de E , tal
que (N) U . Sea : IRn ! IRn la proyeccion en las n r ultimas coordenadas.
Entonces todo vector en E es anulado por ( ') . As, ( ' ) (y) = 0; 8y 2 N.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
114
3 Sistemas diferenciales. Teorema de Frobenius
Luego ' es una aplicacion constante ya que N es conexa. Y (N) esta contenida
en la placa dada, ya que ' = cte, implica que
( ' )(x) = ( ')( (x)) = 0; : : : ; 0; xr+1 ( (x)); : : : ; xn( (x))
o sea, 8y 2 (N), se tiene que
xr+j (y) = cte;
1 j n r:
3.6 Segunda forma del Teorema de Frobenius
Sea E un sistema diferenciable de dimension r: E : x 7 ! Ex sobre una variedad
diferenciable M de dimension n.
Consideremos el subespacio vectorial de Tx (M) de dimension n r
Ex0 = f!x 2 Tx (M) !x(Xx ) = 0; 8Xx 2 Exg;
denominado subespacio ortogonal a Ex.
La aplicacion E 0 : x 7 ! Ex0 es diferenciable: Como la distribucion E es diferenciable, existen en un entorno de cada punto campos de vectores diferenciables X1 ; : : : ; Xr tales que sus representantes forman una base de los subespacios
Ex; completemosla (1) para formar una base de Tx(M), fX1 ; : : : ; Xr ; Xr+1 ; : : : ; Xn g.
Consideremos la base de 1{formas duales f!1; : : : ; !r ; !r+1 ; : : : ; !ng, as las n r
1{formas !r+1; : : : ; !n son diferenciables y constituyen una base local para la distribucion E 0 .
Recprocamente, una aplicacion diferenciable E 0 : x 7 ! Ex0 , siendo Ex0 un subespacio vectorial de dimension n r de Tx (M), dene una distribucion diferenciable
E : x 7 ! Ex de dimension r.
Teorema 3.30 Un sistema diferencial E de dimension r en una variedad diferenciable de dimension n, dado por un sistema diferencial E 0 : x 7 ! Ex0 , siendo
Ex0 un subespacio vectorial de dimension n r de Tx (M), es completamente
integrable, si y solo si existe una base local f!r+1; : : : ; !ng de E 0 y para todo
! de E 0 , existen 1{formas diferenciables r+1 ; ; n tales que
(1) Podr
a hacerse expresando los campos dados en funcion de campos de vectores basicos relativos
a unas coordenadas locales y completar en el punto x con vectores independientes. Denir funciones
diferenciables (ver Lema 2.44) en un entorno de x que tomen en x los valores de los coecientes de
los vectores nuevos. As el determinante de la transformacion es diferenciable en x y es distinto de
cero en x, luego sera distinto de cero en todo un entorno de x. Tenemos as una base de campos
de vectores diferenciables alrededor de x.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
3.6 Segunda forma del Teorema de Frobenius
d! =
n
X
i=r+1
115
i ^ ! i :
Demostracion.- Completemos la base local fX1 ; : : : ; Xr g de la distribucion complementaria E para formar una base local de campos de vectores diferenciables en
un entorno abierto U ; sea f!1; : : : ; !r ; !r+1; : : : ; !ng su base dual de 1{formas diferenciables, de las cuales f!r+1; : : : ; !ng forman una base local de la distribucion
E0.
Se tiene
X
d! =
ajk !j ^ !k :
(3.5)
1j<kn
Si E es completamente integrable:
[Xj ; Xk ] =
r
X
i=1
cijk Xi ;
1 j; k r;
donde cijk son funciones diferenciables en U .
Aplicando a los dos miembros de (3.5) a (Xj ; Xk ); j; k r, resulta:
2d!(Xj ; Xk ) = Xj !(Xk ) Xk !(Xj ) !([Xj ; Xk ]) = 0;
pues, como ! 2 E 0 , se tiene !(X`) = 0, para ` r.
1
0
X
X
@
a ! ^ ! (Xj ; Xk ) =
a ! ^ ! A (Xj ; Xk ) =
1< n
1< n
X
X
1
1
=2
1< n
a
2S2
" ! (X(j) )! (X(k) ) = 2 ajk
De (3.6) y (3.7), se tiene: ajk = 0 1 j; k r.
Por tanto
d! =
X
1n
r+1n
a ! ^ ! =
n
n
X
X
=r+1 =1
!
a ! ^ ! =
n
X
=r+1
(3.6)
(3.7)
^ ! :
Inversamente, supongamos que se tiene
dw =
n
X
s=r+1
s ^ ! s :
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
116
3 Sistemas diferenciales. Teorema de Frobenius
Entonces, para 1 j; k r, se tiene
2d!(Xj ; Xk ) =!Xj !(Xk ) Xk !(Xj ) !([Xj ; Xk ]) = !([Xj ; Xk ])
n X
n
X
X
1
s
s
" s (X(j) )!s(X(k) ) = 0
^ ! (Xj ; Xk ) = 2
s=r+1 2S2
s=r+1
9
>
=
>
;
de donde !([Xj ; Xk ]) = 0, y como ! 2 E 0 , se sigue que [Xj ; Xk ] 2 E . Luego existen
r
X
cijk funciones diferenciables y [Xj ; Xk ] = cijk Xi . Con lo que el sistema diferencial
i=1
es completamente integrable.
Denicion 3.31 Se dene un sistema diferencial de dimension r en una variedad
diferenciable M de dimension n, dando una (n-r){forma descomponible no
nula en ningun punto
= !r+1 ^ ^ !n:
Con esta terminologa se tiene inmediatamente la siguiente proposicion de caracterizacion de integrabilidad de un sistema diferencial:
Proposicion 3.32 Para que un sistema diferencial E denido por la (n-r){forma
= !r+1 ^ ^ !n sea completamente integrable es necesario y suciente
que una de las condiciones siguientes se verique:
1)
2)
d
= ^ d
^ ! = 0; = r + 1; : : : ; n:
Ejemplo 3.33 El sistema diferencial de dimension 2 en IR3 denido por la 1{forma
! = P (x; y; z)dx + Q(x; y; z)dy + R(x; y; z)dz, es completamente integrable si solo si
d! ^ ! = 0; de donde se obtiene la condicion de integrabilidad:
P (Ry Qz ) + Q(Pz Rx) + R(Qx Py ) = 0:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Integracion
en variedades diferenciables
4.1 Variedades de Riemann
Denicion 4.1 Un campo de tensores diferenciable g de tipo (0; 2) sobre una variedad diferenciable M es simetrico y denido positivo si en todo x 2 M:
1) gx(u; v) = gx(v; u); 8u; v 2 Tx(M)
2) gx(u; u) 0; 8u 2 Tx(M) y gx(u; u) = 0 , u = 0:
Un campo de tensores diferenciable g de tipo (0; 2) sobre M, simetrico y
denido positivo se dice que es una metrica riemanniana sobre M.
Una variedad diferenciable M sobre la cual esta denida una metrica
riemanniana se dice que es una variedad riemanniana o de Riemann, y la
denotaremos por (M; g).
Ejemplo 4.2 IRn con el producto interior natural:
n
X
g (X ; Y ) = X ; Y = ai bi ;
x
x x
x x
i=1
donde
n
n
X
X
@
i
X = a @xi ; Y = bi @x@ i :
i=1
i=1
g es diferenciable, pues g( @x@ i ; @x@ j ) = ij .
Ejemplo 4.3 Sea M una supercie en IR3. Si i : M ,! IR3 es la inclusion; para
Xp; Yp vectores tangentes a M en p, denimos
gp(Xp ; Yp) = i (Xp ); i (Yp) = Xp; Yp ;
esto es, denimos g tomandola como el producto interior eucldeo de Xp; Yp como
vectores de IR3. A esta metrica se le conoce como la primera forma fundamental de
la supercie.
117
118
4 Integracion en variedades diferenciables
4.2 Variedades de Riemann como espacios metricos
Sea (M; g) una variedad de Riemann y sea una curva diferenciable en M
: [a; b] ! M
Denicion 4.4 La longitud de la curva esta denida por el valor de la integral
l=
Zb
a
g(_(t); _ (t)) 1=2 dt:
El integrando es una funcion continua al serlo g y . Ademas es facil establecer
que el valor de la integral no depende de la parametrizacion de la curva.
Enunciamos, a continuacion, un resultado que relaciona la metrica en una variedad, dada por un tensor metrico, y la funcion distancia:
Teorema 4.5 Una variedad de Riemann conexa es un espacio metrico con la metrica d(x; y) = nmo de las longitudes de las curvas de clase C 1 a trozos que
unen x con y.
La topologa de este espacio metrico y la topologa de la variedad coinciden.
4.3 Particion de la unidad
En este parrafo haremos uso de deniciones enunciadas en el parrafo .
Denicion 4.6 Una particion de la unidad diferenciable sobre M es una coleccion
de funciones diferenciables ffi gi2I denidas sobre M con las siguientes propiedades:
1. fi (x) 0; 8x 2 M; 8i 2 I .
2. fsop(fi )gi2I forman un recubrimiento localmente nito de M.
X
3.
fi (x) = 1; 8x 2 M:
i 2I
Notese que en virtud de 2. la suma esta bien denida, ya que cada punto tiene
un entorno en el que solo un numero nito de fi son distintas de cero.
Denicion 4.7 Una particion de la unidad ffi gi2I se dice que esta subordinada a
un recubrimiento abierto fA g2 de M si para cada i 2 I , existe un A
tal que sop(fi ) A :
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.3 Particion de la unidad
119
El lema que enunciamos a continuacion, lo usaremos para demostrar la existencia
de una particion de la unidad sobre una variedad.
Lema 4.8 Sea A un recubrimiento abierto de una variedad paracompacta M. Existe
un renamiento localmente nito y numerable U = fUi gi2I de A constituido
por entornos coordenados relativos a homeomorsmos
coordenados 'i , con
1
r
n
n
'i(Ui ) = C0 (r) y tal que Vi = 'i C0 ( 2 ) constituyen un recubrimiento
V de M.
Teorema 4.9 Sea M una variedad diferenciable paracompacta. Entonces, dado
cualquier recubrimiento abierto A de M, existe una particion de la unidad
diferenciable sobre M, ffi gi2I , subordinada a un renamiento U de A.
Demostracion.- Usando el lema anterior (Lema 4.8) y el Lema 2.44 podemos
considerar funciones diferenciables hi : M ! IR, con valores comprendidos entre 0 y
1, tales que
hi(x) = 1 si x 2 Vi
hi(x) = 0 si x 62 Ui (i 2 I )
con sop(hi ) = fx 2 M hi(x) 6= 0g Ui :
Consideremos las funciones fi : M ! IR dadas por
fi = Xhi
hj
j 2I
las cuales estan bien denidas y son diferenciables, pues el denominador solo consta
de un numero nito de sumandos no nulos; y tienen las siguientes propiedades:
1. fi 0 sobre M; 8i 2 I .
2. fsop(fi )gi2I es un recubrimiento localmente nito de M. Vi fsop(fi )g Ui:
3.
X
i 2I
fi (x) = 1; 8x 2 M:
Tenemos pues que ffi gi2I es una particion de la unidad subordinada al renamiento fUi gi2I .
Aplicacion a la existencia de metricas riemannianas
Teorema 4.10 Si M es una variedad paracompacta admite una metrica riemanniana.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
120
4 Integracion en variedades diferenciables
Demostracion.- Dado un recubrimiento abierto A = fA g2 de M, siguiendo
las notaciones anteriores; sea ffi gi2I la particion de la unidad subordinada al recubrimiento localmente nito y numerable U = fUigi2I , constituido por abiertos
coordenados con homomorsmos coordenados 'i; y sea ademas V = fVi gi2I el recubrimiento considerado en el Lema 4.8, y pongamos i = 'i jVi .
En cada Vi existe una metrica de Riemann denida por
gxi (ux; vx) = (i ) (ux); (i ) (vx)
ux; vx 2 Tx(M); x 2 Vi :
Podemos denir en un punto arbitrario x 2 M
gx =
X
i 2I
fi (x)gxi :
En el segundo miembro solo hay un numero nito de sumandos no nulos. Y se
verica:
gx(u; v) = gx(v; u); 8u; v 2 Tx(M):
X
gx(u; u) = fi (x)gxi (u; u) 0; 8u 2 Tx(M):
i 2I
gx(u; u) = 0 ) 8i 2 I; fi (x)gxi (u; u) = 0 ) 9i 2 I; gxi (u; u) = 0 ) u = 0:
Ademas g es diferenciable. Luego g es una metrica riemanniana sobre M.
4.4 Orientacion de variedades
Antes de tratar la orientacion de variedades, necesitamos recordar el concepto
de orientacion en espacios vectoriales.
Denicion 4.11 Sea E un espacio vectorial real de dimension n se dice que dos
bases fe1; : : : ; eng; ff1 ; : : : ; fn g tienen la misma orientacion si el determinate
de la matriz cambio de base es positivo, es decir,
det(aij ) > 0
donde fj =
n
X
i=1
aij ei (j = 1; : : : ; n)
Esto permite establecer una relacion de equivalencia en el conjunto de todas las
bases de E ; existiendo unicamente dos clases de equivalencia.
Denicion 4.12 Un espacio vectorial orientado es un espacio vectorial junto con
una clase de equivalencia de bases citadas arriba.
Las bases de dicha clase se dice que estan orientadas o positivamente
orientadas.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.4 Orientacion de variedades
121
Otra manera de expresar la orientacion en un espacio vectorial n{dimensional es
a traves de n{formas no nulas:
Proposicion 4.13 Una n{forma ! 2 Vn E f0g tiene el mismo signo (o signo
opuesto) sobre dos bases si estas tienen la misma (resp., opuesta) orientacion.
V
La eleccion de una ! 2 n E f0g determina una orientacion.
V
!1; !2 2 n E f0g determinan la misma orientacion si y solo si !1 =
!2, donde es un numero real positivo.
n
X
i=1
Demostracion.- Si fe1: : : : ; eng y ff1 ; : : : ; fn g son dos bases de E , y si fj =
aij ei, tenemos:
!(f1 ; : : : ; fn) =
=
X
1i1 ;:::;in n
X
2Sn
ai11 ainn !(ei1 ; : : : ; ein ) =
" a1 (1) an(n) !(e1 ; : : : ; en ) = det(aij )!(e1 ; : : : ; en):
De esta relacion surgen inmediatamente las armaciones de la proposicion.
Si E es un espacio vectorial eucldeo, esto es, E tiene un producto interior
denido positivo. Entonces para orientar a E podemos elegir una base ortonormal
fe1; : : : ; eng y sea ! la n{forma tal que !(e1; : : : ; en) = 1.
n
X
Si ff1; : : : ; fn g es otra base ortonormal de E , tal que fj = aij ei , entonces
i=1
!(f1 ; : : : ; fn ) = det(aji )!(e1 ; : : : ; en ) = 1;
segun que ff1 ; : : : ; fn g tenga la misma u opuesta orientacion que fe1; : : : ; eng.
En este caso la forma ! da una interpretacion geometrica cuando n = 2 o 3;
!(v1 ; v2) y !(v1; v2 ; v3) es el area y el volumen, respectivamente, del paralelogramo
y del paraleleppedo, de los cuales los vectores dados son los lados o aristas partiendo
del origen.
Para extender el concepto de orientacion a una variedad M, trataremos de orientar cada espacio tangente Tx(M), de tal forma que la eleccion de orientacion en los
espacios tangentes sea diferenciable.
Denicion 4.14 Sea M variedad diferenciable. Se dice que M es orientable si existe
un atlas f(U ; ')g2A para la estructura diferenciable sobre M tal que,
para cartas arbitrarias (U; ' (x1 ; : : : ; xn ) y (U ; ' (x1 ; : : : ; xn ),
con U \ U 6= , la funcion diferenciable
D : U \ U ! IR
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
122
4 Integracion en variedades diferenciables
determinada por dx1 ^ ^ dxn = D dx1 ^ ^ dxn, es positiva, es decir,
D (x) > 0; 8x 2 U \ U .
Denicion 4.15 Una orientacion en una variedad diferenciable M es una eleccion
de un atlas f(U ; ')g2A para la estructura diferenciable de M vericando
las condiciones de la denicion anterior y maximal con respecto a dicha
condicion.
Una variedad orientada es una variedad diferenciable en la que se ha
elegido una orientacion.
Observese que la funcion D de la denicion no es otra cosa que el determinante
jacobiano de ' ' 1, es decir
!
D = det @ j (xi ) :
@x
Ejemplo 4.16 El brado tangente T (M) de cualquier variedad M es orientable.
Pues para conjuntos de funciones coordenadas (x1 ; : : : ; xn ) y (x1 ; : : : ; xn ) en M
alrededor de x 2 M
132
2 0
i
D (v) = 4det @ @xj A5 v 2 Tx(M):
@x
jx
Proposicion 4.17 Sea M una variedad diferenciable, n{dimensional. Supongamos
que existe ! 2 n(M) tal que !(x) 6= 0; 8x 2 M. Entonces M es orientable.
Demostracion.- Sea A= f(U ; ')g2A un atlas maximal sobre M. En una carta
U; ' (x 1 ; : : : ; x n) de A, con U conexo, se tiene
! = f dx1 ^ ^ dxn
con f : U ! IR funcion diferenciable.
Como ! 6= 0, resulta f 6= 0; y como U es conexo, f > 0 o f < 0 sobre U.
Consideremos
A0 = (U; ' ) f > 0; 2 A
Veamos que A0 da una orientacion en M.
Claramente los abiertos de las cartas de A0 recubren M, pues si x 2 M y x 2 U ,
con (U ; ') 2 A tal que f < 0; se obtiene una nueva carta (V; ) 2 A con x 2 V y
f > 0, a partir de (U ; '), cambiando de signo una de las funciones coordenadas
de ', por ejemplo
V = U ;
(x1 ; : : : ; xn ) ( x1 ; x2 ; : : : ; xn ):
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.4 Orientacion de variedades
123
Ademas, si (U ; '); (U ; ' ) 2 A0 con U \ U 6= , entonces
dx1 ^ ^ dxn = f1 ! = ff dx1 ^ ^ dxn ; siendo ff > 0:
Y, por ultimo, A0 es maximal, al serlo A.
Vamos a dar ahora un ejemplo de variedad orientable.
Proposicion 4.18 Sea (M; F ) una subvariedad de IRn+1 de dimension n. Supongamos que (M; F ) admite un campo de vectores normal no nulo; es decir,
supongamos que existe una aplicacion diferenciable
V : M ! T IRn+1
con V (x) 2 TF (x)(IRn+1); V (x) 6= 0 y V (x) es perpendicular a F (Tx(M)).
Entonces M es orientable.
Demostracion.- Dado un campo de vectores normal V , consideremos la n{forma
diferencial denida en los puntos de F (M) por
= V 1 dr2 ^ ^ drn+1 V 2dr1 ^ dr3 ^ ^ drn+1 + +( 1)n+1V n+1dr1 ^ ^ drn :
Tomenos ahora la n{forma sobre M dada por ! = F . Demostremos que
!(x) 6= 0; 8x 2 M.
Supongamos que !(x) = 0, para algun x 2 M. Entonces para todo v1; : : : ; vn 2
Tx(M)
0 = !x(v1 ; : : : ; vn) = (F )x (v1 ; : : : ; vn) = F (x) (F (v1 ); : : : ; F (vn)) :
Ahora bien, cada vector u 2 TF (x)(IRn+1) es de la forma
u = F (v) + cV (x); para algun v 2 Tx(M) y c 2 IR:
As, para arbitrarios vectores u1; : : : un 2 TF (x)(IRn+1):
F (x)(u1; : : : ; un) =
= F (x) (F (v1 ) + c1V (x); : : : ; F (vn ) + cnV (x)) =
= F (x) (F (v1 ); : : : ; F (vn)) +
n
X
cj F (x) (F (v1 ); : : : ; F (vj 1 ); V (x); F (vj+1 ); : : : ; F (vn )) =
j =1
= F (x) (F (v1 ); : : : ; F (vn)) +
n
j)
X
+(n + 1) cj (dr1 ^ ^ drn+1 )(V (x); F (v1 ); : : : ; V (x); : : : ; F (vn)):
j =1
+
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
124
4 Integracion en variedades diferenciables
Con lo que F (x) = 0, lo cual es absurdo.
El proximo teorema caracteriza totalmente la orientabilidad de variedades paracompactas mediante n{formas no nulas:
Teorema 4.19 Sea M una variedad paracompacta. M es orientable si y solo si
existe ! 2 n(M), tal que !x 6= 0; 8x 2 M.
Demostracion.- Consideremos un atlas f(U ; ')g2A de M determinando una
orientacion en la variedad. Entonces U = fU g2A es un recubrimiento abierto
de M y puesto que M es paracompacto, consideremos V = fVigi2I un renamiento
localmente nito de U y ffi gi2I una particion de la unidad diferenciable subordinada
a V.
Puesto que, para cada Vi 2 V existe un 2 A tal que Vi U 2 U , se tiene que
el par (Vi ; 'i = 'jVi ) es una carta del atlas determinado por V .
Consideremos (x1i ; : : : ; xni) las funciones coordenadas de la carta (Vi ; 'i), entonces
!i = dx1i ^ ^ dxni es una n{forma diferenciable sobre Vi no nula. Denimos
!=
X
i 2I
fi !i
Es claro que ! esta bien denida y ! 2 n(M). Vamos a probar ahora que
! 6= 0; 8x 2 M.
Para x 2 M arbitrario, sea (U ; ' ) del atlas de orientacion tomado al principio,
con x 2 U y con funciones coordenadas (y1 ; : : : ; yn ). Entonces para cada Vi 2 V ,
con Vi \ U 6= ,
!i = dx1i ^ ^ dxni = ai dy1 ^ ^ dyn sobre Vi \ U
y ai > 0 sobre Vi \ U , puesto que (Vi ; 'i) y (U ; ' ) pertenecen al atlas de
orientacion de M. As
!jU =
Puesto que
X
i 2I
X
i 2I
(fi !i)jU =
X
i 2I
!
fi ai dy1 ^ ^ dyn :
fi = 1, existe i0 2 I tal que fi0 (x) > 0 y puesto que ai0 (x) 6= 0 y
cada fi ai 0, resulta
X
i 2i
!
fi ai (x) 6= 0 ) !(x) 6= 0:
La otra implicacion esta establecida en la Proposicion 4.17.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.4 Orientacion de variedades
125
Variedades de Riemann orientadas
Una variedad riemanniana M tiene la propiedad especial que el espacio tangente
Tx(M) en cada punto x 2 M tiene un producto interior. Aplicando lo expuesto
anteriormente relativo a n{formas sobre espacios vectoriales eucldeos de dimension
n tenemos:
Proposicion 4.20 Sea M una variedad riemanniana orientable con metrica riemanniana g. Correspondiendo a una orientacion de M existe una unica n{
forma ! que da la orientacion y que toma el valor +1 sobre una referencia
ortonormal orientada.
Demostracion.- Para cada punto x 2 M, !x esta determinada requiriendo que
sobre una base ortonormal orientada fe1; : : : ; eng de Tx (M), se tenga
!x(e1 ; : : : ; en) = +1:
Sea U; ' (x1 ; : : : ; xn) , tratamos dar una expresion para las componentes de
!( @x@ 1 ; : : : ; @x@n ) sobre U en terminos de gij = g( @x@ i ; @x@ j ), de las cuales se deducira
que ! es una n{forma diferenciable.
Escojamos en x 2 M, una base ortonormal orientada fe1 ; : : : ; en g de Tx(M);
entonces
n
@ =X
k ek (i = 1; : : : ; n) siendo (ai ) = A la matriz cambio de base:
a
j
i
@x jx k=1 i
@ @ X
Luego
n
n
n
X
X
k
`
gij (x) = gx @xi ; @xj =
ai ek ; aj e` = aki akj (1 i; j n)
k=1
k=1
`=1
resulta por tanto que gij (x) = tAA, es decir, det A = det gij (x) 1=2 .
Por otra parte,
@
@
!x @x1 ; : : : ; @xn = det(aki )!(e1 ; : : : ; en) = det(aki ):
jx
jx
Por lo que las componentes de ! en coordenadas locales son
@
@
!x @x1 ; : : : ; @xn = det(gij (x))1=2 :
jx
jx
As la componente de ! en U es la raiz cuadrada de funciones positivas diferenciables, luego es diferenciable en U . Ya que (U; ') es arbitrario, ! es una n{forma
diferenciable sobre M, teniendo como expresion local
q
!x = det(gij (x)) dx1jx ^ ^ dxnjx:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
126
4 Integracion en variedades diferenciables
Denicion 4.21 Esta n{forma ! se llama elemento de volumen de la variedad riemanniana orientada.
Si M = IRn con coordenadas cartesianas y metrica usuales, entonces el elemento
de volumen es
! = dr1 ^ ^ drn :
4.5 Integracion en IRn
Hacemos aqu un peque~no repaso de ciertos conceptos y resultados relativos a
integracion en IRn.
Denicion 4.22 Diremos que un subconjunto A IRn tiene contenido (de Jordan)
nulo , c(A) = 0, si para todo " > 0, existe una coleccion nita de cubos
Cr1; : : : ; Cr que recubren a A y la suma de sus volumenes es menor que ",
X
vol Ci < ".
i=1
Diremos que un subconjunto A IRn tiene medida (de Lebesgue) nula,
m(A) = 0, si para todo " > 0 existe un conjunto numerable de cubos
1
X
recubriendo a A y vol Ci < ".
i=1
Nota 4.23 Evidentemente, c(A) = 0 implica m(A) = 0 y, si A es compacto, el
recproco tamben se tiene.
Denicion 4.24 Un subconjunto
acotado D IRn se llama dominio de integracion
si su borde @D = D D tiene contenido nulo: c(@D) = 0.
Una funcion f : IRn ! IR se dice es casi continua si el conjunto de puntos
en los que deja de ser continua tiene contenido nulo.
Ejemplos de dominios de integracion: Cubos y bolas en IRn. Conjuntos limitados
por curvas y supercies diferenciables en IR2 y IR3 , respectivamente.
Se tiene el siguiente resultado relativo a integracion en IRn:
Teorema 4.25 Sea D un dominio de integracion en IRn y f una funcion real sobre
D. Supongamos que f esta acotada y es casi continua sobre D. Entonces
existe la integral de Riemann
Z
D
f dr1 drn:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.5 Integracion en IRn
127
Propiedades basicas de la integral de Riemann
Sean D; D1 ; D2 dominios de integracion en IRn; no tiene dicultad demostrar
que D (la clausura de D), D (el interior de D), D1 [ D2 , D1 \ D2 y D1 D2 son
dominios de integracion.
Sean ademas f y h funciones reales acotadas y casi continuas sobre IRn y ; numeros reales. Entonces se tienen las siguientes propiedades:
1)
2)
3)
4)
R f dr1 drn = 0:
RD f dr1 drn + R f dr1 drn
DR1
D2
1
f dr drn :
D
\
D
1
2
R (f + h)dr1 drn = R f dr1 drn + R h dr1 drn:
D
D
D
R
1
n
Si f 0 sobre D y c(D) 6= 0 ) D f dr dr 0 y
R
f dr1 drn = 0 , f = 0 :
Si c(D) = 0 )
R
1
n
D1 [D2 f dr dr =
D
Denicion 4.26 La funcion caracterstica A de un subconjunto A de un espacio
X esta denida por
A (x) = 1 x 2 A
A (x) = 0 x 2 X A:
A es acotada y discontinua en @A. Si D es un dominio de integracion, tenemos
c(@D) = 0, y por consiguiente D es integrable.
Si D0 es un dominio de integracion, que contiene a D, entonces
Z
D0
D f dr1 drn =
Z
D
f dr1 drn :
As, si f : IRn ! IR esta acotada, tiene soporte compacto y es casi continua,
entonces denimos Z
Z
1
n
f dr dr = f dr1 drn ;
D
IRn
usando un dominio de integracion D tal que sop(f ) D.
El siguiente teorema justica el usual calculo de integrales multiples reemplazandolos por simples integraciones de funciones de una variable (integrales iteradas).
Teorema 4.27 Si D = fx 2 IRnai xi bi ; i = 1; : : : ; ng y f es una funcion
continua sobre el dominio de integracion D, entonces
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
128
4 Integracion en variedades diferenciables
Z
D
f dx1 dxn =
Z bn Z b2 Z b1
an
a2
a1
!
f (x1 ; : : : ; xn )dx1 dx2 dxn :
Necesitamos otro teorema relativo al cambio de variable o variables de integracion. En el caso de funciones de una sola variable este es la estandard e indispensable tecnica de sustitucion, que nos permite escribir
Zd
c
f (y)dy =
Zb
a
dy dx;
f (h(x)) dx
donde y = h(x); a x b, con c = h(a) y d = h(b), h diferenciable con continuidad
y f : IR ! IR continua.
Consideremos h : U ! V un difeomorsmo de U IRn y V IRn y denotemos
por J (h) su determinante jacobiano. Una funcion f sobre V determina una funcion
f h sobre U y tenemos la siguiente relacion entre sus integrales:
Teorema 4.28 (Cambio de variable) Supongamos que D U y h(D) V son
dominios de integracion y que f es integrable en h(D). Entonces f h es
integrable sobre D y
Z
h(D)
f (y)dy1 dyn =
Z
D
f (h(x))kJ (h)kdx1 dxn:
Antes de extender estas ideas a variedades diferenciables, necesitamos conocer
que le ocurre a los dominios de integracion al transformarlos mediante un difeomorsmo:
Proposicionn4.29 Sea A un subconjunto relativamente compacto (Am es compacto)
de IR tal que c(A) = 0 (contenido nulo) y sea f : A ! IR , n m una
aplicacion diferenciable con continuidad (C 1). Entonces c(F (A)) = 0.
Usaremos este hecho para extender la nocion de contenido nulo y medida nula a
subconjuntos de una variedad diferenciable.
4.6 Integracion sobre variedades diferenciables
Denicion 4.30 Un subconjunto relativamente compacto A (su clausura es un
conjunto compacto) de una variedad diferenciable n{dimensional M, se dice
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.6 Integracion sobre variedades diferenciables
129
que tiene contenido nulo, c(A) = 0, si es union nita de subconjuntos, A =
A1 [ [ Ar cada uno de los cuales queda en un entorno coordenado (Ui ; 'i )
tal que c('i(Ai )) = 0 en IRn, i = 1; : : : ; r.
Un subconjunto B M se dice que tiene medida nula, m(B) = 0, si B es
la union de una coleccion numerable de subconjuntos B = [1
i=1 Bi , tal que
cada Bi tiene contenido nulo, c(Bi) = 0.
Como consecuencia de esta denicion y de la proposicion anterior, tenemos el
siguiente resultado:
Proposicion 4.31 Sea F : M ! N una aplicacion diferenciable entre variedades
con dim M dim N.
Si A M es relativamente compacto y c(A) = 0, entonces c(F (A)) = 0.
Si B M tal que m(B) = 0, entonces m(F (B)) = 0.
Denicion 4.32 Un subconjunto D M es un dominio
de integracion si D es
relativamente compacto y el borde @D = D D de D tiene contenido nulo
c(@D) = 0:
Teorema 4.33 Si D es un dominio de integracion en M, tambien lo son su clausura
y su interior.
La union nita e interseccion de dominios de integracion son dominios
de integracion.
La imagen de un dominio de integracion mediante un difeomorsmo es
un dominio de integracion.
Demostracion.- Todas estas propiedades son una consecuencia inmediata de las
ultimas deniciones y de los correspondientes resultados para subconjuntos de contenido nulo y dominios de integracion en IRn.
Para la ultima armacion es preciso observar que un difeomorsmo enva puntos
del borde en puntos del borde.
Supongamos ahora que M es una variedad orientable de dimension n, y sea
! 2 n(M) una n{forma no nula que determina la orientacion.
Denicion 4.34 Una funcion f : M ! IR es integrable si es acotada, tiene soporte
compacto y es casi continua.
Una n{forma sobre M se dice que es integrable si = f!, con f
integrable.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
130
4 Integracion en variedades diferenciables
Notemos que la denicion de n{formas integrables no depende de la n{forma !
particular que da la orientacion de M; pues si !0 es otra n{forma que da la misma
orientacion que !, resulta que !0 = h! con h funcion diferenciable y positiva. Por
tanto
= f! = fh !0:
Si f tiene soporte compacto, es acotada y es casi continua, entonces lo mismo
verica f=h.
Denotemos por nI(M) el conjunto de las n{formas integrables.
Teorema 4.35 Sea una variedad diferenciable, orientable, paracompacta y de dimension n. Existe entonces una unica aplicacion
Z
: nI(M) ! IR
vericando las siguientes condiciones:
1. IR{lineal, es decir
Z
Z
( + ) =
= Z
Z
+
Z
8; 2 nI (M)
8 2 IR y 8 2 nI(M):
2. Si el soporte de esta contenido
en un abierto coordenado U de una
1
n
carta U; ' (x ; : : : ; x ) tal que
dx1 ^ ^ dxn > 0
(es decir de orientacion positiva), y admite en U la representacion local
= adx1 ^ ^ dxn
entonces
Z
Z
=
(a ' 1)dr1 drn ;
IRn
donde el segundo miembro es la integral de a ' 1 (cuyo soporte es
un compacto de IRn) en el sentido de Riemann, y r1 ; : : : ; rn son las
funciones coordenadas naturales de IRn .
Demostracion.- Por ser la variedad M orientable y paracompacta, podemos considerar sobre ella un atlas de orientacion f(Ui ; 'i (x1i ; : : : ; xni)gi2I localmente nito
tal que 'i(Ui ) = C0n(r), y subordinado al recubrimiento fUigi2I una particion de la
unidad ffi gi2I .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.6 Integracion sobre variedades diferenciables
131
As, si 2 nI(M), para cada i 2 I , fi 2 nI(M) y tiene su soporte compacto
contenido en el abierto coordenado Ui, y si en el fi = adx1i ^ ^ dxni , denimos
Z
fi =
Z
(a 'i 1)dr1 drn :
IRn
P
Ahora, como K = sop() es compacto, la suma i2I fi solo tiene un numero
nito de sumandos no nulos, puesto que K estara recubierto por un numero nito
de los soportes de los fi , y podemos poner, por denicion
Z
=
XZ
i 2I
fi :
Es claro que la aplicacion as denida es la unica que satisface las condiciones
del teorema.
Pero veamos ahora
que esta bien denida:
R
1) Para denir fi hemos utilizado la carta local (Ui ; 'i) veamos que si el
soporte de fi esta contenido en
la interseccion Ui \ Uj , con (Uj ; 'j ) otra carta local
R
del atlas tomado, el valor de fi es independiente de la carta considerada. En
efecto, en Ui \ Uj se tiene
!
`
fi = adx1i ^ ^ dxni = bdx1j ^ ^ dxnj y b = det @xki a:
@xj
Utilizando el Teorema 4.28 de la pagina 128, tenemos para x 2 Ui \ Uj
Z
IRn
(b 'j 1)j'j (x)ds1 dsn =
Z
C0n (r)
Z
Z
C0n (r)
(b 'j 1)j'j (x)ds1 dsn
(b 'j 1)(s1 ; : : : ; sn )ds1 dsn =
@xkj
=
(b 'j 1)(('j 'i 1)(r1 ; : : : ; rn )) det
@xli
C0n (r)
=
Z
!
C0n (r)
!
'i 1 (r1 ;:::;rn )
@x`i ' 1 (' ' 1)(r1 ; : : : ; rn )
a det @x
j i
j
k
j
=
Z
@xkj
det
@x`i
!
dr1 drn =
'i 1(r1 : : : :rn) dr1 drn =
a 'i 1(r1 ; : : : ; rn ) dr1 drn :
n
IR
R
2) El valor de es independiente de la particion de la unidad ffigi2I
elegida. En efecto, si fhj gj2J es otra particion de la unidad subordinada a otro
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
132
4 Integracion en variedades diferenciables
recubrimiento localmente nito y de orientacion fVj gj2J de M, los abiertos fUi \
Vj g(i;j)2I J constituyen un nuevo recubrimiento localmente nito para el cual las
funciones ffi hj g(i;j)2I J constituyen una particion de la unidad subordinada. As,
se tiene
XZ
i
luego
1
0 Z
X X
hj fi A
fi = @
i
XZ
j
j
R esta bien denida.
hj =
X XZ
j
i
!
fi hj ;
Enunciamos ahora otras propiedades de la integral sobre M, que dejamos como
ejercicio:
Proposicion 4.36
1. Si denotamos por M la misma variedad M, pero con
orientacion opuesta, tenemos
Z
=
Z
:
2. Si ! es una n{forma no nula queRda la orientaci
on de M y si = f!
R
con f 0 y continua, entonces 0. Y f! = 0 si y solo si
f = 0.
3. Si F : M ! N es un difeomorsmo y 2 nI(N), entonces
Z
F = Z
donde el signo depende de que F conserve o no la orientacion.
4.7 Integracion en variedades de Riemann
Sea (M; g) una variedad de Riemann y ! el elemento de volumen (Denicion 4.21).
Denicion 4.37 Si D es un dominio de integracion sobre M y D es la funcion
caracterstica de D, denimos el volumen de D, que denotamos por vol D,
por
Z
vol D = D !:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.7 Integracion en variedades de Riemann
133
Denicion 4.38 Si f es una funci
R on integrable sobre M, denimos la integral de f
sobre D, denotada por D f , por
Z
D
f=
Z
f D !:
R
R
R
Cuando M es compacta: vol M = ! y f = f!.
Recordemos que en coordenadas locales U; ' (x1 ; : : : ; xn ) , la matriz de componentes gij sobre U del tensor metrico, vienen dadas por
@ @
gij = g @xi ; @xj ;
y la expresion local del elemento de volumen es
q
! = det(gij ) dx1 ^ ^ dxn :
Ejemplo 4.39 Sea M una supercie
en IR3 con metrica riemanniana inducida por
3
el producto interior eucldeo en IR , y sea (U; ') una carta local con funciones coordenadas (u; v). Sea ~x = ' 1 : W = '(U ) ! M, la representacion parametrica local
de la supercie que tiene por imagen U , o en cartesianas:
x = x(u; v)
y = y(u; v)
z = z(u; v):
Los campos de vectores basicos asociados a esta carta son:
@x @ + @y @ + @z @
@ + @y @ + @z @
~x1 = @x
~
x
=
2
@u @x @u @y @u @z
@v @x @v @y @v @z
y entonces
@x 2 @y 2 @z 2
g11 = g(~x1 ;~x1) = @u + @u + @u ;
@x + @y @y + @z @z = g ;
g12 = g(~x1;~x2 ) = @x
@u @v @u @v @u @v 21
@x 2 @y 2 @z 2
+
+
:
g22 = g(~x2;~x2 ) =
El elemento de volumen es
@v
@v
@v
q
2 dudv:
(' 1) ! = g11g22 g12
Si D es un dominio de integracion sobre M tal que D
integrable sobre D, entonces
Z
Z
Z
q
Z
U , y f una funcion
q
2 dudv =
2 dudv:
f = f! =
(f ' 1) g11g22 g12
f (u; v) g11g22 g12
D
D
'(D)
'(D)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
134
4 Integracion en variedades diferenciables
Ejemplo 4.40 Supongamos, como caso particular del ejemplo anterior, que ' es
difeomorsmo proyeccion de un abierto U de M sobre un subconjunto abierto de W
del plano XY , que identicamos con el plano parametrico.
En este caso ~x : W ! U esta dada por ~x(x; y) = (x; y; f (x; y)).
Los campos de vectores basicos asociados a esta carta son:
@ +f @
@ +f @
~x1 = @x
~x2 = @y
x @z
y @z
y
g11 = 1 + fx2
g12 = fxfy
g22 = 1 + fy2 ;
con lo que
q
q
2 dxdy = 1 + fx2 + fy2 dxdy:
~x ! = g11g22 g12
Si D U es un dominio de integracion y A W su proyeccion en el plano XY ,
entonces para una funcion integrable h sobre M, tenemos:
Z
D
h=
Z
A
q
h(x; y) 1 + fx2 + fy2 dxdy:
Cuando h 1, el valor de la integral es el area de D (= vol D).
4.8 Variedades con borde
Denicion 4.41 Una variedad con borde es un espacio M Hausdor con una base
numerable de conjuntos abiertos y una estructura diferenciable A en el siguiente sentido: A = f(U ; ')g2A consta de una familia de subconjuntos
abiertos U de M cada unocon un homeomorsmo ' sobre un subconjunto
abierto de IHn = f 2 IRn n 0g (con la topologa inducida) tal que
1. [2AU = M.
2. 8; 2 A, tal que U \ U =
6 , ' ' 1 y ' n' 1 son difeomorsmos
de '(U \ U ) y ' (U \ U ), abiertos de IH .
3. A es maximal respecto a las propiedades 1. y 2.
Proposicionn 4.42 Si (nU; ') es una carta de una variedad con borde M y si '(x) 2
@ IH = f 2 IR =n = 0g, entonces esto se verica para cualquier homeomorsmo coordenado de una carta (V; ), tal que x 2 V .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.8 Variedades con borde
135
Demostracion.- Esto se sigue (aplicando el teorema de la funcion inversa) de que
'(U ) @ IHn es un abierto de IRn y entonces ' 1 debe aplicar '(U ) \ (V ) @ IHn
difeomorcamente en un abierto de IRn, pero no subconjunto abierto de IHn, que
contiene puntos del borde, esto es, de @ IHn.
Este resultado nos permite dar la siguiente denicion:
Denicion 4.43 El conjunto de puntosn x de M para los cuales existe un homeomorsmo vericando '(x) 2 @ IH , se denomina borde de M, y se denota por
@M
@ M = fx 2 M = 9(U; ') carta local; x 2 U y '(x) 2 @ IHng:
Proposicion 4.44 Si M es una variedad diferenciable de dimension n con borde
@ M, entonces la estructura diferenciable de M determina una estructura
diferenciable de dimension n 1 sobre @ M. La inclusion i : @ M ,! M es un
embebimiento.
Demostracion.- La estructura diferenciable A~ sobre @ M esta determinada por las
~ '~), donde U~ = U \ @ M y '~ = 'jU \@ para toda carta (U; ') de M
cartas (U;
que contiene puntos de @ M. (, proyeccion sobre las primeras n 1 componentes).
Ademas, i : @ M ,! M es diferenciable y la aplicacion i es inyectiva.
Proposicion 4.45 Sea M una variedad orientada y supongamos que el borde @ M
no es vacio. Entonces @ M es orientable y la orientacion de M determina una
orientacion de @ M.
Demostracion.- Sea x 2 @ M y supongamos que (U; ') y (V; ) son dos cartas del
~ '~)
atlas de orientacion tal que x 2 U \ V . Denotamos, como anteriormente, por (U;
~
~
y (V ; ) las correspondientes cartas del atlas que da la estructura diferenciable en
@ M.
Se tiene el difeomorsmo
' 1 (f 1 ; : : : ; f n ): '(U \ V ) ! (U \ V )
(1 ; : : : ; n 1; 0) 7 ! (f 1 (1; : : : ; n 1; 0); : : : ; f n 1 (1 ; : : : ; n 1; 0); 0)
y por tanto
@f n
y 2 U \ @ M:
@i j'(y) = 0 (i = 1; : : : ; n 1);
Se sigue que la matriz jacobiana del cambio de base tiene la forma
0
B
J ( ' 1)j'(U \@M ) = B
B
@
@f 1
@1
@fn 1 1 @ 1
@f
@n 1
1 C
C
n
C
@f n 1
0
A
@ n 1
n
@f n 1
@1
@f n
@
0
@f n
@
'(y)
;
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
136
4 Integracion en variedades diferenciables
con lo que, para y 2 U \ @ M,
n
det J ( ' 1)j'(y) = @f
@n
Pero como la funcion
j(1 ;:::;n ;0)
det J (~ '~ 1)j'(y) :
n 7 ! f n ( 1 ; : : : ; n 1 ; n )
tiene valores positivos para n 0, y nula solo para n = 0, su derivada
@f n (1 ; : : : ; n 1; 0) 0:
@n
Se deduce que det J (~ '~ 1)j'(y) > 0. Luego @ M es orientable.
4.9 Teorema de Stokes
Denicion 4.46 Un dominio regular D sobre una variedad M es un subconjunto
cerrado de M con interior no vacio, tal que si x 2 @D = D D, entonces x esta en un entorno
coordenado cubico correspondiente a una carta
U; ' (x1 ; : : : ; xn ) con
'(x) = 0 2 IRn; '(U ) = C0n(");
'(U \ D) = f 2 C0n(")=n 0g:
De la denicion se deducen de forma inmediata las siguientes armaciones:
a) Los puntos y 2 @D \ U , verican xn (y) = 0.
b) Si D es acotado, entonces es un dominio de integracion.
c) D con la topologa y estructura diferenciable inducida por M es una variedad
con borde.
Denicion 4.47 En un dominio regular D de una variedad diferenciable orientable
M, se denomina orientacion inducida en @D a la orientacion de la variedad
@D para la cual, en cada carta coordenada,
( 1)ndx1 ^ ^ dxn 1 > 0:
Teorema 4.48 (Stokes) Sea M una variedad diferenciable, paracompacta, ori-
entable y de dimension n. Y sea una (n 1){forma diferencial de clase
(al menos) C 1 y con soporte compacto.
Entonces, para todo dominio regular D, se tiene
Z
D
d =
Z
@D
donde i : @D ,! M es la inclusion natural
i Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.9 Teorema de Stokes
137
Demostracion.- La exigencia de ser diferenciable y con soporte compacto es
para garantizar su integrabilidad.
Consideremos sobre M un atlas de orientacion f(Uk ; 'k )gk2A localmente nito y
ffk gk2A una particion de la unidad subordinada al recubrimiento abierto fUk gk2A.
Se tiene as que f(i 1 (Uk ); 'k i)gk2A= f(Uk \ @D; 'k jU \@D gk2A= f(U~k ; '~k gk2A es
un atlas de orientacion locamente nito sobre @D y fi fk gk2A = ffk igk2A es una
particion de la unidad subordinada a el. Entonces
Z
Z
Z
X
X i =
(i fk )(i ) =
i (fk ):
@D
@D
@D
k 2A
k 2A
Por otra parte
Z
D
d =
=
=
Z
Z
Z
D (d) =
X
D
XZ
k 2A
X
D
! Z
(fk d) =
k 2A
k 2A
XZ D (fk d) =
k 2A
!
X
fk (D d) =
! Z
d(fk )
D
D
(d(fk ) dfk ^ ) =
k 2A
!
X
k 2A
(dfk ^ ) =
!
Z
Z
X
X
XZ D d( fk ) ^ =
d(fk ):
=
D d(fk )
k 2A
k 2A D
k 2A
P
P
Por ser d( k2A fk ) = 0, como consecuencia de k2A fk = 1. En resumen:
Z
Z
XZ
XZ
@D
=
k2A @D
i (fk )
D
d =
k 2A D
d(fk ):
Luego, para probar el teorema nos bastara con establecer que
Z
@D
i (fk ) =
Z
D
d(fk );
8k 2 A:
Pero fk es una forma diferencial cuyo soporte esta contenido en un abierto
coordenado Uk , luego el teorema se reduce a ser probado para una (n-1){forma
diferencial con soporte compacto contenido en un abierto coordenado U de la
variedad M.
Sea ' = (x1 ; : : : ; xn) las funciones coordenadas en U , y supogamos que es homeomorfo a un paraleleppedo en IRn:
'(U ) = P = f(r1 ; : : : ; rn ) 2 IRn= i < ri < i ; i = 1; : : : ; ng:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
138
4 Integracion en variedades diferenciables
Sea la representacion local de en U :
=
n
X
j =1
( 1)j 1 aj dx1 ^ ^ dd
xj ^ ^ dxn
donde las aj son funciones diferenciables con soporte contenido en U y aj ' 1 tiene
soporte en el interior de P .
Por otra parte
0n 1
X @aj A 1
n
d = @ @x
j dx ^ ^ dx :
j =1
Existen entonces dos posibilidades:
1o U \ @D = En este caso, puesto que j@D = 0, es claro que
Z
@D
i = 0:
Por otra parte, U \ @D = implica que, o bien U M D o U D.
Si U M D, entonces, por ser D = 0 sobre U :
Z
D
d =
Z
D d = 0:
Si U D, entonces D = 1, luego
Z
D
1
Z 0X
n @ (a ' 1 )
j
A dr1 drn :
d = @
j
@r
P
j =1
Pero para cada j 2 f1; : : : ; ng, se tiene
Z @ (aj ' 1)
dr1 drn =
j
@r
P
Z n Z 1
=
n
1
(4.1)
(aj ' j )(r1 ; : : : ; j ; : : : ; rn )
cj drn = 0;
(aj ' 1)(r1 ; : : : ; j ; : : : ; rn ) dr1 dr
por vericarse que sop(aj ' 1) P y, por tanto
(aj ' 1)(r1 ; : : : ; j ; : : : ; rn ) (aj ' 1)(r1 ; : : : ; j ; : : : ; rn ) = 0:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.9 Teorema de Stokes
139
2o U \ @D 6= Es claro que podemos suponer, sin perdida de generalidad, que @D esta formado
por los puntos tales que xn = 0 y consideremos entonces el paraleleppedo
P0 = f(r1 ; : : : ; rn )= j < rj < j ; j = 1; 2; : : : ; n 1
0 rn < n g:
Entonces, D (x) = 1; 8x 2 U con xn(x) 0.
(' 1 ) tiene soporte contenido en la union del interior de P0 con la cara
A0n denida por rn = 0.
Se tiene
Z
@D
i =
Z X
n
= ( 1)n 1
@P0 j =1
Z
A0n
cj drn =
( 1)j 1 (aj ' 1)dr1 dr
(an ' 1)(r1 ; : : : ; rn 1 ; 0)dr1 drn 1 ;
esto es as en virtud de aplicar a la correspondiente inclusion i : (x1 ; : : : ; xn 1 ) ,!
(x1 ; : : : ; xn 1; 0), en coordenadas locales, y observando que i (dxn ) = 0.
Por otra parte,
Z
D
Z X
n @ (a ' 1 )
j
1
n
d =
@rj dr : : : dr ;
P0 j =1
pero como en caso anterior (4.1)
Z @ (aj ' 1)
1
n
@rj dr dr = 0
para j = 1; 2 : : : ; n 1:
P0
Pero
Z @ (an ' 1)
Z
1
n
@rn dr : : : dr =
P0
A0n
(an ' 1)(r1 ; : : : ; rn 1 ; 0)dr1 : : : drn 1 :
Luego tambien en este caso, incluyendo el signo ( 1)n en la orientacion de @D,
se tiene
Z
@D
i =
Z
D
d:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
140
4 Integracion en variedades diferenciables
4.10 Teorema de Green y Teorema de la divergencia
Consideremos ahora algunos ejemplos en los que D es un dominio regular de
IR2 o IR3 . En estos casos el Teorema de Stokes corresponde a teoremas clasicos del
calculo conocidos con varios nombres.
A. Teorema de Green
Sea D un dominio regular acotado de IR2 , esto es la clausura de un subconjunto
abierto del plano acotado por una curva simple cerrada diferenciable; por ejemplo,
D puede ser un disco o un anillo. Entonces @D es la union de estas curvas (en el
caso del disco es una circunferencia y un par de circunferencias en el anillo).
Una 1{forma sobre D se escribe en funcion de sus coordenadas cartesianas por
= Pdx + Qdy:
Podemos suponer que P y Q son las restricciones a D de funciones diferenciables
sobre algun abierto que contiene a D.
Tenemos
@Q @P d = @x @y dx ^ dy
y por el Teorema de Stokes
Z @Q
D @x
@P dx ^ dy = Z Pdx + Qdy:
@y
@D
El termino de la izquierda es una integral de Riemann ordinaria en un dominio
de integracion D de IR2. El otro termino es una integral sobre una variedad unidimensional y su valor es el de la usual integral de linea a lo largo de una curva
(o curvas Ci ) orientada de tal forma que al recorrer la curva la region quede a la
izquierda.
As la igualdad puede ser escrita
ZZ @Q @P XZ
dx ^ dy =
Pdx + Qdy;
D @x @y
i Ci
que se conoce como el teorema de Green.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
4.10 Teorema de Green y Teorema de la divergencia
141
B. Teorema de la divergencia
Sea D un dominio regular de IR3 , esto es, la clausura de un conjunto abierto
acotado por una supercie diferenciable cerrada.
Consideremos la 2{forma
= P dy ^ dz + Q dz ^ dx + R dx ^ dy;
donde P; Q; R son funciones diferenciables sobre un abierto de IR3 conteniendo a D.
Tenemos
@P @Q @R d = @x + @y + @z dx ^ dy ^ dz:
El Teorema de Stokes arma que
Z @P @Q @R Z
P dy ^ dz + Q dz ^ dx + R dx ^ dy:
@x + @y + @z dx ^ dy ^ dz =
D
@D
Que es la integral de Riemann sobre un dominio y al integral de supercie sobre
su borde, respectivamente. Obteniendose as el conocido teorema de la divergencia,
el cual clasicamente tiene la siguiente formulacion:
Si N = (N 1 ; N 2 ; N 3 ) es el campo de vectores normal y unitario sobre @D que
apunta hacia afuera, V el campo de vectores de componentes (P; Q; R), ! = dx ^
dy ^ dz el elemento de volumen en D IR3 y !~ = N 1dy ^ dz + N 2 dz ^ dx + N 3 dx ^ dy
el elemento de area en @D, entonces
Z
D
Z (div V ) ! =
V; N !~ :
@D
Es decir, la divergencia total de V sobre D es igual al ujo de V a traves de @D.
C. Teorema de Stokes del calculo
Consideremos D un trozo de supercie embebida en IR3 y acotada por una curva
simple diferenciable.
Ya que dx; dy; dz pueden ser consideradas, por restriccion, como 1{formas sobre
D o sobre @D, toda 1{forma sobre D puede escribirse como
= P dx + Q dy + R dz;
donde P; Q; R son funciones diferenciables sobre D.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
142
4 Integracion en variedades diferenciables
En este caso el Teorema de Stokes arma que
@P @R @Q
Z @R @Q dy ^ dz + @z @x dz ^ dx + @x
@y
@z
D
=
Z
@D
@P dx ^ dy =
@y
P dx + Q dy + R dz:
La integral de la izquierda es una integral de supercie y la de la derecha una
integral de lnea. Obteniendose as el usual Teorema de Stokes del calculo superior.
4.11 Aplicacion a los grupos cohomologa de De Rham
Proposicion 4.49 Sea M una variedad orientable y compacta de dimencion n con
@ M = . Entonces
H n (M) =
6 f0g:
Demostracion.- Sea ! el elemento de volumen, entonces
Z
! > 0:
Supongamos que ! = d para algun (n 1){forma . Entonces por el teorema
de Stokes
Z
Z
Z
! = d =
= 0:
@
Lo cual es absurdo. Luego ! determina una clase no nula en H n (M).
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Diferentes enfoques
de conexiones lineales
En este tema expondremos varias vias para introducir el concepto de conexion
lineal, sobre una variedad diferenciable M, as como primeras propiedades deducidas
de tales deniciones.
Si X e Y son campos de vectores sobre una variedad M, vamos a denir un nuevo
campo de vectores rX Y sobre M, cuyo valor en cada punto x es el vector variacion
de Y en la direccion de Xx.
Para mejor comprender este concepto, repasemos el concepto de derivada covariante natural en IRn.
Un campo de vectores Y en IRn puede ser interpretado como una aplicacion
Y : IRn ! IRn diferenciable; as si v es un vector en p de IRn e Y es un campo de
vectores (diferenciable) en p, esta bien denido el vector
Y (p + tv) Y (p)
(Dv Y ) (p) = tlim
!0
t
que, si Y se expresa en funcion de los campos de vectores basicos en IRn, corresponn
X
1
n
dientes a las coordenadas cartesianas globales (r ; : : : ; r ) , por Y = Y i @r@ i , se
i=1
puede poner
n
X
(Dv Y ) (p) = v(Y i ) @r@ i ;
i=1
donde v(Y i) expresa la derivada direccional de la funcion Y i en la direccion de v.
Si ahora consideramos X e Y campos de vectores diferenciables en p,
DX Y (p) = DXp Y
dene un campo de vectores DX Y en IRn, que denominaremos derivada covariante
de Y en la direccion de X .
Ejemplo 5.1 Tomemos en IR3 los campos de vectores X = (A; B; C ), Y = (xy2 +
4z; y2 x; x + z3), entonces
DX Y = X (xy2 + 4z); X (y2 x); X (x + z3) =
143
144
Diferentes enfoques de conexiones lineales
= y2 A(x; y; z) + 2xyB(x; y; z) + 4C (x; y; z);
A(x; y; z) + 2yB(x; y; z); A(x; y; z) + 3z2 C (x; y; z) :
Propiedades de la derivada covariante o conexion natural en
IR
n
:
Sean X; Y; Z; W campos vectoriales (diferenciables) en IRn, y sea f una funcion
diferenciable real, entonces se tienen las siguientes propiedades:
DX (Y + Z ) = DX Y + DX Z
DX + W Y = DX Y + DW Y
DfX Y = f DX Y
DX (fY ) = (Xf )Y + f DX Y
Todas estas propiedades se deducen directamente de la denicion de D, entendida
como derivada direccional de funciones diferenciables en IRn.
Es importante rese~nar que DX Y puede ser calculado una vez conocido Y a
lo largo de una curva que ja el vector Xp en p; es decir, tal que (0) = p y
0 (0) = Xp .
En efecto, sea Y(t) = Y 1 (t) ; : : : ; Y n (t) , entonces
DX Y (p) = DXp Y = Xp (Y 1); : : : ; Xp (Y n) =
!
n di @Y n
n di @Y 1
X
X
=
i j(0); : : : ;
i j(0) =
dt
@r
dt
@r
j
0
j
0
i=1 id=1(Y 1 )
n
d(Y ) (0) :
(0)
;
:
:
:
;
=
dt
dt
Para la generalizacion de la denicion de derivada covariante o conexion a una
variedad diferenciable M, exigiremos la existencia de un operador r que asigna a
campos de vectores X; Y un campo de vectores rX Y , que satisfaga a las cuatro
propiedades precedentes, enunciadas para la conexion natural en IRn. Esto es, si
designamos por X(M) el modulo de los campos de vectores diferenciables sobre M,
damos la siguiente denicion:
Denicion 5.2 Una conexion lineal r en M es una aplicacion
r : X(M) X(M) ! X(M), (X; Y ) 7! rX Y , vericando
A1 : rX + Y Z = rX Z + rY Z
A3 : rfX Y = f rX Y
A2 : rX (Y + Z ) = rX Y + rX Z A4 : rX fY = (Xf )Y + f rX Y
donde f; g 2 F(M) (funciones diferenciables). rX Y se lee derivada covariante
de Y con respecto a X .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
145
Ejemplo 5.3 Observese que puede existir mas de una conexion lineal sobre una
variedad diferenciable. Y como ejemplos de existencia de conexiones lineales sobre
variedades tenemos:
1) La conexion natural D en IRn. Ver pagina 143.
2) La conexion r sobre una supercie M de IR3 , denida a partir de la conexion
natural y el producto interior en IR3, considerando el campo de vectores normal
unitario N sobre M y deniendo
rX Y = DX Y DX Y; N N
es decir, el campo de vectores rX Y esta denido descomponiendo DX Y en sus
unicas componentes tangente y normal relativas al plano tangente a M. r satisface
las propiedades que caracterizan a una conexion lineal sobre M; as el producto
escalar y la conexion natural de IR3 inducen una conexion en la supercie M.
3) Si U; ' (x1 ; : : : ; xn ) es una carta local en una variedad diferenciable
M; sobre el abierto U , con la estructura de variedad inducida, se puede denir una
!
n
X
@
conexion lineal, poniendo, para X; Y campos de vectores sobre U Y = Y i @xi ,
n
i=1
X
rX Y = X (Y i ) @x@ i :
i=1
4) Si en una variedad M, n{dimensional, existen n campos de vectores linealmente independientes X1; : : : ; Xn (los vectores fX1 (x); : : : ; Xn(x)g, linealmente
independientes para todo x 2 M, dcese entonces que la variedad es paralelizable),
podemos denir en!M una conexion lineal poniendo, para campos de vectores X e
n
X
n
Y Y = Y i Xi ,
X
rX Y = X (Y i )Xi :
i=1
i=1
5) Toda variedad diferenciable paracompacta admite una conexion lineal.
En efecto, sea fV g un recubrimiento abierto localmente nito de M, y supongamos que ff g es una particion de la unidad subordinada a tal recubrimiento; es
decir, las funciones f son funciones reales diferenciables con valores comprendidos
entre 0 y 1, tales que sopPf V (la clausura de los puntos donde f no se anula
esta contenida en V ) y f = 1. Si r es la conexion lineal en la carta (V ; '),
como en 3), ponemos
X
r = f r ;
entonces, al tener esta suma sentido, r es una conexion lineal en M.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
146
5 Diferentes enfoques de conexiones lineales
5.1 Enfoque axiomatico
El enfoque de conexiones que sigue es debido a Koszul. La denicion que vamos
a dar esta justicada al comienzo de este tema y corresponde a la Denicion 5.2.
Una conexion lineal sobre M es una aplicacion
r : X(M) X(M) ! X(M), (X; Y ) 7! rX Y , vericando
1)
2)
3)
4)
rX + Y (Z ) = rX Z + rY Z
rX (Y + Z ) = rX Y + rX Z
rfX (Y ) = f rX Y
rX (fY ) = (Xf )Y + f rX Y
donde f 2 F(M) (funcion diferenciable).
Si (x1 ; : : : ; xn ) es un sistema de coordenadas en un entorno coordenado U , y
f @x@ 1 ; : : : ; @x@n g son los campos de vectores coordenados, denimos las funciones kij
sobre U (que llamaremos coecientes de la conexion) por
n
X
@
k @
(1 i; j n):
(5.1)
r @ i @xj =
ij @xk
@x
k=1
Si D es la conexion natural sobre IRn (ver pagina 143) y si X; Y 2 X(IRn),
entonces
DX Y DY X = [X; Y ]:
Pero esto no es cierto en general. Si r es una conexion lineal sobre M, denimos
las siguiente aplicacion
T : X(M) X(M) ! X(M)
(X; Y ) 7! T (X; Y ) = rX Y
rY X [X; Y ]
Se ve facilmente, usando las propiedades de r y del corchete de campos de
vectores, que T es F(M){lineal y, por tanto, dene un campo de tensores de tipo
(1,2), sobre M, al que se le denomina tensor torsion.
Respecto a un sistema coordenado U; ' (x1 ; : : : ; xn ) las componentes del
campo de tensores torsion vienen dadas por las funciones
Tijk =
k
ij
k:
ji
Se deduce que r tiene torsion nula si y solo si sus coecientes, relativos a un
sistema coordenado, son simetricos respecto de sus subndices. Es por lo que se
suele decir a veces que una conexion sin torsion (con tensor torsion nulo) es simetrica.
Aunque es preferible decir conexion sin torsion, ya que cuando los coecientes de
una connexion con torsion nula se expresan con respecto a una referencia arbitraria
(distinta de la formada por los campos de vectores coordenados), entonces los coecientes no son simetricos en general.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.1 Enfoque axiomatico
147
Si consideramos de nuevo la conexion natural D sobre IRn y si X; Y; Z 2 X(IRn),
se verica
DX (DY Z ) DY (DX Z ) = D[X; Y ]Z:
Pero, esto tampoco es cierto en general, por lo que si r es una conexion lineal
sobre M, denimos la siguiente aplicacion, denominada curvatura:
R : X(M) X(M) X(M) ! X(M)
(Z; X; Y ) 7! R(X; Y )Z = rX rY Z rY rX Z r[X; Y ]Z:
Se trata de una aplicacion F(M){lineal, por lo que dene un campo de tensores
de tipo (1,3).
Respecto a un sistema coordenado U; ' (x1 ; : : : ; xn ) las componentes del
campo tensorial R son
@ @ @ X
n
R @xk ; @x` @xj = Rijk` @x@ i ;
i=1
siendo
n
@ ikj X
+
@x` h=1
@ i
Rijk` = @x`jk
h i
`j kh
h i :
kj `h
Para problemas locales relativos a conexiones, se pueden transformar sus propiedades a ciertas propiedades de formas diferenciales:
Sean r una conexion lineal sobre una variedad diferenciable M n{dimensional, U
conjunto abierto (pudiendo ser un abierto coordenado) de M y fE1; : : : ; Eng una base
de campos de vectores diferenciables sobre U . Consideremos el conjunto f1 ; : : : ; n g
de 1{formas diferenciables sobre U , que constituyen la base dual de fE1; : : : ; Eng en
cada punto de U .
Se denominan formas de conexion a las n2 1{formas ji sobre U asociadas a r y
a la base fE1; : : : ; Eng en cada punto de U por
rX Ej =
n
X
i=1
ji (X )Ei :
8X 2 X(U ):
Las ji son lineales, por la propiedad 1) de la conexion r, y son diferenciables,
ya que si X 2 X(U ), se tiene rX Ej 2 X(U ) y as ji (X ) = i (rX Ej ) 2 F(U ).
Las 1{formas de conexion ji estan relacionadas con los coecientes de la conexion
respecto a la base fE1; : : : ; Eng por ki (Ej ) = ijk .
Los campos de tensores torsion y curvatura pueden tambien expresarse a traves
de formas diferenciales asociadas a una base de campos de vectores fE1; : : : ; Eng
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
148
5 Diferentes enfoques de conexiones lineales
sobre un abierto U : Denimos las 2{formas y (denominadas respectivamente
forma torsion y forma curvatura) sobre U , si X; Y 2 X(U ), por
T (X; Y ) =
n
X
i (X; Y )Ei:
i=1
n
X
R(X; Y )Ej =
i=1
ij (X; Y )Ei :
Las formas diferenciales i ; ji ; i; ij , estan relacionadas por las ecuaciones de
estructura de Cartan, que son equivalentes a la denicion de los tensores torsion y
curvatura. Dichas ecuaciones son (Ejercicios 149 y 150):
n
X
i
d = j ^ ji + i:
j =1
(1a ecuacion de estructura)
n
X
i
dj = jk ^ ki + ij :
k=1
(2a ecuacion de estructura)
5.2 Enfoque tensorial o clasico
Derivada covariante de campos de vectores
Pasamos a generalizar el concepto de derivadas parciales en espacios eucldeos,
a cualquier espacio con coordenadas arbitrarias.
En una variedad M, consideremos un campo de vectores diferenciable X , que
respecto a un sistema de coordenadas (U; (x1 ; : : : ; xn)) se expresa por (1) X = X i @x@ i ;
pues bien, las funciones diferenciables que resultan al hallar las derivadas parciales
de las componentes del campo X respecto de cada una de las coordenadas en cada
sistema coordenado, no constituyen, en general, las componentes de un tensor de
tipo (1,1). En efecto, si (U; (x1 ; : : : ; xn)) es otro sistema coordenado, con puntos
Suprimiremos el smbolo del sumatorio, adoptando el convenio de Einstein, segun el cual, ndices
en factores distintos de un mismo sumando colocados uno arriba y otro abajo, indica sumatorio en
todo el rango del ndice.
(1)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.2 Enfoque tensorial o clasico
149
comunes con el anterior, y respecto al cual X = X i @ i se sigue, teniendo en cuenta
@x
la ley de transformacion relativa a este cambio de coordenadas
@xi ;
X i = X j @x
j
(5.2)
que las derivadas parciales se transforman segun la relacion:
@X i = @ X ` @xi @xk = @X ` @xi @xk + X ` @ 2 xi @xk :
(5.3)
@x` @xj @xk @x` @xj
@xk @x` @xj
@xj @xk
i
Luego las funciones @X
@xj , no son las componentes de un tensor pues no cumplen
la ley relativa al cambio de coordenadas (ver pag. 69).
Esto mismo ocurre para cualquier campo tensorial: sus derivadas ordinarias no
son en general, las componentes de un tensor. Se presenta por tanto el problema
de ver si es posible generalizar la operacion de derivacion parcial de manera que,
aplicada a tensores, de como resultado nuevos tensores. A esta nueva operacion le
llamaremos derivacion covariante.
La condicion que impondremos, de antemano, a esta derivacion covariante es
que respecto del producto de tensores se comporte como derivada ordinaria.
Comenzaremos con un campo de vectores X . De su ley de transformacion relativa
al cambio de coordenadas (5.2), se deduce que las derivadas parciales se transforman
segun (5.3), que no es la ley de transformacion de tensores.
Se trata de ver si es posible a~nadir algo lo mas sencillo posible, a las derivadas
i
ordinarias @X
j , para que el resultado sea un tensor.
@x
El termino que se agregue puede depender de las coordenadas (x1 ; : : : ; xn) del
punto donde esta aplicado el vector y del vector mismo, es decir de sus componentes
X i . Por simplicidad, ensayamos el caso en que dicho termino a a~nadir dependa
linealmente de las componentes del vector; es decir, el caso en que el termino a
i
agregar a las derivadas parciales @Xj , sea de la forma ijk X k , donde ijk sean
@x
funciones diferenciables en U .
La suma obtenida sera:
i
X;ij = @X
@xj +
i Xk:
jk
(5.4)
Las n3 funciones ijk pueden ser arbitarias, con tal que X;ij sean las componentes
de un tensor (en el cual el ndice j sera covariante; de aqu el nombre de derivada
covariante). Para ello, su ley de transformacion debe ser
@xj
X ; = X;ij @x
@xi @x
o
k @x
X;ki = X ; @x
@x @xi
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
150
de donde,
5 Diferentes enfoques de conexiones lineales
@X k + k X j = @X +
ij
@xi
@x
y usando (5.2) y (5.3), resulta
X
!
@xk @x
@x @xi
@X @x @xk + @ 2 xk @x X + k X @xj = @X @xk @x + X @xk @x )
ij @x
@x @x @xi @x @xi
@x @xi @x @x @x @xi
@xk @x
j
@ 2 xk @x X = 0:
k @x
ij @x @x @x @xi
@x @xi
Expresion que tiene que ser nula para cualquier campo de vectores X (es decir,
las funciones kij a obtener deben servir para cualquier campo de vectores), luego
tenemos las n ecuaciones
j
2 xk @x
@x
@
@xk @x
k
( = 1; : : : ; n):
@x @xi = ij @x + @x @x @xi
De estas ecuaciones, podemos despejar las funciones , como soluciones de
este sistema lineal, cuyos coecientes forman una matriz de determinante no nulo
(el jacobiano de la transformacion de coordenadas), obteniendose:
i j 2 k
k @x @x @x + @ x @x :
=
ij @x @x @xk @x @x @xk
(5.5)
Por consiguiente, si se tienen n3 funciones kij que, mediante un cambio de coordenadas, se transforman segun (5.5), las expresiones de X;ij , dadas por (5.4), son las
componentes de un campo de tensores de tipo (1,1), cualquiera que sea el campo de
vectores X .
Dar una conexion en M consiste en dar n3 funciones kij vericando (5.5), a las
que se les denomina coecientes de la conexion.
i
i k
Al tensor de componentes X;ij = @X
@xj + jk X dadas por (5.4), se le llama
derivada covariante del campo de vectores X .
Utilizando ahora el principio relativo al comportamiento de la derivada covariante
respecto al producto, podemos ver como es la derivada covariante de cualquier campo
de tensores, con la misma conexion kij obtenida con un campo de vectores.
Comencemos viendo, dado que las derivadas parciales de una funcion s son las
componentes de un tensor, que las derivadas covariantes de una funcion coinciden
con las derivadas parciales. En efecto:
Sea f una funcion y X un campo de vectores arbitrario, el producto fX es un
campo de vectores, y su derivada covariante sera
fX i ) + i fX k = @f X i + f @X i + i fX k :
(fX i );j = @ (@x
jk
jk
j
@xj
@xj
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.2 Enfoque tensorial o clasico
151
Pero, segun el postulado admitido sobre la derivada covariante de un producto,
se tiene
i
i k
(fX i );j = f;j X i + fX;ij = f;j X i + f @X
@xj + f jk X ;
que comparada con la anterior, y puesto que X es arbitrario, resulta:
@f :
f;j = @x
j
Tratemos ahora de hallar la derivada covariante de un campo de covectores o
tensor de tipo (0,1); es decir, de una 1{forma. Se tiene la siguiente expresion para
su derivada covariante:
Si ! es una 1{forma, su derivada covariante es el tensor de tipo (0,2) de componentes
j
i
(5.6)
!j;k = @!
@xk kj !i :
En efecto, para un campo de vectores arbitrario X consideremos la funcion denida en cada sistema coordenado por f = X i !i , es facil ver que esta funcion esta bien
denida en todo M. Su derivada covariante coincide con las derivadas ordinarias:
X i !i ) :
(X i !i );k = @ (@x
k
Desarrollando los dos miembros de esta igualdad resulta, teniendo en cuenta el
principio relativo a la derivada covariante del producto:
i
i @!i :
!
+
X
X;ik !i + X i!i;k = @X
i
k
@x
@xk
Y segun la expresion (5.4) de la derivada covariante de un campo de vectores,
tenemos
@X i
i
i
j
i !i;k @X !i X i @!i = 0:
+
X
!
+
X
i
@xk kj
@xk
@xk
Es decir,
i !i + !j ;k
kj
y, como X es arbitrario, resulta:
j
!j;k = @!
@xk
@!j X j = 0
@xk
i !i :
kj
El procedimiento que hemos utilizado para hallar la derivada covariante de una
1{forma, sirve para obtener la derivada covariante de cualquier tensor K . Basta
multiplicar sus componentes por componentes de campos de vectores y 1{formas en
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
152
5 Diferentes enfoques de conexiones lineales
numero conveniente para obtener una funcion, y aplicar luego el hecho de que para
funciones, la derivada parcial ordinaria y la derivada covariante coinciden.
As, si K es un tensor de tipo (p; q), tomemos q campos de vectores X1 ; : : : ; Xq ,
p 1{formas 1 ; : : : ; p y la funcion:
Kji11jipq X1j1 Xqjq i11 ipp :
De donde, hallando la derivada covariante (utilizando el postulado de la derivada
de un producto) y la derivada ordinaria, e igualando las relaciones obtenidas, dada
la arbitrariedad de los campos y 1{formas tomados, resultara:
Kji11jipq ;k =
@Kji11jiqp
@xk +
i K i1 i 1 `i+1 ip
k` j1 jq
h K i1 ip
kj j1 j 1 hj+1 jq :
(5.7)
Podemos ahora relacionar el concepto de conexion dado aqu con el enfoque
axiomatico dado en el parrafo anterior:
La formula (5.1) dene los coecientes de la conexion kij , los cuales estan sujetos
a la ley de transformacion (5.5).
Recprocamente, dado un sistema de componentes kij para cada sistema coordenado (U; (x1 ; : : : ; xn )) en M que estan sujetos a la ley de transformacion (5.5), la
formula (5.1), junto con las propiedades formales del comportamiento de la derivada
covariante respecto al producto, permite denir (rU )X Y para todo campo de vectores en un entorno coordenado U . Para campos de vectores X e Y en M, denimos
el campo de vectores rX Y sobre M poniendo
rX Y (x) = (rU )X U YU (x)
donde XU e YU son las restricciones de X e Y al entorno U conteniendo a x; el
termino de la derecha es independiente de la eleccion del entorno coordenado U que
contiene a x, como facilmente se verica, en virtud de (5.5).
Tensores torsion y curvatura
De las relaciones (5.5) que expresan los coecientes de una conexion sobre una
variedad M, respecto a diferentes sistemas coordenados, resulta que dichos coecientes ijk no son las componentes de un tensor de tipo (1,2); sin embargo, s es un
tensor el que tiene por componentes:
Tjki =
i
jk
i :
kj
(5.8)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.2 Enfoque tensorial o clasico
153
El tensor as obtenido se denomina tensor torsion.
Otro tensor muy importante en una variedad con una conexion, se obtiene buscando las condiciones para que las derivadas covariantes segundas sean independientes del orden de derivacion.
Consideremos, por ejemplo, el campo de vectores X y el campo de tensores de
tipo (1,1) cuyas componentes son las derivadas covariantes de X , es decir, X;ik . Las
derivadas covariantes de este seran, segun (5.7)
X;ik` =
@X i
i j
@xk + kj X
;`
=
2 X i @ ikj j i @X j
h
@
h j
= @xk @x` + @x` X + kj @x` + i`h @X
@xk + kj X
Analogamente, invirtiendo el orden de derivacion, resulta
2 X i @ i`j j i @X j i @X h
@
i
h
j
X;`k = @x` @xk + @xk X + `j @xk + kh @x` + `j X
Restando, miembro a miembro, resulta
X;ik`
X;i`k =
@ ikj
@x`
@ i`j
@xk +
h i
kj `h
h i
`j kh
!
h
`k
@X i
@X i
h
k`
i j
@xh + hj X
i j
@xh + hj X
:
:
X j + Tk`h X;ih :
Poniendo
nos queda
@ i
Rijk` = @xkj`
@ i`j
@xk +
h i
kj `h
h i ;
`j kh
(5.9)
X;ik` X;i`k = Rijk`X j + Tk`h X;ih :
(5.10)
Lo que nos permite armar que las n4 funciones Rijk` son componentes de un
campo de tensores, ya que en (5.10) tanto el primer miembro como Tk`h X;ih son
componentes de tensores para cualquier campo de vectores X .
Al tensor de tipo (1,3) de componentes Rijk` se le denomina tensor curvatura.
Si en vez de un campo de vectores X se parte de un campo de tensores arbitrario,
al hallar las derivadas covariantes cruzadas se obtiene una expresion del tipo (5.10).
Luego, podemos armar:
\En general, no se puede invertir el orden en la derivada covariante".
\Para que las derivadas covariantes segundas de cualquier campo de tensores
sean independientes del orden de derivacion es necesario y suciente que los tensores
de curvatura y de torsion sean nulos".
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
154
5 Diferentes enfoques de conexiones lineales
Conexion de Riemann
A partir del producto eucldeo en IR3, usando el isomorsmo Tp(IR3 ) ' IR3 ,
podemos realizar las operaciones basicas, como calcular la longitud de un vector
tangente o los angulos entre vectores tangentes a IR3.
La teora de supercies en IR3 , ci~nendonos a su forma clasica inspirada en los
trabajos de Gauss, quien en 1827 expuso la geometra intrnseca de una supercie
en IR3 (es decir, la geometra observada por un habitante de ella), solo depende del
producto escalar de vectores tangentes a la supercie.
Hacia 1854, Riemann generaliza estos casos especiales e introduce la geometra
sobre una variedad arbitraria n{dimensional, para lo que es necesario denir un
producto interior en cada espacio tangente.
Bajo el impulso de la teora de la relatividad general de Einstein (1915), una
mayor generalizacion se hace necesaria: la condicion de denido positivo del producto
interior se debilita a solamente exigir no degenerado. Para ello denimos un tensor
metrico g sobre una variedad M, como un campo de tensores de tipo (0,2) sobre
M, simetrico, no degenerado y de ndice constante. En otras palabras, g es una
asignacion diferenciable que a cada punto x 2 M le asocia un producto escalar gx
en el espacio tangente Tx(M) y el ndice de gx es el mismo para todo x 2 M. Una
variedad semi{riemanniana, a la que llamaremos simplemente espacio de Riemann,
es una variedad provista de un tensor metrico g. Como caso particular tenemos que,
si el ndice = 0, se trata de una variedad de Riemann: cada gx es un producto
interior (denido positivo) sobre Tx(M), y si = 1 y 2 n = dim M, M es una
variedad de Lorentz.
Para denir una derivada covariante se necesita una conexion. Se trata de ver
ahora si del tensor metrico g de un espacio riemanniano, se puede obtener una
conexion que permita la operacion de derivacion covariante y a partir de ella, obtener
un tensor curvatura.
Vamos a demostrar que tal conexion se puede obtener y que ademas se pueden
exigir las siguientes condiciones:
1) Que la conexion sea simetrica; es decir, que su tensor torsion Tjki = ijk ikj
sea nulo.
2) Que la derivada covariante del tensor metrico g, gij;k , obtenida mediante la
conexion buscada, sea nula.
Para ello supongamos 2) y de (5.7), expresion que da la derivada covariante de
un tensor arbitrario, resulta:
ij
h ghj
h gih ;
0 = gij;k = @g
ki
kj
k
@x
de donde obtenemos por permutacion circular
@gij = h g + h g
@gjk = h g + h g
@gki = h g + h g :
hj
ih
hk
jh
ki
kj
ij
ik
jk hi
ji kh
k
i
@x
@x
@xj
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.2 Enfoque tensorial o clasico
155
Restando las dos ultimas relaciones de la primera y teniendo en cuenta la condicion impuesta 1), simetra de los coecients de la conexion, ijk = ikj , resulta:
h gkh = 1
ij
2
@gjk @gki @gij @xi + @xj @xk ;
de donde, dado que el tensor metrico g es no degenerado, podemos despejar los
coecientes ijk , obteniendose:
k = 1 g kh @gjh + @gih @gij ;
(5.11)
ij 2
@xi @xj @xh
donde los gij son los coecientes de la matriz inversa de la formada con los gij .
Por lo que si existe una conexion que cumple las condiciones 1) y 2), ella debe
estar dada por (5.11), a la que se le denomina conexion riemanniana. Solo queda
por probar que estas expresiones de los ijk (denominados smbolos de Christoel
de segunda especie) son de hecho las componentes de una conexion. Para lo cual,
despues de una transformacion de coordenadas debe comportarse de acuerdo con la
ley dada por las formulas (5.5). Lo cual no tiene dicultad establecerlo, usando las
correspondientes leyes de transformacion para los coecientes gij y gij .
Tensores deducidos del tensor curvatura por contraccion
El tensor curvatura de un espacio de Riemann es, ver (5.9)
@ i @ i
Rijk` = @xkj` @x`jk + hkj i`h h`j ikh ;
donde las componentes de la conexion ijk , son ahora los smbolos de Christoel de
segunda especie.
Por contraccion del ultimo ndice del tensor curvatura se obtiene el tensor
Sij = Rhijh :
Por contraccion del ndice intermedio, resulta el mismo tensor salvo signo. Y,
nalmente, por contracion del primer ndice, resulta
@ iji @ iki
i
Rijk = @xk @xj ;
que se comprueba facilmente que es nulo. Luego resulta que en un espacio de Riemann:
\Por contracion de ndices del tensor curvatura se puede obtener un solo tensor
no nulo el cual es simetrico y que le denominamos tensor de Ricci".
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
156
5 Diferentes enfoques de conexiones lineales
A partir del tensor de Ricci se puede construir la funcion, denominada curvatura
escalar del espacio:
r = gij Sij :
Otro tensor importante es el tensor gravitatorio de Einstein denido por
Gij = Sij 12 rgij ;
el cual es simetrico y tiene la propiedad de tener la divergencia nula, o sea
Gij;i = 0
donde Gij = gihgkj Gkh .
La demostracion de este hecho, fundamental en la teora de la relatividad general
de Einstein, se lleva a cabo utilizando la llamada identidad de Bianchi, relativa a las
derivadas covariantes del tensor curvatura:
Rijk`;h + Rij`h;k + Rijhk;` = 0:
5.3 Conexiones denidas por caminos
Sea M una variedad diferenciable de dimension n. Los espacios vectoriales tangentes Tx (M) y Ty (M) en dos puntos x e y de M son isomorfos, ya que ambos son de
dimension n, pero no canonicamente isomorfos. Ahora bien, con el n de obtener un
isomormo determinado que relacione Tx(M) con Ty (M), es necesrio introducir una
estructura adicional sobre la variedad, que llamaremos conexion. E sta \conecta" los
espacios tangentes en diferentes puntos de la variedad. Tal conexion sera obtenida,
por ejemplo, por una aplicacion lineal no singular que lleve una base Ex de Tx(M)
sobre una base Ey de Ty (M).
Sea una curva diferenciable sobre M que une los puntos x e y. Necesitamos
denir un isomorsmo xy : Tx(M) ! Ty (M) que dependa solo de los puntos x e y y
de la curva que los une. Le exigimos ademas las condiciones siguientes:
1) Si z es un punto de entre x e y, entonces se requiere que xy = zy xz .
2) yx es el isomorsmo inveros de xy : yx = xy1.
Supongamos que los puntos x e y estan en un entorno coordenado U que contiene
a la curva . Entonces puede ser representada por las ecuaciones
xi = xi (t)
donde (0) = x y (1) = y.
(0 t 1)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.3 Conexiones denidas por caminos
157
Tratamos de encontrar un isomorsmo t : Tx(M) ! T (t)(M). Fijadas unas
bases, t puede ser representado por una matriz no singular At y, si v0 2 Tx(M),
podemos escribir
vt = At v0 2 T (t)(M):
Supongamos ahora que los elementos de At , considerados como funciones de t
son diferenciables; entonces, diferenciando la ultima ecuacion, obtenemos
v_t = A_ t v0 = A_t At 1 vt ;
_
y poniendo !t en vez de la matriz At At 1 , obtenemos
v_t + !tvt = 0:
Supongamos ahora que ! depende solo de x(t) y de x_ (t). Tenemos entonces la
ecuacion diferencial
v_ + !(x; x_ )v = 0:
(5.12)
Ahora bien, un resultando estandar de la teora de ecuaciones diferenciales lineales de primer orden asegura que existe una unica solucion con la condicion inicial v0
cuando t = 0.
As dado un vector v0 2 Tx(M) da lugar a un campo de vectores a lo largo de .
Es necesario, no obstante, que el isomorsmo t sea independiente de la parametrizacion particular de ; es decir, la ecuacion diferencial debe ser invariante respecto
a un cambio de parametro. De la forma de dicha ecuacion, esto sera posible si !(x; x_ )
es homogenea de grado 1 en x_ .
As vemos que un isomorsmo entre los espacios tangentes en puntos de la curva se obtiene asociando a cada punto de una matriz ! cuyos elementos son homogeneos
de grado uno en x_ .
Consideremos ahora el efecto que produce sobre la expresion local de ! un cambio de coordenadas x = x (x1 ; : : : ; xn ). Requerimos que la ecuacion (5.12) sea
invariante por un tal cambio.
Tenemos (2)
2
_v = d @x i vi = @ ix j x_ j vi + @x i v_ i :
dt @x
@x @x
@x
Entonces
o sea
De donde resulta
2 x j i @x i j
!v = @x@ i @x
j x_ v
@xi !j v
@x @ 2 x
@x
j
i
! @xk + @xk @xj x_ !k @xi vk = 0
En esta Seccion, como hemos hecho en la anterior, omitiremos ocasionalmente los signos de
sumatorio.
(2)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
158
5 Diferentes enfoques de conexiones lineales
@x
@x
i
=
!
! @xj
j @xi
@ 2 x x_ i
@xj @xi
(5.13)
Luego, una conexion esta denida a lo largo de una curva , relativa a un sistema
cordenado (x1 ; : : : ; xn ), por una matriz (!ji ). Las componentes de la matriz (! )
que determina la misma conexion relativamente al sistema coordenado (x1 ; : : : ; xn)
estan dadas por (5.13).
Consideraremos un caso particular, que es cuando ! es lineal en x_ ; se dice entonces que ! es una conexion lineal. Y que t : T(0)(M) ! T(t)(M) es el desplazamiento paralelo (o transporte paralelo) a lo largo de desde (0) a (t).
Si ponemos
!ji =
i x_ k ;
jk
(5.14)
a las funciones ijk se denominan coecientes de la conexion. Y de la formula (5.13)
se deduce que la ley de transformacion de los coecientes de la conexion respecto a
un cambio de coordenadas es
@x @x
i @x
=
@xj @xk
jk @xi
O bien
@ 2 x :
@xj @xk
i
i
2 i = @x @x @x + @ x @x :
jk
@xj @xk @x @xj @xk @x
(5.15)
Para relacionar este enfoque, para el caso particular de conexiones lineales, con
el axiomatico de Koszul, bastara establecer el siguiente resultado, en el que r es la
conexion en M con coecientes ijk cumpliendo (5.15):
\Sea Y un campo de vectores sobre una curva en una variedad diferenciable n{dimensional M ( : [0; 1] ! M) con (0) = x y 0 (0) = Xx ,
entonces
1 1 Y (t) Y (0) ;
rXx Y = tlim
!0 t t
donde t : T(0)(M) ! T(t)(M) es desplazamiento paralelo a lo largo de
la curva desde (0) a (t)."
Para demostrar
este resultado, supongamos que la curva queda en un entorno
1
n
U; (x ; : : : ; x ) y denotamos tambien por Y un campo de vectores sobre U extension del campo de vectores Y dado sobre . Entonces Y = Y i @x@ i .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.3 Conexiones denidas por caminos
159
τ−h1(Y(h))=Z(0)
Zk
Y(h)=Z(h)
Y(0)
Xx
h
0
t
0
ξ(k)
h
Fig. 5.1: Transporte paralelo
Fijando un h, sea Z el campo de vectores paralelo a lo largo de , tal que
Z (0) = h 1(Y(h) ), se tiene entonces que Z (h) = Y(h). Ponemos
Z (t) = Z i(t) @x@ i :
j(t)
La caracterizacion de ser Z paralelo es, segun (5.12) y teniendo en cuenta (5.14)
dZ k (t) + k (t)Z i(t) dj (t) = 0;
ij
dt
dt
vericando Z k (h) = Y k (h) (k = 1; : : : ; n).
Aplicando el teorema del valor medio, existira para cada k = 1; : : : ; n, un (k) 2
]0; h[, tal que
k
dZ
k
k
Z (h) Z (0) = h dt ((k)):
Como
1 1(Y ) Y = lim 1 Z k (0) Y k (0) @
lim
(0)
h!0 h
h!0 h h (h)
@xk j(0);
resulta para cada componente
1 Z k (0) Y k (0) = 1 Z k (h) h dZ k ((k)) Y k (0) =
h
h
dt
k
dZ k (k)
1
k
= h Y (h) Y (0)
dt ( ) =
j
(k)
= h1 Y k (h) Y k (0) + kij ((k)) Z i((k)) d
dt ( ):
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
160
5 Diferentes enfoques de conexiones lineales
Cuando h ! 0 (que asocia diferentes Z para cada h) resulta:
=
dY k (t)
1 1 (Y ) Y
lim
(0) =
t!0 h h (h)
(0) + kij
j @
d
i
(0) Y (0) (0)
dt
dt
Con lo queda probado el resultado enunciado.
@xk j(0) = r0 Y (0):
5.4 Enfoque por brados
Distribucion horizontal en T (M)
Si T (M) es el espacio brado tangente sobre una variedad diferenciables M de
dimension n, cada espacio vectorial Tx(M) (con la estructura diferenciable canonica)
es una subvariedad regular n{dimensional de T (M), al ser la proyeccion canonica
: T (M) ! M submersion.
Un vector tangente a T (M) en un punto v 2 T (M) se dice que es vertical si es
tangente a la subvariedad T(v)(M).
Denotaremos por Vv el conjunto de vectores verticales en v 2 T (M). Existe una
caracterizacion de vectores verticales a traves de la aplicacion :
W 2 X(T (M)) es vertical () (W ) = 0:
Para todo 2 IR f0g, consideremos el difeomorsmo : T (M) ! T (M) denido
por (v) = v. A la correspondiente aplicacion inducida tambien la denotaremos
por , esto es : Tv (T (M)) ! Tv (T (M)).
Dada una conexion lineal r sobre M, nos permitira asignar a cada v 2 Tx(M) un
subespacio vectorial Hv de Tv (T (M)) de dimension n, al cual llamaremos subespacio
horizontal pues no va a contener vectores verticales salvo el vector nulo. Dichos
subespacios deberan tener las siguientes propiedades:
1) Tv (T (M)) = Hv Vv
2) (Hv ) = Hv ( 2 IR f0g)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
161
T(M)
v
H
v
Hv
Y
π
M
π(v)=x
v
Fig. 5.2: Distribucion horizontal en T (M)
3) H : v 7! Hv es una distribucion diferenciable.
Para denir Hv , procedemos de la siguiente forma: Escojamos un punto (vector
en x) v 2 T (M) y supongamos que tenemos un campo de vectores Y 2 X(M) tal que
Yx = v y ruY = 0; 8u 2 Tx(M):
Recordemos que Y se interpreta como una aplicacion Y : M ! T (M) diferenciable. Consideremos su aplicacion inducida en x, Y : Tx(M) ! Tv (T (M)); ponemos:
Hv = Y (Tx (M)):
Demostremos que se trata de un subespacio vectorial de dimension n de Tv (T (M)),
que es independiente de la eleccion del campo de vectores Y y que tiene las propiedades requeridas 1), 2) y 3).
Para
una carta U; ' (x1 ; : : : ; xn ) de M alrededor de x 2 M
eello, elegimos
y sea U ; 'e (xe1 ; : : : ; xe2n ) la correspondiente carta inducida en T (T (M)). Un
n
X
campo de vectores Y sobre M, que en U se expresa por Y = Y k @x@ k , satisface
i=1
las condiciones requeridas si y solo si
n
@Y k (x) + X
@xi
j =1
k (x)Y j (x) = 0;
ij
Y k (x) = vk
(i; k = 1; : : : ; n);
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
162
5 Diferentes enfoques de conexiones lineales
siendo kij los coecientes de la conexion r relativos a la carta U; ' (x1 ; : : : ; xn )
n
X
y v = vk @x@ k (es decir, vk = xen+k (v)).
k+1
Es claro que podemos escoger un campo de vectores satisfaciendo estas condiciones. Entonces
@ @ X
n @Y k
n
X
@
@
Y @xi jx = @ xei jv + @xi jx @ xen+k jv = @ xei jv
vj kij (x) @ xe@n+k jv :
k=1
j;k=1
Estos vectores (que no dependen de la eleccion de Y ) forman una base para Hv ,
que es entonces un subespacio de dimension n de Tv (T (M)).
Los campos de vectores en 1 (U ), denidos por
Ei = @@xei
n
X
j;k=1
( kij )xen+j @ xe@n+k ;
(5.16)
forman una base en cada punto de los subespacios Hv .
1) La aplicacion inducida : Tv (T (M)) ! Tx(M) es suprayectiva, y verica
(Hv ) = Tx(M); por tanto, como dim Hv = dim Tx (M), es inyectiva sobre Hv ; as, el
unico vector de Hv que tiene imagen nula por es el nulo; por lo que Hv \Vv = f0g.
Y entonces Tv (T (M)) = Hv Vv .
2) La aplicacion : Tv (T (M)) ! Tv (T M)), verica (Ei jv ) = Ei jv . Luego
(Hv ) = Hv :
3) La distribucion H : v 7 ! Hv es diferenciable ya que esta generada por los
campos de vectores diferenciables Ei.
El subespacio Hv de Tv (T (M)) as obtenido se dice que es horizontal. Un vector
perteneciente al subespacio Hv se dice que es horizontal. Todo campo de vectores
sobre T (M) cuyos representantes son vectores horizontales se denomina campo de
vectores horizontal. A la distribucion H se le denomina distribucion horizontal sobre
T (M) o bien se dice que H es una conexion en el brado tangente T (M).
Se tiene el siguiente resultado facil de probar que relaciona la integrabilidad de
la distribucion horizontal con la curvatura de la conexion que la determina:
\Sea r es una conexion lineal sobre una variedad M y E1; : : : ; En los campos de
vectores sobre una carta inducida en T (M) denidos por (5.16) mas arriba. Entonces
si r tiene curvatura nula se verica que
[Ei; Ej ] = 0: (i; j = 1; : : : ; n)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
163
(Es decir, la distribucion horizontal es integrable)."
Conexion en M determinada por una distribucion horizontal en T (M)
Veamos ahora el recproco de la construccion anterior; es decir, si tenemos una
conexion en T (M) dada por un distribucion H , vericando:
1) Tv (T (M)) = Hv Vv
2) (Hv ) = Hv ;
8 2 IR f0g
3) H : v !
7 Hv es diferenciable;
entonces podemos dar una conexion en M (segun la denicion de Koszul); es decir,
dar una aplicacion r : X(M) X(M) ! X(M) vericando, 8X; Y; Z 2 X(M) y
8f 2 F(M):
1) rX + Y Z = rX Z + rY Z
2) rX (Y + Z ) = rX Y + rX Z
3) rfX Y = f rX Y
4) rX fY = (Xf )Y + f rX Y:
Dada una conexion H sobre T (M), usaremos la descomposicion en suma directa
Tv (T (M)) = Hv Vv , para denir la componente horizontal hZ y la componente
vertical vZ de un vector Z 2 Tv (T (M)).
Identicando el tangente al espacio vectorial Tx(M) en v con el propio Tx(M), es
decir,
Vv = Tv (Tx(M)) Tx(M);
vZ sera considerado un elemento de Tx(M).
La condicion (2) para H es equivalente a la ecuacion (hZ ) = h((Z )) o a (vZ ) =
v((Z )). Esta ultima, de acuerdo con la identicacion hecha, viene a ser
v((Z )) = vZ
(5.17)
Consideremos ahora un campo de vectores sobre M, Y : M ! T (M), y un vector
Xx 2 Tx(M). Denimos
rXx Y = v(Y (Xx )) 2 Tx(M)
Es claro que r verica las tres primeras propiedades de conexion. Para establecer
la ultima, sea f 2 F(M), entonces
(fY ) (Xx ) = f (x)(Y (Xx)) + Xx(f )Yx ;
(5.18)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
164
5 Diferentes enfoques de conexiones lineales
donde Yx 2 Tx(M) lo identicamos con el tangente a Tx(M) en f (x)Yx , es decir,
Yx 2 Tf (x)Yx (Tx (M)). Para probar esta formula aplicamos la regla del producto para
las derivadas: Si : I ! M es una curva tal que (0) = x y 0 (0) = Xx, entonces
d (fY )((t)) = d f ((t))Y ((t)) = X (f )Y + f (x) Y (X ):
(fY ) (Xx) = dt
x
x
x
dt jt=0
jt=0
Si tomamos ahora la componente vertical en ambos miembros de (5.18) y usando
(5.17), resulta
v (fY ) (Xx ) = v (f (x)(Y (Xx))) + Xx(f )Yx :
rXx (fY ) = f (x)rXx Y + Xx (f )Yx :
As r es una conexion en M (segun Koszul).
Esta conexion r en M determinada por la distribucion H : v 7! Hv en T(M),
da lugar a esta misma distribucion si emprendemos la construccion recproca. En
efecto, si designamos por Hv0 Tv (T (M)) los espacios horizontales determinandos
por la conexion r recien obtenida, resulta que Hv0 = Y (Tx (M)), siendo Y 2 X(M),
tal que
Yx = v y ruY = 0; 8u 2 Tx(M):
Pero ruY = vY(u) = 0; 8u 2 Tx(M) implica que Y (u) 2 Hv ; 8u 2 Tx(M). Luego
Hv0 = Y(Tx (M)) = Hv .
Distribucion horizontal en L(M)
Si M es una variedad diferenciable n{dimensional, consideremos el conjunto
L(M) = p (x; e1 ; : : : ; en ) x 2 M y fe1; : : : ; eng es una base de Tx(M) ;
y sea : L(M) ! M la aplicaci
on proyeccion, denida por (x; e1 ; : : : ; en ) = x.
1
n
Si U; ' (x ; : : : ; x ) es un sistema coordenado
sobre M, sea el sistema coor
1
n
1
n
denado en L(M) Ue ; 'e (xe ; : : : ; xe ; xe1 ; : : : ; xen ) , donde ponemos Ue = 1 (U ) y
2
'e : Ue ! IRn+n homomorsmo coordenado con funciones coordenadas denidas
para p (x; e1 ; : : : ; en ) 2 Ue por
xei (p) = (xi )(p) = xi (x) (i = 1; : : : ; n)
n
X
(j = 1; : : : ; n):
ej = xeij (p) @x@ i
i=1
jx
No tiene dicultad probar que si f(U ; ')= 2 Ag es un atlas para la estructura
diferenciable de M, entonces f(Ue ; 'e)= 2 Ag permite denir una estructura de
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
165
variedad diferenciable sobre L(M). A la que llamaremos brado de referencias lineales
sobre M.
Consideremos ahora las siguientes aplicaciones:
1) Si GL(n; IR) es el grupo lineal general, la aplicacion
: L(M) GL(n; IR) ! L(M)
(p (x; v1 ; : : : ; vn); a) 7 ! (p; a) = pa = (x;
n
X
i=1
ai1vi ; : : : ;
n
X
i=1
ainvi ):
es diferenciable, e induce sendas aplicaciones diferencianbles
a : L(M) ! L(M);
Ra p : GL(n; IR) ! L(M)
p 7! pa
a 7! pa
La aplicacion Ra, aqu denida se denominada traslacion a la derecha.
2) Sea ahora, para cada abierto coordenado U de M, la aplicacion
sU : U ! L(M)
x 7 ! sU (x) = (x; @x@ 1 jx; : : : ; @x@ n jx):
Tambien sU es diferenciable y sU = 1U (identidad en U ). A sU le denominamos seccion local canonica o campo de referencias basico, ya que sU asigna a cada
punto del entorno coordenado U la referencia en ese punto determinada por los
campos de vectores basicos.
3) Finalmente si U es un abierto coordenado de M, consideramos la aplicacion
h : U GL(n; IR) ! Ue = 1(U )
(x; a) 7 ! h(x; a) = sU (x)a:
hU es un difeomorsmo, el cual permite asignar coordenadas a los elementos de
1 (U ). As la referencia canonica tiene las coordenadas de (x; e), e matriz identidad
en GL(n; IR).
El conjunto de todas las referencias lineales en un punto x 2 M, 1(x) = Lx,
es una subvariedad regular de L(M) de dimension n2, a la que denominamos bra
sobre x, y es difeomorfa a GL(n; IR) a traves de la aplicacion
hx : GL(n; IR) ! 1(x) = Lx
a 7 ! sU (x)a:
Un campo de vectores Z 2 X(L(M)) que queda tangente a cada L(p) (Zp 2
Tp(L(p))), es decir, tal que (Zp ) = 0, se dice que es vertical. Denotaremos por Vp
el conjunto de vectores verticales en p 2 L(M).
Sea r una conexion sobre M, vamos ahora a denir a partir de ella una distribucion H : p 7! Hp en el brado de referencias lineales L(M), vericando las
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
166
5 Diferentes enfoques de conexiones lineales
siguientes propiedades:
1) Tp(L(M)) = Hp Vp
2) (Ra) (Hp ) = Hpa
3) H : p 7 ! Hp es una distribucion diferenciable.
Para denir Hp procedemos de la siguiente forma: Escojamos un punto (referencia en x) p 2 L(M), p (x; v1 ; : : : ; vn) y supongamos que tenemos un campo de
referencias (una seccion) s : M ! L(M), s (Y1; : : : ; Yn), fY1; : : : ; Yng son campos
de vectores diferenciables que forman una base del espacio tangente a M en cada
punto, tal que
s(x) = p
y
rus = 0; 8u 2 Tx(M)
donde rus denota (ruY1; : : : ; ruYn). Es claro que podemos escoger un campo de
referencias satisfaciendo estas condiciones. Ponemos
Hp = s (Tx (M)):
Demostremos que se trata de un subespacio vectorial de dimension n de Tp(L(M)),
que es independiente de la eleccion del campo de referencias s elegida y que tiene
las propiedades requeridas 1); 2) y 3).
Para ello elegimos una carta U; ' (x1 ; : : : ; xn ) en M alrededor de x 2 M y
sea la correspondiente carta inducida en L(M ) Ue ; 'e (xe1 ; : : : ; xen ; xe11 ; : : : ; xenn ) . Un
campo de referencias s (Y1 ; : : : ; Yn) sobre M, que en U se expresa por
Y` =
n
X
k=1
Y`k @x@ k
(` = 1; : : : ; n)
satisface las condiciones requeridas si solo si
n
@Y`k (x) + X
@xi
j =1
k Y j (x) = 0;
ij `
Y`k (x) = v`k
(i; k; ` = 1; : : : ; n)
siendo kij los coecientes de la conexion r relativos a la carta U; ' (x1 ; : : : ; xn )
n
X
y v` = v`k @x@ k , es decir, v`k = xek` (p).
k=1
Los teoremas relativos a ecuaciones diferenciales permiten escoger un campo de
referencias satisfaciendo a estas condiciones. Entonces
@ @
n @Y k @
n
X
X
@
k (x)v j @ :
`
=
s @xi jx = @ xei jp +
ij
` @ xek
k
i
i
` jp
k;`=1 @x @ xe` jp @ xe jp j;k;`
Estos vectores (que no dependen de la eleccion de s) forman una base de Hp , el
cual es, entonces, un subespacio vectorial de Tp(L(M)) de dimension n.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
167
Los campos de vectores en Ue = 1(U ), denidos por
Ei = @@xei
n
X
( kij )xej` @ k
@ xe`
j;k;`=1
(i = 1; : : : ; n)
forman una base para cada subespacio Hp .
1) La aplicacion : Tp(L(M)) ! Tx(M) es sobreyectiva y se verica (Hp) =
Tx(M). As, si w 2 Hp \ Vp, usando un campo de referencias s que permita denir
Hp, resulta que existe v 2 Tx(M) tal que s (v) = w. Como ademas w 2 Vp, se tiene
(w) = 0. Luego (w) = (s (v)) = v = 0. Por lo que w = s (v) = 0. Es decir,
Hp no contiene vectores verticales salvo el nulo. Por lo que
Tp(L(M)) = Hp Vp:
2) Sea a 2 GL(n; IR), probemos que (Ra ) (Hp ) = Hpa.
Si s es un campo de referencia que dene Hp, resulta que (sa) Tx (M) = Hpa.
n
n
X
X
Pues si a (aij ), s (Y1 ; : : : ; Yn) y sa ( ai1Yi ; : : : ; ainYi ), al vericarse
rus (ruY1; : : : ; ruYn) = 0, se tiene
ru(sa) i=1
i=1
n
n
n
X
X
X
i
i
i
a1 (ruYi ); : : : ; ain (ruYi ) = 0:
ru( a1 Yi); : : : ; ru( an Yi) =
i=1
i=1
i=1
i=1
n
X
En consecuencia
(Ra) (Hp ) = (Ra) (s (Tx (M)) = (sa) (Tx(M)) = Hpa:
3) La distribucion H : p 7! HP es diferenciable, ya que esta generada por los
campos de vectores diferenciables Ei .
El subespacio Hp de Tp(L(M)) se dice que es horizontal. A los elementos de Hp
se les denomina vectores horizontales. Un campo de vectores sobre L(M) cuyos representantes en cada punto son vectores horizontales se denomina campo de vectores
horizontal. A la distribucion H se le denomina distribucion horizontal sobre L(M) o
se dice que H es una conexion en el brado de las referencias lineales L(M ).
Transporte paralelo deducido por una distribucion horizontal en L(M)
Veamos ahora el recproco de la construccion anterior; es decir, si tenemos una
conexion en L(M) dada por un distribucion H , vericando:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
168
5 Diferentes enfoques de conexiones lineales
1) Tp(L(M)) = Hp Vp
2) (Ra ) (Hp ) = Hpa 8a 2 GL(n; IR)
3) H : p 7! Hp es diferenciable:
Entonces podemos denir el transporte paralelo en M, y por tanto dar una
conexion en M (segun la denicion de Koszul), como se hizo en la Seccion 5.3:
De la propiedad (1) de H , es decir, de Tp(L(M)) = Hp Vp y del hecho de que Vp
es el nucleo de : Tp (L(M)) ! T(p)(M), se sigue claramente que : Hp ! T(p)(M)
es un isomorsmo para cada p 2 L(M ). Consecuentemente, para todo campo de
vectores X sobre M, existe un unico campo de vectores Xb sobre L(M) horizontal y
que se proyecta en X , esto es Xbp 2 Hp y (Xbp) = X(p); 8p 2 L(M). A este campo
de vectores Xb le llamaremos levantamiento horizontal de X .
Una curva diferenciable : [0; 1] ! L(M) se denomina horizontal si sus vectores
tangentes 0(t) son horizontales. Si : [0; 1] ! M es una curva diferenciable en M,
denimos el levantamiento horizontal de a una curva horizontal b : [0; 1] ! L(M)
que se proyecta en , es decir, tal que b = .
Teniendose la existencia del levantamiento horizontal de campos de vectores, se
puede dar el concepto de levantamiento de curvas por una va natural. As si es
una curva en M con campo de vectores tangente T , extendemos T a un campo de
vectores diferenciable a un entorno U de un trozo de curva que no se corte a si misma.
Levantamos T a un campo de vectores horizontal Tb sobre 1 (U ), y tomamos la
curva integral de Tb, para obtener el levantamiento horizontal de .
La justicacion de la denicion de transporte paralelo en L(M ) relativo a la
conexion H que vamos a dar, la encontramos en la construccion que hemos hecho
de una conexion en L(M) a partir de una conexion r en M y del transporte paralelo
asociado a esta. A saber:
Si r es una conexion sobre M, entonces por integracion de las ecuaciones
diferenciales ordinarias (ver Seccion 5.3, (5.12),(5.14))
n
dY k + X
dt i;j=1
i
k Y i dx = 0
ij dt
(k = 1; : : : ; n)
podemos transportar el espacio tangente a lo largo de curvas en M. Si
p (x; e1 ; : : : ; en ) 2 L(M) (refererencia en x) y es una curva en
M con (0) = x, entonces por transporte paralelo denimos una curva
diferenciable
t 7 ! b(t) (t); E1 (t); : : : ; En(t)
en L(M), donde cada Ei es el transporte paralelo de ei = Ei(0) a lo largo
de . Y como se verica que r0 Ei = 0; 8i 2 f1; : : : ; ng resulta que
b0 (t) 2 Hb(t), es decir, b es una curva horizontal.
Lo ultimamente expuesto justica la siguiente denicion:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
169
Sea L(t) = 1 ((t)) es la bra sobre (t), es decir, el conjunto de todas las
referencias lineales de T(t)(M). Denimos
t : L(0) ! L(t)
p 7 ! t(p) = b(t)
donde b es el levantamiento horizontal de , con b(0) = p. Decimos que la aplicacion
t es el transporte paralelo a lo largo de .
Es claro que t Ra = Ra t, pues Ra b es tambien un levantamiento horizontal
por la condicion (2) de H .
Veamos que este desplazamiento paralelo en L(M) pemite denir el transporte
paralelo en M.
Toda referencia en un punto x 2 M, p (x; e1 ; : : : ; en) 2 L(M), determina un
isomorsmo
n
X
n
pe: IR ! T(p)(M) 7! i ei :
i=1
se trata de la aplicacion que cada n{upla de numeros reales le asigna el vector que
tiene esos numeros reales como componentes respecto a la referencia p.
Es facil demostrar que
pfa() = pe(a)
8 2 IRn; 8a 2 GL(n; IR);
donde el producto a, de una matriz de orden n por un elemento de IRn, es denido
de la forma usual.
Si : [0; 1] ! M es una curva en M y v 2 Tx(M), sea b : [0; 1] ! L(M) el
levantamiento horizontal de con valor inicial b(0) = p. El vector v se expresa
de forma unica respecto a la referencia p, es decir, existe un unico 2 IRn tal que
pe() = v. Denimos entonces el transporte paralelo en M sobre la curva , como la
aplicacion (que tambien denotamos por t )
t : Tx(M ) ! T(t)(M )
v 7 ! t(v) = bg
(t)()
esto es, a cada vector v 2 Tx(M) de componentes respecto a la referencia p, se le
asocia el vector en T(t)(M) cuyas componentes respecto a la referencia b(t) son .
Para ver que esta aplicacion esta bien denida, es decir, que no depende del levantamiento horizontal de tomado, consideremos otra referencia en Tx(M) distinta
de p; sera de la forma q = pa, donde a 2 GL(n; IR) es la matriz cambio de base. El
levantamiento de partiendo de q sera entonces Ra b : [0; 1] ! L(M). Por lo que
v = pe() = pe a(a 1 ) = pfa(a 1 ) = qe(a 1 ):
As la denicion de t con respecto a Ra b da
(t)():
t(v) = (R^
(t)a(a 1 ) = bg
(t) a(a 1 ) = bg
a b)(t)(a 1 ) = b]
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
170
5 Diferentes enfoques de conexiones lineales
La aplicacion t : Tx(M) ! T(t)(M) es un isomorsmo entre espacios
vectoriales.
Ya que si tomamos la referencia p de forma que pe (1; 0; : : : ; 0) = v (es decir,
p
g
es la referencia con primer vector v), resulta que t(v) = b(t) (1; 0; : : : ; 0) ; esto
es t(v) es tambien el primer vector de la referencia b(t) en T(t)(M). Se ve que
t : Tx(M) ! T(t)(M) lleva una base de Tx (M) en una base de T(t)(M).
Ya tenemos, por tanto, denido a partir de una conexion H en L(M ) el transporte
paralelo en M. Supongamos ahora que H esta denida por una derivada covariante
r en M, este transporte paralelo dado por H coincide con el que determina r.
En efecto, si es una curva en M, consideremos la curva b en L(M) (levantamiento horizontal) tal que b = y b0 (t) es horizontal. Por denicion de H a
partir de r, esto signica que para algun u 2 Tx(M) = T(t)(M), tenemos
b0 (t) = s (u); con rus = 0;
de hecho u = (s (u)) = (b0 (t)) = 0 (t). Con lo que r0 (t) s = 0. Lo que quiere
decir que los campos de vectores que forman el campo de referencias s son paralelos
a lo largo de con respecto a la conexion r original. Por consiguiente, el transporte
paralelo denido con respecto a la conexion H es el mismo que el transporte paralelo
dado por r. Esto implica que las derivadas covariantes son las mismas.
En la Seccion 5.3 vimos la siguiente expresion, que dene la derivada covariante
de campos de vectores en M en funcion del transporte paralelo:
1 1 (Y ) Y :
rXx Y = hlim
x
!0 h h (h)
Distribucion horizontal en T (M) determinada por una distribucion
horizontal en L(M)
Expondremos a continuacion otra manera de denir la conexion en T (M) a partir
de la conexion en L(M).
Supongamos dada una conexion H en L(M), veamos que dene una distribucion
y solo una K : v 7! Kv sobre T (M) tal que
Tv (T (M)) = Kv Vv 8v 2 T (M)
Para denir Kv0 en un punto dado v0 2 T (M), sea x0 = (v0 ) la proyeccion
sobre M y po 2 Lx0 L(M) una referencia en el punto x0. Existe un unico 0 2 IRn
que representa las componentes de v0 respecto a p0, es decir, pe0(0 ) = v0. Fijado 0 ,
determina una aplicacion
h0 : L(M) ! T (M) p 7! h0 (p) = pe(0)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
171
esto es, h0 (p) es el vector en (p) con componentes 0 respecto a la referencia p.
denimos
Kv0 = (h0 ) (Hp0 )
Veamos que este subespacio no depende de la eleccion de p0 sobre Lx0 . En efecto,
si q0 es otra referencia en x0, q0 = p0a para a 2 GL(n; IR), existe un unico 0 2 IRn
tal que qe0 (0) = v0 . Entonces
pe0(0 ) = v0 = qe0 (0) = pg
0 a(0 ) = pe0 (a 1 0 ) ) 0 = a0 ;
as, para todo p
]1 (0 ) = h (pa 1 ) = (h Ra 1 )(p);
h0 (p) = pe(0 ) = pe(a0 ) = pa
0
0
luego
(h0 ) (Hq0 ) = (h0 Ra 1 ) ((Ra ) Hp0 ) = (h0 ) (Hp0 ):
La aplicacion (h0 ) restringida a Hp0 es inyectiva. Pues si Zp0 2 Hp0 tal que
(h0 ) (Zp0 ) = 0, resulta si denotamos momentaneamente por t : T (M) ! M
y por r : L(M) ! M las respectivas proyecciones canonicas, se tiene entonces
(t ) (h0 ) (Zp0 ) = (r ) (Zp0 ) = 0. Es decir que tambien Zp0 2 Vp0 . Y como,
por la propiedad (1) de H , Vp0 \ Hp0 = f0g, concluimos que Zp0 = 0, de donde la
inyectividad.
Luego dim Kv0 = dim Hp0 = dim M. Tambien se tiene que Vv0 \ Kv0 = f0g,
en efecto, si Yv0 2 Vv0 \ Kv0 se tiene que (t ) (Yv0) = 0 y 9Wp0 2 Hp0 tal que
(h0 ) (Wp0 ) = Yv0 , de donde se deduce que t h0 (Wp0 ) = (r ) (Wp0 ) = 0; as
Wp0 2 Hp0 \ Vp0 , por lo que tiene que ser Wp0 = 0 y, por tanto, (h0 ) (Wp0 ) =
Yv0 = 0. Concluimos que
Tv0 (T (M)) = Kv0 Vv0
Demostremos ahora que
(Kv0 ) = Kv0 ;
8 2 IR f0g
En virtud de la denicion del subespacio Kv0 , esto es equivalente a establecer
que h0 = h0 , pero ( h0 )(p) = pe(0) = pe(0) = h0 (p).
Finalmente, la distribucion K : v 7! Kv es diferencible, ya que esta generada
por los campos de vectores diferenciables inducidos por los campos que gereran la
distribucion diferenciable H : p 7! Hp en L(M).
Concluimos que dada una conexion en L(M) por una distribucion H : p 7! Hp,
ella determina una unica conexion en T (M), dada por la distribucion K : v 7! Kv .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
172
5 Diferentes enfoques de conexiones lineales
Formas de conexion en L(M)
Existe una interpretacion de conexion en L(M) en terminos de formas diferenciales globales, que vamos a esbozar a continuacion.
Necesitamos primeramente establecer el siguiente resultado:
Si el brado de referencias lineales L(M) sobre una variedad M tiene una
conexion H , entonces es paralelizable; es decir, existen n + n2 campos de
vectores diferenciables sobre L(M) que forman en cada punto una base
de su espacio tangente.
Para denir tales campos de vectores empezaremos deniniendo n2 campos de
vectores verticales (para lo cual no se necesita conexion alguna sobre L(M)) de la
forma siguiente:
Denimos lo que vamos a llamar campos de vectores fundamentales sobre L(M),
a traves de la aplicacion
: gl(n; IR) ! X(L(M))
A 7! (A) = A :
Para denir el campo de vectores A , identicamos gl(n; IR) Te (GL(n; IR)), ya
que GL(n; IR) es una subvariedad abierta del conjunto de todas las matrices n n
con coecientes reales gl(n; IR).
Un elemento A 2 gl(n; IR) se interpreta como un campo de vectores en GL(n; IR),
cuyo representante en cada punto a 2 GL(n; IR) es (La ) (A), que es la imagen de
A 2 Te(GL(n; IR)) mediante la aplicacion inducida de La : GL(n; IR) ! GL(n; IR),
b 7! La(b) = ab (traslacion a la izquierda en el grupo GL(n; IR)).
Sea la curva integral de A en GL(n; IR) pasando por el elemento unidad e:
: IR ! GL(n; IR);
(t) = exp tA:
Esto permite denir en L(M) un grupo uniparametrico de transformaciones
: IR L(M ) ! L(M)
(t; p) 7! p exp tA:
Su correspondiente campo de vectores asociado va a ser, por denicion, (A) =
A y recibe el nombre de campo de vectores fundamental. Su representante en cada
punto p 2 L(M) es el vector tangente a la curva t 7! p exp tA en t = 0. Como estas
curvas, para cada p, quedan siempre en la bra 1(p), resulta que el campo A es
vertical.
La : gl(n; IR) ! X(L(M), as denida es un homomorsmo de algebra inyectivo.
En efecto:
Observemos que Ap = (p ) (Ae ) siendo p la aplicacion denida en la pagina 165
de este Tema, con lo que se tiene la linealidad de .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
173
Demostremos que conserva el corchete. Primeramente, demostremos que si A 2
gl(n; IR), (Ra ) Apa 1 = (a 1 Aa)p . Esto es as, pues basta observar que Ra pa 1 =
p ja 1 , siendo
Ra : L(M) ! L(M)
p : GL(n; IR) ! L(M)
ja : GL(n; IR) ! GL(n; IR)
p 7 ! pa
b 7 ! pb
b 7 ! aba 1
Tomando aplicaciones inducidas en el elemento neutro e 2 GL(n; IR)
(Ra) (Apa 1 ) = (Ra pa 1 ) (A) = (p ja 1 ) (A) = (a 1 Aa)p :
Si A; B 2 gl(n; IR) se tiene
(exp tA ) B B =
[A ; B ] = LA B = tlim
!0
t
(R(exp tA) 1 ) B B
(exp tA)B(exp tA) 1 B
= tlim
=
= tlim
!0
!0
t
t
(exp tA)B(exp tA) 1 B (jexp tA) B B = tlim
=
= tlim
!0
!0
t
t
(R(exp tA) 1 Lexp tA) B B (R(exp tA) 1 ) B B = tlim
= [A; B] :
= tlim
!0
!0
t
t
Finalmente, para probar la inyectividad, supongamos que Ap = 0, entonces la
curva t 7! p exp tA se reduce al punto p, es decir, p exp tA = p; 8t 2 IR, luego
exp tA = e; 8t 2 IR. Con lo que A = 0.
Si ahora tomamos la base canonica fEij gi;j=1;:::;n en gl(n; IR), donde cada Eij es
la matriz con coecientes nulos, excepto el que ocupa la entrada (i; j ), que vale 1.
Los correspondientes campos de vectores fundamentales (Eij ) forman un conjunto
de n2 campos de vectores independientes denidos globalmente en L(M).
Tratamos ahora de buscar los n campos de vectores que nos faltan. Ahora s
necesitamos utilizar la conexion H dada en L(M). Denimos la siguiente aplicacion
B : IRn ! X(L(M))
7! B()
siendo B()p = ped
(); es decir, el unico vector horizontal en Tp(L(M )) que se proyecta
sobre el vector pe() 2 T(p)(M), vector en x = (p) que tiene componentes respecto
n
X
a la referencia p (x; v1 ; : : : ; vn ): pe() = i vi .
i=1
Si 6= 0, entonces B()p 6= 0; 8p 2 L(M). Pues si B()p = 0, para algun p,
entonces pe() = B()p = 0; y como pe: IRn ! T(p)(M) es un isomorsmo lineal,
resulta = 0.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
174
5 Diferentes enfoques de conexiones lineales
Los campos de vectores horizontales fB1; : : : ; Bng correspondientes a la base
natural fe1; : : : ; eng de IRn , son pues linealmente independientes.
Concluimos entonces, dada una conexion H en L(M) y puesto que fBk gk=1;:::;n
son horizontales y los f(Eij ) gi;j=1;:::;n son verticales, que fBk ; (Eij ) gi;j;k=1;:::;n son
linealmente independientes en todo punto p 2 L(M).
Ya estamos en condiciones de poder dar una denicion de conexion en L(M)
en terminos de 1{formas diferenciables. Consideremos la base dual fk ; !ji g de
fBk ; (Eij ) g en el sentido que
k ((Eij ) ) = 0
k (Bi ) = ik
!`k (Bi ) = 0 !`k ((Eij ) ) = ik `j :
Si Z 2 X(L(M)), se descompone en forma unica, por la propiedad (1) de H
enn la suma de un campo vertical y otro horizontal, Z = vZ + hZ , entonces vZ =
X i
!j (Z )(Eij ) . As dada una conexion H en L(M) podemos denir la proyeccion
i;j =1
vertical de campos de vectores y por tanto conocer las !ji sobre cualquier campo de
vectores sobre L(M). A las 1{formas !ji se les denomina 1{formas de conexion, y se
tiene el siguiente resultado:
1') !`k ((Eij ) ) = ik `j : (!`k (A ) = Ak` ; 8A 2 gl(n; IR))
n
X
2') !ji ((Ra ) Z ) =
(a 1 )`j !`k (Z )aik 8Z 2 Tp(L(M)); 8a 2 GL(n; IR):
k;`=1
3') !ji son diferenciables:
Este resultado nos permite dar otra denicion de conexion en L(M), en la manera
siguiente:
Dar una conexion en el brado de las referencias lineales L(M ) consiste en n2
1{formas !ji , cumpliendo las tres propiedades 1'), 2') y 3') anteriores.
Para probar (2') es suciente vericarla para vectores verticales, es decir, de la
n
X
(a 1 )`j !`k (Ap )aik .
forma Ap = (A), A 2 gl(n; IR). Esto es, !ji (Ra) Apa 1 =
k;`=1
1
pa 1 = (a Aa)p (pagina 173), se sigue que
i 1 i
!j (Ra) (A 1 ) = !j (a Aa)p = (a 1 Aa)ij =
Como (Ra) A
pa
n
X
X 1` k i
=
(a 1 )`j Ak` aik =
(a )j !` (Ap )ak :
k;`=1
k;`=1
n
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
175
3') Las !ji son diferenciables. Como los campos de vectores verticales y horizontales generan el conjunto de todos los campos de vectores sobre L(M ) (pagina
172) solo basta ver que las !ji aplicadas a campos de verticales y horizontales dan
funciones diferenciables.
Para campos de vectores horizontales es claro, por ser !ji nulas sobre ellos, y
tambien para campos de vectores verticales, pues basta tomar campos de la forma
(A) = A .
Veamos ahora que si tenemos una conexion en L(M) denida por n2 1{formas
de conexion, vericando:
1') !`k (A ) = Ak` ; 8A 2 gl(n; IR):
n
X
i
2') !j ((Ra) Z ) =
(a 1 )`j !`k (Z )aik 8Z 2 Tp (L(M)); 8a 2 GL(n; IR):
k;`=1
i
3') !j son diferenciables:
podemos denir la conexion en L(M) en terminos de la distribucion H : p 7 ! Hp,
vericando:
1) Tp (L(M)) = Hp Vp
2) (Ra ) (Hp ) = Hpa
3) H : p 7 ! Hp es una distribucion diferenciable.
Para ello denimos
Hp = Zp 2 Tp(L(M)) !ji (Zp ) = 0; 8i; j 2 f1; : : : ; ng
1) Si Zp 2 Vp, entonces !ji (Zp) 6= 0, para algun i; j 2 f1; : : : ; ng, as pues
Zp 62 Hp,. Por consiguiente, Vp \ Hp = f0g.
Si Zp 2 Tp(L(M)) es un vector cualquiera, sea Aij = !ji (Zp). Entonces, si A =
(Aij ), se tiene !ji (Ap) = Aij . Por consiguiente, poniendo, Wp = Zp Ap, resulta
!ji (Wp) = !ji (Zp ) !ji (Ap ) = 0:
con lo que Zp = Ap + Wp con Ap 2 Vp y WP 2 Hp , concluimos que
Tp(L(M)) = Vp Hp:
2) Si Zp 2 Hp, resulta !ji ((Ra) (Zp )) =
decir que (Ra) (Zp ) 2 Hpa; as pues
n
X
(a 1 )`j !`k (Zp)aik = 0, lo que quiere
k;`=1
(Ra) Hp = Hpa:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
176
5 Diferentes enfoques de conexiones lineales
3) Para probar que H : p 7 ! Hp s diferenciable, sean Z1 ; : : : ; Zn+n2 campos de
vectores que generan Tp(L(M)) para todo q en un entorno de p, y fEij gi;j=1;:::;n base
de gl(n; IR), pongamos
Z i = Zi !ji (Zi )(Ej` ) :
Los campos de vectores Z i son claramente horizontales y generan la distribucion
H en un entorno de p.
Torsion y curvatura en L(M)
Vamos a introducir ahora los conceptos de torsion y curvatura en terminos de la
conexion en L(M).
Consideremos las 1{formas i sobre L(M), denidas en la pagina 174, denominadas formas canonicas sobre L(M), y que verican:
X
pe 1( Xp) = pi (Xp )ei ;
i=1
n
donde fe1; : : : ; eng es la base canonica en IRn.
Si tenemos una conexion H en L(M) y si !ji son sus 1{formas de conexion,
denimos las 1{formas de torsion i y de curvatura ij por
i(Xp ; Yp) = (di )(hXp ; hYp)
ij (Xp ; Yp) = (d!ji )(hXp ; hYp)
Se tiene entonces las ecuaciones de estructura:
n
X
i
d + !ki ^ k = i
k=1
n
X
i
d!j + !ki ^ !jk = ij
k=1
Para establecer estas ecuaciones, nos bastara demostrar que para dos campos de
vectores cualesquiera X e Y sobre L(M), se tiene
n
X
1
i
!ki (X )jk (Y )
d (X; Y ) + 2
k=1
n
X
1
i
d!j (X; Y ) + 2
!ki (X )!jk (Y )
k=1
!ki (Y )k (X ) = i(X; Y )
!ki (Y )!jk (X ) = ij (X; Y )
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
177
Como X(L(M)) esta localmente generado por los campos de vectores basicos y
fundamentales (pagina 172), es suciente vericar esta formulas para estos campos
particulares.
La primera ecuacion la vericaremos considerando los tres casos siguientes:
1. X = A ; Y = B . Entonces, como i es nula sobre campos de vectores
verticales
2di (A ; B ) = A (i (B )) B (i (A )) i ([A ; B ]) = i ([A; B] ) = 0;
los restantes sumandos del primer miembro son igualmente nulos. Y en lo que
respecta al segundo miembro, tenemos
i(A ; B ) = di (hA ; hB ) = di (0; 0) = 0:
2. X = A ; Y = B(). Necesitamos establecer primero que [A ; B()] = B(A),
en efecto
(RexptA) 1 ) B() B()
=
[A ; B()] = LA B() = tlim
!0
t
(exptA) B
((
exptA
)
)
B
(
)
= tlim
= B(A):
= B tlim
!0
!0
t
t
Utilizando este hecho, los diferenteres sumando de la formula quedan
2di (A ; B()) = A i (B()) B()i (A ) i ([A ; B()]) =
= A (i ) B()(0)
i (B(A)) = (A)i =
n
X
Aik k
k=1
n
n
X
X
!ki (A )k (B()) !ki (B())k (A ) = Aik k
k=1
k=1
i(A ; B()) = di (hA ; hB()) = di (0; B()) = 0
3. Finalmente, en caso de que X = B(); Y = B(), como las !ji son nulas
sobre campos horizontales, del primer miembro solo queda di (B(); B()), pero
di (B(); B()) = di (hB(); hB()) = i(B(); B()):
Para la segunda formula y analogamente a la demostracion de la primera, es
suciente considerar los tres casos siguientes:
1. Xp; Yp 2 Hp . En este caso la forma es inmediata pues !ji (Xp) = !ji (Yp ) = 0,
y hXp = Xp ; hYp = Yp.
2. Xp; Yp 2 Vp. Existen A; B 2 gl(n; IR) tales que Ap = Xp ; Bp = Yp, y se tiene
2d!ji (Ap ; Bp ) = Ap!ji (B ) Bp !ji (A ) !ji ([A ; B ]p) = !ji ([A; B]p )
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
178
5 Diferentes enfoques de conexiones lineales
n
X
k=1
n
X
i
k
!k (Bp )!j (Ap ) =
Aik Bjk Bki Akj =
k=1
= (AB BA)ij = [A; B]ij = !ji ([A; B]p)
ij (X; Y ) = ij (Ap ; Bp ) = d!ji (hAp; hBp ) = 0:
!ki (Ap )!jk (Bp )
3. Xp 2 Vp; Yp 2 Hp. Sea Y un campo de vectores horizontal prolongacion de
Yp y 2 IRn tal que B()p = Yp. Por otro lado existe A 2 gl(n; IR) tal que Ap = Xp .
As:
2d!ji (Xp; Yp ) = Ap !ji (Y ) Yp!ji (A ) !ji ([A ; Y ]p) = !ji (B(A)p ) = 0;
los restantes sumandos del primer termino son todos nulos. Y en cuanto al segundo
termino, tenemos:
ij (Xp ; Yp) = d!ji (hXp; hYp) = d!ji (0; Yp ) = 0:
Queda as probada la 2a ecuacion de estructura.
Vamos ahora a relacionar las formas de torsion i y las formas de curvatura
i
j con los tensores torsion y curvatura relativos al conexion de Koszul r en M
determinada por las formas de conexion !ji sobre L(M).
Denimos en M el campo de tensores torsion (o simplemente torsion) T y el
campo de tensores curvatura (o simplemente curvatura) R, poniendo:
T (Xx ; Yx) = 2
n
X
i=1
i(X p; Y p)ui
R(Xx ; Yx)Zx = 2pe ij (X p; Y p) pe 1 (Zx)
donde Xx; Yx ; Zx 2 Tx(M), p = (x; u1 ; : : : ; un) referencia en x, X p; Y p 2 Tp(L(M))
tales que (X p) = Xx; (Y p) = Yx, y la matriz ij (X p; Y p) 2 gl(n; IR) actua sobre
pe 1 (Zx) 2 IRn de la manera usual.
Estas deniciones no depende de la eleccion de p, X p e Y p. En efecto,
Si reemplazamos X p por X p, tal que (X p) = Xx, entonces X p X p es vertical,
as
i(X p X p; Y p) = di (h(X p X p); hY p) = di (0; hY p) = 0;
similarmente, Yp puede ser reemplazado por Y p con (Y p) = Yx, sin que cambie el
valor de T (Xx ; Yx).
Si cambiamos p por q = pa (a 2 GL(n; IR)), podemos elegir (Ra ) (X p) y
(Ra) (Y p) como nuevos vectores en Tq (L(M)) que se proyectan en Xx e Yx, respectivamente, y tenemos
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
179
n
X
i
(Ra) X p; (Ra) Y p qe(ei ) = di h(Ra) X p; h(Ra) Y p pfa(ei ) =
i=1
i=1
n
X
=
n
X
i=1
0n
X
Ra(di ) (hX p; hY p)pe(a 1 ei ) = d(Rai )(hX p; hY p)pe @ (a
i=1
j =1
1
0
!
n
n
n
X
X
X
i
k
@
= d
ak (hX p; hY p)pe
(a 1 )ji ej A =
n
X
i=1
=
n
X
k=1
n
X
i;j;k=1
1
1 )j ej A =
i
j =1
aik (dk )(hX p; hY p)(a 1 )ji pe(ej ) =
n
X
j
k
=
k (d )(hX p; hY p)pe(ej ) = (dj )(hX p; hY p)pe(ej ) =
j =1
j;k=1
n
X
= (j )(X p; Y p)pe(ej ):
j =1
n
X
i
A lo largo de estas igualdades hemos hecho la sustitucion Ra = aij j . Esto
j =1
es as pues de
(Wp) =
n
X
i=1
i (Wp)pe(ei )
((Ra) Wp) =
resulta, al ser ((Ra) Wp) = (Wp ), que
n
X
i=1
i ((Ra ) Wp) f
pa(ei );
n
X
es decir
de donde
n
X
i
(Wp)pe(ei ) = i ((Ra) Wp) pe(a 1 ei );
i=1
i=1
n
X
j
(Wp )ej = i ((Ra) Wp) (a 1 )ji ej ;
i=1
j =1
n
X
X
(R i )(Zp ) = ai j (Zp):
a
n
j =1
j
Similarmente, para la curvatura vemos que la denicion no depende de la eleccion
de X p e Y p. Ademas si cambiamos p por q = pa, resulta:
pa 1(Z ) =
qe ij ((Ra ) X p; (Ra ) Y p) qe 1 (Zx) = pfa a 1
ij (X p; Y p)a f
x
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
180
5 Diferentes enfoques de conexiones lineales
= pe ij (X p; Y p) pe 1 (Zx) :
Veamos que estos tensores T y R denidos aqu coinciden con los denidos ya
para una conexion r en M. Es decir, se tiene, para X; Y; Z 2 X(M):
T (X; Y ) = rX Y rY X [X; Y ]
(5.19)
R(X; Y )Z = rX rY Z rY rX Z r[X; Y ]Z
(5.20)
Para la demostracion de estas relaciones tenemos que establecer previamente el
siguiente resultado:
n
ib
X
b
rX Y (x) = Xp (Y ) ui
i=1
(5.21)
b Yb son levantamientos horizontales a L(M), i las 1{formas
donde X; Y 2 X(M), X;
canonicas en L(M) y p = (x; u1 ; : : : ; un) una referencia en x.
Para establecer esta formula, sea una curva en M con (0) = x y 0 (0) = Xx ,
y sea b el levantamiento horizontal de a L(M) con b(0) = p y tal que b0 (0) = Xbp .
Recordando la denicion del transporte paralelo, escogiendo 2 IRn tal que
bg
(t)() = Y(t)
tenemos
Luego tenemos
1
bg
(t) (Y(t)) = t 1(Y(t)) = bg
(0)() = pe():
Consecuentemente,
o
(t)
pe bg
1
Y(t) = pe() = t 1 Y(t) :
1 1 (Y ) Y =
rX Y (x) = tlim
x
!0 t t (t)
1
1
g
Y(t) (pe pe )(Yx ) =
eb
1 1
1
g
= pe tlim
!0 t b(t) Y(t) pe (Yx ) =
!
n
n
X
X
1
i (Ybp)ei =
i (Yb(t))ei
= pe tlim
!0 t
1
= tlim
!0 t
p (t)
i=1
i=1
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
181
n X
n
ib
ib
X
1
i
b
b
lim
=
(
Y
)(
b
(
t
))
(
Y
)(
p
)
u
=
(Y ) ui:
X
i
p
i=1 t!0 t
i=1
Con lo que queda demostrada la formula (5.21)
Para el tensor torsion tenemos entonces:
T (Xx; Yx) = 2
n X
b
i=1
Xp i (Yb )
n
X
i=1
i(Ybp; Ybp)ui =
b Yb ]p ui = rX Y (x) rY X (x) [X; Y ](x)
bYp i (Xb ) i [X;
b Yb ]p) = [X; Y ]x.
ya que (X;
Para probar la segunda igualdad (5.20), relativa al tensor curvatura, la 2a ecuacion de estructura da
b Yb ]p)= !ji ([X;
b Yb ]p):
2
ij (Xbp; Ybp )=2d!ji (Xbp; Ybp)= Xbp !ji (Yb ) Ybp !ji (Xb ) !ji ([X;
b Yb ] igual a
Si ponemos la componente vertical de [X;
b Yb ]p = Ap
v[X;
entonces obtenemos
as, resulta por una parte que
A 2 gl(n; IR);
2
ij (Xbp; Ybp) = Aij
R(Xp ; Yp)Zp = pe 2!ji (Xbp ; Ybp)(pe 1 Zx) = pe Aij j (Zbp)ei = Aij j (Zbp )ui:
Por otro lado utilizando las tres relaciones siguientes
rYx Z =
n
X
Ybp i (Zb) ui
i=1
n
X
u
\
Z
Xbp i r
i
X
i=1
0n
1 n
X
i @ Ybp j (Zb)ubj A = X Ybp j (Zb) i (ubj ) = Ybp i (Zb) i ;
\
pi r
Z
=
p
j
p
X
rXx rX Y =
j =1
se tiene
j =1
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
182
5 Diferentes enfoques de conexiones lineales
rXx rY Z rYx rX Z r[X; Y ]x Z =
=
=
=
=
=
=
n X
i
i
i
b Yb ]p (Zb) ui =
h[X;
Ybp Xb (Zb)
Xbp Yb (Zb)
i=1
n X
i
i
b
b
b
b
b
b
[X; Y ]p (Z ) h[X; Y ]p (Z ) ui =
i=1
n
n
X
b b i b X i b
v[X; Y ]p (Z ) ui =
Ap ( Z u i =
i=1
1
i
i
lim
(Zb)(p exp tA) (Zb)(p) ui =
t
!
0
t
i=1
!
n
i
X
1
i
lim
pe
p exp tA (Zbp) p(Zb) ei =
t
!
0
t
1
0i=1n
n
X
X
Aji pi (Zb)A uj :
Aji pi (Zbp )ej =
pe @
i=1
n X
i;j =1
i;j =1
Formas de conexion en L(M) denidas por
k
ij
Veamos nalmente como dadas las componentes de una conexion lineal kij denen una conexion en el brado L(M) de referencias lineales sobre M.
Para es n consideremos las coordenadas locales en L(M) inducidas por las coordenadas locales en M. Sea (U; (x1 ; : : : ; xn )) un sistema coordenado en M. Todo elemento p = (x; u1 ; : : : ; un) 2 L(M), que es una referencioa en x = (p), puede
expresarse por
!
n
X
n
X
@
k
p = x; xe1 (p) @xk ; : : : ; xekn(p) @x@ k :
jx
jx
i=1
i=1
Si kij son los coecientes de la conexion en U , denimos las 1{formas de conexion
!ji en 1 (U ) L(M) por
!ji =
n
X
k=1
0
n
X
yeki @dxekj +
(
h;`=1
1
k )xe` dxeh A
h`
j
(5.22)
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
5.4 Enfoque por brados
183
donde, en cada p, la matriz no singular (xeij (p)) tiene matriz inversa, que denotamos
por (yeji (p)) = (xeij (p)) 1 .
Cada una de las !ji es una 1{forma sobre L(M) determinada independientemente
de la eleccion de coordenadas, las cuales denen una conexion en L(M).
Resumen de conexiones lineales
Hemos denido una conexion lineal en una variedad M de varias formas equivalentes, que resumimos a continuacion:
1
Denicion axiomatica (Koszul). Mediante un operador
r : X(M) X(M) ! X(M), (X; Y ) 7! rX Y , vericando
A1: rX + Y Z = rX Z + rY Z
A3: rfX Y = f rX Y
A2: rX (Y + Z ) = rX Y + rX Z
A4: rX fY = (Xf )Y + f rX Y
donde f; g 2 F(M) (funciones diferenciables).
2 Denicion clasica. Dando los coecientes kij en cada entorno coordenado
(U; (x1 ; : : : ; xn )) en M.
Los cuales estan sujetos a la ley de transformacion (5.5), en la interseccion con
otro entorno coordenado (U; (x1; : : : ; xn)):
=
n
2 k
i j k @x @x @x + X @ x @x :
ij k
k
k=1 @x @x @x
i;j;k=1 @x @x @x
n
X
En vez de los coecientes kij , podemos dar las conexion por 1{formas ji denidas
en cada entorno coordenado U , por
@
i
j @xk = ikj ;
enfoque conocido como de Cartan (ver pag. 147).
3 Denicion por transporte paralelo. Dando un isomorsmo xy entre los
espacios tangentes en Tx(M) y Ty (M) que depende solo de los puntos x e y y de la
curva que les une vericando:
1. xy = zy xz , para z un punto en entre x e y.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
184
5 Diferentes enfoques de conexiones lineales
2. yx = xy1.
Vericando ademas que, si !t = A_ t At 1 , donde At es la matriz asociada a
t : Tx(M) ! Ty (M) respecto a base jadas, !t (x; x_ ) es lineal en x_ .
4 Denicion mediante una distribucion horizontal en T (M). Dando en cada
v del brado tangente T (M) un subespacio Hv complementario del tangente a las
bras, vericandose
1) Tv (T (M)) = Hv Vv
2) (Hv ) = Hv 8 2 IR f0g
3) H : v !
7 Hv es diferenciable:
5 Denicion mediante una distribucion horizontal en L(M). Dando en cada
p del brado de las referencias lineales L(M) un subespacio Hp complementario del
tangente a las bras, vericandose:
1) Tp(L(M)) = Hp Vp
2) (Ra) (Hp ) = Hpa
3) H : p 7 ! Hp es una distribucion diferenciable.
6 Denicion mediante formas de conexion en L(M). Mediante un conjunto
de 1{formas !ji denidas globalmente en el brado de las referencias lineales L(M),
vericando:
1') !`k (A ) = Ak` ; 8A 2 gl(n; IR):
n
X
2') !ji ((Ra ) Z ) =
(a 1 )`j !`k (Z )aik 8Z 2 Tp(L(M)); 8a 2 GL(n; IR):
k;`=1
3') !ji son diferenciables:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
CONEXIONES
3
t(v0 ) = vt
n
X
k x_ i v i = 0
k
v_ t +
ij t t
Transporte paralelo
1
i;j =1
Enfoque axioma
rX + Y Z = r
rX (Y + Z ) =
rfX Y =
rX fY = (Xf
(Seccion 5.3, (5.12), (5.14))
t : Tx(M) ! Txt (M) isomorsmo
xz = yz xy yx = xy1
1 1 Y (t) Y (0)
rX Y (x) = tlim
6
!0 t t
x_ 0 = Xx (pag. 158)
xt curva en M
pt = xbt levant. a L(M)
t(v) = pet (); = pe0(v)
(pag. 167)
5
n
X
rX Y (x) = Xbp i (Yb ))ui
Hv = Y (Tx (M))
Y (x) = v
ruY = 0 8u 2 Tx(M
(pag. 160)
i=1
i formas canonicas en L(M)
b Yb levant. de X; Y
X;
p = (x; u1 ; : : : ; un)
(pag. 180)
Hp = s (Tx(M))
4
Distribucion
s(x) = p
rus = 0 8u 2 Tx(M)
H : v ! Hv *
(pag. 166) T (T (M
Distribucion horizontal en L(M)
H : p ! Hp Tp(L(M)) diferenciable
Tp(L(M)) = Hp Vp
(Ra) (Hp) = Hpa
H
v = h0 (Hp )
h0 : L(M) L(M)
p h0 (p) = p(0)
7!
!
(pag. 170)
e
v
(Hv ) = H
vZ =
n
X
i;j =1
!ji (Z
Hp = Zp 2 Tp(L(
(pag.
186
5 Diferentes enfoques de conexiones lineales
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
EJERCICIOS
1. Sea el conjunto M = f(x; y) 2 IR2 x2 + y2 = 1g [ f(0; y) 2 IR2 1 < y < 2g.
La funcion ' : M ! IR, denida por
(0; s) 7! 1 s 1 < s < 2
(sen 2s; cos 2s) 7! s
0s<1
es una carta que determina una estructura diferenciable en M.
2. Demostrar que si A0 es un atlas diferenciable sobre M, entonces es diferenciable
el atlas A que contiene justamente aquellas cartas cuyo cambio de cartas con
cada carta de A0 es diferenciable.
3. Sobre la circunferencia unidad S1 = f(x; y) 2 IR2 x2 + y2 = 1g, se considera la
estructura diferenciable dada por las dos cartas cuyos homeomorsmos coordenados son las proyecciones estereogracas desde los puntos (0; 1) y (0; 1)
sobre el eje OX . Demostrar que esta estructura diferenciable coincide con la
dada en el Ejemplo 1.16, para n = 1.
4. (a) Se considera en el conjunto M = IR [ fpg la topologa tal que IR M sea
un abierto y los entornos de p sean los conjuntos (U f0g) [ fpg, donde
U es un entorno de 0 2 IR. Demostrar que M es localmente eucldeo pero
no Hausdor.
(b) En el conjunto E = E0 [ E1 IR2, donde
E0 = f(x; 0) 2 IR2 x 2 IRg y E1 = f(x; 1) 2 IR2 x 2 IRg;
denimos una relacion de equivalencia por
8 (x; 0) (y; 0) () x = y
<
x=y
: ((x;x; 1)0) ((y;y; 1)1) ()
() x = y < 0:
Demostrar que conjunto cociente M = E= no es separado y, sin embargo,
sobre M se puede denir una estructura diferenciable, tomando las dos
cartas siguientes:
187
188
Ejercicios
U1 = f[(x; 0)] x 2 IRg; '1([(x; 0)]) = x
U2 = f[(x; 0)] x < 0g [ f[(y; 1)] y 0g; '2([(x; 0)]) = x; '2([(y; 1)]) = y:
5. Demostrar la armacion 3 de la pagina 9; es decir,\una variedad diferenciable
es conexa si y solo si es conexa por arcos".
6. Demuestrese que toda variedad diferenciable posee un atlas diferenciable numerable.
7. Probar que si M es una variedad diferenciable y A es un conjunto numerable
cualquiera, entoces M A puede ser dotado de una estructura de variedad
diferenciable.
8. Probar que sobre la circunferencia S1 = IR=ZZ , conjunto cociente de IR modulo
un numero entero, se dene una estructura diferenciable por el atlas cuyas cartas estan denidas por los abiertos U que son imagenes mediante la proyeccion,
de intervalos abiertos en IR de longitud 1=2, que no contienen a las clases denidas por los puntos x = 1=4 y 3=4 y por los abiertos V imagenes mediante la
proyeccion de intervalos abiertos de longitud 1=2 que no contienen a las clases
denidas por x = 0 y 1=2 y cuyas funciones coordenadas
u : [x] 7! sen 2x;
v : [x] 7! cos 2x;
denidas, respectivamente, en U y V .
9. Sea F1 y F2 dos atlas diferenciables sobre un espacio topologico M. Probar que
F1 y F2 son equivalentes si y solo si denen el mismo conjunto de funciones
diferenciables.
10. Sea (x1 ; : : : ; xn) un sistema de coordenadas locales denidas en un entorno de
un punto x de una variedad diferenciable M y sea (y1 ; : : : ; ym ) funciones diferenciables en un entorno de x. Demostrar que para que (y1 ; : : : ; ym ) constituyan un sistema de coordenadas locales
de x, es necesario y suciente
@yialrededor
que m = n y que el Jacobiano de @xj sea no nulo.
x
11. Sea IR la variedad de los numeros reales con la estructura usual ' : IR ! IR,
t 7! '(t) = t y en el abierto ] 1; 1[ consideramos la estructura inducida.
Entonces son difeomorsmos las aplicaciones:
f : ] 1; 1[ ! IR
t 7! f (t) = 1 t t2
g : ] 1; 1[ ! IR
t 7! g(t) = tag 2 t
12. Demostrar que es un difeomorsmo la aplicacion F : IR2 ! IR2 denida por
F (x; y) = (xey + y; xey y);
8(x; y) 2 IR2:
13. Sea la aplicacion F : S2 ! P2(IR) tal que F (x) es la clase determinada por
x 2 S2 en P2(IR). Demostrar que F es difeomorsmo local.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Ejercicios
189
14. Sea M una variedad diferenciable y F : N ! M un homeomorsmo. Demuestrese que N posee una unica estructura de variedad diferenciable tal que F sea
un difeomorsmo.
15. Sean
F : IR2 ! IR2
G : IR2 ! IR3
(x; y) 7! (x2 2y; 4x3y2 )
(x; y) 7! (x2 y + y2 ; x 2y3; yex )
@
@
Calcular 1) F j(1;2) y G j(x;y) 2) G j(0;1)(4 @x
@y ).
16. Sea vp vector tangente a IR3 ( vp 2 Tp(IR3 )) para el que v = (2; 1; 3) y
p = (2; 0; 1). Calcular la derivada direccional vp (f ), donde f : IR3 ! IR, en
los siguientes casos:
a) f (x; y; z) = y2 z
b) f (x; y; z) = x7
c) f (x; y; z) = ex cos y
17. Si M = f 1 (f0g) es la hipersupercie denida por f : IRn+1 ! IR, entonces
Tx (M) es isomorfo a
n
.
i (Tx (M)) = v 2 Tx(IRn+1) (grad f )x v = 0
o
donde i : M ,! IRn+1 es la inclusion.
18. Si f y g son funciones reales diferenciables denidas en una variedad M. Probar
que para todo x 2 M, se tiene
d(f + g)x = dfx + dgx
d(fg)x = f (x)dgx + g(x)dfx:
19. Sea f una funcion diferenciable en un abierto A de una variedad diferenciable
M de dimension n, y sea p 2 A. Supongamos que (df )p 6= 0. Demostrar que
existe un sistema de coordenadas locales (y1 ; : : : ; yn ) alrededor de p tal que
yi(p) = 0 (i = 1; 2; : : : ; n)
y
f = f (p) + y1:
20. Sean f 1 ; : : : ; f n funciones diferenciables denidas en un abierto A de una variedad diferenciable M de dimension n y p 2 A. Demostrar que el conjunto de
formas f(df 1 )p ; : : : ; (df n )p g Tp (M) es linealmente independiente si y solo si
(f 1 ; : : : ; f n ) es un sistema de coordenadas locales alrededor del punto p.
21. Sea F : M ! N una submersion entre variedades diferenciables, probar que:
a) Un vector v 2 Tx(M) es tangente a la bra F 1 (F (x)) si y solo si F (v) = 0.
b) Una aplicacion G : N ! P es diferenciable si y solo si G F es diferenciable.
22. Demostrar que no es una inmersion la aplicacion
F : IR ! IR2 ;
t 7! F (t) = (t2 ; t3):
23. Demostrar que la aplicacion F : IR ! IR2 dada por t 7! (t2 1; t3 t) no es
inyectiva pero dene una inmersion de IR en IR2 .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
190
Ejercicios
24. Sobre el subconjunto M = (IR f0g) [ (IR f1g) de IR2 se da la estructura
diferenciable denida por las dos cartas
'0 : IR f0g ! IR
'1 : IR f1g ! IR
(s; 0) 7! s
(s; 1) 7! s
y se denen las aplicaciones
f : M ! IR
F (s) = (s; F1): IRsi! Ms 2 IR f0g
f (s; 0) = f (s; 1) = s; s 2 IR
F (0) = (0; 0)
25.
26.
27.
28.
29.
Demostrar que f es una inmersion y que f F es diferenciable, pero F no es
diferenciable.
Si F : M ! N es una inmersion y G : M ! P es una aplicacion diferenciable,
demostrar que H : M ! N P, denida por H (x) = F (x); G(x) ; x 2 M, es
una inmersion.
Demostrar que la composicion de inmersiones es una inmersion.
Consideremos las proyeciones canonicas en la variedad producto M N, 1 :
M N ! M y 2 : M N ! N y una variedad P. Demostrar que : P ! M N
es diferenciable si y solo si 1 y 2 son diferenciables.
Sea F : IRn+1 f0g ! Sn, denida por F (x) = kxxk . Probar que tiene rango n.
Consideremos la aplicacion F : IR3 ! IR3 dada por la transformacion ortogonal
0 q1 q1
B q21 q 21
A=B
@
0
2
0
2
1
0C
0C
A
1
la cual induce una aplicacion (denotada por la misma letra) F : S2 ! S2 .
Demostar que esta es diferenciable.
30. Se considera la aplicacion F : IR3 ! IR3 dada por (x1 ; x2 ; x3 ) 7! (x1 x2 ; x2 ; x3 ).
Encontrar el rango de la restriccion FjS2 de F a S2 en cada punto de S2.
31. Sea la aplicacion
F : IR3 ! IR3
(x; y; z) 7 ! (x cos z y sen z; x sen z + y cos z; z)
Demostrar que FjS2 tiene valores en S2 y que la aplicacion inducida de S2 sobre
s mismo es un difeomorsmo.
32. Sea F : IR2 ! IR3 denida por (x; y) 7! (x2 ; xy; y). Encontrar el rango de F
en cada punto
p 2 IR2 .
.
o
n
33. En Sn = x = (x1 ; : : : ; xn+1 ) 2 IRn+1 (x1 )2 + + (xn+1)2 = 1 consideramos la estructura diferenciable denida por un atlas constituido por 2(n + 1)
cartas (Ui ; 'i) ( = 1; : : : ; n + 1):
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Ejercicios
191
n
U = x 2 Sn
n
.
o
x > 0
.
o
U+n+1 = x 2 Sn x < 0
'(x) = (x1 ; : : : ; xc ; : : : ; xn+1)
'+n+1(x) = (x1 ; : : : ; xc ; : : : ; xn+1 )
9
=
;
donde b indica que esa componente se suprime.
Probar, usando este atlas en Sn y el atlas identidad en IRn+1, que la inclusion natural i : Sn ,! IRn+1 es de rango n en todo punto de Sn (i.e.,
8x 2 Sn; dim i (x)(Tx (Sn )) = n).
34. Sea M una subvariedad de dimension m de IRn, (y1 ; : : : ; ym ) un sistema de
coordenadas locales de M alrededor del punto p y (x1 ; : : : ; xn ) el sistema de
coordenadas estandar en IRn. Se considera la composicion hk = xk i donde
i : M ,! IRn es la inclusion natural. Demostrar que la ecuacion del espacio
tangente de M en p viene dado por las ecuaciones:
m @hk
X
k
k
x = x (p) + i @yi (p);
i=1
(k = 1; 2; : : : ; n; i 2 IR)
35. Consideremos en el conjunto de puntos M de la curva plana de ecuacion
parametrica x = t2 ; y = t3 , la estructura diferenciable para la cual
' : M ! IR; (t2 ; t3) 7! t
es una carta, y en IR la estructura diferenciable canonica. Demostrar que la
inclucion i : M ,! IR2 es diferenciable, pero (M; i) no es una subvariedad de
IR.
36. Consideremos la variedad producto M N de dos variedades diferenciables
M y N. Demostrar que para todo punto (p; q) 2 M N el espacio tangente
T(p;q)(M N) se identica con Tp (M) Tq (N).
37. Sea una aplicacion diferenciable de la variedad producto M N en otra
variedad P. Establecer que la aplicacion lineal en (p; q) 2 M N se puede
expresar como sigue:
Si w 2 T(p;q)(M N) corresponde a (u; v) 2 Tp(M) Tq (N) (Ejercicio 36),
entonces
(w) = @1(u) + @2 (v)
donde @1 y @2 son, respectivamente, las aplicaciones inducidas por
1 : M ! P
2 : N ! P
1 (x) = (x; q); 8x 2 M
2(y) = (p; y); 8y 2 N
38. El grafo F de una aplicacion diferenciable F : M ! N entre variedades es el
conjunto
n
.
o
=
(
x;
y
)
2
M
N
y
=
F
(
x
)
F
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
192
Ejercicios
Demostrar que F es una variedad diferenciable y que el espacio tangente
T(x;y)( F ) Tx(M) Ty (N) es el grafo de la aplicacion lineal F (x):
n
.
o
T(x;y)( F ) = (v; w) 2 Tx(M) Ty (N) w = F (v)
39. Sea M = S2 f(0; 0; 1); (0; 0; 1)g y N = (x; y; z) 2 IR3 x2 + y2 = 1 (la
esfera sin los dos polos y el cilindro circular recto, respectivamente). Consideremos la aplicacion F : M ! N que asigna a un punto p 2 M el punto F (p) 2 N
donde intersecta la recta que pasa por p y corta al eje OZ ortogonalmente.
Demostrar que F es diferenciable.
40. Supongamos que la funcion f : M ! IR tiene rango 1 en todo punto de f 1 (a)
(a 2 f (M)). Demostrar que un vector v 2 Tx (M) es tangente a la subvariedad
f 1 (a) en el punto x 2 f 1 (a) si y solo si v(f ) = 0.
41. El conjunto S (n; IR) de las matrices reales simetricas de orden n, es una subvariedad inmersa en gl(n; IR) de dimension n(n + 1)=2.
Demostrar que el conjunto M de todas las matrices reales simetricas de orden
2 con valores propios distintos es un subconjunto abierto de S (2; IR)
42. S (n; IR) la subvariedad de gl(n; IR) formada por las matrices reales simetricas
de orden n (Ejercicio 41). S +(n; IR) el conjunto de las matrices simetricas
tal que la forma cuadratica asociada sea denida positiva. Establecer que
S +(n; IR) es un abierto en S (n; IR) y que la aplicacion A 7 ! A2 es un difeomorsmo de S +(n; IR) en s mismo.
43. El grupo ortogonal O(n) = X 2 GL(n; IR) t X = X 1 es una subvariedad
2
de dimension n(n 1)=2 de IRn .
44. Demostrar que las aplicaciones f; g : IR3 ! IR denidas por
f (x; y; z) = x2 + y2 + z2 1
g(x; y; z) = x + y z 1
determinan estructuras de variedad diferenciable sobre f 1 (0) y g 1(0), respectivamente.
Demostrar que la aplicacion F = (f; g) : IR3 ! IR2 determina una estructura
diferenciable sobre F 1(0; 0).
45. Demostrar que la aplicacion F : IR3 ! IR2 denida por
F (x; y; z) = (x2 y2 + 2xz 2yz 1; 2x + y z)
determina sobre F 1(0; 0) una estructura
de variedad diferenciable.
n
+1
n
x + an 1xn 1 + + a1 x + a0 = 0 .
46. Sea M = (x; an 1 ; : : : ; a1 ; a0 ) 2 IR
Demostrar que M es una subvariedad de IRn+1 difeomorfa a IRn.
47. Demostrar que los vectores unitarios tangentes a la esfera S2 es una variedad
diferenciable de dimension 3. (ver Ejemplo 1.85)
48. Demostrar que la ecuacion (x2 + y2 + z2 + 3)2 16(x2 + y2 ) = 0 dene una
variedad diferenciable de dimension 2.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Ejercicios
193
49. Dada f : IR2 ! IR denida por f (x; y) = y4 y2 +(1=4)x2 , >nos permite denir
1 (a)?.
una estructura difenciable
sobre
el
conjunto
f
50. Demostrar que M = (x; y; z) 2 IR3 x3 + y3 + z3 2xyz = 1 puede ser dotado de estructura de variedad diferenciable de dimension 2.
51. Sea A una matriz de orden
n sim
etrica y b 2 IR f0g; entonces la supercie
n
t
de segundo orden M = x 2 IR xAx = b es una subvariedad de dimension
n 1 de IRn.
52. Probar que el subconjunto
M = (x; y; z) 2 IR3 x2 y2 + 2xz 2yz = 1; 2x y + z = 0
de IR3 , admite una estructura de variedad diferenciable de dimension 1.
53. Sea f : IR2 ! IR; f (x; y) = x3 + xy + y3 + 1. >Para que puntos p = (0; 0),
p = (1=3; 1=3), p = ( 1=3; 1=3) permite f dar una estructura de variedad
diferenciable sobre f 1 (f (p))?
54. Consideremos la aplicacion bilineal : IRn IRm ! Mn;m(IR), denida por
0 11
( 1 ; : : : ; n ); ( 1 ; : : : ; m ) 7 ! @ n 1
1
A
n m
1 m
Probar que el par (Mn;m (IR); ) es el producto tensorial de IRn y IRm .
55. Si E es un espacio vectorial
real n{dimensional, demostar que la aplicacion
L
bilineal : IRn E ! n E denida por
(1 ; : : : ; n ); v 7 ! (1 ; : : : ; n ) v = (1 v; : : : ; nv)
es un producto tensorial.
56. Supongamos que u 2 E y v 2 F , elementos de los espacios vectoriales reales
tales que u v 6= 0, probar que
u v = u0 v0 si y solo si u0 = u; v0 = 1v ( 2 IR f0g)
57. Sean los espacios vectoriales sobre IR: IR2; IR3; (IR2 ) ; y L(IR2; IR3). Se verica:
IR3 (IR2) ' L(IR2; IR3 )
(Con lo que podemos identicar los elementos del producto tensorial IR3 (IR2 ) con las matrices reales de orden 2 3).
58. Sean aij y bij las componentes de dos tensores covariantes. Si aij xi xj =
bji xi xj , para valores arbitrarios de xk , probar:
1) aij + aji = bij + bji .
2) Si ademas los tensores dados son simetricos, entonces aij = bij .
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
194
Ejercicios
59. Sean aij las componentes de un tensor contravariante simetrico y bij las componentes de un tensor covariante antisimetrico, ambos sobre un espacio vectorial
de real de dimension dos. Calcular aij bij .
60. Si aij y bij son las componentes de dos tensores covariantes simetricos, tales
que
aij bk` ai`bjk + ajk bi` ak` bij = 0;
probar que aij = bij , para 2 IR.
61. Si aij son las componentes de un tensor antisimetrico y i son las componentes
de un vector, probar entonces que aij ij = 0; recprocamente, si aij i j = 0
para cualquier vector de componentes i , establecer que aij son las componentes de un tensor antisimetrico.
62. Si aij i j es un escalar invariante para i componentes de un vector arbitrario,
demostrar que aij + aji son las componentes de un tensor; si aij es simetrico
en sus ndices, entonces aij son las componentes de un tensor de tipo (0,2).
63. Si akij i j k es un escalar invariante para arbitrarios valores de i , i y i ,
demostrar que akij son las componentes de un tensor de tipo (1,2).
64. Sea T = 1 2 32 1 + 2 2 , siendo f1 ; 2 g la base dual de la base
fe1; e2 g de un espacio vectorial E . Hallar la expresion de T en la base dual de
la base fe1 + e2 ; 2e1 + 3e2 g.
65. Si T es unX
tensor de tipo (2,2) sobre un espacio vectorial E , demostrar que el
escalar
Tjiij es independiente de la base elegida para determinarlo.
1i;j n
66. Si A es un tensor de tipo (1,1) sobre un espacio vectorial E y se satiface
Aik Akj = ji ;
demostrar que det (Aij ) = kAij k = 1 o kAij k = 1, en este caso kAij + ji k = 0.
Si la dimension de E es impar y kAij k = 1, entonces kAij ji k = 0.
67. Si A es un tensor covariante simetrico de orden 2 y v un vector. Probar que
A = 0 o v = 0 si se verica:
Aij vk + Ajk vi + Aki vj = 0
68. Para que un conjunto de n(r+1)+(s+2) numeros
Kji11jirs+1
+2
N
correspondiente a cada base de rs+1
+2 E sean las componentes de un tensor de
tipo (r +1; s +2), es condicion necesaria y suciente que para 1; : : : ; r 2 E ,
v1; : : : vs 2 E arbitrarios, los numeros
j1
js 1
r
Kji11jirsijrs+1
+1 js+2 v1 vs i1 ir
sean las componentes de un tensor de tipo (1; 2).
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Ejercicios
195
69. Sea v un vector en IR2. Se asocia a cada base de IR2 los numeros v1 = v2
y v2 = v1, siendo (v1; v2 ) las componentes de v respecto a dicha base. >Son
(v1 ; v2 ) las componentes de un vector en IR2?
70. Sea E un espacio
N vectorial real de dimension nita y g un producto interior en
E ; esto es, g 2 02 E ' L2(E E; IR) simetrico y denido positivo: g(u; v) 0
y g(v; v) = 0 , v = 0.
a) Demostrar que es un isomorsmo la aplicacion : E ! E denida por
(u) (v) = g(u; v);
8u; v 2 E:
b) Demostrar que es un producto interior en E la aplicacion
gb : E E ! IR denida por bg(!; !0 ) = g 1(!); 1 (!0 ) 8!; !0 2 E :
c) Sea fe1 ; : : : :eng una base ortonormal de E con respecto a g y f1 ; : : : ; n g
su base dual en E . Demostrar que f1 ; : : : ; n g es ortonormal con respecto a
gb.
71. En un espacio vectorial real E , de dimenson n, interesa saber si los n3 numeros
Kijk , tales que vericanNque Kijk Lij son las componentes de un vector de E para
cualquier tensor L 2 2 E , son las componentes de un tensor de tipo (1; 2) o
no.
72. Tenemos un tensor A de tipo (0; 4) que satisface
Aijk` = Ajik` = Aij`k
Aijk` + Aik`j + Ai`jk = 0
1) Aijk` = Ak`ij
2) Si A(u; v; u; v) = 0 para todo u; v 2 E , entonces A = 0.
73. Sean E un espacio vectorial real de dimension n, fe1; : : : ; eng una base de E ,
f1 ; : : : ; n g su base dual en E y un tensor de tipo (0; 2). Probar:
Demostar:
a) =
n
X
i;j =1
(ei ; ej ) i j
b) Si fu1; : : : ; ung es otra base de E , (ei ; ej ) = aij , (ui; uj ) = bij y
uj = cij ei . Calcular bij en funcion de los aij .
74. Si v1; : : : ; vp son elementos de un espacio vectorial E :
v1 ^ ^ vp 6= 0 () fv1 ; : : : ; vp g son linealmente independientes
75. Encontrar la condicion necesaria y suciente para que aij sea de la forma uivj .
76. Si aij = aji y bij = bji , probar que
(ki `j + `i kj )aij = 0
aij bij = 0
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
196
Ejercicios
77. Sea una p{forma sobre E (espacio vectorial de dimension n sobre IR) i.e. una
aplicacion multilineal alternada. Se dene el producto interior de por v 2 E ,
y se denota por v , como la (p 1){forma denida por
(v )(v2 ; : : : ; vp) = (v; v2 ; : : : ; vp )
8v2; : : : ; vp 2 E
1) Demostar que si es una n{forma no nula, es un isomorsmo la aplicacion
V
f : E ! n 1 E v 7 ! f (v) = v 2) Toda (n 1){forma es descomponible (i.e., es el producto de (n 1)
1{formas).
78. Sea E un espacio vectorial. Si f1 ; 2 ; 3 g es una base de E , entonces
f1 2 2 1 ; 1 3 3 1 ; 2 3 3 2 g
V
es una base de 2 E .
N
79. Sea E un espacio vectorial real de dimension n. Para una p{forma ! 2 p E consideramos el subespacio de E :
E! = 2 E ^ ! = 0
Demostar que ! es descomponible si y solo si dim E! = p.
80. Probar que si fu1; u2g es una base del espacio vectorial IR2:
1) u1 u2 + u2 u1 no es descomponible.
2) 3u1 u1 + 5u1 u2 + 6u2 u1 + 10u2 u2 es descomponible.
81. Sean fe1; : : : ; eng una base de E , fe1; : : : ; eng su base dual, probar que, si
!=
X
1i<j n
V
!ij ei ^ ej 2 2E ;
! es descomponible () !ij !k` !ik !j` + !i`!jk = 0: i < j < k < l
82. Demostrar que si E es unVespacio vectorial de dimension 3, entonces todo
elemento homogeneo en E es descomponible. Si dim E > 3, entonces si
fv1; v2 ; v3; v4 g son linealmente independientes, v1 ^ v2 + v3 ^ v4 es indescomponible.
83. Si dim E = 4, entonces es descomponible () ^ = 0 y es homogenea.
n
X
1
n
i
Aij !j
(i = 1; : : : ; n). Demostrar que
84. Sea ! ; : : : ; ! 2 E y =
j =1
1
1
n
i
^ ^ = det(Aj )! ^ ^ !n.
85. Antisimetrizar los siguientes tensores:
1 2 + 2 2 ;
1 2 2 + 22 2 2 ;
1 2 2 1 ;
1 2 + 2 3 3 2 :
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Ejercicios
197
86. Demostrar que aunque siempre se verica que
Tij = T(ij) + T[ij]
no es en general cierto que
Tijk = T(ijk) + T[ijk]
87.
88.
89.
90.
91.
donde el ( ) indica simetrizacion y el [ ] antisimetrizacion.
Sea f 2 F(M) una funcion diferenciable sobre una variedad M, demostrar que
@fi denidas en cada entorno coordenado de funciones
las funciones ai = @x
coordenadas (x1 ; : : : ; xn ) denen un tensor de tipo (0,1) sobre M.
Interpretar A 2 T11 (M) como una aplicacion diferenciable que asigna a cada
punto x 2 M una aplicacion lineal Ax sobre Tx(M). Demostrar que (C11 A)(x) =
traza Ax (donde C es el operedor contraccion, Denicion 2.17).
Si i son las componentes de una 1{forma 2 (M), establecer que !ij =
@i @j
@xj @xi son las componentes de un campo de tensores de tipo (0,2) sobre M.
Si uij y vijk son componentes de campos de tensores covariantes de orden 2 y
3 respectivamente y antisimetricos, entonces
ij + @ujk + @uki
Tijk = @u
@xk @xi @xj
ijk @vjk` + @vk`i @v`ij
Kijk` = @v
@x`
@xi
@xj @xk
son componentes de campos tensoriales de tipo (0,3) y (0,4)
Sea M una variedad diferenciable. J un campo de tensores de tipo (1,1) en
M, tal que J 2(X ) = X; X 2 X(M). (Se dice que J es una estructura casi
compleja sobre M). Consideremos la siguiente aplicacion
S : X(M) X(M) ! X(M)
S (X; Y ) = [X; Y ] + J [JX; Y ] + J [X; JY ] [JX; JY ];
8 X; Y 2 X(M):
Demostrar que S es un campo de tensores de tipo (1,2), denominado tensor
de Nijenhuis.
92. Sea M = IR2. Consideramos para cada punto p 2 M, el endomorsmo sobre
Tp (M) dado por
@
@
@
@
+ b @y ! b @x + a @y
p
p
p
para a; b 2 IR. Demostrar que el campo tensorial p ! Jp dene una estructura
casi compleja sobre IR2. Vericar que el tensor de Nijenhuis es identicamente
nulo, S = 0 (Ver Ejercicio 91).
Jp : a @x
p
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
198
Ejercicios
93. Sea una forma diferencial. > ^ 0?
n)
94. En IR2n, calcular n = ^ ^, siendo la 2{forma diferencial
= dx1 ^ dx2 + dx2 ^ dx3 + + dx2n 1 ^ dx2n
95. Sean f1 ; : : : ; fn; g1; : : : ; gn funciones diferenciables sobre una variedad de dimension m 2n y sea la 2{forma ! = df1 ^ dg1 + + dfn ^ dgn. Comprobar
que
n)
!n = !^ ^! = ( 1)
n(n 1)
2
n! df1 ^ ^ dfn ^ dg1 ^ ^ dgn:
96. Sean X e Y campos de vectores IR2 denidos por
@ + 2xy @ ; Y = y @
X = x @x
@y
@y
y sea ! la forma diferencial sobre IR2 denida por
! = (x2 + 2y)dx + (x + y2 )dy:
Calcular [X; Y ]; d!. Comprobar que se verica la relacion entre el producto
corchete y la diferencial exterior.
97. Sea M una variedad diferenciable de dimension n, fX1 ; : : : ; Xn g una base de
campos de vectores y consideremos su base dual f!1; : : : ; !ng. Si [Xi ; Xj ] =
akij Xk , calcular d!i en funcion de akij .
98. Encontrar la diferencial exterior de las siguientes formas diferenciales en el
plano y espacios eucldeos tridimensional
a) x dx
b) x dy y dx
c) z dx + x dy + y dz
99. Consideremos la aplicacion
F : IR ! IR2
t 7 ! (x; y) = (t2; t3 )
y la 1{forma ! = x dy en IR2. Calcular F !.
100. Calcular f (dt), siendo f la funcion
f : IR2 ! IR
(x; y) 7 ! t = x y
+ x dy una 1{forma sobre IR2 f(0; 0)g y denotamos la res101. Sea ! = y dx
x2 + y2
triccion a S por = !jS1 . Si F : IR ! IR2 es la aplicacion denida por
F (t) = (cos t; sen t). Establecer que F = dt.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Ejercicios
199
102. Consideremos la aplicacion
F : IR2 ! IR2
(x; y) 7 ! (xy; 1)
Calcular F (dx); F (dy); F (y dx).
103. Sea ! = y dx + z dy + x dz 2 1(IR3). Calcular F !, estando F : IR2 ! IR3
dada por
F (u1; u2) = (sen u1 cos u2; sen u1 sen u2 ; cos u1 ):
104. Consideremos la transformacion lineal
F : IRn ! IRn F (x1 ; : : : ; xn) = (y1 ; : : : ; yn)
n
X
i
donde y = aij xj + bi , con aij ; bi 2 IR. Calcular F (dx1 + + dxn).
j =1
105. Sean M y N variedades diferenciables, ambas de dimension n, ! 2 n(M) una
n{forma diferencial sobre M, F : N ! M un difeomorsmo, tal que F (V ) =
U , para U y V entornos coordenado de funciones coordenados (x1 ; : : : ; xn ) y
(y1 ; : : : ; yn) sobre M y N, respectivamente. Demostrar que si ! = a dx1 ^ ^
dxn en U , entonces
F ! = (a F )J dy1 ^ ^ dyn en V
i
siendo J el jacobiano del difeomorsmo F , J = det( @(x@yj f ) )
106. Determinar todas las transformaciones lineales de IR2 que conservan la forma
diferencial ! = dx ^ dy.
107. En IR3 se considera la 2{forma diferencial
y dx) ^ dz
= (x dy
2
x + y2 + z2
Calcular F y F (d), donde F : IR3 ! IR3 esta denida por
x = r sen cos '; y = r sen sen '; z = r cos 108. Se considera la 1{forma diferencial sobre IR3
= y dx x dy + dz
a) Condiciones sobre la funciones f y g de clase C 1 de IR3 en IR para las que
la forma g df sea cerrada.
Mostrar que f y g son necesariamente independientes de z. >Puede darse
arbitrariamente g (independiente de z) y deducir f ?
b) Si las condiciones encontrados en a) se satisfacen, demostrar que para todo
x 2 IR3 las formas fdf; dg; g df g son independientes.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
200
Ejercicios
109. Sea x un punto del dominio U de una carta (U; ') de una variedad diferenciable
M de dimension n, tal que '(x) = a 2 IRn, la curva coordenada i pasando por
el punto x esta denida por
i : I ! U M
t 7 ! ' 1(a1 ; a2 ; ; ai + t; ; an )
Demostrar que _i(0) = @x@ i jx.
110. Encontrar las curvas integrales de los campos de vectores en IR2 denidos en
terminos de la carta identidad por
@ b) y @ x @ c) y @ x3 @ d) 2x @ y @
a) x @x
@x @y
@x
@y
@x @y
En cada caso encontrar los puntos crticos y determinar que campo de vectores
es completo.
111. Demostrar que es completo el campo de vectores en IR2 f(0; 0)g denido en
terminos de la carta identidad por
@ + @:
X = @x
@y
112. Encontrar las curvas integrales del campo de vectores en IR3 denido en terminos de la carta identidad por
@ +z @ + @ :
X = y @x
@y @z
113. Sean (U; '); (V; ) las dos cartas que denen el atlas estereograco en la esfera
S2; es decir, U = S2 f(0; 0; 1)g, V = S2 f(0; 0; 1)g, ' la proyeccion estereograca desde el punto (0; 0; 1) sobre el plano z = 0 y la misma proyeccion
desde el punto (0; 0; 1). Se consideran los campos de vectores
x1 @x@ 1 + x2 @x@ 2
y1 @y@ 1 y2 @y@ 2
en U y V respectivamente. Vericar que juntos denen un campo de vectores en S2, encontrar las curvas integrales de este campo y demostrar que es
completo.
114. Demostrar que los campos de vectores en IR2 denidos en terminos de la carta
identidad por
@
@
X = y @x
Y = 12 x2 @y
son completos y que su corchete no es completo.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Ejercicios
201
115. Hacer una representacion graca de los campos de vectores en IR2, cuyas componentes en el punto p = (x; y) se indican:
(a) X (p) = (0; 1) (b) X (p) = p (c) X (x; y) = (y; x) (d) X (x; y) = (y; x)
(e) X (x; y) = ( 2y; 21 x).
Encontar las curvas integrales de todos estos campos a traves del punto p =
(1; 1). Idem del punto p = (a; b).
116. Determinar cuales de los siguientes campos de vectores denidos en un abierto
U IR2 son completos:
(a) X (x; y) = (1; 0); U = IR2 (b) X (x; y) = (1; 0); U = IR2 f(0; 0)g
(c) X (x; y) = ( y; x); U = IR2 f(0; 0)g (d) X (x; y) = (1+ x2 ; 0); U = IR2:
117. Consideremos el campo de vectores X (x; y) = (1; 0) sobre IR2. Para t 2 IR y
p 2 IR2, sea t (p) = p(t), donde p es la curva integral de X pasando por p.
(a) Demostrar que para cada t 2 IR, t es una transformacion de IR2 en s
mismo. Geometricamente, de >que transformaciones se trata?
(b) Demostrar que
0 = 1IR2
t1 +t2 = t1 + t2 ; 8t1; t2 2 IR
t = t 1 ; 8t 2 IR.
(As t 7 ! t es un homeomorsmo del grupo de los numeros reales en el
grupo de las transformaciones del plano).
(c) Repetir los apartados anteriores para los campos de vectores:
(a) X (x; y) = ( y; x) (b) X (x; y) = (x; y) (c) X (x; y) = (y; x)
118. Sea la aplicacion F : IR2 ! IR2 , (x1 ; x2 ) 7 ! (y1 ; y2) = (x1 +x2 ; x1 x2 ), probar
que es un difeomorsmo. Encontrar el campo de vectores imagen mediante F
del campo de vectores X = x2 @x@ 1 + x1 @x@ 2 en IR2 referido a la carta identidad.
Determinar los grupos uniparametricos asociados a estos dos campos.
119. Encontrar en IR2 un sistema de coordenadas tal que una de las familias de
curvas parametricas sean las curvas integrales del campo de vectores Y =
(y; x).
120. El campo de vectores no nulo en IR2 denido en terminos de la carta identidad
por
@ + @;
X = ey @x
@y
determina una distribucion unidimensional E en IR2. Encontrar una carta en
IR2 adaptada a la distribucion.
121. Sea el sistema diferencial denida en IR3 por
! = yz dx + xz dy + dz:
Demostrar que es integrable y encontrar las supercies integrales.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
202
Ejercicios
122. Sea E la distrubucion denida en IR2 por la 1{forma
! = dy 3x2 dx:
Encontrar una carta en IR2 que sea adaptada a esta distribucion.
123. Sea S3 la 3{esfera, esto es, la subvariedad diferenciable de IR4 denida por la
ecuacion
x2 + y2 + z2 + t2 = 1:
Consideremos los campos de vectores
@ xy @ xz @ + x(1 t) @
X = (1 t x2 ) @x
@y
@z
@t
@ + (1 t y2 ) @ yz @ + y(1 t) @
Y = xy @x
@y
@z
@t
Sea S el conjunto de puntos de S3 exceptuando el (0,0,0,1).
a) Demostrar que X e Y son campos de vectores linealmente independientes
sobre S .
b) Sea E la distribucion en S generada por X e Y. Demostrar que la subvariedad bidimensional denida por las ecuaciones
z + kt = k
x2 + y2 + z2 + t2 = 1
kz t 6= 0
t 6= 1
1 < k < 1, son variedades integrales de E .
124. Sea !1; : : : ; !k 1{formas diferenciables independientes y cerradas sobre una
variedad M. Sea E el sistema diferencial dado en cada punto por
Ex = v 2 Tx(M) !xi (v) = 0; 8i 2 f1; : : : ; kg :
Probar que existen subvariedades N por cada x 2 M, tales que Tx(N) = Ex.
125. Consideremos los campos de vectores X1 ; X2 ; X3 2 X(IR3 f0g), dados por
@ y @ ; X =x @ z @ ; X =y @ x @ :
X1 = z @y
2
3
@z
@z @x
@x @y
Para cada x 2 IR3 f0g, Ex es el subespacio de Tx (IR3 f0g) generado por
fX1; X2 ; X3 g y E la distribucuion determinada por los Ex . Comprobar que E
es completamente integrable. Encontrar las subvariedades integrales.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Ejercicios
203
126. Demostrar que una variedad diferenciable conexa y orientable admite justamente dos orientaciones.
127. Una supercie M es orientable cuando existe una 2{forma sobre M que es
diferente de cero en cada punto de M. Demostrar que una supercie M en
IR3 es orientable si y solo si existe un campo vectorial normal Z en M que es
diferente cero en cada punto de M.
128. Calcular la expresion de la 2{forma del Ejercicio 127 en S2 en terminos de
las coordenadas dadas por
(i) La proyeccion estereograca.
(ii) Las cordenadas esfericas (; ; ') con = 1.
129. Probar que el espacio proyectivo P n(IRn) es una variedad orientable si y solo
si n es impar.
130. En IR2 consideremos D = B02 (1) (clausura de la bola de radio 1), demostrar
que D es un dominio en la variedad diferenciable IR2 con frontera S1 = @D.
131. Sea f : IR2 ! IR una funcion diferenciable de clase C 2 y D un dominio compacto de IR2; se supone que fj@D = 0. Demostrar la formula
Z @ 2f @ 2f Z " @f 2 @f 2#
f
+
dx ^ dy =
+
dx ^ dy
@x2 @y2
@y
D @x
y deducir que si
@ 2f + @ 2f = 0 sobre D; entonces f = 0:
jD
@x2 @y2
132. Consideremos la forma diferencial sobre IR3
! = (z x2 xy)dx ^ dy dy ^ dz + dz ^ dx
Integrar ! sobre el conjunto D = f(x; y; z) 2 IR3 =z = 0; x2 + y2 < 1g.
133. Sea = x2y+dxy2 y r el arco orientado denido por
D
x = r cos u; y = r sen u; z = r (r = cte: 0 u 2)
R
a) Calcular r :
b) Sea DR la region del cono denida por x2 + y2 z2 = 0; 0 < r1 < z < r2 .
Calcular D d, y vericar el Teorema de Stokes.
134. Sea
ydx
= 21 xdy
2
x + y2
Probar que es una 1{forma cerrada en IR2 f0g. Calcular la integral de sobre la circunferencia unidad. >Se sigue que no es exacta? Si i : S1 ,! IR2
es el embebimiento canonico >i es exacta?
Si se restringe al semiplano derecho x > 0, entonces si es exacta.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
204
Ejercicios
135. Sea D = f(x; y) 2 IR2 0 x =2; 0 y =2g. Calcular la integral
Z
D
sen(x + y)dxdy
136. Sea un arco orientado de IR3 denido por la parametrizacion
x = cos ; y = sen z = sen cos R
(0 2)
a) Calcular z dx:
b) Transformar esta integral en una integral doble extendida a la porcion de
supercie de ecuacion z = xy limitada por ; y encontrar as su valor.
137. Demostrar que sobre la esfera S2 IR3 se verica que
Z
2
Z
dx ^ dy = 0
2
(xdy ydx) ^ dz = 2
Z
2
zdx ^ dy:
138. Sea D la region denida por la relacion x2 + y2 = r2 ; 0 z h del cilindro
de IR3 . Vericar el Teorema de Stokes para la 1{forma
ydx
= xxdy
2 + y2 + z2 :
139. En una espacio de Riemann (M; g), sea la aplicacion r : X(M) X(M) ! X(M),
denida por la formula de Koszul:
2g(rX Y; Z ) = Xg(Y; Z ) + Y g(Z; X ) Zg(X; Y )
g(X; [Y; Z ]) + g(Y; [Z; X ]) + g(Z; [X; Y ])
Comprobar que para todo X; Y; Z 2 X(M), f 2 F(M), r verica:
A1 r es IR{lineal.
A4 [X; Y ] = rX Y rY X:
A2 rfX Y = f rX Y:
A5 Xg(Y; Z ) = g(rX Y; Z ) + g(Y; rX Z )
A3 rX fY = (Xf )Y + f rX Y:
140. Si X e Y son dos campos de vectores con expresion local
X=
n
X
i=1
Xi
@
@xi
e
Y=
n
X
j =1
Y j @x@ j
y si kij son los coecientes de una conexion lineal r sobre una variedad M,
n
X
@
r @ i @xj =
@x
k=1
k @ ;
ij @xk
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Ejercicios
205
establecer
a)
b)
1
0n
n X
n
k
X
X
k X iX j A @ :
rX Y = @ X j @Y
+
j
@x i;j=1 ij
@xk
k=1 j =1
n @ 2 x` @x
n
i j X
X
k @x @x @x
=
i;j;k=1
ij @x @x @xk +
`=1 @x
@x
@x`
en la interseccion U [ U de los abiertos de dos cartas locales (U; (x1 ; : : : ; xn )),
(U; (x1 ; : : : ; xn)).
141. Sea la parametrizacion de la esfera de radio a
~x(; ) = (a cos cos; a cos sen ; a sen )
Calcular la derivada covariante respecto a del campo de vectores unitario
formado por las tangentes unitarias a los meridianos a lo largo del paralelo
= 0.
142. Sea ~ una curva alabeada. Consideremos la supercie generada por las binormales : ~x(u; s) = ~ (s) + u~b(s). Calcular las derivadas covariantes a lo largo
de las curvas coordenadas del campo de vectores tangente unitario a las lneas
parametricas s = cte:
143. Sea C el paralelo = 0 sobre la esfera de ecuacion:
~x(; ) = (a sen cos; a sen sen ; a cos )
A) Probar que el transporte paralelo del vector ~x1 (0 ; ) a lo largo de C es
sen
(cos0 )( 0)
~x2 :
Y () = cos (cos0 )( 0) ~x1
sen0
B) Y (0) = Y (2) ) C es el ecuador.
144. Consideremos la esfera
~x(u1; u2) = (cos u2 cos u1; cos u2sen u1; senu2 )
Se desplaza paralelamente el vector p
de componentes (1,0) desde el punto de
coordenadas p
(0,0) hasta el punto (= 2; 0) a lo largo delpecuador, luego hasta
el punto (= 2; =4) a lo largo del meridiano u1 = = 2, despues hasta el
punto (0; =4) a traves del paralelo u2 = =4, y por ultimo hasta el punto
inicial por el meridiano u1 = 0. Determinar el angulo entre el vector dado y
el vector obtenido al nal del desplazamiento.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
206
Ejercicios
145. Coordenadas cilndricas en IR3. Sean r; '; z las coordenadas cilndicas usuales
en IR3. (r; '; z) es un sistema coordenado sobre IR3 f(x; y; z) 2 IR3 =x 0; y = 0g. Estas funciones coordenadas estan bien denidas y sus aplicaciones
inversas y campos de vectores basicos tienen la siguiente expresion:
Z
@
6
@' =rv
x = r cos '; y = r sen '; z = z
v
..HH
.. r HH
..
HH
@ = cos ' @ + sen ' @
..
HH
@
j @r
..
@r
@x
@y
..
z
..
@ = r v; v = sen ' @ + cos ' @
..
Y
.. . . . . . . . . . .
@'
@x
@y
. .
.. . ' . . . . . .
.
.
@ = @
.. .
@z @z
..
X
Se dice que un campo de vectores es paralelo si su derivada covariante respecto
a cualquier otro campo de vectores es nula; y que un campo de vectores es
paralelo a lo largo de una curva si su derivada covariante respesto al vector
tangente a la curva es nula.
Demostrar que que el campo de vectores @z@ es paralelo y que los campos @r@ y
@
@' son paralelos a lo largo de las rectas paralelas al eje Z .
146. Se dene la diferencial covariante de un campo tensorial A de tipo (r; s) sobre
una variedad diferenciable M, como el campo de tensores de tipo (r; s + 1),
rA, tal que
(rA)(X1 ; : : : ; Xs; X; 1 ; : : : ; r ) = (rX A)(X1 ; : : : ; Xs ; 1 ; : : : ; r )
para todo X; Xi 2 X(M) y j 2 1(M).
Comprobar que, si respecto a un sistema coordenado las componentes de A
son Aij11ijrs , las de rA vienen dadas por
r X
n
@Aji11ijrs X
+
Aij11ijrs ;k = @x
k
=1 `=1
s X
n
X
=1 h=1
i Ai1 i 1 `i+1 ir
k` j1 js
h Ai1 ir
kj j1 j 1 hj+1 js
!
!
:
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Ejercicios
207
147. Si Y es un campo de vectores sobre una curva , entonces
rY (s) = lim 1 1 Y (s + t) Y (s)
t!0 t t
dt
donde t es el desplazamiento paralelo a lo largo de la curva de (s) a (s+t).
148. En una variedad M con una conexion r, respecto a un sistema de coordenadas
(x1 ; : : : ; xn ), denimos las componentes del tensor curvatura por
@ @ @ X
n
R @xk ; @x` @xj = Rijk` @x@ i :
i=1
Entonces
n
@ ikj X
h i
h i :
+
`j
kh
kj `h
`
@x h=1
149. Sea r la conexion de Levi{Civita sobre una variedad de Riemann (M; g). Consideremos en un entorno abierto U de M un campo de referencias fE1: : : : ; Eng
y sus correspondientes 1{formas duales f1 ; : : : ; n g, denimos las formas de
conexion jk por
jk (Ei) = kij ;
siendo kij los smbolos de Christoel en U respecto a fE1; : : : ; Eng; o sea
n
X
k Ek . Establecer
rEi Ej =
ij
Rijk` =
k=1
rX Ei =
di =
dgij =
n
X
k=1
n
X
j =1
n
X
k=1
@ i`j
@xk
ik (X )Ek
(1a ecuacion de estructura)
j ^ ji
ik gkj + jk gki
donde gij = g(Ei ; Ej ).
En particular, si fE1; : : : ; Eng es una referencia ortonormal
n
X
i
d = j ^ ji ;
j =1
jk + kj = 0:
150. Sea U un entorno abierto en una variedad semi{riemanniana (M; g) tal que
sobre U esta denido un campo de referencias fE1; : : : ; Eng y sus 1{formas
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
208
Ejercicios
duales f1 ; : : : ; n g. Si Rjik` son las componentes del tensor curvatura respecto
a esta referencia; es decir,
R(Ek ; E`)Ei =
n
X
j =1
Rjik`Ej ;
denimos las n2 2{formas ji , llamadas formas de curvatura, por
ji =
Vericar que
ji = dij
X
1k<`n
n
X
k=1
Rjik`k ^ ` = 12
ik ^ kj
n
X
k;`=1
Rjik`k ^ ` :
(2a ecuacion de estructura)
donde jk son las formas de conexion, dadas por jk (Ei ) = kij , y kij los smbolos
de Christoel en U , respecto a fE1; : : : ; Eng:
151. Probar que dada una conexion lineal arbitraria de coecientes ijk , los coecientes
i
1 i
i
jk = 2 ( jk + kj )
denen una nueva conexion. Sea
K`k =
n X
i=1
i
i`;k
n
i X
=:
ik;`
i=1
@ ii`
@xk
!
@ iik :
@x`
>Son las K`k componentes de un tensor de tipo (0; 2)?
152. Probar que respecto a una conexion simetrica (sin torsion), para cualquier una
1{forma , se tiene i;j j;i = i;j j;i . Y para A 2 T02 (M), antisimetrico:
Aij;k + Ajk;i + Aki;j = Aij;k + Ajk;i + Aki;j :
153. En una variedad semi{riemanniana M, con tensor metrico g y tensor curvatura
R, denotamos por jgj el determinante de (gij ) respecto a un sistema coordenado
(x1 ; : : : ; xn ).
Establecer que
p
n
X
i = 1 @ lnjg j = p1 @ jg j :
ik 2 @xk
jgj @xk
i=1
Deducir de esto que la contraccion C11R = 0.
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
BIBLIOGRAFIA
[1] M. Berger; B. Gostiaux.- Geometrie dierentielle. Armand Colin, Paris,
1972
[2] M. Berger; B. Gostiaux.- Dierential Geometry: Manifolds, Curves, and
Surfaces. Springer{Verlag, New York, 1988
[3] W.M. Boothby.- An Introduction to Dierential Manifolds and Riemannian
Geometry. Academic Press, New York, 1983
[4] F. Brickell; R. S. Clark.- Dierenciable Manifolds. Van Nostrand Reinhold,
1970
[5] M.P. do Carmo.- Geometria riemanniana. IMPA, Rio de Janeiro, 1983
[6] N. Hicks.- Notas sobre Geometra Diferencial. Editorial Hispano Europea,
Barcelona, 1974
[7] B. O'Neill.- Semi{riemannian geometry, with applications to relativity. Academic Press, New York, 1983
[8] Pham Mau Quan.- Introduction a la geometrie des varietes dierentables.
Dunod, Paris, 1969
[9] I.M. Singer; J.A. Thorpe.- Lecture notes on elementary topology and geometry. Scott, Foresmann o Springer-Verlag, 1967
[10] F.W. Warner.- Foundations of dierentiable manifolds and Lie groups. Scott,
Foresmann and Company, Illinois, 1971
209
210
SIMBOLOS
[A] : saturado de A : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 10
(A; i) : subvariedad canonica : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 31
A : atlas : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 3
B0n(") : Bola abierta de radio " y centro en el origen : : : : : : : : : : : : : : : : : : : : : : : 2
Bk (M; d) : formas diferenciales exactas : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 88
c(A) : contenido de A : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 126
C0n(") : Entorno abierto cubico de lado " y centro en el origen : : : : : : : : : : : : : : 2
C k : clase k : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1
C 1 : clase 1 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 2
C ! : analtica : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 2
C : n
umeros complejos no nulos : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 43
k
C` : contraccion : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 59
dxi : diferencial de las funciones coordenadas : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 25
df : diferencial de f : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 26
Df : dominio de f : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 12
D(x) : derivaciones en x : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 20
DX Y : derivada covariante en IRn : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 143
E : distribucion o sistema diferencial : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 107
F(x) : funciones diferenciables en x : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 12
F(M) : funciones diferenciables en M : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 12
F(M1 ; M2) : aplicaciones diferenciables de M1 en M2 : : : : : : : : : : : : : : : : : : : : : : : 14
F : imagen recproca : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 27
F : aplicacion inducida entre espacios tangentes : : : : : : : : : : : : : : : : : : : : : : : : : : 23
F~ : aplicacion leida en cartas : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 28
G : grupo de Lie : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 42
GL(n; IR) : grupo lineal general : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 6
gl(n; IR) : matrices cuadradas de orden n con coeentes reales : : : : : : : : : : : : : 43
G (M) : algebra de Gassmann : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 82
H k (M; d) : grupo de cohomologa de de Rham : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 88
Hv : subespacio horizontal en T (M) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 160
211
212
Smbolos
J (h) : jacobiano de h : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 71
L(E; F ) : aplicaciones lineales : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 56
L2 (E F; G) : aplicaciones bilineales : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 55
s)
Ls (E E; IR) : aplicaciones multilineales : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 59
s)
r)
Ls;r (E E E E ; IR) : aplicaciones multilineales : : : : : : : : : : : : : : 61
L(M) : brado de referencias lineales sobre M : : : : : : : : : : : : : : : : : : : : : : : : : : : : 164
LX Y : derivada de Lie de un campo de vectores : : : : : : : : : : : : : : : : : : : : : : : : : 100
LX K : derivada de Lie de un campo de tensores : : : : : : : : : : : : : : : : : : : : : : : : : 104
m(A) : medida de A : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 126
M : variedad diferenciable : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 4
(M; A) : estructura diferenciable : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 4
(M; g) : variedad riemanniana o de Riemann : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 117
(N; F ) : subvariedad : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 31
O(n) : grupo ortogonal : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 49
Pn(IR) : espacio proyectivo : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 6
IRn : espacio eucldeo n{dimensional : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 2
IR : numeros reales no nulos : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 43
sop(g) : soporte de g : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 77
Sn : esfera unidad : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 5
SL(n; IR) : grupo lineal especial : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 48
SO(3; IR) : grupo ortogonal especial : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 9
T (E ) : algebra tensorial : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 58
T (M) : brado tangente : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 70
T (M) : brado cotangente : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 73
Tx(M) : espacio tangente a M en x : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 17
Tx (M) : espacio cotangente a M en x : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 25
Tsr (M) : brado tensorial : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 76
(U; ') : sistema coordenado o carta local : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 2
v(f ) : derivada direccional : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 143
vol D : volumen de un dominio de integracion : : : : : : : : : : : : : : : : : : : : : : : : : : : 132
Vv : subespacio vertical en T (M) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 160
X= : espacio cociente : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 10
Z k (M; d) : formas diferenciales cerradas : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 88
ji : deltas de Kronecker : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 25
_ : vector tangente a una curva : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 24
: signatura de la permuracion : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 63
A : funcion caracterstica : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 127
(M) : formas diferenciables : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 81
1(M) : 1{formas diferenciables : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 74
k (M) : k{formas diferenciables : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 81
nI(M) : n{formas integrables : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 130
Sp : grupo de permutaciones de p elementos : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 63
T(M) : campos de tensores diferenciables : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 80
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
Smbolos
213
Trs (M) : campos de tensores de tipo (r,s) diferenciables : : : : : : : : : : : : : : : : : : : : : 77
X(M) : campos de vectores diferenciables : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 72
@D : borde de D : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 126
@ M : borde de una variedad : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 135
@ : vectores tangentes basicos : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 17
@xi
[a; b] : intervalo cerrado : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 24
(E F; ') : producto tensorial de dos espacios vectoriales : : : : : : : : : : : : : : : : : 51
f1 f2 : producto tensorial de aplicaciones lineales : : : : : : : : : : : : : : : : : : : : : : : 54
u v : producto tensorial de vectores : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 53
^ : producto exterior de formas : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 64
N^r : producto exterior de formas : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 67
espacio tensorial contravariante de grado r : : : : : : : : : : : : : : : : : : : : : : : : : 57
N EE :: espacio
covariante de grado s : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 57
Nsr E : espacio tensorial
tensorial de tipo (r,s) : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 57
Nrs T (M) : tensores
tipo (r; s) en x : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 69
VpsE x : espacio de lasdep{formas
V E : algebra exterior : : : : : : : : : :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: :: 63
63
Vp E : espacio de tensores contravariantes antisimetricos : : : : : : : : : : : : : : : : : : 68
V E : algebra exterior : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 68
Vp T (M) : espacio de las p{formas en x : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 69
x
rX Y : derivada covariante de Y con respecto a X : : : : : : : : : : : : : : : : : : : : : : 145
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
214
Smbolos
Variedades diferenciables: Angel Montesdeoca: La Laguna; 1997
INDICE ALFABETICO
1{forma 25
| diferencial 74
1{formas de conexion 174
1a ecuacion de estructura 148
2a ecuacion de estructura 148
abierto coordenado 2
algebra de Grassmann 65
| de Grassmann 82
| de Lie 73
| exterior 65
| exterior 82
| graduada 58
| tensorial 58
angulos de Euler 9
aplicacion abierta 10
| analtica 2
| diferenciable 2, 13
| inducida por F 23
| lineal tangente 23
atlas 3
| diferenciable 3
| equivalentes 4
| estereograco 95
| maximal 3
banda de Moebius 7
base canonica de vectores tangentes 17
| local de una distribucion 107
bases con misma orientacion 120
| orientadas 120
| positivamente orientadas 120
borde de una variedad 135
cambio de base de vectores tangentes 18
campo de referencias basico 165
| de tensores denido positivo 117
| de vectores 72
| | completo 94
| | fundamental 172
| | generador 97
| | horizontal 162, 167
| | vertical 165
| tensorial 76
215
carta 2
cociente Hausdor 11
| segundo contable 10
coecientes de la conexion 146
| de la conexion 150, 158
completamente integrable 107
componente horizontal 163
| vertical 163
componentes de un tensor 57
| del campo de tensores curvatura 147
| del campo de tensores torsion 146
| del cochete 73
conexion 150, 167, 174
| en una supercie 145
| , enfoque clasico 148
| , enfoque tensorial 148
| lineal 144, 146, 158
| natural en IRn 144, 145
| | | , propiedades 144
| riemanniana 155
| simetrica 147
| sin torsion 147
| sobre T (M) 162
conjunto estrellado 91
contenido nulo 126, 128
contraccion 59
convenio de Einstein 148
corchete 73
covector 25, 69
criterio de tensorialidad 58
curva en una variedad 24
| horizontal 168
| integral 93
curvatura 147, 178
| escalar 156
deltas de Kronecker 25
derivacion 20, 104
| covariante 149
| de grado 0 105
derivada covariante 143, 145, 150
| covariante de un tensor 152
| de Lie 100
desplazamiento paralelo 158
difeomorsmo 15
diferencial de una aplicacion 23
| de una funcion 26
| exterior 83
distribucion 107
| diferenciable 107
| horizontal 162, 167
| involutiva 107
dominio de integracion 126, 129
| regular 136
ecuacion de estructura 207, 208
ecuaciones de estructura 176
| de estructura de Cartan 148
elemento de volumen 126
embebimiento 31
esfera 5
espacio cotangente 25
| de Riemann 154
| de las conguraciones 8
| proyectivo Hausdor 11
| proyectivo real 6
| proyectivo segundo contable 11
espacio tangente 17
| topologico Hausdor 2
| topologico segundo contable 2
| topologico separado 2
| vectorial orientado 120
estructura diferenciable 3
bra 73, 165
brado cotangente 73
| de las k{formas 81
| de referencias lineales 165
| tangente 70
| tensorial 76
forma 65
| cerrada 87
| curvatura 148
| exacta 87
| torsion 148
formas canonicas 176
| de conexion 147, 207, 208
| de curvatura 208
funcion caracterstica 127
| casi continua 126
| coordenada 2
| de clase C k 1
| diferenciable 1, 12
| integrable 129
funciones coordenadas 2
grupo de Lie 42
| de cohomologa de de Rham 88
| lineal especial 48
| lineal general 6
| ortogonal 49
216
| uniparametrico de transformaciones 96
| | generado por X 97
helice circular 31
homeomorsmo coordenado 2
identidad de Bianchi 156
| de Jacobi 73
imagen recproca 27
inmersion 30
integral de f 133
k{forma 65
| diferencial 81
levantamiento horizontal 168
| horizontal de una curva 168
localmente eucldeo 2
medida nula 126, 129
metrica riemanniana 117
n{forma integrable 129
operador antisimetrizacion 63
| simetrizacion 63
orientacion en una variedad 122
| inducida 136
p{forma diferencial 69
paracompacto 10
particion de la unidad 118
particion de la unidad subordinada 118
placa 35
primera forma fundamental 117
producto exterior 64
| tensorial 51
punto crtico 94
rango de una aplicacion 28
recta binormal 205
recubrimiento localmente nito 10
renamiento de un recubrimiento 10
relacion de equivalencia abierta 10
relativamente compacto 128
saturado 10
seccion local canonica 165
smbolos de Christoel de 2a especie 155
sistema coordenado 2
| coordenado adaptado 35, 107
| coordenado cubico 34
| diferencial 107
soporte 77
| de un campo de vectores 99
subespacio horizontal 160, 162, 167
| ortogonal 114
submersion 30
subvariedad 31
| embebida 31
| inmersa 31
| regular 37
subvariedades equivalentes 31
tensor 58
| antisimetrico 63
| contravariante 57
| | en un punto de una variedad 69
| covariante 57
| | en un punto de una variedad 69
| curvatura 153
| de Ricci 155
| de tipo (r,s) 57
| | en un punto de una variedad 69
| descomponible 59
| gravitatorio de Einstein 156
| homogeneo 59
| simetrico 63
| torsion 153
teorema de Frobenius 110
| de Green 140
| de Stokes 137
| de Stokes 142
| de la divergencia 141
| del rango 29
torsion 146, 178
transformacion 96
transporte paralelo 158
| paralelo 169
traslacion a la derecha 48, 165
| a la izquierda 48
variedad con borde 134
| conexa 9
| conexa por arcos 9
| diferenciable 4
| inducida 5
| integral 107
| localmente compacta 9
| localmente conexa 9
| orientable 121
| orientada 122
| paralelizable 145
variedad producto 5
| riemanniana o de Riemann 117
| topologica 2
variedades difeomorfas 15
vector cotangente 25
| horizontal 162
| tangente 16
| tangente a la curva 24
| vertical 160
vectores horizontales 167
volumen de un dominio de integacion 132
217
218