6.- Principios de la Mecánica Clásica. La ley de la Inercia.
Anuncio

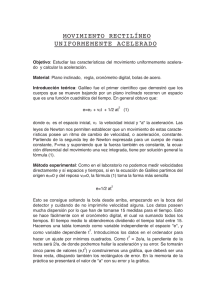
6.- Principios de la Mecánica Clásica. La ley de la Inercia. §6.1. Mecánica Clásica (144); §6.2. Las Leyes de la Mecánica (145); §6.3. Las leyes del movimiento (146); §6.4. La ley de la inercia (147); §6.5. Referenciales inercial y noinercial (149); §6.6. Buscando un referencial inercial (151); §6.7. Transformación de Galileo (154); §6.8. Principio de Relatividad de Galileo (156); Problemas (159) En las lecciones anteriores hemos aprendido a describir el movimiento de los cuerpos. Intentaremos ahora profundizar en las causas del movimiento investigando la razón por la cual los cuerpos se mueven del modo en que lo hacen. Nuestro estudio nos va a conducir a los conceptos de masa y de fuerza, conceptos que nos permitirán establecer leyes generales a las que obedecen todos los movimientos. Nos remontaremos así desde la descripción de movimientos particulares a conclusiones de muy amplia validez sobre el funcionamiento del mundo físico. La observación diaria nos permite distinguir movimientos muy diversos en los objetos al alcance de nuestros sentidos. Los antiguos griegos clasificaron los movimientos en tres categorías fundamentales: (1) El movimiento de los cuerpos provocado por otros cuerpos en contacto directo (v.g., un caballo tirando de un carro). (2) El movimiento de los objetos que caen libremente hacia el suelo (v.g., fruta desprendida de un árbol). (3) El movimiento de los astros, unas veces regular e inmutable (estrellas) y otras veces aparentemente caprichoso (planetas). Para la primera categoría de movimientos se disponía de una explicación inmediata: Cuando el caballo tira del carro, éste se mueve bajo la acción directa de la tracción realizada por el caballo; cuando la tracción cesa el movimiento también cesa. Es decir, en ausencia de fuerzas no podría haber movimiento y, además, una fuerza constante produciría un movimiento uniforme, ya que para mantener constante la velocidad del carro el caballo debería ejercer una fuerza constante sobre el carro. Estas afirmaciones se revelarían erróneas tras los trabajos de Galileo y Newton. Física Universitaria 143 144 Lec. 6.- Principios de la Mecánica Clásica. La ley de la Inercia. Se disponía también de una explicación simple para la segunda categoría de movimientos. ARISTÓTELES1 afirmaba que puesto que la Tierra era el centro del Universo, todos los cuerpos "pesados" tendían a caer de una forma natural hacia éste. Así se explicaba la caída libre. Por último, los cuerpos celeste estarían formados por una sustancia esencialmente distinta de la de los cuerpos terrestres, de modo que tendrían la propiedad de autopropulsarse. Esto es, la causa del movimiento de los cuerpos celestes estaría en ellos mismos. Tratándose de dioses (Venus, Marte, ...) esta entelequia no resultaba descabellada; lo menos que se le podía pedir a un dios es que se moviese por sí mismo. Este primer intento de explicar las causas de los movimientos adolece de los defectos de un tratamiento no científico de la realidad. Hipótesis distintas para los diferentes tipos de movimientos, en lugar de sintetizar el fenómeno del movimiento en el marco de una teoría única. Hipótesis fantásticas, como la de la naturaleza divina de los astros, o simplemente erróneas, como la de que en ausencia de fuerza no hay movimiento. En definitiva, ausencia total de experimentación en el examen del fenómeno y de un análisis riguroso de los resultados experimentales. Hoy sabemos que la materia de que están hechas las estrellas es la misma de la que están hechos los objetos terrestres y hemos aprendido a prescindir de los dioses. Sin embargo, las explicaciones que dieron los griegos al fenómeno del movimiento, en las circunstancias de su época y con los medios a su alcance, merecen nuestro respeto: el respeto que inspira la mente del hombre cuando se interroga sobre el significado de sí mismo y de su entorno. §6.1. Mecánica Clásica.- El estudio de la relación existente entre el movimiento de un cuerpo y las causas de dicho movimiento constituye una rama de la Física que se denomina Dinámica. La experiencia nos muestra que el movimiento de un cuerpo es el resultado directo de sus interacciones con los demás cuerpos que lo rodean y que constituyen su medio ambiente. En general, sólo incluiremos en dicho medio ambiente los cuerpos cercanos pues los efectos de los cuerpos más alejados ordinariamente son insignificantes. Así, cuando un jugador de golf golpea la pelota, su acción sobre ella modifica el estado de movimiento de la pelota, y la posterior trayectoria parabólica de ésta no es sino el resultado de su interacción con la Tierra. Análogamente, el movimiento de un electrón alrededor del núcleo de un átomo es el resultado de las interacciones del electrón con el núcleo y con los otros electrones. Las interacciones se describen convenientemente introduciendo el concepto físico-matemático que denominamos fuerza. De este modo, la Dinámica es básicamente el análisis de la relación existente entre las fuerzas y los cambios de movimiento de los cuerpos. 1 ARISTÓTELES (384-322 a.c.). Nació en Macedonia, por lo que se le llama «el Estagirita». Fue discípulo de Platón y maestro de Alejandro el Magno. Fundó en Atenas (334) una escuela filosófica. Gran investigador y pensador profundo, sólo construía sus teorías sobre hechos experimentales. Fue el creador de la terminología filosófica y el fundador de la Lógica, de la Psicología, de la Poética, de la Historia Natural y de la Metafísica. §6.1.- Mecánica Clásica. 145 Se denomina Dinámica Clásica o Newtoniana la teoría que formularon GALILEO y NEWTON para relacionar las fuerzas y el movimiento; esta teoría constituye una de las más poderosas armas de investigación de la Naturaleza que ha sido inventada y sus resultados influyeron todo el desarrollo de la Física a partir del siglo XVIII. Se basa en ciertos postulados razonables (leyes de Newton) y tuvo un éxito espectacular en la explicación de los movimientos de los planetas, de los cuerpos sobre la superficie terrestre y de las propias moléculas. Es difícil encontrar en la Física otra teoría cuyo campo de validez sea tan extenso. La Dinámica Clásica, junto con la Cinemática de Galileo y la Estática, constituye ese grandioso edificio que es la Mecánica Clásica, ciencia que aún hoy permite resolver una infinidad de problemas prácticos. No obstante, las leyes de la Mecánica Clásica resultan inadecuadas y deben modificarse cuando los cuerpos se mueven con velocidades muy grandes, próximas a la velocidad de la luz c ≈ 300 000 km/s, y cuando se utilizan para la descripción de fenómenos a pequeña escala, como los que se presentan en la Física Atómica y Nuclear. En el primer caso, la Mecánica Clásica se sustituye por la Mecánica Relativista, debida principalmente a Albert EINSTEIN (1879-1955), y en el segundo por la Mecánica Cuántica, desarrollada inicialmente por Max PLANCK (1858-1947). Sin embargo, la Mecánica Relativista y la Mecánica Cuántica incluyen a la Mecánica Clásica como caso límite. Así, dentro de su campo de validez, la Mecánica Clásica nos proporciona una descripción satisfactoria de los fenómenos físicos. §6.2. Las Leyes de la Mecánica.- El problema central de la Mecánica Clásica de las partículas es el siguiente: (1) Tenemos una partícula cuyas características físicas (masa, carga, momento dipolar magnético, ...) conocemos; (2) Colocamos esta partícula, con una cierta velocidad inicial conocida, en un medio ambiente del que tenemos una descripción completa; (3) Problema: ¿Cuál será el movimiento subsiguiente de la partícula? Este problema fue resuelto, al menos para una gran variedad de medios ambiente, por Newton cuando propuso las leyes del movimiento y formuló su ley de Gravitación Universal. El método a seguir para resolver el problema, de acuerdo con nuestra forma de entender hoy día la Mecánica Clásica, es el siguiente: (a) Introduciremos el concepto de fuerza F, definiéndolo en función de la aceleración a que adquiere un cierto cuerpo patrón. (b) Desarrollaremos algún procedimiento para asignar una masa m a cada cuerpo, con objeto de entender porque los cuerpos de una misma naturaleza experimentan distintas aceleraciones al encontrarse en un mismo medio ambiente. (c) Trataremos de encontrar el modo de calcular las fuerzas que obran sobre los cuerpos a partir de las propiedades de éstos y de las del medio ambiente; esto es, buscaremos las leyes de las fuerzas. 146 Lec. 6.- Principios de la Mecánica Clásica. La ley de la Inercia. El concepto de fuerza, que no es más que una técnica para relacionar el medio ambiente con el movimiento de la partícula, aparece tanto en la leyes del movimiento (que nos dicen que aceleración experimentará un cuerpo bajo la acción de una fuerza dada) como en las leyes de las fuerzas (que nos permiten calcular la fuerza que actuará sobre un cuerpo dado al colocarlo en un medio ambiente determinado). Las leyes del movimiento y las leyes de las fuerzas consideradas conjuntamente constituyen las leyes de la Mecánica. §6.3. Las leyes del movimiento.- Las leyes del movimiento relacionan la aceleración de un cuerpo con su masa y con la fuerza que actúa sobre él. Hasta aquí estamos empleando los términos fuerza y masa de un modo bastante impreciso. Hemos identificado a la fuerza con la influencia del medio ambiente; intuitivamente pensamos que una fuerza es como un empuje o una tracción semejante a la que ejercen nuestros músculos. Por otra parte, nos hacemos idea de un cuerpo de gran masa como algo grande y pesado. Estas nociones intuitivas son correctas durante la conversación cotidiana, pero no lo son para un enunciado preciso de las leyes del movimiento ni para la aplicación de dichas leyes a los problemas de la Física. Si queremos comprender las leyes del movimiento, y si las queremos aplicar correctamente, debemos definir los conceptos con todo cuidado; lo que haremos más adelante, describiendo métodos para su medida, mediante lo que se denomina una definición operacional. De momento vamos a limitarnos a enunciar y revisar en forma general las leyes del movimiento, para estudiar después más profundamente sus contenidos. Durante muchos siglos el problema del movimiento y de sus causas fue un tema central de la Filosofía Natural. Las primeras ideas acerca del movimiento aceptadas generalmente fueron las de ARISTÓTELES, que prevalecieron hasta el siglo XVII, en que fueron impugnadas por GALILEO2, quien negó que Aristóteles hubiera experimentado con los cuerpos en movimiento y demostró experimentalmente que todos los cuerpos caen con igual movimiento (experimentos en la torre inclinada de Pisa) en contra de lo dicho por Aristóteles de que los cuerpos más pesados caían más deprisa. NEWTON3, nacido en Inglaterra el mismo año en que muere Galileo, fue el gran arquitecto de la Mecánica Clásica. Llevó a cabo una admirable fructificación y 2 GALILEO GALILEI (1564-1642). Físico, matemático y astrónomo italiano. Fue profesor en las Universidades de Pisa (1587) y de Padua (1592-1610). Puso los cimientos de la ciencia del movimiento de los cuerpos (Dinámica), base de la Mecánica actual. Descubrió las leyes de la caída de los cuerpos y la ley del péndulo y estableció el fundamento de la ley de la inercia. Realizó observaciones astronómicas (con un anteojo de su invención) y descubrió los satélites de Júpiter, el anillo de Saturno y las fases de Venus. Sus descubrimientos astronómicos le llevaron a impugnar el Sistema Geocéntrico de Ptolomeo y a defender el Sistema Heliocéntrico de Coopérnico, lo que le creó graves problemas con la Inquisición (1633). 3 Sir Isaac NEWTON (1642-1727). Físico, matemático y astrónomo inglés. Fue profesor de Física en la Universidad de Cambridge (1669-1701) y presidente de la Royal Society de Londres desde 1703. Por su extraordinarios méritos recibió el tratamiento de Sir (1705). Se le considera el fundador de la Mecánica Clásica y de la Mecánica Celeste. Estudió las leyes del movimiento de los planetas, descubrió la Ley de la Gravitación (1686) e ideó el cálculo de fluxiones (antecedente del Cálculo Diferencial e Integral). Sus trabajos se extendieron también a los campos de la Óptica y de la Acústica. 147 §6.3.- Las leyes del movimiento. síntesis de las ideas de Galileo y de otros sabios que le habían precedido y enunció las tres leyes del movimiento, que hoy llevan su nombre, que fueron presentadas por primera vez en 1686 en su obra Principia Mathematica Philolophiæ Naturalis. Es interesante recordar la versión de Newton de dichas leyes del movimiento. LEY I.- Todo cuerpo permanece en su estado de reposo o de movimiento rectilíneo y uniforme a menos que se le obligue a variar dicho estado mediante fuerzas que actúen sobre él. En otras palabras, sin la acción de las fuerzas no pueden haber aceleraciones. Hay dos ideas importantes contenidas en esta ley: La primera es una definición cualitativa de fuerza como agente capaz de modificar el estado de movimiento de un cuerpo; la segunda es la de que el reposo (v=0) y el movimiento rectilíneo uniforme (v=cte.) son dos estados enteramente equivalentes para un cuerpo material. LEY II.- La variación del movimiento es proporcional a la fuerza que actúa sobre el cuerpo y se realiza en la dirección de la recta en que actúa la fuerza. Este enunciado es válido también en el marco de la Mecánica Relativista. De nuevo nos aparece la fuerza como el agente capaz de modificar el estado de movimiento de un cuerpo, esto es de producir aceleraciones. La segunda ley del movimiento de Newton constituye una definición dinámica de fuerza cuando se expresa en la forma F ma [6.1] postulándose previamente el valor de la masa para una partícula material dada. LEY III.- A toda acción se le opone siempre una reacción igual; o sea, las acciones mutuas entre dos cuerpos, uno sobre otro, son siempre iguales y se dirigen en sentidos opuestos. Dicho de otro modo: las fuerzas se presentan por parejas. Si el cuerpo 1 ejerce una fuerza F21 sobre el cuerpo 2, el cuerpo 2 ejercerá una fuerza F12 sobre el cuerpo 1, de modo que F12 F21 [6.2] COROLARIO I.- Un cuerpo sobre el que actúan simultáneamente dos fuerzas se moverá según la diagonal de un paralelogramo en el mismo tiempo en que describiría los lados del mismo mediante la acción de dichas fuerzas por separado. Esto es, las fuerzas obedecen la ley de la suma del paralelogramo. Por tanto este Corolario expresa el carácter vectorial de las fuerzas. §6.4. La ley de la inercia.- Antes de Galileo se creía que para mantener un cuerpo en movimiento, incluso en movimiento rectilíneo uniforme, era necesaria la acción continuada de una fuerza sobre él. El fundamento de esta idea radicaba en la creencia de que el "estado natural" de un cuerpo era el reposo, de modo que si el cuerpo no era impulsado constantemente se detendría de un modo "natural". 148 Lec. 6.- Principios de la Mecánica Clásica. La ley de la Inercia. La comprobación experimental de tales ideas deberá comenzar por encontrar el modo de liberar un cuerpo de todas las influencias de su medio ambiente, esto es, de todas las fuerzas que pueden actuar sobre él, para ver posteriormente como se comporta bajo esta circunstancia de ausencia de acción exterior. Es difícil realizar este tipo de experiencia, en las que todas las fuerzas hayan sido eliminadas; ésta es una idealización muy grande y fue necesario un genio como Galileo para percibir, a partir de experiencias relativamente burdas, que la Ley de la Inercia es válida. Una partícula libre es aquélla que no está sujeta a interacción alguna. Estrictamente no existe tal cosa, ya que toda partícula interacciona con el resto del Universo; la partícula libre debería estar completamente aislada, o ser la única partícula en el Universo. Sin embargo es posible, en la práctica, considerar algunas partículas como libres, ya sea porque se encuentren suficientemente alejadas de otras partículas, de modo que las interacciones resulten suficientemente débiles para ser despreciadas o porque las interacciones con las otras partículas se cancelen, dando una interacción neta nula. Por otra parte podemos estudiar el movimiento conforme vamos consiguiendo que las fuerzas que actúan sobre el cuerpo sean cada vez más y más pequeñas, de modo que por extrapolación podamos hacernos una idea de cómo sería el movimiento en la ausencia total de fuerzas. Consideremos un objeto, digamos un bloque, descansando sobre una superficie horizontal lisa, como la de una mesa. Observemos que si el bloque está en reposo (respecto a la mesa) permanecerá en esta situación a menos que le empujemos o tiremos de él. En el sentido vertical podemos considerar el bloque como "libre" de acción exterior, ya que su peso P está exactamente compensado con la reacción normal N de la mesa sobre él. Si lanzamos el bloque de modo que deslice sobre la mesa podremos observar que su movimiento se irá haciendo cada vez más lento hasta que finalmente se detiene. De hecho, esta observación era la base para sostener la idea de que el movimiento tenía que cesar cuando la fuerza exterior, en este caso la ejercida por la mano que empujó al bloque, dejase de actuar. Sin embargo, Galileo arguyó contra esta Figura 6.1 idea atribuyendo la disminución de velocidad a la fuerza de rozamiento entre el bloque y la mesa, debido a que ni el uno ni la otra son perfectamente lisos. De modo que, aunque podemos considerar el bloque como "libre" de acción exterior en la dirección vertical, no es ese el caso en la dirección horizontal debido a la existencia de la fuerza de rozamiento que no está compensada por ninguna otra fuerza horizontal. Si repetimos el experimento puliendo previamente la superficie de la mesa y la del bloque y utilizando un lubricante, notaremos que la velocidad disminuirá más lentamente que antes. Si apoyamos el cuerpo en un "colchón de aire" (esto es posible con una mesa o carril de aire) el cuerpo deslizará durante un tiempo considerable con una variación casi imperceptible en su velocidad. Podemos extrapolar estas experiencias a la de una superficie lisa ideal que no se oponga en absoluto al movimiento del bloque de modo que sobre dicha superficie la velocidad del mismo no variará. Así pues, si todo el rozamiento pudiera eliminarse, el bloque seguiría moviéndose indefinidamente en línea recta con celeridad constante. Esta fue la §6.4.- La ley de la inercia. 149 conclusión a la que llegó Galileo4. A la vista de estos resultados experimentales, Galileo afirmó: "Se requiere una cierta fuerza externa para cambiar la velocidad de un cuerpo; pero no se necesita fuerza externa alguna para conservar su velocidad." Dicho de otro modo, la materia presenta una cierta inercia u oposición a los cambios de movimiento. Así, para poner en movimiento el bloque de las experiencias anteriores debemos ejercer una fuerza sobre él, y lo mismo si luego lo queremos detener o si queremos modificar su velocidad. Por ejemplo, nuestra mano debe ejercer una fuerza sobre el bloque para ponerlo en movimiento y el plano áspero ejerce una fuerza sobre el bloque (la fuerza de rozamiento) que produce una reducción en su velocidad. Ambas fuerzas producen un cambio en la velocidad; esto es, una aceleración. Este principio de Galileo fue adoptado por Newton como la primera de sus tres leyes del movimiento, que ya hemos enunciado anteriormente. El significado de la primera ley, o ley de la inercia, consiste en que define por un procedimiento operacional lo que queremos decir cuando afirmamos que no existe fuerza neta o resultante actuando sobre un cuerpo, ya que podemos determinar si existe una fuerza externa neta actuando sobre un cuerpo mediante la observación del movimiento del mismo. Si la velocidad del cuerpo es constante (movimiento rectilíneo uniforme) sacamos la conclusión de que no existe fuerza externa resultante actuando sobre el cuerpo. Pero si la velocidad del cuerpo no permanece constante, porque esté cambiando su módulo (celeridad) o su dirección (movimiento curvilíneo) o ambas cosas a la vez, podemos asegurar que sobre el cuerpo está actuando una fuerza externa neta no nula. La primera ley de Newton contiene una definición cualitativa de la fuerza como agente capaz de modificar el estado de movimiento de los cuerpos; esto es, de producir aceleraciones. Veremos más adelante, en la próxima lección, que la segunda ley de Newton contiene una definición cuantitativa de la fuerza; lo que nos permitirá establecer un método operacional para la medida de las fuerzas. §6.5. Referenciales inercial y no-inercial.- La ley de la inercia es de fundamental importancia ya que determina la naturaleza de los sistemas de referencia o referenciales que debemos utilizar en el desarrollo de la Mecánica; es decir, las condiciones que deben cumplir tales referenciales para que en ellos sean válidas las conclusiones que saquemos de las leyes enunciadas. Recordemos, ante todo, que el movimiento es siempre relativo, de modo que la aceleración que pueda presentar un cuerpo depende del referencial en el que se mide. La primera ley del movimiento de Newton nos dice que si no hay objetos cercanos (y con ello entendemos que no hay fuerza, ya que toda fuerza debe estar asociada con algún cuerpo en la vecindad) entonces es posible encontrar una familia de referenciales en los que una partícula (partícula libre) no presenta aceleración; es 4 En realidad, Galileo experimentó no como hemos expuesto anteriormente sino con esferas y planos inclinados. 150 Lec. 6.- Principios de la Mecánica Clásica. La ley de la Inercia. decir, una familia de referenciales en los que la partícula libre se desplaza con movimiento rectilíneo uniforme, entre los que existe uno (que viaja con la partícula) en el que la partícula se encuentra en reposo. Tales referenciales reciben el nombre de inerciales. En los demás referenciales, i.e., en los referenciales no-inerciales, la partícula libre presentará una cierta aceleración, de modo que en tales referenciales no se cumple la ley de la inercia. Es obvio que los referenciales no-inerciales están acelerados con respecto a los referenciales inerciales. Para comprender mejor estos conceptos pondremos unos ejemplos. Consideremos un observador en reposo en un cierto referencial inercial S y un segundo observador en reposo en otro referencial S′ que se desplaza con una aceleración a0 con respecto al referencial S. Imaginemos, para fijar ideas, que el referencial S está ligado a tierra en tanto que el referencial S′ está ligado a un vagón de ferrocarril que se mueve por una vía recta y horizontal con movimiento uniformemente acelerado. Sobre la plataforma del vagón, que supondremos horizontal y perfectamente lisa a fin de que no aparezcan fuerzas de rozamiento, se coloca un bloque unido mediante un muelle dinamométrico a un punto fijo del vagón, como se muestra en la Figura 6.2. El dinamómetro permitirá a Figura 6.2 los observadores S y S′ apreciar una fuerza real F (el muelle del dinamómetro se alarga) que actúa sobre el bloque en el sentido de la aceleración a0. El observador S no se extrañará de la existencia de dicha fuerza, ya que con respecto a él el bloque está acelerado, con la misma aceleración a0 que posee el vagón (i.e., a≠0), de modo que, de acuerdo con la primera ley del movimiento, esa fuerza es necesaria para producir la aceleración del bloque. El observador S es un observador inercial y para él es válida la ley de la inercia. En cambio la situación es muy diferente para el observador S′. El observador S′ también puede apreciar la existencia de la misma fuerza F que actúa sobre el bloque, pero como éste se encuentra en reposo respecto al vagón tendrá que negar la validez de la primera ley del movimiento. El bloque permanecerá en reposo con respecto al observador S′ (i.e., a′=0) a pesar de que una fuerza externa neta no nula actúa sobre él. El observador S′ es un observador no-inercial. Liberemos ahora el bloque de modo que pueda moverse libremente y sin rozamiento sobre la plataforma del vagón (Figura 6.3). Cuando la velocidad de éste aumenta, esto es, cuando está sometido a una aceleración, el bloque se moverá sobre la plataforma con velocidad creciente (movimiento acelerado) en sentido contrario al de la aceleración del vagón, de forma tal que si el vagón se encontraba inicialmente en reposo respecto a la vía, el bloque permanecería en reposo con respecto al observador S (es como si el vagón se "deslizase" por debajo del bloque, sin arrastrarlo, ya que no existe rozamiento). §6.5.- Sistemas de referencia inercial y no inercial. 151 De nuevo, como en el experimento anterior, el observador S acepta la validez de la ley de la inercia; puesto que ninguna fuerza actúa sobre el bloque, éste permanece en reposo en el referencial inercial. También, de Figura 6.3 nuevo, el observador S′ rechaza la validez de la ley de la inercia, ya que el bloque presenta una aceleración a′ = -a0 en el referencial del vagón, pero no se puede detectar fuerza alguna actuando sobre él. El referencial S′, que está acelerado respecto al referencial inercial S, es un referencial no-inercial. A partir de estas sencillas experiencias sacamos como conclusión que la ley de inercia sólo se cumple cuando las observaciones se efectúan desde lo que hemos llamado un referencial inercial y que no se cumplen en los referenciales no-inerciales. Tales referenciales están acelerados con respecto a los referenciales inerciales. En los ejemplos anteriores hemos considerado un referencial ligado al vagón que se mueve con aceleración constante sobre una trayectoria rectilínea con respecto a tierra. Como ya sabemos, en el movimiento curvilíneo (del que es un caso particular el movimiento circular) siempre existe aceleración, de modo que si un referencial se encuentra en rotación con respecto a un referencial inercial, entonces ese referencial será no-inercial. Esto resulta claro a partir de nuestra experiencia cotidiana. Si nuestro referencial está inmóvil sobre un tiovivo no tendremos aceleración cero en dicho referencial en ausencia de fuerzas aplicadas. Únicamente podremos permanecer quietos sobre el tiovivo si ejercemos sobre nuestro propio cuerpo una cierta fuerza, dirigida hacia el eje de rotación, cuyo módulo viene dado por mω2r, siendo m nuestra masa, ω la velocidad angular y r la distancia que nos separa del eje de rotación. Así pues, la plataforma del tiovivo constituye un referencial no-inercial. Resumiendo, un referencial inercial es aquel con respecto al cual un cuerpo no presenta aceleración cuando no actúa ninguna fuerza sobre él. Todo referencial acelerado con respecto a un referencial inercial será no-inercial y en él no será válida la primera ley del movimiento de Newton. Es importante que observemos la necesidad de conocer todas las fuerzas que actúan sobre un cuerpo si queremos clasificar un determinado referencial como inercial o no-inercial. Podemos identificar las fuerzas posibles buscando el agente, esto es, otros cuerpos, responsable de cada una de ellas. Si observamos que en un cierto referencial un cuerpo presenta una cierta aceleración pero no somos capaces de encontrar el agente de la fuerza que suponemos produce esa aceleración, habremos de concluir que tal referencial no es inercial. §6.6. Buscando un referencial inercial.- La ley de la inercia afirma que un cuerpo no sometido a fuerza alguna tiene una velocidad constante y hemos visto que este enunciado sólo es válido en un referencial que definimos como inercial. Nuestro 152 Lec. 6.- Principios de la Mecánica Clásica. La ley de la Inercia. problema es hallar un referencial que tenga la propiedad de ser inercial. Pero, ¿es eso posible? El enunciado de la ley de la inercia puede parecernos ambiguo: ¿Cómo podemos saber si sobre un cuerpo actúa o no una fuerza? No podemos estar seguros de que sobre un cuerpo no actúen fuerzas sólo porque no existan otros cuerpos próximos a él, ya que las fuerzas pueden actuar sobre el cuerpo no sólo por contacto directo con otros cuerpos sino también mediante una acción a distancia. Este es el caso de las fuerzas gravitatorias y electromagnéticas que pueden ser importantes incluso para distancias considerables entre los cuerpos. Así pues, sólo podemos saber si actúa una fuerza sobre el cuerpo si medimos su aceleración; pero tal medida exige que hayamos establecido previamente un referencial y, además, que ese referencial sea inercial para poder aplicar la ley de la inercia. Pero, ¿cómo saber si dicho referencial es inercial? A poco que reflexionemos comprenderemos que nos encontramos en un circulo vicioso. Sin embargo, la situación no carece de esperanza porque sabemos que las fuerzas ejercidas entre dos cuerpos decrecen muy rápidamente cuando aumenta la distancia que los separa. Si no fuera así, sería imposible aislar un cuerpo de las interacciones debidas a los demás cuerpos del Universo. Todas las fuerzas conocidas entre las partículas decrecen con la distancia al menos de manera inversamente proporcional al cuadrado de la misma. En una descripción razonable, un cuerpo muy alejado de cualquier otro no estará prácticamente sometido a ninguna fuerza y por tanto su aceleración será nula. Una estrella típica está separada por unos 1016 m de su vecina más próxima, lo que supone sólo una pequeña aceleración. Por consiguiente, podemos esperar que las estrellas "fijas" definan un referencial no acelerado, esto es, un referencial inercial, dentro de una buena aproximación. Ciertamente, para muchos problemas prácticos, resulta mucho más útil considerar un referencial sujeto a la superficie de la Tierra. Tal referencial recibe el nombre de referencial o Sistema del Laboratorio (S.L.). En la mayoría de los casos este referencial es una aproximación suficientemente buena de un referencial inercial, aunque no lo es en sentido estricto. En efecto, debido a la rotación diaria de la Tierra, el Sistema del Laboratorio presenta una aceleración dirigida hacia el eje de rotación que es pequeña pero no despreciable en todos los casos. Un punto en reposo en el Ecuador experimenta una aceleración centrípeta dada por a v2 RT ω 2 RT [6.3] siendo ω=2π/T la velocidad angular de la Tierra y RT el radio de la misma. Como el periodo de revolución es T ≈86 160 s (i.e., un día sidéreo, vide Problema 6.1) la velocidad angular es Figura 6.4 ω ≈ 2π 86 160 7.29 × 10 5 rad/s [6.4] §6.6.- Buscando un sistema de referencia inercial. 153 y como RT≈ 6 400 km, la aceleración resulta ser a ≈ (7.29 × 10 5)2 × 6.4 × 106 0.034 m/s 2 [6.5] Este valor explica parte del exceso observado en el valor de la aceleración gravitatoria aparente en el Polo sobre la del Ecuador. La aceleración gravitatoria medida en el Polo es de 9.832 m/s2 y la medida en el Ecuador es de 9.780 m/s2, lo que representa una diferencia de 0.052 m/s2. El resto de la variación apreciable en el valor de la aceleración gravitatoria se debe principalmente a la forma del geoide, que corresponde a la de un esferoide achatado por los polos, de modo que, aún en la ausencia del efecto de la rotación terrestre, el valor de la aceleración gravitatoria es mayor en los Polos que en el Ecuador. Así pues, el referencial del laboratorio está acelerado y no constituye un referencial inercial. Una mejor aproximación a lo que es un referencial inercial nos la proporciona un referencial cuyo origen está fijo en el centro de la Tierra, que se traslada con ésta en su órbita alrededor del Sol y que mantiene fijas las direcciones de sus ejes con respecto a las estrellas lejanas, de modo que no participa del movimiento de rotación de la Tierra alrededor de su eje polar. Tal referencial recibe el nombre de sistema geocéntrico. La aceleración de la Tierra en su órbita resulta ser un orden de magnitud menor que la aceleración debida a la rotación terrestre. Como 1 año ≈ 3.15×107s, la velocidad angular de la Tierra alrededor del Sol es ω ≈ 2π 3.15 × 107 1.995 × 10 7 rad/s [6.6] y como el radio de la órbita terrestre es R ≈ 150 × 106 km, la aceleración de la Tierra en su órbita resulta ser a ≈ (2 × 10 7 )2 × 150 × 109 0.006 m/s 2 [6.7] de modo que el sistema geocéntrico también presenta una cierta aceleración, aunque pequeña, y no constituye un referencial inercial. Es obvio que conseguiremos una gran mejora si adoptamos un referencial cuyo origen esté cerca del centro del Sol (en el centro de masas del Sistema Solar) y cuyos ejes no giran con respecto a las estrellas lejanas. Llamaremos sistema heliocéntrico a un tal referencial. Pero el Sistema Solar participa en el movimiento de rotación de la Galaxia de modo que el sistema heliocéntrico presenta también una determinada aceleración. La Galaxia (formada por unas 1010 estrellas) presenta una estructura de disco con brazos espirales; en el centro de uno de ellos y hacia el borde de la Galaxia se encuentra el Sistema Solar (Figura 6.5). La aceleración del Sol hacia el centro de la Galaxia no se conoce experimentalmente; pero, a partir de los estudios realizados sobre los corrimientos por efecto Doppler de las líneas espectrales, se estima que la velocidad del Sol respecto al centro de la Galaxia es de 300 km/s. Si el Sol describe una órbita circular alrededor del centro de la Galaxia, que se encuentra a una distancia aproximada de 3×1020 m del Sol (lo que representa un periodo de 2×108 años = 6.3×1015 s), entonces la aceleración de éste con respecto al centro de la Galaxia es 154 Lec. 6.- Principios de la Mecánica Clásica. La ley de la Inercia. a ω2 R v2 9×1010 ≈ R 3×1020 3 × 10 10 m/s 2 [6.8] que es una aceleración muy pequeña, de modo que el sistema heliocéntrico es satisfactorio para describir la gran mayoría de los fenómenos. Sin embargo, con todo rigor sería necesario escoger un nuevo referencial con origen en el centro de nuestra Galaxia y que probablemente sería inercial. Este Figura 6.5 sería el sistema galáctico. Pero incluso las mismas galaxias no están completamente distribuidas al azar sino que tienen una marcada tendencia a formar racimos. Nuestra Galaxia pertenece a un grupo de unos 19 miembros conocido como Grupo Local, que forma un sistema físico ligado gravitatoriamente. Nuestra Galaxia experimenta una aceleración con respecto al centro de masas del Grupo Local. Aparentemente no existe ningún sistema físico sencillo que nos pueda servir como referencial inercial. Sin embargo, puede tomarse el sistema heliocéntrico como inercial para los efectos prácticos de los problemas de la Mecánica dentro del Sistema Solar. Incluso el referencial del laboratorio constituye una aproximación suficiente para un gran número de problemas, como ya descubrió Galileo y como se utiliza hoy día en numerosas aplicaciones científicas y de ingeniería. De todos modos es muy interesante, al menos desde un punto de vista puramente formal, definir un patrón de referencial inercial. Es un convenio establecido considerar las estrellas llamadas "fijas" como un referencial inercial patrón. Este modo de hablar es algo metafísico, ya que asegurar que las estrellas fijas no están aceleradas rebasa nuestro conocimiento experimental actual. Es imposible que nuestros instrumentos puedan detectar una aceleración de una estrella lejana, o grupo de estrellas, menor que 10-6 m/s2, aun cuando se realizaran rigurosas medidas durante un centenar de años. Con fines prácticos es conveniente referir a las estrellas fijas las direcciones en el espacio. §6.7. Transformación de Galileo.- La ley de la inercia establece la equivalencia de todos los referenciales inerciales, es decir de aquellos marcos en los que la partícula libre no presenta aceleración. Puesto que esos marcos se mueven unos con respecto a otros con velocidad constante, los distintos observadores ligados a cada uno de esos referenciales describirán de distinto modo el movimiento de un cuerpo y estamos interesados en encontrar unas ecuaciones que nos permitan comparar esas distintas descripciones. Tales ecuaciones son las llamadas ecuaciones de transformación de Galileo. 155 §6.7.- Transformación de Galileo. Consideremos dos referenciales S y S′ que se mueven, uno con respecto a otro, con movimiento relativo de traslación uniforme (sin rotación) de modo que el observador O ve al observador O′ moviéndose con una velocidad v0 mientras que el observador O′ ve al O moviéndose con una velocidad -v0. Por ejemplo, el observador O puede encontrarse en el andén de una estación de ferrocarril y el O′ puede estar situado en un tren que se desplaza sobre una vía recta con velocidad constante. Ambos observadores darán distintas descripciones del movimiento de un automóvil que circula por una carretera próxima. Por simplicidad, escogeremos los sistemas de ejes coordenados xyz y x′y′z′ de modo que los ejes x y x′ estén situados a lo largo de la línea del movimiento relativo (Figura 6.6 y que los ejes yz e y′z′ sean respectivaFigura 6.6 mente paralelos entre sí. Los ejes coordenados permanecerán siempre paralelos debido a la ausencia de rotación relativa. También supondremos que en el instante inicial, t=0, los orígenes de ambos referenciales coinciden, de modo que al ser constante la velocidad relativa se puede escribir OO [6.9] v0 t Consideremos ahora una partícula P y sean r=OP y r′ = O′P los vectores de posición de dicha partícula con respecto a los orígenes O y O′ de sendos referenciales. Estos vectores de posición están relacionados en la forma r r [6.10] v0 t Esta ecuación vectorial da lugar a tres ecuaciones escalares que, tomando en consideración el hecho de que v0 es paralela a x, podemos escribir x x v0 t y y z z t t [6.11] donde hemos añadido t=t′ a las tres ecuaciones espaciales para hacer énfasis en que estamos suponiendo que ambos observadores están utilizando la misma escala de tiempos; esto es, suponemos que las mediciones del tiempo son independientes del movimiento del observador. Aunque esto nos parece razonable (al menos fue razonable hasta el año 1905) no deja de ser una suposición que debe ser confirmada (y desvirtuada) por la experiencia. Por ahora la aceptamos como válida (hasta que abordemos el estudio de la Mecánica Relativista). El conjunto de las ecuaciones [6.11], o la simple ecuación vectorial [6.10] combinada con t=t′, constituyen las ecuaciones de transformación de Galileo que nos 156 Lec. 6.- Principios de la Mecánica Clásica. La ley de la Inercia. permiten relacionar las coordenadas de una partícula en dos referenciales en movimiento relativo de traslación uniforme. Las velocidades v y v′ de la particular P en los referenciales S y S′ se definen respectivamente, por v dr dt v dr dt [6.12] Obsérvese que no escribimos dr′/dt′ debido a que hemos supuesto que t=t′, de modo que d/dt′ es lo mismo que d/dt. Derivando la ec. [6.10] con respecto al tiempo y teniendo en cuenta que v0 es constante, tenemos v v [6.13] v0 que es la ley de adición de velocidades, que proporciona la regla galileana para comparar la velocidad de la partícula medida por dos observadores en movimiento relativo. Las aceleraciones de la partícula P en los referenciales S y S′ son a dv dt a dv dt [6.14] respectivamente, donde de nuevo hemos hecho uso de la igualdad t=t′. Derivando la ec. [6.13] con respecto al tiempo y teniendo en cuenta que dv0/dt=0, por ser v0=cte, tenemos a a [6.15] de modo que ambos observadores miden la misma aceleración. Esto es, la aceleración de una partícula es la misma para todos los observadores en movimiento relativo de traslación uniforme. Este resultado nos ofrece un ejemplo de una magnitud física, la aceleración de una partícula, que parece ser independiente del movimiento del observador; dicho de otro modo, hemos encontrado que la aceleración permanece invariante cuando se pasa de un referencial a otro que se encuentra en movimiento relativo de traslación uniforme. Es la primera vez que encontramos una magnitud física (la aceleración) que permanece invariante bajo una transformación (la de Galileo). Más adelante encontraremos otras magnitudes físicas que se comportan de la misma manera. Este resultado tiene una profunda influencia en la formulación de las leyes de la Física. §6.8. Principio de Relatividad de Galileo.- Como en el artículo anterior, consideremos de nuevo dos referenciales en movimiento relativo de traslación uniforme: uno de ellos, el S por ejemplo, lo podemos suponer en reposo, en tanto que el otro se encuentra en movimiento; pero igualmente podemos adoptar el criterio opuesto. En general, nos podemos plantear la siguiente pregunta: ¿Existe algún procedimiento que nos permita decidir qué referencial está realmente en reposo y cuál de ellos está en movimiento? Es decir, ¿tiene algún significado la velocidad absoluta? 157 §6.8.- Principio de Relatividad de Galileo. De acuerdo con todos los experimentos realizados hasta ahora la respuesta es negativa. Esto es, no existe ningún procedimiento que nos pueda servir para detectar el movimiento absoluto: El movimiento es siempre relativo. Este principio de relatividad ya fue estudiado en el siglo XIV, pero sólo llegó a ser bien conocido a partir de los trabajos de Galileo en el siglo XVI. Es interesante leer las notas de Galileo sobre la imposibilidad de observar el movimiento absoluto: "Encerrémosnos con algún amigo en la cabina principal bajo cubierta de un barco grande y con nosotros encerremos algunas moscas, mariposas, y otros pequeños animales voladores. También tengamos una vasija grande de agua con algún pez en su interior; colguemos una botella que se está vaciando gota a gota dentro de un recipiente grande debajo de la misma. Cuando el barco está detenido, se observa cuidadosamente que estos pequeños animales vuelan con velocidad igual por todas partes de la cabina; el pez nada indiferentemente en todas direcciones; las gotas caen dentro del recipiente que está debajo de la botella; y si se lanza algún objeto hacia nuestro amigo, no es necesario lanzarlo con más fuerza en una dirección que en otra, siendo iguales las distancias; si se salta con los dos pies juntos, se recorren espacios iguales en todas direcciones. Una vez observadas todas estas cosas cuidadosamente (aunque no existe ninguna duda de que cuando el barco está quieto todo debe ocurrir de este modo), veamos lo que ocurre cuando el barco se mueve con una velocidad cualquiera, de modo que el movimiento resulte uniforme y no fluctuando de un lado para otro. No se descubrirá la menor variación en todos los efectos mencionadas, ni podremos decir a partir de cualquiera de ellos si el barco se está moviendo o está quieto. Al saltar se recorren sobre el suelo los mismos espacios que antes, y no se harán saltos mayores hacia popa que hacia la proa, aunque el barco se mueva con mucha rapidez, a pesar del hecho de que durante el tiempo en que se está en el aire el suelo bajo nosotros se está moviendo en una dirección opuesta a la del salto. Al arrojar un objeto a nuestro compañero, no se necesita más fuerza para alcanzarle, aunque él esté en dirección de la proa o de la popa, estando nosotros situados en el lado opuesto. Las gotitas caerán, como antes, dentro del recipiente que está debajo de la botella sin caer hacia la popa, a pesar de que cuando las gotitas están en el aire el barco recorre cierta distancia hacia adelante. El pez dentro del agua nadará hacia la parte delantera de sus vasija con el mismo esfuerzo que hacia la parte trasera y se moverá con igual facilidad hacia el cebo que coloquemos Figura 6.7 en cualquier punto a lo largo de los bordes de la vasija. Finalmente, las mariposas y las moscas continuarán sus vuelos indiferentemente hacia todos los lados, y no ocurrirá nunca que se concentren hacia popa como si estuviesen cansadas de luchar contra la marcha del barco, del cual están separadas durante largos intervalos de tiempo manteniéndose en el aire con sus alas. Y si se hace humo quemando algo de incienso, se verá que asciende hacia arriba en forma de nubecillas que permanecen estacionarias y sin moverse de un lado hacia otro." Galileo Galilei: Diálogo respecto a los dos sistemas cosmogónicos principales - Ptoloméico y Coperniaco. Vemos como Galileo comprendió que las leyes a que obedecen los fenómenos físicos deben ser las mismas para un observador en reposo y para otro observador que presenta un movimiento relativo de traslación uniforme, de modo que no se puede disponer de ningún procedimiento que nos permita saber si nos encontramos 158 Lec. 6.- Principios de la Mecánica Clásica. La ley de la Inercia. o no en movimiento. Este principio de relatividad se puede enunciar del modo siguiente: Las leyes básicas de la Física son idénticas en todos los referenciales que se mueven con movimiento uniforme (velocidad constante) unos con respecto a otros. De acuerdo con este principio, un observador encerrado en un vagón de ferrocarril sin ventanas, viajando con velocidad constante sobre una vía recta a nivel, sin vibraciones, no podrá servirse de ningún experimento para averiguar si se encuentra o no en movimiento, pues cualquier experimento que realice dentro del vagón en marcha dará el mismo resultado que cuando lo realiza con el vagón parado. Únicamente mirando a través de una ventana puede saber si se encuentra en movimiento, pero incluso entonces no puede decidir si es el vagón el que se mueve o si, por el contrario, es todo lo que ve a través de la ventana (incluido el paisaje) lo que se mueve en sentido opuesto. El principio de Relatividad de Galileo (o de invarianza galileana, como también se le conoce) fue uno de los primeros en ser introducidos en la Física. Era básico para la visión que Newton tenía del Universo y ha sobrevivido después de numerosos experimentos. Se pensaba que una medida cuidadosa de la velocidad de la luz con respecto a la Tierra revelaría la presencia del movimiento absoluto de ésta a través del espacio. Esta observación debería contradecir al principio de relatividad que no era aún aceptado como ley fundamental de la Naturaleza. Sin embargo, los cuidadosos experimentos realizados por MICHELSON y MORLEY, en los años 1881 a 1887, dieron un resultado nulo para la velocidad absoluta de la Tierra; i.e., no pudieron detectar el movimiento de la Tierra midiendo la velocidad de la luz en distintas direcciones. El principio de relatividad fue enunciado de nuevo, en los comienzos del siglo XX, por POINCARÈ (1854-1912) y EINSTEIN (1879-1955): El movimiento uniforme absoluto no puede detectarse mediante ningún experimento. El principio de Relatividad de Galileo está totalmente de acuerdo con la Teoría de la Relatividad Especial. ¿Qué uso podemos hacer de este principio? La hipótesis de que la velocidad absoluta no tiene significado en la Física restringe en parte la forma y contenido de las leyes físicas, tanto las conocidas como las aún por descubrir. Para dos observadores que se muevan sin aceleración relativa las leyes de la Física han de ser las mismas. Si ambos observadores estudian un mismo fenómeno, cada uno dará una distinta descripción del mismo. A partir de las leyes físicas podemos predecir como serán las observaciones del primer observador, a partir de esas observaciones podemos averiguar cuáles serán las observaciones del segundo observador y, a partir de ellas, establecer las leyes de la Física que rigen el fenómeno estudiado por el segundo observador. Estas leyes son las mismas que las del primer observador. Si combinamos el principio de relatividad con la definición de la transformación galileana llegaremos a la siguiente conclusión: Las leyes básicas de la Física tienen la misma forma en dos referenciales ligados por una transformación galileana. §6.8.- Principio de Relatividad de Galileo. 159 Este enunciado es algo más restrictivo que el dado anteriormente acerca de que las leyes de la Física son idénticas en todos los referenciales que se mueven con velocidad constante unos con respecto a otros. Este segundo enunciado incluye, por ejemplo, la hipótesis de que t=t′, que es una hipótesis que, como veremos más adelante, deberá ser abandonada. El principio de relatividad siempre es válido, pero la transformación correcta no es la de Galileo, sino la de LORENTZ (1853-1928). En efecto, la transformación de Galileo no deja invariantes todas las leyes de la Física. En el Electromagnetismo existen unas leyes, las de MAXWELL, sólidamente establecidas, que rigen los fenómenos electromagnéticos con el mismo carácter fundamental con que la Segunda Ley de Newton rige los fenómenos mecánicos. Resulta que las leyes de Maxwell no son invariantes por la transformación de Galileo, sino que lo son por la de Lorentz. La transformación de Lorentz, que se encuentra en la base de la teoría de la Relatividad Especial, respeta las leyes de Maxwell y las de Newton convenientemente modificadas de modo que los principios newtonianos constituyen aproximaciones válidas para velocidades muy inferiores a la de la luz. La teoría de la Relatividad Especial modifica, asimismo, el carácter absoluto del espacio y del tiempo, carácter absoluto que es fundamental en la Mecánica Clásica o Newtoniana. Problemas 6.1.- Día solar y día sidéreo.- El día solar corresponde al intervalo de tiempo que emplea el Sol en pasar dos veces sucesivas por un mismo meridiano terrestre. El día solar medio es de 86 400 segundos (= 24 horas). El día sidéreo corresponde al intervalo de tiempo que emplea la Tierra en completar una revolución alrededor de su eje polar. Calcular la duración del día sidéreo. 6.2.- Un péndulo cuelga del techo de un autobús. Describir y explicar, al menos cualitativamente, el comportamiento de dicho péndulo en cada una de las situaciones siguientes: a) El autobús se mueve en una trayectoria rectilínea con celeridad constante; b) el autobús acelera; c) el autobús frena; d) el autobús toma una curva. 6.3.- Un tren circula con una velocidad de 108 km/h. Sobre el piso de uno de los vagones rueda una bola con una velocidad de 15 m/s dirigida a) en la dirección del movimiento del tren, b) en dirección opuesta y c) en dirección perpendicular a la del tren. Encontrar, en cada uno de los casos anteriores, la velocidad de la bola con respecto a tierra. 6.4.- La cinta transportadora de viajeros de un aeropuerto tiene una longitud de 100 m y avanza con una velocidad de 1.2 m/s. Una persona se mueve sobre la cinta con una velocidad relativa a ella de 1.5 m/s. Determinar el tiempo que estará la persona sobre la cinta cuando: a) camina en dirección del movimiento de la cinta y b) cuando camina en sentido opuesto. 6.5.- Escaleras mecánicas.- Una persona sube por una escalera mecánica, que se encuentra parada, en 8.2 s. Cuando la escalera está en funcionamiento, puede subir a la persona en 5.0 s. ¿Cuánto tiempo emplearía la persona en subir caminando por la escalera en movimiento? 6.6.- Un automóvil viaja con una velocidad de 54 km/h bajo la lluvia que cae verticalmente. Los pasajeros del automóvil observan que las gotas de lluvia dejan trazas en las ventanas 160 Lec. 6.- Principios de la Mecánica Clásica. La ley de la Inercia. laterales formando un ángulo de 50° con la vertical. Calcular la velocidad de las gotas de lluvia con respecto al automóvil y con respecto a la tierra. 6.7.- El movimiento plano de una partícula viene descrito en un cierto referencial por las ecuaciones: x = 8t, y = 6t - t2. a) Escribir las ecuaciones que describen el movimiento de la partícula en un segundo referencial que se mueve con una velocidad constante v0=8i respecto del primero y que coincide con él en el instante t=0. b) Calcular la velocidad y la aceleración de la partícula respecto de ambos referenciales. 6.8.- Trayectorias de colisión.- Dos barcos se aproximan entre sí sobre trayectorias que se interceptan y con velocidades que conducen a una colisión. Examinar la situación desde un referencial fijo en uno de los barcos. Explicar cómo los observadores situados en cualquiera de los barcos pueden advertir el peligro de colisión por medio de mediciones sucesivas de la dirección en que ven al otro barco. 6.9.- Demostrar que la distancia entre dos puntos del espacio permanece invariante en una transformación de Galileo. 6.10.- Dos referenciales no-inerciales, S′ y S″, coinciden en el instante t=0 con un referencial inercial S. Inicialmente el referencial S′ se encuentra en reposo en tanto que el referencial S″ tiene una velocidad v0 a lo largo del eje x. A partir del instante t=0 ambos referenciales S′ y S″ experimentan una misma aceleración constante a0 a lo largo del eje x. a) ¿Cuáles serán las posiciones de O′ y O″ respecto a O en función del tiempo? b) Relacionar las posiciones x′ y x″ de una partícula en S′ y S″ con la posición x en S. c) Relacionar las velocidades v′ y v″ de una partícula en S′ y S″ con la velocidad v de esa partícula en S. d) Ídem para las aceleraciones de la partícula. e) Supóngase que la partícula se mueve en la dirección del eje x de modo que x = a0t2/2, ¿cómo quedará descrito el movimiento de la partícula al estudiarlo desde los referenciales S′ y S″? 6.11.- ¿Invariancia de las leyes del electromagnetismo?.- En un referencial inercial, dos protones se mueven sobre trayectorias paralelas y con una misma velocidad. Sea S′ un referencial que viaja con los protones, de modo que éstos se encuentran en reposo en dicho referencial. a) Expresar la fuerza eléctrica que se ejerce entre los dos protones en el referencial S y en el S′. b) Mostrar que en el referencial S existen dos fuerzas, una elec- trostática y otra magnética, y calcular su suma. c) ¿Cómo es que siendo inerciales los referenciales S y S′ las fuerzas son distintas en ambos referenciales?