Refractarios.Leccion2.Propiedades.de.los.REFRACTARIOS
Anuncio

LECCION 2.- PROPIEDADES DE LOS MATERIALES REFRACTARIOS.
1.-Introducción.
Para poder seleccionar el tipo o tipos de materiales refractarios (REVESTIMIENTO REFRACTARIO)
más adecuado para cada caso concreto (Proceso, horno, etc), es necesario conocer con la mayor
exactitud posible, por una parte, las características o propiedades de los materiales refractarios y por
otra las solicitaciones y las condiciones de trabajo a que va estar sometido en servicio. Un refractario
de una chimenea puede llegar a estar sometido a la acción química producida por el H2 SO4 , por lo
tanto tendremos que evaluar su comportamiento ante dicha acción.
Normalmente, será muy difícil que un solo material refractario reúna todos los requisitos exigidos
(Valor ideal de todas las características o propiedades), por lo que se tendrá que ajustar la selección a
los conceptos de mayor relevancia o importancia para su utilización y elegirlo con arreglo a los
mismos. También puede recurrirse a la utilización de varios tipos de materiales refractarios
simultáneamente.
Las propiedades del material refractario ideal son las siguientes:
1.-Alta refractariedad.
2.- Estabilidad volumétrica a las temperaturas de operación.
3.- Estabilidad química (frente a gases, vapores y escorias).
4.- Resistencia al choque térmico.
5.- Alta resistencia mecánica en caliente.
6.- Alta densidad.
7.- Baja conductividad térmica.
8.- Alta resistencia a la abrasión.
9.- Baja conductividad eléctrica a altas temperaturas
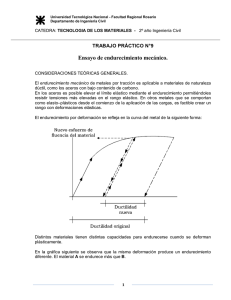
Dado que algunas de las propiedades que debe cumplir el refractario ideal son contrapuestas, hay
que llegar, generalmente, a una solución de compromiso.
Las propiedades de un refractario aislante ideal:
1.2.3.4.5.-
Muy baja conductividad térmica.
Alta refractariedad.
Buena resistencia al ataque químico de gases, vapores y escorias.
Buenas propiedades mecánicas en caliente.
Baja densidad.
Es cierto que la única manera de saber si un material es adecuado para una determinada aplicación,
sería realizar los ensayos de los materiales refractarios en las mismas condiciones a las que está
expuesto en la realidad y observar los resultados que se obtienen. A escala de laboratorio es imposible
reproducir exactamente las condiciones y el nivel de solicitaciones que van a actuar sobre el material
refractario durante su servicio industrial, a pesar de esto podremos determinar, en el laboratorio, una
serie de características y propiedades (Estructurales y operativas), que nos pueden ayudar a contestar
la siguiente pregunta:
¿Cual será el comportamiento más probable del material refractario durante el servicio?.
Todos los factores que afectan a la duración del revestimiento refractario de un horno de pueden
dividir en tres grandes grupos:
1.- QUIMICO
2.- TERMICO
3.- MECANICO
que representan los esfuerzos y las acciones a las que van a estar sometidos los materiales refractarios.
1
En el cuadro 1.1 se da una relación de los esfuerzos y las acciones encuadradas en cada uno de los tres
grupos anteriores.
Cuadro 1.1.- Causas de desgaste.
FACTORES QUIMICOS:
Q1.Q2.Q3.Q4.Q5.Q6.-
Atmósfera del horno.
Combustible.
Productos de combustión.
Materiales reaccionantes.
Productos resultantes de la reacción (Escorias, metales fundidos, etc)
Eventual influencia de la humedad ambiental o por vapor de agua.
FACTORES TERMICOS:
T1.- Tipo de horno.
T2.- Tamaño del horno.
T3.- Calentamiento multi o unilateral.
T4.- Distribución de temperaturas en el horno.
T5.-Energía por unidad de tiempo.
T6.-Gradiente o temperatura en el revestimiento.
T7.- Acumulación de calor en las paredes.
T8.- Trabajo continuo o discontinuo del horno.
FACTORES MECANICOS:
M1.M2.M3.M4.M5.M6.-
Horno fijo o móvil.
Características físicas de los productos reaccionantes.
Movimiento de los productos reaccionantes.
Velocidad de los gases de combustión.
Atmósfera pulverulenta.
Influencias mecánicas exteriores, Por ejemplo, forma de la carga y descarga, vibraciones,
deformaciones de la coraza, etc.
Los condicionantes anteriores no se deben considerar individualmente a la hora de elegir el material
refractario, pues, normalmente, actúan de forma conjunta como causa de desgaste. Así, por ejemplo
una subida de la temperatura en el horno no sólo significa una mayor carga térmica en el ladrillo, sino
una mayor infiltración de productos fundidos (Escorias, metales,....), que dan lugar a un posible ataque
y en todo caso a una mayor densificación del ladrillo con la consiguiente disminución de su
elasticidad, que lo hace más sensible a esfuerzos mecánicos variables.
Dado que los factores anteriores no influyen por igual en todas las partes del horno, se debe hacer un
estudio por zonas e identificar en cada una de ellas las causas principales de desgaste o deterioro, para
así elegir los tipos y las calidades de materiales refractarios más adecuados en cada caso y conseguir
curvas de desgaste homogéneas.
2.-Clasificación de las propiedades de los materiales refractarios.
A la vista de las solicitaciones y condiciones de trabajo se puede hacer también una división o
clasificación de las características y propiedades principales de los materiales refractarios, que hay que
tener en cuenta a la hora de la elección. Así, por ejemplo, un material refractario que esta situado en
una zona donde la temperatura puede cambiar bruscamente, hay que tener en cuenta a la hora de su
elección que ha de tener una buena resistencia al choque térmico.
2
Los factores que determinan el comportamiento de un material refractario (Como de cualquier
material) son por un lado su composición química y por otro una serie de características físicas. Todos
estos factores son, lógicamente, consecuencia de las materias primas utilizadas y del proceso de
fabricación (distribución granulométrica de las materias primas, presión de conformación, temperatura
de cocción, etc).
En el cuadro 2.1 se mencionan las principales características y propiedades que definen el
comportamiento de un material refractario, las cuales de pueden relacionar con las solicitaciones y
acciones en servicio de los hornos industriales.
Cuadro 2.1.- características y propiedades de los materiales refractarios.
A.- CARACTERISTICAS ESTRUCTURALES:
E1.E2.E3.E4.E5.-
Composición química.
Composición mineralógica. Grado de vitrificación.
Tamaño de los cristales.
Porosidad y densidad. Tamaño y tipo de poros.
Permeabilidad (Al aire, gases o vapores).
B.- CARACTERISTICAS OPERATIVAS:
B1.- MECANICAS:
OM1.- Resistencia a la compresión en frío.
OM2.- Resistencia a la flexión en frío. Módulo de deformación.
OM3.- Resistencia al desgaste.
OM4.-Resistencia a la abrasión.
B2.- MECANICO -TERMICAS:
OMT1.- Refractariedad bajo carga (Ta), reblandecimiento bajo carga a temperatura creciente.
OMT2.- Fluencia bajo presión (Reblandecimiento bajo carga a temperatura constante, durante un largo
período de tiempo).
OMT3.- Resistencia a la flexión en caliente (MOR).
B3.- TERMICAS:
OT1.OT2.OT3.OT4.OT4.OT5.-
Refractariedad (Resistencia piroscópica, CPE).
Dilatación térmica.
Modificación permanente de la longitud (Deformación permanente).
Conductividad térmica.
Calor especifico.
Resistencia al choque térmico.
B4.- QUIMICAS:
OQ1.- Resistencia a escorias, metales fundidos.
OQ2.-Resistencia a gases y vapores.
OQ3.- Resistencia a los ácidos.
OQ4.- Resistencia a la hidratación.
3
La determinación de las características y propiedades mencionadas se lleva a cabo mediante una serie
de ensayos normalizados. En la mayoría de ellos muestras de material, denominadas probetas, se
someten a diversas solicitaciones y acciones.
Dentro de las propiedades las hay fundamentales y simuladas. Se dice que una propiedad es
fundamental cuando es intrínseca al material (Propiedad físico-química del mismo), por ejemplo:
composición química, densidad real, conductividad térmica, etc. Por su parte, una propiedad es
simulada cuando para su determinación se simula en el laboratorio un ensayo que sea lo más semejante
posible a la correspondiente condición o solicitación en el horno (Material refractario en servicio), por
ejemplo: resistencia al ataque por escorias, choque térmico, refractariedad bajo carga, etc.
La caracterización de un material refractario es total cuando a partir de un número mínimo de datos
acerca de sus propiedades fundamentales y simuladas se puede precisar cual será su comportamiento
en servicio. El estudio de las diferentes propiedades, a pesar de sus limitaciones (se simulan
condiciones), es un medio adecuado, tanto para el fabricante como para el usuario, para controlar la
calidad de los materiales refractarios.
En la tabla 2.1 se dan las características de los principales tipos de materiales refractarios
Tabla 2.1.- características de los principales tipos de materiales refractarios
Como norma general el usuario debe elegir entre las soluciones presentadas por los fabricantes, que
están basadas no sólo en el conocimiento del refractario, sino también en las experiencias acumuladas
de otras instalaciones. De todas formas, normalmente, solo se logra la máxima rentabilidad del
refractario con una estrecha colaboración entre el usuario y el fabricante mediante la realización de
4
pruebas de distintas calidades. A continuación vamos a pasar a comentar las características
estructurales y operativas más importantes.
3.- Características o propiedades estructurales.
3.1.- Composición química.
La composición química de un material refractario sirve para hacer su clasificación y determinar su
carácter químico, siendo de gran importancia para decir cual será su resistencia a los ataques por
escorias, vidrio fundido, gases y vapores, etc.
Además de las reacciones químicas de los materiales refractarios con las sustancias existentes en la
atmósfera del horno o con los materiales a procesar y sus productos de reacción (Escorias, metales
fundidos, vidrio, etc.), se producen reacciones en el contacto de ladrillos refractarios de distinta
composición, en una pared de un horno trabajando a temperaturas altas. Se deberán tener
especialmente en cuenta a temperaturas de utilización de hornos por encima de 1600 °C, si no se
quieren sorpresas desagradables.
Según el comportamiento obtenido frente a reacciones de contacto, los ladrillos refractarios se pueden
clasificar en tres grupos (Tabla 3.1.1).
Tabla 3.1.1.- Clasificación de los ladrillos refractarios frente a reacciones de contacto.
Los ladrillos de cada grupo montados entre sí pueden soportar una temperatura de 1600 °C y más sin
que se lleguen a producir reacciones de contacto significativas. Sin embargo, es imposible cargar a
altas temperaturas ladrillos del grupo ácido con los del básico sin que se produzcan destrucciones por
reacciones de contacto.
Los ladrillos indicados en primer lugar de los tres grupos caracterizan el comportamiento químico del
grupo, mientras que los indicados en último lugar tienen carácter de transición y muestran en su
comportamiento químico determinadas desviaciones.
Los ladrillos del grupo indiferente pueden calentarse a 1600 °C tanto en contacto con ladrillos del
grupo ácido como del grupo básico. Además de los ladrillos de carbono, se asocian a este grupo los
ladrillos de alta alúmina con un contenido en Al2 O3 de 72 a 100 %. Como se puede comprobar en el
diagrama de fases del sistema Al 2 O3 —SiO2 hay solamente fases fijas en el sistema exclusivo hasta
1.840 °C., siendo los minerales de corindón y mullita los que resisten. Es a partir de 1840 °C cuando
5
se produce una fase de fusión de mullita, mientras que el corindón resiste hasta alcanzar una
temperatura aproximada de 2000 °C. Estas fases fijas son las que determinan el carácter químico
pasivo de los ladrillos de corindón en contacto con ladrillos refractarios ácidos y básicos, siempre que
no se acelere la reacción por escorias líquidas o gases agresivos.
La gran familia de ladrillos de chamota desaparece por completo de estas consideraciones, ya que su
límite de utilización se sitúa muy por debajo de los 1600 °C.
Para determinar el análisis químico de los materiales refractarios, y de las materias primas para
fabricarlos, se utilizan, normalmente, métodos y técnicas instrumentales relacionadas con la Química
Analítica, como son la espectrofotometría de absorción atómica (AA) y la fluorescencia de Rayos X
(FRX), que nos dan el análisis químico con relativa rapidez.
El análisis químico, en este caso correspondiente a un material refractario sílico-aluminoso, se
presenta del siguiente modo:
SiO2
Al 2 O3
Fe2 O3
CaO+MgO
Na2 O+K2 O
P.F.
62.0 %
33.0 %
2.5 %
1.0 %
1.5 %
A la vista de él puede señalarse que este tipo de análisis (Elemental) no nos proporciona ningún tipo
de información acerca de las especies mineralógicas presentes en el material refractario analizado. Así
por ejemplo, se desconoce que parte del 62 % de SiO2 se encuentra libre ni que parte estará combinada
con el Al 2 O3 en forma de silicatos.
Sin embargo, el análisis químico nos da las cantidades, en nuestro caso, de: óxido de hierro, alcalinos
y alcalino-térreos y nos permite compararlas con las cantidades máximas fijadas por la Norma UNE
correspondiente. Tales óxidos se incorporan al constituyente matriz y puede analizarse el efecto que
tienen sobre la refractariedad del material.
3.2.- Composición mineralógica. Grado de vitrificación.
El comportamiento de los ladrillos refractarios de una misma composición química depende de las
materias primas utilizadas y de las reacciones que se hayan producido durante el proceso de cocción,
es decir de los compuestos finalmente presentes en el material refractario.
Para determinar la composición mineralógica se utilizan técnicas instrumentales como son la
difracción de Rayos X (DRX) y el análisis cuantitativo por microsonda (SEM-EDAX). También
utilizando microscopía se puede realizar un análisis de fases y su mutua ordenación.
A la vista del análisis mineralógico, se puede responder a los interrogantes planteados a la vista de los
resultados del análisis químico del material refractario. Así, para refractario silico-aluminoso, del que
se dio la composición química en el apartado anterior, se puede responder a los siguientes
interrogantes:
1.- ¿Qué proporción de SiO2 se encuentra libre?.
2.- ¿Bajo que forma cristalina (Cuarzo, tridimita, cristobalita) se encuentra el SiO2 libre?.
3.-¿Qué parte del SiO2 se encuentra en la materia amorfa intergranular (Constituyente matriz)?.
La cantidad de fase con estructura no cristalina (Fase vítrea), o lo que es lo mismo el grado de
vitrificación es difícil de determinar, pudiendo detectarse su presencia mediante la difracción de Rayos
X , pues en el difractograma debe de aparecer una banda difusa debida a la fase vítrea (Figura 3.2.1)
6
Figura 3.2.1.- Difractograma con una banda difusa.
En la figura 3.2.2 puede verse el difractograma de la sílice cristalina y amorfa.
Figura 3.2.2.- Difractograma de la sílice cristalina y amorfa.
El grado de vitrificación tiene su importancia, ya que la fase vítrea es mucho más vulnerable, por lo
general, al ataque de escorias que el fieltro de cristales bien entrelazados. Así mismo, el aumento del
grado de vitrificación produce una disminución de la resistencia mecánica y de la refractariedad.
La extensión del grado de vitrificación se puede reducir mediante un recocido a alta temperatura. Sin
embargo, este tratamiento influye desfavorablemente sobre la resistencia al choque térmico (lo que no
quiere decir que una alta resistencia a la compresión suponga siempre una baja resistencia al choque
térmico).
3.3.- Tamaño de los cristales.
Los agregados de pequeños cristales pueden disolverse y transformarse por infiltración de substancias
más rápidamente que una estructura cristalina gruesa (Grandes cristales).
Para reconocer la estructura mineral se utilizan generalmente dos métodos independientes entre sí:
Utilizando microscopios de polarización pueden hacerse visibles micro estructuras, distintos minerales
y su mutua ordenación.
7
Para proceder a la observación a la luz incidente, se cortan trozos de ladrillos que deberán ser
impregnados con resinas, debido a la porosidad relativamente alta de los ladrillos refractarios,
(aproximadamente 10-25 %), con el fin de evitar que se rompan los granos al rectificarlos. Estos
pedazos se cortan después en rajas finas y se rebajan hasta conseguir un espesor de 20-30 micras,
empleando distintos procedimientos de rectificado.
Para analizar los minerales opacos o estructuras cristalinas muy finas, se emplean secciones de
ladrillos refractarios bien pulidos, en lugar de láminas rectificadas, utilizando distintas granulaciones
de rectificado y pulido que puedan corroerse parcialmente con el fin de diferenciar mejor las distintas
fases cristalinas. La decisión a considerar de si se debe analizar en láminas o en secciones depende
muchas veces del planteamiento del problema.
Una segunda posibilidad para analizar las fases cristalinas es la inspección radiográfica de estructura
fina o análisis de rayos de difracción (RBA). Como las materias cristalinas tienen una estructura fina
ordenada, los rayos X se pueden fraccionar de manera que se obtenga para cada tipo de cristal una
imagen de difracción que se anota en el diagrama por medio del detector y registrador. En los
diagramas de rayos de difracción de productos refractarios con forma de polvo o productos de
reacción, se pueden identificar los distintos componentes cristalinos; cuya cuantía puede ser calculada
en la mayoría de los casos. Asimismo puede reconocerse tanto el alto grado de fase cristalina como la
formación de cristales de mezcla.
3.4.-Densidad. Porosidad Compacidad.
La densidad de un material se define como la masa del mismo por unidad de volumen, es decir
M
ρ=
V
Por lo tanto, para poder determinar las densidades de un material, definidas éstas como el cociente
entre la masa y el volumen, se realizará de la siguiente forma:
La masa: se adoptará siempre para calcular la densidad, el valor de la masa de la muestra seca a peso
constante, que será:
Masa probeta = Masa sólido + Masa aire ≅ Masa sólido
El volumen: cabe distinguir tres tipos de volúmenes que un material puede presentar en el espacio
dependiendo de que consideremos el contenido o no de huecos de éste.
Partiendo de la consideración de que todo material está formado por una determinada cantidad real de
materia (compacidad) y una cantidad de huecos (porosidad), podemos clasificar los distintos
volúmenes como se muestra en la figura 3.4.1.
Así el volumen total (VT) (Otros lo denominan volumen aparente) de un material consta de los
siguientes sumandos:
VT = Vm + Vpc + Vpa
( 3.4.1 )
donde :
Vm = Volumen ocupado por la masa de material (Volumen másico).
Vpc = Volumen ocupado por los poros cerrados (No comunicados con el exterior).
Vpa = Volumen ocupado por los poros abiertos (Accesibles desde el exterior).
8
Figura 3.4.1.- Distintos volúmenes que presenta un material.
La suma del volumen másico (Vm) mas el volumen de los poros cerrados (Vpc ) se denomina ,
habitualmente, volumen aparente (Vap ), (Otros lo denominan volumen relativo) ,es decir no se
consideran los huecos abiertos:
Vap = Vm + Vpc
(3.4.2)
Los poros abiertos a su vez pueden ser permeables o impermeables (Comunicados o no comunicados).
Debido a las expresiones (3.4.1) y (3.4.2)
teniendo en cuenta la definición de densidad
(Masa/Volumen) se pueden definir tres tipos de densidades (Según por que volumen se divida). La
masa total se asimila a la del sólido (M), ya que la del aire puede despreciarse. Así tenemos:
Densidad real = ρ =
M
Vm
Densidad aparente = ρ ap =
Densidad global = ρ g =
M
Vap
M
Vt
En materiales muy compactos las dos últimas densidades pueden diferir en un 2 % solamente.
Porosidad. Compacidad.
La porosidad de un material conformado incide directamente en su resistencia mecánica (que
disminuye al aumentar la porosidad). Otras características importantes como el comportamiento frente
al ataque químico, la conductividad térmica y la resistencia al choque térmico, quedan también
influenciadas por el tamaño, forma, número y distribución de los poros.
Así, cualquier porosidad residual tendrá un efecto negativo en las propiedades elásticas y en la
resistencia. Por ejemplo, se ha observado que la magnitud del módulo de elasticidad E disminuye con
la fracción de volumen de porosidad de acuerdo con la ecuación:
(
E = E0 1 − 1.9P + 0.9P 2
)
(3.4.3)
9
donde E o es el módulo de elasticidad del material no poroso. La influencia de la fracción de volumen
de porosidad sobre el módulo de elasticidad para la alúmina se muestra en la figura 3.4.2. La gráfica
representada en dicha figura es la curva de la ecuación (3.4.3).
Figura 3.4.2.-
Influencia de la porosidad en el módulo de elasticidad del Al 2 O3 a temperatura
ambiente.
La porosidad es desfavorable para la resistencia a la fractura (o módulo de rotura) por dos razones:
(1).- Los poros reducen el área de la sección a través de la cual se aplica la carga,
(2).- Actúan como concentradores de tensión: en el caso de un poro esférico la tensión es
amplificada en un factor 3.
La influencia de la porosidad en la resistencia es mucho más dramática, por ejemplo, no es raro que un
10 % de porosidad disminuya el módulo de rotura en un 50 % del valor medido para el material no
poroso. El grado de influencia del volumen de poros sobre la resistencia a la rotura se demuestra en la
figura 3.4.3, de nuevo para la alúmina. Experimentalmente, se ha demostrado que el módulo de rotura
disminuye exponencialmente con la fracción de volumen de poros (P) según la fórmula de Ryshkevich:
σ mf = σ 0 exp ( −nP )
(3.4.4)
En esta expresión σ0 (Módulo de rotura del material no poroso) y n son constantes experimentales.
Figura 3.4.3.- Influencia de la porosidad en el módulo de rotura del Al 2 O3 a temperatura ambiente.
10
También existe la fórmula de Balshin:
σ = σ 0 1−
P
100
n
(3.4.5)
Dentro de los materiales conformados definimos la porosidad abierta, P a como la relación existente
entre el volumen de poros comunicados al exterior (Vpa ) y su volumen total, VT , expresado en tanto
por ciento de este último. Igualmente definimos la porosidad total, P T, como la relación existente la
suma de los volúmenes de poros abiertos y cerrados (Vpc + Vpa ) a su volumen total, VT, así como la
porosidad cerrada, P c , como la relación entre Vpc y VT , es decir:
Pa =
V pa
VT
100 ,
Pc =
V pc
VT
100 ,
PT =
V pa + V pc
VT
100
(3.4.6)
La compacidad se define como: C = 100 – P T.
Capacidad de absorción.
Se entiende por capacidad de absorción de agua, la relación existente entre el peso del agua absorbida,
hasta saturación (H – P), por un material y su peso en seco (P) , expresada en tanto por ciento de éste
último. H es la masa de la probeta húmeda saturada.
Capacidad de absorción de agua: A =
H −P
100
P
(3.4.7)
A continuación, se comentarán los métodos para la obtención de los distintos tipos de volumen.
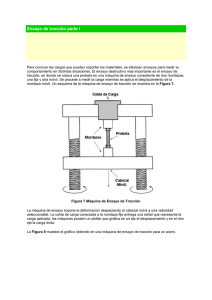
Método de la balanza hidrostática: es el método utilizado para obtener el volumen total y aparente. Si
bien es cierto que de un cuerpo regular la obtención del volumen total sería tan simple como medir sus
aristas y operar, existe una gran gama de materiales cuyas formas son totalmente irregulares, de los
cuales no se puede obtener su volumen total de forma tan simple. Este método se fundamenta en dos
principios básicos; el primero tras la comparación de masas permite la obtención de volúmenes, el
segundo en el conocido principio de Arquímedes.
Como se aprecia en la figura 3.4.4, la balanza dispone de un brazo corto desde el cuál se suspende e
introduce en un líquido (normalmente agua), el material del que pretendemos obtener su volumen.
Dicho material se ha introducido en la misma, saturado totalmente de agua para que el valor del
volumen que expresa el empuje, sea el volumen total, es decir, nos de información de la cantidad real
de materia así como de todos los huecos. En el brazo largo, colocaremos pesas de masa conocida hasta
equilibrar la balanza. El valor de dichas pesas, es lo que conocemos por masa de la probeta sumergida
(S).
Figura 3.4.4.- Método de la balanza hidrostática.
11
Figura 3.4.4.- Método de la balanza hidrostática.
Para la saturación de la probeta se pueden utilizar dos métodos:
Método 1 (Figura 3.4.5).
.
Se introduce la probeta en un recipiente de manera que no quede tocando el fondo del mismo y se
añade agua destilada que se halle a la temperatura ambiente, hasta que cubra aproximadamente 1/4 de
su altura y se comienza a calentar. Se continua añadiendo agua cada media hora hasta que al cabo de
hora y media se encuentre completamente sumergida. A continuación, se hierve durante dos horas,
reponiendo el agua evaporada con agua destilada hervida y caliente, de tal modo que la probeta esté,
durante las dos horas, totalmente cubierta. Se deja enfriar dentro del agua hasta que alcance la
temperatura ambiente.
Figura 3.4.5.- Saturación de la probeta por inmersión progresiva en agua a ebullición.
Método 2 (Figura 3.4.6).
Se coloca la probeta seca y enfriada en un recipiente estanco. Cerrado el recipiente, se hace el vacío
hasta que se alcance una presión, constante de 25 mbar y se mantiene esta presión durante 15 minutos
como mínimo Para comprobar que se ha conseguido la desgasificación total de la probeta, se
desconecta el recipiente de la bomba de vacío y se comprueba, mediante el manómetro que no aumenta
la presión en el interior. Se vuelve a conectar el recipiente a la bomba de vacío y se introduce
progresivamente el líquido de inmersión, de forma que, al cabo de 3 minutos la probeta esté
totalmente recubierta de líquido. Se mantiene esta presión reducida durante 30 minutos, se desconecta
la bomba y se abre el recipiente.
12
Figura 3.4.6.- Instalación de vacío para la determinación de la densidad aparente y porosidad abierta.
Masa de la probeta húmeda, H.
Se extrae la probeta del agua, se eliminan las gotas de agua de su superficie utilizando un trapo
ligeramente húmedo y se pesa con una precisión mínima de 0,1 g.
Será igual a:
de donde :
H = P + V pa ρl
V pa =
H −P
(3.4.8)
ρl
siendo P = Masa de la probeta seca.
Masa de la probeta sumergida, S.
Seguidamente se pesa suspendida dentro de agua destilada, en la balanza hidrostática, con precisión
mínima de 0,1 g.
Si expresamos matemáticamente lo que está ocurriendo en la balanza cuando esta está equilibrada,
tendremos:
PS = PH − EMPUJE
o bien
gS = gH − ρlVT g ,
S = H − ρlVT
(3.4.9)
de donde:
VT =
H −S
ρl
(3.4.10)
13
Por otra parte, sustituyendo el valor de H en (3.4.6) se tiene:
S = P + V pa ρ l − ρlVT
VT = Vm + Vpc + Vpa
De:
o bien :
se deduce :
ρ l (VT − V pa ) = P − S
(3.4.11)
VT − Vpa = Vm + Vpc = Vap
Luego:
ρlVap = P − S , de donde : Vap =
P−S
ρl
(3.4.12)
Hay que destacar, que el líquido utilizado para el ensayo no sea capaz de reaccionar con el material,
así como su densidad siempre debe ser inferior al mismo.
Estamos ya en condiciones de calcular la densidad global, la densidad aparente y la porosidad abierta,
así como la capacidad de absorción.
Densidad aparente = ρ ap =
Densidad global = ρ g =
P
P
=
ρl
Vap P − S
P
P
=
ρl
Vt H − S
Porosidad abierta = Pa =
V pa
Vt
100 =
Capacidad de absorción = A =
H −P
100
H −S
H −P
100
P
(3.4.13)
(3.4.14)
(3.4.15)
(3.4.16)
Nos queda por determinar la densidad real y una de las otras porosidades (cerrada o total), ya que la
otra se calculara por suma o diferencia.
Densidad real.
Los métodos basados en el principio de Arquímedes no pueden dar la densidad real de los materiales
porosos, como son la mayoría de los materiales de construcción. Esto sucede porque parte de la
porosidad es inaccesible al líquido en el que sumergimos el ladrillo, los poros cerrados o aquellos
abiertos que no permitan la entrada del líquido o fluido. Para obtener en este caso la verdadera
densidad, o mejor, el verdadero peso específico, necesitamos pulverizar el material a una malla que
produzca la rotura de los pequeños poros y de los poros cerrados.
El fin que se persigue con la pulverización es hacer desaparecer, pues, los poros cerrados y poder
hacer una medida del volumen que ocupa el material sólido (Figura 3.4.7). El líquido de inmersión
penetra entre las partículas de sólido una vez que se elimina el aire que existe entre ellas.
14
Figura 3.4.7.- Eliminación de los poros cerrados por pulverización.
Se pueden usar los siguientes métodos:
a.- El método del picnómetro.
b.- El método del frasco (Rees - Hugill) o del volumenómetro.
Método del picnómetro.
Método 1.
El picnómetro es un matraz calibrado de 25 ó 50 ml., provisto de un tapón de tubo capilar aforado,
construido de manera que, entre el tapón y la boca del frasco, no existe la posibilidad de retención de
burbujas.
En el picnómetro se pesan 2 - 5 g. del material, secado previamente a 110 ± 2 °C durante 2 horas, se
añade líquido desairado (agua), aproximadamente 1/3 de su capacidad, se agita con cuidado para
eliminar las burbujas de aire, y se lleva hasta ebullición con precaución, para expulsar totalmente el
aire ocluido entre las partículas. (La forma de eliminar el aire entre partículas, pues los poros cerrados
ya han sido destruidos; puede hacerse también por medio de una bomba de vacío). El líquido de
inmersión puede ser agua, tolueno, xileno,etc., dependiendo de la naturaleza química de la muestra y
de su finura).
Una vez que el picnómetro más muestra se encuentre a temperatura ambiente y haya sedimentado el
material, se llena con agua desairada, utilizando una pipeta y haciendo que el líquido resbale
lentamente por la pared del picnómetro, colocando, a continuación el tapón con cuidado, para que el
líquido sobrante salga por el tubo capilar.
A continuación, se introduce en un baño termostático a 25 ± 0.1 °C durante 30 minutos, siempre y
cuando la temperatura ambiente no exceda de 20 °C , si así fuera, la temperatura del baño será
mantenida a menos de 5 °C por encima de la temperatura ambiente. Al cabo de 30 minutos, se enrasa
el picnómetro, aún dentro del baño, se saca de él, se seca externamente con cuidado, con un paño sin
frotar, y se pesa en una balanza analítica, con una precisión de 0.001 g.
Una vez realizada esta pesada, se vierte su contenido, se enjuaga cuidadosamente con líquido
desairado para no dejar partículas adheridas, y se seca exteriormente. Se llena, a continuación, con el
líquido de inmersión y se enrasa; se sitúa seguidamente el picnómetro en el baño termostático durante
30 minutos a la misma temperatura y, pasando ese tiempo, se enrasa, se saca, se seca y se pesa.
15
Método 2.
Determinación de la masa inicial de la muestra para el ensayo.
Se limpia el picnómetro vacío y se asegura que esté completamente seco. Se deja que alcance una
temperatura próxima a la temperatura ambiente. Se pesa el picnómetro vacío, limpio y provisto de su
tapón, redondeando al 0.0002 g más próximo. Sea su valor m.
Se introduce en el picnómetro una cantidad de materia seca igual a. aproximadamente, 1/3 del
volumen del picnómetro. Cuando este y su contenido han alcanzado la temperatura ambiente, se pesa
el conjunto, redondeando al 0.0002 g más próximo Sea su valor m 1 . La diferencia entre las dos pesadas
representa la masa inicial del material ensayado (m1 -m).
Existe un procedimiento operatorio alternativo que puede utilizarse si es difícil mojar con el liquido la
muestra para ensayo. El empleo de este procedimiento debe mencionarse en el informe del ensayo.
Determinación de la masa del picnómetro con la muestra para ensayo y el líquido de ensayo (m 2 ).
Se añade al picnómetro una cantidad de agua hervida desgasificada u otro líquido de densidad
conocida, de manera que el picnómetro se llene 1/2 ó 2/3 de su capacidad. Se coloca en un secador y
se somete a un vacío, cuya presión residual no sobrepase 2500 Pa, hasta que no se observe la
producción de burbujas de aire. Con el fin de asegurar un mojado completo, se puede agitar el picnómetro por medio de un dispositivo colocado en el desecador, o con la ayuda de cualquier otro
método. Si se utiliza un líquido diferente al agua, no debería ebullir a la presión utilizada.
Se llena el picnómetro con agua o con el liquido escogido, prácticamente en su totalidad, y se deja que
el contenido se asiente hasta que el líquido sobrenadante este sólo ligeramente turbio (normalmente es
suficiente una noche).
Se rellena cuidadosaniente el picnómetro, se coloca el tapón de vidrio y se elimina cuidadosamente el
líquido que sobra. Se coloca el picnómetro en el baño termostático y se eleva a una temperatura
situada entre 2 °C y 5 °C por encima de la temperatura ambiente (esta temperatura es la temperatura de
ensayo). Se mantiene esta temperatura constante, dentro de ± 0.2 °C.
A medida que la temperatura se eleva, un poco de líquido se escapa por el tubo capilar del tapón. Se
elimina cuidadosamente este líquido, absorbiéndolo con un papel filtro. El picnómetro alcanza la
temperatura de ensayo cuando el líquido cesa de escaparse por el tubo capilar. Se retira el picnómetro
del baño termostático. teniendo cuidado de que el calor de la mano no caliente el picnómetro y
ocasione una perdida suplementaria de líquido (se puede evitar un calentamiento de este tipo
sumergiendo el picnómetro completamente lleno, durante algunos segundos, en agua fría, evitando
mojar la parte superior del cuello o del tapón esmerilado). Se escurre y seca cuidadosamente el
exterior del picnómetro y después se pesa, redondeando al 0.0002 g más próximo (m2 ).
Determinación de la masa del picnómetro lleno del líquido de ensayo (m 3 ).
Se vacía y limpia el picnómetro. Se llena, casi completamente, con agua o con el líquido de ensayo
elegido.
Se repite el procedimiento operatorio descrito con el objeto de determinar la masa del picnómetro del
líquido de ensayo (m 3 ).
16
Densidad del agua en función de la temperatura, comprendida entre 15 °C y 30° C.
El procedimiento descrito puede reemplazarse por el procedimiento operatorio alternativo siguiente si
el material resulta difícil de mojar con el líquido y si su inmersión en el líquido no es satisfactoria.
Se introduce en el picnómetro seco una cantidad de agua hervida desgasificada, u otro líquido de
densidad conocida, sin rebasar 1/4 de la capacidad del picnómetro. Se pesan este y el líquido,
redondeando al 0.0002 g más próximo.
Se introduce en el picnómetro una cantidad de material seco equivalente a, aproximadamente, 1/3 del
volumen del picnómetro. Se pesa éste nuevamente, redondeando al 0.0002 g más próximo.
Con los pesos del picnómetro vacío (m), con el polvo (m 1 ), lleno del líquido de inmersión (m 3 ) ,
picnómetro más polvo y líquido (m 2 ) , y la densidad del agua a la temperatura del baño termostático
con relación a la del agua a 4°C, se determina la densidad real de la muestra, con una precisión de ±
0.01 g.
Conocidas las 4 pesadas la densidad real se calcula como sigue (Figura 3.4.8):
Densidad real = ρ =
donde : M = m1 – m
y
M
Vm
Vm = Vp – Vl
siendo :
Vp = Volumen del picnómetro
Vp = Volumen que ocupa el líquido en el picnómetro con muestra.
Se tiene que :
Vl =
m2 − m1
ρl
Vp =
y
m3 − m
ρl
con lo que :
Vm = Vp – Vl =
(m3 − m) − (m2 − m1 )
ρl
17
Y sustituyendo en la expresión de la densidad real:
ρ=
M
(m1 − m) ρl
=
Vm
(m1 − m) − (m2 − m3 )
(3.4.17)
Figura 3.4.8.- Cálculo de la densidad real por el método del picnómetro.
18
Método del volumenómetro
A diferencia del método anterior, su exactitud es mucho menor, debido a que no se hierve, ni se
somete a vacío, ni se utiliza el baño termostático. Es, por tanto, un método orientativo de la densidad
del material analizado. Para determinar la densidad, se pesan unos 30 g. (M) de muestra pulverizada
y seca. Como se aprecia en la figura 3.4.9, se introduce en el volumenómetro que previamente
contenía una determinada cantidad de líquido (agua, xileno, etc) enrasada en Vi . En este instante, se
experimenta un incremento de nivel de la columna de agua hasta Vf . Al disponer éste de una regla
graduada, el volumen real será la diferencia de ambas lecturas:
Vm = Vf - Vi
A partir de los datos obtenidos, se calcula la densidad de la muestra:
ρm =
M
V f − Vi
(3.4.18)
Figura 3.4.9.- Método del volumenómetro
El líquido utilizado debe de ser de baja volatilidad y viscosidad, con el fin de que no modifique la
pesada en el tiempo y para que se introduzca con facilidad en los huecos que existen entre las
partículas del polvo.
El valor de la densidad real, ρr . , es un parámetro de gran importancia para el conocimiento de
muchos materiales refractarios, al indicar su grado de transformación (sílice, silimanita, andalucita,
etc.) ó bien puede dar una idea sobre el contenido de alúmina e indirectamente, permite calcular la
porosidad total si se conoce también la densidad global del ladrillo refractario.
Una vez determinada la densidad real se puede determinar la porosidad total de la muestra y a
continuación por diferencia la porosidad cerrada.
PT =
V pa + V pc
VT
M
Vm
VT − Vm
ρr
100 =
100 = 1 −
100 = 1 − M
VT
VT
ρg
ρg
100
=
1 −
ρr
100
es decir,
ρg
PT = 1 −
100
ρr
(3.4.19)
19
Análogamente, se puede expresar la porosidad abierta en función de la
aparente, resultando:
Pa =
V pa
Vt
100 =
VT − Vap
VT
M
ρ ap
Vap
100 = 1 −
100 = 1 − M
VT
ρg
densidad global y de la
ρg
100
=
1
−
100
ρ
ap
es decir,
ρg
Pa = 1 −
ρ ap
100
(3.4.20)
Y finalmente la porosidad cerrada:
ρg
ρg
100 = 1 −
100 =
100 - 1 −
Vt
ρr
ρ ap
luego:
Pc =
V pc
P c = 100 ρ g
ρg ρg
ρ r − ρ ap
−
100 = 100 ρ g
ρ r ρ ap
ρ ap ρ r
ρ r − ρ ap
ρ r ρ ap
(3.4.21)
Absorción y humedad.
Es la máxima cantidad de agua que puede entrar en los huecos accesibles.
La absorción normal es la cantidad de agua absorbida hasta saturación por un material a presión y
temperatura ambiente.
A=
PSAT − PS
100
PS
(3.4.22)
donde:
P SAT = Peso saturado.
P S = Peso seco.
La absorción a ebullición es cuando se saturan las probetas por ebullición durante dos horas, una vez
que se han cubierto paulatinamente de agua.
La humedad es la proporción en peso de agua sobre el sólido.
H=
PH − PS
100
PS
(3.4.23)
donde:
P H = Peso de la probeta humeda.
20
Cálculos de la densidad de las cerámicas.
Es posible calcular la densidad teórica de un material cerámico cristalino a partir de los datos de la
celdilla unidad de una forma similar a la descrita para los metales. En este caso la densidad ρ puede
determinarse utilizando una forma modificada de la ecuación deducida para los metales de la forma
siguiente:
ρ=
n ' ( ΣAC + ΣAA )
VC N A
(3.4.24)
donde:
n' = Numero de unidades de formula en la celdilla unidad
Σ AC = Suma de los pesos atómicos de todos los cationes en la unidad de fórmula
Σ AA = Suma de los pesos atómicos de todos los aniones en la unidad de fórmula
VC = Volumen de la celdilla unidad
NA = Numero de Avogadro, 6.023 x 10 23 unidades de fórmula/ mol
Unidades de formula: son todos los iones que están incluidos en la formula química unidad. Por
ejemplo, en el caso del BaTiO3 , una unidad de formula consiste en un ión de bario, un ión de titanio y
tres iones de oxigeno.
3.5.- Tamaño y tipo de poros.
En función de la importancia funcional de los poros, al filtrar líquidos (gases) a través de los productos
refractarios, entre los poros abiertos se encuentran poros impermeables (ciegos) y permeables. A su
vez, los poros permeables se dividen en poros:
(1).- De canal (grandes, d ≥ 5 µm);
(2).- Que no son de canal (espacios muertos, poros en forma de matraz y poros pequeños, d < 5 µm).
Casi no participan en la filtración de los fundidos, gases y vapores.
(3).- Capilares (porosidad condicional)
(4).- No capilares.
La resistencia de los refractarios que trabajan bajo la acción de las masas fundidas se eleva considerablemente al disminuir su porosidad. No obstante, se conocen casos en los que productos refractarios
de igual composición químico-mineralógica y de igual porosidad abierta, y en condiciones
aproximadamente iguales, se comportan de distinta manera.
Se ha establecido que uno de los factores que determinan una menor resistencia es la menor porosidad
condicional (capilar), siendo bastante aproximados los valores de la porosidad abierta, composición
química, y otras propiedades.
Se deduce que, cuando las demás condiciones son iguales, las propiedades de los productos
refractarios se aprecian no tanto por el volumen total de los poros abiertos como por el tipo de la
porosidad, es decir, por la importancia funcional de los poros, su dimensión y otras particularidades de
la estructura.
Los poros de canal son continuos y tienen también un curso sinuoso. Es por los poros de canal, bajo el
influjo del gradiente de presión, por donde transcurre la migración capilar de las masas fundidas, y
durante ello su curso se endereza considerablemente. Los poros de este tipo se muestran en la figura
3.5.1.
21
Figura 3.5.1.- Poros de canal
Para determinar la distribución y el tamaño de los poros se utiliza, generalmente, la técnica
instrumental de porosimetría de mercurio. El método consiste en la intrusión de mercurio bajo presión
creciente. El principio de la medida se basa en la ecuación de Washburn:
PC =
4σ cosθ
d
(3.5.1)
donde:
P C = Presión capilar
σ = Tensión superficial del mercurio
θ = Angulo de contacto;
d = Diámetro de los poros alcanzados por el mercurio.
La elección del mercurio se hace en base a cuatro razones principalmente:
- Es el líquido con mayor tensión superficial (480 mN/m).
- Es químicamente inerte para los productos estudiados.
- Es un líquido que no moja a casi ningún sólido (ángulo de contacto superior a 90°).
Para que se introduzca en los poros hemos de ejercer sobre él una presión superior o igual a la presión
capilar.
- Es conductor de la corriente eléctrica.
La tensión superficial varía con la temperatura. El valor del ángulo de contacto oscila siendo función
de la mineralización de la muestra, su grado de contaminación, su estado de rugosidad, y con el
protocolo de secado.
En un fluido cada molécula interacciona con las que le rodean. El radio de acción de las fuerzas
moleculares es relativamente pequeño, abarca a las moléculas vecinas más cercanas. Vamos a
determinar de forma cualitativa, la resultante de las fuerzas de interacción sobre una molécula que se
encuentra en (Figura 3.5.2):
A, el interior del líquido
B, en las proximidades de la superficie
C, en la superficie
22
Figura 3.5.2.- Resultante de las fuerzas de interacción sobre una molécula en un líquido.
Consideremos una molécula (en color rojo) en el seno de un líquido en equilibrio, alejada de la
superficie libre tal como la A. Por simetría, la resultante de todas las fuerzas atractivas procedentes de
las moléculas (en color azul) que la rodean, será nula.
En cambio, si la molécula se encuentra en B, por existir en valor medio menos moléculas arriba que
abajo, la molécula en cuestión estará sometida a una fuerza resultante dirigida hacia el interior del
líquido. Si la molécula se encuentra en C, la resultante de las fuerzas de interacción es mayor que en el
caso B.
Las fuerzas de interacción, hacen que las moléculas situadas en las proximidades de la superficie libre
de un fluido experimenten una fuerza dirigida hacia el interior del líquido. Por lo tanto, si se quiere
aumentar la superficie libre del líquido, será a expensas de llevar moléculas del mismo, a dicha
superficie, tomándolas del interior del líquido, lo cual requiere un consumo de energía.
Como todo sistema mecánico tiende a adoptar espontáneamente el estado de más baja energía
potencial, se comprende que los líquidos tengan tendencia a presentar al exterior la superficie más
pequeña posible.
En las proximidades de la pared de un recipiente, una molécula del líquido (señalada en color rojo)
experimenta las siguientes fuerzas (Figura 3.5.3):
- Su peso, P
- La fuerza de cohesión que ejercen el resto de las moléculas del líquido sobre dicha molécula Fc .
(Fuerza líquido – liquido)
- La fuerza de adherencia que ejercen las moléculas de la pared sobre la molécula del líquido Fa
(Fuerza líquido-sólido).
- Fuerza aire – líquido
23
(a)
(b)
(c)
Figura 3.5.3.- Fuerzas que experimenta una molécula del líquido en las proximidades de la pared de un
recipiente
Los líquidos poseen las propiedades de cohesión y adhesión debido a la atracción molecular. Debido a
la propiedad de cohesión, los líquidos pueden resistir pequeñas fuerzas de tensión en la interfase entre
el líquido y aire, conocida como tensión superficial.
La cohesión permite al líquido resistir esfuerzos de tracción, mientras que la adhesión permite que se
adhiera a otros cuerpos.
Si las moléculas líquidas tienen mayor adhesión que cohesión, entonces el líquido se pega a las
paredes del recipiente con el cual está en contacto, resultando en un aumento (elevación) de la
capilaridad de la superficie del líquido. Un predominio de la cohesión causa por el contrario una
depresión de la capilaridad.
Supondremos despreciable la fuerza que ejercen sobre la molécula considerada, las moléculas de vapor
por encima de la superficie del líquido. En la figura 3.5.3.a se muestran las fuerzas sobre dos
moléculas, una que está muy cerca de la pared y otra que está más alejada. En la figura3.5.3.b, se
muestra la resultante de dichas fuerzas. La superficie es siempre normal a la resultante. Cuando las
moléculas están alejadas de la pared, la resultante debida al peso y a las fuerzas de cohesión (las
fuerzas de adherencia son despreciables) es vertical hacia abajo, la superficie es entonces, horizontal.
Pueden ocurrir dos casos según sea la intensidad de las fuerzas de cohesión y adherencia.
24
- Que el líquido moje, por ejemplo, agua en un recipiente de vidrio. Las fuerzas de adherencia son
mucho mayores que las de cohesión.
- Que el líquido no moje, por ejemplo, mercurio en un recipiente de vidrio. Las fuerzas de cohesión
son mayores que las de adherencia.
En los líquidos que mojan, la resultante de las fuerzas que actúan sobre las moléculas próximas a la
pared, está dirigida hacia el interior de la pared, por lo que la forma de la superficie del líquido es
cóncava (menisco cóncavo).
En los líquidos que no mojan, la resultante de las fuerzas que actúan sobre las moléculas próximas a la
pared, está dirigida hacia el interior del líquido, por lo que la forma del la superficie del líquido será
convexa (menisco convexo).
Recibe el nombre de ángulo θ de contacto, al formado por la tangente a la superficie del menisco en el
punto de contacto con la pared. Este ángulo es agudo cuando el líquido moja y es obtuso cuando el
líquido no moja. El ángulo de contacto θ depende exclusivamente de las fuerzas adhesivas y cohesivas.
Asumiendo una forma cilíndrica de los poros (Figura 3.5.4) es posible relacionar la presión, p, bajo la
cual se introduce el mercurio en un poro de diámetro d = 2r. En un poro con una sección transversal
circular de radio r, la tensión superficial del liquido en el capilar actúa como una fuerza repulsiva que
empuja al liquido hacia fuera del poro y que viene dada por:
FC = 2π rσ
(3.5.2)
donde σ es la tensión superficial del mercurio.
La componente de la fuerza anterior en la dirección del eje del capilar (poro) es:
FC1 = 2π r σ cos (θ )
(3.5.3)
Donde θ es el ángulo de contacto con el cual el mercurio penetra en los poros. En el caso del mercurio
en contacto con la gran mayoría de los materiales el ángulo de contacto θ vale 135 º
En el equilibrio la fuerza de capilaridad se equilibra con la fuerza debida a la presión externa, p, que
fuerza a penetrar al líquido (mercurio) en los poros, y que vale:
FP = π r 2 p
Igualando ambas fuerzas se tiene:
FC1 = FP
de donde:
d=
→
4σ cos (θ )
p
(3.5.4)
π r 2 p = 2π rσ cos (θ ) = dπσ cos (θ )
(Ecuación de Washburn)
(3.5.5)
25
La ecuación de Washburn nos indica que a presiones bajas el mercurio penetra o es forzado a penetrar
en los poros grandes (diámetros grandes) y el cambio de volumen suele ser pequeño y a presiones altas
en los pequeños (diámetros pequeños) y el cambio de volumen es mayor. Por tanto, es posible
determinar el radio de los poros usando dicha ecuación conociendo la presión a la cual el mercurio
comienza a penetrar en los poros. El grado de intrusión del mercurio depende de la presión aplicada, el
diámetro del poro, la tensión superficial y el ángulo de contacto.
FC
Figura 3.5.4.- Esquema mostrando la intrusión de mercurio en un poro de diámetro 2r. Debido a las
fuerzas de cohesión entre el liquido y la pared, la forma de la superficie del liquido
tiene un ángulo de contacto caracteristico θ.
En la práctica, el volumen de mercurio introducido en el interior de los poros se determina por la
variación del nivel de mercurio en un tubo (penetrometro) conectado al equipo de medida y que
contiene a la muestra objeto de medida. La figura 3.5.5 representa un esquema del penetrometro.
Figura 3.5.5.- Esquema del penetrómetro. Espacio para la muestra.
Después de que se alcanza un nivel de vacío bajo (~ 3 kPa) con objeto de desgasificar la muestra, la
celda del penetrometro se va llenando con mercurio al ir incrementando la presión de forma continua.
Cuando el valor de la presión va aumentando, el mercurio va penetrando en poros cada vez más
pequeños y más pequeños y el equipo mide el volumen intruido por medio de los cambios en el nivel
del mercurio.
26
Si tiene lugar una variación en el nivel del mercurio cuando la presión aumenta desde el valor
pi −1 a pi se entiende que es una indicación de que existen en la muestra poros con un diámetro:
di =
4σ cos (θ )
pi
(3.5.6)
Es importante señalar que la variación en el nivel del mercurio es proporcional al número de poros
existentes en la muestra con dicho diámetro. Por tanto, la presión con la cual el mercurio penetra en la
muestra determina el diámetro del poro y el incremento de volumen introducido la cantidad relativa de
poros con dicho diámetro. La gráfica representando el volumen incremental de mercurio introducido
en función del diámetro de poro nos da un método conveniente para determinar el tamaño de los poros
y su distribución.
En los poros en forma de matraz o con una cámara al final (Figura 3.5.6), el porosímetro nos mide el
radio de acceso al poro y no el radio de la cámara final.
Figura 3.5.6.- Poro en forma de matraz.
En la tabla 3.5.1 se dan los resultados de un análisis y en las figuras 3.5.7, 3.5.8, 3.5.9 y 3.5.10 las
gráficas obtenidas de dichos resultados.
27
Tabla 3.5.1.- Resultados de un análisis por porosimetría de mercurio.
28
3
Figura 3.5.7.- Volumen de poros acumulado (cm /g) en función del diámetro de poro
29
Figura 3.5.8.-Volumen total de poros en función del diámetro de poro
30
Figura 3.5.9.-
∆V
en función del diámetro de poro
∆ log(D )
31
2
Figura 3.5.10.- Area superficial acumulada (m /g) en función del diámetro de poro
32
3.6.- Permeabilidad.
Es la propiedad que tienen los cuerpos a dejarse atravesar por los fluídos.
Un modelo para determinar la permeabilidad de un lecho de partículas empaquetadas , al que también
se puede asimilar un material conformado, fue desarrollado por Darcy (1856) para explicar la
permeación a través de un filtro de arena. Observo que el caudal volumétrico, Q, a través del filtro de
espesor L (Figura 3.6.1) era proporcional a la diferencia de presión , ∆P , y al área de la sección
transversal A. La ecuación de Darcy es:
Q=
K D A∆P
L
(3.6.1)
donde KD es el coeficiente de permeabilidad de Darcy.
Normalizando la ecuación (3.6.1) para introducir la viscosidad del fluido, ηf, el coeficiente específico
de permeabilidad KP es:
K P = K Dηf
Con lo que la ecuación de Darcy se transforma en:
Q=
K P A∆P
ηf L
(3.6.2)
33
de donde y teniendo en cuenta que:
Q=
Volumen V
=
Tiempo
t
resulta:
KP =
η f LV
(3.6.3)
At ∆P
Figura 3.6.1.- Aparato para determinar el coeficiente de permeabilidad.
La ecuación (3.6.1) es válida siempre y cuando el flujo a través de los poros sea laminar, lo cual
puede estimarse mediante el número de Reynolds.
Re =
ρ f vaV
ηf
A
(3.6.4)
donde:
ρf = Densidad del fluido.
ηf = Viscosidad absoluta del fluido.
aV A = Dimensión media de los canales debidos a la porosidad abierta interconectada
v = Velocidad media del fluido en los canales entre las partículas con una dimensión media aV
A
En las rocas el fluido, generalmente, es el agua, y se define como la cantidad de agua, en litros que la
atraviesan en una hora y a una presión dada.
34
Para pequeñas cargas de agua se emplean cubos de 7.07 cm. de arista, o sea 50 cm 2 de superficie,
saturados de agua durante 48 horas, y se mantienen sumergidos en agua durante toda la experiencia.
Para determinar la permeabilidad a presiones mayores se emplean acumuladores de aire comprimido
que permiten mantener una presión constante, y se aprecia por un manómetro. La probeta se sujeta
fuertemente al aparato y se recoge el agua que la atraviesa en un tubo graduado.
La permeabilidad a los gases (por ejemplo, aire) se determina haciendo atravesar la probeta por un
volumen de gas bajo el efecto de una diferencia de presión. Como unidad de medida se utilizará el
Perm.
Un cuerpo poroso tiene una permeabilidad de un Perm (Pm), cuando un centímetro cúbico de gas, con
la viscosidad de un poise, a una diferencia de presión de una dina por centímetro cuadrado, pasa, en
un segundo, por una sección de un centímetro cuadrado en dirección perpendicular, en una longitud de
un centímetro. Para la aplicación práctica se recomienda el Nanoperm, (nPm).
1 Pm = 109 nPm
Para su determinación se pueden utilizar probetas de forma cilíndrica con 50 mm de diámetro y 50 mm
de altura y una tolerancia de ±0,5 mm en ambas medidas. Las bases serán planas y paralelas. Se
colocarán en el porta-probetas según el esquema de la figura 3.6.2, el cual deberá efectuar una estanqueidad perfecta alrededor de la probeta, para lo cual estará provisto de una membrana de goma,
.
que se hinchará con una presión de, aproximadamente, unos 2 Kgf/cm 2
Para el cálculo de los resultados se aplicará la siguiente fórmula:
µ=
VLη
981∆PtS
(3.6.5)
en la cual:
µ = p ermeabilidad, en permes.
V = volumen de aire, en centímetros cúbicos
L = longitud de la probeta, en centímetros
η= viscosidad dinámica del aire, en poises
∆P = presión diferencial, en centímetros de columna de agua
t = tiempo, en segundos
S = sección de la probeta, en centímetros cuadrados.
35
Figura 3.6.2.- Esquema del porta - probetas
La viscosidad del aire a distintas temperaturas, es la dada en la tabla 3.6.1.
Tabla 3.6.1.- Viscosidad del aire
Temperatura
ºC
16
18
20
22
24
28
Viscosidad
Poises
1.788 x 10 -4
1.798 x 10 -4
1.808 x 10 -4
1.818x10 -4
1.828 x 10 -4
1.847 x l0 -4
La permeabilidad es una propiedad vectorial, es decir, varía según la dirección en la cual se realiza la
medida. La permeabilidad está relacionada con el tamaño y cantidad de poros del material, pero no
esta directamente ligada a la porosidad abierta.
Si se toma la presión en atmósferas y la viscosidad en centipoises, resulta la unidad denominada
Darcy.
1 Perm = 1.013x108 Darcy
36
4.- Propiedades térmicas.
4.1.- Introducción.
Por "propiedad o característica térmica" se entiende la respuesta de un material al ser calentado. A
medida que un sólido absorbe energía en forma de calor, su temperatura y sus dimensiones aumentan.
La energía puede transportarse de las regiones calientes a las regiones más frías de la muestra si existe
un gradiente de temperatura y, finalmente la muestra puede fundirse. La capacidad calorífica, la
dilatación térmica, la conductividad térmica y la refractariedad (Resistencia piroscópica) son
propiedades muy importantes en la utilización práctica de los materiales y, en particular, de los
materiales refractarios.
4.2.- Capacidad calorífica. Calor específico.
Cuando se calienta un material sólido, éste experimenta un aumento de temperatura, indicando con
ello que absorbe energía. La capacidad calorífica es una propiedad que indica la capacidad de un
material de absorber calor de su entorno. Representa la cantidad de energía necesaria para aumentar la
temperatura del material en una unidad.
Si Q es la cantidad de calor que hay que dar a un cuerpo para subir su temperatura de T1 a T2, se puede
definir el cociente siguiente:
Q
T
CT 2 =
1
Q
T2 − T1
(4.2.1)
T1
T2
el cual representa la capacidad calorífica promedio del cuerpo entre las temperaturas de T1 y T 2 .
Si las dos temperaturas T1 y T 2 tienden hacia un límite común T, el cociente tiende hacia un límite:
dQ
C=
(4.2.2)
dT
donde dQ es la energía necesaria para producir un cambio dT en la temperatura. Normalmente, la
capacidad calorífica se expresa por mol de material C (J/mol.K), obteniéndose la capacidad calorífica
molar, que puede ser a volumen constante, CV o a presión constante, CP .
La capacidad calorifica a volumen constante se define como (En los procesos a volumen constante
todo el calor tomado por el sistema se invierte en incrementar su energía interna dQV = dU ):
∂U
CV =
∂T V
(4.2.3)
donde:
U = Energía interna
T = Temperatura
Por su parte, la capacidad calorífica a presión constante se define como (En los procesos a presión
constante el calor absorbido equivale al incremento de entalpía del sistema dQP = dH ):
∂H
CP =
∂T P
(4.2.4)
37
donde:
H = U+PV = Entalpía del sistema
T = Temperatura
Existen dos métodos para medir esta propiedad, según cuáles sean las condiciones del medio en que se
realiza la transferencia de calor. Uno es medir la capacidad calorífica mientras se mantiene la muestra
a volumen constante, en este caso se representa por CV y el otro es bajo presión constante y se
representa por C P . La magnitud de C P es siempre mayor que CV . Sin embargo, esta diferencia es
muy pequeña para la mayoría de los materiales sólidos a temperatura ambiente e inferiores.
CP − CV = 9α 2VT / K
(4.2.5)
donde:
α = Coeficiente de dilatación lineal
K = Modulo de compresibilidad = −
∆P
∆V
V
(Cociente entre el cambio de presión y la
disminución relativa de volumen)
V = Volumen
T = Temperatura absoluta.
Para los sólidos la diferencia entre C P y C V es muy pequeña, ya que el valor de α es muy pequeño y el
de K grande.
A veces se utiliza el calor específico (a menudo representado por ce). Este representa la capacidad
calorífica por unidad de masa (J/kg.K) y se define como la cantidad de calor que hay que comunicar a
la unidad de masa con el fin de elevar un grado su temperatura, es decir:
ce =
∆Q
m∆T
(4.2.6)
La capacidad calorifica de un material esta influenciada por los efectos que la temperatura (Existencia
de una cierta energía térmica) ejerce sobre:
1.- Las vibraciones (u oscilaciones) de los átomos o iones alrededor de sus posiciones de equilibrio,
denominada energía vibracional y las rotaciones dentro del material, denominada energía
rotacional.
2.- Cambios del nivel de energía de los electrones en la estructura electrónica. Los electrones absorben
energía aumentando su energía cinética. Sin embargo, esto sólo es posible en el caso de electrones
libres, es decir: aquellos que han sido excitados desde los estados ocupados a los estados vacíos
por encima del nivel de Fermi. En los metales, solamente los electrones en estados muy cercanos a
la energía de Fermi pueden sufrir estas transiciones, y esto representa únicamente una fracción muy
pequeña del número total. Una fracción aún menor de electrones experimentan excitaciones en los
materiales aisladores o semiconductores. Por tanto, esta contribución electrónica es generalmente
insignificante, excepto a temperaturas cercanas a 0 K.
3.- Cambios en las posiciones atómicas durante la formación de los defectos en la red cristalina
(Vacantes, defectos intersticiales, etc.), transiciones orden-desorden, transformaciones
polimórficas, orientaciones magnéticas (aleatorización de los espines en un material
ferromagnético a medida que es calentado hasta su temperatura de Curie), etc.
38
En la mayoría de los sólidos el modo principal con que se absorbe la energía térmica es mediante el
aumento en la energía vibracional de los átomos, los cuales están vibrando constantemente a
frecuencias muy altas y con amplitudes relativamente pequeñas.
Puede mostrarse que la amplitud de las vibraciones de los átomos, a temperaturas moderadamente
altas, aumenta proporcionalmente a la raíz cuadrada de la temperatura absoluta, es decir:
A ( Amplitud de la vibración) = k1 T
(4.2.7)
Las vibraciones (u oscilaciones) no son independientes unas de otras, sino que las vibraciones de
átomos adyacentes están acopladas en virtud de la ligadura que supone el enlace químico. Estas
vibraciones están coordinadas de tal manera que se producen ondas viajeras u oscilaciones colectivas
que se propagan a través del cristal. Este fenómeno se representa en la figura 4.2.1.
Dichas oscilaciones vienen caracterizadas por su longitud de onda ,λ , su frecuencia, ω, su amplitud A
y su número de onda q , definido por:
2π
q=
(4.2.8)
λ
cada valor de q representa un modo de vibración (en realidad, para cada q tenemos tres modos, uno
longitudinal y dos transversales, ya que cada átomo tiene tres grados de libertad). Estos modos de
vibración producidos por oscilaciones colectivas de los átomos, que son entidades discretas, se pueden
cuantizar, de tal forma que la energía de cada modo está cuantizada, esto es, existe una unidad
cuántica de energía, y dado que los modos son ondas elásticas, de hecho se cuantiza la energía de las
ondas elásticas. Igual que se cuantiza la energía electromagnética y se tienen los fotones, en este caso
los cuantos se conocen con el nombre de fonones.
Así, se puede imaginar que estas ondas son como ondas elásticas o simplemente como ondas de sonido
que se propagan a través del cristal a la velocidad del sonido. La energía térmica vibracional de un
material consiste en una serie de estas ondas elásticas, que tienen un intervalo de distribuciones y
frecuencias. Solamente ciertos valores de energía están permitidos (se dice que la energía está
cuantizada E = nε , n = 1, 2, 3,.... ) y un cuanto de energía vibracional se denomina fonón. (Un fonón es
análogo al cuanto de radiación electromagnética, el fotón). Ocasionalmente, las propias ondas
vibracionales también se denominan fonones.
Una onda de frecuencia
ε = hυ = kBT
υ
tiene un fonón de energía
ε = hυ
donde h es la constante de Planck y si
donde T es la temperatura del material, dicha onda esta térmicamente activada.
Exactamente igual que se puede pensar en una onda electromagnética como un chorro de unas
partículas llamadas fotones, puede hablarse de una onda elástica en un sólido como un chorro de
fonones que transportan la energía y que se desplazan a la velocidad del sonido en ese sólido. De todas
formas, hay que tener presente que se esta tratando con algo físico, con origen en las vibraciones de
los átomos de la red cristalina, de tal forma que, si por ejemplo se aumenta la temperatura, aumentarán
las vibraciones de los átomos, esto es, estaremos creando más fonones, con lo que se esta en un caso
en que el número de partículas no es constante, así, estas «partículas» tan especiales en un sólido son
susceptibles de aumentar o disminuir su número variando la temperatura.
El número de fonones nq que existen en un modo a una temperatura T viene dado por:
1
nq =
hω
e
kBT
(4.2.9)
−1
39
Figura 4.2.1.- Representación esquemática de la generación de ondas de la red en un cristal por medio
de vibraciones atómicas.
Cuando el material se calienta, el movimiento de los átomos o iones en torno a sus posiciones de
equilibrio se estimula como resultado de la absorción de calor. A medida que se incrementa la
temperatura, la amplitud de las oscilaciones atómicas o iónicas va aumentando y al mismo tiempo más
y más ondas vibracionales viajan a través del cristal.
La dispersión térmica de electrones libres durante la conducción electrónica se deben a estas ondas
vibracionales, y estas ondas elásticas también participan en el transporte de energía durante la
conducción térmica.
En el año 1819 los científicos franceses P. Dulong y A. Petit establecieron experimentalmente una ley
de acuerdo con la cual la capacidad calorífica molar de todos los sólidos, a temperaturas
suficientemente altas, es una magnitud constante independiente de la temperatura e igual,
aproximadamente a 3R = 25 J/mol.K , siendo R la constante de los gases perfectos = N Ak B = 8.314
J/mol.K (Figura 4.2.2). Esto significa que cuando un sólido cualquiera se calienta un kelvin, cada uno
de sus átomos absorbe una misma cantidad de energía. N A = Número de Avogadro =6.02 x 10 23
átomos ( o moléculas), y kB = Constante de Boltzmann = 1.38 x 10-23 J/átomos.K, o 8.62 x 10 -5
eV/átomo.K.
La buena coincidencia de los datos experimentales con los teóricos sólo se manifiesta cuando las
temperaturas son lo suficientemente altas. A bajas temperaturas, se observan desviaciones de la ley de
Dulong y Petit y la dependencia de la capacidad calorífica de los sólidos con la temperatura, tiene la
forma que se muestra en la figura 4.2.2.
40
Figura 4.2.2.- Cambio de la capacidad calorífica de varios materiales cerámicos con la temperatura.
La explicación a este hecho puede encontrarse, dentro del marco de la Física Clásica. Sea un sólido
formado por átomos que se encuentran situados en puntos concretos de la red cristalina y supongamos
que estamos a una temperatura determinada, T. Los átomos vibrarán por efecto de la energía térmica,
alrededor de sus posiciones de equilibrio. Clásicamente, se pueden considerar a las fuerzas de enlace
que mantienen la estructura de la red como un conjunto de muelles que mantienen los átomos juntos y
puede aproximarse las interacciones que mantienen la estructura cristalina por interacciones de tipo
oscilador armónico. Cuando el cristal se calienta, los átomos vibran alrededor de sus posiciones de
equilibrio como un conjunto de osciladores armónicos clásicos.
Recordando la ley o teorema de la EQUIPARTICION DE LA ENERGÍA, que establece que a cada
grado de libertad le corresponde una energía igual a:
EGL =
k BT
( k B = = Constante de Boltzmann = 1.3807x10-23 J/K)
2
La ley anterior nos dice que la energía media del sistema, EM , será igual al producto del número de
grados de libertad, N, por k B T/2, es decir:
k T
EM = N B
(4.2.10)
2
Este resultado, correcto para los gases perfectos, puede extenderse a los sistemas de partículas que
interaccionan entre si, si las fuerzas de interacción son armónicas, es decir, cumplen la ley de HOOKE
(F = Kx).
En este caso se puede elegir como modelo un sólido cuyos átomos efectúen vibraciones
(Desplazamientos) en torno a las posiciones de equilibrio en los nudos de la red cristalina, que sean
pequeñas comparadas con la distancia entre los puntos de la red. Además, al átomo se le considera
rígido, con lo que pueden no tenerse en cuenta las vibraciones internas, excitaciones, rotaciones, etc.
41
Cada átomo, independientemente de sus átomos adyacentes, vibra en tres direcciones perpendiculares
entre si, con lo que posee tres grados de libertad de vibración independientes. Ese átomo se puede
comparar con el conjunto de tres osciladores armónicos lineales.
Figura 4.2.3.- Grados de libertad de vibración independientes de un átomo.
Cuando un oscilador vibra se produce la transformación sucesiva de energía cinética en potencial y
k T
viceversa. Como la energía cinética media, ECM , igual a B por grado de libertad, permanece
2
invariable y la energía potencial media , EPM , es exactamente igual a la cinética media, la energía
total media del oscilador, EM , será:
(
)
(
)
EM = ECM 0.5mv 2 + EPM 0.5kx 2 =
k BT k BT
+
= k BT
2
2
(4.2.11)
Si se considera un átomo-gramo (o mol) de material se tendran N A átomos (Constante de Avogadro =
6.023. 10 23 ) y como cada átomo tiene tres grados de libertad de vibración, el número de grados de
libertad serán 3NA y la energía térmica total media, E, será:
E = 3 N A k BT
(4.2.12)
∂E
CV =
= 3 N Ak B = 3R
∂T V
(4.2.13)
De ahí, la capacidad calorífica molar, será:
donde:
R = Constante de los gases perfectos = N A k B = 8.314 J/mol.K.
Resultado importante en el marco de la fisica clásica: El calor específico de un sólido es independiente
de la temperatura a la que se encuentra. Pero, esto es experimentalmente incorrecto.
La buena coincidencia de los datos experimentales con los teóricos sólo se manifiesta cuando las
temperaturas son lo suficientemente altas, incluyendo entre éstas la temperatura ambiente. A bajas
temperaturas, se observan desviaciones de la ley de Dulong y Petit y la dependencia de la capacidad
calorífica de los sólidos con la temperatura, tiene la forma que se muestra en la figura 4.2.2. Para
explicar esta dependencia de la capacidad calorífica con respecto a la temperatura, la teoría clásica
resulta ser ya insuficiente y es necesario recurrir a la estadística cuántica.
42
Einstein propuso el primer paso, dentro de la fisica cuántica, para resolver este problema. La novedad
que propone Einstein frente al modelo clásico consiste en mantener la idea de que los átomos se
comportan como osciladores armónicos independientes, pero suponer que la energía de esos
osciladores está cuantizada.
Se puede probar que la energía media por oscilador es:
ε =
UV hυ
=
+
NV
2
hυ
hυ
e
kBT
(4.2.14)
−1
En general, los 3N osciladores armónicos simples equivalentes no tienen la misma frecuencia. Sea
dNυ el número de osciladores cuya frecuencia se encuentra entre υ y υ + dυ , entonces
dNυ = g (υ )dυ
siendo g (υ ) el número de osciladores por unidad de banda de frecuencias, que ha de determinarse para
un cristal dado o clase de cristales y debe satisfacer la condición
∫ dNυ = ∫ g (υ )dυ = 3N
La energía de N partículas del cristal es:
U=∫
hυ
hυ
g (υ )dυ
ε dNυ = ∫
+ hυ
2
kBT
e
− 1
(4.2.15)
y para esta cantidad de cristal la capacidad calorífica a volumen constante es:
1
kB
2 hυ
hυ
e
T
kBT
∂U
CV =
=∫
2
∂T V
hυ k T
e B − 1
g (υ )dυ
(4.2.16)
En la hipótesis de Einstein los 3N osciladores armónicos equivalentes tienen la misma frecuencia υE
como esquematiza la figura 4.2.4.
Figura 4.2.4.- Espectro de frecuencias de las vibraciones de la red. Aproximación de Einstein
43
Entonces la ecuación (4.2.16) se reduce a la siguiente forma:
2 hυ E
CV = 3 N
1 hυ E
e
k B T
hυE
e kBT − 1
k BT
2
(4.2.17)
Si se define la temperatura característica de Einstein θ E mediante la expresión:
θE =
hυE
(4.2.18)
kB
y se hace N = N A (número de Avogadro), recordando que NAk B = R (constante universal de los gases),
se obtiene:
2
θE
CV θ E
e T
=
2
3R T θ E
e T − 1
(4.2.19)
Este fue el primer intento de aplicar la teoría cuántica al calor específico de los sólidos y, aunque la
hipótesis de igualdad de frecuencias entre todos los osciladores armónicos equivalentes oscilando
independientemente uno del otro está lejos de justificarse, la expresión de Einstein tiene la misma
forma general que las curvas de la figura 4.2.2. Cuando T → ∞ ,
CV
→ 1 , de acuerdo con la regla de
3R
CV
→ 0 , de acuerdo con la experiencia,
3R
exponencialmente, lo cual es más rápido de lo que indica la experiencia.
Dulong y Petit y cuando T → 0 ,
pero tiende a cero
En los sólidos, los átomos no oscilan independientemente unos de otros. La teoría de Debye del calor
específico tiene en cuenta este aspecto.
Si además de considerar los átomos vibrando como osciladores armónicos se supone que no actúan
independientemente unos de otros, estamos en el marco de la teoría de Debye. El movimiento de un
átomo en el sólido afecta al movimiento de todos los demás. Hay que considerar el movimiento de la
red cristalina como un todo, esto es, tenemos que considerar los modos colectivos de la red, es decir
los fonones. Se tiene una primera diferencia con el modelo de Einstein: en este modelo, se suponía una
única frecuencia, υE , mientras que ahora tenemos diferentes modos de vibración, diferentes longitudes
de onda, diferentes energías, diferentes frecuencias, desde un límite inferior, que es υ = 0 , hasta un
límite superior que es υ = υD .
La frecuencia de Debye viene dada por υ D = 3
3N
υ s , siendo υ s la velocidad efectiva del sonido en
4π V
el sólido.
44
Para calcular el calor específico Debye determinó una distribución de frecuencias con la hipótesis de
que un cristal era un medio continuo, soporte, de ondas estacionarias longitudinales y transversales.
Con esta hipótesis demostró la existencia de un espectro continuo de frecuencias, partiendo de cero y
terminando en una frecuencia máxima, υ = υD , según la sencilla relación:
g (υ ) =
9N
υD2
υ2
(4.2.20)
que cumple:
υ
9N
∫ dNυ = ∫ g (υ )dυ = ∫0 D υ 2 υ dυ = 3N
2
D
La aproximación de Debye puede verse en la figura 4.2.5.
Figura 4.2.5.- Espectro de frecuencias de las vibraciones de la red. Aproximación de Debye.
Sustituyendo la aproximación de Debye en la ecuación (4.2.16), se obtiene:
2
υ
CV
=∫ D
0
3 Nk B
hυ
kBT
3υ 2 hυ
e
3
υ D k BT
dυ
2
υ
h
k T
e B − 1
(4.2.21)
Haciendo el cambio de variable en la integral:
x=
hυ
, υ =0 → x =0
k BT
Siendo:
θD =
hυD
kB
y υ = υD → x D =
hυD
kBT
=
la temperatura característica de Debye
θD
T
(4.2.22)
45
Con el cambio de variable y con N = N A la integral queda:
CV
3
=
3
3R θ
D
T
θD
∫0
T
x 4 e x dx
( e x − 1)
(4.2.23)
2
Cuando T → ∞ , el límite superior de la integral es pequeño y el integrando calculado para valores
hυ
2
e x − 1 ≈ x , e x ≈ 1 . En esas condiciones el
pequeños de x, x =
, se puede aproximar por x
k BT
valor de la integral es:
(
θD
∫0
Por tanto,
T
x 4 e x dx
( e x − 1)
2
1θ
≈ D
3 T
)
3
CV
→ 1 , como exige la regla de Dulong y Petit.
3R
Para hallar el limite de
CV
, cuando T → 0 , resulta conveniente realizar una integración por partes,
3R
con lo que:
3
θ D
T
∫
θD
3 0
u = x 4 → du = x 3 dx
x e dx
3
x
e
dx
−
1
=
=
2
3
( e x − 1) dv = ( e x − 1)2 → v = e x − 1 θ D
T
x
4
T
θD
− x4
e x − 1
0
T
+
3
θ D
T
∫
θD
3 0
T
4 x 3 dx
ex −1
Por consiguiente:
4
θ
D
T
CV
3
3
+
==
3 θ D
3
θ
3R
θ D
T
D
− 1 T
T e
θD
∫0
θ
3 D
T
4 x dx
3
= − θ + 4
x
3
e −1
DT
θ D
e
−1
T
3
T
θD
∫0
T
x 3 dx
ex −1
Cuando T → 0 :
3
e
θD
T
→0
θ D
T
−1
y:
θD
∫0
T
x 3 dx
→
ex −1
∞
∫0
x 3 dx
ex −1
Calculando la integral:
∞
∫0
∞ x 3e − x dx
∞ 3 −x
∞ 3 −x
x3dx
−x
−2 x
−3 x
=
=
x
e
1
+
e
+
e
+
e
+
....
dx
=
x e + e−2 x + e−3 x + e−4 x + .... dx
x
−x
∫
∫
∫
0
0
0
e −1
1− e
(
)
(
)
46
y como:
∞ n − ax
∫0
x e
dx =
n!
a n+1
resulta:
∞
∫0
x 3 dx
1
1
π4
1 1
=
3!
+
+
+
+
.............
=
3!
4
4
ex −1
90
34 44
1 2
Por tanto, cuando T → 0 :
CV
3
π 4 4π 4 T
→4
3!
=
3
3R
90
5 θD
θ D
T
3
Luego, la parte inicial de la curva, próxima al cero absoluto, muestra que la capacidad calorifica es
proporcional a T 3 .
Por encima de un determinado punto el resto de la curva puede aproximarse por una expresión de la
forma:
C = a + bT + cT 2 (parabola de eje vertical)
La temperatura de Debye, característica de cada material para muchos materiales sólidos es inferior a
la temperatura ambiente (Tabla 4.2.1).
Tabla 4.2.1.- Temperatura de Debye para algunos materiales sólidos.
47
Se tiene que:
ce =
CC =
∆Q
m∆T
∆Q
m∆T
C
ce = C
PM
CC
∆Q
=
PM
m∆ T
ce =
∆Q
P ∆Q
= M
n∆T
m∆ T
CC = ce PM
( CC = ce PA )
(4.2.7)
Como:
C C = 25 J/atg.K
y además:
CC = ce PA
ce PA = 25 5 J/atg.K (4.2.8)
resulta :
siendo P A el peso atómico del elemento considerado .
PM
ce
x+ y
Para un óxido de estequiometría MeyOx se tiene que:
= 25 J/mol.K
(4.2.9)
siendo PM el peso molecular del óxido considerado.
Si se toman los óxidos MgO, SiO2 , Al2O3 se tiene:
COMPUESTO PESO MOLECULAR
PM
MgO
SiO2
40
60
PM
x+ y
≈ 20
≈ 20
Al2O3
102
≈ 20
Por lo que, los calores específicos,
ce
, de estos tres óxidos deberán ser muy semejantes teniendo en
cuenta la expresión (4.2.9) e iguales a 1.25 J
.
g.º C
Los valores del calor específico medio ce ]20 ºC , para los materiales refractarios de sílice, alta alúmina y
magnesia son los siguientes:
T
Refractarios de sílice
(25-1100 ºC): ce ]25º C = 1.17 J
Refractarios de alta alúmina
(25-1100 ºC): ce ]25º C = 1.09 J
g.º C
Refractarios de magnesia
1100
g.º C
1100
(25-1100 ºC): ce ]25º C = 1.38
1100
J
g.º C
Que aunque son valores ligeramente diferentes, coinciden básicamente con los valores calculados
mediante la expresión (4.2.7).
48
La tabla 4.2.1 indica los valores del calor especifico de varios materiales, así como el de otras
propiedades térmicas.
Tabla 4.2.1.- Propiedades térmicas de varios materiales.
4.3.- Dilatación térmica.
Todos (o la mayoría) de los materiales sólidos experimentan variaciones dimensionales (Dilatación o
contracción ) por efecto de la temperatura, así se expanden cuando son calentados y se contraen
cuando son enfriados. Aunque estos cambios suelen ser pequeños no por ello dejan de ser importantes,
sobre todo si se quiere utilizar materiales distintos en una unión.
Los fenómenos que dan lugar a la variación de dimensiones con la variación de la temperatura son:
1.- Dilatación térmica reversible (Coeficiente α), que es una característica intrínseca del material
relacionada con la energía del enlace químico.
2.- Cambios polimórficos, correspondientes a transformaciones de fase con variación de volumen
(∆V). Pueden ser reversibles o irreversibles.
49
3.- Sinterización, durante la cual se pueden producir reordenaciones, crecimiento de granos,
nucleación de poros y densificación.
4.- Reacciones invariantes, tales como cristalizaciones, disoluciones y exoluciones y fusiones.
El cambio de longitud con la temperatura para un material sólido puede expresarse de la manera
siguiente:
L f − Lo
Lo
= α l (T f − To )
o bien :
∆L
= α l ∆T
Lo
(4.3.1)
representan, respectivamente, las longitudes iniciales y finales al cambiar la
donde Lo y Lf
temperatura desde T o a T f: El parámetro α l se denomina coeficiente lineal de dilatación térmica y es
independiente de la longitud. Es una propiedad que indica el grado de dilatación de un material cuando
es calentado y tiene unidades del recíproco de la temperatura [(°C)-1]. Desde luego, el calentamiento o
el enfriamiento afecta a todas las dimensiones del cuerpo lo cual produce un cambio de volumen. Los
cambios de volumen con la temperatura pueden calcularse a partir de:
∆V
= α v ∆T
Vo
(4.3.2)
donde, ∆V y V o son el cambio de volumen y el volumen inicial, respectivamente, y αv simboliza el
coeficiente de volumen de la dilatación térmica. En muchos materiales, el valor de αv, es anisotrópico,
es decir, depende de la dirección cristalográfica a lo largo de la cual es medido. Para los materiales
isotrópicos, αv, es aproximadamente igual a 3αl.
Desde el punto de vista atómico, la dilatación térmica se refleja en un aumento en la distancia media
de separación entre los átomos. Este fenómeno se entiende mejor consultando la curva de energía
potencial enlace frente a la separación interatómica para un material sólido, que se reproduce en la
figura 4.3.1. La curva tiene forma de un pozo de energía potencial, y la distancia interatómica de equilibrio, ro, corresponde al mínimo del pozo.
Si se observa la figura 4.3.1, que nos da la variación de la energía de enlace ( ET ) con la separación
interatómica, se deduce un incremento de la temperatura ( ∆T ) se traduce en un suministro de energía
al enlace químico ( ∆E ) , que da lugar a un incremento ( ∆R ) de las vibraciones atómicas alrededor de
la posición media ( R0 ) , debido a la agitación térmica de los átomos situados en los nudos de la red
cristalina.
En dicha figura también se dan la energía de repulsión ( ER ) y la de atracción ( E A ) , observándose que
el término de repulsión cambia más rápidamente que el de atracción al aumentar la separación
interatómica.
Calentando sucesivamente a temperaturas más altas (T 1 , T 2 , T3 , etc.) aumenta la energía vibracional
desde E l hasta E 2 y E 3 , y así sucesivamente. La amplitud media de la energía vibracional de un átomo
corresponde a la anchura del pozo a cada temperatura y el espaciado interatómico se representa por la
posición media, la cual aumenta con la temperatura desde r0 a r1 y r2 y así sucesivamente.
La dilatación térmica se debe realmente a la asimetría de la curva de este pozo de energía potencial,
más que al aumento de las amplitudes de vibración con la temperatura. Si la curva de energía potencial
50
fuera simétrica con respecto a la vertical que pasa por el mínimo (Figura 4.3.1), no existiría un
cambio neto en la separación interatómica y, en consecuencia, no existiría dilatación térmica.
Figura 4.3.1.- Variación de la energía de enlace ( ET ) con la separación interatómica
Gráfico de la energía potencial frente a la distancia interatómica, mostrando el aumento en la separación interatómica al aumentar la temperatura. Al calentar, la separación interatómica aumenta desde
r0 a r1 , y de aquí a r2 y así sucesivamente. (b) Para una curva simétrica energía potencial-separación
interatómica, no hay aumento en la separación interatómica al aumentar la temperatura (es decir, rl = r2
= r3 ).
Considerando el efecto que sobre la energía potencial de separación media entre dos átomos, a la
temperatura T, tienen los términos anarmónicos. La utilización de estos términos (dependencia del
potencial con potencias del desplazamiento atómico superiores a dos) se hace necesaria, como veremos
a continuación.
51
Supongamos dos átomos vecinos de un sólido, entre los que existe una interacción elástica, F=Kx,
siendo x el desplazamiento de un átomo de la posición de equilibrio x 0 . La energía potencial del
sistema será:
x2
U ( x) = −U 0 + K
(4.3.3)
2
que corresponde a una parábola.
Los dos átomos vibran con energía térmica, de manera que la distancia entre ellos varía de Ai a B i ,
con un valor medio x 0 que es independiente de la amplitud de vibración [es decir, de la temperatura,
figura 4.3.2.a], por lo que las dimensiones del sólido no se alterarán y en consecuencia no existirá
dilatación. De manera que nos vemos forzados a considerar que la fuerza de interacción no es
puramente elástica por lo que debemos introducir términos anarmónicos de segundo orden y
superiores.
Si suponemos una asimetría en las interacciones, por ejemplo que la fuerza de repulsión crece con
mayor rapidez al disminuir x que lo hace la fuerza de atracción al aumentar x, los átomos oscilarán
ahora de tal manera que la distancia entre ellos varía entre las posiciones A 'i a B ' i , que ya no son
simétricas con respecto a x 0 sino que tienen un valor medio xi que aumenta con la temperatura
[Figura 4.3.2.b]. En consecuencia, el sólido se dilata. La falta de simetría en la energía potencial y la
dilatación consiguiente del sólido se pueden explicar con un término de la forma gx 3 . Además, puede
existir una fuerza de amortiguamiento general para valores elevados del desplazamiento, que se puede
representar por el término fx 4 . La expresión de la energía potencial será ahora:
U ( x) = −U 0 + cx 2 − gx3 + fx 4
(4.3.4)
siendo c, f, g todos positivos.
Figura 4.3.2.- Dependencia de la energía potencial de interacción con el desplazamiento, teniendo en
cuenta: (a) solamente el término armónico; (b) los términos anarmónicos de menor orden. T1 < T2 < T3
El desplazamiento medio principal puede calcularse mediante la estadística de Boltzmann. La
probabilidad de que el átomo se desvíe en una distancia x de la posición de equilibrio es:
P [ X = x ] = Ae
U ( x)
−
k BT
(4.3.5)
y como:
∞
∞
∫−∞ P [ X = x ] dx = ∫−∞ Ae
U ( x)
−
kBT
dx = A∫
∞
−∞
U ( x)
−
k T
e B dx
=1
52
1
A=
resulta:
∞
∫−∞ e
U ( x)
−
kBT
U ( x)
−
k T
e B
P [ X = x] =
luego
∞
∫−∞ e
dx
U ( x)
−
kBT
(4.4)
dx
y el valor medio del desplazamiento se expresa por:
∞
x = E ( x) = ∫
∞
−∞
xP [ X = x ] dx =
∫−∞
∞
U ( x)
−
k T
xe B dx
∫−∞
Para un potencial armónico,
(4.3.7)
U ( x)
−
k T
e B dx
x = 0 , como ya se señalaba anteriormente, ya que:
2
− cx
k T
x n e B dx
∞
∫−∞
=0
para cualquier valor de n que sea impar.
Para el potencial anarmónico, si suponemos que la desviación de x es pequeña, podemos aproximar el
denominador por:
∞
∫−∞
U ( x)
−
k T
e B dx
≈∫
∞
−∞
2
− cx
k T
e B dx
π k BT
=
c
y para el numerador:
−
xe
U ( x)
k BT
−
= xe
cx2 − gx3
k BT
=
2 gx3
− cx
k BT k BT
xe
e
=
2
− cx
k BT
xe
g 3
x
1 +
k BT
por tanto,
∞
x = E ( x) = ∫
∞
−∞
∫ xe
xP [ X = x ] dx = −∞
∞
∫−∞
U ( x)
−
kBT
∞
dx
U ( x)
−
k T
e B dx
=
∫−∞
∞
2
− cx
k T
xe B
∫−∞
2
− cx
k T
e B
g 3
1 + k T x dx
B
=
g 3
1
+
k T x dx
B
cx2
g 4 − kBT
∫−∞ kBT x e dx
∞
∞
∫−∞
2
− cx
k T
e B dx
y teniendo en cuenta que:
∞
g
∫−∞ kBT
2
− cx
k
T
x 4 e B dx
3 g ( k BT )
=
5
4
c 2
3
2
π
resulta, finalmente:
x=
3g
kBT
4c2
(4.3.8)
Por lo que, teniendo en cuenta los términos inarmónicos en la formula de la energía potencial de
enlace, cuando se eleva la temperatura aumenta no solo la amplitud de la vibración de los átomos, sino
también las distancias medias entre ellos, lo cual ocasiona la dilatación del sólido.
53
El coeficiente de dilatación lineal vendrá dado por:
α=
1 d x 1 3 gk B
=
x0 dT x0 4c 2
(4.3.9)
es decir, es proporcional al coeficiente de inarmonía, g.
El tanto por ciento de dilatación (o de contracción) puede expresarse en función del coeficiente lineal
de dilatación térmica, así:
∆L
(% expansión)T → To =
100 = 100 α T →To ∆T
Lo
o bien :
(%.. exp ansión) T →To
α T →T o =
(4.3.10)
100∆T
En las figuras 4.3.3 y 4.3.4 se da el tanto por ciento de expansión frente a la temperatura de diversos
materiales metálicos, cerámicos y orgánicos.
Figura 4.3.3.- Expansión térmica lineal de metales, polímeros y cerámicas policristalinas típicos.
54
Figura 4.3.4.- Expansión térmica lineal de diversos materiales.
55
Por su parte, en la figura 4.3.5 se indican las dilataciones lineales reversibles de algunos materiales
refractarios. Se puede observar que la curva de dilatación de la mayor parte de ellos es más o menos
rectilinea, aun cuando se diferencian mucho los valores totales entre si. Los refractarios de sílice hasta
una temperatura de 650 ºC experimentan una gran dilatación y después se mantiene constante, lo que
pone de manifiesto un comportamiento irregular, que se debe a la existencia de transformaciones
polimórficas de la sílice con la temperatura y con variación de volumen.
Por modificación de la estructura o por cocción puede variarse dentro de ciertos límites el transcurso
de la curva de dilatación. Los ladrillos con dilatación especialmente amplia, como son los ladrillos de
magnesia o los especialmente irregulares en una determinada zona de temperatura como los ladrillos
de sílice, son muy sensibles a los cambios de temperatura. La dilatación térmica tiene mucha
importancia en la práctica ya que para los revestimientos de grandes instalaciones se tienen que
calcular las compensaciones por dilatación. De lo contrario son de esperar presiones en los bordes y
roturas anticipadas de las cabezas de ladrillos, que se culpan con frecuencia inciertamente de
resistencia insuficiente a los cambios bruscos de temperatura.
Figura 4.3.5.- Dilatación térmica de ladrillos refractarios, 1 magnesia, 2 cromo magnesia, 3 cromita,
4 sílice, 5 óxido de circonio, 6 corindón 99, 7 corindón 90, 8 chamota, 9 silimanita,
10 circonio, 11 carburo de silicio
Para cada clase de materiales (metales, cerámicas y polímeros), cuanto mayor es la energía del enlace
interatómico, más profundo, y estrecho es el pozo de energía potencial. Por consiguiente, el aumento
en la separación interatómica debido a un determinado aumento de temperatura será menor y tendrá un
valor de αl menor. Otro factor que influye sobre el valor de αl es el la disposición o empaquetamiento
de los átomos en la estructura, que cuanto mayor sea mayor es el valor del coeficiente de dilatación
térmica, pues la acumulación de las separaciones es mayor.
56
La utilidad de la información suministrada por los estudios dilatométricos es importante:
1.- En la fabricación de los materiales refractarios.
- Curvas de secado y cocción.
- Sinterización
2.- En la utilización de los materiales refractarios.
- Previsión de cambios dimensionales y formas.
- Diseño de estructuras o mamposterías refractarias
- Tensiones termomecánicas en el interior de piezas de materiales compuestos (polifásicos)
- Fenómenos de fatiga termomecánica en sistemas anisotrópicos
- Respuestas a los choques térmicos asociadas a expansiones y contracciones.
- Comportamiento ante los ciclos térmicos
- Resistencia al desconchado (spalling)
- Tensiones entre elementos del revestimiento refractario
- Calculo de juntas de dilatación adecuadas, para que no queden abiertas lo que daria lugar a un
aflojamiento de la mampostería y se producirian fugas o para que no se aprieten produciendo cargas de
presión que pueden causar roturas.
- Postcontracción
- Estudios de gradientes y flujos térmicos
- Diseño de moldes de colado
- Densificación de refractarios aislantes.
La tabla 4.2.1 indica los coeficientes lineales de dilatación térmica de varios materiales.
Metales.
Tal como se establece en la tabla 4.2.1, los coeficientes lineales de dilatación térmica de los metales
más comunes están entre 5 x 10-6 y 25 x 10 -6 (°C)-1 . En algunas aplicaciones es necesario un alto
grado de estabilidad dimensional con respecto a las fluctuaciones de temperatura. Esto ha dado lugar
al desarrollo de una familia de aleaciones hierro-níquel y hierro-cobalto que tienen valores de al del
orden de 1 x 10 -6 (°C)-1 . Una de estas aleaciones ha sido desarrollada de manera, que tuviera el mismo
coeficiente de dilatación que el vidrio Pirex, de esta manera se evitan las tensiones térmicas y la rotura en la unión cuando está unida con Pyrex y es sometida a variaciones de temperatura.
Cerámicas.
En muchos materiales cerámicos los enlaces son relativamente fuertes, como se refleja en los
coeficientes de dilatación relativamente bajos; los valores se encuentran típicamente en el intervalo
entre 0.5 x 10 -6 y 15 x 10 -6 (°C)-1 . En el caso de cerámicas no cristalinas y también aquellas con
estructura cristalina cúbica, al es isotrópico. En los vidrios inorgánicos el coeficiente de dilatación
depende de la composición. La silice vítrea (vidrio de SiO2 de alta pureza) tiene un coeficiente de
dilatación pequeño, 0.5 x 10-6 (°C)-1 . Esto se explica debido a una densidad de empaquetamiento
pequeña de manera que el cambio en la distancia interatómica produce un pequeño cambio
dimensional macroscópico. Añadiendo impurezas a la sílice vítrea se aumenta el coeficiente de
dilatación.
Los materiales cerámicos sometidos a cambios de temperatura deben tener coeficientes de dilatación
térmica relativamente bajos y, además, deben, ser isotrópicos. En caso contrario, estos materiales
frágiles pueden experimentar fractura como consecuencia de los cambios dimensionales no uniformes,
lo cual se denomina choque térmico.
57
Polímeros.
Algunos materiales polímeros experimentan dilataciones térmicas muy elevadas al ser calentados tal
como es de esperar por los altos coeficientes de dilatación que van desde aproximadamente 50 x 10-6
hasta 300 x 10 -6 (°C)-1. Los valores más altos de al se encuentran en los polímeros lineales y ramificados debido a que los enlaces intermoleculares son débiles y el entrecruzado es mínimo. Al aumentar
el entrecruzamiento, la magnitud del coeficiente de dilatación disminuye. Los coeficientes menores se
encuentran en los polímeros termoestables tales como la baquelita, en donde el enlace es casi completamente covalente.
Expansión térmica de materiales compuestos.
Cuando un material compuesto, mezcla de varias fases cristalinas o de fases cristalinas y fase vítrea se
calienta a la temperatura de cocción se forma una estructura coherente densa (DENSIFICACION)
como resultado de flujos viscosos, difusión a solución y precipitación.
Si los coeficientes de dilatación térmica lineal en las diferentes direcciones cristalinas de los cristales
individuales no son iguales, es decir α a ≠ α b ≠ α c ≠ ...... , o si las fases presentes tienen diferentes
coeficientes de dilatación térmica lineal α1 ≠ α 2 ≠ α 3 ≠ ...... , entonces durante el calentamiento o el
enfriamiento pueden aparecer grietas debidas a las tensiones existentes entre cada grano y los que le
rodean, ya que tienen expansiones o contracciones diferentes. En el caso del enfriamiento hay
diferentes contracciones entre los granos y pueden llegar a separarse dando lugar a que ocurra una
contracción libre de tensiones.
En la práctica, sin embargo cada grano esta “sujetado” por los que le rodean y no tiene lugar la
separación de los granos, desarrollándose microtensiones que son proporcionales a la diferencia entre
la contracción o expansión libre de tensiones y la contracción o expansión real. Como consecuencia la
variación de volumen, ∆V , observada no es función directa de los ∆Vi , individuales.
El coeficiente de dilatación térmica lineal de un material compuesto puede calcularse si se asume que
no se desarrollan grietas o fisuras y que la contracción o expansión de cada grano es la misma que la
contracción o expansión global y que todas las microtensiones existentes son compresiones o tensiones
hidrostáticas puras, por lo que se supone que la cortadura superficial es despreciable.
La deformación unitaria de volumen del grano i debida al cambio de dimensiones global de la pieza
viene dada por:
∆Vi
(4.3.11)
= γ r ∆T
V
i r
donde:
Vi = Volumen inicial del grano i
γ r = Coeficiente de expansión volumétrico global
∆T = Cambio de temperatura
Por su parte, la deformación unitaria de volumen del grano i debida al cambio de dimensiones de el
mismo viene dada por:
∆Vi'
(4.3.12)
= γ i ∆T
Vi i
donde:
γ i = Coeficiente de expansión volumétrico global
58
Por tanto, la deformación unitaria de volumen del grano i debida a la presión isotrópica que se genera
es:
∆V
∆Vi ∆Vi'
= ( γ r − γ i ) ∆T
=
−
Vi d Vi r Vi i
(4.3.13)
Suponiendo que se verifica la ley fundamental de la elasticidad, que nos dice que el esfuerzo unitario
es proporcional a la deformación unitaria, en nuestro caso se tiene:
P = −K
∆V
V
(4.3.14)
Pues el esfuerzo unitario es la presión isotrópica de compresión o de tensión, P y la deformación
∆V
unitaria es la deformación unitaria de volumen, es decir
. La constante de proporcionalidad, K, es
V
el coeficiente de compresibilidad
o módulo de elasticidad volumetrico que es igual a
P
E
K =−
=
.
∆V
3(1 − 2 µ )
V
Sustituyendo (4.3.13) en (4.3.14) y llamando P = σ i y K = Ki se tiene:
σ i = − Ki ( γ r − γ i ) ∆T
(4.3.15)
Durante el enfriamiento el grano i estara sujetado por los circundantes (tracción) si se cumple que
γ r < γ i , mientras lo comprimirán en caso contrario, es decir si γ r > γ i (Figura 4.4)
Figura 4.4.- Enfriamiento de un grano con movimiento restringido en un material compuesto.
Durante el calentamiento ocurre lo contrario (Figura 4.3.7).
59
Figura 4.3.7.- Calentamiento de un grano con movimiento restringido en un material compuesto.
Si la tensión o compresión no es lo suficientemente grande en ninguna parte de la pieza, como para
producir la rotura la suma de tensiones en un volumen, Vr ha de ser nula. Por tanto, si V1 , V2 , V3 ,.... son
las fracciones volumétricas de cada uno de los materiales distintos que componen el material
compuesto se tiene:
V1K1 ( γ r − γ 1 ) ∆T + V2 K 2 ( γ r − γ 2 ) ∆T + V3 K 3 ( γ r − γ 3 ) ∆T + ...... + Vi Ki ( γ r − γ i ) ∆T + ....... = 0
(4.3.16)
cumpliéndose:
V1 + V2 + V3 + ...... + Vi + ....... = Vr
y
Vi =
Fi ρ rVr
(4.3.17)
ρi
siendo:
Fi =
ρiVi
= Fracción en peso de la fase i
ρrVr
ρi = Densidad de la fase i
ρ r = Densidad global
Sustituyendo (4.3.17) en (4.3.17) se tiene:
K1 ( γ r − γ 1 ) ∆T
F1ρ rVr
ρ1
+ V2 K 2 ( γ r − γ 2 ) ∆T
F2 ρ rVr
ρ2
+ ...... + Ki ( γ r − γ i ) ∆T
Fi ρ rVr
ρi
+ ....... = 0
(4.3.18)
operando:
F1
ρ1
γ r K1
+ K2
F2
ρ2
+ .... + Ki
γ F
γ F
γF
+ .... − K1 1 1 + K 2 2 2 + .... + Ki i i + .... = 0
ρi
ρ1
ρ2
ρi
Fi
luego:
K1
γr =
γ 1F1
γ F
γF
+ K 2 2 2 + .... + K i i i + ....
ρ1
ρ2
ρi
K1
F1
ρ1
+ K2
F2
ρ2
+ .... + Ki
Fi
ρi
+ ...
=
∑i Ki
γ i Fi
ρi
Fi
∑i Ki ρ
(4.3.19)
i
60
4.4.- Refractariedad. Resistencia piroscópica.
La resistencia térmica o refractariedad de un material está ligada a su punto de fusión.
Sólo los compuestos puros tienen un punto de fusión verdadero definido. Para un compuesto puro el
punto de fusión es la temperatura a la cual se verifica el cambio de fase o la transformación del estado
sólido al líquido de un determinado constituyente (SOLIDO ⇔ LIQUIDO). La temperatura durante el
cambio de estado no varía, pues aplicando la regla de las fases:
F+L=C+2
y si se fija la presión:
F + L = C + 1 entonces como C = 1 y F = 2 resulta que L = 0.
Los materiales refractarios, salvo algunos casos, no son compuestos puros, y en realidad presentan una
ZONA DE REBLANDECIMENTO, por lo que ambos términos no deberían utilizarse
indiscriminadamente. Cabe más bien hablar de punto de reblandeciniento, fluencia plástica o, a lo
sumo, de punto medio de fusión ya que ésta es siempre gradual al ser diferente para los diversos compuestos que integran el material. El reblandecimiento es más significativo que el punto de fusión
verdadero, ya que un material es de relativo valor refractario si se deforma a partir de 1500 ºC, aunque
la fusión completa no se produzca hasta que se alcancen los 1700 ºC.
E1 reblandecimiento es debido a que determinados componentes (generalmente en la fase vítrea )
funden antes que otros, formando con los no fundidos una masa plástica que se deforma por su propio
peso o por una carga aplicada. E1 fenómeno depende, pues, de factores tales como la proporción
sólido-líquido (los diagramas de equilibrio entre fases proporcionarán una valiosa información al
respecto ), la viscosidad del líquido que se forma, el tamaño de los cristales, etc.
Por el hecho de influir en la respuesta del material factores extrínsecos cono la velocidad de
calentamiento, dimensión y forma de la nuestra, atmósfera del horno, etc., se hace necesario en la
práctica recurrir a ensayos normalizados para determinar esta propiedad.
A pesar de la existencia de otras técnicas más modernas, para determinar esta propiedad se sigue
utilizando uno de los métodos más antiguos (SEGER, 1886), conocido como conos pirométricos
equivalentes (CPE). Está basado en la comparación de las características de comportamiento de
pandeo de probetas cónicas o tetraedricas con elementos pirométricos patrón de idénticas dimensiones
y forma (cono pirométrico equívalente ó C.P.E., referido a conos Seger).
El material a ensayar (cortado o moldeado en forma de cono o de pirámide rectangular) se dispone
sobre un ladrillo refractario de alta alúmina y se fija al mismo mediante un cemento aluminoso.
Conjuntamente se disponen sobre la base refractaria de alta alúmina una serie de conos pirométricos
entre los cuales se sospecha que pudiera encontrarse el material ensayado.
Las probetas y los conos pirométricos estarán fijados de tal forma que el ángulo formado con la
vertical por la arista o la cara opuesta, según el caso, (la cara o la arista de los conos debe estar
inclinada hacia afuera en la misma posición que la utilizada por el fabricante para el contraste de los
conos patrón), sea de 8 ± 1 º (Ver figuras 4.4.1 y 4.4.2 ). El conjunto será secado.
Los conos pirométricos a utilizar serán seleccionados de la siguiente forma: Además del cono
pirométrico (o del par de conos) cuyo número corresponde a la refractariedad probable del material,
serán elegidos dos conos pirométricos del número inmediatamente inferior y superior; el número total
de conos pirométricos será cuatro o seis.
61
Figura 4.4.1.- Cono pirométrico.
Figura 4.4.2.- Ejemplos de disposición de los conos pirométricos y de la probeta de muestra.
El soporte con los conos y las probetas se introducirá en el horno y estará colocado en la zona donde la
temperatura es uniforme (Figura 4.4.3). Se elevará la temperatura hasta unos 200 ºC por debajo de la
probable refractariedad del material en una hora y media óodos horas. Después de lo cual , la
velocidad de subida de la temperatura será a una media constante é igual a 2.5 ºC por minuto, de forma
que en todo momento la diferencia entre la temperatura real y la curva teórica de subida sea inferior a
10 ºC. Esta velocidad de 2.5 ºC por minuto corresponderá a un intervalo de tiempo de casi ocho
minutos entre las caidas de dos conos pirométricos consecutivos. E1 calentamiento se detiene tan
pronto como la punta de una de las probetas toma contacto con el soporte.
Figura 4.4.3. - Horno para 1a determinación de la temperatura de reblandecimiento.
62
Al ser sometidos a un calentamiento con velocidad controlada se observa que conforme aumenta la
temperatura alguno de los conos comienza a reblandecer doblando su vértice hasta llegar a tocar la
base aluminosa transformándose posteriormente en una masa viscosa informe, debido al aumento de la
proporción de la fase líquida. En la figura 4.4.4 puede verse el diferente comportamiento de los conos
refractarios durante el calentamiento, siendo el correcto el mostrado en la figura (a).
Figura 4.4.4.- Diferente comportamiento de los conos refractarios durante el calentamiento
En el momento que el cono a ensayar se ha doblado hasta hacer tocar su vértice con la base puede
decirse que la experiencia ha finalizado y la temperatura a la cual tiene lugar sería una medida de la
refractariedad del material (Figura 4.4.5)
Figura 4.4.5.- Conos Seger después del calentamiento
El soporte se retirará del horno y se anotará el número del como pirométrico que haya caido de la
misma manera que cada una de las probetas o los números de los dos conos pirométricos que se
inclinaron un poco más y un poco menos que estas probetas. El ensayo se repetirá si una de las
probetas o de los conos pirométricos no se inclinan normalmente o si la diferencia de caida de las dos
probetas es superior a la mitad de un número de cono pirométrico.
El índice de resistencia piroscópica se expresará por el número del cono o de los conos pirométricos
definidos en la tabla 4.4.1 y por las temperaturas, en grados centígrados, correspondientes a los
mismos. En la tabla 4.4.2 se da la composición química de los conos Seger.
Se anotará el origen de los conos pirométricos, así como el modo de preparación de la probeta (cortada
o moldeada).
Ejemplo: 32 (Seger). 1710 º C (probeta cortada).
En el caso de ensayos repetidos, serán anotados todos los resultados y no sólo su media.
63
Tabla 4.4.1.- Conos Seger.
64
Tabla 4.4.3.- Composición química de los conos Seger.
65
En la tabla 4.4.3 la serie de conos Orton.
Tabla 4.4.3.- Conos Orton.
66
La temperatura de reblandecimiento determinada a partir de los conos pirométricos es una función de
la forma y tamaño del cono, de la velocidad de calentamiento y de la atmósfera del horno.
A mayor tamaño de cono la temperatura de reblandecimiento disminuye y mayor velocidad de
calentamiento aumenta.
Los conos de ensayo que se encuentren sometidos a una atmósfera reductora raras veces se doblan de
un modo suave (el punto de reblandecimiento de alúminas de alta calidad está poco influenciado por
las características de la atmósfera del horno, sin embargo, la presencia de óxido de hierro provoca un
marcado efecto sobre el ablandamiento del cono).
Debe de tomarse únicamente como temperatura de reblandecimiento el momento en que el cono
ensayado cae gradualmente hasta que la punta toca su base tal y como ocurre en la situación de la
figura 4.4.4.a.
Cuando un cono inclina su base (Figura 4.4.4.b) es probable que exista una interacción entre el cono y
la placa que lo sustenta. Por otra parte, algunos materiales, no adoptarán posiciones definidas durante
el ensayo sino que se derrumbaran o hincharan (Figuras 4.4.4.c y 4.4.4.d).
4.5.- Aislamiento térmico. Conductividad térmica.
El objetivo principal del aislamiento térmico en los equipos que trabajan a alta temperatura es:
- Ahorrar energía, minimizando las pérdidas a traves de las paredes
- Proteger al individuo, al hábitat y al medio ambiente
La conductividad térmica es una propiedad muy importante a la hora de elegir el material más
adecuado desde el punto de vista de aislamiento térmico. En general, en los materiales refractarios, y
especialmente en los aislantes, se requiere una baja conductividad térmica al objeto de minimizar las
pérdidas de calor por las paredes de los hornos industriales, etc. La transmisión de calor a través de un
material es un fenómeno de transporte complejo, debido a que al ser un sólido poroso intervienen en
él, en mayor o menor grado, los tres mecanismos de transmisión de calor:
- CONDUCCION (En el sólido y en el gas encerrado en los poros)
- CONVECCION (En el gas).
- RADIACION (En el gas)
En la figura 2.3.4.1 pueden verse esquematizados los tres mecanismos anteriores, así como los factores
más importantes que influyen sobre ellos.
67
Figura 4.5.1.- Transmisión de calor en los materiales conformados que presentan porosidad
La ley fenomenológica que rige la conducción del calor fue propuesta por el físico y matemático
francés J. B. FOURIER. Se expondrá dicha ley con ayuda del sencillo problema del flujo
unidimensional de calor a través de una pared plana (por ejemplo, una capa de aislante). La figura
4.5.2 muestra una pared plana de área A y espesor L, cuya cara en x = 0 se mantiene a la temperatura
T 1 , mientras que el lado en x = L se mantiene a T2 (T 1 > T 2 )El flujo de calor Q a través de la pared se
efectúa en la dirección de la disminución de la temperatura.
68
La ley de Fourier establece que, la densidad de flujo de calor ,q, (Cantidad de calor que atraviesa la
unidad de superficie en la unidad de tiempo , [W/m2],) viene dada por :
•
Q
dT
= q = −k
A
dx
(4.5.1)
donde : T es la temperatura local [K o °C] , x es la coordenada en la dirección del flujo [m] y k es la
conductividad térmica del material, cuyas unidades [W/m. K].
El signo menos en el segundo miembro de la expresión (4.5.1) se debe a que el calor fluye en el
sentido contrario al del gradiente de temperatura, es decir, desde las regiones más calientes a las más
frías. Como se ve, la conductividad térmica es un fenómeno de no equilibrio que precisa de la
existencia de un gradiente de temperatura. Cuando dT/dx es negativo, el signo menos en la ecuación
(4.5.1) da un valor positivo de q en la dirección de las x positivas.
Figura 4.5.2.- Conducción Unidimensional estacionaria a través de una pared plana.
La conductividad térmica es un parámetro que depende del tipo de material (depende de manera
crucial de su estructura microscópica) y de la temperatura y representa la cantidad de calor conducido
por unidad de tiempo a través de la unidad de área (Perpendicular a la dirección del transporte de
calor) cuando el gradiente de temperatura a través del elemento conductor del calor es la unidad. La
tabla 2.3.3.1 da los valores de la conductividad térmica de varios materiales.
Reordenando e integrando la ecuación (4.5.1) sobre el espesor de la pared, se tiene :
L
T2
q ∫ dx = − ∫ kdT
0
T1
donde q y A se han sacado de la integral porque son constantes. Si ignoramos la variación de k con la
temperatura, obtenemos :
q=
k
T −T T −T
∆T
(T1 − T2 ) = 1 2 = 1 2 =
L
L
Rter
Rter
k
(4.5.2)
69
La comparación de la ecuación (4.5.2) con la ley de Ohm, I = V/R, sugiere que ∆T = T1 - T 2 puede
verse como un potencial impulsor del flujo de calor, así como el voltaje es el potencial impulsor de la
corriente eléctrica. Entonces R t = L/k puede considerarse como una resistencia térmica análoga a la
resistencia eléctrica.
La energía en forma calorífica se puede transmitir en un cristal mediante el movimiento de fonones,
fotones, electrones, huecos, pares electrón-hueco y/o excitones.
En un metal la mayor parte de la energía la transportan los electrones, aunque en metales con muchas
impurezas la contribución de la red puede ser importante, pero en los no metales son las vibraciones de
la red las responsables de la conductividad térmica, salvo a temperaturas muy elevadas a las que los
fotones son dominantes.
Debye, en 1914, fue el primero en desarrollar una teoría sobre la conductividad térmica de los
aislantes y, como en su teoría de la capacidad calorífica, supuso que las vibraciones reticulares podían
describirse mediante un modelo continuo y elástico. Pero puesto que los sólidos se dilatan al calentarse
y además el valor de la conductividad térmica es finito, supuso que el movimiento debía ser
anarmónico y que era esta anarmonicidad la responsable del acoplamiento entre los modos y tambien
de su difusión.
La cantidad de calor transferido mediante el mecanismo de transporte de calor por conducción, bajo la
influencia de un gradiente de temperatura, viene controlada por los siguientes factores:
1.- Concentración o cantidad de energía presente por unidad de volumen.
2.- Naturaleza de portador de calor en el material (Fonones, electrones,etc) y su velocidad de
movimiento.
3.- Cantidad de calor disipado.
La cantidad de energía presente es función de la capacidad calorifica del material por unidad de
volumen, c y la cantidad de calor disipado es función de los efectos de dispersión y puede pensarse en
términos de la distancia de atenuación para las ondas de red, expresada como recorrido libre medio.
Consideremos el caso de un sólido.La densidad de flujo de partículas en la dirección x:
Φ px =
1
n vx
2
(4.5.3)
siendo n la concentración de partículas (Partículas/cm 3 ) y vx la velocidad media de las mismas en
la dirección x (cm/s) . En el equilibrio tiene que existir una densidad de flujo de igual magnitud y
sentido opuesto.
J
Si se denota por c la capacidad calorífica de una partícula
, que se traslada de una región
Particula.K
de temperatura T + ∆T a otra de temperatura T, la partícula cederá una energía:
Eu = c∆T
(4.5.4)
Por otra parte, entre los extremos de un recorrido libre medio de la particula se tiene:
∆T =
dT
dT
l x = {lx = vx τ } =
vx τ
dx
dx
(4.5.5)
Siendo τ el tiempo entre colisiones.
70
El flujo total de energía es (contando ambos sentidos del flujo de particulas, figura 4.5.3) viene dado
por:
De las particulas que pasan de la temperatura T + ∆T a T:
1
1
dT
1
q x = −Φ px Eu = − n vx c∆T = − n vx c
vx τ = − n vx
2
2
dx
2
2
c
dT
τ
dx
(4.5.6)
De las partículas que pasan de la temperatura T a T + ∆T :
q 'x = Φ ' px Eu =
1
1
dT
1
n v x c ∆T = n v x c
v x τ = n vx
2
2
dx
2
2
c
dT
τ
dx
(4.5.7)
Por tanto, el flujo total:
1
qtx = q x − q ' x = − n vx
2
2
c
dT
1
τ − n vx
dx
2
2
c
dT
τ = − n vx
dx
2
cτ
dT
dx
(4.5.8)
Figura 4.5.3.- Flujo total de energía es (contando ambos sentidos del flujo de particulas).
71
Considerando las tres posibles direcciones de la velocidad v y suponiendo que la distribución en
equilibrio es isótropa, se tiene:
2
1 2
2
2
v x = v y = vz = v
(4.5.9)
3
con lo que:
{
}
1 2 dT
1
dT
1
dT
1
dT
qtx = − nv cτ
= − nvcτ v
= Y como : l = τ v = − nvcl
= { C = nc} = − Cvl
3
dx
3
dx
3
dx
3
dx
(4.5.10)
de donde se obtiene un valor para la conductividad térmica de:
1
k = Cvl
3
(4.5.11)
siendo C la capacidad calorifica por unidad de volumen, v la velocidad media de la onda ( ≈ vs ) y l el
recorrido libre medio, que representa la distancia que debe de recorrer la onda antes de atenuarse en un
v
factor igual al número e). Su valor, l =
, depende de la frecuencia de las colisiones (un valor típico
1
τ
es l ≈ 3 x10
−8
cm ).
De la expresión (4.5.11) se deduce que aumentando la capacidad calorifica, el número de portadores y
su velocidad y el recorrido libre medio (Disminuyendo la atenuación o dispersión), resulta un aumento
de la conductividad térmica.
La expresión (4.5.11), de la que partió Debye, tiene una gran aplicabilidad general y resulta muy útil
dada su sencillez, de manera que, aunque se empleen métodos sofisticados para determinar el recorrido
libre medio, l, siempre resulta aconsejable comprobar con (4.5.11) que el resultado no es absurdo.
En el caso general, en los sólidos tienen lugar dos mecanismos fundamentales de transporte del calor:
- Transporte de la energía calorífica por los electrones libres.
- Transporte por las vibraciones de los átomos.
En los metales actúan ambos mecanismos a la vez, mientras que en los dieléctricos el mecanismo de
propagación del calor predominante es por las vibraciones de los átomos, ya que no hay prácticamente
electrones libres.
Como en el sólido los átomos están ligados entre si, al calentarse una parte cualquiera del cuerpo, la
amplitud de las vibraciones de los átomos de esta parte aumenta y los átomos, al moverse, "empujan" a
sus vecinos, los cuales a su vez transmiten el movimiento a sus vecinos y así sucesivamente. La
energía cinética de las vibraciones de los átomos es transportada, de esa forma, de la parte caliente a la
fría. El flujo macroscópico de energía cinética de los átomos se manifiesta como un flujo calorífico.
Este proceso es idéntico al de propagación de las ondas elásticas sonoras en el sólido.
Los modos normales de vibración de un cristal son ondas elásticas capaces de transportar energía, y
también que las energías permitidas de cada modo son discretas, lo que nos permite considerar los
modos como fonones o cuantos de energía. En realidad, resulta más sencillo, y es mucho más
adecuado, utilizar la imagen fonónica de las vibraciones para describir el transporte de energía.
72
Al explicar el fenómeno de la conducción del calor no puede suponerse ya que los átomos realizan
vibraciones rigurosamente armónicas, que se propagan en la red cristalina en forma de un sistema de
ondas elásticas que no interaccionan entre si. Estas se propagarían en el cristal libremente, sin
amortiguarse y, por consiguiente, tendrían un recorrido libre ilimitado. El flujo de calor, incluso si los
gradientes de temperatura fuesen pequeños, podría existir indefinidamente antes de que se estableciera
el equilibrio térmico y la conductividad térmica sería infinita.
En los sólidos reales, según muestra la experiencia, la conductividad térmica es finita. El valor finito
de la conductividad térmica se debe a que, en los cristales reales, las vibraciones de los átomos en la
red cristalina no son puramente armónicas, porque las fuerzas de interacción entre los átomos
dependen de forma no lineal de sus desplazamientos.
Desde el punto de vista de los procesos antes descritos, vamos a analizar la dependencia de la
conductividad térmica con respecto de la temperatura. Para ello se va utilizar la expresión de la
conductividad térmica (4.5.11 ), suponiendo que las partículas portadoras de energía calorífica son los
fonones (Movimiento de fonones), es decir:
1
1 2
k = Cvl = Cv τ
3
3
(4.5.12)
siendo:
C= Capacidad calorífica de un volumen unidad del cristal debida a las vibraciones de la red.
v = Velocidad media de los fonones ( ≈ v2 , velocidad del sonido en el cristal, que se puede considerar
que depende débilmente de la temperatura).
l = Longitud media del recorrido libre de los fonones, igual a la distancia media que recorren entre dos
actos consecutivos de dispersión.
τ = l v = Tiempo eficaz de relajación fonónico, que nos indica la probabilidad por unidad de tiempo
s
de que un fonón sufra algún proceso de colisión. Su valor recíproco, τ −1 , corresponde a la frecuencia
de los choques de fonones.
En la expresión (4.5.12), C y l son las magnitudes, que en lo fundamental, determinan la dependencia
de la conductividad térmica con respecto de la temperatura.
El recorrido libre medio, o equivalentemente el tiempo de relajación entre colisiones, y la dependencia
con T de este parámetro ha sido un verdadero problema a lo largo de muchos años.
Temperaturas altas.
A temperaturas altas, T > θ D , la capacidad calorífica se aproxima al valor límite determinado por la
Ley de Dulong y Petit (= 3 N Ak B = 3R), es decir, se hace independiente de la temperatura, por lo que la
dependencia de la conductividad térmica respecto de la temperatura viene determinada,
principalmente, por las variaciones de la longitud del recorrido medio de los fonones debidas a la
temperatura.
El número medio de fonones con una energía: ε = hυ = hω =
h
ω , donde ω es la frecuencia angular
2π
y h la constante de Planck, viene dado por:
n =
1
hω
kBT
e
(4.5.13)
−1
73
A temperaturas altas se cumple que:
k B T > hω
y como:
hω
kBT
e
2
3
2
3
hω 1 hω 1 hω
hω 1 hω 1 hω
−1 = 1 +
+
+
+
+ .......... − 1 =
+
+ .....
k BT 2 k BT 6 k BT
k BT 2 k BT 6 k BT
resulta:
hω
kBT
e
−1 ≈
hω
k BT
con lo que
n ≈
k BT
∝T
hω
(4.5.14)
Así, a temperaturas altas el número de fonones es muy grande y su variación con la temperatura es
prácticamente lineal.
Cuantos más fonones existan mayor será la probabilidad de que se produzcan procesos "UMKLAPP" o
de inversión y debe esperarse que la frecuencia de los choques crezca proporcionalmente a la
temperatura T y, por consiguiente, la longitud del recorrido libre medio del fonón variará de forma
inversamente proporcional a la temperatura:
1
l∝
(4.5.15)
T
luego en este caso ( T > θ D ) la conductividad térmica será:
k∝
1
T
(4.5.16)
Y la conductividad térmica disminuirá al aumentar la temperatura. Experimentalmente se ha observado
que:
k∝
1
con z tomando valores entre 1 y 2.
Tz
En los procesos- Umklapp (Figura 4.5.4) se comienza con dos fonones yendo en un sentido y se acaba
con un fonón yendo en sentido opuesto. Esta representación proporciona una idea intuitiva de cómo
los procesos-Umklapp contribuyen a la resistencia térmica del dieléctrico. Dado que se precisa
temperaturas elevadas para excitar fonones de vector de onda grande, cabe esperar que la
conductividad térmica de los no conductores disminuya con la temperatura. Pero incluso a
temperaturas bastante bajas, los procesos-U son importantes para el proceso de conducción.
74
Figura 4.5.4.- Ilustración de un proceso-U (Umklapp)
Temperaturas muy bajas.
A temperaturas muy bajas, T < θ D , el número medio de fonones capaces de participar en los procesos
de inversión, disminuye según una ley exponencial :
n =
1
hω
kBT
e
khωT
= e B
−1
− khωT
1 ≈ e B
(4.5.17)
De ahí que la probabilidad del proceso de inversión disminuye también con la exponencial y esto
significa que la longitud del recorrido libre del fonón aumenta exponencialmente al descender la
temperatura, es decir:
hω
kBT
l∝e
(4.5.18)
Por su parte, la capacidad calorífica disminuye al descender la temperatura, de acuerdo con la teoría de
Debye siguiendo una ley cúbica, T3 :
CV =
12π 4 N A k B
5θ D3
con lo que la conductividad térmica en este caso será:
T
T = 1.944
θD
3
3
hω
3 kBT
k ∝T e
(4.5.19)
(4.5.20)
y el resultado neto es que para un rango de temperaturas comprendido entre
θD
2
> T > 10 K la
conductividad térmica aumenta exponencialmente al disminuir la temperatura.
75
Cuando la temperatura se reduce aún más, y debido a la congelación de los procesos-Umklapp, se
alcanza un punto en el que la conductividad crece tan rápidamente, al disminuir la temperatura, que el
valor del recorrido libre medio de los fonones es tan elevado que se hace comparable al recorrido libre
medio debido a la difusión por impurezas e imperfecciones de la red, e incluso comparable al recorrido
libre medio debido a la difusión por las superficies de la muestra. Cuando esto ocurre, el recorrido
libre medio deja de ser el intrínseco de los efectos anarmónicos y se debe reemplazar el recorrido por
un valor independiente de la temperatura y determinado por la distribución de impurezas,
imperfecciones o tamaño de la muestra. Se entra en lo que se conoce como límite de Casimir. La
conductividad térmica en esta situación depende únicamente de la variación del calor específico es
decir, varia con T 3 :
k ∝ T3
(4.5.20)
La figura 4.5.5 ilustra la dependencia de la conductividad térmica con la temperatura.
Haciendo un resumen para todo el rango de temperaturas, a temperaturas muy bajas (< 10 K) la
conductividad térmica del no-metal esté limitada por los procesos de difusión debidos a la geometría y
pureza de la muestra (que son independientes de la temperatura) y que en consecuencia varíe con T3,
que es la dependencia que tiene el calor específico de la red. De manera que cuanto mayor sea la
sección de la muestra, mayor será la conductividad.
Figura 4.5.5.-Variación de la conductividad térmica con la temperatura para un aislante.
A partir de esa temperatura los procesos-Umklapp, aunque escasos, son lo suficientemente frecuentes
como para proporcionar un valor del recorrido libre medio comparable al que proporciona la difusión
por las superficies. En ese punto la conductividad alcanza un máximo, a partir del cual su valor
hω
k
T
3
disminuye con rapidez según el factor exponencial T e B , debido al aumento de los procesos1
Umklapp. Esta disminución para T < θ D , se ve reemplazada por la ley
, al reflejar el hecho del
T
aumento notorio de los procesos de difusión fonón-fonón y la constancia del calor específico.
En la figura 4.5.6 se da el valor de la conductividad térmica de un monocristal de alúmina en función
de la temperatura, apreciándose las tres zonas comentadas.
76
Figura 4.5.6.- Conductividad térmica de un monocristal de alúmina en función de la temperatura
Para las cerámicas cristalinas el efecto del recorrido libre medio es el dominante y la conductividad
térmica disminuye cuando la temperatura aumenta, es decir:
k=
a
a
o bien k = + b
T
T
(4.5.21)
Para los vidrios la estructura es desordenada y el recorrido libre medio no cambia de forma
significativa cuando aumenta la temperatura, así el efecto de la capacidad calorifica es el dominante y
la conductividad térmica aumenta cuando lo hace la temperatura, es decir:
k = cT + d
(4.5.22)
En la figura 4.5.7 se puede verse la como varia la conductividad térmica de la sílice vítrea
apreciándose como aumenta cuando lo hace la temperatura.
77
Figura 4.5.7.- Conductividad térmica (escala logaritmica) de materiales cerámicos.
Factores adicionales que afectan a la conductividad térmica de los materiales cerámicos son:
1.2.3.4.5.6.7.8.-
Dispersión de fases secundarias.
Impurezas que entran en solución solida
Impurezas que no entran en solución solida
Porosidad
Microgrietas
Presencia de fases vítreas
Juntas de grano
Tamaño de grano
La presencia de impurezas que entran en solución solida o no, reduce el valor de la conductividad
térmica. En el caso de que no entren en solución solida la reducción es menor. En la figura 4.5.8 se
ve la reducción del recorrido libre medio en el MgO cuando entra en solución sólida el NiO, los cuales
exhiben una solubilidad completa en estado solido. La ligera diferencia en el tamaño y distribución de
la nube electrónica da como resultado el aumento de los efectos de dispersión de las ondas elasticas de
red y con ello una disminución de la conductividad térmica.
78
Figura 4.5.8.- Reducción del recorrido libre medio en el MgO cuando entra en solución sólida el NiO
Por su parte, en la figura 4.5.9 se ilustra el efecto de las impurezas que no entran en solución solida.
En ella se muestra la conductividad térmica del BeO en función de la temperatura para tres grados de
pureza diferentes.
Figura 4.5.9.- Conductividad térmica del BeO en función de la temperatura para tres grados de pureza
diferentes.
El efecto de las fases dispersas sobre la conductividad térmica depende de la conductividad de cada
fase y de la distribución de las fases. La figura 4.5.10 muestra de forma esquematica varios tipos de
distribución de fases y ejemplos de su aplicación.
Las ecuaciones que nos dan la conductividad térmica del material en función de la fraccion de cada
fase y de su conductividad térmica son:
Paralelamente al plano de las láminas (Figura 4.5.10.a) la conductividad térmica global viene dada
por:
km = V1k1 + V2 k2
(4.5.23)
donde V1 y V2 son la fracción en volumen, en tanto por uno, de cada componente del material
compuesto y k1 y k2 son las conductividades térmicas de cada componente.
79
Si k 1 >> k2 se tiene que:
km ≈ V1k1
(4.5.24)
es decir, la conducción de calor esta controlada por el componente de mayor conductividad térmica
(mejor conductor). La mayor parte del calor se transfiere a través del mejor conductor.
Perpendicularmente al plano de las láminas (Figura 4.5.10.b) la conductividad térmica global viene
dada por:
km =
Si k1 >> k 2 se tiene que:
k1k2
V2 k1 + V1k2
km ≈
k2
V2
(4.5.25)
(4.5.26)
es decir, la conducción de calor esta controlada por el componente de menor conductividad térmica
(peor conductor).
Para fases dispersas, (Figura 4.5.10.c) la conductividad térmica global viene dada por:
k
2Vd 1 − c
kd
1+
k
1+ 2 c
kd
k m = kc
k
Vd 1 − c
kd
1−
k
1+ c
kd
(4.5.27)
donde:
kc = Conductividad térmica de la fase continua.
kd = Conductividad térmica de la fase dispersa.
Vd = Fracción en volumen de la fase dispersa.
Si kd >> k c se tiene que:
k m ≈ kc
1 + 2Vd
1 − Vd
de donde se deduce que aumentando la fracción en volumen de la fase dispersa
conductividad térmica global
Si kd << k c se tiene que:
k m ≈ kc
1 − Vd
1 + Vd
(4.5.28)
aumenta
la
(4.5.29)
de donde se deduce que aumentando la fracción en volumen de la fase dispersa disminuye la
conductividad térmica global.
80
Este último caso particular es el que se puede asimilar el constituyente disperso a la porosidad y el
constituyente disperso y matriz se asimila a la fase sólida, entonces haciendo Vd = P :
k m ≈ kc
1− P
1+ P
(4.5.30)
Luego aumentando la porosidad disminuye la conductividad térmica global.
Figura 4.5.10.- Modelos de distribución de dos fases o componentes en un material compuesto.
(a).- Láminas paralelas que pueden estar orientadas paralela o perpendicularmente a la
dirección del flujo de calor.
(b).- Fase matriz continua, con una dispersión de partículas discontinua
(c).- Grandes granos aislados separados por fase continua minoritaria.
Otro parámetro a analizar es el tamaño de los poros. Si el material que rodea a los poros es opaco se
puede definir la radiación efectiva de un poro:
(
q = σ AF12 T24 − T14
donde:
)
(4.5.31)
σ = Constante de Boltzmann
F12 = Factor de transferencia de la superficie 1 a la 2, que depende de las emitancias y de la
geometría, a través de los factores de forma o de visión.
Factorizando el término
(T24 − T14 )
y suponiendo un gradiente de temperatura pequeño, se puede
suponer T1 muy próxima a T2 y, por tanto:
T1 = T2 = Tm =
T1 + T2
2
81
Con lo que se llega a la ley T 3 :
T24 − T14 = 4T 3∆T
(4.5.32)
Y la expresión (4.5.31) se transforma en:
q = 4σ AF12T 3∆T
(4.5.33)
Asimilando el poro a una cavidad formado por dos planos paralelos, separados una distancia igual al
diámetro del poro, d p (Figura 4.5.11), se puede poner aplicando la ley de Fourier:
q = kefec A
Comparando las expresiones
kefec
dp
∆T
dp
(4.5.34)
(4.5.33) y (4.5.34) se deduce:
= 4σ F12T 3 de donde:
kefec = 4d pσ F12T 3
(4.5.35)
Figura 4.5.12.- Asimilación de un poro a una cavidad formado por dos planos paralelos
De la expresión (4.5.35) se deduce que el efecto de la radiación sobre la conductividad en los poros es
proporcional a su diámetro y al cubo de la temperatura absoluta. Así, los poros de mayor tamaño
contribuyen a aumentar la conductividad térmica a altas temperaturas, mientras que los poros de
pequeño tamaño son una buena barrera al flujo de calor. En la figura 4.5.12 se da conductividad
térmica efectiva de una circona, con un 20 % de porosidad, en función de la temperatura y del tamaño
de los poros y de la emisividad o emitancia,
82
Figura 4.5.12.- Conductividad térmica efectiva en función de la temperatura y del tamaño de los poros
En la figura 4.5.13 se puede ver la conductividad térmica efectiva en función de la temperatura y del
tamaño de los poros, para los mecanismos de transmisión de calor de conducción y de radiación.
Figura 4.5.13.- Conductividad térmica efectiva en función de la temperatura y del tamaño de los poros
para los mecanismos de transmisión de calor de conducción y de radiación.
83
En la figura 4.5.14 se puede ver la conductividad térmica de distintos ladrillos refractarios cocidos.
Es de notar el gradiente de temperatura negativo de la conductividad térmica en ladrillos de
composición casi exclusivamente cristalina, o sea ladrillos de magnesia, cromo-magnesia, corindón y
de circonio. Los ladrillos con gran cantidad de fase vítrea tienen un gradiente positivo y pequeño. A
temperatura ascendente los estados de oscilación de las materias cristalinas, no metálicas, se igualan a
los de las materias amorfas lo que conduce a valores convergentes para la conductividad térmica.
A parte de los ladrillos ligeros, los refractarios silicoaluminosos presentan conductividades térmicas
bajas, los básicos más altas y los de carbono y carburo de silicio muy alta, de ahí su importancia como
materiales adecuados cuando lo que se desea es una buena transmisión de calor, como es el caso del
crisol de los hornos altos.
Figura 4.5.13.- Conductividad térmica de ladrillos refractarios cocidos.
En la tabla 4.5.1 se dan los valores límites de la conductividad térmica para la división de los
materiales en buenos aislante termicos, moderados o pobres.
Tabla 4.5.1.- División de los materiales en buenos aislantes termicos, moderados o pobres.
TIPO MATERIAL
CONDUCTIVIDAD CONDUCTIVIDAD CONDUCTIVIDAD
TÉRMICA
TÉRMICA
TÉRMICA
(Btu.in/h(ft)2 ºF)
(W/m.k)
(Kcal/m.h.ºC)
BUENOS AISLANTES
0.3-2.0
0.043-0-288
0.037-0.25
MODERADOS
AISLANTES
2.0-5.0
0.288-0.721
0.25-0.62
POBRES AISLANTES
>5.0
>0.721
>0.62
84
4.6.- Resistencia al choque térmico.
4.6.1.- Introducción.
La mayoría de las aplicaciones de los materiales refractarios implican la existencia de gradientes de
temperatura variables en el tiempo. Estos gradientes producen dilataciones diferenciales en las piezas
y, consecuentemente, tensiones. Si las tensiones creadas superan a la tensión de fractura del material,
tiene lugar la rotura de la pieza. Junto con la corrosión y la abrasión, el fallo debido a las
solicitaciones termomecánicas es uno de los mecanismos fundamentales de degradación de las piezas
refractarias en servicio.
La resistencia al choque térmico es una propiedad de un material refractario que pone de manifiesto su
capacidad para resistir los cambios bruscos, en magnitud y tiempo, de la temperatura. Tal resistencia
influye de manera decisiva en su utilización y comportamiento, ya que las tensiones térmicas
provocadas en su masa por un calentamiento desigual (Gradientes de temperatura) y por la existencia
de constituyentes mineralógicos con diferentes coeficientes de dilatación lineal, pueden superar a la
tensión de rotura del material refractario y dar lugar a la formación de grietas y al desprendimiento de
trozos (Desconchados), con riesgo de destrucción total.
Se dice que un cuerpo esta sometido a choque térmico cuando la temperatura de su alrededor cambia
bruscamente. El caso en el que la velocidad de variación es infinita es el caso más sencillo de tratar
te6ricamente y, a la vez, el más extremo. Las conclusiones que se derivan de dicha aproximaci6n,
moduladas, son aplicables a situaciones de variaciones de temperatura más suaves.
4.6.2.-Tensiones térmicas.
Cuando se carga una probeta en un ensayo de tracción o de compresión uniaxial, sufre tanto
deformaciones unitarias longitudinales como laterales. Para materiales elásticos lineales cargados en
esfuerzo uniaxial, ya sea de tracción o de compresión, las deformaciones unitarias laterales que se
presentan siempre son proporcionales a las deformaciones unitarias longitudinales. La relación entre la
magnitud de la deformación unitaria lateral y la magnitud de la deformación unitaria longitudinal, se
denomina relación o coeficiente de Poisson y se designa por υ. Así:
υ=
ε LATERAL
ε LONGITUDINAL
para el caso de que exista solamente esfuerzo uniaxial. El coeficiente de Poisson, al igual que el
módulo elástico E, es una propiedad del material que se debe determinar mediante ensayos.
Un pequeño elemento de un material elástico lineal sometido a un esfuerzo unitario uniaxial σx (Figura
4.6.2.1) sufre una deformación unitaria longitudinal (En la dirección del esfuerzo) dada por la ley de
Hooke igual a:
εx =
σx
(4.6.2.1)
E
Al mismo tiempo, si el material es isotrópico, ocurren las deformaciones unitarias laterales, que vienen
dadas por:
ε y = ε z = −υε x = −υ
σx
E
(4.6.2.2)
85
Figura 4.6.2.1.- Alargamiento axial (z) (deformación positiva) y contracciones laterales (x e y) en
respuesta a una tracción aplicada. Las líneas continuas representan las dimensiones
después de aplicación de la carga y las discontinuas, antes.
Para los materiales isotrópicos las deformaciones unitarias laterales son iguales en todas las
dirrecciones perpendiculares al eje x. En forma más general, materiales isotrópicos son aquellos para
los cuales las ecuaciones (4.6.2.1) y (4.6.2.2) son las mismas para todas las direcciones coordenadas.
En un material isotrópico, los valores de E y υ son iguales no importando la dirección del esfuerzo
uniaxial.
Si un elemento de un material isotrópico elástico lineal se somete simultaneamente a las tres
componentes de esfuerzo normal σx, σy y σz, entonces ocurren las deformaciones unitarias ε x, ε y y ε z,
cada una de las cuales es producida por el efecto combinado de los tres esfuerzos normales. Cualquiera
de las deformaciones unitarias es causada por el esfuerzo normal que actúa en su dirección, dando una
deformación dada por la ecuación (4.6.2.1) y por los esfuerzos laterales producidos por el efecto de
Poisson y que dan unas deformaciones dadas por la ecuación (4.6.2.2). Así las expresiones para las
deformaciones producidas por las tres componentes de esfuerzo normal son:
εx =
σx
E
ε y = −υ
ε z = −υ
−υ
σx
E
σx
E
σy
E
+
−υ
σy
E
−υ
σz
E
−υ
σy
E
+
σz
E
(4.6.2.3)
σz
E
86
Si además se aplican al elemento los esfuerzos cortantes τ xy, τ xz y τ yz, se producirán las deformaciones
de corte γxy, γ xz y γ yz cuyo valor viene dado por:
γ xy =
τ xy
G
,
γ xz =
τ xz
G
γ yz =
y
τ yz
G
(4.6.2.4)
donde:
G = Modulo de cizalladura
Las ecuaciones anteriores representan la ley generalizada de Hooke. Entre los tres parámetros E, G y υ
existe una relación que es:
E
G=
(4.6.2.5)
2 (1 + υ )
de modo que, si se miden E y υ mediante los ensayos adecuados, se puede determinar G mediante la
relación anterior.
Las tensiones térmicas son esfuerzos inducidos en un cuerpo como resultado de cambios en la
temperatura en un cuerpo dando lugar a gradientes de temperatura y por la existencia de constituyentes
mineralógicos con diferentes coeficientes de dilatación lineal. El conocimiento de los orígenes y
naturaleza de las tensiones térmicas es importante debido a que estas tensiones conducen a la fractura,
o bien a una deformación plástica no deseable.
Tensiones resultantes de la dilatación y contracción restringidas .
Cuando un cuerpo homogéneo isotrópico se calienta de forma uniforme, de tal modo que no existan
gradientes de temperatura, no aparecen tensiones térmicas. Sin embargo, si la expansión esta impedida
(Restringida) por elementos externos, aparecerán tensiones térmicas aún cuando la temperatura sea
uniforme. Por ejemplo, si una barra homogénea isotrópica se calienta desde una temperatura T1 hasta
una T 2 de tal manera sea uniforme en toda la barra (Figura 4.6.2.2), esta experimentará una dilatación
lineal es la dirección axial cuyo valor es:
L f = L0 (1 + α∆T ) ,
L f − L0
L0
= α∆T ,
ε = α∆T = α (T2 − T1 )
(4.6.2.6)
donde α es el coeficiente de dilatación lineal del material sólido que constituye la barra. Si la
dilatación de la barra esta impedida, aparecerá, una tensión térmica de compresión cuyo valor,
suponiendo que el comportamiento es elástico lineal, es:
σ t = Eε = Eα∆T = Eα (T2 − T1 )
(4.6.2.7)
donde E es el módulo de Young del material. Al calentar (T 2 > T1 ), la tensión es de compresión (σ<
0), puesto que la dilatación ha estadorestringida. Si la barra es enfriada (T 2 < T 1 ), se producirá una
tracción (σ > 0). También la tensión de la ecuación (4.6.2.6) es la misma que la que se requeriría para
comprimir elásticamente (o alargar) la barra de nuevo a su longitud original después que se ha dilatado
(o contraído) con un cambio de temperatura de T2 - T 1 .
Por ejemplo, para un refractario de alta alúmina, para el cual α ≈ 7.8 x10−6 º C −1 , E = 360 GPa y para
un ∆T = 200 º C , se tendrá:
σ = 562 MPa
87
Figura 4.6.2.2.- Barra isotrópica calentada desde una temperatura T 1 hasta una T 2 .
En la práctica, las variaciones de temperatura no son instantáneas y las tensiones creadas varían en el
tiempo y son menores que la calculada a partir de la expresión (4.6.2.7). La tensión máxima creada es
función de propiedades del material, tales como la conductividd térmica, k, factores geométricos,
como las dimensiones del cuerpo, y el mecanismo de transmisión de calor.
Un razonamiento similar se puede aplicar para una expansión en dos direcciones perpendiculares,
como sería el caso de placa de dos dimension finitas y la otra infinita (Plancha o cilindro de gran
longitud, etc). Si la expansión esta totalmente impedida en las dos dimensiones finitas la tensión
térmica se obtiene de igual modo. Las expansiones unitarias que tendrían lugar en el caso de no haber
impedimento serían iguales las dos y valdrían:
ε = α∆T = α (T2 − T1 )
Dichas deformaciones en el caso de no ser debidas al incremento de temperatura, se pueden producir
por dos esfuerzos normales iguales:
σ = Eε
Por tanto, al estar impedida la expansión se producirán dos tensiones que cumplirán la ley de Hooke
generalizada:
εx =
σx
E
ε y = −υ
−υ
σx
E
σy
E
+
−υ
σy
E
σz
E
−υ
σz
(4.6.2.8)
E
donde σ x = σ y , σ z = 0 y ε x = ε y
Resolviendo una de ellas, haciendo ε = α∆T , se tiene:
ε=
σ
E
−υ
σ
E
= α∆T
(4.6.2.9)
Operando:
σ − υσ = Eα∆T ,
σ (1 − υ ) = Eα∆t ,
σ=
Eα∆T
1−υ
(4.6.2.10)
donde el término (1 − υ ) tiene en cuenta el efecto de Poisson.
88
Por ejemplo, para un material refractario de magnesia, para el cual α = 14 x10−6 º C −1 , E = 172 GPa,
υ = 0.1 y para un ∆T = 100 º C se tendrá:
σ = 270 MPa
Cuando la expansión esta totalmente impedida en las tres dimensiones (Caso de un paralelepípedo con
las tres dimensiones finitas), la tensión térmica se obtiene de igual modo. Las expansiones unitarias
que tendrían lugar en el caso de no haber impedimento serían iguales las tres y valdrían
ε = α∆T = α (T2 − T1 )
Dichas deformaciones en el caso de no ser debidas al incremento de temperatura, se pueden producir
por tres esfuerzos normales iguales:
σ = Eε
Por tanto, al estar impedida la expansión se producirán tres tensiones que cumplirán la ley de Hooke
generalizada
εx =
σx
E
ε y = −υ
ε z = −υ
−υ
σx
E
σx
E
σy
E
+
−υ
σy
E
−υ
σz
E
−υ
σy
E
+
σz
E
σz
E
donde: σ x = σ y = σ z y ε x = ε y = ε z
Resolviendo una de ellas , haciendo ε = α∆T , se tiene:
ε=
de donde:
σ − 2υσ = Eα∆T
σ
E
−υ
σ
E
−υ
σ
E
=
σ
E
− 2υ
σ
E
= α∆T
de donde: σ (1 − 2υ ) = Eα∆T
o bien :
σ=
Eα∆T
1 − 2υ
(4.6.2.11)
donde otra vez el término (1 − 2υ ) tiene en cuenta el efecto de Poisson.
Las ecuaciones halladas para las tensiones térmicas, indican que estas aumentan cuando lo hace el ∆T
impuesto y para materiales con un valor alto del coeficiente de dilatación lineal α, del módulo de
Young E y del coeficiente de Poisson υ.
En la tabla 4.6.2.1 pueden verse los valores de los parámetros anteriores para diversos materiales
cerámicos. Se puede observar que el coeficiente de Poisson es casi el mismo para todos los materiales
oscilando, en la mayoría de los casos, entre 0.20 y 0.25.
89
Tabla 4.6.2.1.- Valores de propiedades de diversos materiales cerámicos.
4.6.3.- Tensiones resultantes de gradientes de temperatura. Aproximación termoelástica.
El análisis anterior se realizo calentando un material desde una temperatura uniforme hasta otra mayor
tambien uniforme, dando lugar a un ∆T del material, el cual producía tensiones térmicas si la
expansión estaba impedida. Dicho ∆T en el material (Gradiente de temperatura) puede aparecer como
consecuencia de un calentamiento o enfriamiento rápidos (Cambio brusco de la temperatura, que
produce una diferencia de temperatura entre la superficie y el interior o entre varias zonas del cuerpo),
los cuales producen tensiones térmicas en el cuerpo, aunque este no tenga impedidos sus
movimiento)(Expansión o contracción).
Cuando un cuerpo es calentado o enfriado, la distribución de temperatura dependerá de su tamaño y
forma, de la conductividad térmica del material y de la velocidad del cambio de temperatura. Como
resultado de los gradientes de temperatura en el interior del cuerpo, debidos frecuentemente a
calentamientos o enfriamientos en los que la temperatura externa cambia más rápidamente que la
interna, se producen tensiones térmicas.
Los cambios dimensionales diferenciales restringen la dilatación o contracción libres de elementos de
volumen adyacentes dentro de la pieza. Por ejemplo, al calentar, el exterior de una pieza está más
caliente y, por tanto, se dilatará más que las regiones del interior. Por consiguiente, se inducen
esfuerzos superficiales de compresión, los cuales son equilibrados por esfuerzos de tracción internos.
El sentido de los esfuerzos interior-exterior se invierte durante el enfriamiento rápido, de manera que
la superficie es sometida a tracción (Figura 4.6.3.1)
Figura 4.6.3.1.- Distribución de temperaturas y tensiones en una placa:
(a).- Enfriada rápidamente en su superficie.
(b).- Calentada rápidamente en su superficie.
90
Además, también pueden aparecer tensiones de corte en la zona superficial, que, usualmente, tiene un
valor igual a la mitad de las tensiones principales. Las tensiones de corte son iguales durante el
enfriamiento que durante del calentamiento, y pueden llegar a ser tensiones de flexión, cuando la
distribución de temperaturas dentro del cuerpo no es uniforme. Las tensiones de corte, aunque no
causan la rotura como las de tracción, si pueden causar desconchados o astillados de la superficie.
Los materiales dúctiles resisten mucho mejor al choque térmico que los frágiles, suponiendo igualdad
en la resistencia y propiedades térmicas. Ello se debe a que en los materiales dúctiles cualquier exceso
de las tensiones térmicas desarrolladas puede ser disipada como resultado de la deformación plástica,
mientras que en los materiales frágiles no existe, prácticamente, deformación plástica no existe el
fenómeno anterior.
El valor de las tensiones térmicas originadas por una diferencia de temperatura ∆T (variación de la
temperatura infinita), viene dada por la expresión:
Eα∆T
σt =
(4.6.3.1)
1 −υ
De la expresión anterior se deduce, que un material tendrá una mayor capacidad para resistir los
cambios bruscos de temperatura (La resistencia al choque térmico será elevada) cuando σ t sea
pequeña, con lo que se tiene:
1.2.3.4.-
Cuanto
Cuanto
Cuanto
Cuanto
menor
menor
menor
menor
sea
sea
sea
sea
el
el
el
el
valor
valor
valor
valor
del
del
del
del
módulo de Young, E.
coeficiente de dilatación lineal, α.
coeficiente de Poisson, υ.
∆T.
El valor del ∆T es tanto más pequeño, cuanto mayor es la conductividad térmica, k, del material. El ∆T
del material puede disminuirse modificando las condiciones de transferencia de calor.
En el caso de un enfriamiento brusco existe un flujo de calor del cuerpo hacia el entorno, en un
instante dado y durante un intervalo infinitesimal de tiempo, aplicando la ley de Fourier se tiene que
(No se tiene en cuenta el signo):
•
∆T
2
Flujo de calor (J/s.m ) = q = k
L
de donde:
•
qL
∆T =
k
Y sustituyendo este valor en la expresión que nos da la tensión térmica, σt , se tiene:
•
Eα q L
σt =
K (1 − υ )
(4.6.3.2)
La expresión (4.6.3.2) ponen de manifiesto que cuanto mayor es la conductividad térmica , k, del
material más elevada es su resistencia al choque térmico.
La expresión anterior también pone de manifiesto que cuanto más pequeño es el tamaño del cuerpo
más elevada es su resistencia al choque térmico. El tamaño es un factor importante que afecta a la
resistencia al choque térmico. Así, en los cuerpos o piezas de gran tamaño la zona que experimenta un
cambio brusco de la temperatura ve impedida su expansión o contracción, durante un apreciable
periodo de tiempo, por una zona de gran tamaño que aún no esta afectada por el cambio brusco de
temperatura impuesto.
91
Los materiales que tienen un módulo de Young E elevado, en general, tambien tiene una resistencia a
la rotura, σr , mayor, con lo que se contrarresta el efecto perjudicial de un valor de E grande. En todo
caso es deseable una relación (σr /E) tan alta como sea posible.
Los factores geométricos se pueden englobar en un factor G y la tensión térmica tendrá el valor
σt =
Eα∆T
G (1 − υ )
(4.6.3.3)
En el caso de velocidad de transferencia de calor finita la ecuación anterior incorpora un factor
Ψ=
σ real
de reducción de la tensión máxima que varia en el tiempo y es función del módulo de Biot,
σ max
β . La tensión alcanzada en la pieza será máxima para un valor Ψ max .
La velocidad de transferencia de calor puede determinarse mediante el denominado número de Biot
(Bi), que es adimensional, y se define como:
Bi = β =
L
Re sistencia térmica int erna a la conducción
hL
= kA =
k
Re sistencia térmica externa a la convección 1
hA
(4.6.3.4)
donde:
k = Conductividad térmica del material sólido.
h = Coeficiente de transferencia de calor o coeficiente de película (Depende de la manera en que se
enfrie o caliente el material)
L = Longitud característica adecuada para el cuerpo sólido, que para una placa es la mitad del espesor
y para un cilindro el radio.
Si L o h son grandes o si k es pequeña el valor del número de Biot es grande, lo que se corresponde
con velocidades altas de transferencia de calor y la resistencia al choque térmico es, prácticamente
independiente de h y de k.
Valores bajos del número de Biot (L y/o h pequeñas y/o k grande) se corresponden con velocidades
bajas y moderadas de transferencia de calor y en la resistencia al choque térmico influye la
conductividad térmica del material.
Se han propuesto distintas fórmulas aproximadas que relacionan Ψ max con el número de Biot. Las más
sencillas son las que se obtienen para valores pequeños del número de Biot ( β < 20 ), las cuales
proporcionan relaciones lineales, Ψ ≈ β . Al igual que en el caso anterior, se pueden agrupar todos los
términos geométricos en un factor de forma, G, y se obtiene:
σ max =
hEα∆T
kG (1 − υ )
(4.6.3.5)
Ecuación que, a diferencia del caso anterior, incorpora tanto el coeficiente de transmisión de calor
entre la superficie del cuerpo y el medio como la conductividad térmica del material.
El factor de forma, G, depende de la geometría de la pieza y de la dirección del gradiente de
temperatura y es inversamente proporcional a la dimensión característica del cuerpo en la dirección del
gradiente máximo de temperatura.
92
La pieza rompe cuando se ve sometida a una diferencia de temperatura igual o superior a la necesaria
para crear una tensión igual a la tensión de fractura del material, σf. Se define diferencia de
temperatura crítica:
∆Tc =
∆Tc =
Gσ f (1 − υ )
αE
kGσ f (1 − υ )
hα E
si h = ∞
(4.6.3.6)
si h = Cte
(4.6.3.7)
Las propiedades del material se pueden agrupar en dos parámetros, R y R', denominados parámetros de
resistencia al choque térmico, que cuanto mayor sea su valor mayor será la resistencia del material a la
nucleación de la fractura por tensiones térmicas. Estos parámetros son:
R=
σ f (1 − υ )
R'=
αE
kσ f (1 − υ )
αE
si h = ∞
(4.6.3.8)
si h = Cte
(4.6.3.9)
A partir de las ecuaciones (4.6.3.8) y (4.6.3.9), un material es tanto más resistente al choque térmico
cuanto mayores son su resistencia a la fractura y su conductividad térmica y menores su módulo de
Young y su coeficiente de dilatación térmica.
En base a estos resultados puede explicarse tanto la caida brusca que sufre el módulo de rotura de un
material sometido a una variación brusca de temperatura de magnitud ∆Tc, como la diferencia
encontrada entre el ∆Tc, de los refractarios de la figura 4.6.3.2, que han sido sometidos a un
calentamiento brusco. El parámetro R es del mismo orden para los dos materiales, magnesia y
silicoaluminoso, pero debido a la gran diferencia existente entre las conductividades térmicas de estos
dos materiales no es posible asumir condiciones de variación de temperatura infinitamente rápida. El
parámetro R' es muy superior para el refractario de magnesia y es el que explica que ∆Tc sea superior
para el refractario de magnesia.
Figura 4.6.3.2.- Variación del módulo de rotura de dos materiales refractarios en función de la
magnitud de variación de la temperatura (a) Magnesia (b)Silicoaluminoso.
93
La conductividad térmica y el coeficiente de dilatación lineal del material son las propiedades que más
influyen sobre la resistencia al choque térmico de los materiales, particularmente de los cerámicos y
vidrios. Así, para tener una buena resistencia al choque térmico la conductividad térmica debe ser alta
y el coeficiente de dilatación lineal bajo.
Si la conductividad térmica del material es muy elevada, prácticamente, no aparecen gradientes de
temperatura, por tanto, tampoco se desarrollarían tensiones térmicas. Así, los materiales metálicos
debido a su alta conductividad térmica presentan una resistencia al choque térmico elevada, aunque
también se debe a su ductilidad.
4.6.4.- Criterio de balance energetico.
En muchos casos, las condiciones de trabajo de las piezas refractarias suelen ser lo suficientemente
severas como para producir la nucleación de la fractura. Por ello, es preciso conocer el grado de daño
que va a sufrir el material debido a la fractura.
Asumiendo que el cuerpo que sufre el choque térmico no está sometido a fuerzas externas, la única
energía disponible para la propagación de las grietas es la energía elástica que ha sido acumulada en el
cuerpo hasta el momento de la fractura. No es posible realizar un balance energético exacto durante la
propagación de la grieta pero, se puede asumir que el área de las nuevas superficies creadas es
proporcional a la energía disponible para su propagación.
El modelo utilizado por Hasselman es una esfera de radio b cuya superficie sufre un cambio brusco de
temperatura. Las conclusiones, en lo que se refiere a propiedades de los materiales, pueden ser
generalizadas a otro tipo de geometría utilizando análisis dimensional.
La fractura tiene lugar si:
σ max = σ f
En el momento de la fractura la energía elástica acumulada en la pieza viene dada por:
We =
σ f2 (1 − υ )V
E
(4.6.4.1)
donde V es el volumen de la pieza. Así pues, la energía elástica acumulada es proporcional
σ f2
E
. El
factor (1-υ) se refiere a un estado biaxial de tensiones.
La energía superficial de fractura necesaria para propagar N grietas a través de un área A, viene dada
por:
Wf = 2NAUef
(4.6.4.2)
donde Uef es la energía superficial efectiva de fractura y agrupa tanto a la energía superficial
termodinámica como a la energía disipada por cualquier medio (por ejemplo: deformación plástica)
durante la fractura.
Haciendo W f = W e, se obtiene el área, A, a través de la que se propagará una grieta:
A=
σ f2 (1 − υ )V
2NEUef
(4.6.4.3)
Cuando A > S, la pieza rompe (S = sección de la pieza).
94
En base a este criterio, un material será resistente al choque térmico si la relación entre sus
propiedades minimiza A por lo que, se obtienen los siguientes parámetros de resistencia al choque
térmico:
E
R ''' = 2
(4.6.4.4)
σ f (1 − υ )
R '''' = Uf R '''
(4.6.4.5)
donde, R"' permite comparar materiales con energías superficiales de fractura del mismo orden.
Para minimizar el grado de daño se requieren materiales con valores pequeños de la resistencia a la
fractura, σ f y grandes del módulo de Young, E, y de la energía superficial de fractura, Uef. Por otra
parte, la nucleación de un gran número de grietas también disminuye el grado de propagación de cada
una de éstas.
Utilizando estos dos parámetros queda clara la diferencia entre el grado de daño sufrido por las piezas
refractarias cuyo comportamiento está representado en la figura 4.6.3.2. Una vez iniciada la fractura,
las grietas se propagan bruscamente una distancia que viene determinada por las propiedades físicas
del material que gobiernan la propagación de la grieta y que están englobadas en los parámetros R’’’ y
R’’’’.
Hasta ahora se han descrito dos criterios para seleccionar materiales que en uso van, a estar sometidos
a variaciones de temperatura. El primero, basado en la teoría termoelástica, se refiere a la nucleación
de la fractura y el segundo, basado en un balance energético, al grado de daño.
Los materiales con alta resistencia a la nucleación de la fractura por tensiones térmicas han de tener
altos valores de la resistencia a la fractura y de la conductividad térmica y valores bajos del módulo de
Young, del coeficiente de dilatación térmica y del coeficiente de Poisson.
El segundo criterio permite seleccionar materiales en los que la variación de sus propiedades debido a
la fractura por choque térmico sea mínima. Este criterio es útil cuando las condiciones de trabajo son
muy severas, de forma que no es posible evitar la nucleación de las grietas.
Los materiales que sufrirán una menor degradación cuando se produzca la fractura por choque térmico
serán los que posean altos valores del módulo de Young, del coeficiente de Poisson y de la energía de
fractura y valores bajos de la resistencia a la fractura.
Ninguna de las dos aproximaciones permite explicar las diferencias en la forma de degradación de
algunos materiales cuando se ven sometidos a enfriamientos y/ o a calentamientos (Figura 4.6.4.1,
refractario silicoaluminoso).
95
Figura 4.6.4.1.- Variación del módulo de rotura de un material refractario silicoaluminoso en función
de la magnitud de variación de la temperatura
Por otra parte, en base a estas dos aproximaciones, tampoco es posible analizar el comportamiento de
los materiales refractarios recogido en la figura 4.6.4.2. Estos materiales han sido ensayados vertiendo
acero fundido en una cuchara precalentada a distintas temperaturas y vaciando, a continuación, la
cuchara. En la tabla 4.6.4.1 se recogen los valores de los parámetros de resistencia al choque térmico
calculados para estos materiales.
El excelente comportamiento del material C (bauxita) quedaría explicado por los altos valores de R y
R', que corresponden a un ∆Tc alto. En base a estos parámetros, las piezas silicoaluminosas (A) no
deberían romper, incluso para los choques más severos. Además, tampoco se explica la existencia de
un tramo de no variación del módulo de rotura entre dos incrementos de temperatura.
Por otra parte, los ∆Tc, de los materiales F (magnesita) y D (alúmina electrofundida) deberían ser
diferentes ya que tanto sus parámetros R como los R' lo son. En cuanto al grado de daño (parámetro
R’’’’), el material D (alúmina electrofundida) debería ser el óptimo y, sin embargo, la curva de caída
de su módulo de rotura es la más pronunciada. Estos comportamientos frente al choque térmico surgen
de forma natural del análisis teórico de Hasselman, posterior al realizado en base al criterio de balance
energético, denominada teoría unificada de Hasselman
96
Figura 4.6.4.1.- Variación del módulo de rotura de una serie de materiales refractarios en función de la
magnitud de variación de la temperatura: A, silicoaluminoso, C: bauxita, D: alúmina
electrofundida F: magnesia.
Tabla 4.6.4.1.- Valores de los parámetros de resistencia al choque térmico para los materiales cuyo
comportamiento se recoge en la figura 4.6.4.2.
97
4.6.5.- Teoría unificada de Hasselman.
La figura 4.6.5.1 recoge el comportamiento general de un material frágil sometido a enfriamientos
bruscos de distinta severidad ∆T. A partir de los resultados de la teoría termoelástica, es posible
predecir la existencia del primer incremento de temperatura crítica, ∆Tc, o mínima diferencia de
temperatura que origina la fractura del material. Utilizando un criterio de balance energético es posible
predecir el grado de daño sufrido por la pieza. Pero, de ninguna de estas dos aproximaciones surgen
como conclusión los tramos restantes de la curva de la figura: grado de daño constante en una región
de ∆Tc, existencia de un segundo incremento de temperatura crítica, ∆T’c, y aumento gradual del
grado de daño para choques térmicos de intensidad superior a ∆T’c.
La teoría unificada de Hasselman engloba tanto el momento de la nucleación de la grieta como su
propagación y permite predecir completamente el comportamiento de un material frágil frente al
choque térmico mostrado en la figura 4.6.5.1. Esta teoría está basada en un criterio de mínima energía
potencial, del mismo tipo que el utilizado por Griffith para estudiar la fractura de sólidos frágiles.
Figura 4.6.5.1.- Resistencia a la fractura de un material frágil sometido a enfriamientos bruscos de
distintas intensidades.
Modelo y criterio.
El modelo utilizado es el indicado en la figura 4.6.5.2. Una lámina –infinita en la dirección X y cuya
deformación en la dirección Y está impedida– de un material completamente frágil que contiene N
grietas, de longitud 2L, por unidad de superficie, es enfriada uniformemente un incremento de
temperatura ∆T. Se asume que las grietas no interaccionan y que la fractura tiene lugar, cuando
∆T = ∆Tc, por la propagación simultánea de las N grietas.
El estado de equilibrio de un sólido elástico sometido a fuerzas externas es aquel en el que la energía
potencial de todo el sistema es mínima. Para utilizar este teorema al estudiar la fractura de sólidos
reales es preciso considerar, además de la variación en la energía elástica, el aumento de energía
potencial que supone la creación de dos nuevas superficies.
98
Figura 4.6.5.2.- Modelo utilizado en la teoria unificada de Hasselman en dos dimensiones.
El módulo de Young de la placa viene dado por:
Eef =
E
1 + 2π NL2
(4.6.5.1)
donde E es el módulo de Young del material sin grietas.
La energía elástica por unidad de superficie acumulada en la placa cuando es enfriada uniformemente
un ∆T es:
α 2 (∆T ) 2 E
We =
(4.6.5.2)
2(1 + 2π NL2 )
donde, α, es el coeficiente de dilatación del material.
La energía superficial por unidad de superficie debida a la presencia de las N grietas es:
Ws = 4GNL
(4.6.5.3)
donde G es la energía requerida para producir una unidad de superficie de grieta (equivalente a la
energía superficial de fractura efectiva del criterio del balance energético.
La fractura tendrá lugar si:
dW
<0
dL
(4.6.5.4)
donde:
W = We + Ws es la energía potencial del sistema.
Condición térmica para el inicio de la fractura.
Utilizando el criterio de la disminución de la energía potencial, se tiene que si dW > 0 las grietas serán
estables y si dW<0 serán inestables. La condición (dW/dL) = 0, proporciona el incremento mínimo de
temperatura para que las grietas se propaguen, ∆Tc:
α 2 (∆T )2 E
W = We + Ws =
+ 4GNL
2(1 + 2π NL2 )
y
dW
2α 2 (∆T ) 2 Eπ NL
dW
2α 2 (∆T ) 2 Eπ NL
= 4GN −
,
=
0
→
4
GN
−
=0
dL
dL
(1 + 2π NL2 ) 2
(1 + 2π NL2 ) 2
99
operando:
(∆Tc )2 =
(
4GN (1 + 2π NL2 )2
,
2α 2 Eπ NL
∆Tc =
2G
(1 + 2π NL2 )
2
π Lα E
(4.6.5.5)
)
Para grietas cortas 2π NL2 << 1 el incremento crítico de temperatura es:
∆Tc =
− 12
proporcional a L
(
2G
π Lα 2 E
(4.6.5.6)
e independiente de N.
)
Para grietas largas 2π NL2 >> 1 el incremento de temperatura crítico:
∆Tc' =
3
proporcional a L
2
8π GN 2 L3
α 2E
(4.6.5.7)
y a la densidad de grietas, N.
La aproximación de grietas largas es discutible ya que una de las asunciones de la teoría de Hasselman
es que las grietas no interaccionan, hipótesis que no será cierta para una alta densidad de grietas de
tamaño, L, grand .
En el caso de grietas cortas, si se tiene en cuenta la relación derivada del criterio de Griffith para
grietas planas, se tiene que:
∆Tc ≈
σf
αE
(4.6.5.8)
y, para grietas circulares planas, el modelo tridimensional proporciona:
∆Tc ≈
σ f (1 − υ )
αE
(4.6.5.9)
por lo que, se recupera el parámetro R de resistencia al choque térmico de la teoría termoelástica:
R=
σ f (1 − υ )
αE
(4.6.5.10)
lo cual es coherente ya que la teoría termoelástica analiza la condición para el inicio de la fractura.
En el caso de grietas largas, el parámetro que optimiza la resistencia del material frente al choque
térmico es diferente e incluye la energía de fractura. A partir de la ecuación (4.6.5.7):
Rst =
G
α 2E
(4.6.5.11)
este parámetro no tiene equivalente ni en los resultados derivados de la teoría termoelástica, ni en los
derivados del criterio de balance energético.
100
Regiones de estabilidad de las grietas.
Para una placa de un material con una densidad de grietas dada, el plano ∆Tc - L queda dividido en
zonas de estabilidad e inestabilidad, delimitadas por la curva (dW/dL) = 0.
En la figura 4.6.5.3 se muestran las mencionadas zonas para placas con densidad de grietas N = 10/2π
y N = 1/2π e idénticas propiedades E, G y α. De esta figura se deduce que, para un valor ∆T’’c, la
fractura de la placa tiene lugar si el tamaño de las grietas está situado entre dos valores de L. El valor
máximo del tamaño de las grietas que no daría lugar a la fractura de las placas, L’’0 , es el mismo en el
caso de alta densidad de grietas (N = 10/2π) que en el caso de baja densidad de grietas (N = 1/2π). Sin
embargo, el tamaño máximo de grieta para el que la fractura tendrá lugar es menor para la placa con
alta densidad de grietas (L’’1 ) que para la placa con baja densidad de grietas (L’’2 ).
Figura 4.6.5.3.- Zonas de estabilidad en el plano ∆Tc - L para materiales con densidad de grietas
N = 10/2π y N = 1/2π
Forma de propagación de las grietas.
La condición (dW/dL) = 0 es una condición de equilibrio. Para que la fractura tenga lugar, la tensión
térmica deberá ser un infinitésimo superior a la correspondiente a dicha condición El signo de
2
2
d W/dL determina el tipo de equilibrio y, con ello, el tipo de propagación que tendrán las grietas
cuando ∆T es un infinitésimo superior a ∆Tc.
2
2
La condición (d W/dL ) = 0 proporciona:
d 2W 2α 2 (∆T )2 Eπ N (1 + 2π NL2 ) 2 − 16α 2 (∆T ) 2 Eπ NL(1 + 2π NL2 )π NL
=
dL2
(1 + 2π NL2 )4
101
Simplificando:
d 2W 2α 2 (∆T )2 Eπ N (1 + 2π NL2 ) − 16α 2 (∆T ) 2 Eπ 2 N 2 L2 2α 2 (∆T )2 Eπ N − 12α 2 (∆T )2 Eπ 2 N 2 L2
=
=
(1 + 2π NL2 )3
(1 + 2π NL2 )3
dL2
o bien:
d 2W 2α 2 (∆T )2 Eπ N (1 − 6π NL2 )
=
dL2
(1 + 2π NL2 )3
d 2W
=0
dL2
2α 2 (∆T )2 Eπ N (1 − 6π NL2 ) = 0, 1 − 6π NL2 = 0
→
Luego:
Lm = 6π N
(4.6.5.12)
Sea, L la longitud de las grietas existentes en la placa:
2
2
1.- Si L > Lm, entonces (d W/dL ) > 0, condición de equilibrio estable por lo que, su forma de
propagación será cuasiestática,
2
2
2.- Si L < Lm, entonces (d W/dL ) < 0, condición de equilibrio inestable, por lo que, su forma de
propagación será cinética.
La expresión (4.6.5.12) indica que el tamaño máximo de grieta, L, que separa las regiones de
propagación estable e inestable es tanto mayor cuanto menor sea la densidad de grietas en el material.
Esto tiene una implicación práctica importante ya que indica que los materiales con más defectos en su
interior sufren un daño menor cuando tiene lugar la fractura por choque térmico.
Grado de propagación cinética.
Las grietas con L < Lm se propagan hasta que la disminución de la energía elástica iguala al aumento
de energía superficial debido a la extensión de las grietas, es decir:
We ( L0 ) − We ( L f ) = Ws ( L f ) − Ws ( L0 )
(4.6.5.13)
donde L0 y Lf son las longitudes inicial y final de las grietas.
Teniendo en cuenta las expresiones (4.6.5.2) y (4.6.5.3), es posible calcular la longitud final de las
grietas, Lf:
α 2 (∆Tc )2 E
1
1
−
= 4GN L f − L0
(4.6.5.14)
2
2
2
2
2
1 + 2π NL f
1 + 2π NL0
(
) (
)
(
)
relación indicada en la figura 4.6.5.4 con línea discontinua.
102
En el caso de grietas cortas (L0 << Lm), se tiene que:
(1).-
(1 + 2π NL20 ) ≈ 0
(4.6.5.15)
(1 + 2π NL2f )
(2).- 1 + 2π NL20 ≈ 1
(4.6.5.16)
y, utilizando la ecuación (4.6.5.6), la longitud final viene dada por:
L f = ( 4π NL0 )
−1
(4.6.5.17)
Aplicando, igual que en el caso anterior, la relación de Griffith para grietas planas, se tiene que la
longitud final de las grietas inicialmente cortas es:
Lf ≈
σ 2f
(4.6.5.18)
GE
y, en el modelo tridimensional:
Sf ≈
σ 2f (1 − υ )
GE
(4.6.5.19)
por lo que se recuperan los parámetros R’’’ y R’’’’ de resistencia al choque térmico obtenidos
utilizando el criterio del balance energético.
R ''' =
E
σ f (1 − υ )
R '''' = GR ''' =
(4.6.5.20)
GE
σ f (1 − υ )
(4.6.5.21)
El modelo de Hasselman permite obtener, a partir de una única expresión que engloba la suma de
energías elástica y superficial, las siguientes soluciones:
(1).- Condición térmica para el inicio de la fractura, esto es: diferencia crítica de temperatura para la
propagación de grietas cortas ( 1 < Lm , Lm ≈ 1
). El parámetro que maximiza ∆Tc, es el mismo
N
que se obtenía en la aproximación termoelástica R. La ecuación de dimensiones de este parámetro
es:
[R] = T
(4.6.5.22)
por lo que, su significado físico es claro, el incremento de temperatura crítico es proporcional a R.
103
(2).-Grado de propagación cinética de las grietas cortas. El área a través de la que se propagan es
inversamente proporcional a la energía superficial necesaria para supropagación (G) y directamente
2
proporcional a la energía elástica acumulada (~σf /E). Los parámetros que minimizan el daño
sufrido por el material son los parámetros de resistencia al choque térmico R’’’ y R’’’’, definidos
utilizando para el estudio de la resistencia al choque térmico el criterio de balance energético. La
ecuación de dimensiones de R’’’’ es:
[R’’’’] = L
(4.6.5.23)
dimensiones debidas a que, en realidad, en la proporcionalidad entre el área a través de la cual se
propaga la grieta y R’’’’ hay un efecto de la microestructura del material que no está incluido en R’’’’.
En efecto:
S −f 1 = f ( N , L0 ) R ''''
(4.6.5.24)
(3).- Lo más novedoso de la teoría de Hasselman es que permite explicar el comportamiento que van a
tener las grietas largas (L > Lm), preexistentes en el material o fruto de la propagación cinética de
grietas cortas. La diferencia mínima de temperatura necesaria para propagar grietas largas es
proporcional al parámetro R st . Este parámetro tampoco tiene significado físico directo ya que su
ecuación dimensional es:
1
[ Rst ] = TL 2
(4.6.5.25)
∆Tc' = f ( N , L0 ) Rst
(4.6.5.26)
dado que:
Para correlacionar el comportamiento de los materiales refractarios con los parámetros derivados de la
teoría Unificada de Hasselman, es preciso tener en cuenta que el tipo de fractura depende no sólo del
tipo de material sino, también, de la densidad de grietas que colaboran a la fractura.
En el caso de calentamiento por radiación, se suele observar una sola grieta paralela a la cara caliente
y que se desarrolla hacia la superficie. En general, en este tipo de ensayos se encuentra correlación
entre una alta resistencia al choque térmico y los parámetros R’’’ o R’’’’, que describen el
comportamiento de grietas cuya propagación es cinética. Esta situación es similable a un material con
densidad de grietas baja en el que, el tamaño de grieta, Lm, límite entre fractura cinética y fractura
cuasiestática es grande (Figuras 4.6.5.3 y 4.5.6.4).
Un mismo material puede presentar los dos tipos de fractura (cinética y cuasiestática) dependiendo del
tipo de ensayo. Así materiales que presentan fractura cinética en el caso de calentamiento por
radiación pueden presentar una disminución gradual del módulo de rotura al aumentar la severidad del
choque térmico cuando éste se produce por enfriamiento. En el caso de enfriamientos bruscos, la
bondad relativa de los materiales refractarios frente al choque térmico suele ir ligada a altos valores
del parámetro R st o parámetros equivalentes, lo cual es explicable dado que a la fractura por
enfriamientos bruscos colaboran un alto número de grietas superficiales.
Pero, en muchos casos, si los materiales refractarios ensayados poseen una alta resistencia a la
fractura, el grado de daño sufrido presenta una correlación mejor con los parámetros R’’’ y R’’’’ que
con R st . Este resultado puede ser derivado asimismo de la teoría unificada de Hasselman ya que una
alta resistencia a la fractura equivale a tamaños iniciales de grieta, L0 , pequeños por lo que, la fractura
es de tipo cinético (Figuras 4.6.5.3 y 4.6.5.4).
104
Figura 4.6.5.4.- Curvas de Hasselman. En línea discontinua se muestra el tamaño final alcanzado por
grietas de tamaño menor que Lm.
En los ensayos realizados a nivel industrial, normalmente se somete a los materiales a ciclos y
gradientes. Las ventajas de este tipo de ensayos es que están más cerca de la realidad de las
condiciones de los materiales durante el uso y que magnifican el daño. Una desventaja clara es que su
interpretación teórica es más difícil.
Se ha encontrado tanto correlación entre el grado de daño sufrido por los materiales después de un
cierto número de ciclos y el parámetro R’’’’ como con el parámetro R st . En este caso, el número y el
tipo de grietas que se propagan durante la fractura del material son distintos durante el calentamiento y
el enfriamiento y pueden interaccionar. Además, las propiedades del material después de sufrir un
ciclo son diferentes a las del material original ya que, para choques de baja intensidad es de esperar
que los fenómenos subcríticos tengan gran importancia.
La teoría unificada de Hasselman permite explicar el comportamiento de los materiales recogido en la
figura 4.6.5.5 y, que no era posible analizar utilizando únicamente la aproximación termoelástica y el
criterio de balance energético (parámetros R y R’’’’). Estos materiales han sido ensayados vertiendo
acero fundido en una cuchara precalentada a distintas temperaturas y vaciando, a continuación, la
cuchara. En la tabla 4.6.5.1 se recogen los valores del parámetro de resistencia al choque térmico, R st ,
calculados para estos materiales.
El parámetro R st permite explicar las diferencias encontradas entre el comportamiento de los
materiales C (bauxita), D (alúmina electrofundida) y F (magnesita) ya que decrece en el mismo sentido
que lo hace ∆T’c. El incremento crítico de temperatura para estos materiales es del tipo ∆T’c (grietas
largas, figura 4.6.5.1) ya que la degradación que sufren los materiales es gradual.
105
Por otra parte, la teoría unificada de Hasselman predice la existencia de dos temperaturas críticas, en
el caso de materiales con longitudes de grietas pequeñas. Este es el caso del material A
(silicoaluminoso). La diferencia entre la forma de degradación del material A y de los materiales C, D
y F puede ser atribuida a la diferencia entre las resistencias a la fractura de estos materiales (Tabla
4.6.5.1), ya que esta es superior para el material silicoaluminoso. Sin embargo, no es posible predecir
en qué valor del módulo de rotura se encuentra el límite entre fractura cinética/fractura cuasiestática.
Los resultados de la teoría de Hasselman tiene implicaciones prácticas muy importantes en lo que se
refiere a la selección de materiales para trabajar en condiciones térmicas severas, bajo las que no es
posible evitar el inicio de la fractura por tensiones térmicas, o que contienen defectos de gran tamaño
en su interior. En este caso es preciso utilizar materiales con valores altos de los parámetros R’’’’ y
R st , condición que, en general, implica minimizar R.
Pero, además, las ecuaciones (4.6.5.7) y (4.6.5.18) indican que un material de baja resistencia a la
fractura será tanto más resistente al choque térmico cuantos mayores sean la densidad de grietas y el
tamaño de éstas.
En general, los estudios encaminados a comprobar la validez de los parámetros de Hasselman se
realizan comparando una serie de materiales para los que los parámetros de resistencia al choque
térmico calculados con propiedades globales de los materiales son muy diferentes. En estos casos,
como ha sido mencionado anteriormente, el acuerdo encontrado entre los resultados y la teoría es
relativamente bueno.
Sin embargo, los materiales refractarios se alejan en gran medida de las hipótesis de isotropía y
homogeneidad asumidas en la teoría Unificada de Hasselman.
Sería preciso desarrollar modelos en los que pudiera incluirse el efecto de las microtensiones
localizadas debidas a la gran diferencia que existe entre las propiedades de las distintas fases presentes
en un material cerámico. De hecho, es posible encontrar respuestas frente a las tensiones térmicas muy
diferentes para materiales refractarios con parámetros de Hasselman de valores equivalentes y
microestructuras muy diferentes. Este es un campo abierto en el que, previo a un desarrollo teórico, es
necesario un gran esfuerzo experimental sobre materiales modélicos con microestructura y
propiedades muy controladas.
106
Figura 4.6.5.5.- Variación del módulo de rotura de materiales refractarios sometidos a choques
térmicos de distinta intensidad. A: silicoaluminoso, C: bauxita, D: alúmina
electrofundida, F: magnesia.
Tabla 4.6.5.1.- Valores del parámetro de resistencia al choque térmico R st y del módulo de rotura para
los materiales cuyo comportamiento se recoge en la figura 4.6.5.5.
En la tabla 4.6.5.2 se resumen los parámetros de resistencia al choque térmico debidos a Hasselman.
Se puede observar que los efectos de E, σ y υ son opuestos para la iniciación de las grietas y para su
propagación.
107
Tabla 4.6.5.2.- Parámetros de resistencia al choque térmico debidos a Hasselman.
Choque térmico de materiales frágiles.
En los metales y polímeros dúctiles, las tensiones térmicas pueden aliviarse mediante deformación
plástica. Sin embargo, la falta de ductilidad de muchas cerámicas aumenta la posibilidad de fractura
frágil debido a estas tensiones. El enfriamiento rápido de un cuerpo frágil es más probable que inflija
mayor choque térmico que en el caso de calentamiento, puesto que las tensiones superficiales
inducidas son de tracción. La formación y propagación de grietas a partir de defectos superficiales son
más probables cuando se impone una tracción.
El choque térmico puede prevenirse alterando las condiciones externas de manera que las velocidades
de enfriamiento o calentamiento sean reducidas, para que los gradientes de temperatura a lo largo del
cuerpo sean mínimos. La modificación de las características térmicas y/o mecánicas de los materiales
puede también aumentar la resistencia al choque térmico de un material. De estos parámetros, el
coeficiente de dilatación térmica es probablemente el que puede ser cambiado y controlado más,
fácilmente.
Por ejemplo, los vidrios de sosa y cal, los cuales tienen un αl aproximadamente igual a 9 x 10-6 (°C)-1,
son particularmente susceptibles al choque térmico, tal como puede atestiguar cualquier persona que
los haya utilizado en un horno. Reduciendo los contenidos de CaO y Na2 O y añadiendo al mismo
tiempo B2 O3 en cantidades suficientes para formar vidrios de borosilicato (o sea, Pyrex) el coeficiente
de dilatación se reduce a alrededor de 3 x 10-6 (°C)-1 . Este material es muy adecuado para los ciclos de
calentamiento y enfriamiento de los hornos de cocina. La introducción de poros grandes o bien una
segunda fase dúctil puede aumentar las características de resistencia al choque térmico. Ambos
métodos sirven para impedir la propagación de fisuras inducidas térmicamente.
En cuanto al tamaño, para un mismo material las piezas pequeñas tienen mejor resistencia al choque
térmico que las más grandes. Así, las piezas grandes, que estén sometidas a cambios bruscos de
temperatura, es mejor hacerlas a partir de piezas pequeñas.
108
4.7.- Variación permanente de dimensiones (Postvariación dimensional).
La variación permanente de las dimensiones por acción del calor es la dilatación o contracción que
permanece en un producto refractario conformado que es calentado hasta una temperatura determinada
durante un tiempo dado y posteriormente, enfriado hasta temperatura ambiente.
La variación permanente de dimensiones (O irreversible) tiene su origen en que algunas de las
reacciones que se produjeron durante la sinterización cerámica (COCCION) del material refractario no
se pudieron concluir de forma total. Después de un calentamiento a elevadas temperaturas y
enfriamiento final, quedan frecuentemente deformaciones permanentes, tanto en el sentido de la
dilatación como en el de la contracción, denominadas postdilatación y postcontracción.
Resulta, pues, que un material refractario que no se ha cocido adecuadamente puede presentar un
grado de expansión lineal, positiva o negativa, irreversible (PERMANENTE) más elevado que otro de
la misma calidad que ha experimentado el proceso de cocción (Aglomeración cerámica)
adecuadamente (Completamente).
En general, todos los materiales refractarios experimentan una variación de dimensiones al recocerlos
durante un tiempo determinado a temperaturas iguales o superiores a las que estuvieron sometidos en
su fabricación (PROCESO DE COCCION). Así, un material refractario, en servicio prolongado en un
horno a alta temperatura, se ve sometido a:
- CAMBIOS EN LA COMPOSICION DE FASES CRISTALINAS (Formación de nuevos compuestos,
estados diferentes de oxidación, etc.)
- TRANSFORMACIONES POLIMÓRFICAS IRREVERSIBLES (Que no se han completado).
- FENOMENOS DE SINTERIZACION (Procesos de difusión).
- RECRISTALIZACIONES Y CRECIMIENTO DE GRANOS.
Como consecuencia de los fenómenos anteriores se producen cambios dimensionales permanentes
(± ∆V), cuyos efectos son:
POSTCONTRACCION (∆V<0).
1.2.3.4.-
Aumento de la densidad.
Mejor resistencia al ataque por escorias.
Mejor resistencia al desconchado.
Desplazamiento de la instalación refractaria (Las juntas de la mampostería se hacen más grandes,
con lo que se afloja y se producen fugas).
5.- Pérdida de aislamiento térmico.
POSTDILATACCION (∆V>0).
1.2.3.4.-
Tensiones entre piezas. (Rotura de la mampostería por cargas de presión).
Distorsiones en la forma geométrica.
Distribución no homogenea de las tensiones en la estructura
Disminución en la conductividad térmica.
109
La variación permanente de longitud de los materiales refractarios se puede influenciar. Así, para
conseguir materiales de VOLUMEN CONSTANTE, es preciso cocer, tanto las materias primas como
las piezas refractarias, de manera que a la temperatura exigida se produzca un estado de amplio
equilibrio.
Los ladrillos de chamota y de magnesia tienden, especialmente si la cocción es deficiente, a contraerse
(POSTCONTRACCION), mientras que los de sílice tienden a dilatarse (POSTDILATACION).
De cada ladrillo o pieza se cortan probetas en forma de prismas rectangulares o cilindros,
posteriormente se secan y se miden sus dimensiones lineales o su volumen. Se calientan las probetas
en un horno con atmósfera oxidante a una velocidad especificada, hasta una temperatura determinada
que se mantiene durante un tiempo dado. Tras dejar que se enfríen hasta temperatura ambiente, se
repiten las medidas sobre las probetas, y se calcula la variación permanente de las dimensiones o el
volumen.
Pueden utilizarse dos dispositivos de medida para las dimensiones lineales, bien una galga (método 1),
o un pie de rey (método 2). El método 1 debe utilizarse como método de referencia.
El dispositivo de medida de volumen (método3) será del tipo de desplazamiento de agua,
determinándose el volumen aparente.
Las probetas deben presentar una de las siguientes formas:
1.- Prismas rectangulares de base 50 mmx50 mmm y 60 60 mm de altura.
2.- Cilindros de 50 mm de diámetro y 60 mm de altura.
La tolerancia en todas las dimensiones debe ser igual a ± 2 mm.
La dimensión de 60 mm debería coincidir con la dirección de prensado de la pieza durante su
fabricación, si dicha dirección es conocida.
Antes de comenzar el ensayo, las caras de 50 mm x 50 mm del prisma, o las bases del cilindro, deben
pulirse para garantizar su planicidad y paralelismo.
Medida de las probetas
Medida lineal mediante la galga (método 1). Se calibra el dispositivo de medida lineal utilizando un
cilindro de longitud conocida. Se coloca la probeta en el porta-probetas, con la dimensión de 60 mm
en posición vertical. Para las probetas rectangulares, se alinea uno de sus ángulos con la marca
diagonal del porta-probetas, y se marca este ángulo de forma que la probeta pueda colocarse en la
misma posición para realizarla medida tras su calentamiento. Se marcan las probetas cilindricas en
relación a la marca diagonal.
Se mide la longitud de la probeta en cuatro puntos, con una exactitud de 0.01 mm. desplazando el
porta-probetas con la probeta sobre la base del soporte. Para probetas rectangulares, los cuatro puntos
deben situarse en las diagonales, a una distancia de 20 mm a 25 mm de cada ángulo. Para las probetas
cilindricas, estos cuatro puntos se sitúan de 10 mm a 15 mm del perímetro, sobre dos diámetros que
formen un ángulo recto. Se registra cada punto de medida.
Medida lineal con la ayuda de un pie de rey (método 2). Se mide la longitud de la probeta utilizando
un pie de rey con una exactitud de ± 0.02 mm. Se mide la longitud en tres posiciones, utilizando los
puntos de medida indicados en la figura 4.7.1, Se marcan las posiciones en las que se realizan las
medidas, bien con pintura refractaria o realizando pequeñas muescas a lo largo de los bordes de las
probetas (Figura 4.7.1).
110
Figura 4.7.1.- Posiciones de medida utilizando un pie de rey
Medida del volumen (método 3). Se determina la densidad aparente de la probeta conforme a la
NormaEN 993-1.
Se calcula el volumen aparente, VB , en centímetros cúbicos, a partir de las medidas obtenidas,
utilizando la siguiente ecuación:
m − m1
VB = 2
(4.7.1)
ρL
donde
m 1 = Masa aparente de la probeta sumergida, en gramos.
m 2 = Masa de la probeta impregnada, en gramos.
ρ L = Densidad del líquido de inmersión, en gramos por centímetro cúbico,
Disposición de las probetas en el horno.
Se colocan las probetas en el horno, cada una reposando sobre su cara de 50 mm x 50 mm (para los
prismas) o sobre uno de sus extremos (para los cilindros), y protegidas de la radiación directa en el
caso de hornos eléctricos, o de la llama del quemador, en el caso de hornos de gas. No se deben
superponer las probetas. Para permitir la libre circulación de los gases calientes, las probetas deben
estar separadas entre sí una distancia no inferior a 20 mm, y no deben colocarse a menos de 50 mm de
las paredes del horno.
Las probetas deben colocarse en el horno sobre ladrillos, de 30 mm a 65 mm de espesor, fabricados
con el mismo material que aquéllas. Los ladrillos deben descansar sobre los vértices de dos soportes de
sección triangular, de 20 mm a 50 mm de altura y separados unos 80 mm.
111
112
113
5.- Propiedades mecánicas.
5.1.- Introducción.
Muchos materiales, cuando prestan servicio, están sometidos a fuerzas o cargas, ejemplos de ello son
los revestimientos refractarios de los hornos, las aleaciones de aluminio con las cuales se construyen
las alas de los aviones, el acero de los ejes de los automóviles o las vigas y pilares de los edificios. En
tales situaciones es necesario conocer las características del material y diseñar la pieza de tal manera
que cualquier deformación resultante no sea excesiva y no se produzca la rotura. El comportamiento
mecánico o las propiedades mecánicas de un material reflejan la relación entre la fuerza aplicada y la
respuesta del material (o sea, su deformación). Algunas de las propiedades mecánicas más importantes
son la resistencia, la dureza, la ductilidad y la rigidez.
La respuesta de los materiales a las fuerzas aplicadas depende de
1.- Tipo de enlace.
2.- Disposición estructural de los átomos o moléculas.
3.-Tipo y número de imperfecciones, que están siempre presentes en los sólidos, excepto en raras
circunstancias.
Así, fijada la solicitación exterior es evidente que la deformación que se origina y, en consecuencia, la
tensión creada en el sólido elástico dependen de las fuerzas de atracción molecular, es decir, de la
estructura cristalina del material.
A pesar de la considerable complejidad de los materiales ingenieriles todos los materiales sometidos a
cargas se pueden clasificar en tres grupos principales de acuerdo con el mecanismo que ocurre durante
su deformación bajo las fuerzas aplicadas
(I).- MATERIALES ELASTICOS (Por ejemplo, los cristales iónicos y covalentes).
(II).- MATERIALES ELASTOPLASTICOS (Por ejemplo, los metales estructurales).
(III).- MATERIALES VISCOELASTICOS (Por ejemplo, los plásticos, los vidrios).
A su vez los tipos básicos de deformación de los materiales como respuesta a las fuerzas aplicadas son
tres
1.- ELASTICO.
2.- PLASTICO.
3.- VISCOSO
Los materiales refractarios en servicio están sujetos a fuertes tensiones mecánicas debidas, en la mayor
parte de los casos, a las dilataciones de la mampostería refractaria (Fuerzas debidas a la expansión
térmica), como es el caso de los refractarios en el horno de cemento. La mayor o menor capacidad de
un material para absorber dichas tensiones, deformándose sin romperse, será una de las causas de
buen comportamiento del material refractario en las instalaciones.
Los elementos de un cuerpo tienden a dilatarse o contraerse cuando se calientan o se enfrían
respectivamente, y las deformaciones que se presentan se denominan deformaciones unitarias
térmicas. Si los elementos se pueden deformar libremente, las deformaciones unitarias térmicas no
vienen acompañadas de tensiones, pero si se restringe la deformación, como ocurre en el caso de la
mampostería refractaria, aparecen tensiones térmicas.
114
Las deformaciones unitarias térmicas vienen dadas por:
ε=
L − L0
= α∆T
L0
(5.1.1)
donde:
α = Coeficiente de dilatación lineal del material.
∆T= Cambio de temperatura.
L = Dimensión final.
L0 = Dimensión inicial.
Asumiendo que la mampostería refractaria esta totalmente restringida, es decir los elementos no
pueden variar sus dimensiones en la magnitud:
∆ L = ε0 L0 = αL0 ∆ T
(5.1.2)
su dimensión final será la misma que la inicial.
La tensión térmica, σt , como se muestra en la figura 5.1.1, puede calcularse usando la curva tensióndeformación unitaria del material. Asumiendo un modulo de elasticidad igual a E e igual a la tangente
a la curva en el punto M (Intersección de la curva con la recta vertical ε = ε0 ), la tensión térmica viene
dada por:
σ t = ε 0 E = α E ∆T
(5.1.3)
Figura 5.1.1.- Carga controlada por la deformación.
Las propiedades mecánicas de los materiales son muy sensibles a las operaciones y proceso de
fabricación.
Los ingenieros de materiales y los metalúrgicos, por otro lado, dirigen sus esfuerzos a producir y
conformar materiales que puedan soportar las condiciones de servicio predichas por el análisis de
tensiones. Esto necesariamente implica un conocimiento de la relación entre la microestructura (es
decir, los detalles internos) de los materiales y sus propiedades mecánicas.
115
5.2.- Conceptos de esfuerzo deformación.
Si una fuerza o carga es estática o bien cambia de forma relativamente lenta con el tiempo y es
aplicada uniformemente sobre una sección o superficie de una pieza, el comportamiento mecánico del
material puede ser estimado mediante un simple ensayo esfuerzo - deformación. Por tanto, para
obtener la relación entre tensión y deformación tendremos que proceder necesariamente por vía
experimental mediante ensayos realizados en el laboratorio, en donde se comprueba, en efecto, que
para dos piezas de distintos materiales, de iguales dimensiones y sometidas al mismo estado de cargas,
las deformaciones son distintas.
En los ensayos de compresión y de tracción el esfuerzo, σ , se mide como la fuerza, F, actuando por
unidad de área (A) , es decir:
F
σ=
(5.2.1)
A
La alteración de la forma o dimensiones de un cuerpo como resultado de las tensiones se denomina
deformación. Existen tres principales maneras de aplicar la carga, a saber: tracción, compresión y
cizalladura ( Figuras 5.2.1 a, b, c ). En las aplicaciones de ingeniería, muchas cargas son torsionales
más que de cizalladura pura. Este tipo de carga se ilustra en la figura 5.2.1.d.
Puesto que existen esos tipos principales de tensión darán lugar a deformaciones de tracción,
compresión , cizalladura y de torsión.
La deformación por tracción viene dada por:
y la de compresión:
εt =
L − L0
=
∆L
L0
L0
L − L ∆L
εc = 0
=
L0
L0
(5.2.2)
(5.2.3)
Los esfuerzos de tracción causan en la pieza una elongación perpendicular a su propia dirección,
mientras que los de compresión dan lugar a una contracción.
En los ensayos en que se utiliza simplemente una fuerza de cizalladura tal como se muestra en la
figura 5.2.1.c, la tensión de cizalladura τ se calcula de acuerdo con:
τ=
F
Ao
(5.2.4)
donde F es la carga o fuerza impuesta paralelamente a las caras superior e inferior, cada una de las
cuales tiene un área A0 . La deformación de cizalladura γ se define como la tangente del ángulo de
deformación θ, tal como se indica en la figura 5.2.1.c, y , viene dada por la relación:
γc =
aa´
= tg (θ )
ad
(5.2.5)
donde el ángulo θ es el resultante del cambio de inclinación de un cierto plano sujeto a una tensión
cortante pura, τ, y una línea perpendicular a este. El segmento aa’ es el deslizamiento horizontal del
lado ab con respecto al lado cd. La tensión cortante es equivalente al estado tensional producido por
una tracción en una dirección e igual compresión en la dirección perpendicular.
Las unidades de tensión y deformación de cizalladura son las mismas que las correspondientes de
tracción.
116
La torsión es una variación de la cizalladura pura, mediante la cual un miembro estructural es
deformado de la forma mostrada en la figura 5.2.1.d. Las fuerzas de torsión producen un movimiento
rotacional alrededor del eje longitudinal de un extremo del miembro respecto al otro extremo.
Ejemplos de torsión se encuentran en el caso de ejes de máquinas y ejes impulsores, y también en
brocas.
Los ensayos de torsión generalmente se realizan sobre cilindros sólidos, o bien sobre tubos. La tensión
de cizalladura τ es una función del par aplicado T, es decir τ = f(T), mientras que la deformación de
cizalladura γ está relacionada con el ángulo de giro, Φ de la figura 5.2.1.d y viene dada por:
γt =
Φr
2ML
Φ =
L
π R 4G
(5.2.6)
G = Módulo de cizalladura, M = Momento del par = TR
La tensión y la deformación de cizalladura son proporcionales entre sí según la expresión:
τ = Gγ
(5.2.7)
donde G es el módulo de cizalladura, o sea, la pendiente de la región elástica de la curva tensióndeformación de cizalladura.
Figura 5.2.1.- (a).- Ilustración esquemática de como una carga de tracción produce un alargamiento y
una deformación lineal positiva. Las líneas discontinuas representan la forma antes de la
deformación y las sólidas, después de la deformación. (b).- Ilustración esquemática de como
una carga de compresión produce una contracción y una deformación lineal negativa. (c).Representación esquemática de la deformación de cizalladura, y, donde γ = tg(θ) (d).Representación esquemática de una deformación torsional (o sea, ángulo de giro Φ) producido
por un par aplicado T.
117
Figura 5.2.1.- Estados comunes de tensión.
118
Figura 5.2.1.- Estados comunes de tensión.
Cuando sobre un material se aplica una tracción, se produce un alargamiento elástico y una
deformación εz en la dirección de la carga aplicada (la cual se tomará arbitrariamente como la
dirección z), tal como se indica en la figura 5.2.2. Como resultado de este alargamiento, se producirán
contracciones en la direcciones laterales (x e y) perpendiculares a la dirección de la aplicación de la
tensión. A partir de dichas contracciones, se pueden determinar las deformaciones de compresión εx y
ε y.
Se define un parámetro denominado coeficiente de Poisson como el cociente entre las deformaciones
laterales y axiales, o sea,
υ=−
εy
εx
=−
εz
εz
(5.2.8)
El signo negativo se incluye en la expresión para que ν s ea siempre positivo, puesto que εx y ε y
siempre son de signo opuesto a εz.
El módulo de cizalladura y el módulo elástico están relacionados entre sí y con el módulo de Poisson
mediante la relación:
E = 2G (1 + υ )
(5.2.9)
119
Figura 5.2.2.- Alargamiento axial (z) (deformación positiva) y contracciones laterales (x e y) en
respuesta a una tracción aplicada. Las líneas continuas representan las dimensiones
después de aplicación de la carga y las discontinuas, antes.
4.3.- Curvas tensión – deformación.
Las curvas tensión - deformación, usualmente, se obtienen mediante ensayos de laboratorio realizados
mediante normas estandarizadas y utilizando probetas también estandarizadas. Se fijan la velocidad de
carga y la temperatura.
Los ensayos se pueden realizar con cargas de compresión, tracción, flexión y cortadura, que a su vez
pueden ser estáticas o dinámicas. Los ensayos de compresión, tracción y flexión con cargas estáticas
son los que mas se suelen realizar.
Los ensayos de TRACCION se realizan con los MATERIALES DUCTILES con un cierto grado de
plasticidad, tales como los materiales metálicos ferrosos y no ferrosos, plásticos, gomas, fibras, etc.
Los ensayos de COMPRESION Y FLEXION se realizan con los MATERIALES FRAGILES, tales
como los materiales refractarios, el hormigón, cerámicos, etc. Estos materiales poseen una baja
resistencia a la tracción en comparación con la de compresión.
En la figura 5.3.1, puede verse la forma general de la curva tensión - deformación de un material dúctil
y la de un material frágil. Se puede observar que los materiales dúctiles rompen después de
experimentar una deformación apreciable, mientras que los materiales frágiles rompen después de
pequeñas deformaciones. En la figura 5.3.2 se muestra la curva tensión – deformación del acero y en
la figura 5.3.3 la de un material refractario con un 70 % de Al2 O 3 en función de la temperatura y
ensayado a compresión.
Las curvas tensión - deformación nos permiten determinar las principales características mecánicas de
los materiales, Así, se pueden estimar una serie de importantes propiedades tales como:
1.2.3.4.5.-
RESISTENCIA.
RIGIDEZ
DUCTILIDAD.
RESILIENCIA.
TENACIDAD.
120
Figura 5.3.1.- Representación esquemática de los diagramas de tracción de materiales frágiles y
dúctiles ensayados hasta la fractura.
Figura 5.3.2.- Diagrama tensión - deformación de un acero sometido a tracción.
Figura 5.3.3.- Diagrama tensión - deformación de un material refractario con un 70 % de Al 2 O3 en
función de la temperatura y ensayado a compresión.
121
El modulo de elasticidad de un material nos define la mayor o menor capacidad de un material de
deformarse bajo tensiones y puede ser interpretado como la RIGIDEZ del material, es decir, su
resistencia a la deformación elástica, de tal modo que cuanto mayor es el modulo mas rígido es el
material, o sea, menor es la deformación elástica que se origina cuando se aplica una determinada
tensión σ.
A escala atómica la deformación elástica macroscópica se manifiesta como pequeños cambios en el
espaciado intraatómico y así los enlaces entre átomos son estirados. Por tanto, la magnitud del modulo
de elasticidad es una medida de la resistencia a la separación de los átomos contiguos. Esto depende de
dos factores, que son especialmente importantes:
1.- Las fuerzas de enlace intraatómicas, que mantienen unidos a los átomos actuando como pequeños
muelles. Existen enlaces primarios (IONICO, COVALENTE Y METALICO), que son todos
relativamente fuertes y dan puntos de fusión entre 750 y 4750 °C y enlaces secundarios (VAN DER
WAALS Y PUENTES DE HIDROGENO), que son relativamente débiles y dan puntos de fusión
entre -150 y 250 °C .
2.- El empaquetamiento atómico, que determina cuantos pequeños muelles hay por unidad de área y el
ángulo en que ellos son estirados El empaquetamiento esta fuertemente influenciado por el tipo de
enlace.
Los valores del módulo de elasticidad de las cerámicas en general son mayores que los valores de los
metales y para los polímeros son menores. Estas diferencias son una consecuencia directa de los
distintos tipos de enlace atómico en estos tres tipos de materiales.
5.4.- Tipos de Rotura.
La resistencia a la rotura no es una propiedad, sino el resultado de un ensayo que da la tensión o carga
necesaria por unidad de sección para producir la rotura del metal ensayado. Como la rotura de un
metal puede producirse por tracción, por compresión, por torsión o por cizalladura. Entonces habrá
una resistencia a la rotura por tracción, otra por compresión, otra por torsión y otra por cizalladura.
La fractura o rotura simple es la separación de un cuerpo en dos o mas piezas en respuesta a una
tensión aplicada estática (es decir, constante o que cambia lentamente con el tiempo) y a temperaturas
que son relativamente bajas en comparación con la temperatura de fusión del material. Se comentarán
las fracturas que resultan de cargas de tracción uniaxiales.
En los materiales de ingeniería, existen dos tipos de fractura: dúctil y frágil. La clasificación esta
basada en la capacidad del material para experimentar deformación plástica. Los materiales dúctiles
exhiben normalmente una deformación plástica substancial con muy alta absorción de energía antes de
la fractura. Por otro lado, en la rotura frágil existe normalmente poca o ninguna deformación plástica
con poca absorción de energía en el proceso de rotura.
Cualquier proceso de fractura esta compuesto de dos etapas -la formación y la propagación de una
fisura- en respuesta a una tensión aplicada. El modo de fractura depende mucho del mecanismo de
propagación de la grieta. La fractura dúctil se caracteriza por la existencia de mucha deformación
plástica en la vecindad de la grieta que avanza. Además, el proceso tiene lugar lentamente a medida
que la grieta se extiende. Una grieta de este tipo se suele decir que es estable. Es decir, se resiste a su
extensión a menos que se aumente la tensión aplicada. Además, hay evidencia de deformación plástica
apreciable en las superficies de fractura (por ejemplo, retorcimiento y desgarre).
Por el contrario, en el caso de la fractura frágil, las grietas pueden extenderse de forma muy rápida,
con muy poca deformación plástica. Tales grietas se denominan inestables, y la propagación de la
grieta, una vez iniciada, continúa espontáneamente sin un aumento en la tensión aplicada.
122
La fractura dúctil es siempre preferida por dos razones. En primer lugar, la fractura frágil ocurre de
forma súbita y catastrófica sin ningún síntoma previo. Esto es consecuencia de la propagación rápida y
espontánea de la grieta. Además, en el caso de fractura dúctil la presencia de deformación plástica es
un síntoma de que la fractura es inminente, siendo así posible tomar medidas preventivas. En segundo
lugar, para inducir la fractura dúctil se requiere más energía de deformación ya que los materiales
dúctiles generalmente son más tenaces. Bajo la acción de una tensión aplicada, la mayoría de los
metales son dúctiles, mientras que las cerámicas son notablemente frágiles y los polímeros pueden
exhibir ambos tipos de fractura.
Fractura dúctil.
Las superficies de fractura dúctiles tienen sus propios rasgos tanto a nivel microscópico como
microscópico. La figura 5.4.1 muestra esquemáticamente dos perfiles microscópicos característicos de
fractura. La configuración mostrada en la figura 5.4.1.a se encuentra en metales muy blandos, tales
como oro y plomo a temperatura ambiente, y en otros metales, polímeros y vidrios inorgánicos a
temperaturas elevadas. Estos materiales son muy dúctiles y se rompen cuando la estricción se reduce
prácticamente a un punto, presentando una reducción de área virtualmente igual al 100%.
El tipo mas común de perfil de fractura a tracción en los materiales dúctiles es el representado en la
figura 5.4.1.b, en la cual la fractura es precedida por solo una cantidad moderada de estricción.
El proceso de fractura normalmente ocurre en varias etapas (Figura 5.4.2). En primer lugar, después de
iniciarse la estricción, se forman pequeñas cavidades, o microcavidades, en el interior de la sección,
tal como se indica en la figura 5.4.2.b. A continuación, a medida que la deformación aumenta, estas
microcavidades se hacen mayores, se juntan y coalescen para formar una grieta elíptica, la cual tiene
su eje mayor perpendicular a la dirección de la fuerza aplicada. La grieta continua creciendo en una
dirección paralela a su eje mayor mediante este proceso de coalescencia de microcavidades (Figura
5.4.2.c).
Finalmente, se produce la fractura por la rápida propagación de una grieta alrededor del perímetro
exterior de la estricción (Figura 5.4.2.d), por deformación de cizalladura formando un ángulo de
alrededor de 45° con respecto al eje de tracción, o sea, el Angulo en el cual la tensión de cizalladura es
máxima. Algunas veces, una fractura que tiene este contorno característico se denomina fractura copacono debido a que una de las superficies tiene la forma de una copa y la otra la de un cono.
Figura 5.4.1.- (a).- Fractura muy dúctil en la cual la probeta experimenta estricción hasta llegar a un
punto. (b).- Fractura moderadamente dúctil después de cierta estricción. (c).- Fractura
frágil sin ninguna deformación plástica.
123
Figura 5.4.2.- Etapas en la fractura copa-cono. (a).- Estricción inicial. (b).- Formación de pequeñas
cavidades. (c).- La coalescencia de cavidades forma una grieta. (d).- Propagación de
la grieta. (e).- Fractura final por cizalladura a un ángulo de 45° respecto a la dirección
de la tensión.
En resumen, las características de las roturas dúctiles son:
* La rotura produce un cono a 45°.
* Observando el gráfico de la figura 5.4.3 se observa:
- Tiene un gran alargamiento en el periodo de estricción y rotura.
- La diferencia entre el límite de proporcionalidad y tensión de rotura es muy grande.
- Tiene un gran periodo plástico.
Figura 5.4.3.- Características de las roturas dúctiles.
124
Fractura frágil.
La fractura frágil ocurre sin apreciable deformación plástica, y por propagación rápida de una grieta.
La dirección del movimiento de la grieta es casi perpendicular a la dirección de la tensión aplicada y
produce una superficie de fractura relativamente plana, tal como esta indicado en la figura 5.4.1 .c.
Las superficies de fractura de los materiales que se han roto de una manera frágil tienen sus propios
detalles característicos; cualquier signo de deformación plástica importante esta ausente. La fractura
frágil en materiales amorfos, tales como vidrios cerámicos, produce una superficie lisa y brillante.
En la mayoría de los materiales cristalinos frágiles, la propagación de la grieta corresponde a la
sucesiva y repetida rotura de enlaces atómicos a lo largo de planos cristalográficos. Tal proceso se
denomina descohesión. Este tipo de fractura se dice que es transgranular (o transcristalina), debido a
que las grietas pasan a través de los granos (Figura 5.4.4). En algunos materiales, la propagación de la
grieta ocurre a lo largo de los bordes de grano, con lo que fractura se denomina intergranular (Figura
5.4.4).
Figura 5.4.4.- Mecanismos de fractura. (a).-Descohesión transgranular (Clivaje)
(b).- Fractura intergranular
En resumen, las características de las roturas frágiles son:
* Prácticamente no tiene cono de rotura. No hay apenas estricción.
* La rotura es de 90° respecto al eje.
* Observando el gráfico de la figura 5.4.4 se tiene:
- Desaparece el periodo plástico. El alargamiento es muy corto.
- El periodo de estricción y rotura es muy corto.
- La diferencia entre el punto A y el punto B es muy corta.
Estos dos casos son los casos extremos, los demás casos se comprenden entre estos dos.
125
Figura 5.4.4.- Características de las roturas frágiles.
Factores de los que dependen las roturas:
(a).- Temperatura:
Actualmente se realizan ensayos en diferentes temperaturas (horno y aparato que produce frío-gas)
* Comportamiento en frío: A medida que se enfríe el periodo plástico va desapareciendo, se convierte
de material dúctil a frágil. El límite elástico se aproxima a la tensión de rotura.
* Comportamiento en caliente ( Figura 4.4.5): Aumenta el periodo plástico, disminuye la tensión de
rotura.
Figura 5.4.5.- Influencia de la temperatura en el comportamiento del material frente a la rotura
(b).- Velocidad:
Al aumentar la velocidad diminuimos el periodo plástico. No cambia la Tensión de Rotura.
(c).- Estructura Cristalina:
- Grano grande y abierto. El material rompe antes, NO hay periodo plástico.
- Grano pequeño y cerrado. Hay periodo plástico, el material rompe más tarde.
126
5.5.- Ensayos de resistencia: compresión, tracción y flexión.
5.5.1.- Resistencia a compresión en frio.
La resistencia a la compresión en frío, σcf , ha sido considerada como uno de los máximos exponentes
de la resistencia mecánica general de un material refractario. Sin embargo, hoy en día no se considera
tan importante porque las roturas a compresión representan una pequeña proporción de los problemas
que aparecen en la construcción de hornos. De cualquier forma, resulta útil como comprobación
indirecta de otras propiedades y porque puede poner de relieve defectos de fabricación
La resistencia a la compresión en frío tiene gran importancia, por ejemplo, en:
- Los hogares de combustión en donde un ladrillo con una resistencia a la compresión en frío elevada
es más resistente a los golpes de barras o la limpieza de escorias, que uno que la tenga baja.
- Las chimeneas donde tienen que soportar el peso de todos los refractarios que están encima.
La resistencia a la compresión en frío guarda una estrecha relación con las siguientes propiedades y
características (Tabla 5.5.1.1):
- POROSIDAD (COMPACIDAD).
- GRADO DE VITRIFICACION DEL CONSTITUYENTE MATRIZ.
- VISCOSIDAD DE LA FASE VITREA.
Una menor porosidad influye favorablemente. Esta es mínima en los materiales refractarios
electrofundidos y es elevada en los refractarios aislantes que, por lo tanto, presentan resistencias a la
compresión en frío limitadas (2 - 10 N/mm 2 ), aunque por otra parte hay que tener en cuenta que al ser
más ligeros estan sometidos a una presión menor.
Los ladrillos de chamota conformados plásticamente deberán tener una resistencia mínima a la
compresión en frío de 10-15 N/mm 2 , mientras que en los ladrillos de chamota dura conformados en
seco deberá ser sobre 30 a 50 N/mm 2 y en casos especiales hasta superior a 70 N/mm2 . La resistencia a
la compresión en frío de los ladrillos de sílice alcanza de 20 a 30 N/mm 2 , en los ladrillos aluminosos y
de magnesia con alto contenido en hierro se sitúa ésta entre 30 y 150 N/mm2 . La máxima resistencia,
que llega a rebasar los 200 N/mm 2 , se alcanza con los ladrillos de carburo de silicio y aluminosos de
alta calidad.
A su vez un menor grado de vitrificación del constituyente matriz tambien influye favorablemente. Las
zonas donde exista fase vitrea son más debiles y, por tanto, son posibles zonas donde se inicie la
fractura (Figura 5.5.1.1).
La extensión del grado de vitrificación se puede reducir mediante un recocido a alta temperatura
(Aumenta la cristalización). Sin embargo, este tratamiento influye desfavorablemente sobre la
resistencia al choque térmico, por lo que una alta resistencia a la compresión en frío supone, en
general, una baja resistencia al choque térmico. Aunque, una resistencia alta a la compresión en frio no
siempre supone una resistencia baja a los cambios bruscos de temperatura.
Finalmente, una mayor viscosidad de la fase vitrea influye favorablemente. La viscosidad de la fase
vítrea se puede aumentar mediante aditivos.
127
Tabla 5.5.1.1.- Información de la resistencia a la compresión en frío. Factores favorables.
Figura 5.5.1.1.- Posible zona de iniciación de la fractura.
La resistencia a la compresión en frío se determina según la norma UNE EN 993-5 y se define como el
cociente entre la carga máxima F, aplicada en condiciones especificadas a temperatura ambiente, que
puede resistir un producto refractario sin destruirse, y la sección inicial de la probeta S 0 , es decir:
σ cf =
F (N )
(
S0 mm 2
)
(5.5.1.1)
2
Se expresa en N/mm (MPa).
Una probeta de dimensiones conocidas se somete, en condiciones especificadas, a una carga de
compresión que aumenta progresivamente hasta que la probeta rompe, es decir, hasta el momento en
que no puede resistir un nuevo aumento de la carga.
128
Las probetas serán de forma cilindríca de 50 ±0.5 mm de diámetro por 50 ±0.5 mm de altura, sacadas
por taladro del centro de la pieza refractaria en la misma dirección en que haya actuado el prensado
durante su fabricación, si se conoce, y luego cortadas. Las bases serán paralelas entre si y
perpendiculares al eje de la probeta, alisándose por amolado con una máquina rectificadora. Se
rechazarán las probetas que presenten defectos evidentes.
En casos excepcionales, cuando el tamaño o formato de las piezas refractarias no permita extraer las
probetas de las dimensiones citadas, se utilizarán probetas cilindrícas de 36 ± 0.3 mm de diámetro por
36 ± 0.3 mm de altura.
Tambien se pueden utilizar cubos de 50 ±0.5 mm de lado.
Como esta propiedad mecánica presenta, habitualmente, una gran dispersión el número de probetas a
ensayar de cada tipo de refractario no será nunca inferior a 5. Para reducir al mínimo la dispersión de
los resultados y lograr una mejor repetibilidad es necesario preparar las probetas cuidadosamente. En
la figura 5.5.1.2, se puede ver la forma y las dimensiones de las probetas, así como sus tolerancias
respectivas.
Figura 5.5.1.2.- Forma y las dimensiones de las probetas, así como sus tolerancias respectivas.
129
Las dimensiones y tolerancias son:
-
En
En
En
En
diámetro y altura de las probetas cilindricas: ± 0.5 mm ( ± 0.3 mm ) .
el lado de la cúbica: ± 0.5 mm
perpendicularidad del eje de la probeta a las bases: desviación menor de 0.5 mm.
el paralelismo de las bases: desviación igual o menor de 0.3 mm.
Las tolerancias anteriores se verifican del modo siguiente:
- La planicidad de las bases se comprobará con ayuda de un papel de carbón colocado sobre una
superficie perfectamente plana y sobre el cual se colocarán las bases de la probeta. Cada uno de ellas
debe ser presionada con una carga de 3 kN ± 1 kN sobre la placa de nivel recubierta con papel carbón
o con papel de ferroprusiato y papel de filtro duro (de 0,15 mm de espesor). Las probetas que no
presenten dos impresiones completas y coloreadas de forma claramente visible deben pulirse de nuevo
(Figuras 5.5.1.3. a 5.5.1.6 para ejemplos de probetas cilindricas).
Figura 5.5.1.3.- Huella sobre papel carbón o de ferroprusiato. Resultados aceptables
Figura 5.5.1.4.- Huella sobre papel carbón o de ferroprusiato. Resultados aceptables
130
Figura 5.5.1.5.- Huella sobre papel carbón o de ferroprusiato. Resultados no aceptables
Figura 5.5.1.6.- Huella sobre papel carbón o de ferroprusiato. Resultados no aceptables debido a la
presencia de estrías visibles tras el corte o pulido
- La perpendicularidad del eje de la probeta a las bases se comprobará situándola de pie sobre una
superficie perfectamente plana y aplicando una escuadra sobre una generatriz. La holgura entre
cualquiera de las generatrices y la rama vertical de la escuadra, no deberá sobrepasar la tolerancia, que
es de 0.5 mm.
- El paralelismo de las bases se comprobará realizando cuatro medidas de la altura de la probeta,
equidistantes. Para las probetas cilindricas las medidas se deben realizar entre los extremos de dos
diámetros perpendiculares, y para las cúbicas en las en las cuatro aristas entre las caras que soportan la
carga. La diferencia entre la medida máxima y la mínima, no deberá exceder a la tolerancia fijada, que
es de 0.2 mm.
La máquina de ensayos será una prensa hidráulica o mecánica (Figura 5.5.1.7), que disponga de varias
escalas de manera que se pueda escoger la apropiada, según el valor medio del ensayo a efectuar, de
forma que ningún resultado individual quede por debajo de la décima parte del valor máximo de la
gama de medida empleada. Debe permitir la aplicación de la carga de una manera continua y
progresiva.
131
Figura 5.5.1.7.- Máquina para el ensayo de resistencia a la compresión en frío.
Entre los platos de la prensa se situará el dispositivo de compresión (Figura 5.5.1.8), en el cual uno de
los platos de presión estará montado sobre una rótula, con el fin de repartir de forma uniforme la carga
y adaptarse al posible no paralelismo de las bases. Se coloca la probeta, centrada entre los platos de la
prensa.
Figura 5.5.1.8.- Dispositivo para determinar la resistencia a la compresión en frío
132
Cada probeta, previamente secada, se coloca en el dispositivo de compresión, el cual a su vez estará
colocado entre los platos de la prensa. A continuación, se selecciona la escala de carga de tal forma
que la carga de rotura esperada sea superior al 10 % del valor de la escala y se somete a la probeta a un
-1
-1
esfuerzo continuado de compresión, con una velocidad de carga de 1 MPa.s ± 0.1 MPa.s , hasta que
la probeta rompe, es decir, hasta que no es capaz de soportar la carga Se registra el valor de la carga
máxima
Entre las bases de la probeta y las placas de presión, no debe intercalarse ningún material, tales como
cartón, papel, goma, etc., que pueda ejercer un efecto de almohadillado o tambien un esfuerzo lateral.
Se expondrán todos los resultados obtenidos, precisando la forma en que han sido tomadas las probetas
y la dirección en que se ha aplicado la carga. El resultado del ensayo será el valor medio de los
resultados individuales.
Si el ensayo se ha realizado con probetas de formato diferente al normal, se deberá indicar en el
informe.
En la figura 5.5.1.9 se pueden ver las curvas tensión-deformación obtenidas en el ensayo de resistencia
a la compresión de un ladrillo aluminoso con un 70 de Al 2 O3 , para diversas temperaturas.
Figura 5.5.1.9.- Curvas tensión-deformación a la compresión de un ladrillo aluminoso con un 70 % de
Al 2 O3 ,
133
5.5.2.- Resistencia a la tracción.
Esta prueba es realizada muy pocas veces, variando mucho la forma de las probetas según la máquina
que se emplee, no estando normalizado en casi ningún país. La resistencia a la tracción de los
materiales refractarios varía entre 1/8 y 1/57 de la resistencia a la compresión, tomándose como
término medio 1/28 de la resistencia a la compresión.
No se suele hacer debido al alto coste de la preparación de la probeta a ensayar y por otro que se
requiere un alineamiento extremadamente bueno de la dirección de la carga y del eje de la probeta
durante el ensayo, ya que cualquier desalineamiento introduce tensiones de flexión lo que hace que la
medida de la resistencia a la tracción sea incierta. En la figura 5.5.2.1 puede verse una posible forma
de la probeta y del dispositivo de tracción.
Figura 5.5.2.1.- Posible forma de la probeta y del dispositivo de tracción.
Existe un método para determinar la resistencia a tracción indirecta (Ensayo brasileño) sobre probetas
cilíndricas, que también se puede usar para probetas cúbicas o prismáticas. En el caso de la probeta
cilíndrica se le somete a una fuerza de compresión aplicada en una banda estrecha y en toda su
longitud. El resultado de la fuerza de tracción ortogonal resultante origina que la probeta rompa a
tracción.
En la figura 5.5.2.2 pueden verse los dispositivos de ensayo para probetas cilíndricas y prismáticas.
Las bandas de apoyo son de fibras prensadas de densidad > 900 y dimensiones, ancho a = 10 mm.,
espesor t = 4 mm y una longitud superior a la línea de contacto de la probeta. Las bandas de apoyo
solo deberán usarse una vez.
Durante el ensayo debe asegurarse que la probeta permanece centrada cuando comienza la carga y
durante la aplicación de esta el plato superior ha de estar paralelo con el inferior. Se selecciona un
incremento de tensión constante dentro del rango, por ejemplo, de 0.04 a 0.06. La carga se aplica sin
brusquedades y se incrementa continuamente, en la velocidad seleccionada 1 %, hasta que no soporte
una carga mayor.
134
La velocidad de carga requerida en la máquina de ensayo se calcula mediante la formula:
R=
πs
2 Ld
(5.5.2.1)
donde:
R = Velocidad de incremento de carga, en newtons por segundo;
L = Longitud de la probeta en milímetros
d = Dimensión de la sección transversal de la probeta en milímetros;
s = Incremento de tensión, en megapascales por segundo (newtons por milímetro cuadrado por
segundo).
Figura 5.5.2.2.- Dispositivos de ensayo para probetas cilíndricas y prismáticas.
La resistencia a la tracción indirecta viene dada por la formula:
σ ct =
2F
π Ld
(5.5.2.2)
donde:
σct = Resistencia a tracción indirecta, en megapasacales o newtons por milímetro cuadrado.
F = Carga máxima, en newtons;
L = Longitud de la línea de contacto de la probeta, en milímetros;
d = Dimensión de la sección transversal, en milímetros .
135
5.5.3.- Resistencia a la flexión en tres puntos o cuatro puntos.
El comportamiento tensión – deformación de los materiales frágiles usualmente no se describe
mediante el ensayo de tracción por dos razones. En primer lugar, es difícil preparar y ensayar probetas
de tracción con la geometría requerida y en segundo lugar, existe una diferencia significativa entre los
resultados obtenidos a partir de ensayos conducidos bajo cargas de tracción y de compresión. Por
consiguiente, frecuentemente se emplea un ensayo de flexión, en el cual una probeta en forma de barra
con sección rectangular o circular es flexionada usando una técnica de tres o cuatro puntos de
aplicación de la carga. El esquema de aplicación de carga por tres y cuatro puntos se ilustra en la
figura 4.5.3.1.
Figura 5.5.3.1.- Resistencia a la flexión en tres y cuatro puntos.
Los materiales refractarios raras veces se rompen por esfuerzos puros de compresión y si por una
combinación de esfuerzos de compresión y de tracción. En el ensayo de flexión la superficie superior
esta sometida a un estado de compresión, mientras la superficie inferior esta sometida a tracción
(Figura 5.5.3.2).
Figura 5.5.3.2.- Deformación de la probeta durante el ensayo de flexión.
136
Las suposiciones básicas de la teoría clásica de las vigas son las siguientes:
1.-Los planos perpendiculares al eje longitudinal permanecen perpendiculares, y planos cuando la viga
se somete a flexión. Así, los planos AC y BD en la figura 5.5.3.3.b pueden rotar, uno con respecto al
otro, pero permanecen perpendiculares al eje longitudinal curvo. Como las deformaciones unitarias
están relacionadas directamente con las deformaciones totales, esta suposición implica que la
deformación unitaria longitudinal Ex varía linealmente con la profundidad de la viga desde un extremo
negativo o valor mínimo en CD hasta un valor positivo máximo en AB, como se indica en la figura
5.5.3.3.c.
Las fibras EF, para las cuales la deformación unitaria es cero, están situadas en la llamada superficie
neutra de la viga. La intersección de esta superficie neutra con un plano vertical de flexión se llama el
eje neutro. Esta suposición también implica que los únicos esfuerzos producidos por los momentos de
flexión M z que actúan en el plano x -y son los esfuerzos normales, σx . Debido al efecto de Poisson, las
deformaciones unitarias en las direcciones y y z son :
−
υσ x
E
Debido a este mismo efecto, la superficie neutra se curva en dos direcciones, pero se supone curva
únicamente en el plano x –y y plana en la dirección z.
2.- El material de la viga se comporta linealmente, es decir que los esfuerzos son directamente
proporcionales a las deformaciones unitarias, de acuerdo con la ley de Hooke, esto significa que los
esfuerzos normales Ox varían linealmente con la profundidad de la viga, como se indica en la figura
5.5.3.3.d.
Figura 5.5.3.3.- Flexión pura de vigas.
137
Las suposiciones básicas para flexión pura no son estrictamente aplicables a los casos en que se
presenta corte simultáneamente con la flexión. No obstante, para los elementos clasificados como
vigas, las deformaciones por corte generalmente son despreciables comparadas con las producidas por
flexión.
Unicamente en casos excepcionales tales como las vigas cortas de gran profundidad sometidas a altas
cargas de corte, la deformación por corte desempeña un papel significativo. Sin embargo, para la gran
mayoría de vigas, las deformaciones por corte (no los esfuerzos cortantes) son despreciables. Esto
también es cierto para las vigas sometidas a carga axial, con tal que esta última carga no sea
predominante.
Fórmula de la flexión elastica.
Con base en las suposiciones anteriores, una variación lineal de los esfuerzos normales, σx , se puede
expresar en la forma:
y
c
σ x = σ ext
(5.5.3.1)
en donde y es la distancia hasta el eje neutro y c es la distancia a la fibra extrema (figura 5.5.3.2.b).
Si se aplica un momento positivo M z, las condiciones de equilibrio exigen que en cualquier sección
transversal la suma de las fuerzas en la dirección x debe ser igual a cero. Entonces, de acuerdo con la
relación entre las componentes del esfuerzo y las acciones internas, se tiene:
P=
∫σ
A
x
dA = 0
y para valores diferentes a cero de σ extr
σ ext
o bien:
c
∫
A
ydA = 0
(5.5.3.2)
y c,
∫
A
ydA = 0
(5.5.3.3)
Esto implica que el eje neutro coincide con el eje centroidal del elemento.
Además del equilibrio de fuerzas horizontales se debe satisfacer el equilibrio de momentos, esto exige
que:
dM z =σx ydA e integrado a toda la sección:
Mz =
∫
A
yσ x dA
(5.5.3.4)
y sustituyendo σx el valor de dado por (5.5.3.1):
Mz =
Por definición, el término
∫
A
y 2 dA
∫
A
( c ) dA = σc
yσ ext y
ext
∫
A
y 2 dA
(5.5.3.5)
es el momento de inercia del área de la sección transversal con
respecto al eje z y se designa mediante Iz o, sencillamente, I. I tiene la dimensión de longitud a la
cuarta potencia (ésta es, metros4 o pulgadas 4 ).
138
Remplazando M z por M se obtiene:
M=
σ ext I
o bien:
c
σ ext =
Mc
I
σ ext =
M
W
(5.5.3.6)
y llamando W = Momento resistente = (I/c) se tiene:
(5.5.3.7)
Para el ensayo de tres puntos se tiene:
a).- 0 ≤ x ≤
b).-
L
2
L
<x<L
2
M=
P
x
2
M=
P
L PL Px
x - Px − =
−
2
2
2
2
y para x =
L
PL
resulta : M max =
2
4
y para x =
L
PL
resulta : M max =
2
4
y para el ensayo de cuatro puntos se tiene:
a).- 0 ≤ x ≤
L
4
M=
P
x
2
y para x =
L
PL
resulta: M max =
4
8
b).-
L
3L
<x<
4
4
M=
P
P
x 2
2
L PL
x− =
8
4
c).-
3L
<x<L
4
M=
P
P
x 2
2
P
PL
3L P
L
x− x− = − x +
2
2
4 2
4
y para x =
3L
4
resulta : M max =
PL
8
139
Para una probeta de sección rectangular y ensayo en tres puntos se tiene:
y para probeta de sección circular y ensayo en tres puntos se tiene:
La tensión máxima, o tensión a la fractura en este ensayo de flexión, se denomina modulo de rotura, o
resistencia a la flexión, un parámetro mecánico importante para los materiales frágiles. La tensión se
calcula a partir del espesor de la probeta, el momento de flexión y el momento de inercia de la sección.
El valor del módulo de elasticidad se calcula por la formula:
E=
PL3
48If
(5.5.3.8)
donde:
P = Carga del límite de proporcionalidad.
f = Flecha
L = Distancia entre centros de apoyo
I = Momento de inercia.
Análogamente, para una probeta de sección rectangular y ensayo en cuatro puntos se tiene:
σ 4P =
3PL
4bh 2
(5.5.3.9)
σ 4P =
32 PL
π R3
(5.5.3.10)
y si es de sección circular:
En la figura 5.5.3.4 se da un resumen del ensayo de flexión en tres puntos
rectangulares y circulares.
para secciones
140
Figura 5.5.3.4.Esquema del sistema de flexión por tres y cuatro puntos para medir el
comportamiento esfuerzo - deformación y modulo de rotura de materiales frágiles,
incluyendo las expresiones para el calculo de la tensión en probetas de secciones
rectangular y circular.
Los valores característicos del modulo de rotura para varios materiales refractarios y cerámicos y
están tabulados en las tabla 5.5.3.1 y 5.5.3.2, respectivamente. Puesto que durante la flexión una
probeta esta sometida tanto a esfuerzos de tracción como de compresión, la magnitud de su modulo de
rotura es mayor que la resistencia a la tracción. Además, σ, dependerá del tamaño de la probeta, de tal
modo que al aumentar el volumen de la probeta (bajo carga) aumenta la severidad de los defectos y,
por consiguiente, el modulo de rotura disminuye.
141
Tabla 5.5.3.1.- Módulos de rotura y módulos de elasticidad para materiales refractarios.
Tabla 5.5.3.2.- Módulos de rotura (Resistencia a la flexión) y módulos de elasticidad para materiales
cerámicos.
El módulo de ruptura calculado en el ensayo en tres puntos se relaciona con la resistencia a tracción
que tiene el material refractario, pero determinada en una zona muy limitada, ya que el momento
máximo se produce en el centro de la probeta.
Para tener en cuenta la heterogeneidad que presenta un material refractario, que debe reflejarse en el
comportamiento de la probeta, con el ensayo de resistencia a flexión en cuatro puntos , en el que se
somete la probeta de longitud L, a una carga P que se aplica sobre la probeta en dos puntos separados
L/2, se consigue tener una zona de probeta de longitud L/2 sometida al mismo momento flector,
rompiéndose la probeta por la sección más débil de esta parte central.
En la tabla 5.5.3.2 se dan las características de los principales tipos de materiales refractarios, entre
las que figura la resistencia a la compresión en frio. Se puede observar que la resistencia más alta se
encuentra en los refractarios de carburo de silicio y de magnesia, 100 y 80 Mpa respectivamente.
142
143
Debido a su estructura heterogénea de cerámica basta, los ladrillos refractarios tienen sólo un margen
pequeño de comportamiento totalmente elástico (Figura 5.5.3.5, curva OBR), es decir pierden su
comportamiento elástico al aumentar la carga. La razón de ese comportamiento se debe a la estructura
heterogénea de los materiales refractarios, los cuales están formados por granos de muy diferentes
tamaños y poros.
Cuando se aplica una carga a un material refractario nos encontramos con que no todo el sistema se
comporta de igual manera, los granos mayores son difícilmente deformables, mientras que los finos,
que forman la matriz, se deforman más fácilmente. Estas deformaciones van dando lugar, en la
mayoría de los casos, a microfisuras, que no llegan a romper la probeta más que a cargas elevadas.
Debido a este comportamiento no elástico del material más que a bajas cargas, el módulo de
elasticidad nos viene dado por la pendiente de la curva en el punto O, como se puede ver en la figura
5.5.3.5. La relación entre tensión y deformación en este estado inicial completamente elástico y en
donde la deformación es aún reversible es el módulo elasticidad E, que se mide en la mayoría de los
casos dinámicamente por ultrasonido o frecuencia de resonancia.
Con el aumento de la deformación hasta la rotura se llega fuera del margen puramente elástico, las
deformaciones se concentran en la parte fina del ladrillo, que es la que más cede por lo que la tensión
relativa a la deformación asciende ahora más lentamente. En tal caso no basta solamente con conocer
el módulo E para hallar el cálculo de las tensiones surgidas. Es éste el motivo por el que se ha
introducido la relación entre el esfuerzo y la deformación de rotura como módulo de deformación V:
V=
σR
εR
(5.5.3.11)
En los materiales refractarios este módulo es inferior o a lo sumo igual al módulo E. Cuando se desee
conocer qué deformación se produce en un material refractario bajo carga se utilizará el módulo de
deformación.
Este parámetro nos sirve para diseñar un material que va a estar sujeto a tensiones, como puede ser en
un horno rotativo de cemento, para que pueda soportarlas deformándose sin llegar a fisurar.
Figura 5.5.3.5.- Módulo de elasticidad y módulo de deformación.
144
La determinación del módulo de deformación en frío se realiza al mismo tiempo que se determina la
resistencia a la flexión. Para el cálculo del módulo de deformación se utiliza el mismo aparato que
para el módulo de elasticidad y la misma ecuación, sólo que en este caso se aplica la tensión de rotura
y la deformación de rotura.
σR
FR L3
σ R L2
V=
=
=
ε R 4bh 3fR 6hfR
(5.5.3.12)
Observando la ecuación (5.5.3.12) se ve que el módulo V nos indica, que para un mismo módulo de
rotura, cuando menor sea el módulo de deformación, mayor será la capacidad de deformarse un material bajo tensiones, es decir, una menor tendencia a producirse en él fisuras y desconches.
Se puede observar en la práctica, que materiales con elevadas características mecánicas presentan
elevados valores del módulo de elasticidad. El hacer esta afirmación es muy peligroso, ya que esto
puede cumplirse solo en productos del mismo tipo. Cuando hablamos de materiales diferentes, esta
afirmación es errónea.
Tanto el módulo de elasticidad, como el módulo de deformación no son parámetros inherentes a un
producto, sino que actuando sobre su microestructura, distribución de granos, porosidad, etc., podemos
variarlo en el sentido que nos interese, según la aplicación que vayamos a dar al material refractario.
Como se ha podido ver por definición, no debe existir una relación clara entre módulo de deformación
y módulo de elasticidad, salvo que el módulo de deformacióni de un material nunca puede ser mayor
que el de elasticidad.
En un trabajo presentado por el Sr. Kienow y el Sr. Hennicke relacionaron el módulo de elasticidad
(E) y el de deformación (V), esperando que esta relación indicase el grado que un material se aleja de
un comportamiento puramente elástico. Determinaron el módulo de elasticidad mediante la frecuencia
de resonancia y el de deformación, por medida de la deformación en rotura mediante el ensayo de 3
puntos, en una serie de materiales refractarios. Observaron :
1.- Que los refractarios de magnesia pura presentaban una relación
valores del módulo de deformación,V, más elevados.
(E/V) más baja, entre 2 y 3, y
2.- Los refractarios de Magnesia-Cromo con un contenido menor del 10% de Cr2 O3 presentaban una
relación superior, entre 4 y 15, y los de Magnesia-Cromo con un contenido mayor del 10% de Cr2 O3
entre 3 y 4, siendo los módulos de deformación de estos últimos del mismo orden.
3.- Los refractarios de Magnesia-Cromo con un contenido menor del 10% de Cr2 O3 son los que se
utilizan fundamentalmente en hornos rotativos de cemento, los cuales en servicio tienen que soportar
unas elevadas tensiones, las cuales tienen que poder soportar sin romper, y por lo tanto son diseñados
teniendo en cuenta esta exigencia.
Resumiendo diremos que los materiales refractarios tienen un comportamiento elástico sólo en zonas
de baja carga de aplicación por lo que cuando deseamos conocer el comportamiento real de un material
refractario bajo presión, el módulo de deformación nos da mayor información.
Es importante de todas formas indicar, que esta información es parcial, ya que no hay que olvidar, que
el ensayo se realiza a temperatura ambiente.
Para los ladrillos refractarios se intenta lograr normalmente una gran ductilidad, o sea un amplio
margen de deformación sin ruptura, lo que supone un valor elevado para la relación entre la resistencia
a la flexión y el módulo de deformación.
145
5.5.4.- Resistencia al desgaste.
Los ladrillos refractarios no se someten a esfuerzos mecánicos solo con la pura presión de carga, sino
también con el ataque abrasivo producido por el material del horno que se desliza lentamente en la
mampostería de altos hornos, hornos de cuba, cámaras de coque, hornos rotativos, cámaras de
combustión y similares y por el efecto de choque de los gases que en su paso rápido llevan finas
partículas sólidas.
Por lo tanto, no basta la resistencia a la compresión en frío para caracterizar el desgaste de los
ladrillos. A modo de criterios generales diremos que un material refractario tendrá más resistencia al
desgaste por abrasión si se verifica:
1.- Que la cohesión entre el componente disperso y la matriz sea lo más elevado posible lo que implica
la obtención de materiales de elevada densidad.
2.- Que el tamaño del constituyente disperso sea fino y de morfología granular.
3.- Que la temperatura de cocción, para un determinado componente matriz, sea lo más elevado
posible.
4.- Que la resistencia a la compresión en frío sea elevada.
La solicitación abrasiva se imita bien por la máquina rectificadora de Böhme, sin embargo los
resultados no se pueden extrapolar bien a las elevadas temperaturas de servicio de los hornos, sobre
todo cuando la superficie del ladrillo se modifica en su resistencia por influencias químicas.
Para medir la resistencia a la abrasión no existe todavía ningún método reconocido, por lo que seguirá
utilizándose como punto de referencia el coeficiente de abrasión según Bóhme. Para analizar el efecto
de choque de los gases cargados con partículas sólidas se utiliza el control por chorro de arena, para
cuya valoración existen las mismas limitaciones que para el coeficiente de abrasión. En la tabla 5.5.4.1
se han indicado algunos valores para la resistencia a la abrasión por máquina rectificadora y por chorro
de arena.
Tabla 5.5.4.1.- Resistencia a la abrasión por máquina rectificadora y por chorro de arena.
146
Un ensayo frecuente para cuantificar la resistencia al desgaste consiste en hacer incidir sobre una
probeta refractaria durante un tiempo determinado una corriente de finas partículas abrasivas
(corindón) a través de flujo de aire de alta velocidad (Figura 5.5.4.1). Se determina la pérdida de peso
que experimenta la probeta refractaria.
Figura 5.5.4.1.- Equipo para realizar ensayos de abrasión.
Otro ensayo sería medir el desgaste lineal producido sobre tres caras de dos probetas cúbicas del
material refractarios.
Para la ejecución del ensayo descrito en esta norma, será necesaria una máquina de tipo especial, apta
para este ensayo y que reunirá las características siguientes (Figura 5.5.4.2):
(a).- Dispondrá de una pista de rozamiento de radio mínimo interior de 25 cm y de radio mínimo
exterior de 40 cm capaz de girar a una velocidad mínima relativa de 1 m/s, referido al centro de
la probeta.
(b).- Constará de dos portaprobetas, solidarios a sendos ejes deslizantes y diametralmente
opuestos sobre el bastidor, que estarán centrados sobre la circunferencia media de la pista de
rozamiento.
(c).- Poseerá un dispositivo mediante el cual se pueda comprimir la probeta entre los platos con una
presión de 0.0588 MPa.
(d).- Tendrá otros dispositivos que permitan verter abrasivo y agua en las superficies de rozamiento.
(e).- Dispondrá así mismo de un contador de vueltas.
El ensayo se efectuará sobre un mínimo de dos probetas cúbicas de 7 cm de arista, con una tolerancia
del ±5%.
En cada probeta se determinará el volumen inicial por el método de la balanza hidrostática (UNE 22182). Posteriormente se determina la superficie a desgastar midiendo con un calibre las dos
147
dimensiones de la cara, de forma que cada dimensión viene dada por la media de los valores en los
extremos y en el centro de las aristas de la cara. Seguidamente se colocan las probetas en los portas y
se cargan a razón de 0.0588 MPa respecto a la superficie de la cara a desgastar.
Finalmente se pone la máquina en marcha y se va vertiendo, de manera uniforme, el abrasivo
(carborundum cuyos granos estén comprendidos entre un tamiz 0,33 UNE 7-050 y otro tamiz 0,63
2
UNE 7-050), en una cantidad de 1 g/cm de la superficie de la mayor cara de las sometidas al desgaste,
así como 12 gotas de agua por minuto. Se someten las probetas a un recorrido de 1 000 m, sacándolas
posteriormente de la máquina y limpiándolas cuidadosamente.
El resultado será el siguiente:
Desgaste lineal (mm) = D =
Vi − V f
A
(5.5.4.1)
siendo:
Vi = Volumen inicial (mm 3 )
Vf = Volumen final (mm 3 )
A = Superficie de las caras de las probetas en contacto (mm 2 )
Se tomará como resultado definitivo la media aritmética de los desgastes lineales de cada una de las
dos.
Figura 5.5.4.2.- Equipo de medida para la determinación de la abrasión superficial.
148
Otro metodo para determinar el valor de la resistencia a la abrasión se basa en la huella producida en
la cara vista del material al ser sometida al rozamiento de un disco de acero y material abrasivo a una
velocidad de 75 r.p.m. durante un minuto (Figura 5.5.4.3)
Figura 5.5.4.3.- Esquema de ensayo de desgaste por abrasión.
La máquina de desgaste se compone de los elementos que figuran en el esquema indicado en la figura
5.5.4.4.
El disco es de acero, de dureza comprendida entre 203 HB y 245 HB, de diámetro 200 mm, y de
anchura 70 mm y un carro portaprobetas con un contrapeso que mantienen la presión. Como material
abrasivo se emplea corindón blanco de tamaño de grano 80.
Figura 5.5.4.4.- Esquema de la máquina del ensayo de desgaste por abrasión
149
La muestra estará compuesta por piezas cortadas de 100x70 mm2 . La probeta estará limpia y seca y la
superficie de su cara vista será plana, por lo que, si la textura de la probeta es rugosa ésta se
planificará hasta conseguir una superficie lisa.
Se llena la tolva con abrasivo seco. Se sitúa la probeta sobre el carro, de forma que la huella que se
produzca se encuentre a más de 15 mm de cualquier borde de la probeta.
Una vez situada la probeta en contacto con el disco, se abre la válvula de control y se inicia el ensayo
hasta completar 75 vueltas. Siempre que sea posible se aconseja realizar dos huellas sobre cada
probeta y se tomará como resultado del ensayo la medida mayor obtenida.
El resultado del ensayo es el siguiente:
- Desgaste de cada probeta (hi en mm)
- El desgaste medio:
∑i hi
h=
4
150
6.- Propiedades mecánico-térmicas.
6.1.- Introducción.
Las propiedades mecánico-térmicas son aquellas en que se hace intervenir la temperatura, al mismo
tiempo que la carga
6.2.- Resistencia a la flexión en caliente.
Uno de los parámetros más usados para caracterizar el comportamiento mecánico de los refractarios es
el la resistencia a la flexión a temperaturas elevadas o módulo de rotura en caliente (MDRC) y con un
incremento constante del esfuerzo. La determinación de esta propiedad exige el ensayo de un cierto
número de muestras en idénticas condiciones debido a su variabilidad. Dado que, en general, los
refractarios presentan fractura no lineal a elevadas temperaturas los valores del MDRC dependen del
tamaño de la muestra, de la velocidad de carga y del sistema de carga utilizado.
Por otra parte, cada vez aparecen más refractarios de carácter no oxídico, para los que una atmósfera
convencional de aire no es inerte, por lo que el ensayo del MDRC debe hacerse en atmósfera
controlada.
La resistencia a la flexión (módulo de rotura) es el esfuerzo máximo que puede soportar una probeta
prismática de dimensiones especificadas cuando se flexiona en un dispositivo de carga de tres puntos.
La temperatura de ensayo es la temperatura en el centro geométrico de la cara de la probeta sometida a
tracción.
El dispositivo de aplicación de la carga (Figura 6.2.1) debe contar con dos cojinetes para soportar las
probetas y uno para aplicar la carga. Los tres cojinetes deben ser paralelos entre si. Para probetas
normales, la distancia entre los cojinetes soporte debe ser de 125 mm ± 2 mm, con posibilidad de
adaptación para probetas de otras longitudes). El cojinete para aplicar la carga debe colocarse centrado
entre los dos cojinetes soporte, con una exactitud de ± 2 mm
1.- Cojinete (para aplicar la carga (con un radio de 5 mm ± 1 mm)
2.- Cara sometida a compresión
3.- Cara sometida a tracción
4.- Cojinetes soporte (con un radio de 5 mm± 1 mm)
Ls = Distancia entre los soportes, en milímetros
h = Altura de la probeta, en milímetros
Figura 6.2.1.- Disposición y dimensiones de la probeta y de los cojinetes soporte y de aplicación de la
carga
151
Los cojinetes serán de material refractario de elevada dureza para resistir al desgate, y al mismo
tiempo, de volumen estable a temperaturas altas y no deben reaccionar por contacto con la probeta a la
temperatura de ensayo. Su longitud será, al menos, 5 mm superior a la anchura de las probetas y un
radio de curvatura de 5 mm ± 1 mm. Puesto que los cojinetes pueden aplanarse con el uso deben
examinarse periódicamente para garantizar que sus radios permanezcan dentro de dichos límites
A menos que se acuerde otra cosa, la probetas deben ser prismáticas con una sección transversal de 25
± 1mm x 25 mm ± 1 mm y una longitud de unos 150 mm. Las caras longitudinales de cada probeta
deben ser paralelas entre si con una tolerancia de ± 0.5 mm y los lados de una sección transversal de
la probeta deben ser paralelos entre si con una tolerancia de ± 0.2 mm. Se debe garantizar que las
probetas presenten superficies lisas y aristas limpias. Si se van a utilizar probetas de otros tamaños, las
dimensiones deben alterarse gradualmente de 5 mm en 5 mm, con una longitud mínima de 100 mm y
una anchura y altura mínimas de 10 mm.
La fórmula para calcular la resistencia a la flexión es:
σf =
M MAX
W
=
3FMAX LS
2bh 2
(6.2.1)
Y es únicamente valida para probetas que presentan forma alargada. Se recomienda que la relación
entre la altura (h) y anchura (b) de la probeta la relación entre la altura de la probeta (h) y la distancia
entre los soportes (LS) sea la siguiente:
h 1
>
b 3
y
h 1
<
LS 4
La anchura y la altura de la probeta a temperatura ambiente deben medirse en su centro geométrico
con una exactitud de 0.1 mm.
Si se conoce la dirección de prensado del ladrillo, cada probeta debe cortarse de forma qua la cara
longitudinal superior de la probeta en la posición de ensayo (la cara sometida a compresión) coincida o
sea paralela a una de las caras originales del ladrillo y sea perpendicular a la dirección de prensado.
Ninguna otra cara longitudinal de la probeta debe tener la piel original del ladrillo.
El horno debe ser de uno de los siguientes tipos:
(a).- Tipo discontinuo, en el que cierto número de probetas se calientan juntas hasta la temperatura de
ensayo y se someten a ensayo una tras otra.
(b).- Tipo secuencial, en el que las probetas se calientan hasta la temperatura de ensayo una tras otra a
medida que pasan a través del aparato.
En los dos casos el horno debe ser capaz de proporcionar el control de la temperatura y el
calentamiento del dispositivo de aplicación de la carga y de las probetas.
La temperatura de ensayo debe ser acordada entre las partes interesadas. Se recomienda utilizar
múltiplos de 100 °C (por ejemplo l000 ºC. 1100 °C), aunque si fuera necesario, pueden utilizarse
también múltiplos de 50 ºC.
Se calientan las probetas hasta la temperatura de ensayo ± 10 ºC a una velocidad media de
calentamiento comprendida entre 2 °C/min y 10 °C/min, siendo preferible entre 4 °C/min y 6 °C/min.
Cuando se alcanza la temperatura de ensayo la probeta se mantiene a esta temperatura el tiempo
suficiente para que la distribución de dicha temperatura en su interior sea uniforme en ± 10 ºC.
152
Normalmente son suficientes de 15 minutos a 30 minutos para probetas normales o ladrillos cocidos.
Para ladrillos no cocidos es conveniente que las partes interesadas establezcan por acuerdo la
temperatura y un tratamiento previo, o un tiempo para la difusión de la temperatura.
La temperatura medida por el termopar situado cerca del centro de la cara de la probeta sometida a
tracción no debe variar en más de ± 2 ºC durante el ensayo
Se coloca la probeta sobre los cojinetes inferiores, de tal forma que descanse simétricamente sobre
ellos. Si una cara longitudinal de la probeta coincide con una cara original del ladrillo, esta debe ser la
cara sometida a compresión.
La velocidad de incremento de la carga debe seleccionarse de tal forma que el tiempo necesario para la
rotura, desde que comienza a aplicarse la carga, no sea inferior a 10 s. Si una probeta se rompe en
menos de l0 s debe repetirse el ensayo, a menos que la rotura se haya producido a una velocidad de
incremento de 0.02 MPa/s. El nuevo ensayo debe llevarse a cabo a una velocidad menor.
Se aplica la carga verticalmente sobre la probeta a velocidad constante hasta que rompe. La velocidad
de incremento de la carga debe ser:
1.- Para un producto denso de resistencia normal: 0.15 MPa/s ± 10 %.
2.- Para un producto denso de baja resistencia o un producto refractario aislante de resistencia normal:
0.05 MPa/s ±10%.
3.- Para un producto aislante de baja resistencia 0.02 MPa/s ± l0%.
El módulo de rotura, σ f , es la relación entre el momento de flexión en el punto de rotura, M MAX y el
momento de resistencia W (módulo de sección) y se calcula a partir de la siguiente ecuación, derivada
de la ley de Hooke para los materiales elásticos:
3F L
M
σ f = MAX = MAX2 S
(6.2.2)
W
2bh
donde:
FMAX = Fuerza máxima ejercida sobre la probeta, en Newtons.
LS = Distancia entre los puntos soporte de la probeta, en milímetros.
b = Anchura de la probeta, en milímetros.
h = Altura de la probeta, en milímetros.
El resultado debe expresarse en megapascales (MPa).
En el control de resistencia a la flexión en caliente con distintos tipos de ladrillos se establecieron los
valores de la tabla 6.2.1(en N/mm 2 ).
Tabla 6.2.1.- Resistencia a la flexión en caliente de distintos tipos de ladrillos refractarios.
153
6.3.- Refractariedad bajo carga.
El ensayo de refractariedad bajo carga surgió como una modificación del ensayo de variación
dimensional permanente, de tal forma que no solo se tuviera en cuenta el efecto de la temperatura, sino
también el del esfuerzo mecánico.
Por refractariedad bajo carga se entiende la temperatura a la cual una probeta de material refractario,
denso o aislante, sometida a una carga constante y a un determinado régimen de calentamiento,
experimenta un cierto tanto por ciento de contracción, con respecto al punto de máxima dilatación
(Punto de culminación de la curva % Dilatación/Contracción en función de la temperatura). Por tanto,
esta propiedad nos informa sobre el punto o la zona de reblandecimiento de un material sometido a
temperatura ascendente bajo una carga de presión constante.
El comportamiento de reblandecimiento bajo carga no es idéntico a la zona de fusión de las materias
primas puras, ya que influye el contenido y grado de distribución de los fundentes de baja fusión.
Al elevar paulatinamente la temperatura de la probeta se produce a pesar de la aplicación de la carga la
dilatación de la probeta, que alcanza un máximo para una determinada temperatura, la cual es función
del tipo de refractario ensayado. En la figura 6.3.1 puede verse una curva tipo, que da la deformación
de la probeta ( % Dilatación/Contracción) en función de la temperatura.
Para la interpretación de la curva anterior, se trazará la tangente en el punto de máxima dilatación y se
mediran las variaciones de la altura a partir de dicha tangente. Igualmente, se indicarán las
temperaturas respectivas a las que la probeta ha sufrido una contracción de:
0.6 %
1.0 %
5.0 %
10.0 %
20.0 %
(0.30 mm): Temperatura T0.6
(0.50 mm): Temperatura T1
(2.50 mm): Temperatura T5
(5.00 mm): Temperatura T10
(10.00 mm): Temperatura T20
La temperatura Ta = (temperatura inicial) resulta del punto de intersección de la curva con la
horizontal, situada 3 mm, más abajo del punto de culminación de la curva. Esto supone
aproximadamente un 0.6 % de aplastamiento de la probeta.
La temperatura final Te10 , se alcanza siempre cuando la curva desciende 100 mm por debajo del punto
de culminación. En caso de que se produzca la rotura de la probeta de forma brusca durante el ensayo,
se indicara la temperatura final como TR (temperatura de rotura), anotando también el tanto por ciento
de contracción correspondiente (x %).
Rotura para una contracción de x %: Temperatrura TRx. Esto ocurre en algunos tipos de refractarios,
especialmente en los básicos y de sílice.
154
Figura 6.3.1.- Ensayo de refractariedad bajo carga. Deformación en función de la temperatura a
velocidad de calentamiento constante.
Para la determinación de la refractariedad bajo carga existes dos métodos:
1.- Método convencional.
2.- Método diferencial
Método convencional.
Para determinar la refractariedad bajo por el método convencional, se utilizan probetas cilíndricas de
50 mm de altura y 50 mm de diámetro. Estas se calientan a alta temperatura, con velocidad constante
de calentamiento y una carga de 0.2 N/mm 2 . La variación de la altura del cilindro en función de la
temperatura se registra con un aumento 10 veces superior. En esta modificación de altura se incluyen
tanto la dilatación térmica bajo carga como la dilatación de los aparatos de control.
En la figura 6.3.2 puede verse la disposición de la probeta y dispositivo para la transmisión de la
carga.
El aparato de ensayo estará constituido por un horno, un dispositivo que permita situar la probeta bajo
una carga axial, otro para medir las variaciones de altura de la probeta y un sistema que permita
determinar la temperatura de la probeta y la velocidad de calentamiento, bien por medio de termopares
o bien por medio de un pirómetro óptico.
155
Figura 6.3.2.- Disposición de la probeta y dispositivo para la transmisión de la carga.
El horno eléctrico utilizado será de calentamiento eléctrico o por gas y estará constituido por una
mufla vertical cilíndrica, construida con cualquier material altamente refractario. El diámetro interior
estará comprendido entre 90 y 120 mm, poseyendo una zona central de máximo calentamiento en una
longitud de 100 a 150 mm, en la cual es fundamental una uniformidad de temperatura dentro de un
margen de ±10 ºC.
El horno, al mismo tiempo, permitirá elevar la temperatura de la probeta hasta la del ensayo, en una
atmosfera de aire o bien en otra atmosfera definida con precisión, según el programa de calentamiento
especificado.
156
El régimen de elevación de la temperatura será el siguiente (Figura 6.3.3):
1.- Hasta 900 ºC la velocidad de calentamiento será de 10 ºC/minuto.
2.- A partir de 900 ºC y hasta el final del ensayo a 4 ºC/minuto. Se comprobará dicha velocidad
mediante lecturas realizadas cada 5 minutos y tolerándose una desviación entre la curva de
calentamiento y la teórica de ± 5 ºC. Cuando de se este próximo al punto final del ensayo, la
temperatura deberá controlarse cada 2 minutos y medio.
Para aquellos productos en los que la refractariedad bajo carga sea superior a 1500 ºC se podrá elevar
la temperatura a un régimen de 10 ºC/minuto hasta los 1200 ºC.
El ensayo puede llevarse a cabo hasta una temperatura máxima de 1700 ºC.
Figura 6.3.3.- Régimen de elevación de la temperatura.
En la figura 6.3.4 se dan las curvas para diversos materiales refractarios, entre las que pueden
distinguirse dos tipos de comportamiento extremos:
1.- Amplio intervalo de reblandecimiento (ladrillos de chamota).
2.- Ausencia de intervalo de reblandecimiento (ladrillos de sílice).
El control del ensayo se realiza teniendo en cuenta las condiciones del horno a atmósfera reductora.
Figura 5.3.4.- Curvas de refractariedad bajo carga (método convencional) para ladrillos refractarios:
1 chamota, 2 silimanita, 3 cromo-magnesia, 4 sílice (bóvedas), 5 sílice (hornos de cok), 6
magnesia-cromo.
157
En la tabla 6.3.1 se indican los puntos Ta de los ladrillos refractarios cocidos más utilizados.
Tabla 6.3.1.- Valores de la refractariedad bajo carga (Ta )de los ladrillos refractarios más utilizados.
Método diferencial.
Con el fin de evitar posibles errores debido a la propia dilatación del aparato de medida se desarrolló
el método diferencial para determinar la refractariedad bajo carga. Se utiliza las mismas probetas que
para el método convencional, pero además lleva un taladro interior de 12 a 13 mm, de manera que se
puedan aplicar palpadores en la parte superior e inferior.
El eje de la probeta debería,
preferentemente, estar orientado en la dirección en la que el producto ha sido prensado.
Por este método se obtienen valores de la refractariedad bajo carga inferiores a los obtenidos por el
método convencional.
El dispositivo de carga debe ser capaz de aplicar una carga centrada sobre el eje común de la columna
de carga, la probeta y la columna soporte, y de dirigirla verticalmente a lo largo de este eje durante
todas las etapas del ensayo. El dispositivo de carga consta de los elementos siguientes (Figura 6.3.5):
1.- Columna fija, de diámetro exterior no inferior a 45 mm y provista de un orificio axial
2.- Columna móvil, de diámetro exterior no inferior a 45 mm.
3.- Dos discos, de 5 mm a 10 mm de espesor, y de un diámetro no inferior a 50.5 mm y no inferior al
diámetro real de las probetas, fabricados con un material refractario apropiado que sea compatible con
el material sometido a ensayo.
Por ejemplo, para los productos de sílice-alúmina, la mullita cocida a alta temperatura o la alúmina, y
para los productos básicos, la magnesia o espinela.
Estos discos se colocan entre la probeta y las columnas móvil y fija. El disco situado entre la probeta y
la columna fija debe tener un orificio central. Los extremos de las columnas móvil y fija deben ser
planos y perpendiculares a sus ejes. Las caras de cada disco deben ser planas y paralelas.
158
Si existe la posibilidad que entre los discos y la probeta se produzca una reacción química, debe
colocarse entre ellos una lámina de platino o de platino-rodio de un espesor de 0.2 mm.
1.- Columna móvil
4.- Termopar de control
7.- Tubo de alúmina interior
10.- Instrumento de medida
2.- Disco
3.- Termopar central
5.- Probeta
6.- Disco
8.- Tubo de alúmina exterior
9.- Columna fija
Figura 6.3.5.- Aparato de ensayo. Instrumento de medida situado por debajo de la probeta.
159
1.- Tubo de alúmina interior
4.-Disco
7.-Probeta
2.- Tubo de alúmina exterior
3.- Columna móvil
5.-Termopar central
6.- Termopar de control
8.-Disco
9.- Columna fija
Figura 6.3.6.- Aparato de ensayo. Instrumento de medida situado por encima de la probeta.
160
La disposición de las dos columnas, los dos discos, la lámina de platino, si se utiliza, y la probeta se
muestra en la figura 6.3.7. Esta indica también los diámetros característicos de los orificios de la
columna fija y del disco intermedio.
Figura 6.3.7.- Ejemplo de disposición de la probeta, columnas, discos y tubos.
161
Las columnas y los discos deben ser capaces de soportar, sin deformación significativa, la carga
aplicada hasta la temperatura final de ensayo. No debería producirse reacción entre los discos y el
sistema de aplicación de la carga.
El diseño del horno debería ser tal que permita el fácil acceso a todo el dispositivo, bien mediante el
desplazamiento de la columna soporte o si el acceso al horno es limitado, mediante la rotación de éste
sobre sí mismo. El dispositivo debería ser tal que, antes de aplicar la carga, la probeta y la columna de
carga estén situadas vertical y coaxialmente con respecto a la columna soporte.
El dispositivo de medida, que se compone de los siguientes elementos:
1.- Tubo de alúmina exterior, situado en el interior de la columna fija, apoyado sobre la cara
inferior del disco inferior, y se desplace libremente por el interior de la columna fija.
2.- Tubo de alúmina interior, situado en el interior del tubo de alúmina exterior y que atraviese los
orificios del disco inferior y de la probeta para apoyarse en la cara inferior del disco superior, y
que se desplace libremente por el interior del tubo de alúmina exterior, del disco inferior y de la
probeta.
Los tubos de alúmina deben ser capaces de soportar, sin deformación significativa la carga impuesta
por el instrumento de medida a todas las temperaturas, hasta alcanzar la temperatura final de ensayo.
La disposición de los dos tubos, los dos discos y las probetas de ensayo se muestra en la figura 6.3.7
que indica así mismo los diámetros exteriores e interiores característicos de los tubos de alúmina
exterior e interior.
Instrumento de medida apropiado (por ejemplo, un reloj comparador o un transductor de longitud
conectado a un sistema de registro automático), fijado al extremo del tubo exterior y accionado por el
tubo interior. La sensibilidad del dispositivo de medida debe ser como mínimo de 0.005 mm.
Procedimiento operatorio.
Se mide la altura de la probeta con una aproximación de 0.1 mm, así como sus diámetros interior y
exterior.
Se monta la probeta entre la columna de carga y la columna soporte con los discos intercalados, y se
ajusta el dispositivo de medida en la posición correcta. Se coloca el conjunto en el horno.
Se aplica a la columna de carga una carga real de tal magnitud que el esfuerzo de compresión al que se
sometela probeta (incluida la debida a la masa de la columna de carga) sea, preferentemente, la
siguiente:
1.- Para productos conformados densos: 0.2 MPa
2.- Para productos aislantes conformados: 0.05 MPa:
Dichos esfuerzos serán aplicados con una exactitud del ± 2%. La carga total aplicada debe redondearse
a 1 Newton.
La temperatura del horno se eleva a una velocidad tal que el termopar de control indique una
velocidad de calentamiento comprendida entre 4.5 ºC/min y 5.5 ºC/mín.
Para productos conformados densos y hasta una temperatura de 500 ºC puede utilizarse una velocidad
de calentamiento de hasta 10 ºC/min.
162
Se registran la temperatura en el centro de la probeta y las lecturas del dispositivo de medida, a
intervalos no superiores a 5 minutos durante todo el ensayo. Cuando comienza el reblandecimiento, se
toma nota de la temperatura y de las medidas a intervalos de 15 s.
Se continúa calentando el horno a velocidad constante, hasta la temperatura límite de ensayo o hasta
que el reblandecimiento de la probeta sea superior al 5 % de su altura inicial.
A partir de los resultados obtenidos se traza la curva C 1 , (Figura 6.3.8), que representa, en porcentaje,
las variaciones en la altura de la probeta en función de la temperatura medida por el termopar sin tener
en cuenta las variaciones en la longitud de los tubos de alúmina.
Se determina, en función de la temperatura, la variación de dimensión de una longitud del tubo de
alúmina
interior igual a la altura nominal de la probeta. Se expresa el valor de estas variaciones como tanto por
ciento de la altura nominal, H. de la probeta, y con su ayuda se traza la curva de corrección C 2 como la
que muestra la figura 6.3.8.
Como alternativa para calcular la corrección anterior, hasta una temperatura de 1500 ºC, se puede
utilizar el valor de la dilatación térmica lineal indicada por el fabricante del material de alúmina
sinterizado utilizado para la fabricación del tubo interior (por ejemplo, dilatación térmica a 20 °C: 0%
y a 1000 °C : 0.82%).
Se traza la curva corregida C 3 en la que AB = a la distancia CD para cualquier temperatura dada (
figura 6.3.8). A partir del punto más alto de la curva corregida, se traza una línea recta paralela al eje
de temperatura (figura6.3.8). La deformación H de la probeta a una temperatura dada T es por
definición, la diferencia entre la ordenada de la línea recta y la ordenada del punto sobre la curva
corregida correspondiente a la temperatura T.
Se marcan sobre la curva los puntos a los que la deformación medida corresponde al 0.5 %, 1 %, 2 % y
5 % de la altura inicial de la probeta, y se anotan las temperaturas correspondientes T0.5 , T1 , T2 y T5 .
Es preferible la disposición del equipo de ensayo con el dispositivo de medida situado bajo el horno
que contiene la probeta, a aquella en la que el dispositivo está por encima por las siguientes razones:
(a).- El transductor se mantiene más fácilmente a una temperatura adecuada y razonablemente
constante.
(b).- La carga mecánica aplicada a los extremos calientes de los tubos de medida de alúmina se
mantiene en un mínimo.
Esto es particularmente importante en el caso del tubo interior. Cuando el transductor está situado bajo
el horno, la carga en el extremo caliente del tubo de alúmina interior es igual a la fuerza aplicada por
el muelle del transductor, menos la masa del tubo y la del termopar que lo atraviesa. La fuerza
aplicada por el muelle del transductor se puede ajustar de tal manera que en todas las condiciones del
ensayo, sea la adecuada para mantener el contacto con el disco.
En la figura 6.3.9 se puede ver como el alargamiento de la probeta es igual al alargamiento dado por la
curva real experimental más la variación de dimensión de una longitud del tubo de alúmina
interior igual a la altura nominal de la probeta.
163
Figura 6.3.8.- Ejemplo de medida de la deformación real a una temperatura dada.
164
Figura 6.3.8.- Relación entre el alargamiento de la probeta y el alargamiento dado por la curva real
165
6.4.- Fluencia bajo presión.
6.4.1.- Introducción.
Se entiende por termofuencia o simplemente fluencia la deformación plástica lenta y continua que, a lo largo
del tiempo, experimentan los materiales sometidos a cargas inferiores a las que producirían deformaciones
permanentes a temperatura ambiente, cuando trabajan a temperaturas suficientemente elevadas. Esta
deformación continua y no reversible puede llevar, finalmente, al fallo del material. Estos cambios de forma
son generalmente perjudiciales, siendo un factor que limita la vida de un determinado componente.
Así, por ejemplo, las piezas que soportan las hileras de colada en la industria e vidrio o los tubos para
la suspensión de piezas en hornos túnel, deben de reemplazarse antes de que las piezas toquen el suelo
del horno o se salgan de sus apoyos provocando el paro inmediato del horno.
Por temperatura suficientemente elevada, a partir de la cual se presenta la fluencia, se entiende por regla
general T > (0.3-0.4)TF para materiales met álicos y T > (0.4-0.5)TF para materiales cerámicos, siendo TF la
temperatura de fusión del material en grados kelvin.
La fluencia es un proceso dependiente del tiempo, en el cual la deformación del material es función no sólo de
la tensión aplicada
Mientras que, a temperatura ambiente, la deformación elástica o plástica inducida en un sólido por una
acción mecánica ocurre instantáneamente y su magnitud depende exclusivamente de la tensión
impuesta, a temperaturas elevadas la deformación plástica depende tanto del tiempo de aplicación de
la carga como de la temperatura.
Así, se define la fluencia como la lenta y continua deformación plástica que experimentan los
materiales a temperaturas elevadas bajo la acción de una carga constante, es decir:
ε = f (σ , T , t )
(6.4.1.1)
donde:
T = Temperatura
t = Tiempo
σ = Tensión
La variable fundamental que gobierna estos fenómenos es la temperatura.
Aunque la fluencia puede producirse a cualquier temperatura, solo a temperaturas superiores al 40 %
de la temperatura de fusión del primer componente puede ser apreciable (T≥0.4TF donde T es la
temperatura y TF es la temperatura de fusión del primer componente).
A temperaturas menores, la fluencia se caracteriza por una disminución constante de la velocidad de
deformación, mientras que a altas temperaturas, la fluencia se produce siguiendo tres regímenes
distintos produciéndose finalmente la fractura.
La temperatura de fusión de los materiales refractarios es elevada, por lo cual el fenómeno de fluencia
solo tiene importancia en aplicaciones en las que los materiales deben trabajar a temperaturas muy
altas, pero en general este es el caso de los materiales refractarios.
Desde un punto de vista práctico, el interés de la fluencia se centra en determinar los tiempos de utilización de
un componente, bajo las condiciones de tensión y temperatura que tengan lugar mientras que se encuentre en
servicio. Dado que los tiempos prolongados de ensayo son difíciles de alcanzar en el laboratorio, se utilizan
distintos procedimientos que permitan la extrapolación de los datos obtenidos, con el fin de determinar los
posibles tiempos de utilización y su aplicación a cada proyecto.
166
Normalmente, el ensayo de fluencia se realiza bajo carga constante, llevándose hasta la rotura. Además, debe
fijarse la carga y la temperatura de ensayo, medir los tiempos con sus correspondientes alargamientos, con el
fin de representar gráficamente los valores obtenidos y así poder conocer la curva de fluencia de cada material
para unas determinadas condiciones de temperatura y carga.
6.4.2.- Leyes experimentales de fluencia.
En la figura 6.4.2.1 se pueden observar las curvas típicas de fluencia en dos regímenes de temperatura.
En t = 0 nada mas aplicar la carga (el material ya está a una temperatura elevada) se produce una
deformación instantánea elástica o plástica, según la carga impuesta supere o no el límite elástico del
material a la temperatura del ensayo. Es el término ε0 , que es mayor en el caso de alta temperatura
debido a la disminución en el módulo elástico. En el caso de temperaturas elevadas variación de la
deformación plástica con el tiempo, bajo tensión y temperaturas constantes la curva presenta tres
regiones características.
TENSION Y
TEMPERATURA
CONSTANTES
Figura 6.4.2.1.- Variación de la deformación elástica con el tiempo, bajo carga y temperatura
constantes.
167
Una vez cargado, el material se deforma con una alta velocidad de deformación inicial. A medida que
pasa el tiempo la velocidad de deformación disminuye .En el caso de baja temperatura este
comportamiento continua de forma indefinida. Entonces la región I corresponde a la zona de fluencia
primaria caracterizada por una velocidad de fluencia:
•
ε=
dε
dt
(6.4.2.1)
decreciente con el tiempo.
A alta temperatura, el régimen de constante disminución de la velocidad de deformación da paso a un
•
estadio o región II donde la velocidad de deformación ε f es independiente de la deformación y del
tiempo. Cuando esto sucede, la fluencia esta en el segundo estadio, llamado estado estacionario.
Una vez que el material se ha deformado considerablemente en condiciones estacionarias,
eventualmente la velocidad de deformación comenzará a aumentar con el tiempo, de manera que el
material entra en el estado terciario de fluencia. En este tercer estadio la deformación aumenta a gran
velocidad hasta que la pieza no puede soportar la tensión aplicada, produciéndose la fractura.
La explicación de estos hechos reside en la acción conjunta de dos fenómenos: el endurecimiento
estructural a consecuencia de la deformación plástica (obstaculización del movimiento de las
dislocaciones) y el ablandamiento promovido por la alta temperatura existente (desbloqueo de las
dislocaciones como consecuencia de la agitación térmica).
En un principio (región I) la velocidad de la deformación plástica disminuye con el paso del tiempo
como resultado de un predominio del efecto endurecedor. Luego (región II) la velocidad de fluencia
constante indica un equilibrio entre ambos fenómenos: el número de dislocaciones disponibles para
moverse y producir deformación plástica se mantiene constante, es decir, el número de dislocaciones
bloqueadas por los obstáculos existentes en la red cristalina debe ser igual que el de dislocaciones
liberadas (desbloqueadas) como consecuencia de la agitación térmica.
Finalmente, la región III correspondiente a una velocidad de fluencia acelerada, se debe al fuerte daño
interno producido (estricción, porosidad). La tensión real que actúa en la región más dañada es muy
superior a la tensión impuesta como resultado de la fuerte disminución de la sección efectiva en dicha
zona. Si en el ensayo se hubiese mantenido constante esa tensión real, el tramo rectilíneo de la región
II se extendería hasta la rotura final.
Dada la magnitud relativa de las tres regiones, el parámetro más significativo evaluado en el ensayo,
•
es la velocidad de fluencia ε f en la región II, que corresponde a la mínima velocidad de deformación
en el ensayo.
•
La velocidad mínima de fluencia ε f es muy sensible a la variación de la tensión impuesta σ y a la
temperatura de ensayo. La figura 6.4.2.2 muestra el efecto de la tensión impuesta sobre la velocidad
de fluencia a temperaturas bajas y altas. La velocidad de la deformación aumenta con la tensión. La
mayoría de los estudios se realizan midiendo la influencia de la tensión sobre la velocidad de fluencia
•
estacionada ε f . Esta velocidad varía considerablemente en función de la tensión aplicada. Un efecto
similar ocurre al aumentar la temperatura.
168
(a)
(b)
Figura 6.4.2.2.- Efecto de la tensión impuesta sobre la velocidad mínima de fluencia.
(a).- Temperaturas bajas
(b).- Temperaturas altas
169
Los procesos que intervienen en la fluencia son procesos térmicamente activados. De forma general, si
•
se representa L ε en función de 1/K, se obtiene frecuentemente una linea recta en un cierto dominio
de temperatura. La velocidad de deformación se puede, por lo tanto, poner de la forma siguiente:
•
ε
•
f
=ε0 e
−∆Ha
kT
(6.4.2.2)
donde ε 0 no depende de la temperatura pero si de la tensión y de la microestructura. ∆Ha es la energía
•
de activación aparente. Para una tensión dada, en el estado estacionario, se puede considerar que ε 0 es
constante si la textura permanece constante. Hay que tener en cuenta que ésta hipótesis es justificable
en el caso de los metales y casi imposible en el caso de los materiales cerámicos y refractarios. En
efecto, ciertos mecanismos de deformación pueden modificar de manera muy significativa la
microestructura (por ejemplo, los mecanismos de cavitación).
6.4.3.- Mecanismos de fluencia.
Los mecanismos de deformación responsables de la fluencia pueden clasificarse fundamentalmente en
cuatro grupos:
Mecanismos microscópicos a nivel atómico:
1.- Difusión de defectos puntuales
2.- Movimiento de dislocaciones
Mecanismos fisico-químicos y microestructurales:
3.- Deslizamiento en borde de grano
4.- Cavitación
La fluencia en los materiales refractarios depende de un gran número de parámetros. Además la
deformación será debida en la mayoría de los casos a la superposición de varios tipos de deformación
correspondientes a fenómenos distintos:
-Deformación viscoelástica, εve, que es preponderante en el dominio de la fluencia primaria. Consiste
generalmente en un deslizamiento bloqueado por las rugosidades en borde de grano.
-Deformación por mecanismos de difusión,εdif, de uno o más elementos constituyentes del material. La
fluencia estará controlada por la especie que difunda más rápidamente. Este tipo de deformación
predomina en el estadio secundario o estado estacionario, y en este caso el exponente de la tensión
aplicada en la ley de fluencia es igual o prácticamente la unidad.
- Deformación por cavilación, εcav, debido al deslizamiento entre granos con un cambio de volumen.
Este mecanismo domina en el tercer estadio de la curva de deformación, pero también puede intervenir
durante la fluencia estacionaria. Esta es la razón por la que muchos autores se inclinan a proponer
modelos de cavitación para la deformación de las cerámicas.
La deformación total por fluencia, εt , vendrá dada, por lo tanto, por:
ε t = ε ve + ε dif + ε cav
(6.4.3.1)
170
A la ecuación (6.4.3.1) debida a Lange hay que añadirle otros dos términos debidos a dos mecanismos
suplementarios:
- Deformación intergranular por movimiento de dislocaciones, εitrag.
- Deformación debida a un mecanismo de disolución-reprecipitación, εdp bajo el efecto de la tensión.
La ecuación global de la deformación total por fluencia sera ahora:
ε t = ε ve + ε itrag + ε cav + ε dif + ε dp
(6.4.3.2)
La figura 6.4.3.1 muestra la descomposición de la deformación total en fluencia de una cerámica
según tres mecanismos fundamentales.
Figura 6.4.3.1.- Descomposición de la deformación total en fluencia de una cerámica.
Los materiales a base de silicio (Si3 N4 , SiC, Mullita), nunca estará controlada por movimiento de
dislocaciones a una temperatura inferior a 1700°C, por lo tanto, si se tiene en cuenta que la mayoría
de los materiales poseen una fase vitrea intergranular, a altas temperaturas esta fase tendrá una
viscosidad muy baja y la deformación se producirá fácilmente por deslizamiento entre granos antes
que por movimiento de dislocaciones. Esto siempre en los ensayos de flexión, en los cuales se
favorecen los mecanismos de deslizamiento intergranular. Sin embargo en los ensayos realizados en
compresión se podrá en algunos casos (muy pocos) observar el movimiento de las dislocaciones.
Una forma idónea de presentación de los mecanismos que actúan durante la deformación de los
materiales en función de la temperatura de ensayo, son los diagramas de deformación de Ashby. Estos
diagramas son similares a los diagramas de sinterización y permiten poner en evidencia el mecanismo
preponderante para unos parámetros experimentales dados. La figura 6.4.3.2 muestra un ejemplo del
mapa de deformación de la magnesia ( MgO)
171
Figura 6.4.3.2.- Mapa de deformación de la magnesia
De manera experimental se han determinado las expresiones analíticas que reflejan el efecto de la
tensión y de la temperatura sobre la velocidad mínima de fluencia. Todos los datos experimentales
quedan agrupados en la siguiente ley de comportamiento:
•
ε
f
= Aσ n e
−Q RT
(6.4.2.2)
donde A, n y Q son constantes características del material evaluadas en el ensayo. Q se conoce como
energía de activación de la fluencia. El parámetro n es aproximadamente igual a 1 para pequeñas
tensiones y cambia bruscamente a un valor comprendido entre 3 y 8 a partir de un cierto valor de la
tensión.
6.4.3.- Relajación de tensiones a altas temperaturas.
Como consecuencia de la deformación plástica continuada a lo largo del tiempo, la fluencia induce la
relajación de tensiones. Supongamos un componente (por ejemplo, un tomillo) cargado elásticamente
que mantenemos un tiempo largo a temperatura elevada. Si la deformación total de la pieza, εT, debe
mantenerse necesariamente constante, la deformación plástica de fluencia (ε f) irá sustituyendo
progresivamente a la deformación elástica (εe ) producida en el momento inicial, y como consecuencia
la tensión elástica decrece continuadamente (Figura 6.4.3.1). Se tiene pues que:
ε T = ε e + ε f = constante
(6.4.3.1)
172
Figura 6.4.3.1.- Variación de la deformación elástica y deformación afluencia.
Se denomina tiempo de relajación al tiempo necesario para que la tensión inicial se relaje hasta la
mitad de su valor. Se puede calcular como sigue derivando la ecuación (6.4.3.1) y la ecuación de
Hooke (σ =Eε):
dε f
dε e dε f
dε e
+
= 0,
=−
dt
dt
dt
dt
σ = Eε
d ε 1 dσ
=
dt E dt
→
como:
•
ε
f
=
dε f
dt
= Aσ n e
−Q RT
=
{T
cons tan te} = Bσ n
resulta:
dε f
dε e
=−
= − Bσ n
dt
dt
a bien:
1 dσ
= − Bσ n
E dt
separando variables:
integrando:
σ − n dσ = − BEdt
σ
∫σ 2 σ
−n
tr
dσ = − ∫ BEdt
0
de donde:
tr =
2n−1 − 1
(n − 1) BEσ n−1
Debido a fenómenos de relajación de tensiones deben apretarse cada cierto tiempo los tomillos de la
estructura de cierre de las turbinas para evitar fugas de vapor.
173
6.4.4.- Mecanismos justificativos de la fluencia.
6.4.4.1.- Introducción.
Existen básicamente dos mecanismos que tienen como punto en común la necesidad de la existencia de
fenómenos de difusión. La difusión comienza a hacerse apreciable a temperaturas superiores a 0.3TF
(K), lo que justifica el hecho de que la fluencia sólo se observa a temperaturas superiores a éstas.
6.4.4.2.- Movimiento activado de las dislocaciones.
La tensión necesaria para mover las dislocaciones y producir la deformación plástica en una estructura
cristalina (tensión de cortadura crítica) disminuye al aumentar la temperatura. Por este motivo, a
temperaturas elevadas, una tensión inferior a la correspondiente al límite elástico del material a
temperatura ambiente puede producir deformación plástica.
Por otro lado, una vez iniciada la deformación plástica de un material policristalino, la tensión precisa
para continuar la deformación será la suma de la resistencia intrínseca de la red al movimiento de las
dislocaciones más la necesaria para sobrepasar los obstáculos existentes a lo largo del recorrido de
éstas. A temperaturas elevadas, los fenómenos de difusión atómica ya son operativos, y permiten el
desbloqueo de las dislocaciones que a temperatura ambiente quedarían paradas delante de los
obstáculos que se encuentran en el curso de su deslizamiento y la superación de los obstáculos
estructurales: las dislocaciones liberadas continúan su movimiento bajo la acción de la tensión
aplicada produciéndose una deformación plástica dependiente del tiempo.
En las figuras 6.4.4.2.1, 6.4.4.2.2 y 6.4.4.2.3 se muestran gráficamente dichos fenómenos. En la figura
6.4.4.2.1 se presenta una dislocación tipo cuña bloqueada por la presencia de una partícula que
interrumpe su plano de deslizamiento. La reacción de la partícula sobre la dislocación tiene una
componente vertical (τbtgθ, siendo b el vector de Burgers de la dislocación) que va a posibilitar el
movimiento de ascenso de ésta. Se sabe que estos movimientos sólo son posibles a temperaturas
elevadas en virtud de los fenómenos de difusión.
Figura 6.4.4.2.1.- Dislocación tipo cuña bloqueada por la presencia de una partícula.
En la figura 6.4.4.2.2 se ve que el ascenso de la dislocación hasta el plano inmediatamente superior se
realiza gracias al desplazamiento (difusión) de la línea de átomos inferior de la dislocación. Vemos
entonces, que tras un cierto tiempo, necesario para que la difusión tenga lugar, la dislocación puede
finalmente franquear el obstáculo que representaba la partícula y continuar su movimiento sobre un
plano de deslizamiento paralelo al primero.
174
Figura 6.4.4.2.2.- Ascenso de la dislocación_
Finalmente, en la figura 6.4.4.2.3 se ve que una vez desbloqueadas las dislocaciones por el
movimiento de ascenso, deslizan normalmente hasta encontrar otro obstáculo que terminan superando
de la misma manera, repitiéndose este mecanismo una y otra vez a lo largo del tiempo de actuación de
la carga, lo que explica la naturaleza continua y progresiva de la deformación por fluencia.
Figura 6.4.4.2.3.- Ascenso y deslircnniento continuados de las dislocaciones.
Siendo la difusión atómica el fenómeno que controla la deformación a fluencia y dado que la variación
del coeficiente de difusión D con la temperatura sigue una ley de tipo Arrhenius:
D = D0e
−Q RT
(6.4.4.2.1)
la velocidad de fluencia viene expresada por la ley comentada anteriormente:
•
ε
f
= Aσ n e
−Q RT
(6.4.4.2.2)
El término Q definido como la energía de activación de la fluencia coincide con la energía de
activación de la difusión. En lo que respecta al efecto de la tensión aplicada σ, se debe hacer constar
que al aumentar ésta, también lo hace la fuerza mecánica vertical que promueve el ascenso de las
dislocaciones dando lugar al franqueo de los obstáculos en un tiempo menor, como consecuencia εf
aumentará al incrementar la tensión ejercida.
175
6.4.4.3.- Flujo difusivo.
Si la tensión aplicada a es muy pequeña el mecanismo anterior no es operativo y la fluencia observada
debe justificarse en virtud de un mecanismo alternativo representado en la figura 6.4.4.3.1 de esta
débil tensión, los granos se estiran en la dirección de tracción y se contraen en la dirección de
compresión como resultado de la difusión de los átomos de unos lugares a otros dentro de un mismo
grano. A temperaturas no muy elevadas, el movimiento atómico se debe principalmente a la difusión a
lo largo de las juntas de grano, mientras que a temperaturas mayores ya es posible la difusión
volumétrica a través de todo el volumen del grano.
Por otra parte, el cambio de la morfología de los granos exige además el deslizamiento de los mismos
sobre las juntas de grano para evitar la formación de cavidades en los puntos triples, puntos de unión
de 3 granos adyacentes). De cualquier manera, la fluencia progresiva según este mecanismo conducirá
finalmente a la nucleación de cavidades a lo largo de las juntas de grano que, por coalescencia,
producirán una rotura de tip6 intergranular.
Según este mecanismo la velocidad de deformación a fluencia será proporcional a la tensión aplicada
(el exponente n es igual a 1), y al coeficiente de difusión D. Siendo por otro lado las distancias de
difusión del mismo orden de magnitud que el tamaño de grano, la velocidad de deformación a fluencia
será inversamente proporcional al diámetro del grano elevado al cuadrado.
•
ε
f
σ −Q
= B 2 e RT
d
(6.4.4.3.1)
Figura 6.4.4.3.- Fluencia por flujo difusivo.
5.4.5.La respuesta a fluencia de los materiales refractarios se ha expresado mediante diferentes ecuaciones.
Entre ellas se tiene:
176
ε c = e a t bσ c e
−Q RT
(6.4.5.1)
donde:
εc = Deformación total por fluencia (%).
e = Número e (= 2.71828…)
t = Tiempo
σ = Tensión aplicada
T = Temperatura absoluta
R = Constante de los gases
Q = Energía de activación
a, b, c = Constantes dependientes del tipo de material refractario.
Otras ecuaciones son:
ε c = e atσ c e
−Q RT
ε c = Af ( s )tσ c e
(6.4.5.2)
−Q RT
(6.4.5.3)
donde:
A, f(s) = Constantes dependientes del tipo de material refractario. f(s) se denomina término estructural
a
Básicamente, las tres ecuaciones son similares. Los términos constantes e , A y f(s) no varían con el
tiempo.
La figura 6.4.5.1 describe la deformación total por fluencia que tendría lugar en un material
refractario sometido a una carga constante F.
Figura 6.4.5.1.- Respuesta a fluencia de los materiales refractarios.
La deformación inicial ε0 , debido al desplazamiento del material independiente del tiempo, es una
combinación de la deformación elástica y plástica debida a la carga aplicada.
Los ladrillos refractarios que deben calentarse de manera multilateral y uniforme y durante mucho
tiempo bajo carga, se controlan en un ensayo de larga duración para determinar su comportamiento de
fluencia bajo presión. El equipo utilizado es el mismo que para el ensayo de refractariedad bajo carga.
177
Para ello se calientan probetas de 50 mm de altura y 50 mm de diámetro con taladro interior para la
aplicación del palpador, bajo la carga indicada, que normalmente suele ser de 0.2 N/mm 2, a
temperatura constante, y se mantienen después de alcanzar la temperatura de control elegida de 10 a
50 horas bajo carga constante. La contracción de la pieza de prueba después de alcanzar la máxima
dilatación se indica en función del tiempo de prueba como medida de fluencia bajo presión en la
temperatura de prueba establecida.
En la figura 6.4.1.1 se muestran las curvas de fluencia bajo presión para algunos tipos de ladrillos. Se
puede observar que que los ladrillos de corindón de alta cocción con 98 % Al2 O3 aproximadamente y
de magnesia pobre en hierro con 95 % MgO aproximadamente, experimentan una contracción de la
pieza muy pequeña, mientras que la de los ladrillos aluminoso, de aproximadamente 65 % Al 2 O y de
magnesia-cromo de alta cocción con 10 % Cr2O3 aproximadamente, es mayor.
Figura 6.4.1.1.-Comportamiento de fluencia bajo presión de ladrillos refractarios a 1500 °C.
1.2.3.4.-
Ladrillo
Ladrillo
Ladrillo
Ladrillo
aluminoso, se trata de un ladrillo de aproximadamente 65 % Al 2 O3.
de corindón de alta cocción con 98 % Al 2 O3 aproximadamente.
de magnesia-cromo de alta cocción con 10 % Cr2 O3 aproximadamente.
de magnesia pobre en hierro con 95 % MgO aproximadamente.
7.- Propiedades químicas.
7.1.- Resistencia al ataque por escorias.
Los materiales refractarios, durante su utilización, se ven sometidos a acciones químicas, entre las que
destaca el ataque de las escorias. La elección de un refractario para una aplicación determinada,
depende considerablemente de su resistencia frente a las escorias. Así, en la manufactura del acero por
el procedimiento Siemens, la solera del horno está sometida al ataque de escorias básicas de afino,
formadas por la interacción de la cal con las impurezas silíceas y las trazas de azufre.
Las escorias metalúrgicas se caracterizan, al igual que los materiales refractarios, por estar
constituidas, básicamente, por óxidos metálicos térreos: SiO2 , Al 2 O3 , CaO, MgO, etc. Además,
aparecen en su composición otros componentes, en menor concentración, tales como óxidos metálicos
(Fe2 O3 , FeO, MnO, etc.) y óxidos alcalinos (Na2 O, K2 O, etc.).
178
La escoria que aparece durante un proceso metalúrgico, debe ser suficientemente fluida y, a la vez, de
alta actividad química, con el fin de facilitar los intercambios de materiales. Como consecuencia, el
refractario que se elija, debe tener una composición adecuada, de tal manera que la escoria no sea
fundente suyo. Ello exige, a "grosso modo", que la acidez o basicidad de ambas sustancias sea
paralela. No obstante, es imposible evitar cierta interacción físico - química entre ellas. Así, los
constituyentes (disperso y matriz) del refractario y de la escoria pueden reaccionar y dar lugar a
compuestos químicos diferentes. Los mecanismos que tienen lugar son:
1.- Disolución - reacción con formación de un compuesto de bajo punto de fusión al contactar el
material refractario con los diversos componentes de la escoria metalúrgica (Reacción refractario escoria).
2.- Reducción metalotérmica del material refractario por los metales activos presentes en la aleación
fundida (Reacción refractario - metal activo).
Es importante que el producto resultante de tales mecanismos sea de alta viscosidad, así no será fácil
eliminarlo de la interfase de reacción, con lo que ésta no podrá progresar, y de alta refractariedad, para
que forme sobre el refractario una capa protectora que lo pasive frente a un ataque progresivo. Así, por
ejemplo, el arrabio se infiltra en el refractario de la solera del horno alto y, al solidificar cuando
alcanza cierta profundidad, impide la progresión del ataque del metal a otras zonas del material
refractario (el propio agente agresor constituye un impedimento contra lo que pode a ser un ataque
generalizado del metal).
Un ejemplo típico de reacciones refractario - escoria, son las que tienen lugar entre la familia
refractaria sílico - aluminosa y la escoria de horno alto.
Según las energías libres de formación de los diferentes silicatos metálicos en función de la
temperatura, se formaría, en principio, silicato bicálcico Ca2 SiO4 (2CaO.SiO2) el cual, a su vez, puede
ser atacado por la sílice de la escoria, según la reacción:
Ca2SiO4 ( s ) + SiO2 → 2CaSiO3 (wollastonita)
(7.1.1)
ya que, termodinámicamente, es favorable, pues ∆G(T ) < 0 .
No obstante, a pesar de que la reacción (7.1.1) sea termodinámicamente favorable, pueden existir
impedimentos cinéticos que dificulten su progresión. Si la temperatura en la interfase de contacto
refractario - escoria es sensiblemente inferior al punto de ablandamiento del producto formado, la
eliminación del mismo y la consiguiente formación de una nueva interfase refractaria - escoria, sería
poco probable bajo las condiciones normales de operación del sistema. Contrariamente, si el producto
formado tiene una pequeña viscosidad, ésta puede desprenderse con facilidad, dando lugar a la
reapertura de un nuevo frente de reacción.
Así pues, la velocidad de reacción depende, en gran medida, de la temperatura del proceso, y pequeños
incrementos de ésta, pueden acelerarla notablemente. La velocidad de reacción y la temperatura están
relacionadas por la ecuación de Arrhenius:
K
1 1
Log 2 = A −
K1
T1 T2
(7.1.2)
donde K1 y K2 son las velocidades de reacción a las temperaturas absolutas Tl y T2 respectivamente,
y A una constante que, para materiales cerámicos, es del orden de 10000.
El comportamiento del material refractario, frente a las escorias, puede ser estudiado con ayuda de los
diagramas de fases (binarios, ternarios, cuaternarios, etc.) que indican la pérdida o ganancia de
179
refractariedad (formación de lodos o costras de geometría irregular en las paredes de los hornos) del
producto formado.
Ejemplo típico de reacciones refractario - metal activo, son las que tienen lugar en las últimas etapas
de la elaboración de un acero (desoxidación y desulfuración), cuando se añaden, para tales fines,
metales activos como el aluminio (Al), calcio (Ca), y metales de las tierras raras (Ce, Dr, Nd). Así, al
añadir aluminio, puede tener lugar la reacción:
Ca2SiO4 ( s ) + Al → Si + 2CaO .Al 2O3 (f )
(6.1.3)
que es una reducción metalotérmica, donde Al y Si representan el aluminio y el silicio disueltos en el
acero.
Para determinar la resistencia al ataque físico - químico de los materiales refractarios por las escorias
no existe un ensayo único y según Clements : "La búsqueda de un ensayo estándar de resistencia al
ataque químico ha sido abandonado, y hoy se acepta generalmente que sólo se puede predecir el efecto
de una escoria dada sobre un refractario dado, a una temperatura dada, ensayando ese material con esa
escoria, a esa temperatura y, si es posible, en la atmósfera correcta. Para que la simulación sea
perfecta, se deben también retirar los productos de la reacción a la velocidad adecuada. Cualquier
desviación de estas condiciones, conducirá a resultados falseados".
Para determinar la resistencia a las escorias se utilizan ensayos comparativos, con las ventajas y
desventajas que tiene cada uno.
En la figura 7.1.1, se presentan diversos esquemas de algunos de los ensayos simulados más
importantes:
(a).- Ensayos de inmersión (en los cuales el refractario está siempre en contacto con la escoria).
(b).- Ensayos giratorios (en los cuales el refractario no siempre está en contacto con la escoria).
180
(b)
Figura 7.1.1.- Resistencia al ataque por escorias.
(a).- Ensayo de inmersión. (b).- Ensayo giratorio.
Según el método denominado como método de crisol se taladra un crisol en el ladrillo a controlar
(Figura 7.1.2), el cual se llena con polvo de escoria activa en cantidad determinada. El crisol con la
escoria se mantiene durante un tiempo establecido a una temperatura de unos 100 K sobre el punto de
fusión de la escoria, sin rebasar no obstante a ser posible los 1500 °C. Una vez enfriado se corta el
crisol y se analiza la profundidad y la progresión del ataque que ha experimentado la probeta de
material refractario (Figura 7.1.3)
El ensayo sería indicativo si existiera una franca reacción química refractarios-escoria, ya que si lo que
realmente se realiza es la penetración de la escoria, la interpretación de la progresión de la interfase
refractario-escoria resultaría más problemática. En tal situación, quedaría por determinar si la
infiltración constituye o no un serio problema durante el servicio.
Figura 7.1.2.- Método del crisol.
181
Figura 7.1.3.- Crisol de corrosión después del efecto producido por la escoria.
Por su parte, en la figura 7.1.4 puede verse la sección transversal del efecto producido por una escoria
básica en un ladrillo de magnesia, aluminoso y de sílice.
182
Figura 7.1.4.- Efecto producido por una escoria básica en un ladrillo de (a).- magnesia (b).- aluminoso
(c).- sílice.
En el método de dispersión y con el objeto de aproximar más el proceso a la práctica, se va
dispersando más y más la cantidad de escoria en el cilindro caliente de prueba. Después de la prueba
se miden las modificaciones de peso y volumen y se hace una consideración del aspecto que presenta.
En el control que se denomina prueba de dedo, se corta una barra del material refractario. Se hace rotar
la barra a la temperatura de control en un recipiente mayor de refractario o de platino lleno de escoria
o de vidrio. De esta manera se evita en gran medida el endurecimiento del material de escorificación
como suele ocurrir en la prueba del crisol. Cuando se hace un análisis con temperatura y tiempo
constantes, puede utilizarse la reducción del volumen de la barra rotatoria en el sector atacado por la
escoria como número de referencia para una calidad de ladrillos.
En una prueba de escorificación próxima a la práctica para ladrillos de bóveda y techo se puede
controlar la resistencia a las cargas térmicas y químicas. Para lograr este objetivo se incorporan a un
horno de cámaras estacionario un paquete entero de ladrillos a controlar en calidad de bóveda
suspendida. Existe la posibilidad de soplar polvo de escoria o gases sobre la superficie caliente del
ladrillo y producir una infiltración en los ladrillos de control.
7.2.- Resistencia a gases y vapores.
No son sólo las escorias líquidas o las fusiones de vidrio las causas que producen la destrucción de
ladrillos, sino que los gases y vapores influyen también considerablemente en la duración. Los
ejemplos más conocidos son:
Un caso especial de agresividad química , a 400-500 ºC, lo constituye el monóxido de carbono
contenido en la atmósfera que se encuentra en contacto con el material refractario. La deposición de
carbono en los poros abiertos del material refractario según la reacción:
2CO ⇔ CO2 + C
(Reacción de Boudouard)
que se encuentra catalizada (acelerada) por la presencia de carburo de hierro, el cual se forma en
atmósfera reductora a partir de partículas de Fe2 O3 presentes como impurezas en las materias primas
refractarias, a temperaturas comprendidas entre los 400°C y 700°C.
Se produce la acumulación de carbono en el interior del ladrillo, que puede conducir a reblandecer y a
romper la estructura del ladrillo. El carbono que se deposita en los poros y fisuras del material, puede
183
dar lugar a grandes tensiones mecánicas cuyo resultado puede ser la desintegración total o parcial de
las piezas de refractario.
La norma española contempla tiempos de exposición hasta de 500 horas de la probeta refractaria en
contacto con el monóxido de carbono a la temperatura de 500 °C. El ensayo se realiza en
condiciones más severas que las de servicio para permitir valorar el comportamiento probable
de los materiales refractarios en un tiempo relativamente corto.
Las probetas de ensayo se exponen a una atmósfera especificada de monóxido de carbono a una
temperatura controlada durante un tiempo especificado. En la figura 7.2.1 se muestran dos
ejemplos de aparatos de ensayo.
El control del nivel del óxido férrico Fe2 O3 presente en el material refractario puede realizarse, bajo
condiciones reductoras, favoreciendo la formación del compuesto fayalita 2FeO.SiO2 . No obstante,
hay que tener presente que la refractariedad del ladrillo va a disminuir con relación al tanto por ciento
de fayalita presente en el constituyente matriz.
Las probetas deben ser prismas rectangulares con una sección cuadrada de 50 mm ± 2 mm. 64 mm ± 2
mm o 76 mm ± 2 mm. La longitud de los prismas debe acordarse entre las partes interesadas pero debe
ser como mínimo de 76 mm.
Para los materiales cocidos sólo debe extraerse una única probeta de cada muestra y cortase de tal
forma que al menos tres de sus caras sean superficies originales de la muestra.
Las probetas de materiales no cocidos deben prepararse conforme a las instrucciones del fabricante o
de manera apropiada en función de tipo de material. Alternativamente, las probetas pueden cortarse a
partir de piezas preparadas más grandes.
Las probetas deben cocerse en una atmósfera oxidante a una velocidad no superior a 5 ºC/min hasta los
540 ºC, mantenerse a esta temperatura durante 5 h y finalmente, enfriarse y almacenarse en un
desecador
184
1.- Carcasa del horno, 2.- Tubo de salida del gas, 3.- Cámara de reacción, 4.- Tapón hermético
5.- Soporte de la probeta, 6.- Probetas, 7.- Tubo de entrada del gas, 8.- Dispositivo para la medida de
la temperatura 9.- Soporte del tubo.
Figura 7.2.1.- Ejemplos de aparato de ensayo
Procedimiento operatorio.
Se secan las probetas de materiales cocidos a 110 ºC ± 5 ºC y se dejan enfriar en el desecador. Se
colocan las probetas ya frías sobre los soportes en la zona de ensayo de la cámara de reacción
separadas entre sí al menos 20 mm para permitir que el gas circule libremente.
Se inserta el dispositivo de medida de la temperatura y se verifica que se ha instalado correctamente.
Se cierra la cámara de reacción y se hace circular nitrógeno por la cámara y se calientan las piezas a
una temperatura de 500 ºC ± 10 °C mientras el nitrógeno continúa circulando por la cámara.
Cuando las probetas han alcanzado la temperatura del ensayo, se interrumpe el flujo de nitrógeno y se
modifica el contenido en monóxido de carbono de la atmósfera hasta un nivel mínimo del 95 % como
se indica en el análisis de los gases de escape Se anota la hora y la fecha.
185
Se regula el flujo de monóxido de carbono a una velocidad nominal no inferior a 30 cm 3 /h
por cada 15 cm 3 de volumen total de muestra. Se analizan los gases de escape al cabo de una hora y, si
es inferior al 95 % en monóxido de carbono, se aumenta el flujo del gas. Se repite el análisis y el
ajuste del flujo hasta que los gases de escape contengan más del 95 % de monóxido de carbono. Se
analizan los gases de escape al menos dos veces al día durante el transcurso del ensayo y se mantiene
el contenido en monóxido de carbono de la atmósfera de la cámara en un nivel superior al 95 %
El flujo inicial de 30 cm 3 /h por cada 15 cm 3 de volumen total de muestra se considera el flujo mínimo
con el que se puede realizar el ensayo. Para los materiales de los que se sospecha pueden reaccionar
significativamente con el monóxido de carbono, puede precisare de un flujo 2 ó 3 veces superior para
mantener la atmósfera de la cámara En estos casos, puede ser conveniente reducir el tamaño y el
numero de probetas en la cámara para evitar el uso excesivo de monóxido de carbono.
Se prosigue el ensayo durante 200 h, después se hace circular una corriente de nitrógeno para limpiar
la cámara del horno. Se apaga el horno y se deja que la cámara se enfríe. Se anota la hora y la fecha a
la que se finaliza el ensayo, se retiran las probetas con cuidado, se examina su estado y se procede al
registro fotográfico de su aspecto.
Cuando el aparato de ensayo dispone de medios para la observación directa de las probetas, pueden
realizarse controles cotidianos y anotarse los resultados. El ensayo puede finalizarle cuando la probeta
o la mitad de las probetas presenten signos de disgregación Las partes interesadas pueden acordar una
mayor o menor duración del ensayo.
(A).- El estado de las probetas debe describirse conforme a las siguientes clasificaciones:
1.- No afectada no afectada: ninguna señal visible de deposición de carbono, de fragmentos
superficiales o de fisuras;
2.- Daño en la superficie: fragmentos superficiales o fracturas, de diámetro inferior o igual a 10 mm,
3.- Fisura: fisuras visibles en las probetas, y/o fracturas o fragmentos superficiales de diámetro
superior a 10 mm.
4.- Desintegración: rotura de las probetas en dos o más piezas, o rotura provocada por simple presión
manual,
(b).- Cuando el estado de las probetas es variable debe indicarse el número de probetas incluidas en
cada clasificación.
Destrucción de los ladrillos refractarios por efecto del metano por encima de los 900 °C. También
aquí se produce una acumulación de carbono en partículas de óxido de hierro y una reducción de
uniones de hierro en el interior de los ladrillos con un reblandecimiento de su estructura.
Influencia de la atmósfera reductora y oxidante variable en los productos que contienen mineral de
cromo a unos 1000 ºC ó más. Se producen reblandecimientos lentos y destrucciones de la estructura
por el hecho de que el mineral de cromo en su fase de oxidación no conserva su resistencia en tales
condiciones.
Influencia de los álcalis portados en forma de vapor en la sinterización y deformaciones posteriores de
ladrillos que pueden estar relacionados con el ascenso o descenso de las características refractarias.
Formación de nefelina (Al 2 O3. 2 SiO2 . Na2 O) o caliofilita (Al 2 O3. 2 SiO K2 O) en la zona de borde de
ladrillos de chamota, de silimanita y de corindón motivado por la absorción de Na2 O o K2 O de la
atmósfera alcalina en altos hornos y regeneradores de hornos de fusión de vidrio y hornos MS. Se
produce un desprendimiento de finas cortezas motivado por la dilatación del volumen producida en la
formación de nuevos minerales.
186
Un desgaste químico en caso de infiltración de sales alcalinas se caracteriza por el aporte de Na2 O,
-
K2 O, Cl y SO3 , es decir, NaCl, Na2 SO4 , etc.). Esta infiltración resulta en general en una
densificación de la estructura del ladrillo que se puede extender hasta la cara fría del mismo debido a
las temperaturas de solidificación/sublimación (> aprox. 600ºC) de las sales alcalinas (la infiltración
de clínker fundido siempre ocurre en la cara caliente). Se pueden crear claras zonas de diferente
densificación.
La infiltración de sales alcalinas puede en caso de corrosión llevar a un debilitamiento o pérdida del
ligante estructural en los ladrillos básicos. Macroscópicamente esto puede llevar a una estructura frágil
con más o menos fisuras. Por ejemplo en caso de exceso de componentes ácidos (principalmente Cl- y
SO3 ) en comparación con los básicos (Na2 O y K2 O) hay una reacción preferencial con las fases de
CaO inherentes al ladrillo y con el MgO del propio ladrillo, respectivamente, que resulta en la
corrosión de la ligazón estructural.
Un exceso de álcalis puede llevar a ataque corrosivo -por ejemplo sobre la cromita- bajo determinadas
circunstancias.
Otra posible consecuencia es la corrosión de zonas/partes del ladrillo causada por fundido agresivo de
sales alcalinas sobrecalentado.
A menudo la formación de fisuras y el desconchamiento puede observarse en zonas degeneradas del
ladrillo. Incluso la carga mecánica normal debida a la rotación del horno puede originar la formación
de fisuras. Si hay placas de acero en zonas con sales alcalinas, estas normalmente aparecen como un
metal.
En la figura 7.2.2. puede verse la densificación de la estructura del ladrillo debida a fuertes
infiltraciones alcalinas hasta la cara fría del mismo. Se puede observar la fuerte infiltración alcalina y
la compactación de la zona central del ladrillo. La estructura de la cara caliente del ladrillo se aprecia
destruida y severamente debilitada en su ligante por la corrosión del paso a través de sales alcalinas.
Figura 7.2.2.-Densificación de la estructura del ladrillo debida a fuertes infiltraciones alcalinas hasta la
cara fría.
En la figura 7.2.3 se da una estructura altamente densificada, en la que la fisura está cubierta por sales
alcalinas. La superficie de color marrón claro debida al depósito de polvo de clínker.
187
2
1
Figura 7.2.3.- Estructura altamente densificada. La fisura está cubierta por sales alcalinas (1).
Superficie de color marrón claro debida al depósito de polvo de clínker (2).
Los ladrillos se rompen paralelos a la cara caliente (Figura 7.2.4). Los ladrillos están hasta el tercio
frío altamente densificados con sales alcalinas. La fisura está cubierta con cristales de sales alcalinas
(blanco).
Figura 7.2.4.- Fisura cubierta con cristales de sales alcalinas (blanco)
Destrucción de los ladrillos de chamota, de silimanita y de sílice en instalaciones desintegradoras de
aceite por enriquecimiento de V2 O5 y Na2 SO4 de ciertas cenizas de aceite.
Cuando los ladrillos refractarios son agredidos por gases o vapores, es difícil con frecuencia
determinar la causa destructora. Suele ocurrir de hecho, que los productos mismos de reacción se
evaporen nuevamente y no dejen o queden muy pocas huellas en los ladrillos fisurados
7.3.- Resistencia a los ácidos.
Se especifica un método para determinar la resistencia de los productos refractarios de conformación
densa al ataque del ácido sulfúrico. Se utiliza dicho ácido porque proporciona resultados considerados
como característicos de los obtenidos en la exposición de materiales refractarios a numerosos ácidos
(otros ácidos distintos al fluorhídrico).
La muestra de ensayo, triturada de una forma determinada, se somete durante 6 h al ataque de una
disolución en ebullición de ácido sulfúrico al 70 % ( ρ = 1.615 g/cm 3 ) y se determina la perdida de
masa resultante expresada como porcentaje de la masa inicial del material seco.
188
En la figura 7.3.1 puede verse un diagrama de flujo del procedimiento operatorio del ensayo.
Figura 7.3.1.- Diagrama de flujo del procedimiento operatorio
189
Se realizan, al menos, dos ensayos en paralelo. Para cada ensayo, se pesan unos 20 g del material seco
(masa C 1 ) con una precisión de 0.001 g.
El material así pesado se introduce en un matraz y se recubre con 200 cm3 de ácido sulfúrico. Se
adapta el refrigerante de serpentín y se introduce el termómetro de tal forma que quede inmerso en, al
menos, 15 mm de líquido.
Durante, aproximadamente, 30 minutos se lleva a ebullición el contenido del matraz con la ayuda del
baño de arena, del baño de aceite o con la manta calefactora. El punto de ebullición del ácido sulfúrico
al 70 % es de, aproximadamente, 170 ºC. Se anota la temperatura a la que el líquido comienza a hervir.
Se mantiene el líquido en ebullición suave durante 6 horas. Transcurrido dicho tiempo, se anota la
temperatura del líquido.
Tras la ebullición del líquido durante 6 horas se retira el matraz del baño o de la manta calefactora y se
deja enfriar durante l hora. Se decanta el ácido que sobrenada en la muestra. Se vierte con precaución
500 cm 3 de agua destilada, y se lava el contenido del matraz en el embudo de filtración de porcelana,
previamente secado y pesado con una precisión de 0.001 g. Se utiliza una bomba de agua para facilitar
la filtración. Se lava con agua destilada el residuo, en el embudo, hasta que las aguas de lavado
permanezcan claras tras la adición de unas gotas de la disolución de cloruro de bario.
Se seca en la estufa el embudo que contiene el residuo, a una temperatura controlada de 110 ºC ± 5 ºC
y
hasta masa constante. Antes de cada pesada, se deja que el embudo y su contenido alcancen la
temperatura ambiente en el desecador.
Se pesan el embudo y su contenido con una precisión de 0.001 g. Para obtener la masa del residuo
(masa C 2 ) se resta la masa del embudo.
Se calcula la perdida en masa del material de ensayo L % como porcentaje de su masa inicial, de
acuerdo con la siguiente fórmula:
L=
C1 − C2
100
C2
donde
C1 = Masa inicial, en gramos, del material de ensayo:
C2 = Masa, en gramos, del residuo.
En la figura 6.3.2 puede verse el equipo para la determinación de la resistencia a los ácidos, en el cual
se utiliza para el calentamiento una manta calefactora.
Este ensayo se realiza en los materiales refractarios que se utilizan para la realización
conductos de humos de las chimeneas de centrales térmicas, petroquímicas, etc. (Figura 7.3.3)
de los
190
Figura 7.3.2.- Equipo para la determinación de la resistencia a los ácidos.
191
Figura 7.3.3.- Conductos de humos de una chimenea industrial.
192
7.4.- Resistencia a la hidratación (vapor de agua).
Destrucción los productos que contienen carburo de silicio en atmósfera oxidante con contenido de
vapor de agua a 900- 1100°C.
Los ladrillos refractarios que contienen gran cantidad de CaO libre pueden descomponerse
materialmente por completo antes de proceder al montaje por la circunstancia del vapor de agua que
contiene el aire, debido a la transformación del CaO en Ca(OH)2 con el consiguiente aumento de
volumen. Estas muestras surgen en los ladrillos de magnesia sin CaO libre y que se denominan de
hidratación, a lo sumo cuando se someten a atmósfera acuosa durante un tiempo largo a temperaturas
superiores, pero siempre por debajo de la temperatura de transformación de los hidróxidos de
magnesia que pudieran haberse formado eventualmente.
193