SISTEMA DE DETECCION VISUAL DE COLUMNAS DE HUMO
Anuncio

SISTEMA DE DETECCION VISUAL DE COLUMNAS DE HUMO
F. Gómez-Rodríguez y B.C. Arrue
Departamento de Ingeniería de Sistemas y Automática. Universidad de Sevilla.
Camino de los Descubrimientos s/n. 41092 Sevilla.
{gomezro,barrue }@cartuja.us.es
Resumen
Este trabajo presenta un método para la detección de
columnas de humo analizando secuencias de
imágenes visuales. Una vez detectada la columna de
humo se realizan estimaciones sobre algunas
características de la columna de humo, necesarias
para llevar a cabo estrategias de extinción de
incendios forestales y validar modelos. La
metodología que aquí se presenta está basada en un
sistema de procesado de imágenes digitales
utilizando técnicas Wavelet y técnicas obtención del
Flujo Óptico. En este trabajo se presentan también
algunos experimentos que demuestran la utilidad de
sistema
Palabras Clave : Detección de columnas de humo,
procesado de imágenes, Wavelet, Flujo Óptico,
sistema de percepción
1
INTRODUCCION
Año tras año los incendios devastan grandes
extensiones forestales. En Europa existen varios
proyectos de investigación como es el caso de los
proyectos MINERVE I, MINERVE II, INFLAME y
SPREAD
dedicados
a
comprender
el
comportamiento del fuego para de esa manera
minimizar los efectos de este en el medio ambiente.
Por otra parte contar con una herramienta que
permita detectar los focos de incendio es de vital
importancia para evitar que dichos focos se
conviertan en catástrofes naturales. existen diversos
sistemas de detección de incendios algunos de ellos
basados en imágenes por satélite, otros basados en
procesamiento de imágenes infrarrojas tomadas
desde torres en tierra como por ejemplo el sistema
BOSQUE de la empresa pública IZAR-BAZAN, este
sistema tiene como principal desventaja que las
cámaras infrarrojas son extremadamente caras y con
un mantenimiento muy costoso. En este trabajo se
presenta un método que utiliza cámaras visuales
mucho mas baratas y sin mantenimiento.
Las características especiales del humo lo convierten
en un objeto de especial interés para los
investigadores en visión artificial. El humo puede
considerarse como un objeto no-rígido, este tipo de
objetos presentan la particularidad de que cambian de
forma a lo largo de tiempo. Para llevar a cabo la
detección de este tipo de objetos parece lógico usar
un método centrado en el movimiento. Así pues en
este trabajo se presenta un método que combina de
técnicas ampliamente conocidas en el campo de la
visión artificial como son la Transformada Wavelet
y la obtención del Flujo Óptico. Por una parte la
Transformada Wavelets no permite hace un análisis
multirresolución
además
de
existir
una
implementación fácil en un ordenador [8], por otro
lado el Flujo Óptico permite la obtención del una
aproximación (en el plano de la imagen) del
movimiento presente una secuencia de imágenes.
Como se verá más adelante el método desarrollado
detecta la presencia de una columna de humo,
discriminando esta de otros posibles movimientos
presente en la imagen. En las siguientes secciones se
muestra la metodología usada y el resultado de la
misma.
2
WAVELETS Y FLUJO ÓPTICO
Una Wavelet es una forma de onda de duración
limitada que tiene un valor medio cero. Así como el
análisis de Fourier básicamente consiste en
descomponer la señal en ondas sinusoidales de
diferentes frecuencias, el análisis de Wavelets
consiste en la descomposición de una señal arbitraria
f en versiones escaladas y trasladadas de la señal
Wavelet original. Es decir, la idea básica de esta
transformada consiste en representar cualquier
función f como una superposición de un conjunto de
dichas Wavelets o funciones base.
La transformada de Wavelets de una señal f es la
familia de coeficientes C(a,b), que dependen de dos
índice a y b que se asocian con al escaladas y la
posición de la señal. En una sola dimensión estos
coeficientes se obtienen de la forma:
1 x −b
ψ
dx
−∞
a a
a ∈ R + − {0} y b ∈ R
+∞
C (a , b) = ∫ f ( x )
(1)
A la vista de la ecuación anterior esta transformada
se define como la suma sobre todo el intervalo de la
señal multiplicada por las versiones escaladas y
trasladadas de la función Wavelet ψ . Multiplicando
cada coeficiente por la apropiada Wavelet escalada y
trasladada obtenemos la Wavelets que componen la
señal original. Escalar una Wavelet significa
simplemente comprimirla o expandirla, por tanto a es
el factor de escala.
En el caso de bidimensional la familia Wavelets
viene dada por
x −b x −b
1
ψ 1 1 , 2 2
a2
a1a2 a1
con
de tiempo dt y el campo de Flujo Óptico es el campo
de velocidad que representa el movimiento
tridimensional de puntos de los objetos a través del
movimiento bidimensional de la imagen.
El objetivo, por tanto, es obtener:
dx dy
V = (v1 , v 2 ) = ,
(4)
dt dt
Sea I ( x, y, t ) una secuencia de imágenes. Si
suponemos que el objeto en movimiento mantiene su
brillo formalmente es posible decir que:
I ( x, y, t ) ≈ I ( x + ∂x, y + ∂y, t + ∂t ) (5)
(2)
x = ( x1 , x2 ) ∈ R 2 , a1 > 0, a 2 > 0 ,
b1 ∈ R y b2 ∈ R
Así, por tanto:
Resulta imposible realizar los cálculos de los
coeficientes para todas las escalas y posiciones, por
lo que se recurre a la versión discreta denominada
Transformada discreta de Wavelet (TDW) donde se
elige un subconjunto de escalas y posiciones. El
análisis resulta mucho más eficiente y preciso cuando
el subconjunto de escalas y posiciones son potencias
de 2.
C (a , b) = C ( j, k ) = ∑ f ( x) g j ,k ( x )
x∈Z
con
(3)
a = 2 ,b = 2 , j ∈ N , k ∈ Z
j
k
Una forma eficiente de implementar este esquema
fue desarrollado por Woods y O’Neill [14] y
posteriormente por Mallat [8] mediante el uso de
filtros. Para muchas señales, el contenido de baja
frecuencia es la parte más importante por que
proporciona a la señal su identidad, éste puede ser el
caso de las imágenes. Por otra parte, el contenido de
alta frecuencia matiza ese contenido. Por este motivo,
se habla de descomposición de la imagen en dos
componentes: (a) aproximación y (b) detalle de la
imagen. El resultado de descomponer la imagen en
versiones paso de bajo y paso de alto, se conoce
generalmente como sub-bandas. Cada una de estas
sub-bandas se puede seguir descomponiendo por el
mismo procedimiento. De esta manera se dice que la
TDW descompone una imagen en un cierto número
de bandas de frecuencia.
El análisis del movimiento a partir de una secuencia
de imágenes se encamina hacia la estimación del
movimiento relativo entre los objetos en la escena y
las imágenes. Uno de los métodos más importantes
para la estimación del movimiento está basado en el
gradiente, i.e., cambio de los niveles de intensidad en
la imagen. El Flujo Óptico refleja los cambios de la
imagen debidos al movimiento durante un intervalo
∂I
∂I
∂I
* v1 + * v2 +
=0
∂x
∂y
∂t
(6)
Que constituye la ecuación principal del flujo óptico.
Esta ecuación presenta dos incógnitas, v1 y v2 y tres
parámetros de más o menos inmediata estimación.
V1: Velocidad en el sentido columnas ?.
V2: Velocidad en el sentido filas? .
Ix: Derivada parcial de la función intensidad de la
imagen con respecto a las x (columnas).
Iy: Derivada parcial de la función intensidad de la
imagen con respecto a las y (filas).
It : Derivada parcial de la función intensidad de la
imagen con respecto al tiempo, es decir, una imagen
frente a la siguiente en la secuencia.
Se observa que esta ecuación no es suficiente para la
estimación del Flujo Óptico, esto es conocido como
el problema de la apertura de la ecuación del Flujo
Óptico.
2.1
EL PROBLEMA DE LA APERTURA
Como se ha dicho la ecuación de Flujo Óptico no es
suficiente para obtener las incógnitas deseadas. A
este hecho se le conoce como el problema de la
apertura según el cual sólo podrá determinarse la
velocidad de los píxeles que viajen en sentido
perpendicular al gradiente de la imagen:
− It *(
(v1 , v 2 ) =
dI dI
, )
dx dy
dI dI
( , )
dx dy
2
(7)
Para poder realizar una medición del movimiento real
en la escena deben cumplirse las siguientes
condiciones: a) Iluminación uniforme, b) que en la
escena las superficies de los objetos sean
lambertianas c) traslaciones paralelas al plano de la
imagen. En una escena real esto nunca se cumple. El
grado de cumplimiento de estas condiciones
determinará la fiabilidad de la medida del
movimiento. Además la existencia de oclusiones,
movimientos transparentes y objetos no-rígidos
(objetivo de este trabajo) incrementan la complejidad
de la medición del Flujo Óptico.
Existen en la literatura multitud de métodos para
resolver el problema de la apertura de la ecuación del
Flujo Óptico [1]. Es precisamente un método basado
es la transformada Wavelets el que ofrece mejores
resultados [2] y el que se aplica en este trabajo.
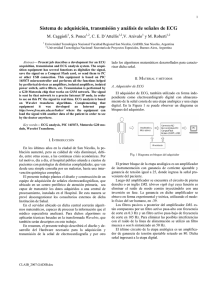
resultados son acumulados durante 4 imágenes
consecutivas. Se observa que el procedimiento
propuesto es capaz de detectar y seguir la columna de
humo, capturando el movimiento de la misma.
La solución planteada al problema de la apertura
consiste en disponer de una base de Wavelets
discreta:
(8)
Figura 1 Procesamiento de una secuencia en entorno
forestal por el sistema BOSQUE (IZAR-BAZAN).
donde j es el índice de resolución, (k, k’) son los
índices de traslación en 2 dimensiones. Haciendo las
operaciones matemáticas e introduciendo la ecuación
del Flujo Óptico (6) aquí, se obtiene:
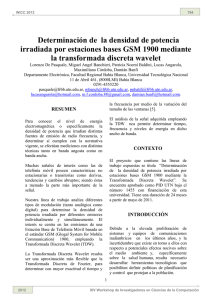
La secuencia que se muestra en la Figura 2 está
tomada de los experimentos que se realizan en
Coimbra todos los años, en el marco del proyecto
europeo SPREAD.
ψ sjkk' = 2 jψ s ( 2 j x − k ,2 j y − k ' )
dI n
dI
dI
* v1 ,ψ un +
* v 2 ,ψ un +
,ψ u = 0
dt
dy
dx
(n=1..N)
(9)
que escrito de forma compacta:
v x
M jkk' = = Y jkk'
v y
(10)
y que es el nuevo sistema de ecuaciones a resolver
para obtener el Flujo Óptico.
Una vez resuelto el problema de la apertura de la
ecuación del flujo óptico (6), se presenta el problema
de resolver, en un tiempo aceptable para un sistema
en tiempo real, la transformada Wavelets y las
derivadas que supone la solución adoptada (9).
Para resolver la transformada Wavelet se usa la
Transformada Rápida Wavelet [8].
3
EXPERIMENTOS
A continuación se muestran algunos de los resultados
que se obtienes al procesar diversas secuencias
aplicando el procedimiento de la sección 2.
La secuencia que se muestra en la Figura 1 esta
tomada por las torres de vigilancia del sistema
BOSQUE (IZAR-BAZAN). La secuencia mostrada
está digitalizada con una periodicidad de 1 seg. Los
Figura 2 Procesamiento de una secuencia en entorno
forestal tomada del proyecto europeo SPREAD.
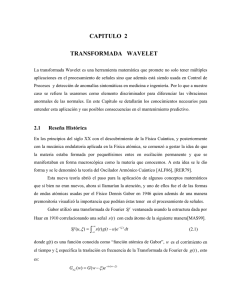
Los experimentos que se muestran en Fig. 3 y Fig. 4
corresponden al procesado de secuencias tomadas
desde el posicionador del que se dispone en el
Instituto Andaluz de Automática y Robótica. En
estos experimentos la secuencia esta digitalizada con
un una periodicidad de 0.5 seg.
realización de algunos experimentos y al Instituto
Andaluz de Automática y Robótica por permitir
probar este procedimiento haciendo uso de sus
instalaciones.
Referencias
Figura 3 Procesamiento de una primera secuencia en
entorno urbano.
Figura 4 Procesamiento de una segunda secuencia en
entono urbano
Como puede observarse el sistema responde bien,
aún en entornos en los que existen multitud de
objetos en movimiento, como podría ser un entorno
urbano.
4
CONCLUSIONES
Se he presentado un método de procesamiento digital
de imágenes para la detección de columnas de humo,
utilizando técnicas de Wavelet y técnicas de cómputo
de Flujo Óptico. Se ha probado la utilidad del método
en diversas situaciones algunas de las cuales han sido
expuestas en este artículo.
Agradecimientos
Los autores quieren agradecer a la Comisión Europea
(DG XXII) a través del SPREAD “Forest Fire Spread
Prevention and Mitigation” (EVG-CT-2001-00043)
por dar el soporte necesario para le realización de
este proyecto.
Los autores quieren agradecer al Prof. Domingos X.
Viegas y a los miembros de ADAI de la universidad
de Coimbra (Portugal) por su ayuda para la
[1] Beauchemin, S. S. and Barron, J. L. (1995).
“The Computation of Optical Flow.” ACM
Computing Surveys.
[2] Bernard, Christophe P. (1999). “Discrete
Wavelet Analysis for Fast Optic Flow
Computation”.
[3] Bjorn Jawerth, Wim Sweldens. “An Overview
of Wavelet Based Multiresolution analices”
[4] Graps, Amara. (1995). “An Introduction to
Wavelets”. IEEE Computational Science and
Engineering, vol. 2, num. 2.
[5] Jack K. Cohen and Tong Chen (1993).
“Fundamentals of the Discrete Wavelet
transform for seismic data processing”.
[6] Kruglinski D. (1999). “Programación avanzada
en Microsoft Visual C++ 5.0”. Mc Graw Hill
Microsoft Press.
[7] Leena Maija Reissel. (1995) “Multiresolution
and wavelets”. Siggraph 95 Course Notes.
[8] Mallat, Stephane G. (1989) “A Theory for
Multiresolution Signal Descomposition: The
Wavelet Representation”. IEEE transactions on
pattern analysis and machine intelligence, vol.
11, No. 7.
[9] Mallat, Stephane G. (1996) “Wavelet for a
vision”. Processing of the IEEE, vol. 84, No. 4.
[10] Pajares G. y De la Cruz Jesús M. (2001).
“Visión por computador. Imágenes digitales y
aplicaciones” Ra-Ma.
[11] Russ, J. C. (1995). “The Image Processing
Handbook”, CRC Press, IEEE Press, Boca
Raton.
[12] Sozou, P.D. and Loizou. “New Perspectives on
Optical Flow”.
[13] Supot Nitsuwat. “Optical Flow Estimation”.
[14] Woods, J. W. and O’Neil, S.D. (1986).
“Subband coding of images”. IEEE Trans.
Acustic, Speech Signal Proccssing, 34(5), 12781288.