Implementación de un sistema motriz con alambres musculares y
Anuncio

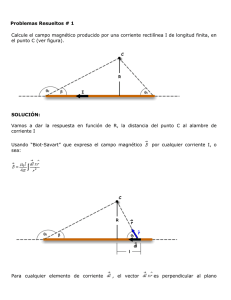
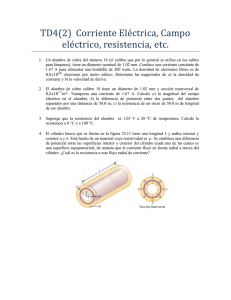
Implementación de un sistema motriz con alambres musculares y controlado con un microcontrolador Atmega16 J. R. Martínez y Cárdenas1, F. Diego Nava1, T. B. Claris Soriano2, I. A. Murcio González2 1 Departamento de Ingeniería de Prototipos, CIIDIR-IPN, Oaxaca Departamento de Ingeniería Electrónica, Instituto Tecnológico de Oaxaca Teléfono (951) 51-70400 ext. 82739 Fax (951) 51-70400 E-mail: rodolfo_mc@yahoo.com 2 Resumen –– Actualmente se siguen buscando nuevas tecnologías para el desarrollo de mecanismos y entre estas nuevas tecnologías se encuentran los alambres musculares construidos con una aleación llamada Flexinol. En este documento se aborda el tema, en especial el de la construcción de un sistema motriz con seis actuadores con dos grados de libertad cada uno. Para el control armónico de este conjunto de patas se utilizó un microcontrolador Atmega 16. Palabras Clave – alambres musculares, vida artificial, microcontrolador Atmega16. I. INTRODUCCIÓN A lo largo de la historia de la humanidad, el hombre ha tenido la necesidad propia de crear sistemas para la labranza, y se ha dado a la tarea de empezar ha recrear los sistemas motrices de las especies vivientes que lo rodean. Dentro del desarrollo de sistemas motrices se cuenta hoy en día con una aleación especial que puede simular un músculo biológico. Una de las características físicas del alambre muscular es que actúa de acuerdo al calor. Pues con este cambia su forma, ya que al pasar una corriente eléctrica por el alambre muscular genera un calor lo que hace que el alambre se contraiga, generando así una fuerza, al enfriarse este se elonga y vuelve de nuevo a su tamaño original, la mayoría de manera unitaria generar una pequeña fuerza pero en conjunto especulamos que pueden llegar a generar una fuerza mecánica considerable. agua caliente el alambre rápidamente se bate a sí mismo de vuelta a su forma original. Es interesante observar a este alambre casi mágicamente desplegarse y desenrollarse a sí mismo de vuelta a su forma inicial. La fuerza generada cuándo el alambre revierte su forma es sorprendentemente fuerte. Una pulgada cuadrada de material Nitinol genera una fuerza de retorno aproximadamente + 30,000 PSI. Otra propiedad interesante de SMA se llama el efecto de memoria (SME por sus siglas en ingles Shaped Memory Effect). La aleación puede trabajarse dándole una forma específica. Una vez que una forma ha sido especificada, la aleación puede ser tratada de manera adversa cambiando de forma. Pero esta volverá a su forma original calentando la aleación, al elevar la temperatura de transición. Esta propiedad SME está usada en un elemento llamado Livewire, ver Figura 1. F Figura 1.- Fotografía de un tramo de Liveware o nitinol Aunque la aleación de níquel con titanio da el Nitinol un cambio menor en la proporción de los dos compuestos tiene un efecto dramático en la temperatura de transición de la aleación resultante. Por ejemplo, una diferencia 1 % en la proporción de los metales puede hacer variar la temperatura de transición de - 100 a + 100 0C. II. METODOLOGÍA De una manera análoga a los músculos se ha desarrollado el alambre muscular, basado en las mismas características, esta aleación funciona también eléctricamente, cuando una corriente circula a través de este se encoge generando una fuerza de contracción. A este tipo de materiales se les denomina de memoria, por su complejidad de regresar a una forma predeterminada. El Nitinol, se contrae estando caliente, lo cual es el opuesto de lo que hacen los metales estándar, los cuales cuándo mas calientes se encuentran más se dilatan. Este tipo de elemento se puede doblar, el Nitinol puede adoptar alguna forma, pero al sumergirlo en un recipiente de Figura 2.- Fuerza aplicada al Nitinol Cada compañía que confecciona sus productos de Nitinol, debe sostener la proporción de los componentes para mantener un nivel preciso, ya que esto garantiza una temperatura estable y repetible de transición. La aleación del Nitinol estándar tiene una temperatura de transición de 700C (158F). El alambre Nitinol usualmente tiene una contra fuerza aplicada en el sentido inverso de su contracción. La fuerza objeto que realiza la fuerza, estira el alambre de regreso a su largo original cuándo esta en la fase de baja temperatura. Ésta es llamada la fuerza diagonal. Si el alambre del Nitinol es traído para su temperatura de transición sin una fuerza diagonal, entonces se contraerá, cuándo se enfría se deformará de acuerdo a la fuerza aplicada, ver Figura 2. El alambre Nitinol puede ser activado usando directamente un suministro de fuerza de corriente eléctrica de bajo voltaje (6-12volts). Un circuito sencillo puede estar construido usando una batería, un interruptor y un alambre de Nitinol. Se puede ver en la siguiente Figura 3 la forma de activar un alambre Nitinol usando una corriente continua CD, así como el símbolo de representación de dicho elemento. Esto es importante debido que se debe de tener cuidado con la corriente subministrada al alambre. Ya que exponiéndolo a un periodo prolongado de tiempo el calentamiento generado en el alambre Nitinol irá degradando sus propiedades con el tiempo. Existen muchas maneras de hacer que el alambre se contraiga y se expanda para ello se dispone de una variedad de circuitos dependiendo de la aplicación que sea requerida. Mientras el alambre puede cambiar de largo, el volumen absoluto de Nitinol será constante. Figura 3.- Circuito eléctrico para activar al Nitinol. La contracción y la relajación dependen solamente de la temperatura del alambre de la aleación del Nitinol. Se puede usar cualquier método para calentar y enfriar el alambre. El alambre Nitinol tiene una resistencia eléctrica alta, resistencia de aproximadamente 1.25 Ω por pulgada para un alambre de 6 milésimas. La resistencia del alambre a la corriente eléctrica rápidamente genera suficiente calor (la calefacción óhmica) al conducir el alambre a través de su temperatura de transición. En el proyecto se usó principalmente el alambre de Nitinol de 4 milésimas, ya que fue el que más se acomodó para el armado de las patas. En la Figura 3 se observa los extremos del resorte que son el soporte sobre el cual se apoya el alambre Nitinol, para esto el resorte no deberá de tener una fuerza de resistencia demasiado grande, ya que de lo contrario el alambre no se contraerá si la fuerza es mayor a la que puede generar. Pero deberá estar lo suficientemente tenso para que este se contraiga. III. RESULTADOS El sistema de locomoción esta basado en un sistema de 2 grados de libertad, esto quiere decir que puede tener dos movimientos libres, y por lo tanto puede tener un avance hacia adelante y cambiar de dirección. Todos los movimientos armónicos son controlados por el microprocesador, ver Figura 4. Figura 4.- Sistema de locomoción del sistema con dos grados de libertad cada pata. Una de las partes mas importantes son los actuadotes (patas) del sistema, ya que es el sistema de soporte y locomoción; es de vital importancia ubicar la manera correcta de ponerlas en el esqueleto del mismo. Así que veamos a detalle el ensamblaje de las patas. Así como los puntos donde se conseguirá más presión y por lo tanto donde estará unido el alambre. En este sistema se consideraron tan sólo 6 patas para el desempeño motriz. El sistema de locomoción posee dos grados de libertad y esta determinado por dos alambres musculares sujetados a cada pata. Los pasos de manera detallada y precisa se muestran en la Figura 5 que se muestra a continuación, en donde se describe paso por paso las etapas de construcción del sistema. con una fuente de 3 volts de corriente directa, ver Figura 7. Esta tecnología del Flexinol se esta empesando a utilizar en la línea de investigación de robótica y vida artificial con el nombre de BEAM´s (acrónimo: Biología, Electrónica, Estética y Mecánica), los cuales son sistemas analógicos. Sin embargo el que aquí presentamos se escapa de esta idea inicial, y hacemos que se involucre tanto en el campo analógico como digital. El modelo propuesto esta basado en la movilidad y disposición de adaptabilidad de un insecto, esto a razón de que son animales adaptables al terreno y su medio. Figura 5.- Diferentes pasos de montaje de las patas. En la Figura 6 se muestra la ubicación del montaje dentro del soporte. Este proyecto requerirá de una fuerza mínima del FLEXINOL. La fuerza requerida está directamente relacionada al área transversal o más apropiadamente al diámetro del alambre, así que en este caso se ocupó un alambre muscular con un diámetro de 0.004 milésimas. Figura 6.- Ubicación del montaje dentro del soporte. A cada uno de los extremos de cada uno de los segmentos del alambre de FLEXINOL se les colocó un conector sujetador y el otro extremo de cada uno de ellos se alimentó Figura 7.- Fotografía del prototipo. EL MICROPROCESADOR ATMEGA 16 El ATmega16 es un microcontrolador de 8 bits y de bajo consumo de potencia, basado en la arquitectura AVR RISC, capaz de ejecutar un millón de instrucciones por segundo, posee bajo consumo de potencia contra velocidad de procesamiento. El punto principal del AVR es la combinación de un conjunto de instrucciones con 32 registros de propósito general. Los 32 registros están directamente conectados a la unidad lógica aritmética (ALU) permitiendo acceder a dos registros independientes con una sola instrucción en un ciclo de tiempo. Esta arquitectura es muy eficiente. Es hasta diez veces más rápido que los microcontroladores CISC convencionales. CONCLUSIONES El estudio así como la investigación del alambre muscular, es de gran importancia, pues puede llegarse a convertir en una gran herramienta mecánica dentro de la robótica. La importancia de este elemento radica en sus posibles aplicaciones en el ramo de la mecánica, como se observa posee gran similitud con los músculos del cuerpo humano. Se infiere la posibilidad que los alambres musculares al trabajar en forma paralela podrán formar verdaderos músculos con gran potencia de trabajo. Finalmente podemos comentar por otro lado que estos músculos podrán ser gobernados por medio de la inteligencia artificial. REFERENCIAS [1] D Kart Williams, “Insectronics, build your own walking robot; Tab Robotics”, McGraw Hill, 2003, ISBN 0-07-141241-7. [2] Dave Hrynkiw, Mark W. Tilden, “Junbots, Bugbots & Bots on Wheels, Building simple robots with BEAM technology”, Osborne, McGraw Hill, 2002, ISBN 007-222601-3