Geometría Proyectiva - Facultad de Ciencias Matemáticas
Anuncio

Apuntes de
Geometrı́a Proyectiva
por Enrique Arrondo(*)
Versión del 7 de Enero de 2009
Versión muy preliminar
EL PLANO PROYECTIVO
1. Construcción del plano proyectivo
2. Rectas del plano proyectivo
3. Razón doble
4. Cónicas proyectivas
5. Cónicas afines y euclı́deas
ESPACIOS PROYECTIVOS
6. Construcción del espacio proyectivo
7. Aplicaciones proyectivas
8. Clasificación de proyectividades
9. Correlaciones y cuádricas
10. Espacio afı́n y espacio proyectivo
(*) Departamento de Álgebra, Facultad de Ciencias Matemáticas, Universidad Complutense de Madrid, 28040 Madrid, Spain, arrondo@mat.ucm.es
1
EL PLANO PROYECTIVO
1. Construcción del plano proyectivo
Nuestro punto de partida consiste en observar que existe una cierta simetrı́a entre
el conjunto de puntos y el conjunto de rectas del plano afı́n A2k sobre un cuerpo k. En
efecto, dados dos puntos distintos de A2k , se puede determinar a partir de ellos una recta,
concretamente la única que pasa por ellos dos; recı́procamente, dadas dos rectas distintas
del plano, determinan un único punto, en concreto el de intersección de ambas (salvo que
sean paralelas, problema que obviaremos de momento). Esta simetrı́a nos puede hacer
sospechar que ambos conjuntos tienen la misma estructura, ası́ que vamos a analizar si
esto es cierto.
En primer lugar, el conjunto de puntos de Ak2 se identifica inmediatamente con k 2 ,
pero describir el conjunto de rectas parece más complicado. Para simplificarlo, y hacer
que tal conjunto sea otro k 2 , podemos representar cada recta por medio de una ecuación
de la forma Y = aX + b, con a, b ∈ k. En otras palabras, estamos determinando cada
recta a partir de un par (a, b), donde a es la pendiente de la recta y (0, b) es su punto de
intersección con el eje vertical. Obsérvese que encontramos un nuevo problema, y es que
esto nos da una biyección no entre k 2 y el conjunto de todas las rectas, sino sólo entre k 2
y las rectas no verticales (ya que las rectas de la forma X =constante son las únicas que
no se pueden representar con una ecuación de la forma Y = aX + b).
A pesar de estos problemas, veamos si de todas formas encontramos la simetrı́a a la
que aludimos desde el principio. Empecemos por dos puntos distintos (x , y ), (x , y ) ∈ A2k
y determinemos la recta que pasa por ellos. De Álgebra Lineal y Geometrı́a, sabemos que
dicha recta tiene de ecuación
1 X Y 1 x y = 0
1 x y que, escrita de la forma descrita anteriormente, será Y = aX + b, con
(a, b) =
y − y x y − x y ,
.
x − x
x − x
(1.1)
Por otro lado, si consideramos las rectas Y = a X + b y Y = a X + b , su intersección es
el punto
b − b a b − a b (x, y) = − ,
.
(1.2)
a − a
a − a
2
Comparando las dos expresiones (1.1) y (1.2), nos damos cuenta de que, salvo por un
signo, los pares de la forma (a, b) juegan un papel simétrico al de los pares de la forma
(x, y), lo que no deberı́a ser por casualidad. La clave nos la va a dar el mirar los casos
“patológicos”. Si miramos la fórmula (1.2), nos damos cuenta de que no tiene sentido si
a = a . Hasta aquı́ es normal, visto que a = a quiere decir que las dos rectas tienen la
misma pendiente, es decir, son paralelas, con lo que evidentemente no nos podı́a salir un
punto de intersección.
Mirando ahora el caso simétrico, la fórmula (1.1) no está definida cuando x = x ,
lo que también es normal, porque en tal caso la recta que pasa por los dos puntos es una
recta vertical, que no se puede poner de la forma Y = aX + b. La idea es que, dado que
en este último caso sabemos que sı́ que hay recta, vamos a ampliar el conjunto de pares de
la forma (a, b) al conjunto de todas las rectas de A2k , y por simetrı́a ampliaremos también
el conjunto de puntos de A2k .
En realidad, el conjunto de todas las rectas vendrá dado por el conjunto de todas las
ecuaciones de la forma u0 + u1 X + u2 Y = 0 (con u0 , u1 , u2 ∈ k), teniendo en cuenta dos
observaciones:
1) Necesariamente al menos uno de los coeficientes u1 , u2 es distinto de cero (de hecho,
hasta ahora estábamos considerando sólo rectas con u2 = 0, es decir, rectas no verticales).
2) Una recta tiene infinitas ecuaciones. Más precisamente, las ecuaciones u0 + u1 X +
u2 Y = 0 y u0 + u1 X + u2 Y = 0 definen la misma recta si y sólo si los coeficientes son
proporcionales, es decir, existe λ ∈ k tal que (u0 , u1 , u2 ) = λ(u0 , u1 , u2 ) (obsérvese que,
necesariamente, λ = 0).
Para indicar que los coeficientes están definidos salvo proporcionalidad escribiremos
(u0 : u1 : u2 ). Con esta notación, una recta dada por las coordenadas (a, b) es la recta de
coeficientes (a : b : −1) la fórmula (1.1) queda entonces
(u0 : u1 : u2 ) =
y − y x y − x y :
:
−1
= (y − y : x y − x y : x − x )
x − x
x − x
que ahora es una recta que existe siempre (ya que o la primera o la tercera coordenadas
son distintas de cero cuando los dos puntos son distintos).
Podemos intentar lo mismo ahora con los puntos en lugar de las rectas, es decir, añadir
una nueva coordenada y seguir definiendo ternas salvo multiplicidad. Obsérvese primero
que la ecuación u0 + u1 X + u2 Y = 0 sugiere una anulación sobre la terna (1, X, Y ), con lo
que lo razonable es añadir la nueva coordenada al principio. En definitiva, identificamos
un punto (x, y) ∈ A2k con la terna (1 : x : y), con lo que la fórmula (1.2) queda
b − b a b − a b :
= (a − a : b − b : a b − a b ).
(1 : x : y) = 1 : − a −a
a −a
3
De ese modo, la terna de la derecha está siempre definida, aunque no corresponderá a un
punto de A2k si a = a , es decir, cuando las rectas son paralelas. En otras palabras, parece
que hemos aumentado el plano suficientemente para que dos rectas se corten siempre. Esto
motiva la siguiente:
Definición. Llamaremos plano proyectivo sobre el cuerpo k, y lo denotaremos con
conjunto de ternas (x0 : x1 : x2 ) con x0 , x1 , x2 ∈ k no todos nulos y de forma que
P2k , al
(x0 : x1 : x2 ) = (x0 : x1 : x2 ) ⇔ ∃λ ∈ k tal que (x0 , x1 , x2 ) = λ(x0 , x1 , x2 ).
Observación 1.3. Es muy importante observar inmediatamente que no tiene sentido
sumar puntos en el plano proyectivo. Por ejemplo, ¿qué querrı́a decir la suma de los
puntos (1 : 0 : 0) y (0 : 1 : 0)? Una respuesta apresurada nos dirı́a que la suma es el punto
(1 : 1 : 0), pero esto no es ası́. No hay que olvidar que los elementos del plano proyectivo
en realidad son clases de equivalencia, y por tanto una definición es consistente sólo si
no depende del representante elegido. Por ejemplo, por la definición de plano proyectivo,
tenemos que el punto (1 : 0 : 0) coincide con el punto (2 : 0 : 0), mientras que el punto
(0 : 1 : 0) coincide con el punto (0 : −3 : 0), y con estos representantes parecerı́a lógico
decir que la suma de (2 : 0 : 0) y (0 : −3 : 0) es (2 : −3 : 0), que no es igual al punto
(1 : 1 : 0).
Proposición 1.4. La aplicación
i : A2k
→
P2k
(x, y) → (1 : x : y)
es inyectiva y define una biyección entre
inversa es (x0 : x1 : x2 ) → ( xx10 , xx20 ).
A2k y U0 := {(x0 : x1 : x2 ) ∈ P2k
| x0 = 0} cuya
Demostración: Obsérvese en primer lugar que el subconjunto U0 está bien definido, ya
que si (x0 : x1 : x2 ) = (x0 : x1 : x2 ), es equivalente x0 = 0 a x0 = 0, puesto que x0 = λx0
para algún λ = 0.
Claramente i es inyectiva, ya que si (1 : x : y ) = (1 : x : y ), existe λ ∈ k tal que
(1, x : y ) = λ(1, x , y ) , con lo que necesariamente λ = 1 y (x , y ) = (x , y ).
Por otra parte, es claro que la imagen de i está contenida en U0 . Recı́procamente,
dado cualquier elemento (x0 : x1 : x2 ) ∈ U0 , como x0 = 0 podemos escribir (x0 : x1 : x2 ) =
(1 : xx10 : xx20 ), y por tanto (x0 : x1 : x2 ) es la imagen de ( xx10 , xx20 ).
Definición. A raı́z de la inclusión anterior, consideraremos siempre el espacio afı́n
como el subconjuto U0 del plano proyectivo P2k . Los elementos de P2k que no están en
los llamaremos puntos del infinito del plano afı́n A2k .
4
A2k
A2k
Proposición 1.5. Sea L ⊂ A2k la recta de ecuación u0 + u1 X + u2 Y = 0. Entonces, si
(v1 , v2 ) es un vector director de L, el conjunto L̄ := L ∪ {(0 : v1 : v2 )} ⊂ P2k tiene como
ecuación u0 X0 + u1 X1 + u2 X2 = 0.
Demostración: Los vectores directores de L son de la forma (v1 , v2 ) = λ(u2 , −u1 ), con lo
que el punto (0 : v1 : v2 ) está unı́vocamente determinado, y es inmediato que verifica la
ecuación u0 X0 +u1 X1 +u2 X2 = 0. Por otra parte, es claro que un punto (x, y) ∈ L, cuando
se identifica con el punto (1 : x : y) ∈ P2k , verifica la ecuación u0 X0 + u1 X1 + u2 X2 = 0.
Recı́procamente, dado (x0 : x1 : x2 ) ∈
ocurrir dos cosas:
P2k
tal que u0 x0 + u1 x1 + u2 x2 = 0, pueden
1) Si x0 = 0, entonces (x0 : x1 : x2 ) se puede ver como el punto ( xx10 , xx20 ) de
además se tiene u0 + u1 xx10 + u2 xx20 = 0, con lo que ( xx10 , xx20 ) está en L.
A2k , y
2) Si x0 = 0, entonces de la ecuación u0 x0 +u1 x1 +u2 x2 = 0 se deduce inmediatamente
(x0 : x1 : x2 ) = (0 : u2 : −u1 ).
Definición. Llamaremos completado proyectivo de la recta L al conjunto L̄, y punto del
infinito de la recta L al punto (0 : v1 : v2 ).
El resultado anterior nos dice entonces que los puntos del planos proyectivo son de
dos tipos:
1) Puntos con x0 = 0, es decir, puntos de
A2k .
2) Puntos de la forma (0 : v1 : v2 ), con (v1 , v2 ) = (0, 0), que son entonces puntos del
infinito de rectas, es decir, que se pueden interpretar como direcciones del plano afı́n.
Nótese que, en la ecuación del completado proyectivo de una recta todos los sumandos
tienen grado uno, y que no hay término independiente. La definición general es la siguiente.
Definición. Se llama polinomio homogéneo (de grado d) en k[X0 , . . . , Xn ] a un polinomio
F que tiene todos sus sumandos de grado d. Claramente se verifica que F (λX0 , . . . , λXn ) =
λd F (X0 , . . . , Xn ) (y de hecho, esta propiedad caracteriza a los polinomios homogéneos).
Observación 1.6. Los polinomios homogéneos en k[X0 , X1 , X2 ] son los que sirven para
dar ecuaciones en el plano proyectivo, teniendo en cuenta lo siguiente:
1) Un polinomio no homogéneo no puede nunca definir una ecuación. Por
ejemplo, no tiene sentido hablar de la ecuación X0 + X2 − 1 = 0. Uno podrı́a pensar que el
punto (1 : 0 : 0) verifica la ecuación, pero sin embargo el mismo punto lo podemos escribir
como (2 : 0 : 0) y ya no verifica la ecuación.
2) Sı́ que tiene sentido hablar de la ecuación definida por un polinomio homogéneo
F ∈ k[X0 , X1 , X2 ] (por ejemplo, la ecuación X0 = 0 que hemos usado en la Proposición
5
1.4 o en general la ecuación de una recta). En efecto, si dado un punto (x0 : x1 : x2 ) se
tiene que F (x0 , x1 , x2 ) = 0, entonces para cualquier otra representación (λx0 : λx1 : λx2 )
del mismo punto se tendrá también F (λx0 , λx1 , λx2 ) = λd F (x0 , x1 , x2 ) = 0. Por tanto, la
anulación de un polinomio en un punto no depende del representante que tomemos.
3) Lo que no tiene sentido es decir cuánto vale un polinomio en un punto cuando no
se anula. Por ejemplo, no se puede decir que el polinomio X0 − X1 + X2 valga 1 en el
punto (1 : 1 : 1), ya que cambiando el representante a (−3 : −3 : −3) su valor serı́a −3.
Ejemplo 1.7. Veamos en ejemplos concretos cómo se generaliza el completado proyectivo
de las rectas a otras curvas planas.
1) Consideramos la parábola Y − X 2 = 0. Entonces, un punto (x0 : x1 : x2 ) ∈ U0
estará en la parábola si y sólo si xx20 − ( xx10 )2 = 0. Quitando denominadores (es decir,
multiplicando por x20 ) nos queda la relación x0 x2 − x21 = 0. Como en la demostración de la
Proposición 1.5, los únicos puntos de U0 que verifican la ecuación X0 X2 − X12 = 0 son los
de la parábola. En cambio, los puntos del infinito que verifican también X0 X2 − X12 = 0
deben verificar por tanto X0 = X12 = 0, con lo que sólo hay un punto en el infinito, en
concreto (0 : 0 : 1), es decir, el punto que corresponde a la dirección vertical.
2) Si consideramos la hipérbola XY − 1 = 0, repitiendo el mismo proceso nos quedarı́a
la ecuación X1 X2 −X02 = 0, cuya intersección con la recta del infinito nos da X0 = X1 X2 =
0. Tenemos por tanto en este caso dos puntos en el infinito, (0 : 0 : 1) y (0 : 1 : 0), que
corresponden a las direcciones vertical y horizontal de las ası́ntotas.
En general, se tiene lo siguiente:
Definición. Dado un polinomio f ∈ k[X, Y ] de grado d, se llama completado proyectivo
de la curva definida por f = 0 al conjunto de puntos que se anulan en el polinomio
1 X2
F (X0 , X1 , X2 ) := X0d f ( X
X0 , X0 ). El polinomio F se llama el homogeneizado de f , y consiste
en cambiar en cada sumando de f la variable X por X1 , la variable Y por X2 y multiplicar
por X0 elevado a d menos el grado del monomio. Los puntos de F = 0 que están la recta
del infinito se llaman puntos del infinito de la curva.
Definición. Se llama curva proyectiva de grado d al subconjunto de los puntos de P2k que
se anulan en un polinomio homogéneo de grado d en k[X0 , X1 , X2 ]. Si d = 1, la curva se
llama recta proyectiva, mientras que si d = 2 la curva se llama cónica proyectiva.
Observación 1.8. definido por una ecuación del tipo u0 X0 + u1 X1 + u2 X2 = 0, con
algún ui = 0. Por la Proposición 1.5, todas las rectas proyectivas son completados de una
recta, excepto la recta X0 = 0, que consiste en el conjunto de los puntos del infinito de
A2k , y que llamaremos recta del infinito.
6
Veamos que con esta construcción ya tenemos la simetrı́a que buscábamos. En primer
lugar, dados dos puntos distintos, determinan siempre una recta. En efecto:
1) Si los dos puntos están en A2k , entonces la única recta que los contiene es el completado proyectivo de la recta afı́n que pasa por ellos.
2) Si uno de los puntos está en A2k y el otro en la recta del infinito, entonces este
segundo punto representa una dirección, y por tanto hay una única recta afı́n que pasa por
el primer punto en la dirección representada por el segundo punto. La recta proyectiva
buscada es el completado proyectivo de esta recta afı́n.
3) Si los dos puntos están en el infinito, la única recta que pasa por ellos es la recta
del infinito.
Simétricamente, veamos que la intersección de dos rectas proyectivas es siempre un
punto:
1) Si las dos rectas son completados proyectivos de rectas afines no paralelas, su único
punto de intersección es el de las correspondientes rectas afines.
2) Si las dos rectas son completados proyectivos de rectas afines paralelas, su único
punto de intersección es el punto del infinito que corresponde a la dirección de las dos
rectas afines.
3) Si una de las rectas es la recta del infinito, el único punto de intersección es el punto
del infinito de la otra recta (que necesariamente es el completado proyectivo de una recta
afı́n).
Puede pensarse, y con razón, que la anterior comprobación es excesivamente pesada. Y
en efecto, tiene todo el sabor de los resultados de geometrı́a afı́n en que hay que distinguir
entre numerosos casos. De hecho, el plano proyectivo no hay que verlo sólo como una
completación del plano afı́n (aunque esto ayude mucho a visualizarlo). Debe verse, sobre
todo, como un espacio geométrico con interés en sı́ mismo. De hecho, ası́ es como lo vamos
a considerar nosotros (sólo cuando lo hayamos estudiado en profundidad volveremos a
relacionarlo con el plano afı́n, pero con el fin de obtener a partir de él propiedades del
plano afı́n, y no al revés).
Reescribamos pues la simetrı́a anterior sin usar el plano afı́n. La primera primera
observación es que el conjunto de rectas proyectivas forma también un plano proyectivo.
En efecto, dos ecuaciones u0 X0 + u1 X1 + u2 X2 = 0 y u0 X0 + u1 X1 + u2 X2 = 0 definen la
misma recta si y sólo si existe λ ∈ k \ {0} tal que (u0 , u1 , u2 ) = (u0 , u1 , u2 )λ. Por tanto,
podemos dar la siguiente definición:
Definición. Llamamos plano proyectivo dual al conjunto de rectas del plano proyectivo.
Es un plano proyectivo en el sentido de que a cada recta u0 X0 + u1 X1 + u2 X2 = 0 le
asociamos el punto (u0 : u1 : u2 ). Para distinguirlo del plano proyectivo lo denotamos con
7
P2k ∗ , y sus variables las llamaremos U0 , U1 , U2 .
El primer signo de la simetrı́a que tenemos (que a partir de ahora llamaremos dualidad)
∗
∗
es que no sólo los puntos de P2k son rectas de P2k , sino que también las rectas de P2k son
puntos en P2k :
Proposición 1.9. Toda recta en P2k consiste en el conjunto de rectas de P2k que pasan
por un punto fijo (lo que se llama haz de rectas con base el punto). Recı́procamente todo
∗
haz de rectas en P2k representa una recta en P2k .
∗
Demostración: Es inmediato, ya que la ecuación de una recta en P2k es de la forma
∗
a0 U0 + a1 U1 + a2 U2 = 0. Pero que un punto de P2k de coordenadas (u0 : u1 : u2 ) satisfaga
esa ecuación quiere decir que la recta de P2k de ecuación u0 X0 + u1 X1 + u2 X2 = 0 pase
por el punto (a0 : a1 : a2 ) de P2k .
∗
Veamos ahora cómo aplicar la dualidad.
: x1 : x2 ), (x0 : x1 : x2 ) de P2k , la única
ecuación
X0 X1
x0 x1
x0 x1
(x0
En primer lugar, dados dos puntos distintos
recta de P2k que pasa por ellos tendrá como
X2 x2 = 0
x2 (1.10)
x0 x1 x0 x2 (claramente representa una recta, ya que al menos uno de los menores , ,
x
x
x
x
0
1
0
2
x1 x2 x1 x2 es distinto de cero, porque (x0 : x1 : x2 ) = (x0 : x1 : x2 ); además, es claro que
la recta pasa por los dos puntos).
Simétricamente, consideramos dos rectas distintas de P2k de ecuaciones u0 X0 + u1 X1 +
u2 X2 = 0 y u0 X0 + u1 X1 + u2 X2 = 0. Si (a0 : a1 : a2 ) es el punto de intersección de ambas
rectas, eso quiere decir que las dos rectas pertenecen al haz de rectas con base (a0 : a1 : a2 ).
∗
∗
Pasando entonces a P2k , estamos buscando la recta a0 U0 + a1 U1 + a2 U2 = 0 de P2k que
contiene a los puntos (u0 : u1 : u2 ), (u0 : u1 : u2 ). Según , (1.10), esa recta será la recta de
ecuación
U0 U1 U2 u0 u1 u2 = 0.
u0 u1 u2 Ejemplo 1.11. Usando el truco de dualidad anterior, si queremos calcular el punto de
intersección de las rectas 2X0 − 3X1 + X2 = 0 y 3X0 + 4X1 − 5X2 = 0 sin resolver el
∗
sistema hacemos lo siguiente. Las rectas representan los puntos de P2k de coordenadas
8
(2 : −3 : 1) y (3 : 4 : −5). La recta de
U0
2
3
U1
−3
4
P2k ∗ que pasa por ellos tiene de ecuación
U2 1 = 11U0 + 13U1 + 17U2 = 0,
−5 con lo que el punto de intersección de las rectas dadas es (11 : 13 : 17).
9
2. Rectas del plano proyectivo
Empezamos con lo que serı́a el análogo de ecuaciones paramétricas de una recta:
Proposición 2.1. Sea L la recta proyectiva determinada por los puntos (x0 : x1 : x2 ) y
(x0 : x1 : x2 ). Entonces un punto (x0 : x1 : x2 ) está en L si y sólo si existen λ, µ ∈ k (no
ambos nulos) tales que
x0 = λx0 + µx0
x1 = λx1 + µx1
(2.2)
x2 = λx2 + µx2
Además, (λx0 + µx0 : λx1 + µx1 : λx2 + µx2 ) = (λ x0 + µ x0 : λ x1 + µ x1 : λ x2 + µ x2 )
si y sólo si existe ν ∈ k \ {0} tal que (λ , µ ) = (νλ, νµ).
Demostración: La fórmula (1.10) nos dice que (x0 : x1 : x2 ) ∈ P2k es un punto de la recta L
si y sólo si los vectores (x0 , x1 , x2 ), (x0 , x1 , x2 ), (x0 , x1 , x2 ) son linealmente dependientes.
Como los dos últimos son linealmente independientes (por ser los puntos (x0 : x1 : x2 )
y (x0 : x1 : x2 ) distintos), se tiene que (x0 , x1 , x2 ) depende linealmente de (x0 , x1 , x2 ) y
(x0 , x1 , x2 ), es decir, que existen λ, µ ∈ k tales que
(x0 , x1 , x2 ) = λ(x0 , x1 , x2 ) + µ(x0 , x1 , x2 )
(además (λ, µ) = (0, 0), porque (x0 , x1 , x2 ) = (0, 0, 0)). Esto prueba la igualdad (2.2).
Por otra parte, la igualdad
(λx0 + µx0 : λx1 + µx1 : λx2 + µx2 ) = (λ x0 + µ x0 : λ x1 + µ x1 : λ x2 + µ x2 )
es equivalente a decir que existe ν ∈ k tal que
(λ x0 + µ x0 , λ x1 + µ x1 , λ x2 + µ x2 ) = ν(λx0 + µx0 , λx1 + µx1 , λx2 + µx2 )
es decir
λ (x0 , x1 , x2 ) + µ (x0 , x1 , x2 ) = ν λ(x0 , x1 , x2 ) + µ(x0 , x1 , x2 )
o lo que es lo mismo
(λ − νλ)(x0 , x1 , x2 ) = (−µ + νµ)(x0 , x1 , x2 ) = (0, 0, 0).
Como (x0 , x1 , x2 ) y (x0 , x1 , x2 ) no son proporcionales, se obtiene λ − νλ = −µ + νµ = 0,
es decir (λ , µ ) = (νλ, νµ).
Observación 2.3. La Proposición 2.1 indica que toda recta proyectiva está en biyección
con el conjunto de pares (λ, µ) = (0, 0) en que identificamos dos de ellos si y sólo si son
10
proporcionales. Es natural por tanto, en analogı́a con la definición de plano proyectivo,
definir el conjunto P1k de pares (λ : µ) definidos salvo proporcionalidad (por analogı́a con
P2k , usaremos mejor coordenadas (t0 : t1 )). Este conjunto se debe interpretar como una
especie de recta proyectiva “abstracta”. La Proposición 2.1 está diciendo que tenemos una
biyección
P1k → L
(2.4)
(t0 : t1 ) → (x0 t0 + x0 t1 : x1 t0 + x1 t1 : x2 t0 + x2 t1 )
que es el análogo de las ecuaciones paramétricas de una recta afı́n (en el caso afı́n hay un
solo parámetro, que varı́a en el cuerpo k, es decir en A1k , la recta afı́n “abstracta”).
Definición. Una biyección como (2.4) la llamaremos parametrización de la recta L.
Lema 2.5. Dados a0 , a1 , a2 , b0 , b1 , b2 ∈ k, son equivalentes:
(i) (t0 : t1 ) → (a0 t0 + b0 t1 : a1 t0 + b1 t1 : a2 t0 + b2 t1 ) es una parametrización de una recta.
(ii) (t0 : t1 ) → (a0 t0 + b0 t1 : a1 t0 + b1 t1 : a2 t0 + b2 t1 ) está bien definida (i.e. no existe
ningún valor (t0 : t1 ) ∈ P1k tal que (a0 t0 + b0 t1 , a1 t0 + b1 t1 , a2 t0 + b2 t1 ) = (0, 0, 0)).
a0 a1 a2
(iii) La matriz
tenga rango dos.
b0 b1 b2
Demostración:
(i) ⇒ (ii): Es inmediato.
(ii) ⇒ (iii): Si la matriz tuviera rango a lo más uno, entonces se tendrı́a que el punto
(b0 : −a0 ) = (b1 : −a1 ) = (b2 : −a2 ) no tendrı́a imagen.
(iii) ⇒ (iv): Por hipótesis, (a0 : a1 : a2 ) y (b0 : b1 : b2 ) son dos puntos distintos, luego
la Proposicion 2.1 nos dice que (t0 : t1 ) → (a0 t0 + b0 t1 : a1 t0 + b1 t1 : a2 t0 + b2 t1 ) es una
parametrización de la recta que pasa por esos dos puntos.
Observación 2.6. La condición (iii) del lema anterior nos dice cómo calcular la inversa de
) = (a0 t0 + b0 t1 : a1 t0 + b1 t1 : a2 t0 + b2 t1 ). En efecto, si el
una parametrización
(x0 : x1 : x2
a0 a1 a2
es dos, habrá dos columnas que no sean proporcionales,
rango de la matriz
b0 b1 b2
por ejemplo las dos primeras. Esto quiere decir que podemos despejar t0 , t1 en función de
x0 , x1 . Concretamente
(t0 : t1 ) = ( a0
a1
b1
x0 −
b0 b1 a0
a1
b0
x1 : − a0
b0 a1
b1 a1
x0 +
b0 b1 a0
a1
a0
x1 )
b0 b1 o lo que es lo mismo (una de las grandes ventajas del proyectivo es que permite eliminar
denominadores)
(t0 : t1 ) = (b1 x0 − b0 x1 : −a1 x0 + a0 x1 ).
11
Obsérvese que, en general, la inversa consiste en dos formas lineales en x0 , x1 , x2 (en
realidad sólo dos de estas coordenadas, dependiendo de la columnas de la matriz que
tomemos).
Ejemplo 2.7.
guiente:
Supongamos que tenemos una recta afı́n parametrizada de la forma si
X = x + v1 t
Y = y + v2 t
es decir, la recta que pasa por el punto (x, y) con vector director (v1 , v2 ). Su completado
proyectivo será entonces la recta que pasa por los puntos (1 : x : y) y (0 : v1 : v2 ), con lo
que tendremos una parametrización
X 0 = t0
X = xt0 + v1 t1
1
X2 = yt0 + v2 t1
que es una especie de “homogeneización” de la parametrización afı́n. De hecho, teniendo
X2
t1
t1
t1
1
en cuenta que X = X
X0 , Y = X0 , tendremos X = x + v1 t0 , Y = y + v2 t0 , es decir, t = t0 .
Obsérvese que el punto del infinito de la recta corresponde al valor (t0 : t1 ) = (0 : 1), es
decir, al valor “infinito” del parámetro t.
Ejemplo 2.8. La aplicación más importante de las parametrizaciones de rectas es que
permiten calcular su intersección con cualquier curva. Por ejemplo, supongamos que queremos intersecar la cónica X0 X2 − X12 = 0 con la recta que pasa por los puntos (1 : −1 : 3)
y (0 : 1 : −1). Debemos encontrar entonces los valores de (t0 : t1 ) tales que el punto
(t0 : −t0 + t1 : 3t0 − t1 ) esté en la cónica, es decir, t0 (3t0 − t1 ) − (−t0 + t1 )2 = 0, que
operando queda 2t20 + t0 t1 − t21 = 0. Para resolver esta ecuación, observamos que t0 no es
cero (si lo fuera, también lo serı́a t1 , pero no pueden ser ambos nulos, por definición de
P1k ), con lo que nos queda 2 + tt10 − ( tt10 )2 = 0, de donde deducimos que tt10 = 2, −1. Por
tanto, las soluciones en P1k son (t0 : t1 ) = (1 : 2), (1 : −1), que nos dan los puntos de la
recta (1 : 1 : 1), (1 : −2 : 4). Este truco se funciona en general, como vemos en el resultado
siguiente.
Proposición 2.9. Si k es un cuerpo algebraicamente cerrado, todo polinomio homogéneo
F ∈ k[T0 , T1 ] de grado d factoriza en d factores lineales, por lo que tiene d soluciones en
P1k contadas con multiplicidad. En consecencuencia, la intersección de cualquier recta con
una curva de grado d consiste en d puntos (contados con multiplicidad), salvo que la recta
esté contenida en la curva.
Demostración: Sacando T0 factor común tantas veces como sea posible, escribimos
F = T0n−m (a0 T0m + a1 T0m−1 T1 + . . . + am T1m )
12
con am = 0. Como k es algebraicamente cerrado, el polinomio a0 + a1 T + . . . + am T m se
puede escribir como am (T − α1 ) . . . (T − αm ), de donde se sigue
F = am T0n−m (T1 − α1 T0 ) . . . (T1 − αm T0 )
y se anula precisamente en (t0 : t1 ) = (0 : 1) (con multiplicidad n − m) y en cada (1 : αi )
(cada uno contado tantas veces como se repita el factor T1 − αi T0 ).
Por tanto, dada una curva definida por una ecuación G = 0, con G ∈ k[X0 , X1 , X2 ]
homogéneo de grado d, si sustituimos en G la parametrización de una curva, obtendremos
una ecuación homogénea de grado d en t0 , t1 (salvo que la recta esté contenida en la curva,
en cuyo caso tal sustitución es idénticamente nula). Por lo que acabamos de ver, tal
ecuación tendrá d soluciones (contadas con multiplicidad) en P1k , con lo que obtendremos
d puntos de la recta que están también en la curva.
Observación 2.10. Conviene precisar cuanto antes una ambigüedad calculada del enunciado de la Proposicion 2.1. Implı́citamente, se está diciendo que se están fijando representantes de los dos puntos que determinan la recta, y no sólo los puntos. Es decir, que dos
puntos pueden determinar infinitas parametrizaciones distintas. Por ejemplo, si queremos
parametrizar la recta que pasa por (1 : 0 : 1) y (0 : 1 : 1), obtendrı́amos la parametrización
(t0 : t1 ) → (t0 : t1 : t0 + t1 )
pero si escribimos los puntos como (2 : 0 : 2) y (0 : −1 : −1) obtendrı́amos la parametrización
(t0 : t1 ) → (2t0 : −t1 : 2t0 − t1 )
que sólo coincide con la anterior para los valores (t0 : t1 ) = (1 : 0), (0 : 1). El resultado
siguiente nos dice que para tener unicidad nos hace falta un tercer punto.
Teorema 2.11. Sea L una recta proyectiva y (x0 : x1 : x2 ), (x0 : x1 : x2 ), (x
0 : x1 : x2 )
tres puntos distintos de L. Entonces, existe y es única una parametrización de L que
verifique
(1 : 0) → (x0 : x1 : x2 )
(0 : 1) → (x0 : x1 : x2 )
(1 : 1) → (x
0 : x1 : x2 )
Demostración: Veamos en primer lugar que, de existir, la parametrización debe ser única.
Una parametrización genérica tiene el aspecto
(t0 : t1 ) → (a0 t0 + b0 t1 : a1 t0 + b1 t1 : a2 t0 + b2 t1 )
y, de acuerdo con nuestras condiciones, debe verificarse
(a0 : a1 : a2 ) = (x0 : x1 : x2 )
13
(b0 : b1 : b2 ) = (x0 : x1 : x2 )
(a0 + b0 : a1 + b1 : a2 + b2 ) = (x
0 : x1 : x2 )
es decir, que existen λ, µ, ν ∈ k \ {0} tales que
(a0 , a1 , a2 ) = (λx0 , λx1 , λx2 )
(b0 , b1 , b2 ) = (µx0 , µx1 , µx2 )
(a0 + b0 , a1 + b1 , a2 + b2 ) = (νx
0 , νx1 , νx2 ).
De aquı́ se deduce, sumando las dos primeras igualdades,
λ(x0 , x1 , x2 ) + µ(x0 , x1 , x2 ) = ν(x
0 , x1 , x2 ).
Por otra parte, del hecho que (x0 : x1 :
(x
0 : x1 : x2 ), se deduce de (1.10):
x0
x0
x0
x2 ) esté en la recta que pasa por (x0 : x1 : x2 ) y
x1
x1
x
1
x2 x2 = 0
x
2
y por tanto, la última fila es combinación de las dos primeras (que son independientes al
representar puntos distintos). Es decir, existen α, β ∈ k tales que
(x
0 , x1 , x2 ) = α(x0 , x1 , x2 ) + β(x0 , x1 , x2 ).
(2.12)
Substituyendo de aquı́ (x
0 , x1 , x2 ) en la combinación lineal anterior tenemos
λ(x0 , x1 , x2 ) + µ(x0 , x1 , x2 ) = να(x0 , x1 , x2 ) + νβ(x0 , x1 , x2 )
o equivalentemente
(λ − να)(x0 , x1 , x2 ) = (νβ − µ)(x0 , x1 , x2 ).
Como (x0 , x1 , x2 ) y (x0 , x1 , x2 ) no son proporcionales, se sigue que λ = να, µ = νβ, de
donde
(a0 , a1 , a2 ) = (ναx0 , ναx1 , ναx2 )
(b0 , b1 , b2 ) = (νβx0 , νβx1 , νβx2 )
y por tanto la parametrización debe ser
(t0 : t1 ) → (ναx0 t0 + νβx0 t1 : ναx1 t0 + νβx1 t1 : ναx2 t0 + νβx2 t1 )
14
que es la misma que
(t0 : t1 ) → (αx0 t0 + βx0 t1 : αx1 t0 + βx1 t1 : αx2 t0 + βx2 t1 ).
Como α, β están determinados a partir de los puntos mediante (2.12), la parametrización es
única. Además, es evidente que tal parametrización verifica las condiciones que queremos,
con lo que se concluye la demostración.
Ejemplo 2.13. Obsérvese que la demostración del teorema anterior es constructiva.
Por ejemplo, supongamos que queremos encontrar la única parametrización de la recta
X0 + X1 − X2 = 0 que manda (1 : 0) a (1 : 2 : 3), (0 : 1) a (2 : 3 : 5) y (1 : 1) a (1 : −1 : 0).
Entonces, lo primero que hay que hacer es encontrar la relación (2.12), es decir, hay que
escribir (1, −1, 0) como combinación lineal de (1, 2, 3) y (2, 3, 5). Tal relación es
(1, −1, 0) = −5(1, 2, 3) + 3(2, 3, 5) = (−5, −10, −15) + (6, 9, 15)
con lo que la parametrización queda
(t0 : t1 ) → (−5t0 + 6t1 : −10t0 + 9t1 : −15t0 + 15t1 ).
Ejemplo 2.14. Una pregunta natural es cómo son todas las parametrizaciones de una
recta. Por ejemplo, para la recta X0 + X1 − X2 = 0, la Observación 2.10 y el Ejemplo
2.13 nos dan hasta tres parametrizaciones distintas. Para ello tomamos por ejemplo la
parametrización
(x0 : x1 : x2 ) = (−5t0 + 6t1 : −10t0 + 9t1 : −15t0 + 15t1 )
del ejemplo anterior, y calculamos su inversa (ver la Observación 2.6)
(t0 : t1 ) = (9x0 − 6x1 : 10x0 − 5x1 ).
Entonces, si consideramos la composición de la parametrización
(t0 : t1 ) → (2t0 : −t1 : 2t0 − t1 )
con la inversa anterior tendremos
(t0 : t1 )→(2t0 : −t1 : 2t0 −t1 )→ 9(2t0 )−6(−t1 ) : 10(2t0 )−5(−t1 ) =(18t0 +6t1 : 20t0 +5t1 ).
Lema 2.15. Dados a, b, c, d ∈ k, son equivalentes:
15
(i) (t0 : t1 ) → (at0 + bt1 : ct0 + dt1 ) es una biyección.
(ii) (t0
(t0
a
(iii) c
: t1 ) → (at0 + bt1 : ct0 + dt1 ) está bien definido, es decir, no existe ningún valor
: t1 ) ∈ P1k tal que at0 + bt1 , ct0 + dt1 ) = (0, 0).
b = 0.
c
Demostración: Es prácticamente igual que la del Lema 2.5.
(i) ⇒ (ii): Evidente.
a b
= 0, entonces el punto (−b : a) = (−d : c) no tendrı́a imagen.
(ii) ⇒ (iii): Si fuera c c
(iii) ⇒ (i): (t0 : t1 ) → (dt0 − bt1 : −ct0 + at1 ) es la inversa.
Definición. Llamaremos cambio de variable en P1k a una aplicación ψ : P1k → P1k de
la forma ψ(t0 : t1 ) = (at0 + bt1 : ct0 + dt1 ) verificando cualquiera de las condiciones
equivalentes del lema anterior.
Lema 2.16. Sea ϕ : P1k → L una parametrización de la recta L. Entonces, todas las
parametrizaciones de L son de la forma ϕ ◦ ψ, donde ψ es un cambio de variable en P1k .
Demostración: Si ϕ : P1k → L es otra parametrización de L, tal y como hemos hecho en
el Ejemplo 2.14 se observa que ϕ−1 ◦ ϕ es un cambio de variable ψ, con lo que ϕ = ϕ ◦ ψ.
Recı́procamente, es claro que la composición de un cambio de variable con ϕ tiene el
aspecto (t0 : t1 ) → (a0 t0 + b0 t1 : a1 t0 + b1 t1 : a2 t0 + b2 t1 ), y como está bien definida es una
parametrización por el Lema 2.5.
Nos planteamos ahora el mismo tipo de problema pero cambiando de una recta a otra.
Lema 2.17. Sea f : L → L una aplicación entre dos rectas proyectivas. Entonces son
equivalentes.
(i) Existe una parametrización ϕ : P1k → L tal que f ◦ ϕ es una parametrización de L .
(ii) Para cada parametrización ϕ : P1k → L, se tiene que f ◦ ϕ es una parametrización de
L .
(iii) Para cada parametrización ϕ : P1k → L y cada parametrización ϕ :
−1
que ϕ ◦ f ◦ ϕ es un cambio de variable en P1k .
(iv) Existen parametrizaciones ϕ :
cambio de variable en P1k .
P1k
→ L y ϕ :
Demostración:
16
P1k
P1k → L se tiene
→ L tales que ϕ
−1
◦ f ◦ ϕ es un
(i) ⇒ (ii): Sabemos que para una parametrización concreta ϕ de L se tiene que f ◦ ϕ es
una parametrización de L . Entonces, por el Lema 2.16, cualquier otra parametrización
de L es de la forma ϕ = ϕ ◦ ψ, donde ψ es un cambio de variable en P1k . Por tanto,
f ◦ ϕ = (f ◦ ϕ) ◦ ψ, que es la composición del cambio de variable ψ con la parametrización
f ◦ ϕ, luego de nuevo por el Lema 2.16 es una parametrización de L .
(ii) ⇒ (iii): Sean ϕ, ϕ parametrizaciones de L y L respectivamente. Por hipótesis, f ◦ ϕ
−1
es una parametrización de L , luego por el Lema 2.16 se tiene que ϕ ◦ f ◦ ϕ es un cambio
de variable en P1k .
(iii) ⇒ (iv): Evidente.
(iv) ⇒ (i): Como ϕ ◦ f ◦ ϕ es un cambio de variable en P1k , por el Lema 2.16 se tiene
−1
que ϕ ◦ (ϕ ◦ f ◦ ϕ) es una parametrización de L , de donde se sigue el resultado.
−1
Definición. Una proyectividad entre dos rectas proyectivas L y L es una aplicación f :
L → L que verifica cualquiera de las condiciones del Lema 2.17.
Veamos algunos ejemplos de proyectividades de rectas.
Proposición 2.18. Sea L una recta de P2 y sea a ∈ P2k un punto que no está en L. Sea
∗
Ω(a) ⊂ P2k el haz de rectas que pasan por a. Entonces:
(i) La aplicación L → Ω(a) que asocia a cada punto p ∈ L la recta que pasa por a y p es
una proyectividad.
(ii) La aplicación Ω(a) → L que asocia a cada recta del haz su intersección con la recta L
es una proyectividad.
Demostración: Sea ϕ : P1 → L una parametrización dada por
ϕ(t0 : t1 ) = l0 (t0 , t1 ) : l1 (t0 , t1 ) : l2 (t0 , t1 ) ,
donde l0 , l1 , l2 son formas lineales en t0 , t1 . Si a tiene coordenadas (a0 : a1 : a2 ), la recta
generada por a y l0 (t0 , t1 ) : l1 (t0 , t1 ) : l2 (t0 , t1 ) tiene como ecuación
X0
X
X
1
2
=0
a0
a1
a2
l0 (t0 , t1 ) l1 (t0 , t1 ) l2 (t0 , t1 ) es decir, sus coordenadas en
P2k ∗ son
(u0 : u1 : u2 ) = a1 l2 (t0 , t1 )−a2 l1 (t0 , t1 ) : a2 l0 (t0 , t1 )−a0 l2 (t0 , t1 ) : a0 l1 (t0 , t1 )−a1 l0 (t0 , t1 )
lo que da una parametrización de Ω(a). Por tanto, la aplicación de (i) es una proyectividad.
17
La aplicación de (ii) es la inversa de la de (i), con lo que también es una proyectividad
(también puede verse por dualidad).
Proposición 2.19. Sean L, L dos rectas distintas y sea a un punto fuera de ellas. Entonces la aplicación L → L que asocia a cada punto p ∈ L el punto de intersección de L
con la recta generada por a y p es una proyectividad.
Demostración: Se sigue inmediatamente de la Proposición 2.18. En efecto, L → L es la
composición de L → Ω(a) que asocia a cada punto p ∈ L la recta que generan a y p (que
es una proyectividad) y de Ω(a) → L que asocia a cada recta del haz su intersección con
L (que es una proyectividad). Como es claro que la composición de proyectividades es
una proyectividad, se sigue el resultado.
Definición. Se llama perspectividad entre dos rectas a una proyectividad definida como en
la Proposición 2.19. El punto a se llama centro de la perspectividad.
Observemos que una perspectividad no es la proyectividad más general entre dos
rectas, ya que el punto de intersección de las rectas queda fijo por una perspectividad, pero
no necesariamente por una proyectividad. En realidad, veremos que el que tal punto quede
fijo caracteriza las perspectividades. Para ello necesitamos en primer lugar el siguiente
resultado, que es importante en sı́ mismo.
Teorema 2.20. Dadas dos rectas L, L tres puntos distintos a, b, c ∈ L y tres puntos
distintos a , b , c ∈ L , existe una única proyectividad f : L → L tal que f (a) = a ,
f (b) = b y f (c) = c .
Demostración: Aplicando el Teorema 2.11, sean ϕ : P1k → L la única parametrización de
L tal que ϕ(1 : 0) = a, ϕ(0 : 1) = b, ϕ(1 : 1) = c y ϕ : P1k → L la única parametrización
de L tal que ϕ(1 : 0) = a , ϕ(0 : 1) = b , ϕ(1 : 1) = c . Entonces, f = ϕ ◦ ϕ−1 es
una proyectividad que cumple la propiedad buscada. Además, si f es otra proyectividad
en las mismas condiciones, se tiene que f ◦ ϕ es una parametrización de L que manda
respectivamente (1 : 0), (0 : 1), (1 : 1) a a , b , c , por lo que de nuevo por el Teorema 2.11
se tiene f ◦ ϕ = ϕ , con lo que f = f .
Teorema 2.21. Sean L, L dos rectas distintas con punto de intersección a. Entonces una
proyectividad f : L → L es una perspectividad si y sólo si f (a) = a.
Demostración: Sean b, c otros dos puntos de L distintos de a y tomamos b = f (b) y
c = f (c). Consideramos el punto de intersección q de las rectas bb y cc . Entonces, si
πq : L → L es la perspectividad de centro q, entonces es claro que πq (a) = a, πq (b) = b y
πq (c) = c . Por el Teorema 2.20, se sigue que f = πq .
18
Aunque las perspectividades no sean todas las proyectividades, al menos las proyectividades se pueden obtener a partir de perspectividades:
Teorema 2.22. Toda proyectividad f : L → L es composición de perspectividades.
Demostración: Observamos en primer lugar que podemos suponer L = L . En efecto, si
fueran L = L , tomando L = L y una perspectividad cualquiera π : L → L se tendrı́a
que, supuesto demostrado el teorema para rectas distintas, f ◦ π −1 es composición de
perspectividades, con lo que f también lo serı́a. Suponemos pues que L y L son dos
rectas distintas e ilustraremos la demostración con la siguiente figura:
L
c
b
L'
a
p
a'
b'
a''
q
b''
L"
c''
Sean a, b, c tres puntos distintos de L y a , b , c sus respectivas imágenes por f en
L , con la condición de que ni c ni c son el punto de intersección de L y L . Sea p un
punto de la recta cc distinto de c y c . Tomamos una recta L que pase por c pero que
no pase ni por c ni por a . Sean a y b los respectivos puntos de intersección de L con
las rectas pa y pb. Finalmente, sea q el punto de intersección de las rectas a a y b b . Si
πp : L → L es la perspectividad de centro p y πq : L → L es la perspectividad de centro
q se tiene
πp
f L −→ L −→ L
a → a → a
b → b → b
c → c → c
con lo que, por el Teorema 2.20, se tiene f = πq ◦ πp .
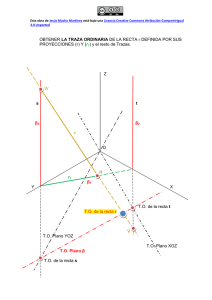
Teorema 2.23 (Desargues). Sean a, b, c, a , b , c dos ternas de puntos no alineados y
todos ellos distintos entre sı́. Sean los puntos p = ab ∩ a b , q = ac ∩ a c y r = bc ∩ b c .
Entonces las rectas aa , bb , cc son concurrentes en un punto si sólo si los puntos p, q, r
están alineados.
Demostración: Supongamos en primer lugar que las rectas aa , bb , cc son concurrentes en
un punto o. Ilustramos la demostración con la siguiente figura:
19
p
L
a'
t
a
o
b
t'
L'
b'
c
t''
c'
r
L''
q
Escribimos L = aa , L = bb , L = cc , t = pr ∩L, t = pr ∩L , t = pr ∩ L y definimos
πp la perspectividad de L sobre L con centro p y πr la proyectividad de L sobre l con
centro r. Se tendrá
πp
πr
L
L −→ L −→
o →
o
→
o
a →
b
→
c
→ b
→
c
a
t
→ t
→ t
La composición πr ◦ πp es una proyectividad que deja fijo el punto o, luego por el Teorema
2.21 es una perspectividad, y su centro es necesariamente ac ∩ a c = q. Como la imagen
de t por esta perspectividad es t , se tiene que t, t , q están alineados, es decir, que q está
en la recta generada por t, t , que es la recta p, r, por lo que p, q, r están alineados.
El recı́proco es precisamente el enunciado dual del que acabamos de demostrar.
20
3. Razón doble
En esta sección definiremos el concepto más importante de geometrı́a proyectiva, que
ya veremos más adelante que es el que caracteriza tal geometrı́a.
Definición. Sean a, b, c, d cuatro puntos distintos de una recta L. Sea ϕ : P1k → L la única
parametrización de L tal que ϕ(1 : 0) = a, ϕ(0 : 1) = b, ϕ(1 : 1) = c. Si d = ϕ(ρ0 : ρ1 ),
llamaremos razón doble de los cuatro puntos a ρ := ρρ01 , y la denotaremos normalmente por
[a, b, c, d] (OJO: la definición no es unánime, y para muchos la razón doble es ρρ10 , es decir,
el valor inverso del que definimos nosotros). A veces suele extenderse la definición a los
casos d = a, b, c, en que ρ = ∞, 0, 1, respectivamente; si no, ρ toma valores en k \ {0, 1}.
Antes de ver las propiedades de la razón doble, veamos cómo se calcula, lo que nos
ayudará a entender su significado geométrico.
Lema 3.1. Sean a = (a0 : a1 : a2 ), b = (b0 : b1 : b2 ), c
cuatro puntos alineados de modo que la recta que los
Entonces
a0 c0 b0
a1 c1 b1
[a, b, c, d] = a0 d0 b0
a1 d1 b1
= (c0 : c1 : c2 ), d = (d0 : d1 : d2 )
contiene no pasa por (0 : 0 : 1).
d0 d1 c0 c1 (obviamente, se obtienen resultados simétricos si se supone que (1 : 0 : 0) o (0 : 1 : 0) no
están en la recta).
Demostración: Para calcular la única parametrización ϕ de la recta abcd que manda
(1 : 0), (0 : 1), (1 : 1) respectivamente a a, b, c seguimos los pasos del Teorema 2.11.
Observamos en primer lugar
que, como (1 : 0 : 0) no está alineado con a, b, c, d, por ejemplo
1 0 0 a0 b0 a1 b1 = a0 a1 a2 = 0, y lo mismo para los menores de orden dos formados por
b0 b1 b2 las dos primeras coordenadas de cualquier par de puntos entre a, b, c, d. Esto quiere decir
que, a la hora de escribir las coordenadas de c en función de las de a y b basta trabajar
con las dos primeras coordenadas. Entonces un simple cálculo (por ejemplo con la regla
de Cramer) muestra que:
c0 b0 a0 c0 c1 b1 a1 c1 (a0 , a1 , a2 ) + (c0 , c1 , c2 ) = a0 b0 (b0 , b1 , b2 )
a
b
0
0
a1 b1 a1 b1 con lo que ϕ tendrá de ecuación
(t0 : t1 ) →
21
c
( 0
c1
a0
b0 t
+
a
0
0
a1
b1 c0 b t
c1 0 1
c
: 0
c1
a0
b0 t
+
a
1
0
a1
b1 c0 b t
c1 1 1
c
: 0
c1
a0
b0 t
+
a
2
0
a1
b1 c0 b t )
c1 2 1
(después de quitar denominadores). Repitiendo las mismas cuentas con d al puesto de c,
se tendrá
d 0 b0 a0 d0 d 1 b1 a1 d1 (a0 , a1 , a2 ) + (d0 , d1 , d2 ) = a0 b0 (b0 , b1 , b2 )
a0 b0 a1 b1 a1 b1 lo que indica que el valor (d0 : d1 : d2 ) se alcanza en la parametrización para
d0
d1
(ρ0 : ρ1 ) = ( c0
c1
b0 a0
b1 a1
: b0 a0
b1 a1
d0 d1 )
c0 c1 de donde sigue el resultado.
Observación 3.2. Usemos la fórmula anterior para interpretar la razón doble de cuatro puntos afines que estén en una recta que no sea vertical (recordemos que las rectas
afines verticales son las que pasan por el punto (0 : 0 : 1)). Tomamos entonces cuatro
puntos alineados (a1 , a2 ), (b1 , b2 ), (c1 , c2 ), (d1 , d2 ) de forma que sus segundas coordenadas
sean siempre distintas. Una vez Identificados con los correspondientes puntos del plano
proyectivo (1 : a1 : a2 ), (1 : b1 : b2 ), (1 : c1 : c2 ), (1 : d1 : d2 ), su razón doble es
[a, b, c, d] =
(c1 − a1 )(d1 − b1 )
=
(d1 − a1 )(c1 − b1 )
c1 −a1
d1 −a1
c1 −b1
d1 −b1
c1 −a1
d1 −a1
representa la proporción entre el vector ac
y el vector ad
1
(lo que se llama la razón simple de a, d, c), mientras que dc11−b
−b1 es la proporción entre bc y
(es decir, la razón simple de b, d, c). La razón simple es invariante por afinidades (ya
bd
Por estar a, b, c alineados,
que éstas preservan las proporciones), y de hecho el preservar la razón simple de ternas
caracteriza a las afinidades. En geometrı́a proyectiva, sin embargo, las proyectividades
no preservan las proporciones. Piénsese en tres puntos alineados a, b, c, con b entre a y
c. Si “miramos” la recta desde un punto externo entre a y b (es decir, si hacemos una
perspectividad desde dicho punto) nos parecerá ver que proporcionalmente, la distancia
entre a y b es mucho mayor que la distancia entre b y c, mientras que mirando desde
un punto externo entre b y c nos parecerá ahora que la distancia entre b y c es mucho
mayor que la distancia entre a y b. El resultado central en geometrı́a proyectiva es que lo
que permanecerá invariante no serán las proporciones (i.e. la razón simple), sino la doble
22
proporción (i.e. la proporción entre proporciones, el cociente entre dos razones simples: la
razón doble; de ahı́ su nombre).
Observación 3.3. Tomemos ahora a como punto del infinito de la recta bcd. Usando de
nuevo la fórmula del Lema 3.1 obtendremos ahora
d 1 − b1
[a, b, c, d] =
c1 − b1
es decir, la razón simple de b, c, d. Nótese que d será el punto medio de c y d si y sólo si
= −bc,
es decir, si la razón simple de b, c, d (que hemos dicho que es [a, b, c, d] es −1.
bd
Definición. Se llama cuaterna armónica a cuatro puntos alineados a, b, c, d tales que
[a, b, c, d] = −1.
Veamos que, efectivamente, las proyectividades preservan la razón doble (y que de
hecho están caracterizadas por esta propiedad):
Teorema 3.4. Sea f : L → L una aplicación inyectiva entre dos rectas. Entonces f
es una proyectividad si y sólo si para cada a, b, c, d ∈ L distintos se tiene [a, b, c, d] =
[f (a), f (b), f (c), f (d)].
Demostración: Supongamos en primer lugar que f es una proyectividad y sean cuatro
puntos distintos a, b, c, d ∈ L. Sea ϕ : P1k → L la única parametrización de L que manda
(1 : 0), (0 : 1), (1 : 1) respectivamente a a, b, c. Si ρ = [a, b, c, d], entonces ϕ(ρ : 1) = d.
Por otra parte, f ◦ ϕ es una parametrización de L que manda (1 : 0), (0 : 1), (1 : 1)
respectivamente a f (a), f (b), f (c), y por tanto es la única. Como f ◦ ϕ(ρ : 1) = f (d), se
sigue que [f (a), f (b), f (c), f (d)] = ρ, y por tanto coincide con [a, b, c, d], como querı́amos.
Recı́procamente, supongamos que f conserva la razón doble. Fijamos tres puntos distintos a, b, c ∈ L y consideramos la única proyectividad g : L → L tal que
g(a) = f (a), g(b) = f (b), g(c) = f (c) (son tres puntos distintos por ser f inyectiva).
Queremos ver que g = f . Para ello tomamos cualquier otro punto d ∈ L y veamos que
g(d) = f (d). Por hipótesis, [a, b, c, d] = [f (a), f (b), f (c), f (d)], mientras que por la parte
ya demostrada, sabemos que [a, b, c, d] = [g(a), g(b), g(c), g(d)] = [f (a), f (b), f (c), g(d)].
Por tanto, [f (a), f (b), f (c), f (d)] = [f (a), f (b), f (c), g(d)]. Sea ϕ : P1k → L la única
parametrización tal que (1 : 0), (0 : 1), (1 : 1) van a parar respectivamente a f (a), f (b), f (c).
Por definición de razón doble, si ρ = [f (a), f (b), f (c), f (d)], entonces ϕ(ρ : 1) = f (d), y
como también ρ = [f (a), f (b), f (c), g(d)], se tiene ϕ(ρ : 1) = g(d), luego g(d) = f (d).
Corolario 3.5. Sean a, b, c, d y a , b , c , d dos cuaternas de puntos alineados. Entonces
se tiene que [a, b, c, d] = [a , b , c , d ] si y sólo si existe una composición de perspectividades
que manda una cuaterna a otra.
Demostración: Es conssecuencia inmediata del Teorema 3.4 y del Teorema 2.22.
23
Observación 3.6. Nótese que la última parte de la demostración del Teorema 3.4 en
realidad demuestra que, en general, dados puntos a , b , c , d , e en una recta L tales que
[a , b , c , d ] = [a , b , c , e ], entonces d = e .
Veamos una aplicación de la observación anterior. Para ello, necesitaremos previamente una definición.
Definición. Llamaremos complexificación de una recta proyectiva real L a la recta compleja
LC que tiene en el plano proyectivo la misma ecuación de L. Equivalentemente, si L es la
recta que pasa por dos puntos reales a, b, LC es la recta del plano proyectivo que pasa por
a y b.
Proposición 3.7. Sean L, L rectas proyectivas reales y sean a, b, c ∈ LC tres puntos
distintos, y a , b , c ∈ LC sus respectivas imágenes por una proyectividad f : LC → LC . Si
se verifica que f (ā) = a , f (b̄) = b , f (c̄) = c (donde la barra indica conjugación), entonces
¯ = f (d). En particular, f manda puntos reales a
para cualquier d ∈ LC se verifica f (d)
puntos reales y define una proyectividad entre las rectas reales. Como consecuencia, las
siguientes son condiciones suficientes para que una proyectividad f : LC → LC induzca
una proyectividad de L en L :
(i) f manda tres puntos reales a tres puntos reales.
(ii) f manda un punto real a un punto real y un par de puntos imaginarios conjugados a
un par de puntos imaginarios conjugados.
(iii) f manda dos pares de puntos conjugados a dos pares de puntos conjugados.
Demostración: Por la Observación 3.6 bastará ver que, para todo d = a, b, c, se tiene
¯ = [a , b , c , f (d)]. Como la fórmula del Lema 3.1 implica claramente que la
[a , b , c , f (d)]
razón doble de los conjugados de cuatro puntos es el conjugado de la razón doble de los
¯ = [ā , b̄ , c̄ , f (d)]
cuatro puntos, dicha igualdad será equivalente a [a , b , c , f (d)]
¯ = [a, b, c, d]
¯ y
Por ser f una proyectividad, el Teorema 3.4 implica [a , b , c , f (d)]
[ā , b̄ , c̄ , f (d)] = [ā, b̄, c̄, d] que claramente son conjugados el uno del otro, lo que demuestra
la igualdad que querı́amos.
¯ = f (d), lo que implica que f (d) es
Si d es real, entonces d¯ = d, con lo que f (d) = f (d)
real. El hecho de que f restringida a la parte real de L sea una proyectividad es de nuevo
consecuencia del Teorema 3.4, ya que f conserva la razón doble.
Observación 3.8. La parte (i) de la proposición anterior es inmediata, ya que por el
Teorema 2.20 existe una única proyectividad (tanto de L a L como de LC a LC que manda
tres puntos dados a tres puntos dados). Lo novedoso (y que usaremos más adelante) es que
las partes (ii) y (iii) permiten definir proyectividades reales definiéndolas a partir de las
24
imágenes de puntos imaginarios. Cabrı́a pensar que basta mandar dos puntos imaginarios
conjugados a dos puntos imaginarios conjugados para tener una proyectividad real, pero
no es ası́. Por ejemplo, la proyectividad de {X0 = 0}
(0 : X1 : X2 ) → (2X0 + iX1 : −iX0 + 2X1 )
manda (0 : 1 : i) y (0 : 1 : −i) a sı́ mismos, pero por ejemplo la imagen de (0 : 1 : 0) es el
punto imaginario (0 : 2 : −i).
Observación 3.9.
De la fórmula del Lema 3.1 se deduce inmediatamente que, si
[a, b, c, d] = ρ, entonces:
[a, b, c, d] = [b, a, d, c] = [c, d, a, b] = [d, c, b, a] = ρ
[b, a, c, d] = [a, b, d, c] = [c, d, b, a] = [d, c, a, b] =
1
ρ
Cabe preguntarse pues qué ocurre al hacer las demás permutaciones del conjunto de puntos.
Por ejemplo,
d0 c0 b0 a0 d1 c1 b1 a1 a b c d − a0 b1 c1 d0 − a1 b0 c0 d1 + a0 b1 c0 d1
=− 1 0 1 0
[d, b, c, a] = a0 d0 b0 c0 d0 a0 b0 c0 d1 a1 b1 c1 a1 d1 b1 c1 que, sumado con
a0
a1
ρ = a0
a1
c0 b0 d0 c1 b1 d1 a b c d − a0 b1 c1 d0 − a1 b0 c0 d1 + a1 b1 c0 d0
= 0 0 1 1
a0 d0 b0 c0 d0 b0 c0 a1 d1 b1 c1 d1 b1 c1 da
a0 b0 c1 d1 + a1 b1 c0 d0 − a1 b0 c1 d0 − a0 b1 c0 d1
(a0 d1 − a1 d0 )(b0 c1 − b1 c0 )
=
=1
a0 d0 b0 c0 a0 d0 b0 c0 a1 d1 b1 c1 a1 d1 b1 c1 Por tanto, y observando las simetrı́as que ya tenı́amos:
[d, b, c, a] = [b, d, a, c] = [c, a, d, b] = [a, c, b, d] = 1 − ρ
De aquı́ se sigue fácilmente, combinando permutaciones anteriores:
[b, d, c, a] = [a, c, d, b] = [d, b, a, c] = [c, a, b, d] =
25
1
1−ρ
[a, d, c, b] = [d, a, b, c] = [c, b, a, d] = [b, c, d, a] = 1 −
ρ
1
=
1−ρ
ρ−1
[d, a, c, b] = [a, d, b, c] = [c, b, d, a] = [b, c, a, d] =
ρ−1
ρ
Ası́ que la razón doble de cuatro puntos, al hacer todas las permutaciones posibles del
orden de los puntos, toma seis valores. Dichos seis valores son distintos, excepto cuando
las posibles razones dobles
son
{−1, 12 , 2} (que corresponde a una cuaterna armónica y sus
√
√
permutaciones) o { 1+2 3i , 1−2 3i }.
Observación 3.10. Dadas cuatro rectas L1 , L2 , L3 , L4 concurrentes en un punto a, tiene
sentido hablar de su razón doble, ya que son cuatro puntos del haz Ω(a), que es una recta
∗
en P2k . Además, dada cualquier recta L que no pase por a, si llamamos ai = L∩Li , se tiene
que [L1 , L2 , L3 , L4 ] = [a1 , a2 , a3 , a4 ], aplicando el Teorema 3.4 y el hecho (ver Proposición
2.18) de que la aplicación f : Ω(a) → L definida por f (L ) = L ∩ L es una proyectividad.
Observación 3.11. De la fórmula del Lema 3.1 para calcular la razón doble de cuatro
puntos, se sigue que, si a, b, c, d, e son cuatro puntos alineados, entonces
[a, b, c, d][a, b, d, e] = [a, b, c, e].
El motivo geométrico para esta igualdad se obtiene de pensar que a es el punto del infinito
y bc,
[a, b, d, e] es
de la recta, por lo que [a, b, c, d] es la proporción entre los vectores bd
y bd,
mientras que [a, b, c, e] es la proporción entre
la proporción entre los vectores be
y bc.
De hecho, esta observación nos permite construir geométricamente
los vectores be
el producto de dos razones dobles. En efecto, si [a, b, c, d] = λ y [a , b , c , d ] = λ , es
siempre posible mediante perspectividades encontrar e tal que [a, b, d, e] = λ . Por tanto,
[a, b, c, e] = λλ .
La construcción de la suma de razones dobles es más complicada, pero también puede
hacerse geométricamente:
Proposición 3.11. Sean a, b dos puntos distintos de una recta L y sean d1 , d2 ∈ L\{a, b}.
Dada L una recta cualquiera que pase por a y un punto cualquiera fuera de L y L ,
sean b , d2 las imágenes en L por la perspectividad desde p. Consideramos los puntos
q = b d1 ∩ ap y d = qd2 ∩ L. Entonces
[a, b, c, d] = [a, b, c, d1 ] + [a, b, c, d2 ]
para cualquier punto c ∈ L.
26
p
q
a
d
d2
d1
d' 2
b
L'
L
b'
Demostración: Si tomamos la recta ap como recta del infinito, entonces las rectas L y L
2 = bd = d1 d, de donde se sigue el resultado.
son paralelas. Además, tendremos bd
2
27
4. Cónicas proyectivas
Ejemplo 4.1. Si consideramos la ecuación X02 + X12 + X22 = 0 en P2R , es claro que no hay
ningún punto que la satisfaga. Lo mismo puede decirse de la ecuación X02 + X12 + 4X22 = 0.
Sin embargo, en cierto modo deberı́amos considerar que son cónicas distintas, ya que la
primera pasa por el punto imaginario (0 : 1 : i), mientras que la segunda no pasa por
él. En ese sentido, vamos a considerar las cónicas como ecuaciones, no como conjuntos de
puntos (si trabajamos sobre un cuerpo algebraicamente cerrado, ambos conceptos son sin
embargo equivalentes).
Definición. Una cónica en P2k es una ecuación de la forma u00 X02 + u01 X0 X1 + u02 X0 X2 +
u11 X12 + u12 X1 X2 + u22 X22 . Dos cónicas se considerarán iguales si y sólo si sus respectivas
ecuaciones son proporcionales. De todas formas, recurriremos muchas veces al abuso de
notación de considerar la cónica como el conjunto de puntos que satisfacen la ecuación.
Cuando la caracterı́stica de k es distinta de dos (cosa que supondremos en todo este
capı́tulo), la ecuación se puede escribir de forma matricial como
u00 u201 u202
X0
(X0 X1 X2 ) u201 u11 u212 X1 = 0
u12
u02
u22
X2
2
2
con lo que una cónica se puede siempre identificar con una matriz simétrica no nula de
orden tres módulo multiplicación por constante.
Recordemos de Álgebra Lineal que toda matriz simétrica A se puede diagonalizar (por
congruencia), en el sentido de que existen matrices de orden tres P y D tales que P tiene
determinante no nulo, D es diagonal y A = P t DP . Esto quiere decir que la ecuación de
toda cónica se puede escribir de la forma
0
λ0 0
X0
(X0 X1 X2 )P t 0 λ1 0 P X1 = 0.
X2
0
0 λ2
X0
X0
En otras palabras, si escribimos X1 = P X1 , la ecuación de la cónica quedará de
X2
X2
2
2
2
la forma λ0 X0 + λ1 X1 + λ2 X2 = 0.
X0
Definición. Llamamos cambio de coordenadas en P2k a una expresión de la forma X1 =
X2
X0
P X1 , donde P es una matriz de orden tres de determinante no nulo. Nótese que
X2
28
un cambio de coordenadas manda polinomios homogéneos de grado d a polinomios homogéneos de grado d. Sin embargo, si se piensa en el plano como completado de un plano
afı́n, hay que notar que en las nuevas coordenadas la recta del infinito ya no tiene por qué
ser X0 = 0.
Veamos, en función de λ0 , λ1 , λ2 , los tipos de cónicas que tenemos. Recordemos también de Álgebra Lineal que el rango de A es el número de λi distintos de cero.
Caso 1) rg(A) = 1.
Supongamos por ejemplo λ1 = λ2 = 0, con lo que tras el cambio de coordenadas
2
2
nos queda la ecuación λ0 X0 = 0, o equivalentemente X0 = 0. Escribiendo P = (pij ),
tendremos X0 = p00 X0 +p01 X1 +p02 X2 , con lo que la ecuación original es (p00 X0 +p01 X1 +
p02 X2 )2 = 0, que es una recta doble.
Caso 2) rg(A) = 2.
Supongamos por ejemploλ2 = 0, con lo que tendremos la ecuación λ0 X0 +λ1 X1 = 0,
2
2
que es equivalente a X0 = ± − λλ10 X1 . Deshaciendo el cambio de coordenadas tendremos
las dos rectas (distintas)
λ1
λ1
λ1
(p00 + − p10 )X0 + (p01 + − p11 )X1 + (p02 + − p12 )X2 = 0
λ0
λ0
λ0
λ1
λ1
λ1
(p00 − − p10 )X0 + (p01 − − p11 )X1 + (p02 − − p12 )X2 = 0
λ0
λ0
λ0
En principio, si el cuerpo k no es algebraicamente cerrado, puede ocurrir − λλ10 ∈ k, en
cuyo caso las dos rectas serı́an imaginarias conjugadas. Obsérvese que, en contraste con
el caso afı́n, no hay que distinguir si las rectas se cortan o no, ya que dos rectas del plano
proyectivo se cortan siempre.
Caso 3) rg(A) = 3.
Dependiendo de cómo sea el cuerpo k tendremos más o menos subcasos. Si k es
algebraicamente cerrado, a la hora de diagonalizar A sabemos que podemos obtener λ0 =
λ1 = λ2 = 1, con lo que todas las cónicas son equivalentes, después de un cambio de
2
2
2
coordenadas, a X0 + X1 + X2 = 0. Si en cambio k = R, a la hora de diagonalizar la
matriz simétrica A, tendremos varios casos, dependiendo de la signatura de A:
–Si la signatura de A es (3, 0), podremos obtener λ0 = λ1 = λ2 = 1, con lo que después
2
2
2
de un cambio de coordenadas tendremos X0 + X1 + X2 = 0, que no tiene puntos reales.
Lo mismo ocurre si la signatura es (0, 3), ya que basta con cambiar el signo a toda la
ecuación de la cónica.
–Si la signatura de A es (2, 1), podremos obtener λ0 = λ1 = 1, λ2 = −1, con lo que
2
2
2
después de un cambio de coordenadas tendremos X0 + X1 − X2 = 0, que ahora sı́ tiene
puntos reales. Como antes, obtenemos lo mismo si la signatura es (1, 2).
29
Definición. Llamaremos cónica no degenerada a una cónica representada por una matriz
de rango tres. Si no tiene puntos en P2k , diremos que es una cónica imaginaria.
Resumimos a continuación en sendas tablas la clasificación de cónicas que hemos
obtenido cuando k es algebraicamente cerrado y cuando k = R.
Cónicas en
P2k con k algebraicamente cerrado
Tipo de cónica
Caracterización
Cónica no degenerada
rg(A) = 3
Par de rectas
rg(A) = 2
Recta doble
rg(A) = 1
Cónicas en P2R
Tipo de cónica
Caracterización
Cónica no degenerada real
rg(A) = 3, sgn(A) = (2, 1), (1, 2)
Cónica no degenerada imaginaria
rg(A) = 3, sgn(A) = (3, 0), (0, 3)
Par de rectas reales
rg(A) = 2, sgn(A) = (1, 1)
Par de rectas imaginarias conjugadas
rg(A) = 2, sgn(A) = (2, 0), (0, 2)
Recta doble
rg(A) = 1
Proposición 4.2. Sea C el conjunto de puntos de una cónica no degenerada de matriz A
b2 ) distinto
y sea a = (a0 : a1 : a2 ) un punto de C. Entonces, para cada punto b = (b0 : b1 :
b0
de a, la recta ab corta a C en un solo punto distinto a a, excepto si (a0 a1 a2 )A b1 = 0,
b2
en que la intersección es sólo el punto a.
Demostración: Parametrizamos la recta que pasa por a y b de la forma (x0 : x1 : x2 ) =
(a0 t0 + b0 t1 : a1 t0 + b1 t1 : a2 t0 + b2 t1 ) y sustituyendo en la ecuación de la cónica obtenemos
que los puntos de la intersección de la recta y C corresponden a las soluciones de
a0
b0
b0
(a0 a1 a2 )A a1 t20 + 2 (a0 a1 a2 )A b1 t0 t1 + (b0 b1 b2 )A b1 t21 = 0.
a2
b2
b2
30
El coeficiente de t20 es cero, ya que a está en la cónica, con lo que obtenemos que las
soluciones son t1 = 0 (que da el punto a) y las soluciones de
b0
b0
2 (a0 a1 a2 )A b1 t0 + (b0 b1 b2 )A b1 t1 = 0.
b2
b2
Basta ver que la ecuación anterior no es idénticamente nula, porque entonces
nos dará una
b0
segunda solución, que coincidirá con la primera si y sólo si (a0 a1 a2 )A b1 = 0.
b2
b0
b0
Supongamos pues que (a0 a1 a2 )A b1 = 0 y (b0 b1 b2 )A b1 = 0. Eso
b2
b2
quiere decir (junto con la condición
de
que
a
está
en
C)
que
tanto
a
como b verifican
X0
X0
= 0 y (b0 b1 b2 )A X1 = 0, es decir, que amlas ecuaciones (a0 a1 a2 )A X1
X2
X2
bas ecuaciones representan a la recta ab y por tanto son proporcionales. Es decir, existe λ ∈ k tal que (a0 a1 a2 )A = λ(b0 b1 b2 )A. Multiplicando por A−1 obtendrı́amos
(a0 , a1 , a2 ) = λ(b0 , b1 , b2 ), lo que es absurdo porque (a0 , a1 : a2 ) = (b0 : b1 : b2 ).
Definición. Dada una cónica no degenerada de matriz A y un punto a = (a0 : a1 : a2 )
de la misma,se llama
recta tangente a la cónica en el punto a a la recta de ecuación
X0
(a0 a1 a2 )A X1 = 0. Más en general, dado un punto b = (b0 : b1 : b2 ), no neceX2
sariamente en la cónica,
sellama recta polar del punto respecto de la cónica a la recta de
X0
ecuación (b0 b1 b2 )A X1 = 0.
X2
Corolario 4.3. Una cónica no degenerada C no contiene tres puntos alineados, y en
particular no contiene rectas.
Demostración: La primera parte es consecuencia inmediata de la Proposición 4.2. La
segunda parte se obtiene del hecho de que cualquier recta proyectiva contiene al menos
tres puntos distintos (ya que está en biyección con P1k , que contiene los puntos distintos
(1 : 0), (0 : 1), (1 : 1)).
Proposición 4.4. Dada una cónica no degenerada de matriz A, el conjunto de rectas
∗
tangentes a ella forma una cónica en P2k de matriz A−1 .
31
Demostración: Por definición, un punto (u0 : u1 : u2 ) ∈ P2k representa los coeficientes de
una recta tangente a la cónica si y sólo (u0 u1 u2 ) = (a0 a1 a2 )A para algún (a0 : a1 : a2 )
−1
de la cónica. Equivalentemente (a0 a1 a2 ) = (u0 u1 u2 )A
deben ser las coordenadas de
u0
un punto de la curva, es decir, (u0 u1 u2 )A−1 A(A−1 )t u1 = 0. Como A es simétrica,
u2
(A−1 )t = A−1 , lo que concluye el resultado.
∗
Definición. Dada una cónica no degenerada C de matriz A se llama cónica dual de C, y
∗
se denota por C ∗ , a la cónica de P2k de matriz A−1 . Se llama polo de una recta L respecto
∗
de la cónica C al punto de P2k que corresponde a la recta de P2k polar de L respecto de
C ∗.
Observación 4.5. El concepto de polaridad es el realmente importante a la hora de
describir una cónica y, de hecho, explica la definición, en apariencia artificiosa, que hemos
dado de cónica como ecuación y no como conjunto de puntos. En efecto, las cónicas
del Ejemplo 4.1 son realmente distintas porque la recta polar del punto (0 : 1 : 1) es
X1 + X2 = 0 respecto de la cónica X02 + X12 + X22 = 0, mientras que es X1 + 4X2 = 0
respecto de la cónica X02 + X12 + 4X22 = 0.
Recogemos las propiedades de la polaridad en el siguiente resultado:
Proposición 4.6. Sea C una cónica no degenerada de matriz A. Entonces:
(i) Un punto a es el polo de una recta L si y sólo si la recta L es la recta polar de a.
(ii) Un punto a está en la polar de un punto b si y sólo si b está en la polar de a si y sólo
si a está en la recta tangente a C en b si y sólo si b está en la recta tangente a C en a.
(iii) Un punto pertenece a su recta polar si y sólo si es un punto de la cónica.
(iv) Una recta pasa por su polo si y sólo si la recta es tangente a C.
(v) El polo de la recta que pasa por los puntos a y b es la intersección de las rectas polares
de a y b.
(vi) La recta polar de la intersección de las rectas L y L es la recta que pasa por los polos
de L y L .
Demostración: Si a = (a0 : a1: a2 )y L tiene coordenadas
0 : u1 : u2 ), entonces L es la
(u
a0
u0
recta polar de a si y sólo si A a1 es proporcional a u1 , mientras que a es el polo
a2
u2
u0
a0
−1
u1 es proporcional a a1 , y ambas condiciones son claramente
de L si y sólo si A
u2
a2
equivalentes.
32
La parte (ii) es clara,ya
que, por la Proposición 4.2, todas esas condiciones
son
b0
a0
equivalentes a (a0 a1 a2 )A b1 = 0 (que es equivalente a (b0 b1 b2 )A a1 = 0 por la
b2
a2
simetrı́a de A), siendo a = (a0 : a1 : a2 ), b = (b0 : b1 : b2 ). Haciendo a = b, obtenemos la
parte (iii), de la que (iv) es su aplicación a C ∗ .
Por (i) c es el polo de la recta que pasa por a y b si y sólo si la recta polar de c es la
recta que pasa por a y b, que por (ii) es equivalente a que c esté en las rectas polares de a
y b, es decir, c es la intersección de dichas rectas polares. Esto demuestra (v), y de nuevo
(vi) es lo mismo pero en C ∗ .
Ejemplo 4.7. Aplicando la Proposición 4.2 a C ∗ , tendremos que cada haz de rectas con
base fuera de C contiene dos rectas tangentes a C. Hay dos modos de calcular dichas
rectas. Veamos ambos métodos por ejemplo para calcular las rectas tangentes a la cónica
C de ecuación X0 X2 − X12 = 0 que pasan por el punto (0 : 1 : 1):
Método 1) Según hemos visto, la tangente en un punto a de C pasa por (0 : 1 : 1)
si y sólo
recta
si a está 1enla
polar de (0 : 1 : 1). Dicha recta polar tiene de ecuación
X0
0 0
2
(0 1 1) 0 −1 0
X1 = 0, es decir, X0 − 2X1 = 0. Por tanto, los puntos de C
1
0 0
X2
2
cuya tangente pasa por (0 : 1 : 1) son los puntos de intersección de dicha recta con la
cónica. Es un simple ejercicio ver que dichos puntos son (0 : 0 : 1) y (4 : 2 : 1), y sus
respectivas rectas tangentes son X0 = 0 y X0 − 4X1 + 4X2 = 0, que efectivamente pasan
por (0 : 1 : 1) (si uno tiene fe, puede ahorrarse el calcular las rectas tangentes, y calcular
directamente la recta por (0 : 0 : 1) y (0 : 1 : 1) y la recta por (4 : 2 : 1) y (0 : 1 : 1)).
Método 2) Según
4.4, el conjunto de rectas tangentes a C es una cónica
la Proposición
0 0 2
en P2k de matrix 0 −1 0 , es decir, la cónica de ecuación U12 − 4U0 U2 = 0. Por otra
2 0 0
∗
parte, el haz de rectas que pasan por el punto (0 : 1 : 1) ∈ P2k es la recta de P2k de ecuación
U1 + U2 = 0. Se calcula fácilmente que la cónica U12 − 4U0 U2 = 0 y la recta U1 + U2 = 0
∗
se cortan en los puntos (u0 : u1 : u2 ) = (1 : 0 : 0), (1 : −4 : 4) ∈ P2k , que son precisamente
las rectas X0 = 0 y X0 − 4X1 + 4X2 = 0 de P2k .
El siguiente ejemplo será ilustrativo de cómo las cónicas, al igual que las rectas, se
pueden parametrizar.
Ejemplo 4.8. Sea C la cónica de ecuación X0 X2 − X12 = 0 y tomemos el punto a =
(1 : 0 : 0) y la recta L : X0 = 0. Parametrizamos L de la forma (t0 : t1 ) → (0 : t0 : t1 ).
Una parametrización de la recta que pasa por (1 : 0 : 0) y (0 : t0 : t1 ) viene dada por (s0 :
33
s1 ) → (s0 : t0 s1 : t1 s1 ) (usamos como parámetros s0 , s1 , ya que t0 , t1 son los parámetros
de la recta L), que sustituida en la ecuación de la cónica nos da t1 s0 s1 − t20 s21 = 0, que
tiene como soluciones (s0 : s1 ) = (1 : 0) (que corresponde al punto a) y (s0 : s1 ) = (t20 : t1 ),
que sustituido en la parametrización nos da el punto (t20 : t0 t1 : t21 ). Tenemos pues una
biyeccción P1k → C definida por (t0 : t1 ) → (t20 : t0 t1 : t21 ).
Proposición 4.9. Sea C una cónica no degenerada y sean a ∈ C y L una recta que
no pasa por a. Sea φ : L → C la aplicación que asocia a cada p ∈ L el segundo punto
de intersección de la recta ap con C (si ap es la recta tangente a C entonces φ(p) = a).
Entonces, si ϕ : P1k → L es una parametización de L, la composición φ ◦ ϕ : P1k → C tiene
2
2
2
2
2
2
el aspecto
(t0 : t1 ) →
(c00 t0 + c01 t0 t1 + c02 t1 : c10 t0 + c11 t0 t1 + c12 t1 : c20 t0 + c21 t0 t1 + c22 t1 ),
c00 c01 c02 con c10 c11 c12 = 0.
c20 c21 c22 Demostración: Consiste en esencia en repetir las cuentas de la Proposición 4.2, pero sin
usar notación matricial (como ilustra el Ejemplo 4.8). Por simplificar, escribiremos la
parametrización ϕ como (t0 : t1 ) → (l0 : l1 : l2 ), donde l0 , l1 , l2 representan expresiones
lineales homogéneas en t0 , t1 . Una parametrización de la recta que pasa por a = (a0 : a1 :
a2 ) y (l0 : l1 : l2 ) será de la forma:
(s0 : s1 ) → (a0 s0 + l0 s1 : a1 s0 + l1 s1 : a2 s0 + l2 s1 )
que al sustituir en la ecuación de la cónica nos dará una expresión de la forma (teniendo
en cuenta que (a0 : a1 : a2 ) satisface la ecuación de la cónica, ver la demostración de la
Proposición 4.2):
ls0 s1 + qs21 = 0
donde l es una expresión lineal homogénea en t0 , t1 y q es una expresión cuadrática homogénea en t0 , t1 . Como la solución (s0 : s1 ) = (1 : 0) es la que nos da el punto a,
φ(l0 : l1 : l2 ) corresponderá a la solución (s0 : s1 ) = (q : −l), es decir,
φ(l0 : l1 : l2 ) = (q0 : q1 : q2 )
donde q0 , q1 , q2 son expresiones cuadráticas homogéneas en t0 , t1 . El resultado estará demostrado si vemos que q0 , q1 , q2 son formas linealmente independientes. Si no fuera ası́,
existirı́a una relación u0 q0 + u1 q1 + u2 q2 = 0, lo que implicarı́a que la cónica C estarı́a
contenida en la recta u0 X0 +u1 X1 +u2 X2 = 0, lo que es absurdo porque C (que contiene al
menos tres puntos, por estar en biyección con P1k ) no puede contener tres puntos alineados
(por el Corolario 4.3).
Definición. Llamaremos parametrización de una cónica C a una biyección
en la Proposición 4.9.
34
P1k → C como
P1k → P2k
de la forma (t0 : t1 ) →
c00 c01 c02 (c00 t20 +c01 t0 t1 +c02 t21 : c10 t20 +c11 t0 t1 +c12 t21 : c20 t20 +c21 t0 t1 +c22 t21 ), con c10 c11 c12 =
c20 c21 c22 0 es una cónica no degenerada que se puede transformar, mediante un cambio de coor2
denadas, en X0 X2 − X1 = 0. Como consecuencia, todas las cónicas no degeneradas con
algún punto son equivalentes entre sı́ (en el sentido de que se puede pasar de una a otra
por un cambio de coordenadas.
Proposición 4.10. La imagen de cualquier aplicación
Demostración:
La última afirmación es consecuencia inmediata de
la
laprimera por
t20
x0
Proposición 4.9. Sea pues el conjunto de puntos de coordenadas x1 = P t0 t1
x2
t21
c00 c01 c02
1
c10 c11 c12 . Haciendo el cambio de coordedonde (t0 : t1 ) varı́a en Pk y P =
c20 c21 c22
X0
X0
−1
X1 el conjunto será el constituido por los puntos de la forma
nadas X1 = P
X2
X2
2
(x0 : x1 : x2 ) = (t0 : t0 t1 : t21 ), que es precisamente (ver el Ejemplo 4.8) la cónica de
2
ecuación X0 X2 − X1 = 0. Deshaciendo el cambio de coordenadas, se obtiene que el
2
conjunto es una cónica (no degenerada, por serlo X0 X2 − X1 = 0).
Observación 4.11. El resultado anterior puede no resultar sorprendente, porque ya
sabemos que todas las cónicas complejas no degeneradas son equivalentes, y que las reales
no degeneradas con signatura (2,1) o (1,2) (como es la signatura de la cónica X0 X2 − X12 =
0) también son equivalentes. Sin embargo, es más sorprendente en otros cuerpos, por
ejemplo el de los racionales. En efecto, que sólo haya una clase de cónicas no imaginarias
no degeneradas en P2Q es en principio sorprendente, ya que hay infinitas clases de cónicas
imaginarias no degeneradas. Por ejemplo, puede demostrarse que no hay ningún cambio
de variable en P2Q que transforme la ecuación X02 + X12 + pX22 = 0 en X02 + X12 + p X22 = 0
si p y p son dos números primos distintos.
En la Proposición 4.9, en realidad la parametrización de la cónica viene dada por el
haz de rectas Ω(a), y no por la recta L que escogemos arbitrariamente (si lo hemos hecho
ası́ es sólo porque las cuentas salı́an más sencillas). En concreto, el resultado realmente
canónico serı́a:
Proposición 4.12. Sea C una cónica no degenerada, a un punto de C y ψ : Ω(a) → C
la aplicación que asocia a cada recta L que pasa por a el segundo punto de intersección
de L con C. Entonces para cualquier parametrización ϕ : P1k → Ω(a), la composición
ψ ◦ ϕ : P1k → C es una parametrización de C.
35
Demostración: Sea L una recta cualquiera que no pase por a y consideremos la proyectividad (ver Proposición 2.18) f : Ω(a) → L definida por L → L ∩ L. Entonces ψ = φ ◦ f ,
donde φ es la aplicación φ : L → C de la Proposición 4.9.
Si ϕ : P1k → Ω(a) es una parametrización de Ω(a), entonces, por ser f una proyectividad, se tendrá que f ◦ ϕ es una parametrización de L. Por tanto, por la Proposición 4.9,
φ ◦ f ◦ ϕ (es decir, ψ ◦ ϕ) es una parametrización de C.
Veamos ahora que, recı́procamente, toda parametrización de una cónica proviene de
la proyección desde un punto de ella, que además podemos tomar arbitrariamente.
Proposición 4.13. Sea C una cónica no degenerada y ϕ : P1k → C una parametrización
de C. Entonces, para cualquier a ∈ C, ϕ = ψ◦ϕ, donde ψ es la aplicación de la Proposición
4.12 y ϕ : P1k → Ω(a) es una parametrización de Ω(a).
Demostración: Escribimos ϕ : P1k → C de la forma (t0 : t1 ) → (q0 : q1 : q2 ), donde qi =
Qi (t0 , t1 ), siendo Q0 , Q1 , Q2 ∈ k[T0 , T1 ] formas cuadráticas homogéneas (independientes).
Necesitamos ver que ψ −1 ◦ ϕ es una parametrización ϕ de Ω(a), es decir, que tiene una
expresión lineal en t0 , t1 . La imagen de (t0 : t1 ) será la recta que pase por a = (a0 : a1 : a2 )
y (q0 : q1 : q2 ), es decir, la recta
X0 X1 X2 a0 a1 a2 = 0
q0 q1 q2 que es el punto de
P2k ∗ de coordenadas
(u0 : u1 : u2 ) = (a1 q2 − a2 q1 : a2 q0 − a0 q2 : a0 q1 − a1 q2 ).
Aunque esto parece indicar que la expresión queda de grado dos y no de grado uno, en
realidad no es ası́. En efecto, el punto a está en C, por lo que se podrá escribir
(a0 : a1 : a2 ) = (Q0 (s0 , s1 ) : Q1 (s0 , s1 ) : Q2 (s0 , s1 ))
para algún (s0 : s1 ) ∈ P1k , luego los polinomios a1 Q2 − a2 Q1 , a2 Q0 − a0 Q2 , a0 Q1 − a1 Q2
tienen a (s0 : s1 ) como raı́z. Por tanto, son divisibles por s1 T0 −s0 T1 (ver simultáneamente
a esta demostración el Ejemplo 4.14 siguiente para ilustrar este hecho) y podremos escribir
a1 Q2 − a2 Q1 = (s1 T0 − s0 T1 )A0
a2 Q0 − a0 Q2 = (s1 T0 − s0 T1 )A1
a0 Q1 − a1 Q0 = (s1 T0 − s0 T1 )A2
36
donde A0 , A1 , A2 ∈ k[T0 , T1 ] son formas lineales homogéneas. Es decir, cancelando el factor
común podemos escribir
(u0 : u1 : u2 ) = (A0 (t0 , t1 ) : A1 (t0 , t1 ) : A2 (t0 , t1 ))
que ahora ya representa una parametrización de Ω(a).
Ejemplo 4.14. Ilustramos la última parte de la demostración anterior con la cónica
C : X0 X2 − X12 = 0 con su parametrización (t0 : t1 ) → (t20 : t0 t1 : t21 ) (que además, por ser
todas las cónicas equivalentes a ésta por un cambio de variable, según la Proposición 4.10,
sirve en realidad para cualquier cónica). Tomamos el punto a = (s20 : s0 s1 : s21 ), y entonces
los coeficientes de la recta que pasa por a y (t20 : t0 t1 : t21 ) son
(u0 : u1 : u2 ) = (s0 s1 t21 − s21 t0 t1 : s21 t20 − s20 t21 : s20 t0 t1 − s0 s1 t20 ).
Efectivamente, todas las coordenadas son divisibles por s1 t0 − s0 t1 y, una vez eliminado el
factor común, queda
(u0 : u1 : u2 ) = (−s1 t1 : s1 t0 + s0 t1 : −s0 t0 ).
Ahora ya no hay indeterminación para el único valor conflictivo, (t0 : t1 ) = (s0 : s1 ), para
el que queda la recta de coeficientes (−s21 : 2s0 s1 : −s20 ), que es precisamente la recta
tangente a C en el punto a.
Corolario 4.15. Si ϕ, ϕ : P1k → C son dos parametrizaciones distintas de una cónica no
degenerada C, entonces ϕ = ϕ ◦ α, donde α : P1k → P1k es un cambio de variable en P1k .
Demostración: Sea ψ : Ω(a) → C la aplicación de la Proposición 4.12. Entonces, por
la Proposición 4.13, ψ −1 ϕ y ψ −1 ϕ son parametrizaciones de Ω(a). Por el Lema 2.16,
se tendrá que ψ −1 ϕ = ψ −1 ϕα, donde α : P1k → P1k es un cambio de variable en P1k .
Componiendo a la izquierda con ψ se concluye el resultado.
Corolario 4.16 (Teorema de Chasles). Sea C una cónica no degenerada y sean a, a ∈ C.
Consideramos la aplicación f : Ω(a) → Ω(a ) que asocia a cada recta L que pasa por a la
recta generada por a y el punto de intersección de L con C distinto de a (entendiendo que
cuando L es tangente a C se define f (L) = aa , y que además f (aa ) es la recta tangente
a C en a ). Entonces f es una proyectividad.
Demostración: Sean ψ : Ω(a) → C y ψ : Ω(a ) → C las aplicaciones definidas en la
−1
Proposición 4.12. Entonces f = ψ ◦ ψ. Sea ϕ : P1k → C una parametrización cualquiera.
37
Por la Proposición 4.13 se tiene que ψ −1 ϕ y ψ −1 ϕ son parametrizaciones de Ω(a). Como
ψ −1 ϕ = f ◦ ψ −1 ϕ, se sigue que f es una proyectividad (ver Lema 2.17(i)).
Observación 4.17. El corolario anterior indica que, dada una cónica no degenerada
C y cuatro puntos a, b, c, d sobre ella, se puede definir su razón doble: basta escoger un
punto p ∈ C y considerar la razón doble de las rectas pa, pb, pc, pd (ver la Observación
3.10). Esta definición no depende de la elección del punto p, ya que el Corolario 4.16
implica que, escogiendo otro punto p, tenemos una proyectividad f : Ω(p) → Ω(p ) tal
que f (pa) = p a, f (pb) = p b, f (pc) = p c, f (pd) = p d, y por el Teorema 3.4 se tendrá
[pa, pb, pc, pd] = [p a, p b, p c, pd ].
El teorema de Chasles está diciendo que, dada una cónica no degenerada, sus puntos
se pueden obtener de la siguiente forma: fijamos dos puntos a, a de la cónica y tomamos
la proyectividad f : Ω(a) → Ω(a ) del Corolario 4.16 (que verifica f (aa ) = aa ); entonces
la cónica es el conjunto de las intersecciones L ∩ f (L) cuando L varı́a en Ω(a). El siguiente
resultado afirma que una construcción general de esta forma produce siempre una cónica
no degenerada:
Teorema 4.18 (Construcción de Steiner). Sean a, a ∈ P2k dos puntos distintos y sea
f : Ω(a) → Ω(a ) una proyectividad tal que f (aa ) = aa . Entonces el conjunto C =
{L ∩ f (L) | L ∈ Ω(a)} es una cónica no degenerada que pasa por a y a .
Demostración: Sea ϕ : P1k → Ω(a) una parametrización definida por
(t0 : t1 ) → (u0 : u1 : u2 ) = (l0 , l1 : l2 ),
donde l0 , l1 , l2 son expresiones lineales homogéneas en t0 , t1 . Como f es una proyectividad,
f ◦ ϕ es una parametrización de Ω(a ), que tendrá por tanto el aspecto
(t0 : t1 ) → (u0 : u1 : u2 ) = (l0 , l1 : l2 ),
donde l0 , l1 , l2 son de nuevo expresiones lineales homogéneas en t0 , t1 . El conjunto C será
entonces el conjunto de puntos de intersección de las rectas
l 0 X 0 + l1 X1 + l2 X 2 = 0
l0 X0 + l1 X1 + l2 X2 = 0
cuando (t0 : t1 ) varı́a en
P1k .
Por tanto, C estará parametrizado de la forma
(t0 : t1 ) → (l1 l2 − l2 l1 : l2 l0 − l0 l2 : l0 l1 − l1 l0 ).
38
Por la Proposición 4.10, el teorema estará demostrado si demostramos que las expresiones
cuadráticas homogéneas l1 l2 − l2 l1 , l2 l0 − l0 l2 , l0 l1 − l1 l0 son linealmente independientes.
Supongamos por tanto que no lo fueran. Eso querrı́a decir que el conjunto C estarı́a
contenido en una recta L0 . Es decir, para cada L ∈ Ω(a) se tendrı́a que L ∩ f (L) es un
punto de la recta L0 . En otras palabras, tendrı́amos una proyectividad entre dos rectas
∗
∗
de P2k tal que la recta entre cada punto y su imagen pasa siempre por el punto L0 ∈ P2k ,
con lo que f serı́a una perspectividad de centro L0 . Sin embargo esto es absurdo, porque
la imagen de aa (que es la intersección de Ω(a) y Ω(a )) no es aa .
Observación 4.19. Nótese que, si en la construcción de Steiner quitamos la condición
f (aa ) = aa , se tiene que la intersección L ∩ f (L) es siempre un punto excepto en el
caso L = aa , en que la intersección es toda aa . Además, como se observa al final de
∗
la demostración del Teorema 4.18, f : Ω(a) → Ω(a ) serı́a una perspectividad en P2k , es
decir, existirı́a una recta L0 tal que f (L) serı́a la recta generada por a y L ∩ L0 . Se tendrı́a
entonces que C serı́a la unión de L0 y aa .
Teorema 4.20. Sean p1 , p2 , p3 , p4 , p5 ∈ P2k cinco puntos distintos de modo que no hay
tres entre ellos alineados. Entonces existe una única cónica que pasa por ellos, que además
es no degenerada.
Demostración: Claramente, cualquier cónica que pase por los cinco puntos es no degenerada, ya que en caso contrario la cónica deberı́a ser o un par de rectas o una recta doble,
y en cualquiera de los dos casos necesariamente tres de los cinco puntos estarı́an en una
recta, en contra de nuestra hipótesis. Por otra parte, por el teorema de Chasles (Corolario
4.16), si C es una cónica no degenerada que pasa por p1 , p2 , p3 , p4 , p5 , entonces existe una
proyectividad f : Ω(p1 ) → Ω(p2 ) tal que f (p1 p3 ) = p2 p3 , f (p1 p4 ) = p2 p4 , f (p1 p5 ) = p2 p5 y
C = {L ∩ f (L) | L ∈ Ω(p1 )}. Como f está determinada por la imagen de p1 p3 , p1 p4 , p1 p5 ,
se tiene que sólo existe una posibilidad para f y por tanto una única C posible. Por otra
parte, la construcción de Steiner nos dice que tal construcción nos da una cónica (o un par
de rectas, según la Observación 4.19). Como claramente C definida de ese modo contiene
a p1 , p2 , p3 , p4 , p5 , es claro que C es una cónica no degenerada.
Teorema 4.21. Sea C una cónica no degenerada y L una recta que corta a C en dos puntos
distintos a, b. Entonces, para cada punto c ∈ L \ {a, b}, si c es el punto de intersección de
L con la recta polar de c respecto de C, se tiene [a, b, c, c ] = −1.
Demostración: Sea L la recta polar de c respecto de C y sean p1 , p2 los puntos de
intersección de L con C.
39
b
p1
d
a
p2
c
Por la Observación 3.10, [a, b, c, c ] = [p1 a, p1 b, p1 c, p1 c ], mientras que por la Observación 4.17, [p1 a, p1 b, p1 c, p1 c ] = [a, b, p1 , p2 ], con lo que se tiene [a, b, c, c ] = [a, b, p1 , p2 ].
Análogamente, cambiando el papel de p1 por p2 se tendrá [a, b, c, c ] = [a, b, p2 , p1 ], que,
1
por la Observación 3.9, es [a,b,p11 ,p2 ] . Por tanto, [a, b, c, c ] = [a,b,c,c
] , de donde se deduce
(teniendo en cuenta que la razón doble de cuatro puntos distintos es distinta de uno) que
[a, b, c, c ] = −1.
40
5. Cónicas afines y euclı́deas
En este capı́tulo redemostraremos la clasifición de cónicas afines y euclı́deas a partir
de sus completados proyectivos. Empezaremos con las cónicas afines reales, iniciando por
los casos más sencillos de completado proyectivo.
Proposición 5.1. Sea C ∈ A2k una cónica afı́n tal que su completado proyectivo es una
recta doble. Entonces C es una recta doble.
Demostración: Es inmediato: si el completado proyectivo tiene ecuación (a0 X0 + a1 X1 +
a2 X2 )2 = 0, entonces C es la recta doble de ecuación (a0 + a1 X + a2 Y )2 = 0.
Proposición 5.2. Sea C ∈ A2k una cónica afı́n tal que su completado proyectivo C̄ es una
par de rectas no imaginarias (resp. imaginarias conjugadas). Entonces se da uno de los
siguientes casos:
(i) La interscción de C̄ y la recta del infinito consiste en dos puntos no imaginarios
(resp. imaginarios) distintos y entonces C consiste en un par de rectas secantes no
imaginarias (resp. imaginarias conjugadas).
(ii) La interscción de C̄ y la recta del infinito consiste un solo punto no imaginario (resp.
imaginario) distintos y entonces C consiste en un par de rectas paralelas no imaginarias
(resp. imaginarias conjugadas).
Demostración: Si la ecuación de C̄ es (a0 X0 + a1 X1 + a2 X2 )(b0 X0 + b1 X1 + b2 X2 ) = 0,
entonces la ecuación de C es (a0 + a1 X + a2 Y )(b0 + b1 X + b2 Y ) = 0, que es la unión de
dos rectas. La intersección de C̄ con la recta del infinito son los puntos (0 : a2 : −a1 )
y (0 : b2 : −b1 ), que corresponden a los vectores directores de las rectas. Entonces la
intersección con la recta del infinito será un solo punto si y sólo si las rectas son paralelas.
Para estudiar cónicas no degeneradas necesitaremos hacer cambios de coordenadas.
Recuérdese que un cambio de coordenadas afı́n tiene el aspecto
1
1 0 0
1
X = α a b X
Y
β c d
Y
a b
= 0 con lo que se puede extender a un cambio de coordenadas en P2 de la
con k
c d
forma
1 0 0
X0
X0
X1 = α a b X1 .
(5.3)
X2
X2
β c d
41
Definición. Se llama completado proyectivo de un cambio de coordenadas afı́n a un cambio
de coordenadas en P2k como el anterior.
Lema 5.4. Un cambio de coordenadas en P2k es el completado proyectivo de un cambio
afı́n de coordenadas si y sólo si manda la recta del infinito a X0 = 0. Además, cualquier
proyectividad de la recta del infinito en sı́ misma se puede ver como la restricción del
completado proyectivo de un cambio de coordenadas afı́n.
Demostración: Claramente, un cambio de coordenadas de la forma (5.3) manda la recta
del infinito a X0 = 0. Concretamente, se tiene la expresión
(0 : X1 : X2 ) = (0 : aX1 + bX2 : cX1 + dX2 )
que claramente define una proyectividad de la recta del infinito en sı́ misma. Recı́procamente, si tenemos un cambio de coordenadas de P2k
X0
p00
X1 = p10
X2
p20
p01
p11
p21
p02
X0
p12 X1
p22
X2
si la recta del infinito va a parar a X0 = 0, en particular ocurrirá que los puntos (0 : 1 : 0)
y (0 : 0 : 1), que en las nuevas coordenadas son respectivamente (p01 : p11 : p21 ) y (p02 :
p12 : p22 ) deben tener la primera
es decir p01 = p02 = 0. Por tratarse
coordenada cero,
p00 0
0
p11 p12 = 0.
de un cambio de coordenadas, p10 p11 p12 = 0, es decir, p00 = 0 y p
p
21
22
p20 p21 p22 Dividiendo entonces por p00 , el cambio de coordenadas queda de la forma
1
X0
X1 = pp10
01
p20
X2
p01
p11 p12
p01
con pp01
p22
21
p01
p01
nadas afı́n.
0
0
p11
p01
p21
p01
p12
p01
p22
p01
X0
X1
X2
= 0, que es por tanto el completado proyectivo de un cambio de coorde
Por otra parte, cualquier proyectividad de la recta del
infinito
se puede escribir de la
a b
= 0, con lo que viene de
forma (0 : X1 : X2 ) → (0 : aX1 + bX2 : cX1 + dX2 ), con c d
un cambio de coordenadas como (5.3) (que claramente no es único).
Teorema 5.5. Sea C ∈ A2R una cónica afı́n tal que su completado proyectivo C̄ es una
cónica no degenerada real. Entonces:
42
(i) Si C̄ corta a la recta del infinito en un solo punto (es decir, si es tangente a la recta
del infinito), C es una parábola.
(ii) Si C̄ corta a la recta del infinito en dos puntos reales distintos, entonces C es una
hipérbola.
(iii) Si C̄ corta a la recta del infinito en dos puntos imaginarios, entonces C es una elipse
real.
Demostración: En el caso (i), por el Teorema 2.20, podemos encontrar una proyectividad
de la recta del infinito en sı́ misma que mande su punto de intersección con C̄ al punto
(0 : 0 : 1), luego por el Lema 5.4 existe un cambio de coordenadas afı́n tal que el punto
del infinito de C es la dirección vertical (y la recta tangente en ese punto es la recta del
infinito). Eso quiere decir que la ecuación de la cónica en las nuevas coordenadas tiene el
aspecto aX 2 + bX + cY + d = 0. Como C̄ es no degenerada, c = 0, con lo que la ecuación
se puede escribir de la forma Y = − ac X 2 − cb X − dc , que claramente es la ecuación de
una parábola.
En el caso (ii), tomamos una proyectividad de la recta del infinito en sı́ misma que
mande sus puntos de intersección con C̄ a (0 : 1 : 0) y (0 : 0 : 1). Usando otra vez el
Lema 5.4, tendremos un cambio de coordenadas afı́n tal que los puntos del infinito de C
serán el horizontal y el vertical, es decir, que en las nuevas coordenadas
de
tendrá
ecuación
d b c 2
2 aX Y + bX + cY + d con a = 0 y, por ser C̄ no degenerada, 2b 0 a2 = 0, i.e.
c a 0
2
2
a(bc − ad) = 0. Dividiendo por a, la ecuación se puede escribir como (X + ab )(Y + ac ) =
bc−ad
a2 , que claramente corresponde a una hipérbola.
En el caso (iii), por la Proposición 3.7 podemos construir una proyectividad de la
recta del infinito que mande sus puntos de intersección con C̄ a los puntos (0 : 1 : i) y
(0 : 1 : −i) y, como en los casos anteriores, extenderlas al completado proyectivo de un
cambio de coordenadas afı́n. Como consecuencia, en
las nuevas
coordenadas, C tendrá
c a2 2b
ecuación X 2 + Y 2 + aX + bY + c = 0, donde la matriz a2 1 0 tiene signatura (2, 1)
b
01
2
1 0
(no puede tener signatura (1, 2), porque la submatriz diagonal
tiene ya signatura
0 1
2
2
(2, 0)). Por tanto, su determinante c − a4 − b4 es negativo. La ecuación es equivalente a
2
2
2
2
(X +a)2 +(Y +b)2 +(c− a4 − b4 ) = 0, que representa una elipse real, ya que c− a4 − b4 < 0.
Finalmente, estudiamos la cónicas no degeneradas imaginarias:
43
Proposición 5.6. Sea C una cónica afı́n tal que C̄ es una cónica no degenerada imaginaria. Entonces C es una elipse imaginaria.
Demostración: Como C̄ es imaginaria, su intersección con la recta del infinito son dos
puntos imaginarios conjugados. Como en la demostración del caso (iii) del teorema
anterior, podemos encontrar un cambio afı́n de coordenadas tal que C tenga
ecuación
c a2 2b
2
2
(X + a)2 + (Y + b)2 + (c − a4 − b4 ) = 0. La diferencia es que ahora la matriz a2 1 0
b
0 1
2
a2
b2
tiene signatura (3, 0), luego determinante c − 4 − 4 positivo, con lo que la ecuación
representa una elipse imaginaria.
Obsérvese que, para cada una de las posibilidades de C̄ y su intersección con la recta
del infinito, nos han salido tipos de cónicas que no son afı́nmente equivalentes. Esto nos
da una clasificación completa de las cónicas afines reales, que resumimos en la siguiente
tabla:
Clasificación de cónicas en A2R
Tipo de cónica C
Tipo de C̄
C̄ ∩ {X0 = 0}
Hipérbola
No degenerada real
Dos puntos reales
Parábola
No degenerada real
Un puntos real
Elipse real
No degenerada real
Dos puntos imaginarios
Elipse imaginaria
No degenerada imaginaria
Dos puntos imaginarios
Par de rectas reales secantes
Par de rectas reales
Dos puntos reales
Par de rectas reales paralelas
Par de rectas reales
Un punto real
Par de rectas imaginarias
Dos puntos imaginarios
Par de rectas imaginarias
Un punto real
Recta doble
Un punto real
Par de rectas imaginarias
conjugadas secantes
Par de rectas imaginarias
conjugadas paralelas
Recta doble
Obsérvese que la clasificación de cónicas afines complejas consiste en la anterior quitando todos los casos imaginarios, quedando por tanto como posibilidades la hipérbola, la
parábola, el par de rectas secantes, el par de rectas paralelas y la recta doble. En general,
para cónicas afines sobre cualquier cuerpo k, seguiremos usando el nombre elipse, parábola,
44
etc. de acuerdo con la tabla anterior, según cómo sea C̄ y su intersección con la recta del
infinito.
Ejemplo 5.7. Fijémonos por un instante en el caso de la hipérbola. En la ecuación reducida que hemos obtenido en la demostración del Teorema 5.5, está claro que las ası́ntotas
son X + ab = 0 e Y + ac = 0 después del cambio de coordenadas. Una pregunta natural
es si se pueden calcular sin hacer el cambio de coordenadas. En estas nuevas coordenadas,
el completado proyectivo C̄ tiene ecuaciones
d
(X0 X1 X2 ) 2b
c
2
b
2
0
a
2
X0
X1 = 0
X2
0
c
2
a
2
de donde se obtiene que las tangentes a C̄ en sus puntos del infinito (0 : 1 : 0) y (0 : 0 : 1)
son respectivamente las rectas 2b X0 + a2 X2 = 0 y 2c X0 + a2 X1 = 0, que son precisamente
los completados proyectivos de las ası́ntotas. Esto motiva la siguiente:
Definición. Dada una cónica afı́n no degenerada C en A2k tal que su completado corta a
la recta del infinito en dos puntos distintos, llamaremos ası́ntotas de la cónica a la parte
afı́n de las tangentes a C̄ en los puntos del infinito.
Obsérvese que estamos excluyendo el caso de la parábola, en que hay un solo punto en
el infinito, cuya recta tangente es la propia recta del infinito, por lo que no tiene parte afı́n.
Estamos admitiendo también la existencia de ası́ntotas en el caso de la elipse (imaginaria
o no), pero en tal caso serán dos rectas imaginarias. Obsérvese que, sin embargo, estas
dos rectas imaginarias se cortan en un punto no imaginario. En efecto, si p1 , p2 son los
dos puntos del infinito de C (imaginarios o no), las tangentes a C̄ en p1 y p2 son las rectas
polares de dichos puntos, con lo que su intersección será el polo de la recta p1 p2 , es decir,
de la recta del infinito (ver la Proposición 4.6(v)), que no es imaginario. Esto motiva de
nuevo otra definición.
Definición. Se llama centro de una cónica afı́n no degenerada al polo de la recta del
infinito. Una cónica cuyo centro sea un punto afı́n (es decir, que no sea una parábola) se
llama cónica con centro.
Pasamos ahora a estudiar las cónicas euclı́deas. Toda cónica euclı́dea es una cónica
afı́n, luego una primera aproximación es la clasificación que ya tenemos de las cónicas
afines. Sin embargo, necesitamos una clasificación un poco más fina, en el sentido de
que dos cónicas afı́nmente equivalentes no son necesariamente equivalentes como cónicas
euclı́deas. Por ejemplo, en el plano afı́n las cónicas X 2 + Y 2 = 1 y X 2 + 4Y 2 = 1 son
equivalentes, porque el cambio de coordenadas (X, Y ) = (X , 2Y ) permite pasar de una a
45
otra. Sin embargo, como cónicas euclı́deas no son equivalentes, porque mientras la primera
es una circunferencia (en concreto el conjunto de puntos que distan uno de (0, 0)) la segunda
no lo es, y cualquier transformación euclı́dea deberı́a conservar las distancias. De hecho,
los únicos cambios de coordenadas permitidos en el plano euclı́deo son las isometrı́as, que
tienen la forma
1 0 0
1
1
X = α a b X
Y
β c d
Y
a b
a b
a c
1 0
con
una matriz ortogonal, es decir
=
. Dependiendo
c d
c d
b d
0 1
del signo del determinante (que necesariamente es ±1), se da uno de los siguientes casos
a b
cos θ − sen θ
=
(isometrı́a directa)
c d
sen θ
cos θ
a b
cos θ
sen θ
=
(isometrı́a inversa)
c d
sen θ − cos θ
Como una circunferencia está caracterizada por ser una elipse real que corta a la
recta del infinito en los puntos cı́clicos (0 : 1 : i), (0 : 1 : −i), podrı́a pensarse que las
los completados proyectivos de isometrı́as se caracterizan por preservar los puntos cı́clicos.
Dicha afirmación es cierta sólo a medias:
Proposición 5.8. Un cambio de coordenadas en P2R deja invariantes las coordenadas del
conjunto {(0 : 1 : i), (0 : 1 : −i)} de los puntos cı́clicos si y sólo si es el completado
proyectivo de la composición de una homotecia y una isometrı́a. Además, dicha isometrı́a
es directa si y sólo si quedan fijas las coordenadas de cada uno de los puntos cı́clicos, y
es inversa si las permuta. Finalmente, cualquier proyectividad de la recta del infinito que
deje invariantes las coordenadas del conjunto {(0 : 1 : i), (0 : 1 : −i)} es restricción del
completado proyectivo de un cambio de coordenadas isométrico.
Demostración: En primer lugar, una homotecia
1
1 0
X = α λ
Y
β 0
tiene de ecuaciones
0
1
0X
λ
Y
y su completado proyectivo claramente conserva las coordenadas de cada punto de la
recta del infinito (ya que las multiplica todas por la constante λ). Por otra parte, es una
simple comprobación que el completado proyectivo de una isometrı́a directas deja fijas las
coordenadas de los puntos cı́clicos, mientras que el de una inversa las intercambia.
Recı́procamente, supongamos que un cambio de coordenadas de P2 conserva las coordenadas del conjunto de los puntos cı́clicos. Esto implica en primer lugar que manda
46
la recta del infinito a la recta X0 = 0, con lo que (por el Lema 5.4) es el completado
proyectivo de un cambio afı́n de coordenadas, es decir, será de la forma
1
X0
X1 = α
X2
β
0 0
X0
a b X1
X2
c d
a b
= 0. Las nuevas coordenadas de (0 : 1 : i) y (0 : 1 : −i) serán respectivamente
con c d
(0 : a + bi : c + di) y (0 : a − bi : c − di).
Si por ejemplo (0 : a + bi : c + di) = (0 : 1 : i)
y (0 : a − bi : c − di) = (0 : 1 : −i),
a − bi c − di a + bi c + di , de donde se deduce d = a, b = −c.
= 0 = se tendrá 1
−i 1
i Escribiendo √a2a+c2 = cos θ, √a2c+c2 = sen θ, tendremos
1
α
β
0 0
1
a b = α
c d
β
0
cos θ
sen θ
0
1
− sen θ
0
0
cos θ
√ 0
a2 + c2
0
0
√ 0
2
2
a +c
que representa la composición de una homotecia y una isometrı́a directa.
Si en cambio (0 : a + bi : c + di) = (0 : 1 : −i) y (0 : a − bi : c − di) = (0 : 1 : i), se
a + bi c + di = 0 = a − bi c − di , de donde se deduce ahora d = −a, b = c.
tendrá 1
1
−i i a
c
Escribiendo de nuevo √a2 +c2 = cos θ, √a2 +c2 = sen θ, tendremos
1
α
β
0 0
1
a b = α
c d
β
0
cos θ
sen θ
0
1
sen θ
0
0
− cos θ
√ 0
a2 + c2
0
0
√ 0
2
2
a +c
que representa ahora la composición de una homotecia y una isometrı́a inversa.
Finalmente, dada una proyectividad (0 : X1 : X2 ) → (0 : aX1 + bX2 : cX1 + bX2 ) de
la recta del infinito que deje invariantes las coordenadas del conjunto de puntos cı́clicos,
√
acabamos de ver que (después de dividir por a2 + c2 ), se escribe como
(0 : X1 : X2 ) → (0 : cos θX1 − sen θX2 : sen θX1 + cos θX2 )
si deja fijos ambos puntos cı́clicos o bien como
(0 : X1 : X2 ) → (0 : cos θX1 + sen θX2 : sen θX1 − cos θX2 )
si los intercambia, con lo que es siempre restricción del completado proyectivo de una
isometrı́a.
47
Definición. Se llama semejanza a la composición de una homotecia y una isometrı́a. Se
dirá que es directa o inversa según lo sea la isometrı́a.
El resultado anterior está diciendo que con la geometrı́a proyectiva, más que geometrı́a
euclı́dea (la que conserva distancias, es decir, las formas y tamaños), podemos sólo hacer
geometrı́a conforme (la que conserva las formas, pero no necesariamente los tamaños).
Este hecho se manifiesta explı́citamente en el siguiente resultado, que muestra de nuevo el
papel fundamental que juegan los puntos cı́clicos.
Proposición 5.9. Sean v = (0 : v1 : v2 ), w = (0 : w1 : w2 ) dos puntos del infinito del
plano euclı́deo E2 . Si I = (0 : 1 : i), J = (0 : 1 : −i) son los puntos cı́clicos, entonces
[I, J, v, w] = cos 2θ + i sen 2θ, donde θ es el ángulo que va del vector w
= (w1 , w2 ) al vector
v = (v1 , v2 ) en el sentido antihorario. En particular, las direcciones representadas por v y
w son perpendiculares si y sólo si [I, J, v, w] = −1.
Demostración: Por el Lema
1 v1 1
i v2 −i
[I, J, u, v] = 1
1
w
1
i w2 −i
3.1, se tiene
2
w1 √ v22 2 − i √ v21 2
w2
v1 +v2
(v − iv1 )(w2 + iw1 ) v1 +v2
.
= 2
=
w
√ 2 2 2 − i √ w2 1 2
(w2 − iw1 )(v2 + iv1 )
v1 w1 +w2
w1 +w2
v2 Ahora bien, los vectores v y w
se pueden ver en el plano de los números complejos como v =
= w1 + iw2 , y en tal caso sus vectores normalizados (de módulo uno) y girados
v1 + iv2 y w
noventa grados en el sentido de las agujas del reloj son precisamente √ v22 2 − i √ v21 2 y
√
w2
w12 +w22
− i√
w1
.
w12 +w22
v1 +v2
v1 +v2
Por tanto, el ángulo del segundo al primero en sentido antihorario
√ v22
es también θ, de donde se sigue √
v +v 2
1
2
w2
w2 +w2
1
2
−i √
−i √
v1
v 2 +v 2
1
2
w1
= cos θ + i sen θ = eiθ , lo que implica el
w2 +w2
1
2
resultado.
Obsérvese que en el enunciado anterior no hay indefinición, ya que si cambiamos de
sentido uno de los vectores v o w,
entonces θ varı́a en 180 grados, con lo que su doble es
el mismo (módulo 360 grados).
Observación 5.10. El resultado anterior interpreta entonces lo que son las semejanzas:
si son directas, I, J quedan fijos y, al conservarse la razón doble, se preservan los ángulos;
si son inversas, se intercambian I y J, luego por la Observación 3.9 invierte la razón doble,
que al ser un número complejo de módulo uno nos da el conjugado, luego cambia el sentido
de los ángulos.
Veamos también lo que podemos decir sobre la razón doble de los puntos cı́clicos y
dos puntos imaginarios conjugados.
48
Lema 5.11. Sean, p, p̄ dos puntos imaginarios conjugados de la recta del infinito, distintos
de los puntos cı́clicos. Entonces, [I, J, p, p̄] es un número real positivo. Además, existe
λ ∈ R \ {0, 1} tal que, si llamamos q = (0 : 1 : λi), entonces [I, J, p, p̄] = [I, J, q, q̄].
Demostración: La manera más rápida, aunque poco elegante, es por medio de un simple
cálculo. Por simplificar, como p no es real, su coordenada X1 no es cero (porque si no serı́a
el punto (0 : 0 : 1)), ası́ que podemos escribir p = (0 : 1 : a + bi), con a, b ∈ R y b = 0. Es
entonces un simple cálculo que
1
1
1
1
i a + bi −i a − bi (a + (b − 1)i)(a − (b − 1)i)
a2 + (b − 1)2
=
=
[I, J, p, p̄] = (a − (b + 1)i)(a + (b + 1)i)
a2 + (b + 1)2
1 1
1 1
i a − bi −i a + bi que claramente es un número positivo. Por tanto, podemos escribir [I, J, p, p̄] = µ2 para
algún µ > 0 (además, µ = 1). Las mismas cuentas que acabamos de hacer muestran que,
2
tomando q = (0 : 1 : λi), se tiene [I, J, q, q̄] = λ−1
, con lo que basta encontrar un λ ∈ R
λ+1
tal que µ =
λ−1
λ+1 ,
y claramente basta tomar λ =
1+µ
1−µ .
Con todo esto, ya podemos ir estudiando los distintos tipos de cónicas euclı́deas.
Proposición 5.12. Toda parábola euclı́dea se puede escribir, después de una cambio de
coordenadas isométrico de la forma Y = aX 2 para un único a > 0.
Demostración: Si p es el punto del infinito de la parábola, por la Proposición 3.7 existe una
proyectividad de la recta del infinito en sı́ misma que deja fijos los puntos cı́clicos y manda
p al punto (0 : 1 : 0), por lo que por la Proposición 5.8 existe un cambio de coordenadas
isométrico tal que la nueva ecuación de la parábola será de la forma (haciendo las mismas
cuentas que en la demostración del Teorema 5.5) Y = aX 2 + bX + c con a = 0. Además,
cambiando Y por −Y si fuera necesario, podemos suponer a > 0. La ecuación anterior es
2
4b2
2b 2
2b
equivalente a Y −c+ 4b
a2 = a(X + a ) , con lo que llamando X = X + a , Y = Y −c+ a2
(que es una traslación y por tanto una isometrı́a) se tiene la ecuación buscada. Como en
estas últimas coordenadas la parábola representa el conjunto de puntos que equidistan del
1
1
punto de la recta Y = − 4a
y del punto (0, 4a
), el valor a está unı́vocamente determinado
a partir de la parábola, ya que la distancia del punto a la recta, que permanece fijo por
1
.
isometrı́as, es 2a
Proposición 5.13. Toda hipérbola euclı́dea se puede escribir, después de un cambio de
2
2
coordenadas isométrico de la forma Xa2 − Yb2 = 1 para unos únicos a, b > 0.
Demostración: Sean v, w los puntos del infinito de la hipérbola, y sea cos 2θ + i sen 2θ la
razón doble [I, J, v, w] (ver la Proposición 5.9). Si llamamos v = (0 : cos θ2 : sen θ2 ), w =
49
(0 : cos θ2 : − sen θ2 ), también se tiene que [I, J, v , w ] = cos 2θ + i sen 2θ, por lo que
existe una proyectividad de la recta del infinito en sı́ misma que manda respectivamente
I, J, v, w a I, J, v , w , y por la Proposición 3.7 será una proyectividad real. Por tanto,
por la Proposición 5.8 existe un cambio de coordenadas isométrico tal que los puntos del
infinito de la hipérbola tendrán coordenadas (0 : cos θ2 : sen θ2 ), (0 : cos θ2 : − sen θ2 ), lo que
implica que la ecuación se puede escribir como sen2 θ2 X 2 − cos2 θ2 Y 2 + cX + dY + e = 0.
Mediante la traslación (X , Y ) = (X + 2 senc 2 θ , Y − 2 cosd 2 θ ) obtenemos una ecuación de
2
2
la forma sen2 θ2 X 2 − cos2 θ2 Y 2 + e = 0 (con e = 0, ya que se trata de una hipérbola).
Podemos suponer e < 0 (si fuera e > 0, intercambiamos X e Y y cambiamos θ por
θ + π), y escribiendo sene 2 θ = a2 , cose2 θ = b2 obtenemos la ecuación reducida buscada.
En estas coordenadas, la hipérbola consiste en los puntos tales que la diferencia de las
√
√
distancias a los puntos (− a2 + b2 , 0) y ( a2 + b2 , 0) es, en valor absoluto, igual a 2a. Por
√
tanto, 2a depende de las propiedades métricas de la hipérbola, ası́ como 2 a2 + b2 , que es la
√
√
distancia entre los puntos (− a2 + b2 , 0) y ( a2 + b2 , 0). Como consecuencia, a y b están
determinados unı́vocamente por la hipérbola, independientemente de las coordenadas.
Proposición 5.14. Toda elipse euclı́dea real se puede escribir, después de un cambio de
2
2
coordenadas euclı́deo, de la forma Xa2 + Yb2 = 1 para unos únicos a ≥ b > 0.
Demostración: Como en los casos anteriores, y usando ahora el Lema 5.11, podemos hacer
una cambio de coordenadas euclı́deo tal que los puntos del infinito de la elipse sean de la
forma (0 : 1 : λi), (0 : 1 : −λi) para algún λ = 0 (si los puntos del infinito de la elipse son
los puntos cı́clicos, no hay que hacer cambio de coordenadas, y tendremos λ = 1. Es decir,
que podemos escribir la ecuación de la elipse como λ2 X 2 + Y 2 + a X + b Y + c = 0.
a
, Y + b2 ), la ecuación tendrá el aspecto
Después de una traslación (X , Y ) = (X + 2λ
λ2 X 2 + Y 2 + e = 0,para algún e ∈ R, que necesariamente es negativo por ser la elipse
√
,
b
=
−e tendremos la ecuación buscada (si fuera a < b, basta
real. Escribiendo a = −e
2
λ
girar 90 grados o intercambiar X e Y ).
En estas coordenadas, la elipse consiste en los puntos tales que la suma de las distancias
√
√
a los puntos (− a2 − b2 , 0) y ( a2 − b2 , 0) es igual a 2a. Como en el caso de la hipérbola,
√
2a y 2 a2 − b2 , y por tanto a y b están determinados unı́vocamente por las propiedades
métricas de la elipse, y por tanto no dependen de las coordenadas.
Observación 5.15. Se deja como ejercicio para el lector que, en el caso de las demás
cónicas euclı́deas, la ecuación reducida queda:
–Elipse imaginaria:
X 2
a2
+
Y 2
b2
= −1 para unos únicos a ≥ b > 0.
–Par de rectas reales secantes: sen2 θ2 X 2 − cos2 θ2 Y 2 = 0, donde θ es el ángulo entre
las dos rectas.
50
–Par de rectas imaginarias secantes: λ2 X 2 + Y 2 = 0, para un único λ > 0.
–Par de rectas reales paralelas: X 2 = a2 , donde 2a es la distancia entre las dos rectas.
–Par de rectas imaginarias paralelas: X 2 = −a2 , para un único a > 0.
–Recta doble: X 2 = 0.
Finalmente, ya que los puntos cı́clicos juegan un factor importante en la geometrı́a
euclı́dea, también lo deben jugar sus rectas polares respecto del completado proyectivo de
la cónica:
Definición. Dada una cónica euclı́dea no degenerada C, si L1 , L2 son las tangentes a C̄
que pasan por I, y M1 , M2 son las rectas tangentes a C̄ que pasan por J, se llaman focos
de la cónica a los puntos afines de intersección de cada Li con cada Mj .
Veamos cuáles son los focos de los distintos tipos de cónicas euclı́deas reales (con la
ecuación ya reducida):
–Si C es la hipérbola
X2
a2
−
Y2
b2
= 1, entonces la recta polar a (0 : 1 : ±i) respecto
X2
X2
iX2
2
1
1
2
de C̄ es X
a2 = ± b2 , que√interseca a C̄ (de ecuación a2 − b2 = X0 ) en los puntos
√
(− a2 + b2 i : ±a2 i : b2 ), ( a2 + b2 i : ±a2 i : b2 ). Por tanto las rectas tangentes a C̄ que
pasan por (0 : 1 : ±i) son
(a2 + b2 )X0 ±
a2 + b2 X1 + a2 + b2 iX2 = 0
y
a2 + b2 X1 − a2 + b2 iX2 = 0
√
√
√
con lo que los focos quedan los puntos (− a2 + b2 , 0), ( a2 + b2 , 0) (0, − a2 + b2 i) y
√
(0, a2 + b2 i).
(a2 + b2 )X0 ∓
2
2
Y
–Si C es la elipse real de ecuación X
cuentas que antes
a2 + b2 = 1, las mismas
√
√
2
2
2
2
(basta cambiar b por −b ) nos dan como focos los puntos (− a − b , 0), ( a2 − b2 , 0)
√
√
(0, − a2 − b2 i) y (0, a2 − b2 i). Si la elipse fuera imaginaria (cambiando los a2 y b2 por
sus opuestos en la ecuación de C), quedarı́an los mismos focos. Obsérvese que, en el caso
de una circunferencia (real o imaginaria) los cuatro focos coinciden.
–Si C es la parábola de ecuación Y = aX 2 , la recta polar a (0 : 1 : ±i) respecto de C̄
es ∓ 2i X0 + aX1 = 0, que intersecada con C̄ (de ecuación X0 X2 = aX12 ) nos da los puntos
(0 : 0 : 1) y (∓4ai : 2 : ±i). Por tanto, las rectas tangentes a C̄ que pasan por (0 : 1 : ±i)
son X0 = 0 y ∓iX0 + 4aX1 ± 4aiX2 = 0, y se obtiene sólo un foco, que es el punto afı́n
1
(0, 4a
).
Definición. Se llaman ejes de una cónica euclı́dea a:
51
–las rectas que unen los dos focos reales reales o dos focos imaginarios conjugados, en
el caso de la hipérbola o una elipse que no sea una circunferencia (hay dos ejes, que son
perpendiculares entre sı́ y se cortan en el centro de la cónica);
–la recta que pasa por el foco de la parábola y su punto del infinito. En este caso, se
llama directriz de la parábola a la recta perpendicular al eje que pasa por el simétrico del
foco respecto del punto de intersección de la parábola con el eje.
52
ESPACIOS PROYECTIVOS
6. Construcción del espacio proyectivo
A la vista de cómo hemos definido primero P2k y luego P1k , está claro que puede generalizarse para definir Pnk para n arbitrario. Basta definirlo como el conjunto de elementos
(a0 : . . . : an ) (con no todos los ai nulos) tales que (a0 : . . . : an ) = (b0 : . . . : bn ) si y sólo si
existe λ ∈ k \ {0} tal que (b0 , . . . , bn ) = λ(a0 , . . . , an ). De todas formas, una definición ası́
no es muy precisa matemáticamente. Probemos a dar entonces una descripción alternativa,
que valdrá en un contexto más general. La condición (b0 , . . . , bn ) = λ(a0 , . . . , an ) anterior
es en realidad equivalente a decir que los vectores (a0 , . . . , an ) y (b0 , . . . , bn ) generan la
misma recta vectorial en k n+1 . Más en general, podemos definir:
Definición. Se llama proyectivizado de un espacio vectorial V sobre un cuerpo k al conjunto P(V ) de rectas vectoriales de V . Si V = k n+1 , escribiremos simplemente Pnk , y lo
llamaremos espacio proyectivo de dimensión n.
Si consideramos la aplicación π : V → P(V ) que asocia a cada vector no nulo la recta
vectorial que genera en V , tenemos claramente una aplicación suprayectiva, y además
π(v) = π(w) si y sólo si existe λ ∈ k \ {0} tal que w = λv. Por tanto, la relación ∼ en
V \ {0} definida por
v ∼ w ⇔ ∃λ ∈ k \ {0} tal que w = λv
es una relación de equivalencia y además el cociente V \ {0} está en biyección con P(V )
en forma natural (asociando a la clase de v la recta vectorial generada por v). Por tanto,
podemos tambier dar la siguiente:
Definición (otra definición equivalente de espacio proyectivo). El proyectivizado de un
espacio vectorial V es el cociente P(V ) de V \ {0} por la relación de equivalencia ∼. Al
punto de P(V ) que corresponde a la clase del vector v la denotaremos por [v]. Si V = k n+1 ,
el punto de Pnk que corresponde a la clase del vector (a0 , . . . , an ) la denotaremos por
(a0 : . . . : an ) en vez de [(a0 , . . . , an )].
Si V es un espacio vectorial de dimensión finita de dimensión n + 1, tomando una
base de V cada vector de V puede representarse por n + 1 coordenadas, por lo que cada
elemento de P(V ) puede representarse por un elemento de Pnk . Por tanto, P(V ) se puede
identificar con Pnk (ya veremos esto con más precisión cuando describamos los sistemas de
referencia).
53
Definición. Dado un espacio proyectivo P(V ), se llama subespacio proyectivo o lineal de
dimensión r a un subconjunto de la forma P(W ), donde W es un subespacio vectorial de
dimensión r + 1. A los subespacios proyectivos de dimensión uno se les llama rectas, a los
de dimensión dos se les llama planos y a los de dimensión n − 1 (donde n es la dimensión
de P(V ), es decir dim(V ) = n + 1) se les llama hiperplanos. Por definición, los subespacios
proyectivos de dimensión cero son los puntos. Por convenio, el conjunto vacı́o (que se
puede ver como el proyectivizado del subespacio cero) diremos que tiene dimensión −1.
Obsérvese que una hipersuperficie proyectiva P(W ) de P(V ) es lo mismo que una
hipersuperficie vectorial W de V , que viene dada por tanto por una ecuación, que es una
forma lineal no nula sobre V (que es lo que ocurrı́a para las rectas de P2k ). Además, dos
ecuaciones definen la misma hipersuperficie si y sólo si son proporcionales. Por tanto, el
conjunto de hipersuperficies de P(V ) se identifica con el conjunto de formas lineales no
nulas sobre V módulo proporcionalidad, es decir, V ∗ \ {0}/ ∼, que es precisamente P(V ∗ ).
Generalizando la noción de plano dual, tendremos entonces:
Definición. Se llama espacio proyectivo dual de un espacio proyectivo P(V ) al conjunto
P(V )∗ de todos los hiperplanos de P(V ). Es otro espacio proyectivo que se puede identificar
con P(V ∗ ).
Por otra parte, una recta P(W ) ⊂ Pnk corresponde a un subespacio W ⊂ k n+1
de dimensión dos, que se podrá generar por dos vectores linealmente independientes
(a0 , . . . , an ), (b0 , . . . , bn ). Por tanto, un vector (x0 , . . . , xn ) está en W (que es lo mismo
que decir que el punto (x0 : . . . : xn ) está en P(W )) si y sólo si existen t0 , t1 ∈ k (no ambos
nulos) tales que
x0 =a0 t0 + b0 t1
..
.
xn =an t0 + bn t1
con lo que recobramos la parametrización de las rectas (y no sólo en
P2k ).
Observación 6.1. Dados subespacios P(W1 ), . . . , P(Ws ) de un espacio proyectivo P(V ),
se pueden hacer las siguientes operaciones:
–La intersección P(W1 ) ∩ . . . ∩ P(Ws ), que consistirá en los elementos [v] tales que v
está en cada Wi , es decir, que P(W1 ) ∩ . . . ∩ P(Ws ) = P(W1 ∩ . . . ∩ Ws ), con lo que en
particular la intersección de subespacios es otro subespacio.
–El mı́nimo subespacio P(W ) que los contiene, luego W será el mı́nimo subespacio
vectorial que contiene a W1 , . . . , Ws , es decir, W = W1 + . . . + Ws .
54
Definición. Se llama subespacio generado por los subespacios P(W1 ), . . . , P(Ws ), y lo denotaremos por < P(W1 ), . . . , P(Ws ) > al mı́nimo subespacio proyectivo que los contiene.
Como hemos visto, < P(W1 ), . . . , P(Ws ) >= P(W1 + . . . + Ws ).
Proposición 6.2 (fórmula de Grassmann). Sean
de P(V ). Entonces
P(W1 ), P(W2 ) subespacios proyectivos
dim < P(W1 ), P(W2 ) >= dim P(W1 ) + dim P(W2 ) − dim P(W1 ∩ W2 ).
Demostración: Hemos visto que < P(W1 ), P(W2 ) >= P(W1 +W2 ), luego por definición tendremos que dim < P(W1 ), P(W2 ) >= dim(W1 + W2 ) − 1, que por la fórmula de Grassmann
vectorial será igual a dim W1 + dim W2 − dim(W1 − W2 ) = (dim W1 − 1) + (dim W2 − 1) −
(dim(W1 ∩W2 )−1), que por definición es igual a dim P(W1 )+dim P(W2 )−dim P(W1 ∩W2 ).
Corolario 6.3. Sean Λ, Λ dos subespacios proyectivos de dimensiones respectivas r, r en
un espacio proyectivo de dimensión n. Entonces, si r + r ≥ n, la intersección de Λ y Λ
tiene dimensión al menos r + r − n (y por tanto es no vacı́a).
Demostración: Por la fórmula de Grassmann, dim(Λ ∩ Λ ) = r + r − dim < Λ, Λ >. Como
claramente dim < Λ, Λ >≥ n, el resultado se sigue inmediatamente.
Corolario 6.4. Sea Λ un subespacio proyectivo de dimensión r. Entonces, si H es un
hiperplano que no contiene a Λ, Λ ∩ H tiene dimensión r − 1 (por ejemplo, una recta y un
hiperplano que no la contiene se intersecan exactamente en un punto).
Demostración: De nuevo por la fórmula de Grassmann, se tiene que dim(Λ ∩ H) = n −
1 + r − dim < Λ, H >. Como Λ ⊆
/ H, se sigue que H ⊆
/ < Λ, H >, por lo que < Λ, H >
tiene dimensión mayor que n − 1 (y por tanto es el total), es decir dim < Λ, H >= n, de
donde se obtiene dim(Λ ∩ H) = r − 1.
Ejemplo 6.5.Consideramos en P5k , donde usaremos coordenadas (a0 : a1 : a2 : a3 : a4 : a5 ),
el subespacio de ecuaciones
a0
a0
a3
+a1
+a2
+a3
55
+a4
a5
+a5
=0
=0
=0
= 0.
Como corresponde a un plano vectorial en k 6 , entonces es una recta L ⊂ P5 , que podremos
parametrizar como
a0 = 0
a1 = t0
a2 = t1
a3 = 0
a4 = −t0 − t1
a5 = 0
Este ejemplo no está escogido al azar. De hecho, un punto (a0 : a1 : a2 : a3 : a4 : a5 ) ∈
P5k se puede identificar con la cónica de P2k de ecuación a0 X02 + a1 X0 X1 + a2 X0 X2 +
a3 X12 + a4 X1 X2 + a5 X22 = 0 (ya que dos ecuaciones definen la misma cónica si y sólo si
sus ecuaciones tienen sus coeficientes proporcionales). Con esta identificación, se observa
inmediatamente que
• a0 = 0 si y sólo si el punto (1 : 0 : 0) pertenece a la cónica.
• a1 = 0 si y sólo si el punto (0 : 1 : 0) pertenece a la cónica.
• a3 = 0 si y sólo si el punto (0 : 0 : 1) pertenece a la cónica.
• a0 + a1 + a2 + a3 + a4 + a5 = 0 si y sólo si el punto (1 : 1 : 1) pertenece a la cónica.
Por tanto, L se interpreta dentro del conjunto de las cónicas de P2k como el subconjunto
de aquéllas que pasan por los puntos (1 : 0 : 0), (0 : 1 : 0), (0 : 0 : 1), (1 : 1 : 1). La
parametrización anterior de L nos está diciendo que cualquier cónica que pase por dichos
puntos se puede escribir de la forma
t0 (X0 X1 − X1 X2 ) + t1 (X0 X2 − X1 X2 ).
Obsérvese que se obtiene entonces una combinación lineal genérica del par de rectas
X1 (X0 − X2 ) (que son las rectas que pasan respectivamente por (1 : 0 : 0), (0 : 0 : 1)
y por (0 : 1 : 0), (1 : 1 : 1)) y del par de rectas X2 (X0 − X1 ) (que son las rectas que pasan
respectivamente por (1 : 0 : 0), (0 : 1 : 0) y por (0 : 0 : 1), (1 : 1 : 1)).
Definición. Se llama haz de cónicas a un subconjunto L de cónicas de P2k , que, visto como
subconjunto de P5k , forme una recta L ⊂ P5k .
Observación 6.6. Identificaremos, como en el ejemplo anterior, el conjunto de cónicas
con P5k . Para cualquier punto p = (b0 : b1 : b2 ), el conjunto Hp de las cónicas que pasan
por p tiene ecuación b20 a0 + b0 b1 a1 + b0 b2 a2 + b21 a3 + b1 b2 a4 + b22 a5 = 0, que es un hiperplano
en P5k (el recı́proco no es cierto: es un simple ejercicio ver que, por ejemplo, el hiperplano
a1 = 0 no corresponde a las cónicas que pasan por algún punto). Por tanto, uno se espera
56
que las cónicas que pasan por cuatro puntos (al ser la intersección de cuatro hiperplanos
de P5k ) sea un subconjunto proyectivo de dimensión uno, es decir, un haz. El siguiente
resultado da la respuesta completa.
Proposición 6.7. Sean p1 , p2 , p3 , p4 ∈ P2k cuatro puntos distintos. Entonces:
(i) El conjunto de cónicas que pasan por p1 , p2 , p3 es un subconjunto proyectivo de P5k de
dimensión dos.
(ii) El conjunto de cónicas que pasan por p1 , p2 , p3 , p4 forma un haz si y sólo si no existe
una recta que pase por p1 , p2 , p3 , p4 .
Demostración: La idea para demostrar (i) es aplicar sucesivamente el Lema 6.4 para
calcular la dimensión del subconjunto Hp1 ∩ Hp2 ∩ Hp3 (que es precisamente el conjunto
de cónicas que pasan por p1 , p2 , p3 ). En primer lugar, Hp1 es un hiperplano, luego tiene
dimensión cuatro. Claramente Hp1 no está contenido en Hp2 (basta tomar una recta doble
que pase por p1 y que no pase por p1 ), ası́ que el Lema 6.4 implica que Hp1 ∩ Hp2 tiene
dimensión tres. De nuevo, Hp1 ∩ Hp2 no está contenido en el hiperplano Hp3 (tómese por
ejemplo un par de rectas, una que pase por p1 y no por p3 y otra que pase por p2 y no
por p3 ), con lo que el Lema 6.4 nos dice ahora que Hp1 ∩ Hp2 ∩ Hp3 tiene dimensión dos,
lo que demuestra (i).
Para demostrar (ii), supongamos en primer lugar que no existe ninguna recta que
contenga a p1 , p2 , p3 , p4 . Por tanto, el punto p4 no puede estar al mismo tiempo en las
rectas p1 p2 , p1 p3 , p2 p3 . Sin pérdida de generalidad, podemos suponer por ejemplo que p4
no está en p1 p2 . Tomando entonces la cónica formada por la recta p1 p2 y cualquier recta
que pase por p3 pero no por p4 , se concluye que Hp1 ∩ Hp2 ∩ Hp3 no está contenido en
Hp4 . Aplicando una vez más el Lema 6.4, se concluye que Hp1 ∩ Hp2 ∩ Hp3 ∩ Hp4 tiene
dimensión uno, luego es efectivamente un haz de cónicas.
Si en cambio suponemos que p1 , p2 , p3 , p4 están todos en una recta de ecuación u0 X0 +
u1 X1 + u2 X2 = 0, entonces todas las cónicas de la forma t0 (u0 X02 + u1 X0 X1 + u2 X0 X2 ) +
t1 (u0 X0 X1 +u1 X12 +u2 X1 X2 )+t2 (u0 X0 X2 +u1 X1 X2 +u2 X22 ) = 0 pasan por p1 , p2 , p3 , p4 .
Esto da un subespacio de P5k de ecuaciones paramétricas
a0
a
1
a2
a3
a4
a5
= u 0 t0
= u 1 t0
= u 2 t0
=
=
=
+ u 0 t1
+ u 0 t2
u 1 t1
u 2 t1
57
+ u 1 t2
u 2 t2
u0 0
0
u1 u0 0
u2 0 u0
Dado que la matriz de coeficientes
tiene claramente rango tres (ya que
0 u1 0
0 u2 u1
0
0 u2
u0 , u1 , u2 no son todos nulos), estas ecuaciones definen un subespacio vectorial de dimensión
tres de k 5 y por tanto un subespacio proyectivo de dimensión dos de P5k . Esto demuestra que
el conjunto de cónicas que pasan por p1 , p2 , p3 , p4 no es un haz (y de hecho es exactamente
un subespacio proyectivo de dimensión dos de P5k , ya que Hp1 ∩ Hp2 ∩ Hp3 ∩ Hp4 está
contenido en Hp1 ∩Hp2 ∩Hp3 , que por (i) tiene dimensión dos; esto demuestra que, además,
las cónicas que pasan por p1 , p2 , p3 , p4 consisten en un par de rectas, una de las cuales es
la que contiene a p1 , p2 , p3 , p4 ).
La pregunta natural es: ¿Son todos los haces de cónicas de la forma anterior (es decir,
conjuntos de cónicas que pasan por cuatro puntos no alineados)? Para responder a eso,
damos primero la siguiente:
Definición. Se llama base de un haz de cónicas al conjunto de puntos de
todas las cónicas de un haz.
P2k que están en
Lema 6.8. Sea A ⊂ P5k un haz de cónicas. Entonces, dadas dos cónicas cualesquiera de
C1 , C2 ∈ A, la base de A es C1 ∩ C2 . Por tanto, la base de A o bien es un conjunto finito
de a lo más cuatro punto, o bien es una recta y un punto o bien es una recta.
Demostración: Evidentemente, como los puntos de la base de A están en cada cónica del
haz, en particular están en C1 y C2 , luego están en C1 ∩ C2 . Recı́procamente, sea p un
punto de la intersección de C1 y C2 . Si F1 , F2 ∈ k[X0 , X1 , X2 ] son ecuaciones de C1 y C2
respectivamente, se tendrá que F (p1 ) = F (p2 ) = 0. Por tanto, como cualquier cónica de
A tiene de ecuación t0 F1 + t1 F2 y evidentemente t0 F1 (p) + t1 F2 (p) = 0, entonces p está
también en cualquier cónica del haz.
Para ver cómo puede ser la base de A, supongamos en primer lugar que A contiene
una cónica no degenerada C1 . Si es imaginaria, entonces claramente la base del haz es el
conjunto vacı́o. Si C1 no es imaginaria, entonces se puede parametrizar, y al cortar con
cualquier otra cónica del haz obtenemos cuatro puntos (contados con multiplicidad, luego
el número de puntos distintos puede ser menor que cuatro).
Supongamos en cambio que todas las cónicas de A son degeneradas. Si todas fueran
rectas dobles, entonces es claro que la base del haz serı́a exactamente un punto (el de
intersección de dos de las rectas dobles cualesquiera del haz). Si en cambio existe un par
de rectas L1 ∪ L2 en A, entonces otro par de rectas en A o bien consiste en dos rectas
58
ambas distintas a L1 , L2 (con lo que la base del haz será un conjunto de a lo más cuatro
puntos) o bien será la unión de, por ejemplo, L1 con otra recta L2 (en cuyo caso la base
de A es L1 más el punto de intersección de L2 y L2 , que podrı́a estar dentro de L1 .
Observación 6.9. No es difı́cil construir ejemplos de haces de cónicas para cada una de
las posibles bases dadas por el resultado anterior. Obsérvese que, en los casos en que la
base del haz es un conjunto de puntos, en realidad se puede considerar que salen siempre
cuatro puntos, si se incluyen los imaginarios y también la multiplicidad. Por ejemplo, la
base del haz de cónicas reales
t0 (X0 X2 − X12 ) + t1 (X02 + X12 ) = 0
consiste en el punto (0 : 0 : 1), contado con multiplicidad dos, y en los puntos imaginarios
(1 : i : −1), (1 : −i : −1) (al sustituir la parametrización (s20 : s0 s1 : s21 ) de la primera
cónica se obtiene s20 (s20 + s21 )). Si la base del haz es una recta L1 y un punto p fuera de ella,
tomando p1 , p2 , p3 ∈ L, el haz se puede describir como el conjunto de cónicas que pasan
por p1 , p2 , p3 , p. Si en cambio el haz de cónicas son los pares de rectas tales que una de las
rectas es L y la otra pasa por un punto p ∈ L, entonces, tomando p1 , p2 ∈ L distintos de p,
se podrı́a ver el haz como el conjunto de cónicas que pasan por p1 , p2 y “pasan dos veces”
por p. Por tanto, en cualquiera de los casos un haz se puede describir como el conjunto de
cónicas que pasan por cuatro puntos, aunque alguno cuente varias veces o sea imaginario.
Observación 6.10. Nótese que todos los haces de cónicas contienen cónicas degeneradas.
La mejor forma de verlo es con un ejemplo. Si consideramos el haz de la observación
anterior, la matriz de una cónica del haz será
t0
0
t1
2
0 t0 − t 1 0
t0
0
0
2
luego la cónica será degenerada si y sólo si la matriz tiene determinante cero, es decir,
t0 2
(t0 − t1 ) = 0, que nos da las soluciones (t0 : t1 ) = (0 : 1) con multiplicidad dos
2
y (t0 : t1 ) = (1 : 1), que dan respectivamente las cónicas X02 + X12 = 0 (par de rectas
imaginarias conjugadas) y X0 (X0 + X2 ) = 0 (par de rectas reales). En principio, puede
parecer extraño que el último par de rectas pase con multiplicidad dos por (0 : 0 : 1), ya
que sólo la rectas X0 = 0 pasa por ese punto. En realidad, es que el hecho de pasar con
multiplicidad dos por un punto es más sofisticado de la idea intuitiva que hemos dado. Por
ejemplo, en este caso, las cónicas del haz pasan por (0 : 0 : 1) con recta tangente X0 = 0,
es decir, que pasan por el punto y por otro “infinitamente próximo” en esa dirección (otra
forma de decirlo, para incluir también las cónicas degeneradas, es que la recta X0 = 0
corta a las cónicas del haz en (0 : 0 : 1) con multiplicidad dos).
59
En general, el determinante de la matriz de la cónica general del haz es o bien idénticamente
nulo (si todas las cónicas del haz son degeneradas) o bien homogéneo de grado tres en t0 , t1 ,
con lo que da tres soluciones contadas con multiplicidad. Por ejemplo, en el caso más
general del haz de cónicas que pasan por cuatro puntos p1 , p2 , p3 , p4 tales que no hay tres
alineados, hay tres cónicas degeneradas, que son los pares de rectas p1 p2 ∪ p3 p4 , p1 p3 ∪ p2 p4
y p1 p4 ∪ p 2 p3 .
Estudiamos ahora la dualidad en el espacio proyectivo, que no es sino la traducción
de la dualidad en espacios vectoriales.
Teorema 6.11. Sea P(V ) un espacio vectorial de dimensión n. Para cada subespacio
proyectivo Λ ⊂ P(V ) definimos
Ω(Λ) := {H ∈ P(V )∗ | Λ ⊂ H}
y para cada subespacio proyectivo A ⊂ P(V )∗ definimos
Ω∗ (A) :=
H.
H∈A
Entonces:
(i) Si dim Λ = r, entonces Ω(Λ) es un subespacio proyectivo de
n − r − 1.
P(V )∗
de dimensión
P(V )
de dimensión
(ii) Si dim A = s, entonces Ω∗ (A) es un subespacio proyectivo de
n − s − 1.
(iii) Ω y Ω∗ definen biyecciones entre el conjunto de subespacios proyectivos de P(V ) y el
conjunto de subespacios proyectivos de P(V ) que son inversas la una de la otra.
(iv) Si Λ, Λ son subespacios proyectivos de P(V ), entonces Ω(Λ ∩ Λ ) =< Ω(Λ), Ω(Λ ) >
y Ω(< Λ, Λ >) = Ω(Λ) ∩ Ω(Λ ).
(v) Si A, A son subespacios proyectivos de P(V )∗, entonces Ω∗ (A∩A ) =< Ω∗ (A), Ω∗ (A ) >
y Ω∗ (< A, A >) = Ω∗ (A) ∩ Ω∗ (A ).
Demostración: A lo largo de la demostración supondremos fijada una base de V , con lo
que trabajaremos con coordenadas respecto de esa base.
Para demostrar (i), un subespacio Λ ⊂ P(V ) de dimensión r corresponderá a un
subespacio de vectorial de V de dimensión r + 1, por lo que se podrá poner como el subespacio generado por vectores independientes (a00 , . . . , a0n ), . . . , (ar0 , . . . , arn ). Entonces,
una forma lineal u0 X0 + . . . + un Xn ∈ V ∗ define un hiperplano de P(V ) que contiene a Λ
60
si y sólo si
a00 u0 + . . . + a0n un = 0
..
.
ar0 u0 + . . . + arn un = 0.
Por tanto, éstas son las ecuaciones de Ω(Λ), por lo que representa un subespacio de P(V )∗ .
Además, como las r + 1 ecuaciones son linealmente independientes, es un subespacio dimensión n − r − 1.
Para ver (ii), supongamos que A corresponde al subespacio de de V ∗ generado por las
formas lineales independientes
H0 =u00 X0 + . . . + u0n Xn
..
.
Hs =us0 X0 + . . . + usn Xn .
Es claro que la intersección en P(V ) de los hiperplanos de A coincide con la intersección de
los hiperplanos definidos por H0 , . . . , Hs . Al ser independientes, la intersección de dichos
hiperplanos es un subespacio de P(V ) de dimensión n − s − 1.
Para la parte (iii), observemos que que para todo subespacio Λ ⊂ P(V ) se tiene
Ω∗ (Ω(Λ)) = H∈Ω(Λ) H = H⊃Λ H, que claramente contiene a Λ. Como (i) y (ii) implican
que Ω∗ (Ω(Λ)) y Λ tienen la misma dimensión, se sigue entonces la igualdad Ω∗ (Ω(Λ)) = Λ.
De la misma forma, para cualquier subespacio A ⊂ P(V )∗ se tiene la inclusión A ⊂
Ω(Ω∗ (A)) (ya que cualquier hiperplano de A contiene a Ω∗ (A), que es la intersección de
todos los hiperplanos de A), y de nuevo por (i) y (ii) es una igualdad.
De (iv) y (v) son inmediatas a partir de la definición las igualdades Ω(< Λ, Λ >) =
Ω(Λ) ∩ Ω(Λ ) y Ω∗ (< A, A >) = Ω∗ (A) ∩ Ω∗ (A ). Las otras dos se obtienen a partir de las
biyecciones Ω y Ω∗ . Por ejemplo, para demostrar la igualdad Ω(Λ ∩ Λ ) =< Ω(Λ), Ω(Λ ) >
basta demostrar la igualdad
Ω∗ (Ω(Λ ∩ Λ )) = Ω∗ (< Ω(Λ), Ω(Λ ) >).
Pero el término de la izquierda es Λ ∩ Λ por (iii), y el término de la derecha es, como
acabamos de observar, igual a Ω∗ (Ω(Λ)) ∩ Ω∗ (Ω(Λ )), que de nuevo por (iii) es igual a
Λ ∩ Λ∗ .
Definición. Llamaremos sistema lineal de hiperplanos de dimensión s a un subconjunto
proyectivo A ⊂ P(V )∗ de dimensión s. Si s = 1, al sistema lineal lo llamaremos haz de
hiperplanos. Por el teorema anterior, un sistema lineal de hiperplanos es el conjunto de
61
hiperplanos de P(V ) que contienen a un subespacio proyectivo Λ ⊂ P(V ) de dimensión
n − s − 1. Además, si M0 , . . . , Ms ∈ V ∗ son s + 1 formas lineales independientes que
definen a Λ, entonces los hiperplanos del sistema lineal Ω(Λ) son los de ecuaciones λ0 M0 +
. . . + λs Ms = 0 con λ0 , . . . , λs ∈ k.
62
7. Aplicaciones proyectivas
Ya hemos observado que para dar coordenadas en el espacio proyectivo P(V ) basta
dar una base de V y tomar coordenadas respecto de dicha base. Por ejemplo, una recta en
P2k corresponderá a un subespacio vectorial de dimensión dos de k3 , que estará generado
por dos vectores (a0 , a1 , a2 ) y (b0 , b1 , b2 ). Entonces, podemos decir que un punto de la
recta tiene coordenadas (t0 : t1 ) si es el punto (a0 t0 + b0 t1 : a1 t0 + b1 t1 : a2 t0 + b2 t1 ). En
otras palabras, dar coordenadas en la recta no es más que dar una parametrización de la
misma. Ya observamos (Observación 2.10y Teorema 2.11) que la parametrización no está
determinada por los puntos (a0 : a1 : a2 ) y (b0 : b1 : b2 ), sino que hace falta un tercer
punto. En general, habrá que añadir siempre otro punto para obtener una base:
Proposición 7.1. Sea p0 , . . . , pn+1 un conjunto de n + 2 puntos de un espacio proyectivo
P(V ) tales que no haya ningún hiperplano que contenga a n + 1 de ellos. Entonces existe
una base {v0 , . . . , vn } de V tal que
p0 =[v0 ]
..
.
pn =[vn ]
pn+1 =[v0 + . . . + vn ].
Además, cualquier otra base que verifique lo mismo es de la forma {λv0 , . . . , λvn } para
algún λ ∈ k \ {0}.
Demostración: Sean w0 , . . . , wn+1 ∈ V tales que p0 = [w0 ], . . . , pn+1 = [wn+1 ]. Como
p0 , . . . , pn no están en ningún hiperplano de P(V ), w0 , . . . , wn no están en ningún hiperplano de V , es decir, son linealmente independientes, por lo que forman una base de V .
Tendremos entonces una relación
wn+1 = λ0 w0 + . . . + λn wn
donde además λ0 , . . . , λn son todos no nulos (si fuera λi = 0, entonces los vectores
w0 , . . . , wi−1 , wi+1 . . . , wn+1 serı́an linealmente dependientes, con lo que estarı́an en un
hiperplano, luego los puntos p0 , . . . , pi−1 , pi+1 . . . , pn+1 estarı́an en un hiperplano, en contra de nuestra hipótesis). Basta tomar entonces v0 = λ0 w0 , . . . , vn = λn wn .
Supongamos ahora que tenemos v0 , . . . , vn ∈ V tales que
p0 =[v0 ]
..
.
pn =[vn ]
pn+1 =[v0 +
63
.
. . . + vn ]
Entonces extistirán µ0 , . . . , µn+1 tales que
v0 =µ0 v0
..
.
vn =µn vn
v0 + . . . + vn =µn+1 (v0 + . . . + vn ).
Sumando las n + 1 primeras igualdades y sustituyendo en la última, obtenemos
µ0 v0 + . . . + µn vn = µn+1 v0 + . . . + µn+1 vn .
Como v0 , . . . , vn forman una base (en particular son linealmente independientes) se tiene
que µ0 = . . . = µn = µn+1 , que es lo que querı́amos demostrar (llamando λ a este valor
común).
Definición. Un conjunto de puntos en posición general en un espacio proyectivo P(V ) es
un conjunto de puntos p0 , . . . , ps tales que cualesquiera pi0 , . . . , pir distintos (con r ≤ n)
generan un subespacio proyectivo de dimensión r. En otras palabras:
–Si s ≤ n, los puntos generan un subespacio de dimensión s.
–Si s ≥ n, no existe un hiperplano de
cardinal n + 1 de los p0 , . . . , ps .
P(V )
que contenga ningún subconjunto de
Se llama referencia proyectiva de P(V ) a un conjunto ordenado de n + 2 puntos en posición
general. Se llama base asociada a una referencia proyectiva a cualquiera de las bases que
proporciona el Teorema 7.1.
Corolario 7.2. Sea P(V ) un espacio proyectivo de dimensión n y sea R una referencia
proyectiva de P(V ). Entonces la aplicación ϕR : Pnk → P(V ) que asocia a cada (a0 : . . . : an )
el punto de P(V ) que corresponde a un vector v ∈ V de coordenadas (a0 , . . . , an ) respecto
de una base asociada a R está bien definida y es biyectiva.
Demostración: Sea B = {v0 , . . . , vn } una base asociada a R. Tenemos entonces un isomorfismo ψB : k n+1 → V de espacios vectoriales que asocia a cada (a0 , . . . , an ) el vector
a0 v0 + . . . + an vn . Entonces debe ser ϕR (a0 : . . . : an ) = [ψB (a0 , . . . , an )], con lo que
para estar bien definido hay que ver que este valor no depende ni del representante de
(a0 : . . . : an ) ni de la base asociada B.
En primer lugar, si (a0 : . . . : an ) = (a0 : . . . : an ), entonces existe λ ∈ k \ {0}
tal que (a0 , . . . , an ) = µ(a0 , . . . , an ), luego ψB (a0 , . . . , an ) = λψB (a0 , . . . , an ), y por tanto
[ψB (a0 , . . . , an )] = [ψB (a0 , . . . , an )].
64
En segundo lugar, si B fuera otra base asociada a R, por el Teorema 7.1 se sigue que
existe λ ∈ k \ {0} tal que B = {λv0 , . . . , λvn }. Por tanto,
ψB (a0 , . . . , an ) = a0 λv0 + . . . + an λvn = λ(a0 v0 + . . . + an vn ) = λψB (a0 , . . . , an )
es decir, [ψB (a0 , . . . , an )] = [ψB (a0 , . . . , an )].
Definición. Dado un punto [v] ∈ P(V ), se llaman coordenadas respecto a una referencia proyectiva R = {p0 , . . . , pn , pn+1 } a ϕ−1
R ([v]), es decir, a (a0 : . . . : an ), donde
(a0 , . . . , an ) son las coordenadas de v respecto de cualquier base asociada a la referencia proyectiva. Obsérvese que las coordenadas respecto de R de los puntos p0 , . . . , pn , pn+1
son, respectivamente, (1 : 0 : . . . : 0), . . . , (0 : . . . : 0 : 1), (1 : . . . : 1). El punto pn+1 se
llama punto unidad de la referencia. Se llama referencia canónica de Pnk a la referencia
{(1 : 0 : . . . : 0), . . . , (0 : . . . : 0 : 1), (1 : . . . : 1)}.
La demostración del Corolario 7.2 se puede generalizar:
Proposición 7.3. Sean V, W dos espacios vectoriales de dimensión n + 1 sobre k. Entonces:
(i) Si ψ : V → W es un isomorfismo de espacios vectoriales, la aplicación ϕ : P(V ) →
P(W ) dada por ϕ([v]) = [ψ(v)] está bien definida y es una biyección.
(ii) Si {p0 , . . . , pn , pn+1 } es una referencia proyectiva de P(V ) y {v0 , . . . , vn } es una base
asociada, {ϕ(p0 ), . . . , ϕ(pn ), ϕ(pn+1 )} es una referencia proyectiva de P(W ) con base
asociada {ψ(v0 ), . . . , ψ(vn )}.
(iii) Dos isomorfismos ψ, ψ : V → W definen la misma aplicación ϕ : P(V ) → P(W ) si y
sólo si existe λ ∈ k \ {0} tal que ψ = λψ.
Demostración: Para demostrar (i), observamos primero que ψ(v) = 0 si v = 0, con lo
que tiene sentido hablar de [ψ(v)]. Además, [v] = [v ] si y sólo si existe λ ∈ k \ {0} tal
que v = λv, que es equivalente (por ser ψ un biyectiva) a ψ(v ) = ψ(λv); como ψ es un
homomorfismo de espacios vectoriales, ψ(λv) = λψ(v), por lo que la igualdad anterior es
equivalente a [ψ(v )] = [ψ(v)]. Esto demuestra que ϕ está bien definida y es inyectiva. La
suprayectividad de ϕ es inmediata, ya que dado [w] ∈ P(W ), por la suprayectividad de ψ
tenemos que existe v ∈ V tal que w = ψ(v). Además, como w = 0 y ψ es homomorfismo,
se sigue que v = 0. Por tanto, [w] = ϕ([v]).
La parte (ii) es una consecuencia de las igualdades
ϕ(p0 ) = ϕ([v0 ]) = [ψ(v0 )]
..
.
65
ϕ(pn ) = ϕ([vn ]) = [ψ(vn )]
ϕ(pn+1 ) = ϕ([v0 + . . . + vn ]) = [ψ(v0 + . . . + vn )] = [ψ(v0 ) + . . . + ψ(vn )]
Para la parte (iii), es claro que cualquier isomorfismo de la forma λψ define la misma
aplicación ϕ que ψ. Recı́procamente, supongamos que ψ, ψ definen la misma ϕ. Tomamos
{p0 , . . . , pn , pn+1 } una referencia proyectiva de P(V ) y {v0 , . . . , vn } una base asociada suya.
Por (ii), {ψ(v0 ), . . . , ψ(vn )} como {ψ (v0 ), . . . , ψ (vn )} son bases de W serán dos bases
asociadas de {ϕ(p0 ), . . . , ϕ(pn ), ϕ(pn+1 )}. Por la Proposición 7.1, existe λ ∈ k \ {0} tal que
ψ (v0 ) = λψ(v0 )
..
.
ψ (vn ) = λψ(vn )
lo que implica que ψ = λψ.
Definición. Se llama proyectividad entre dos espacios proyectivos P(V ) y P(W ) a una
biyección obtenida como en la Proposición 7.3 a partir de un isomorfismo entre V y W .
Se llama parametrización de un espacio proyectivo P(V ) a una proyectividad entre Pnk y
P(V ).
Teorema 7.4 (segundo teorema fundamental de la geometrı́a proyectiva). Sean P(V ) y
P(W ) dos espacios proyectivos de dimensión n y referencias respectivas {p0 , . . . , pn , pn+1 }
y {q0 , . . . , qn , qn+1 }. Entonces existe una única proyectividad ϕ : P(V ) → P(W ) tal que
ϕ(pi ) = qi para i = 0, . . . , n + 1.
Demostración: Supongamos que ϕ venga definida a partir de un isomorfismo ψ : V → W
y veamos que ψ es único salvo multiplicación por constante. Si {v0 , . . . , vn } es una base
asociada a {p0 , . . . , pn , pn+1 }, entonces por la Proposición 7.3(ii), {ψ(v0 ), . . . , ψ(vn )} es una
base asociada a {q0 , . . . , qn , qn+1 }. Como por la Proposición 7.1 existen bases asociadas
a {q0 , . . . , qn , qn+1 } y todas son proporcionales entre ellas, existen isomorfismos ψ en esas
condiciones y todos ellos son proporcionales entre sı́.
El motivo de empezar estudiando las aplicaciones que inducen los isomorfismos vectoriales es que una aplicación lineal arbitraria F : V → W no da lugar a una aplicación
f : P(V ) → P(W ) bien definida (la definición seguirı́a siendo f ([v]) = [F (v)]). Siguiendo
la demostración de la Proposición 7.3, se observa que el problema es que, si F no es
inyectiva, existen vectores no nulos v ∈ ker F y entonces f ([v]) no está definida. Indicaremos el hecho de que una aplicación no esté definida en todos los puntos con la notación
f : P(V )-----> P(W ).
66
Definición. Se llama aplicación proyectiva entre dos espacios proyectivos P(V ) y P(W ) a
una aplicación f : P(V )-----> P(W ) definida por una aplicación lineal no nula F : V → W .
El subespacio P(ker F ) se llama centro de la aplicación proyectiva.
Ejemplo 7.5. Sea P(V ) un espacio proyectivo de dimensión n y sean Λ, Λ dos subespacios
disjuntos de dimensiones r y n − r − 1 (luego por la fórmula de Grassmann, < Λ, Λ >=
P(V ). Para cada p ∈ P(V ) \ Λ, podemos considerar el subespacio < p, Λ >, que por
la fórmula de Grassmann tiene dimensión r + 1. De nuevo por la fórmula de Grassmann,
dim(< p, Λ > ∩Λ ) = 0, es decir, es un punto p . Veamos que la aplicación f : P(V )\Λ → Λ
es proyectiva (y se llama proyección lineal de centro Λ sobre Λ ).
Sean W, W los subespacios vectoriales de V que corresponden respectivamente a Λ, Λ .
Como Λ ∩ Λ = ∅, se tiene W ∩ W = 0, y como dim W = r + 1 y dim W = n − r
se sigue que V = W + W . Entonces, para cada v ∈ W se puede escribir de forma
única v = w + w , con w ∈ W y w ∈ W \ {0}. Por tanto, se tiene w = v − w, que
claramente está en L[v] + W . En otras palabras, el punto [w ] de P(V ) está tanto en
< [v], Λ > como en P(W ). Como hemos visto que si [v] ∈ P(V ) \ P(W ) hay un único
punto en < [v], Λ > ∩P(W ), necesariamente es [w ], por lo que f ([v]) = [w ]. Dado que la
aplicación F : V → W que asocia a cada v el único vector w tal que v = w + w es un
homomorfismo, se sigue que f es proyectiva.
Podemos ahora generalizar la Proposición 7.3:
Proposición 7.6. Sea F : V → V un homomorfismo no nulo de espacios vectoriales y
sea f : P(V )-----> P(W ) la aplicación proyectiva inducida. Entonces
(i) Im f = P(Im F ), luego es un subespacio proyectivo de
dim P(V ) − dim(centro de f ) − 1.
P(W )
que tiene dimensión
(ii) f es suprayectiva si y sólo si F es suprayectiva.
(iii) f es inyectiva (donde está definida) si y sólo si F es inyectiva, es decir, si y sólo si el
centro de f es vacı́o (y por tanto f está definida en todo P(V )).
(iv) f es una proyectividad si y sólo si F es un isomorfismo.
(v) Otro homomorfismo no nulo F : V → W define la misma aplicación proyectiva f si y
sólo si existe λ ∈ k \ {0} tal que F = λF .
Demostración: Para demostrar (i), basta observar que los elementos de Im f son los
elementos de la forma f ([v]), con v ∈ V \ ker F , es decir, los elementos de la forma
[F (v)] con F (v) = 0, es decir, los elementos de P(Im F ). La fórmula de la dimensión es
consecuencia inmediata de la igualdad dim(Im F ) = dim V − dim ker F .
La parte (ii) es inmediata a partir de (i), de la misma forma que (iv) es consecuencia
de (ii) y (iii).
67
Para ver (iii), hay que trabajar un poco más. Supongamos primero que F es inyectiva.
Entonces, si f ([v]) = f ([v ], se tiene que [F (v)] = F (v )], por lo que existe λ ∈ k \ {0}
tal que F (v ) = λF (v). Esto implica que F (v ) = F (λv), que, por la inyectividad de F
implica v = λv, es decir, [v] = [v ], con lo que f es inyectiva. Recı́procamente, supongamos
ahora que f es inyectiva y veamos que ker F = 0. Para ello, tomamos v ∈ ker F y fijamos
cualquier v ∈ V \ ker F . Entonces tendremos F (v + v ) = F (v) + F (v ) = F (v ) = 0, con
lo que tendremos f ([v + v ]) = f ([v ]). Por la inyectividad de f , existe λ ∈ k \ {0} tal que
v + v = λv . Aplicando F , tendremos F (v ) = λF (v ), y como F (v ) = 0, se tendrá λ = 1,
por lo que v = 0, lo que demuestra ker F = 0.
Finalmente, para ver (v), es evidente que dos aplicaciones lineales proporcionales
definen la misma aplicación proyectiva. Recı́procamente, supongamos que F y F definen
la misma aplicación proyectiva f : P(V )-----> P(W ). En particular, el centro de f es tanto
P(ker F ) como P(ker F ), y la imagen de f es tanto P(Im F ) como P(Im F ). Por tanto,
ker F = ker F e Im F = Im F . Sea V ⊂ V un subespacio vectorial complementario de
ker F , es decir, V = ker F ⊕ V y sea W = Im F = Im F . Es entonces evidente que
F|V , FV : V → W son dos isomorfismos que definen la misma proyectividad f|P(W ) :
P(V ) → P(W ). Por tanto, por la Proposición 7.3(iii), existe λ ∈ k\{0} tal que F|V , λFV .
Sea ahora cualquier v ∈ V . Como V = ker F ⊕ V , podremos escribir v = v0 + v , con
v0 ∈ ker F = ker F y v ∈ V . Por tanto,
F (v) = F (v0 +v ) = F (v0 )+F (v ) = 0+λF (v) = λF (v0 )+λF (v) = λF (v0 +v ) = λF (v)
lo que demuestra que F = λF .
El resultado anterior nos permite dar las siguientes definiciones:
Definición. Se llama matriz de una aplicación proyectiva f : P(V )-----> P(V ) respecto de un
par de sistemas de referencia R, R de P(V ) y P(W ) a una matriz de una aplicación lineal
F : V → W que induzca f respecto a un par de bases B, B asociadas a R, R . Esta matriz
será única salvo multiplicación por constante. Dadas dos referencias proyectiva R, R de
un mismo espacio proyectivo, se llama matriz de cambio de referencia a una matriz de la
aplicación identidad en P(V ) respecto de las referencias R, R .
Ejemplo 7.7. Si tenemos una proyectividad entre dos espacios proyectivos P(V ) y P(W ),
entonces sabemos que una referencia R de P(V ) va a parar a una referencia R de P(W ).
Por tanto, la matriz de la proyectividad respecto de R y R es la identidad, es decir, el
punto de coordenadas (x0 : . . . : xn ) respecto de R va a parar al punto de coordenadas
(x0 : . . . : xn ) respecto de R . Recı́procamente, si tenemos una aplicación f : P(V ) →
P(W ) y un par de referencias proyectivas, R de P(V ) y R de P(W ), tal que el punto de
68
coordenadas (x0 : . . . : xn ) respecto de R va a parar al punto de coordenadas (x0 : . . . : xn )
respecto de R , entonces f es una proyectividad. En efecto, si {v0 , . . . , vn } y {w0 , . . . , wn }
son bases asociadas a R y R respectivamente, se tendrá que f corresponde al isomorfismo
V → W que manda el vector x0 v0 + . . . + xn vn al vector x0 w0 + . . . + xn wn .
Observación 7.8. Nótese que el segundo teorema fundamental de la geometrı́a proyectiva
es la generalización del Teorema 2.20, que es el que permitı́a definir razón doble de cuatro
puntos de una recta del plano proyectivo. Por tanto, tiene sentido dar la misma definición
de razón doble para cuatro puntos alineados en cualquier espacio proyectivo, y se tendrá
también el análogo del Teorema 3.4, es decir, que una aplicación inyectiva entre dos recta
es una proyectividad si y sólo si conserva la razón doble. En el leguaje de coordenadas,
se puede interpretar de otro modo. Dados cuatro puntos a, b, c, d de una recta L, la única
parametrización P1k → L que manda respectivamente (1 : 0), (0 : 1), (1 : 1) a los puntos
a, b, c es precisamente la proyectividad que consiste en tomar coordenadas respecto a la
referencia R = {a, b, c}. Entonces, si (ρ0 : ρ1 ) son las coordenadas homogéneas de d
respecto de R, la razón doble es por definición [a, b, c, d] = ρρ01 .
La fórmula de cálculo de la razón doble que dimos en el Lema 3.1 se puede generalizar.
La forma más sencilla de escribirla es que, dados a, b, c, d en una recta L, tomando cualquier
referencia proyectiva R sobre L, si las coordendas de a, b, c, d son respectivamente (a0 :
a1 ), (b0 : b1 ), (c0 : c1 ), (d0 : d1 ), entonces
a0
a1
[a, b, c, d] = a0
a1
c0 b0 d0 c1 b1 d1 .
d0 b0 c0 d1 b1 c1 Esto es simplemente porque la aplicación φR : P1k → L dada por las coordenadas respecto
de R es una proyectividad, luego conserva la razón doble.
El hecho de que la conservación de la razón doble caracterice las proyectividades
de rectas es precisamente el hecho de que las proyectividades están caracterizadas por
conservar coordenadas. En efecto, supongamos que tenemos una aplicacióon inyectiva f :
L → L entre dos rectas, y sean a, b, c ∈ L puntos distintos. Como f es inyectiva, entonces
f (a), f (b), f (c) son también distintos. Tenemos entonces una referencia R = {a, b, c} de L
y otra {f (a), f (b), f (c)} de L . Según el Ejemplo 7.7, f será una proyectividad si y sólo si
transforma cada punto de coordenadas (ρ0 : ρ1 ) respecto de R en el punto de coordenadas
(ρ0 : ρ1 ) respecto de R , lo que es equivalente a que f conserve la razón doble.
Esta última observación se puede generalizar a espacios proyectivos de dimensión
arbitraria, y nos permite caracterizar las proyectividades en términos exclusivamente de
geometrı́a proyectiva, sin necesidad de usar espacios vectoriales:
69
Teorema 7.9. Sea f : P(V ) → P(W ) una aplicación inyectiva entre espacios proyectivos.
Entonces f es una proyectividad entre P(V ) y f (P(V )) si y sólo si manda puntos alineados
en puntos alineados y conserva la razón doble de cuaternas de puntos alineados.
Demostración: Lo demostraremos por inducción sobre n = dim P(V ). Si n = 1, entonces
P(V ) es una recta, y por hipótesis su imagen está contenida en una recta, por lo que este
caso es el Teorema 3.4 (que acabamos de redemostrar en la Observación 7.8).
Supongamos ahora que n > 1 y que hemos demostrado el resultado para aplicaciones
que parten de un espacio proyectivo de dimensión n − 1. Obsérvese primero que una
implicación es inmediata: si f es una proyectividad sobre la imagen, manda rectas a
rectas, y la restricción a ellas es una proyectividad, luego conserva la razón doble.
Para la otra implicación, fijemos R = {p0 , p1 , . . . , pn , pn+1 }, una referencia proyectiva
de P(V ). Para cada i, j ∈ {0, 1, . . . , n, n + 1}, sean Λij =< p0 , . . . , p̂i , . . . , p̂j , . . . , pn+1 >
y pij =< pi , pj > ∩Λij . Por hipótesis de inducción, cada f|Λij es una proyectividad
sobre f (Λij ), que será un subsespacio de dimensión n − 1. Como f es inyectiva, entonces
f (pi ), f (pj ) son distintos y ninguno de ellos está en f (Λij ). Se tendrá, por tanto, f (pij ) =
< f (pi ), f (pj ) > ∩f (Λij ) y, en particular, f (P(V )) estará contenido en el subespacio
< f (p0 ), f (p1 ), . . . , f (pn ), f (pn+1 ) >=< f (Λij ), f (pi ), f (pj ) >, que tiene dimensión n.
El hecho de que cada f|Λij sea una proyectividad sobre F (Λij ) implica que los puntos
f (p0 ), f (p1 ), . . . , f (pn ), f (pn+1 ) están en posición general, y forman una referencia proyectiva de < f (p0 ), f (p1 ), . . . , f (pn ), f (pn+1 ) >. Consideramos entonces la única proyectividad F : P(V ) →< f (p0 ), f (p1 ), . . . , f (pn ), f (pn+1 ) > que manda cada pi a f (pi ). Veamos
que F = f , lo que completarı́a la demostración.
En primer lugar, para cada i, j es claro que los puntos p0 , . . . , p̂i , . . . , p̂j , . . . , pn+1 , pij
forman una referencia proyectiva de Λij . Por tanto f|Λij es la única proyectividad que
ˆ i ), . . . , f (p
ˆ j ), . . . , f (pn+1 ), f (pij ). Como F|Λ tammanda esa referencia en f (p0 ), . . . , f (p
ij
bién verifica lo mismo (para pij se hace como para f ), entonces f|Λij = F|Λij . Por tanto,
f (p) = F (p) para cualquier punto p ∈ P(V ) que esté en algún Λij .
Por otra parte, si un punto p ∈ P(V ) no está en ningún Λij , consideramos los puntos
p =< p, pn+1 > ∩Λ0,n+1 y q =< p, pn+1 > ∩Λn,n+1 . Usando que tanto f como F
conservan la razón doble, se tendrá
[f (p ), f (q ), f (pn+1 ), f (p)] = [p , q , pn+1 , p] =
= [F (p ), F (q ), F (pn+1 ), F (p)] = [f (p ), f (q ), f (pn+1 ), F (p)]
de donde se deduce (Observación 3.6) f (p) = F (p).
Observación 7.10. La hipótesis de conservar la razón doble es fundamental en el Teorema
7.9. Por ejemplo, la aplicación f : P2C → P2C definida por f (x0 : x1 : x2 ) = (x̄0 : x̄1 : x̄2 )
70
es claramente biyectiva, y la imagen de la recta de ecuación u0 x0 + u1 x1 + u2 x2 = 0 es la
recta de ecuación ū0 x0 + ū1 x1 + ū2 x2 = 0. Sin embargo, no se conserva la razón doble, ya
que, por ejemplo, [(0 : 1 : 0), (1 : 0 : 0), (1 : 1 : 0), (1 : λ : 0)] = λ, mientras que en cambio
[(0 : 1 : 0), (1 : 0 : 0), (1 : 1 : 0), (1 : λ̄ : 0)] = λ̄.
Definición. Se llama aplicación semilineal de espacios vectoriales a una aplicación F :
V → W para la que existe un automorfismo de cuerpos σ : k → k tal que F (v1 + v2 ) =
F (v1 ) + F (v2 ) y F (λv) = σ(λ)F (v). Se dice también que F es σ-semilineal. Si F es un
isomorfismo, diremos que es un σ-semiisomorfismo (en cuyo caso F −1 es una aplicación
σ −1 -semilineal).
Ejemplo 7.11. Fijada una base v0 , . . . , vn de V y un automorfismo de cuerpos σ : k → k,
la aplicación F0 : V → V definida por F0 (x0 v0 + . . . + xn vn ) = σ(x0 )v0 + . . . + σ(xn )vn es
un σ-semiisomorfismo.
Lema 7.12. Sea F0 : V → V un σ-semiisomorfismo y W un espacio vectorial sobre k.
La asignación F → F ◦ F0 define una biyección entre el conjunto de aplicaciones lineales
F : V → W y el conjunto de aplicaciones σ-semilineales F : V → W .
Demostración: Si F es una aplicación lineal, entonces se tendrá
F ◦ F0 (λ1 v1 + λ2 v2 ) = F (σ(λ1 )F0 (v1 ) + σ(λ2 )F0 (v2 )) = σ(λ1 )F (F0 (v1 )) + σ(λ2 )F (F0 (v2 ))
por lo que F ◦ F0 es una aplicación σ-semilineal.
Del mismo modo, si F : V → W es una aplicación σ-semilineal, se tendrá
F ◦ F0−1 (λ1 v1 + λ2 v2 ) = λ1 F (F0−1 (v1 )) + λ2 F (F0−1 (v2 ))
por lo que F ◦ F0−1 es una aplicación lineal. Por tanto, la asignación F → F ◦ F0−1 es la
asignación inversa de la dada, con lo que ambas son biyectivas.
Podemos repetir para aplicaciones semilineales todo lo que hemos visto para aplicaciones lineales. En concreto:
Definición. Se llama aplicación semiproyectiva o aplicación σ-semiproyectiva a una aplicación f : P(V ) → P(W ) definida por una aplicación σ-semilineal V → W no nula (es decir,
f ([v]) = [F (v)]). Si F es un semiisomorfismo, diremos que f es una σ-semiproyectividad.
Por el Lema 7.12, una aplicación semiproyectiva viene caracterizada por ser la composición
de una semiproyectividad y una aplicación proyectiva.
71
Teorema 7.13 (Primer teorema fundamental de la geometrı́a proyectiva). Una aplicación
f : P(V ) → P(W ) entre espacios proyectivos de dimensión al menos dos es una semiproyectividad entre P(V ) y f (P(V )) si y sólo si manda biyectivamente rectas a rectas.
Demostración: Es claro que una semiproyectividad manda biyectivamente rectas a rectas,
ası́ que basta ver que esta propiedad caracteriza a las semiproyectividades.
Sea pues f : P(V ) → P(W ) una aplicación inyectiva que manda biyectivamente rectas
a rectas. En particular, f es inyectiva, ya que si a = b, la recta ab va biyectivamente a
otra recta, por lo que f (a) = f (b).
Veamos que, si [a1 , b1 , c1 , d1 ] = [a2 , b2 , c2 , d2 ] para dos cuaternas de puntos alineados en
P(V ), entonces también [f (a1 ), f (b1 ), f (c1 ), f (d1 )] = [f (a2 ), f (b2 ), f (c2 ), f (d2 )]. En efecto,
la condición [a1 , b1 , c1 , d1 ] = [a2 , b2 , c2 , d2 ] es equivalente a que las cuaternas a1 , b1 , c1 , d1
y a2 , b2 , c2 , d2 se obtienen una de la otra a partir de un número finito de perspectividades. Como f manda puntos alineados en puntos alineados, se tendrá también que las
cuaternas f (a1 ), f (b1 ), f (c1 ), f (d1 ) y f (a2 ), f (b2 ), f (c2 ), f (d2 ) se obtienen una de la otra
a partir de un número finito de perspectividades. Por tanto, [f (a1 ), f (b1 ), f (c1 ), f (d1 )] =
[f (a2 ), f (b2 ), f (c2 ), f (d2 )].
Podemos entonces definir una aplicación σ : k → k tomando, para cada ρ ∈ k, una
cuaterna a, b, c, d ∈ P(V ) tal que [a, b, c, d] = ρ y definiendo σ(ρ) = [f (a), f (b), f (c), f (d)]
(como casos degenerados, definimos σ(0) = 0 y σ(1) = 1). Veamos en primer lugar que σ
es un automorfismo de cuerpos.
–Dados ρ1 , ρ2 ∈ k \ {0, 1}, sean a, b, c tres puntos distintos de P(V ) que estén sobre
una misma recta L. Tomamos d ∈ L tal que [a, b, c, d] = ρ1 . Como ρ1 = 0, 1, los puntos
a, b, d son distintos, luego existe e ∈ L tal que [a, b, d, e] = ρ2 . Por la Observación 3.11
tendremos
σ(ρ1 ρ2 ) = σ([a, b, c, d][a, b, d, e]) = σ([a, b, d, e]) =
= [f (a), f (b), f (c), f (e)] = [f (a), f (b), f (c), f (d)][f (a), f (b), f (d), f (e)] = σ(ρ1 )σ(ρ2 ).
Tenemos por tanto que σ(ρ1 ρ2 ) = σ(ρ1 )σ(ρ2 ) para todo ρ1 , ρ2 ∈ k (si algún ρi = 0, 1, el
resultado es trivial).
–Veamos ahora que σ(ρ1 +ρ2 ) = σ(ρ1 )+σ(ρ2 ) para todo ρ1 , ρ2 ∈ k\{0} (el caso en que
algún ρi = 0 es trivial). En este caso, podemos tomar tres puntos distintos a, b, c ∈ P(V )
sobre una misma recta L, y puntos d1 , d2 = a tales que [a, b, c, d1 ] = ρ1 y [a, b, c, d2 ] = ρ2 .
Como P(V ) tiene dimensión al menos dos (ésta es la parte crucial en que se usa), podemos
tomar un plano que contenga a L, y el Lema 3.11 nos permite construir geométricamente
un punto d ∈ L tal que [a, b, c, d] = [a, b, c, d1 ]+[a, b, c, d2 ]. Como f manda puntos alineados
a puntos alineados, mandará la figura del Lema 3.11 en una figura idéntica en P(V ), que
72
dará entonces [f (a), f (b), f (c), f (d)] = [f (a), f (b), f (c), f (d1 )] + [f (a), f (b), f (c), f (d2 )], es
decir, σ(ρ1 + ρ2 ) = σ(ρ1 ) + σ(ρ2 ).
–Con esto tenemos que σ es un homomorfismo de grupos (y en particular inyectivo).
Para ver que es suprayectivo, sea ρ ∈ k. Tomamos L ⊂ P(V ) una recta cualquiera. Por
hipótesis, f (L) es una recta. En particular, podremos encontrar a , b , c , d ∈ f (L) tales
que [a , b , c , d ] = ρ . Sean a, b, c, d ∈ L tales que f (a) = a , f (b) = b , f (c) = c y f (d) = d
y escribamos ρ = [a, b, c, d]. Se tendrá entonces σ(ρ) = ρ .
Sea ahora g : P(V ) → P(V ) cualquier σ-semiproyectividad. Se tendrá entonces que
f ◦ g es una aplicación inyectiva que manda puntos alineados en puntos alineados, y que
además conserva la razón doble. Por el Teorema 7.9, la aplicación f ◦ g −1 es una proyectividad sobre f ◦ g −1 (P(V )) = f (P(V )), lo que implica que f es una σ-semiproyectividad
sobre f (P(V )).
−1
En el caso en que el cuerpo base es k = R, el Teorema Fundamental caracteriza
las proyectividades de un espacio proyectivo (de dimensión al menos dos) como aquellas
aplicaciones que mandan biyectivamente rectas a rectas, ya que se tiene el siguiente:
Teorema 7.14. Sea σ : R → R un automorfismo de cuerpos. Entonces σ = idR .
Demostración: Por ser un automorfismo de cuerpos, σ(1) = 1, y por tanto
. . + 1) = 1 + .n)
.. + 1 = n
σ(n) = σ(1 + .n)
para todo n ∈ N. Como σ(−1) = −1, se sigue también que σ(a) = a para todo a ∈ Z. Si
tomamos ahora q = ab ∈ Q, se tendrá
bσ(q) = σ(b)σ(q) = σ(bq) = σ(a) = a = bq
por lo que σ(q) = q para cualquier q ∈ Q.
Veamos ahora que σ conserva el orden de los reales. En efecto, si α < β, entonces
podremos escribir β − α = 2 , para algún ∈ R positivo. Por tanto
σ(β) − σ(α) = σ(β − α) = σ(2 ) = σ()2 > 0
luego σ(α) < σ(β). Veamos finalmente que σ(α) = α para cualquier α ∈ R. En efecto, en
caso contrario, se tendrı́a α < σ(α) o σ(α) < α. Veamos que el primer caso es imposible,
siendo el segundo caso análogo. Si fuera α < σ(α), como los racionales son densos en Q,
podrı́amos encontrar q ∈ Q tal que α < q < σ(α). Pero eso es imposible, ya que, según
hemos visto, la desigualdad α < q implica la desigualdad σ(α) < σ(q) = q.
73
En el caso k = C, el resultado anterior no es cierto, ya que la conjugación es un
automorfismo. No es el único automorfismo distinto de la identidad (aunque sı́ es el único
continuo). De hecho, existem infinitos automorfismos de C, aunque no son fáciles de
construir.
Damos ahora una definición que de nuevo parece artificial porque necesita pasar por
el espacio vectorial, pero que otra vez más la razón doble nos permitirá hacer de forma
intrı́nseca.
Definición. Dada una referencia proyectiva R de un espacio proyectivo P(V ), se llama
referencia dual a la única referencia proyectiva R∗ de P(V )∗ que tiene como base asociada
una base dual de una base asociada a R.
Proposición 7.15. Sea R = {p0 , . . . , pn , pn+1 } una referencia proyectiva de un espacio
proyectivo P(V ). Entonces, la referencia dual R∗ = {H0 , . . . , Hn , Hn+1 } consiste en los
hiperplanos:
H0 =< p1 , . . . , pn >
..
.
Hn =< p0 , . . . , pn−1 >
y Hn+1 es el único hiperplano que contiene a los puntos pij donde pij es el cuarto armónico
respecto de los puntos pi , pj , < pi pj > ∩ < R \ {pi , pj } >.
Demostración: Escribimos todo en coordenadas respecto de la referencia R. Entonces la
referencia dual consiste en los hiperplanos
H0 : X0 = 0
..
.
Hn : Xn = 0
Hn+1 : X0 + . . . + Xn = 0.
Evidentemente, H0 , . . . , Hn consiste en los hiperplanos del enunciado, ası́ que basta comprobar que Hn+1 es el del enunciado. Para cada i, j ∈ {0, . . . , n} (supondremos i < j), el
hiperplano < R \ {pi , pj } > tiene ecuación Xi − Xj = 0, con lo que su intersección con la
i)
j)
recta < pi , pj > tiene coordenadas (0 : . . . : 0 : 1 : 0 . . . 0 : 1 : 0 : . . . : 0), luego el punto pij
i)
j)
tiene coordenadas (0 : . . . : 0 : 1 : 0 . . . 0 : − 1 : 0 : . . . : 0). Es entonces claro queHij es el
hiperplano generado por los puntos pij .
74
Proposición 7.16. Sea f : P(V )-----> P(W ) una aplicación proyectiva que tiene matriz
A respecto de las referencias R y R . Entonces, la aplicación f ∗ : P(W )∗ -----> P(V )∗ que
asocia a cada hiperplano H ⊂ P(W ) que no contiene a Im f el hiperplano f −1 (H ) ⊂ P(V )
es una aplicación proyectiva de centro Ω(Im f ), y su matriz respecto de las referencias R∗
y R∗ es At (i.e. la matriz transpuesta de A).
Demostración: Que A sea la matriz de f respecto de R y R quiere decir que el punto de
coordenadas (x0 : . . . : xn ) respecto de R se transforma por f en el punto de coordenadas
(x0 : . . . : xm ) respecto de R , con
x0
x0
..
..
.
. =A
.
xn
xm
(7.17)
Sea ahora el hiperplano H ⊂ P(W ) de ecuación u0 X0 + . . . + um Xm
= 0 respecto de R .
Un punto de P(V ) de coordenadas (x0 : . . . : xn ) respecto a R estará en f −1 (H ) si y sólo si
u0 x0 + . . . + um xm = 0, donde (x0 : . . . : xm ) vienen dados por (7.17). Esto es equivalente
a decir que
x0
.
(u0 . . . um )A .. = 0
xn
es decir, el punto de coordenadas (x0 : . . . : xn ) pertenece al hiperplano de coeficientes
(u0 . . . un ) = (u0 . . . um )A (obsérvese que los coeficientes son todos no nulos si y sólo si
H no contiene a la imagen de f ). De aquı́ se concluye que el hiperplano de coordenadas
(u0 : . . . : um ) respecto de R∗ se transforma mediante f ∗ en el hiperplano de coordenadas
(u0 : . . . : un ) respecto de R∗ , con
u0
... = A
un
u0
..
.
um
lo que demuestra el resultado.
Definición. Se llama aplicación dual de una aplicación proyectiva f : P(V )-----> P(W ) a la
aplicación f ∗ : P(W )∗ -----> P(V )∗ definida en la Proposición 7.16.
75
8. Clasificación de proyectividades
Clasificar proyectividades quiere decir encontrar una representación sencilla de ellas
respecto de alguna referencia proyectiva. Ya vimos en el Ejemplo 7.7 que, usando buenas
referencias en los espacios proyectivos de salida y llegada de la proyectividad, la matriz de
la proyectividad es más sencilla. Por tanto, plantearse el problema de una representación
sencilla sólo tiene sentido si las referencias de los dos espacios proyectivos están relacionadas
entre sı́. El caso más natural es cuando ambas referencias son iguales, es decir, cuando lo
que queremos es clasificar proyectividades de un espacio proyectivo en sı́ mismo.
Observación 8.1. Sea f : P(V ) → P(V ) una proyectividad. Si fijamos una referencia
proyectiva R de P(V ), entonces f tendrá una cierta matriz A respecto de R. Si cambiamos
la referencia R a otra R y la matriz P define el cambio de sistema de referencia, entonces
P −1 AP es (salvo proporcionalidad) la matriz de f respecto de R . Por tanto, las posibles
matrices sencillas de proyectividades estarán en clases de equivalencia de matrices por
semejanza, es decir, corresponderán a las posibles formas canónicas de Jordan.
Las formas canónicas de Jordan se calculan a partir de autovectores y autovalores.
Veamos que se trata de una noción natural en el contexto de las proyectividades:
Lema 8.2. Sea f : P(V ) → P(V ) una proyectividad determinada por un automorfismo
F : V → V . Entonces un vector v ∈ V \ {0} es un autovector de F si y sólo si [v] es un
punto invariante por f (i.e. f ([v]) = [v]).
Demostración: Recordemos que, por definición, f ([v]) = [F (v)], luego [v] es invariante
por f si y sólo si [F (v)] = [v], es decir, si y sólo si existe λ = 0 tal que F (v) = λv, es
decir, si y sólo si v es un autovector de autovalor λ (obsérvese que necesariamente todos
los autovalores de F son no nulos, por ser F un isomorfismo).
Observación 8.3. Dado que, fijada una referecia proyectiva de P(V ) la matriz de una
proyectividad de P(V ) respecto de dicha referencia es única salvo proporcionalidad, siempre
que tengamos un autovalor en k (lo que es cierto siempre que k sea algebraicamente cerrado,
por ejemplo si k = C), dividiendo por él podemos suponer que 1 es un autovalor. Esto
permite simplificar la clasificación de proyectividades.
Ejemplo 8.4. Veamos por ejemplo cuál serı́a la clasificación de las proyectividades de
una recta cuando k es un cuerpo algebraicamente cerrado, usando la simplificación de la
Observación 8.3. Suponiendo entonces que un autovalor es 1, las posibles formas canónicas
de Jordan serı́an:
76
1) Si hay un único autovalor
multiplicidad dos) y la matriz es diagonalizable, la
(con 1 0
forma canónica de Jordan serı́a
. En este caso, la proyectividad serı́a la identidad.
0 1
2) Si hayun autovalor
doble y la matriz no es diagonalizable, la forma canónica de
1 0
Jordan serı́a
.
1 1
1 0
3) Si hay dos autovalores distintos, la forma canónica de Jordan serı́a
, con
0 λ
λ = 1.
Obsérvese que si k no fuera algebraicamente cerrado (el caso natural en que pensar es
k = R), entonces tanto en el caso 1 como en el 2 el único autovalor está necesariamente
en k. Sin embargo, en el caso 3 hay que distinguir dos subcasos: que los dos autovalores
estén en k o que ambos sean imaginarios (conjugados, si k = R).
Veamos ahora la descripción geométrica de cada uno de los casos anteriores no triviales.
Lema 8.5. Sea f : L → L una proyectividad
deuna recta proyectiva L cuya matriz
1 0
. Entonces, f tiene un único punto
respecto de alguna referencia proyectiva es
1 1
invariante p0 , y se tiene que
[p0 , p, f (p), f (f (p))] = 2
para cualquier p ∈ L \ {p0 }. Por tanto, f está determinada conociendo p0 y la imagen de
un punto distinto de él.
1 0
Demostración: En las coordenadas respecto a las cuales la matriz de f es
, se tiene
1 1
inmediatamente que p0 = (0 : 1) es el único punto invariante. Un punto p distinto de p0 se
puede escribir con coordenadas (1 : a), luego f (p) tendrá coordenadas (1 : a + 1), y f (f (p))
tendrá coordenadas (1 : a+2). Se calcula entonces fácilemente que [p0 , p, f (p), f (f (p))] = 2.
Por tanto, conocidos p0 y la imagen de un punto p = p0 , la fórmula anterior permite
conocer también la imagen de f (p), con lo que tenemos la imagen de tres puntos, lo que
determina de forma unı́voca la proyectividad f .
El tercer caso lo estudiamos en una situación más general, que nos será útil más
adelante:
Lema 8.6. Sea f : P(V ) → P(V ) una proyectividad de un espacio proyectivo P(V ) de
dimensión n. Supongamos que existe una referencia proyectiva R de P(V ) en la cual f viene
77
representada por una matriz diagonal
1
..
. r+1)
1
λ
..
con λ = 1. Entonces,
. n−r)
λ
existen subespacios proyectivos disjuntos Λ, Λ ⊂ P(V ) de dimensiones r y n − r − 1 tales
que cada punto de ellos es invariante por f y, para cada p ∈ P(V ) \ (Λ ∪ Λ ), su imagen
f (p) está caracterizada por la condición
[p0 , p1 , p, f (p)] = λ
donde p0 =< p, Λ > ∩ Λ , p1 = Λ∩ < Λ , p >. En particular, si P(V ) es una recta, existen
puntos invariantes p0 , p1 tales que [p0 , p1 , p, f (p)] = λ para todo p = p0 , p1 .
Demostración: Tomamos coordenadas respecto de una referencia R como en la hipótesis.
Entonces, la expresión de f será de la forma
f (x0 : . . . : xn ) = (x0 : . . . : xr : λxr+1 : . . . : λxn ).
Es entonces evidente que los subespacios Λ : Xr+1 = . . . = Xn = 0 y Λ : X0 = . . . = Xr =
0 están formados por puntos invariantes. Dado un punto p = (a0 : . . . : an ) que no esté ni
en Λ ni en Λ , es fácil ver (en realidad está hecho en el Ejemplo 7.5) que
p0 = (0 : . . . : 0 : ar+1 : . . . : an ) y p1 = (a0 : . . . : ar : 0 : . . . : 0).
Tomando {p0 , p1 , p} como sistema de referencia de la recta < p0 , p1 >, es claro que f (p) =
(a0 : . . . : ar : λar+1 : . . . : λan ) tiene coordenadas (λ : 1), de lo que se sigue que
[p0 , p1 , p, f (p)] = λ.
En general, nos interesarán no sólo subespacios de puntos fijos (como en el resultado
anterior), sin más en general subespacios que se transformen en ellos mismos, pero no
necesariamente punto a punto:
Definición. Dada una proyectividad f : P(V ) → P(V ), se llama subespacio invariante a
un subespacio Λ ⊂ P(V ) tal que f (Λ) = Λ. Obsérvese que, como f (Λ) tiene la misma
dimensión que Λ, basta comprobar sólo que f (Λ) ⊂ Λ.
Para hiperplanos, la situación es bien sencilla:
78
Lema 8.7. Sea f : P(V ) → P(V ) una proyectividad y sea H ⊂ P(V ) un hiperplano.
Entonces, H es un hiperplano invariante si y sólo si es un punto invariante de la aplicación
dual f ∗ : P(V )∗ → P(V )∗ .
Demostración: Como f es biyectiva, es claro que f (H) = H si y sólo si H = f −1 (H), lo
que es equivalente a que H sea un punto fijo de f ∗ .
Observación 8.8. Dada una proyectividad f : P(V ) → P(V ) definida por una matriz
A respecto de una referencia R, la aplicación dual viene dada por la matriz At respecto
de la referencia dual R∗ (Proposición 7.16). Recuérdese que la forma canónica de Jordan
de A está determinada a partir de los rangos de las potencias (A − λI)i , que son iguales
a los rangos de (At − λI)i , luego A y At tienen la misma forma canónica de Jordan. En
particular, hay una biyección entre el conjunto de puntos invariantes y el de hiperplanos
invariantes (incluso autovalor a autovalor). Veamos a continuación cómo usar esto de modo
práctico.
P3R
→ P3R la proyectividad definida, respecto de la referencia
0 −1 0
0
0
0
1 2
canónica, por la matriz
. Nuestro objetivo es calcular todos los subes0 0 −1 0
0 0
0 −1
pacios invariantes por f . Un simple cálculo muestra que los autovalores son ±1 (cada uno
doble) y que, para el autovalor λ = 1, se obtiene el punto invariante (1 : −1 : 0 : 0)
y para λ = −1 se obtiene la recta X0 = X1 = 0 de puntos invariantes. Un modo de
obtener subespacios invariantes es considerando subespacios generados por subespacios
invariantes. En nuestro caso, el único plano que se obtiene ası́ es el plano X0 + X1 =
0, generado por todos los puntos invariantes que hemos encontrado. Sin embargo, por
la observación anterior sabemos que tiene que haber infinitos planos invariantes. Para
calcularlos, transponemos la matriz anterior y calculamos los subespacios propios. Para
λ = 1 obtenemos (u0 : u1 : u2 : u3 ) = (1 : 1 : 0 : 0), es decir, de nuevo el plano X0 +X1 = 0.
∗
Si en cambio calculamos el subespacio propio de λ = −1, obtenemos la recta de P3R de
ecuaciones U0 = U1 = 0, que corresponde al haz de planos de P3R que contienen a la recta
X2 = X3 . Veamos ahora cómo podemos encontrar rectas invariantes a partir de los puntos
y planos invariantes ya hallados:
Ejemplo 8.9.
Sea f :
1) La recta X0 = X1 = 0 de puntos invariantes es evidentemente invariante.
2) La recta X2 = X3 = 0 es invariante por ser intersección de planos invariantes.
3) Todas las rectas del plano X0 + X1 = 0 que pasan por el punto (1 : −1 : 0 : 0) son
invariantes, ya que están generadas por (1 : −1 : 0 : 0) y su intersección con X0 = X1 = 0
(que es necesariamente un punto, distinto de (0 : 1 : 0 : 0) y además invariante). Estas
79
rectas también pueden verse como la intersección del plano invariante X0 + X1 = 0 con un
plano que contenga a X2 = X3 (y por tanto también invariante).
Éstas son todas las formas de obtener rectas invariantes a partir de intersecciones de planos
invariantes o como rectas generadas por dos puntos invariantes, pero en principio podrı́an
no ser todas (como pasaba con los planos invariantes obtenidos a partir de los puntos
invariantes). Un modo más exhaustivo de encontrar rectas invariantes es el de restringir la
proyectividad a un plano invariante y calcular todos los hiperplanos invariantes de dicha
restricción. Veamos lo que obtenemos en nuestro caso:
–Si restringimos al plano X0 + X1 = 0, tomamos en él coordenadas x1 , x2 , x3 (usando
que x0 = −x1 ), y tendremos entonces la expresión
(−x1 : x1 : x2 : x3 ) → (−x1 : x1 : −x2 : −x3 )
o, en forma matricial,
1
x1
x2 → 0
x3
0
0
−1
0
0
x1
x2 .
0
x3
−1
El autovalor λ = 1 de esta nueva matriz nos da el punto y la recta invariante de coordenadas
(1 : 0 : 0), que son respectivamente el punto (−1 : 1 : 0 : 0) (que ya sabı́amos que era
invariante) y la recta X0 = X1 = 0 (que también sabı́amos que era invariante). Por otra
parte, el autovalor λ = −1 nos da como puntos invariantes los de la recta de ecuación
X1 = 0 (dentro del plano X0 + X1 = 0, es decir, de nuevo la recta X0 = X1 = 0), y como
rectas invariantes las que verifican la ecuación U1 = 0, es decir, las que pasan por el punto
de coordenadas (1 : 0 : 0), que son precisamente las rectas de X0 + X1 = 0 que pasan por
(−1 : 1 : 0 : 0) (que de nuevo ya sabı́amos que eran invariantes).
–Si restringimos a un plano que contenga a la recta X2 = X3 = 0, las cuentas son más
complicadas porque tenemos infinitos de estos planos, y deberı́amos hacer depender todo
de un parámetro. Para evitar dichas cuentas, utilizaremos la Observación 8.8. Fijemos en
primer lugar un plano Π que contenga a la recta X2 = X3 = 0. Los puntos invariantes de
f|Π ya los sabemos, ya que son los puntos de intersección de Π con el conjunto de puntos
invariantes de f . Obtenemos entonces que f|Π tiene exactamente dos puntos invariantes:
el punto (1 : −1 : 0 : 0) y la intersección de Π con la recta X0 = X1 = 0 (que es sólo
un punto, ya que en caso contrario Π contendrı́a a toda la recta X0 = X1 = 0, aparte
de a la recta X2 = X = 3 = 0, que sin embargo generan todo P3R ). Por tanto, por la
Observación 8.8, f|Π tiene exactamente dos rectas invariantes. Como ya conocemos dos
(la recta X2 = X3 = 0 y la intersección de Π con X0 + X1 = 0), ya sabemos que no hay
más.
Si supiéramos que todas las rectas invariantes están contenidas en algún plano invariante, en el ejemplo anterior habrı́amos encontrado todas las rectas invariantes. Veamos
80
que, en efecto, es ası́:
Lema 8.10. Sea f : P(V ) → P(V ) una proyectividad de espacios proyectivos sobre un
cuerpo algebraicamente cerrado k. Entonces cada subespacio invariante contiene un punto
invariante y está contenido en un subespacio invariante.
Demostración: Veamos primero que cada subespacio invariante contiene un punto invariante. En efecto, si Λ ⊂ P(V ) es un subespacio invariante por f , entonces f|Λ es una
proyectividad de Λ en sı́ mismo. Como k es algebraicamente cerrado, cualquier endomorfismo que induzca f|Λ tiene al menos un autovector no nulo (ya que tiene algún autovalor),
y por el Lema 8.2, f|Λ tiene algún punto invariante, es decir, Λ contiene algún punto
invariante por f .
Veamos ahora que existe algún hiperplano invariante que contiene a Λ. En primer
lugar, observamos que, como f (Λ) = Λ (o equivalentemente f −1 (Λ) = Λ), entonces para
cualquier hiperplano H que contenga a Λ se tiene que f −1 (H) también contiene a Λ. Esto
quiere decir que Ω(Λ) es un subespacio invariante de la proyectividad f ∗ : P(V )∗ → P(V )∗ .
Por la parte que acabamos de demostrar, existirá H ∈ Ω(Λ) invariante por f ∗ , es decir, H
es un subespacio invariante de f que contiene a Λ.
Observación 8.11. El lector puede pensar que el lema anterior no se puede aplicar al
Ejemplo 8.9, porque R no es algebraicamente cerrado. Sin embargo, como R está dentro
de C, que es algebraicamente cerrado, y en realidad hemos calculado todos los subespacios
invariantes de la proyectividad de P3C en sı́ mismo definida por la misma matriz, f no tiene
más rectas invariantes (ni siquiera imaginarias). Un buen ejemplo de esta observación es
considerar la proyectividad de P3R en sı́ mismo definida por la matriz
0
−1
1
0
1 0
0 0
0 0
0 −1
0
0
.
1
0
Es un simple cálculo comprobar que sus autovalores son λ = i, que da el punto invariante
(0 : 0 : 1 : −i) y el plano invariante X0 − iX1 = 0, y λ = −i, que da el punto invariante
(0 : 0 : 1 : i) y el plano invariante X0 + iX1 = 0. Por tanto, la proyectividad no tiene
ni puntos ni planos reales invariantes. Sin embargo, en el plano X0 − iX1 = 0 (donde
(0 : 0 : 1 : i) y (0 : 0 : 1 : −i) son puntos invariantes) tenemos las rectas invariantes
X0 = X1 = 0 y X0 − iX1 = X2 − iX3 = 0, y en el plano X0 + iX1 = 0 (donde (0 : 0 : 1 : i)
y (0 : 0 : 1 : −i) son puntos invariantes) tenemos las rectas invariantes X0 = X1 = 0 y
X0 + iX1 = X2 + iX3 = 0. Por tanto, la proyectividad tiene una recta invariante real,
que es X0 = X1 = 0 (que podı́a haberse obtenido también como la recta generada por los
81
dos puntos invariantes o como la intersección de los dos planos invariantes; nótese también
que ninguna de las rectas invariantes imaginarias podrı́an haberse obtenido directamente
a partir de los puntos y planos invariantes).
En los siguientes dos resultados estudiaremos tipos particulares de proyectividades de
un espacio proyectivo.
Definición. Una proyectividad involutiva es una proyectividad f : P(V ) → P(V ) tal que
f ◦ f = idP(V ) .
Teorema 8.12. Sea f : P(V ) → P(V ) una proyectividad y supongamos que k es algebraicamente cerrado. Entonces son equivalentes:
(i) f es una proyectividad involutiva.
(ii) Existe una referencia proyectiva de P(V ) en la que f se representa por una matriz
diagonal con sólo unos y menos unos.
(iii) Existen subespacios proyectivos disjuntos Λ, Λ ⊂ P(V ) de dimensiones r y n − r − 1
tales que cada punto de ellos es invariante y, para cada p ∈ P(V ) \ (Λ ∪ Λ ), el punto
f (p) es el cuarto armónico de los puntos < p, Λ > ∩ Λ , Λ∩ < Λ , p > y p.
Demostración:
(i) ⇒ (ii): Sea F : V → V un isomorfismo que defina a f (que como dijimos en la
Observación 8.3 podemos suponer que tiene a 1 como autovalor). La condición f ◦ f =
idP(V ) (por ser f involutiva) equivale a decir que existe λ ∈ k tal que F ◦ F = λidV . Como
1 es un autovalor de F , existirá v ∈ V \ {0} tal que F (v) = v. Por tanto, λv = F (F (v)) =
F (v) = v, lo que implica λ = 1. Entonces, la condición F ◦ F = idV puede escribirse
también como (F − idV ) ◦ (F + idV ) = 0, o equivalentemente Im(F + idV ) ⊂ ker(F − idV ).
Tomando dimensiones y usando la igualdad dim V = dim(ker(F +idV ))+dim(Im(F +idV ))
llegamos a que dim(ker(F − idV )) + dim(ker(F + idV )) ≥ dim V . Como ker(F − idV ) ∩
ker(F + idV ) = 0 (son los subespacios propios de los autovalores 1 y −1, se concluye que
V es la suma directa de ker(F − idV ) y ker(F + idV ). Tomando una base formada por la
unión de una base de ker(F − idV ) y otra de ker(F + idV ) se obtiene que la matriz de F
respecto de esa base es diagonal con unos y menos unos en la diagonal.
(ii) ⇒ (iii): Es el Lema 8.6 cuando λ = −1.
(iii) ⇒ (i): Es claro que, si p están en Λ o Λ , entonces f (f (p)) = f (p) = p, ası́ que
basta comprobar la igualdad f (f (p)) = p para puntos que no estén en Λ ∪ Λ . Si llamamos p0 =< p, Λ > ∩ Λ , p1 = Λ∩ < Λ , p >, se tiene por hipótesis [p0 , p1 , p, f (p)] =
−1 y [p0 , p1 , f (p), f (f (p))] = −1. Entonces, por la Observación 3.9, se tiene también
[p0 , p1 , f (f (p)), f (p)] = −1 y la Observación 3.6 se sigue que f (f (p)) = p
82
Teorema 8.13. Sean P(V ) un espacio proyectivo de dimensión n ≥ 2 y f : P(V ) → P(V )
una proyectividad distinta de la identidad. Entonces, si existe un hiperplano H ⊂ P(V )
de puntos invariantes, se da una de las siguientes situaciones:
(i) Existe otro punto invariante p0 ∈ H y una constante λ = 0, 1 tal que para cada
p ∈ H ∪ {p0 } se verifica que f (p) es el único punto de la recta < p0 , p > para el que
[< p0 , p > ∩H, p0 , p, f (p)] = λ.
(ii) No hay más puntos invariantes por f aparte de los de H, y conocidos un punto p1 ∈ H
y su imagen f (p1 ), si p0 =< p1 , f (p1 ) > ∩H, entonces f está determinada de la forma
siguiente (si dim P(V ) ≥ 2): para cada p ∈ H∪ < p1 , f (p1 ) >, si q =< p1 , p > ∩H, se
tiene f (p) =< p0 , p > ∩ < q, f (p1 ) >.
Demostración: El que haya un hiperplano H de puntos invariantes equivale a decir que
existe todo un hiperplano en V de vectores propios de un automorfismo de V que defina
f . Este hiperplano corresponderá entonces a un autovalor λ de multiplicidad al menos n.
Se pueden dar entonces dos casos:
Caso i) El autovalor λ tiene multiplicidad exactamente n, con lo que hay otro autovalor,
que (ver la Observación 8.3) supondremos que es 1 (por tanto, λ = 1, y tampoco es cero
por tratarse de un isomorfismo). Entonces la forma canónica de Jordan es diagonal (ya
que la dimensión del subespacio propio correspondiente a λ es precisamente n) y estamos
en el caso particular del Lema 8.6 en que r = 0, con lo que Λ es un punto p0 .
Caso ii) El autovalor λ tiene multiplicidad n + 1, y por tanto es el único autovalor (que,
de nuevo por la Observación 8.3, supondremos λ = 1. Se tiene entonces que la matriz de
Jordan J no es diagonal, pero como J − I debe tener rango uno debe ser:
1
1
J =
.
1
1
..
.
1
Sea R una referencia proyectiva de P(V ) respecto de la cual la matriz J represente a f .
Usando coordenadas respecto de R, H será el hiperplano de ecuación X0 = 0. Supongamos
que el punto p1 tenga coordenadas (1 : a1 : . . . : an ) (podemos suponer que la primera
coordenada no es nula, por no estar p1 en H). Entonces es un simple ejercicio comprobar
que f (p1 ) = (1 : a1 + 1 : a2 : . . . : an ) y que el punto p0 =< p1 , f (p1 ) > ∩H tiene
coordenadas (0 : 1 : 0 : . . . : 0) (obsérvese en particular que p0 no depende del punto p1
escogido). Tomemos ahora un punto arbitrario p ∈ H∪ < p1 , f (p1 ) >. Como acabamos
de observar, la intersección de < p, f (p) > con H debe ser el mismo punto p0 , luego f (p)
está en la recta < p0 , p >. Es también evidente que, como p está en la recta < p1 , q >,
83
entonces f (p) también está en < f (p1 ), f (q) >=< f (p1 ), q >. Como las rectas < p0 , p >
y < f (p1 ), q > son distintas (porque p no está en la recta < p0 , f (p1 ) =< p0 , p1 >) y
dos rectas distintas se cortan como mucho en un punto, se sigue que la intersección de
< p0 , p > y < q, f (p1 ) > es exactamente f (p).
Definición. Se llama homologı́a de centro p0 y eje el hiperplano H0 a una proyectividad de
P(V ) como en el teorema anterior. Una homologı́a como en el caso (i) se llama homologı́a
general, y λ se llama razón de la homologı́a. Una homologı́a como en el caso (ii) se llama
homologı́a especial.
Observación 8.14. Está claro que una homologı́a general está completamente determinada a partir del centro, eje y razón. En principio, una homologı́a especial parece determinada a partir del eje y de la imagen de un punto p1 (lo que determina automáticamente el
centro) sólo para puntos fuera de la recta < p1 , f (p1 ) >. Sin embargo, una vez conocida la
imagen de un punto p1 fuera de la recta < p1 , f (p1 ) >, haciendo jugar ahora a p1 el papel
de p1 , podemos conocer la imagen de cualquier punto fuera de < p1 , f (p1 ) >, en particular
de cualquier punto de < p1 , f (p1 ) >. Por eso es fundamental la hipótesis n ≥ 2, que hace
que en el caso n = 1 la situación sea menos completa (ver el Lema 8.5).
84
9. Correlaciones y cuádricas
La mejor forma de explicar lo que queremos hacer en este capı́tulo es revisar, con el
lenguaje de la geometrı́a proyectiva, la noción de polaridad respecto de una cónica que
vimos en el capı́tulo 4:
Ejemplo 9.1. Sea C una cónica no degenerada de P2 de ecuación
X0
(X0 X1 X2 )A X1 = 0
X2
(donde A es una matriz simétrica no degenerada). Sea f : P2 → P2 la aplicación que
asocia a cada punto de P2 su recta polar respecto de C. Entonces, f es una proyectividad.
En efecto, si C es la cónica, sabemos que la recta polar del punto (a0 : a1 : a2 ) es
X0
(a0 a1 a2 )A X1 = 0
X2
∗
es decir, la recta u0 X0 + u1 X1 + u2 X2 = 0, donde (u0 u1 u2 ) = (a0 a1 a2 )A. Como A es
simétrica, también podemos escribir
a0
u0
u1 = A a1
u2
a2
lo que indica que f es la proyectividad de matriz A tomando la referencia canónica de
∗
y su referencia dual en P2 .
P2
Sin embargo, no todas las proyectividades de P2 en P2 son una polaridad. Por
∗
ejemplo, la proyectividad f : P2R → P2R que asocia a cada punto (a0 : a1 : a2 ) la recta
a1 X0 − a0 X1 + a2 x2 = 0 no puede ser la polaridad respecto de una cónica. En efecto, la
imagen del punto a = (0 : 1 : 1) es la recta f (a) de ecuación X0 + X2 = 0, que contiene al
punto b = (1 : 1 : −1), mientras que la imagen del punto b es la recta X0 − X1 − X2 = 0,
que no contiene al punto a. Por tanto, f no verifica la propiedad (ii) de la Proposición
4.6, por lo que no es la polaridad respecto de una cónica. El problema con este ejemplo
(como explicaremos en este capı́tulo)
es que ftiene como matriz, respecto de las referencias
0 1 0
canónica y su dual, a la matriz −1 0 0 , que no es simétrica.
0 0 1
Una primera justificación de la observación anterior es que la polaridad respecto de
una cónica no degenerada C ⊂ P2k de matriz A se puede definir de la siguiente forma.
∗
85
Consideramos la forma bilineal B : k 3 × k 3 → k definida por
Y0
B((X0 , X1 , X2 ), (Y0 , Y1 , Y2 )) = (X0 X1 X2 )A Y1 .
Y2
Entonces la recta polar respecto de C de un punto (a0 : a1 : a2 ) es la recta de ecuación
B((X0 , X1 , X2 ), (a0 , a1 , a2 )) = 0. En particular, el punto (b0 : b1 : b2 ) está en la recta
polar de (a0 : a1 : a2 ) si y sólo si B((b0 , b1 , b2 ), (a0 , a1 , a2 )) = 0, mientras que el punto
(a0 : a1 : a2 ) está en la recta polar de (b0 : b1 : b2 ) si y sólo si B((a0 , a1 , a2 ), (b0 , b1 , b2 )) = 0.
Por tanto, la propiedad (ii) de la Proposición 4.6 parece equivalente a que B sea una forma
bilineal simétrica, es decir, que A sea simétrica.
Nótese, finalmente, que la cónica C está determinada perfectamente por la forma
bilineal B (o, más precisamente, por su forma cuadrática asociada), ya que su ecuación es
precisamente B((X0 , X1 , X2 ), (X0 , X1 , X2 )) = 0.
En este capı́tulo nos proponemos estudiar generalización de cónica proyectiva (que,
como en geometrı́a afı́n, será la noción de cuádrica) y la noción de polaridad, que será
una aplicación proyectiva de un espacio proyectivo en su dual (pero no cualquiera, ya que
tendrá que verificar alguna condición de simetrı́a). Empezamos con una definición:
Definición. Llamaremos correlación a una aplicación proyectiva f : P(V )-----> P(V )∗ y
correlación no degenerada a una correlación que además sea una proyectividad (esta notación no es universal, y muchos autores llaman correlación a lo que nosotros llamamos
correlación no degenerada).
Observación 9.2. Veamos (por el momento en coordenadas) que la noción de correlación
f : P(V )-----> P(V )∗ no es más que la generalización a dimensión arbitraria de lo que hemos
visto en el Ejemplo 9.1. Para ello, fijamos una referencia proyectiva R de P(V ), tomamos
la referencia dual R∗ de P(V )∗ y consideramos A una matriz de f respecto de R y R∗ . Esto
quiere decir que, si un punto p (fuera del centro de f ) tiene coordenadas (a0 : . . . : an )
a0
.
respecto de R, entonces f (p) es el hiperplano coordenadas A .. respecto de R, es
an
decir, el hiperplano de ecuación
a0
.
(X0 . . . Xn )A .. = 0
an
respecto de R. En otras palabras, un punto de coordenadas (b0 : . . . : bn ) pertenece al
86
hiperplano f (p) si y sólo si
a0
.
(b0 . . . bn )A .. = 0.
an
a0
0
..
..
=
Obsérvese que, si p estuviera en el centro de f , entonces A
. , con lo que
.
0
an
la relación anterior se verifica para cualquier punto de coordenadas (b0 : . . . : bn ). Por
abuso de notación, diremos en tal caso que f (p) es todo P(V ). De esta forma, dar una
correlación es equivalente a dar una matriz A, y la imagen por la correlación de un punto
de coordenadas (a0 : . . . : an ) es el conjunto de puntos de coordenadas (b0 : . . . : bn ) para
los que se verifica la relación anterior.
También puede verse la correlación por medio de una forma bilineal. En efecto, basta
fijar una base asociada a la referencia R y definir B : V × V -----> k mediante
Y0
.
B(u, v) = (X0 . . . Xn )A ..
Yn
donde X0 , . . . , Xn e Y0 , . . . , Yn son respectivamente las coordenadas de u y v respecto de
dicha base. De este modo, la imagen por la correlación del punto [v] es el conjunto de
puntos de [u] que verifican B(u, v) = 0.
Dicho sin coordenadas, lo que tenemos es el siguiente resultado de Álgebra Lineal:
Proposición 9.3. Sea V un espacio vectoria sobre un cuerpo k. Entonces:
(i) Dado un homomorfismo F : V → V ∗ , la aplicación BF : V × V → k definida por
BF (u, v) = (F (v))(u) es una forma bilineal.
(ii) Dada una forma bilineal B : V × V → k, la aplicación FB : V → V ∗ definida por
FB (v) : V
u
→
→
k
B(u, v)
es una aplicación lineal.
Además, las asignaciones F → BF y B → FB definen biyecciones (una inversa de la otra)
entre el conjunto de homomorfismos V → V ∗ y el conjunto de formas bilineales V ×V → k.
Demostración: Se deja como ejercicio.
Definición. Llamaremos correlación asociada a una forma bilineal no nula B : V × V → k
a la correlación definida por el homomorfismo FB : V → V ∗ de la proposición anterior.
87
Observación 9.4. Por la Proposición 9.3, la correlación f : P(V )-----> P(V )∗ asociada a
una forma bilineal B : V × V → k está definida como
f ([v]) = {[u] ∈ P(V ) | B(u, v) = 0}.
Además, dos formas bilineales B, B definen la misma correlación si y sólo si los homomorfismos FB y FB definen la misma aplicación proyectiva. Por la Proposición 7.6(v),
esto es equivalente a que FB y FB sean proporcionales, lo que equivale a que B y B sean
proporcionales.
Proposición 9.5. Sea f : P(V )-----> P(V )∗ la correlación asociada a una forma bilineal
no nula B : V × V → k. Consideramos la forma bilineal B t : V × V → k definida
por B t (u, v) = B(v, u). Entonces la aplicación dual de f (ver Proposición 7.16) es la
aplicación f ∗ : P(V )-----> P(V )∗ asociada a B t , es decir, para todo p ∈ P(V ) se tiene que
f ∗ (p) = {q ∈ P(V ) | p ∈ f (q)}.
Demostración: Identificamos cada punto [v] ∈ P(V ) con el hiperplano Ω([v]) de P(V )∗
consistente en el conjunto de hiperplanos de P(V ) que pasan por p. Entonces, por definición
de aplicación dual, f ∗ manda [v] a la imagen inversa por f de Ω([v]), es decir al conjunto
{[u] ∈ P(V ) | [v] ∈ f ([u])}. Como f está asociada a B, se tendrá [v] ∈ f ([u]) si y sólo si
B(v, u) = 0, es decir B t (u, v) = 0, por lo que f ∗ es la correlación asociada a B t .
Definición. Llamaremos correlación dual o correlación transpuesta de una correlación f
a la aplicación f ∗ : P(V )-----> P(V )∗ del lema anterior. Nótese que, si f tiene matriz A
respecto de una referencia y su dual, entonces f ∗ tiene matriz At .
Proposición 9.6. Sea f : P(V )-----> P(V )∗ una correlación asociada a una forma bilineal
B : V × V → k. Entonces:
(i) f = f ∗ si y sólo si B es simétrica o antisimétrica.
(ii) Cada punto p ∈ P(V ) está en el hiperplano f (p) si y sólo si B es antisimétrica.
Demostración: Sabemos por la Proposición 9.5 que f ∗ está asociada a B t . Por tanto, por
la Observación 9.4, se tendrá f = f ∗ si y sólo si existe λ ∈ k \ {0} tal que B = λB t . Para
demostrar (i), basta ver que los únicos valores de λ para los que se puede dar esta igualdad
son 1 y −1. En efecto, transponiendo la igualdad y reiterando, se obtiene B t = λB =
λ(λB t ) = λ2 B t , lo que implica λ2 = 1 y por tanto λ = ±1. Esto demuestra (i).
Para demostrar (ii), la Observación 9.4 nos dice que [v] ∈ f ([v]) si y sólo si B(v, v) = 0.
Por tanto, cada punto estará en su imagen por f si y sólo si B(v, v) = 0 para todo
v ∈ V . Veamos que esta última condición es equivalente a que B sea una forma bilineal
88
antisimétrica. En efecto, si B(v, v) = 0 para todo v ∈ V , en particular se tendrá, para
cualesquiera u, v ∈ V ,
0 = B(u + v, u + v) = B(u, u) + B(u, v) + B(v, u) + B(v, v) = B(u, v) + B(v, u)
(donde hemos usado la bilinealidad de B). Por tanto, B(u, v) = −B(v, u) para cualesquiera
u, v ∈ V , es decir, B es antisimétrica.
Definición. Se llama correlación nula (o correlación antisimétrica) a una correlación f :
P(V )-----> P(V )∗ tal que p ∈ f (p) para cada p ∈ P(V ). Se llama polaridad o correlación
simétrica a una correlación f : P(V )-----> P(V )∗ que coincide con su dual f ∗ y tal que
el conjunto Q de los puntos p ∈ P(V ) para los que p ∈ f (p) no es todo P(V ). Por la
proposición anterior, tales correlaciones son, respectivamente, las correlaciones asociadas
a una forma bilineal antisimétrica y simétrica.
Ejemplo 9.7. Obsérvese que, como en una recta los hiperplanos son puntos, una correlación en una recta no es más que una aplicación proyectiva de la recta en sı́ misma. Si
f : L-----> L fuera una correlación nula en la recta L, entonces f (p) = p para todo p ∈ L,
luego p serı́a la identidad.
Observación 9.8. Nótese que, si el cuerpo k tiene caracterı́stica distinta de dos (lo que
supondremos siempre) no puede haber correlaciones nulas no degeneradas en un espacio
proyectivo de dimensión n par. El motivo es que si A es una matriz antisimétrica de orden
impar n + 1, entonces de la igualdad At = −A se sigue det A = det At = (−1)n+1 det A =
− det A, lo que implica det A = 0 (aquı́ hace falta usar que la caracterı́stica no es dos; en
caso contrario, 2 det A = 0 no implicarı́a det A = 0). En cambio, para n impar, la matriz
0 1
−1 0
0 1
−1 0
..
.
0
−1
1
0
(donde las entradas no explicitadas son cero) es antisimétrica de orden par. En realidad,
puede demostrarse que cualquier correlación nula no degenerada admite una matriz de esa
forma respecto de un sistema de referencia adecuado.
Definición. Por abuso de notación, se suele llamar cuádrica en un espacio proyectivo P(V )
a un conjunto Q de puntos p ∈ f (p), donde f : P(V )-----> P(V )∗ es una polaridad, aunque en
89
realidad una cuádrica es una polaridad, en el sentido de que dos cuádricas se considerarán
iguales sólo si sus polaridades coinciden. Se llamará vértice de la cuádrica al centro de la
polaridad. Llamaremos rango de la cuádrica al rango de cualquier matriz que defina la
polaridad. Diremos que la cuádrica es no degenerada o no singular si el rango es máximo,
es decir, dim(V ) (equivalentemente, f es una proyectividad o, también, el lugar singular
es vacı́o).
Lema 9.9. Sea f : P(V )-----> P(V )∗ la polaridad asociada a una forma bilineal (simétrica)
B : V × V → k y sea Q ⊂ P(V ) el conjunto de puntos p ∈ P(V ) tales que p ∈ f (p).
Dado un subespacio P(W ) ⊂ P(V ) no contenido en Q, entonces la aplicación f|P(W ) :
P(W )-----> P(W )∗ definida por f|P(W ) (p) = f (p) ∩ P(W ) es la polaridad asociada a la restricción BW ×W . Además, como conjunto de puntos, esta cuádrica es la intersección de Q
con P(W ).
Demostración: Por definición, la correlación asociada a BW ×W asocia a cada [w] ∈ P(W )
el conjunto de puntos [u] ∈ P(W ) tales que BW ×W (u, w) = 0, que es precisamente f ([w]) ∩
P(W ). Además, [w] ∈ P(W ) está en el correspondiente conjunto de puntos si y sólo si
BW ×W (w, w) = 0, es decir, si y sólo si [w] ∈ Q.
Ejemplo 9.10. En coordenadas respecto de una referencia R (y su dual), la polaridad
de una cuádrica viene dada por una matriz simétrica A. Si el rango de A es r, entonces
sabemos que existe una matriz P de determinante no nulo tal que
P t AP =
λ0
..
.
λr−1
0
..
.
0
con λo , . . . , λr−1 ∈ k \ {0} Esto quiere decir que, haciendo el cambio de coordenadas
X0
X0
.
.. = P ..
. ,
Xn
Xn
= 0. Por tanto:
la ecuación de la cuádrica queda λ0 X0 + . . . + λr−1 Xr−1
2
2
–Si la cuádrica tiene rango uno, su conjunto de puntos es un hiperplano, y se dice que
la cuádrica es un hiperplano doble.
90
–Si la cuádrica tiene rango dos, su conjunto de puntos es de la forma X0 + λλ10 X1 = 0.
λ1
Si − λ0 ∈ k, entonces dicho conjunto es la unión de los hiperplanos X0 + − λλ10 X1 = 0 y
X0 − − λλ10 X1 = 0, y se dice que la cuádrica es un par de hiperplanos reales (los hiperplanos
son distintos, pues λ1 = 0). Si, en cambio − λλ10 ∈ k, se dice que la cuádrica es un par de
hiperplanos imaginarios.
2
2
El resultado siguiente indica que la polaridad respecto de una cuádrica no degenerada
tiene el mismo sentido que vimos para cónicas (Proposición 4.2), aunque ahora lo haremos
sin coordenadas:
Proposición 9.11. Sea f : P(V )-----> P(V )∗ la polaridad de una cuádrica Q. Entonces,
para cualquier p ∈ Q se tiene:
(i) Una recta de f (p) que pase por p o bien está contenida en Q o corta a Q sólo en el
punto p.
(ii) Una recta que pase por p y no esté contenida en f (p) corta a Q exactamente en dos
puntos (siendo p uno de ellos).
Demostración: Sea L ⊂ f (p) tal que p ∈ L y supongamos que L contiene un punto q ∈ Q
distinto de L. Veamos entonces que L ⊂ Q, lo que demostrará (i). Observamos en primer
lugar que, como q ∈ f (p), entonces p ∈ f (q), y como q ∈ Q, entonces q ∈ f (q). Por tanto,
L ⊂ f (q), además de L ⊂ f (p) por hipótesis. Dado pues q ∈ L, se tendrá q ∈ f (p) y
q ∈ f (q), luego p, q ∈ f (q ), es decir, L ⊂ f (q ). En particular, q ∈ f (q ), es decir, q ∈ Q
como querı́amos.
Para demostrar (ii), sea ahora L una recta que pasa por p pero no está contenida en
f (p). En particular, f (p) es un hiperplano que corta a L sólo en el punto p. Consideramos
f|L : L-----> L definido en el Lema 9.9. Evidentemente, f|L (p) = f (p) ∩ L = p. Además, si
q ∈ L \ {p}, no puede ser L ⊂ f (q), ya que entonces p ∈ f (q), lo que implicarı́a q ∈ f (p),
es decir, q ∈ f (p)capL = p, que es absurdo. Por tanto, f|L (q) = f (q) ∩ L es un punto, lo
que implica que f|L es no degenerada, es decir, tiene rango dos. Por el Ejemplo 9.10, como
Q ∩ L tiene al menos el punto real p, consiste exactamente en dos puntos.
Definición. Dada una cuádrica no degenerada Q ⊂ P(V ), se llama hiperplano polar de un
punto respecto de la cuádrica a la imagen del punto respecto de la correlación f determinada
por la cuádrica (en el sentido del resultado anterior) Si p ∈ Q, llamaremos a f (p) hiperplano
tangente a la cuádrica Q en el punto p y lo denotaremos Tp Q. Más en general, se llama
subespacio polar de un subespacio Λ ⊂ P(V ) al subespacio que corresponde por dualidad
a f (Λ) ⊂ P(V )∗ . Se tiene entonces que la intersección de Q con el hiperplano polar de un
punto p es el conjunto de puntos q tales que el hiperplano tangente a Q en q pasa por p.
91
Proposición 9.12. Sea Q una cuádrica de rango r y vértice Λ0 en un espacio proyectivo
P(V ) de dimensión n. Entonces:
(i) Para cada p ∈ Q, la intersección de Q con el hiperplano tangente a Q en p es una
cuádrica en dicho hiperplano, que tiene rango r − 2 y vértice el subespacio generado
por p y Λ0 .
(ii) Los subespacios lineales contenidos en Q tienen dimensión a lo sumo
2n−r
2 .
Demostración: Para demostrar (i), tomamos coordenadas en P(V ) tales que el punto p
sea (1 : 0 : . . . : 0) y el hiperplano tangente a Q en p sea H : Xn = 0. La matriz de Q en
estas coordenadas tendrá entonces la forma
0
0
...
0
p
0n
A=
0
..
.
p11
..
.
...
p1,n−1
..
.
p1n
..
.
0
p0n
p1,n−1
p1n
...
...
pn−1,n−1
pn−1,n
pn−1,n
pn,n
...
p1,n−1
p11
..
con p0n = 0. Además, como el rango de A es r, el rango de ...
.
p1,n−1 . . . pn−1,n−1
es r − 2. Es claro que H ∩ Q es la cuádrica en H, cuya ecuación en las coordenadas
x0 , . . . , xn−1 consiste en hacer Xn = 0 en la ecuación de Q, es decir, es la cuádrica de
matriz
0
0
...
0
...
p1,n−1
p11
0
.
..
..
.
.
.
.
0
p1,n−1
...
pn−1,n−1
que claramente tiene rango r − 2 y cuyo núcleo es el subespacio que corresponde al subespacio proyectivo generado por p y Λ0 .
Sea ahora Λ un subespacio lineal contenido en Q de dimensión m. La restricción de la
polaridad de Q a Λ es una aplicación proyectiva Λ-----> Ω(Λ) con centro Λ ∩ Λ0 . Por tanto
n − m − 1 = dim(Ω(Λ)) ≥ dim Λ − dim(Λ ∩ Λ0 ) − 1 ≥ dim Λ − dim Λ0 − 1 = m − (n − r) − 1
de donde se obtiene (ii).
Proposición 9.13. Sea P(V ) un espacio proyectivo de dimensión tres y sea Q ⊂ P(V )
una cuádrica no degenerada que contiene una recta L. Entonces por cada punto p ∈ Q
pasan exactamente dos rectas contenidas en Q.
Demostración: Por la Proposición 9.12(i) sabemos que la intersección de Q con el plano
tangente a Q en p es una cónica de rango uno, es decir, un par de rectas. El resultado
92
estará demostrado si demostramos que las rectas no son imaginarias. Distinguimos dos
casos:
–Si p ∈ L, la intersección de Q con su plano tangente en P contiene a la recta L, luego
el par de rectas no son imaginarias (ya que L es una de ellas).
–Si p ∈ L, entonces, la intersección de Q con el plano Π generado por p y L es una
cónica que pasa por p y contiene a la recta L. Por tanto, dicha cónica es un par de rectas
no imaginarias, una de ellas L, y otra recta L que pasa por p. Repitiendo el caso anterior
tomando L en lugar de L, se obtiene el resultado.
93
10. Espacio afı́n y espacio proyectivo
94