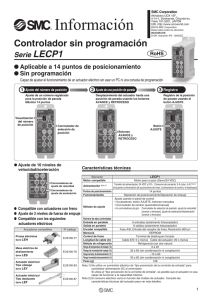
¿Problemas para programar su actuador eléctrico? ¿Problemas
Anuncio

Soluciones SMC – Actuadores eléctricos ¿Problemas para programar su actuador eléctrico? Actuadores eléctricos fáciles de manejar – para un control de velocidad, fuerza y posición Actuadores eléctricos Velocidad, fuerza y control de posicionamiento VELOCIDAD, FUERZA y CONTROL DE POSICIONAMIENTO VELOCIDAD - la rapidez (normalmente elevada) con la que suceden las cosas FUERZA - la influencia que provoca un cambio en una cantidad física (fuerza = masa x aceleración) CONTROL DE POSICIONAMIENTO - un tipo de sistema de control diseñado para mover objetos o máquinas hasta una posición conocida o hasta múltiples posiciones (a menudo ligado al nombre “precisión”) Tres características de rendimiento que suelen utilizarse cuando se describen los beneficios de la actuación eléctrica. Actuador: en general, un dispositivo mecánico que coge la energía, normalmente transportada por el aire, la corriente eléctrica o un líquido, y la convierte en cierta clase de movimiento. (Fuente de información: Wikipedia) Así pues, ¿son mejores los actuadores eléctricos que las opciones neumáticas? La respuesta es sencilla – ¡depende totalmente de la aplicación! A la hora de elegir entre actuadores neumáticos o eléctricos para sus necesidades de control de automatización, la aplicación y el lugar específico en el que ésta se llevará a cabo son los que, en última instancia, le ayudarán a determinar su elección. Ambas tecnologías poseen ventajas y desventajas. En resumen Actuadores neumáticos: • son relativamente económicos • ofrecen una mayor vida útil (en términos de ciclos) • son excelentes para aplicaciones de movimiento continuo de extremo a extremo • ofrecen elevada velocidad y elevada fuerza • son relativamente fáciles de utilizar y mantener • no requieren una complicada programación Actuadores eléctricos: • ofrecen mayores niveles de precisión y repetitividad • son más limpios, suaves y silenciosos • proporcionan un verdadero control del movimiento: movimiento multi-posición, sincronizado y control de velocidad y fuerza • no requieren aire comprimido para funcionar Nuestro completo catálogo de productos, que actualmente contiene más de 11.000 productos básicos, ha sido específicamente desarrollado para la automatización de las fábricas y para satisfacer las necesidades de la industria de procesamiento. Como líderes mundiales, hemos desarrollado una completa gama de actuadores neumáticos y eléctricos para las aplicaciones más exigentes. Además, nuestros expertos estarán siempre a su disposición para proporcionarle guía y consejo experimentado. 2 Pinzas eléctricas LEHZ•LEHF•LEHS Nuevos actuadores eléctricos “sencillos” de SMC Nuevos actuadores eléctricos “sencillos” de SMC: Recientemente hemos comercializado cuatro productos de actuación eléctrica que se unen a nuestras gamas de actuadores eléctricos y electroneumáticos ya existentes, nuestras series LE+. Mesa eléctrica lineal LES • Serie LEY: un actuador eléctrico con vástago • Serie LEF: un actuador eléctrico sin vástago • Serie LES: un actuador eléctrico con mesa lineal • Serie LEH: una gama de pinzas eléctricas ¿Por qué se refieren a ellos como eléctricos “sencillos”? Al contrario que los productos similares, esta gama de actuadores eléctricos son extremadamente sencillos de programar. Con sólo seleccionar la opción de ajuste “Modo sencillo”, su actuador eléctrico funcionará de forma eficaz y eficiente a los pocos minutos de abrir la caja de embalaje. Actuador eléctrico con vástago LEY De forma no oficial, a esto lo denominamos nuestra “aproximación de programación simplificada” a la actuación eléctrica, una aproximación que nos ayudará definitivamente a disipar parte del misterio que rodea esta actividad. Velocidad, fuerza y control de posicionamiento Actuador eléctrico / Tipo deslizante LEF sufre: • una insuficiente detección de las piezas de trabajo • una constante rotura de las piezas de trabajo • una elevada tasa de rechazos debido a marcas en las piezas de trabajo • continuas roturas de los dedos de las pinzas • mayores tiempos de inactividad debido a un mantenimiento constante o al ajuste correctivo de los componentes Controlador LEC experimenta: • dificultades para controlar la velocidad y la aceleración del actuador • un impacto excesivamente brusco al final de la carrera de un actuador neumático • el excesivo peso de las pinzas neumáticas, mayor de lo que usted desearía • la necesidad de utilizar múltiples tipos y tamaños de actuadores neumáticos en sus aplicaciones • complicaciones cuando emplea múltiples detectores magnéticos en sus aplicaciones • problemas de espacio para acomodar conductos de aire a presión en sus aplicaciones Conceptos de programación actualmente: • requiere un gran inventario de componentes en existencias para sus aplicaciones • sufre el elevado ruido de las máquinas debido al continuo movimiento del aire comprimido Si estos problemas le resultan familiares, nuestra más reciente gama de actuadores eléctricos le puede ofrecer ahora la solución ideal. Una suave aceleración y deceleración, una fuerza de amarre controlada y un posicionamiento múltiple, preciso y fiable son sólo algunos de los beneficios claves de rendimiento que encontrará al elegir un actuador eléctrico de SMC para sus aplicaciones. Más silenciosos que los actuadores neumáticos y con un funcionamiento más limpio, nuestra completa gama LE de actuadores eléctricos ofrece un excelente rendimiento, una increíble fiabilidad y una inigualable precisión y exactitud. Y, gracias a nuestro ajuste “Modo sencillo”, ya no tendrá usted que ser un genio para programar y experimentar los beneficios operativos de nuestra gama de productos LE, con una velocidad, fuerza y control de posicionamiento totales. 3 Una nueva generación de actuadores eléctricos para satisfacer todas sus necesidades de aplicación La nueva gama de actuadores eléctricos de la serie LE añade simplicidad de uso a los beneficios convencionales de los actuadores eléctricos. Fuerza, velocidad y posicionamiento regulables (64 puntos) para adaptarse a cualquier posible aplicación. La nueva serie LEC de controladores se entrega con los parámetros del actuador ya configurados, reduciendo así el tiempo y la complejidad de la configuración inicial. Serie LEHZ Serie LEHF Serie LEHS Serie LES Serie LEY Serie LEF La optimizada combinación de tamaño compacto y características mecánicas hacen que estos actuadores resulten ideales para un amplio rango de aplicaciones. Las funciones incorporadas, como la prevención de caídas o la verificación del amarre, aportan la máxima seguridad. Coste Funciones de ahorro energético: Pinzas: función de autobloqueo Actuadores: reducido consumo de potencia Actuadores eléctricos convencionales Actuadores LE Neumática Simplicidad de uso Ejemplos de aplicación Amarre de piezas fácilmente deformables o frágiles Manipulación 4 Transporte suave Control de oscilación Identificación de piezas de trabajo con diferentes dimensiones Transporte sin golpes / Alimentación precisa Montaje por presión PLC (Debe ser dispuesto por el cliente) Serie LEHS Fuente de alimentación DC (Debe ser dispuesta por el cliente) Serie LEHF Opciones (pedido por separado) � Software de configuración por PC (CD-ROM) Serie LES Controlador Serie LEC Serie LEF � PC Cable del actuador � (con cable 3 m) (Cable flexible) Ref. LEC.T1.3JG(S) Ref. LE-CP-1 (1.5 m) -3 (3 m) -5 (5 m) � Modo sencillo: Los controladores son enviados con los parámetros ya instalados así que únicamente es necesario programar la posición y velocidad (también es posible el ajuste de la fuerza de empuje). � Hasta 64 posiciones seleccionables. � Capaz de controlar motores paso a paso con encoder y servomotores. Modelo Motor controlado Consola de programación Actuador eléctrico / Tipo deslizante LEF Serie LEY Especificaciones del controlador Actuador eléctrico con vástago LEY (Con cable de comunicación con el PC de 3 m) Ref. LEC-W1 JG: sin selector de habilitación JGS: con selector de habilitación LECP6 LECA6 Motor paso a paso con encoder Servomotor 24 VDC ±10% 24 VDC ±10% 3 A (picos de 10 A) Especificaciones de la 3 A( fuente de alimentación controlada, ( fuente de alimentación controlada, fuente de alimentación fuente de alimentación dinámica incluída) fuente de alimentación dinámica incluída) Entradas digitales Salidas digitales 11 entradas (optoacopladas) 11 entradas (optoacopladas) 13 salidas (optoacopladas) 13 salidas (optoacopladas) Encoder controlado Canales A/B, 800 pulsos por revolución Canales A/B/Z. 800 pulsos por revolución Comunicación serie RS485 (protocolo Modbus) Conceptos de programación El controlador se puede programar fácilmente usando el software de configuración del controlador o una consola de programación específica. Controlador LEC Serie LEHZ Cable E/S Ref. LEC-CN5-1 (1.5 m) -3 (3 m) -5 (5 m) Mesa eléctrica lineal LES � Pinzas eléctricas LEHZ•LEHF•LEHS Configuración del sistema Ajustes detallados � Los datos de paso se pueden ajustar en detalle. � Posibilidad de monitorizar el estado del terminal y las señales. � Posibilidad de ajustar los parámetros. � Posibilidad de realizar un movimiento con control manual y velocidad constante, retorno al origen, operación y prueba y comprobación de la salida obligatoria. 5 Pinza Eléctrica Serie LEHZ•LEHF•LEHS � Compactas y ligeras Diversas fuerzas de amarre carrera, permite agarrar varios tipos de piezas de trabajo. Compacta 165 g Peso: 135 g Carrera: Max. 40 mm Carrera larga Carrera: Max. 80 mm 30 30 mm 87 10 4 m m m m Peso: � Larga mm Serie LEHF Serie LEHZ Tornillo de ajuste del accionamiento manual Tornillo de ajuste del accionamiento manual / Ambos lados Husillo trapecial Reducida resistencia a la fricción gracias a un tratamiento especial Para abrir y cerrar los dedos (cuando la alimentación está desactivada) Para abrir y cerrar los dedos (cuando la alimentación está desactivada) Husillo trapecial Reducida resistencia a la fricción gracias a un tratamiento especial Guía lineal Prevención del defecto de alineación de la guía lineal El defecto de alineación de la guía lineal se evita con 2 pasadores de posicionamiento. Prevención del defecto de alineación de la guía lineal Guía lineal El defecto de alineación de la guía lineal se evita con 2 pasadores de posicionamiento. Ejemplos de pedido Serie 6 Modelo Carrera de Fuerza de Velocidad de apertura y cierre / apertura y cierre Tipo de amarre Ambos lados controlador [mm/s] [N] [mm] LEHZ10K2-4-R16P1 4 6 a 14 5 a 80 LEHZ16K2-6-R16P1 6 6 a 14 5 a 80 LEHZ20K2-10-R16P1 10 16 a 40 5 a 100 LEHZ25K2-14-R16P1 14 16 a 40 5 a 100 LEHZ32K2-22-R16P1 22 52 a 130 5 a 120 LEHZ40K2-30-R16P1 30 84 a 210 5 a 120 Longitud cable del actuador [m] Peso [g] 165 220 Con controlador (PNP) 1,5 430 585 1120 1760 � Aplicable a piezas de trabajo esféricas Peso: Se puede seleccionar la dirección de montaje del cable del motor. Compacta 185 g Peso: 150 g (LEHS10L) Serie LEHZ Entrada en el lado izquierdo m (LEHS10) 5m 5m m Cable del motor Cubierta del conector m 29. 75 .6 m m .1 92 29. Pinzas eléctricas LEHZ•LEHF•LEHS Pinzas eléctricas m Serie LEHS Entrada en el lado delantero Serie LEHF Tornillo de ajuste del accionamiento manual Para abrir y cerrar los dedos (cuando la alimentación está desactivada) Entrada en el lado izq. Entrada en el lado derecho Cable del motor Serie LEHS Entrada en el lado izq. Husillo trapecial Entrada en el lado derecho Reducida resistencia a la fricción gracias a un tratamiento especial Se emplea una estructura de cuña deslizante Se puede obtener un tamaño compacto y una gran fuerza de amarre gracias a su mecanismo de guiado por cuña deslizante. Serie Modelo Entrada en el lado delantero apertura y cierre / Ambos lados [mm] Fuerza de Velocidad de apertura y cierre Tipo de amarre controlador [mm/s] [N] Longitud cable del actuador [m] Peso [g] LEHF10K2-16-R16P1 16 3a7 5 a 80 340 LEHF20K2-24-R16P1 24 11 a 28 5 a 100 610 LEHF32K2-32-R16P1 32 48 a 120 5 a 100 LEHF40K2-40-R16P1 40 72 a 180 5 a 100 LEHS10K3-4-R16P1 4 2,2 a 5,5 5 a 70 LEHS20K3-6-R16P1 6 9 a 22 5 a 80 LEHS32K3-8-R16P1 8 36 a 90 5 a 100 975 LEHS40K3-12-R16P1 12 52 a 130 5 a 120 1265 1625 Con controlador (PNP) 1,5 1980 185 410 7 Pinza Eléctrica de 2 Dedos Compacta y ligera – Serie LEHZ LEHZ10 LEHZ16 LEHZ20 LEHZ25 LEHZ32 LEHZ40 Modelo Carrera / ambos lados (mm) Características técnicas del actuador Fuerza de amarre (N) Nota 1) 4 Básico Compacto Velocidad de apertura y cierre /Velocidad de empuje (mm/s) Nota 2) 10 2a6 14 16 a 40 11 a 28 3a8 5 a 80/5 a 50 22 30 52 a 130 84 a 210 — 5 a 100/5 a 50 — 5 a 120/5 a 50 Método de accionamiento Husillo trapecial + Leva deslizante Tipo de guiado de los dedos Guía lineal (no circulante) Repetibilidad (mm) Nota 3) Precisión en la determinación repetida de la longitud (mm) Nota 4) Efecto de contragolpe de los dedos / ambos lados (mm) Nota 5) Resistencia a impactos / Resistencia a vibraciones (m/s2) Nota 6) ±0.02 ±0.05 0.5 o menos 1.0 o menos 150/30 Frecuencia máx. de trabajo (C.P.M) 60 Rango de temperatura de trabajo (°C) 5 a 40 (sin congelación ni condensación) Rango de humedad de trabajo (%) 35 a 85 (sin congelación ni condensación) Peso (g) Básico 165 220 430 585 1120 Compacto 135 190 365 520 — Dimensiones del motor Características eléctricas 6 6 a 14 �20 Tipo de motor �28 1760 — �42 Motor paso a paso (Servo/24 VDC) Encoder Fase A/B incremental (800 pulsos/giro) 24 VDC ±10% Tensión nominal (V) Consumo de energía/ Consumo de energía en reposo durante el funcionamiento (W) Nota 7) Básico 11/7 28/15 34/13 Compacto 8/7 22/12 — — Consumo de energía máx. momentánea (W) Nota 8) Básico 19 51 57 61 Compacto 14 42 — — Peso del controlador (g) 36/13 150 (Montaje con tornillo) Nota 1) La fuerza de amarre debe ser de 10 a 20 veces el peso del objeto a transportar. La fuerza de posicionamiento debe ser del 150% cuando se libera la pieza de trabajo. La precisión de la fuerza de amarre debe ser: ±30% (fondo de escala) para LEHZ10/16 ±25% (fondo de escala) para LEHZ20/25 ±20% (fondo de escala) para LEHZ32/40 Nota 2) La velocidad de empuje debe fijarse dentro del rango durante la operación de empuje (amarre). En caso contrario, podría ocasionar un funcionamiento defectuoso. Nota 3) La repetibilidad es la variación en la posición de amarre (posición de la pieza de trabajo) cuando la operación de amarre se lleva a cabo de forma repetida siguiendo la misma secuencia para la pieza de trabajo. Nota 4) La precisión en la determinación repetida de la longitud es la dispersión (valor del monitor del controlador) cuando la pieza de trabajo se sujeta de forma repetida en la misma posición. Nota 5) La operación de empuje (amarre) no se verá afectada por el efecto de contragolpe. Realice una carrera más larga para compensar el efecto de contragolpe generado durante la apertura. Nota 6) Resistencia a impactos: La pinza supera la prueba de impacto tanto en dirección paralela como perpendicular al husillo. (La prueba se llevó a cabo con la pinza en el estado inicial). Resistencia a vibraciones: Supera la prueba en un rango de frecuencias entre 45 y 2000 Hz. La prueba se realizó tanto en dirección paralela como perpendicular al husillo. (La prueba se llevó a cabo con la pinza en el estado inicial). Nota 7) El consumo de energía (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. El consumo de energía en reposo durante el funcionamiento corresponde al momento en el que el actuador está detenido en la posición de ajuste, incluyendo cuando se encuentra en el modo de ahorro energético durante el amarre. Nota 8) El consumo máximo de energía momentánea (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Dicho valor puede utilizarse para la selección del suministro eléctrico. Montaje a) Cuando se usa la rosca del lateral del cuerpo b) Cuando se usa la rosca de la placa de montaje c) Cuando se usa la rosca de la parte posterior del cuerpo Pasador de posicionamiento Dirección de montaje Dirección de montaje Dirección de montaje Pasador de posicionamiento 8 Pasador de posicionamiento Pinza Eléctrica de 2 Dedos Larga carrera – Serie LEHF LEHF10 LEHF20 LEHF32 LEHF40 Básico 16 24 32 40 Carrera larga 32 48 64 80 3a7 11 a 28 48 a 120 72 a 180 Modelo Carrera / ambos lados (mm) Fuerza de amarre (N) Velocidad de apertura y cierre/ Velocidad de empuje (mm/s) Nota 2) Características técnicas del actuador Nota 1) Características eléctricas 5 a 100/5 a 30 5 a 80/5 a 20 Método de accionamiento Husillo trapecial + Correa Tipo de guiado de los dedos Guía lineal (no circulante) ±0.05 Repetibilidad (mm) Nota 3) Precisión en la determinación repetida de la longitud (mm) Nota 4) ±0.05 1.0 o menos Efecto de contragolpe de los dedos / ambos lados (mm) Nota 5) Resistencia a impactos/ vibraciones (m/s2) Nota 6) Frecuencia máx. de trabajo (C.P.M) 150/30 60 Rango de temperatura de trabajo (°C) 5 a 40 (sin congelación ni condensación) Rango de humedad de trabajo (%) 35 a 85 (sin congelación ni condensación) Peso (g) Básico 340 610 1625 Carrera larga 370 750 1970 �20 �28 Dimensiones del motor Tipo de motor Pinzas eléctricas LEHZ•LEHF•LEHS Pinzas eléctricas 1980 2500 �42 Motor paso a paso (Servo/24 VDC) Encoder Fase A/B incremental (800 pulsos/giro) Tensión nominal (V) Consumo de energía/Consumo de energía en reposo durante el funcionamiento (W) Nota 7) Consumo de energía máx. momentánea (W) Nota 8) 24 VDC ±10% 11/7 19 Peso del controlador (g) 28/15 34/13 36/13 51 57 61 150 (Montaje con tornillo) Nota 1) La fuerza de amarre debe ser de 10 a 20 veces el peso del objeto a transportar. La fuerza de posicionamiento debe ser del 150% cuando se libera la pieza de trabajo. La precisión de la fuerza de amarre debe ser: ±30% (fondo de escala) para LEHF10 ±25% (fondo de escala) para LEHF20 ±20% (fondo de escala) para LEHF32/40 Nota 2) La velocidad de empuje debe fijarse dentro del rango durante la operación de empuje (amarre). En caso contrario, podría ocasionar un funcionamiento defectuoso. Nota 3) La repetibilidad es la variación en la posición de amarre (posición de la pieza de trabajo) cuando la operación de amarre se lleva a cabo de forma repetida siguiendo la misma secuencia para la pieza de trabajo. Nota 4) La precisión en la determinación repetida de la longitud es la dispersión (valor del monitor del controlador) cuando la pieza de trabajo se sujeta de forma repetida en la misma posición. Nota 5) La operación de empuje (amarre) no se verá afectada por el efecto de contragolpe. Realice una carrera más larga para compensar el efecto de contragolpe generado durante la apertura. Nota 6) Resistencia a impactos. La pinza supera la prueba de impacto tanto en dirección paralela como perpendicular al husillo. (La prueba se llevó a cabo con la pinza en el estado inicial). Resistencia a vibraciones: Supera la prueba en un rango de frecuencias entre 45 y 2000 Hz. La prueba se realizó tanto en dirección paralela como perpendicular al husillo. (La prueba se llevó a cabo con la pinza en el estado inicial). Nota 7) El consumo de energía (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. El consumo de energía en reposo durante el funcionamiento corresponde al momento en el que el actuador está detenido en la posición de ajuste, incluyendo cuando se encuentra en el modo de ahorro energético durante el amarre. Nota 8) El consumo máximo de energía momentánea (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Dicho valor puede utilizarse para la selección del suministro eléctrico. Montaje a) Cuando se usa la rosca del cuerpo b) Cuando se usa la rosca de la placa de montaje c) Cuando se usa la rosca de la parte posterior del cuerpo Dirección de montaje Pasador de posicionamiento Pasador de posicionamiento Dirección de montaje Pasador de posicionamiento Dirección de montaje 9 Características técnicas del actuador Pinza Eléctrica de 3 Dedos Serie LEHS Modelo LEHS10 LEHS20 LEHS32 Carrera / diámetro (mm) 4 6 8 12 2.2 a 5.5 9 a 22 36 a 90 52 a 130 Fuerza de amarre (N) Nota 1) Básico Compacto Velocidad de apertura y cierre/ Velocidad de empuje (mm/s) Nota 2) Método de accionamiento 7 a 17 — — 5 a 80/ 5 a 100/ 5 a 120/ 5 a 50 5 a 50 5 a 50 Husillo trapecial + cuña deslizante ±0.02 Repetibilidad (mm) Nota 3) Precisión en la determinación repetida de la longitud (mm) Nota 4) ±0.05 0.5 o menos Efecto de contragolpe de los dedos / diámetro (mm) Nota 5) Resistencia a impactos/ vibraciones (m/s2) Nota 6) 150/30 Frecuencia máx. de trabajo (C.P.M) 60 Rango de temperatura de trabajo (°C) 5 a 40 (sin congelación ni condensación) 35 a 85 (sin congelación ni condensación) Rango de humedad de trabajo (%) Peso (g) Básico 185 410 975 Compacto 150 345 — 20 28 Dimensiones del motor Características eléctricas 1.4 a 3.5 5 a 70/ 5 a 50 Tipo de motor Encoder Consumo de energía máx. momentánea (W) Nota 8) — 42 Fase A/B incremental (800 pulsos/giro) 24 VDC ±10% Tensión nominal (V) Consumo de energía/ Consumo de energía en reposo durante el funcionamiento (W) Nota 7) 1265 Motor paso a paso (Servo/24 VDC) Básico 11/7 28/15 34/13 Compacto 8/7 22/12 — — Básico 19 51 57 61 Compacto 14 42 — — Peso del controlador (g) 36/13 150 (Montaje con tornillo) Nota 1) La fuerza de amarre debe ser de 7 a 13 veces el peso del objeto a transportar. La fuerza de posicionamiento debe ser del 150% cuando se libera la pieza de trabajo. La precisión de la fuerza de amarre debe ser: ±30% (fondo de escala) para LEHS10 ±25% (fondo de escala) para LEHS20 ±20% (fondo de escala) para LEHS32/40 Nota 2) La velocidad de empuje debe fijarse dentro del rango durante la operación de empuje (amarre). En caso contrario, podría ocasionar un funcionamiento defectuoso. Nota 3) La repetibilidad es la variación en la posición de amarre (posición de la pieza de trabajo) cuando la operación de amarre se lleva a cabo de forma repetida siguiendo la misma secuencia para la pieza de trabajo. Nota 4) La precisión en la determinación repetida de la longitud es la dispersión (valor del monitor del controlador) cuando la pieza de trabajo se sujeta de forma repetida en la misma posición. Nota 5) La operación de empuje (amarre) no se verá afectada por el efecto de contragolpe. Realice una carrera más larga para compensar el efecto de contragolpe generado durante la apertura. Nota 6) Resistencia a impactos: La pinza supera la prueba de impacto tanto en dirección paralela como perpendicular al husillo. (La prueba se llevó a cabo con la pinza en el estado inicial). Resistencia a vibraciones: Supera la prueba en un rango de frecuencias entre 45 y 2000 Hz. La prueba se realizó tanto en dirección paralela como perpendicular al husillo. (La prueba se llevó a cabo con la pinza en el estado inicial). Nota 7) El consumo de energía (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. El consumo de energía en reposo durante el funcionamiento corresponde al momento en el que el actuador está detenido en la posición de ajuste, incluyendo cuando se encuentra en el modo de ahorro energético durante el amarre. Nota 8) El consumo máximo de energía momentánea (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Dicho valor puede utilizarse para la selección del suministro eléctrico. Montaje a) Montaje tipo A (cuando se usa la rosca de la placa de montaje) b) Montaje tipo B (cuando se usa la rosca de la parte posterior del cuerpo) Dirección de montaje Dirección de montaje Pasador de posicionamiento 10 LEHS40 Pasador de posicionamiento Mesa Eléctrica de Deslizamiento Serie LES Mesa eléctrica lineal Fácil ajuste Los datos se pueden ajustar con sólo 2 elementos: posición y velocidad. Mesa Eléctrica Deslizamiento LES Datos Eje 1 Nº pasos 0 Posic. 50.00 mm Velocidad 400 mm/s ∗ Pantalla de la consola de programación � Compacta, ahorro de espacio (61% de reducción de volumen en comparación con los productos SMC convencionales) � Reducido tiempo de ciclo Máx. aceleración y deceleración: 5000 mm/s /Velocidad máx: 400 mm/s � Repetitividad de posicionamiento: ±0.05 mm � Máxima fuerza de empuje: 180 N � Posibilidad 2 de montaje en 2 direcciones. Montaje con tornillos pasantes Motor integrado Perno de montaje Montaje roscado en el cuerpo 58.5 36 Perno de montaje 124.5 ∗ LESH8 Carrera de 50 mm 11 Mesa Eléctrica de Deslizamiento Serie LES Se pueden seleccionar 2 tipos de motores � Motor paso a paso (Servo/24 VDC) Ideal para el traslado de cargas elevadas a baja velocidad y empuje � Servomotor (24 VDC) Estable a alta velocidad y funcionamiento silencioso Motor paso a paso Carga de la pieza Servomotor Mecanismo de bloqueo de funcionamiento desactivado (opcional) Velocidad Prevención de caídas en caso de corte de suministro eléctrico Variaciones de la serie � Características técnicas del motor paso a paso (Servo/24 VDC) Modelo LESH8RJ-75-R36P3 Carga de la pieza (kg) Carrera (mm) Horizontal Vertical 75 1 Velocidad (mm/s) Paso del tornillo (mm) Con bloqueo (Si / No) 0,25 20 a 400 8 No 4 No 8 Si LESH8RK-75-R36P3 75 2 0,5 10 a 200 LESH8RJ-75B-R36P3 75 1 0,25 20 a 400 LESH8RK-75B-R36P3 75 2 0,5 10 a 200 4 Si LESH16RJ-100-R36P3 100 4 1 20 a 400 10 No LESH16RK-100-R36P3 100 6 2 10 a 200 5 No LESH16RJ-100B-R36P3 100 4 1 20 a 400 10 Si LESH16RK-100B-R36P3 100 6 2 10 a 200 5 Si LESH25RJ-150-R36P3 150 6 2 20 a 400 16 No LESH25RK-150-R36P3 150 9 4 10 a 150 8 No LESH25RJ-150B-R36P3 150 6 2 20 a 400 16 Si LESH25RK-150B-R36P3 150 9 4 10 a 150 8 Si Velocidad (mm/s) Paso del tornillo (mm) Con bloqueo (Si / No) 0,25 20 a 400 8 No Tipo controlador Repetitividad de posicionamiento (mm) Con controlador ± 0.05 (PNP) � Características técnicas del servomotor (24 VDC) Modelo Carga de la pieza (kg) Carrera (mm) Horizontal Vertical LESH8RAJ-75-R36P3 75 1 LESH8RAK-75-R36P3 75 2 0,5 10 a 200 4 No LESH8RAJ-75B-R36P3 75 1 0,25 20 a 400 8 Si LESH8RAK-75B-R36P3 75 2 0,5 10 a 200 4 Si LESH16RAJ-100-R36P3 100 2,5 1 20 a 400 10 No LESH16RAK-100-R36P3 100 5 2 10 a 200 5 No LESH16RAJ-100B-R36P3 100 2,5 1 20 a 400 10 Si LESH16RAK-100B-R36P3 100 5 2 10 a 200 5 Si LESH25RAJ-150-R36P3 150 4 1,5 20 a 400 16 No LESH25RAK-150-R36P3 150 6 2,5 10 a 150 8 No LESH25RAJ-150B-R36P3 150 4 1,5 20 a 400 16 Si LESH25RAK-150B-R36P3 150 6 2,5 10 a 150 8 Si 12 Tipo controlador Repetitividad de posicionamiento (mm) Con controlador (PNP) ± 0.05 Mesa Eléctrica de Deslizamiento Serie LES Mesa eléctrica lineal Modelo Carrera (mm) Horizontal Vertical Fuerza de empuje (N) 30% a 70% Nota 1) Velocidad (mm/s) Velocidad de empuje (mm/s) Nota 2) Repetitividad de posicionamiento (mm) Paso de husillo (mm) Resist. a impactos/vibraciones (m/s2) Nota 3) Tipo de actuación Tipo de guiado Rango de temp. de trabajo (°C) Rango de humedad de trabajo (%) Peso (kg) Características eléctricas Caract. téc. de la unid.de bloqueo Dimensiones del motor Tipo de motor Encoder Tensión nominal (V) Consumo de energía (W) Nota 4) Consumo de energía en reposo durante el func. (W) Nota 5) Consumo de energía máx. momentánea (W) Nota 6) Peso del controlador (kg) Tipo Fuerza de retención (N) Nota 7) Consumo de energía (W) Nota 8) Tensión nominal (V) LESH16R LESH25R LESH8RA LESH16RA LESH25RA 50, 75 50, 100 50, 100, 150 2 1 6 4 9 6 0.5 0.25 2 1 4 2 6 a 15 4 a 10 23.5 a 55 15 a 35 77 a 180 43 a 100 10 a 200 20 a 400 10 a 200 20 a 400 10 a 150 20 a 400 10 a 20 20 10 a 20 20 10 a 20 20 ±0.05 4 8 5 10 8 16 50/20 Husillo trapecial + Correa Guía lineal (tipo circulante) 5 a 40 (sin congelación ni condensación) 35 a 85 (sin congelación ni condensación) carr. 50: 2.50 carr. 50: 0.55 carr. 50: 1.15 carr. 100: 3.30 carr. 75: 0.70 carr. 100: 1.60 carr. 150: 4.26 carr. 50: 3.10 carr. 75: 0.93 carr. 100: 1.90 carr. 100: 3.90 carr. 150: 4.86 �20 �28 �42 Motor paso a paso (Servo/24 VDC) Fase A/B incremental (800 pulsos/giro) 24 VDC ±10% 20 43 67 7 15 13 35 60 74 0.15 (Montaje con tornillo), 0.17 (Montaje en raíl DIN) Modelo de funcionamiento desactivado 24 2.5 300 48 500 77 4 3.6 5 24 VDC ±10% Servomotor (24 VDC) Características técnicas del actuador Modelo Carrera (mm) Características eléctricas Nota 1) El rango de fuerza de empuje del modelo LESH8RA varía entre el 50 y el 75%. La precisión de la fuerza de empuje es del ±20% (fondo de escala). Nota 2) La velocidad de la operación de empuje varía desde la velocidad mínima hasta 20 mm/s. Nota 3) Resistencia a vibraciones: Supera la prueba en un rango de frecuencias entre 45 y 2000 Hz. La prueba se realizó tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con la mesa de deslizamiento en el estado inicial). Resistencia a impactos: Supera la prueba de impacto tanto en dirección paralela como perpendicular al husillo. (La prueba se llevó a cabo con la mesa de deslizamiento en el estado inicial). Nota 4) El consumo de energía (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Nota 5) El consumo de energía en reposo durante el funcionamiento (incluyendo el controlador) corresponde al momento en el que el actuador está detenido en la posición de ajuste, excepto durante la operación de empuje. Nota 6) El consumo máximo de energía momentánea (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Dicho valor puede utilizarse para la selección del suministro eléctrico. Nota 7) Únicamente con bloqueo. Nota 8) Para un actuador con bloqueo, añada el consumo de energía para el bloqueo. Sin bloqueo Con bloqueo Caract. téc. de la unid.de bloqueo Nota 1) Las carreras mostradas entre ( ) y las carreras intermedias se fabrican bajo demanda. Nota 2) La velocidad de a operación de empuje varía desde la velocidad mínima hasta 20 mm/s. Nota 3) Resistencia a vibraciones: Supera la prueba en un rango de frecuencias entre 45 y 2000 Hz. La prueba se realizó tanto en dirección paralela como perpendicular al husillo. (La prueba se llevó a cabo con la mesa de deslizamiento en el estado inicial). Resistencia a impactos: Supera la prueba de impacto tanto en dirección paralela como perpendicular al husillo. (La prueba se llevó a cabo con la mesa de deslizamiento en el estado inicial). Nota 4) El consumo de energía (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Nota 5) El consumo de energía en reposo durante el funcionamiento (incluyendo el controlador) corresponde al momento en el que el actuador está detenido en la posición de ajuste, excepto durante la operación de empuje. Nota 6) El consumo máximo de energía momentánea (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Dicho valor puede utilizarse para la selección del suministro eléctrico. Nota 7) Únicamente con bloqueo. Nota 8) Para un actuador con bloqueo, añada el consumo de energía para el bloqueo. Características técnicas del actuador Carga de la pieza (kg) LESH8R Horizontal Vertical Fuerza de empuje (N) 50% a 100% Nota 1) Velocidad (mm/s) Velocidad de empuje (mm/s) Nota 2) Repetitividad de posicionamiento (mm) Paso de husillo (mm) Resistencia a impactos/vibraciones (m/s2) Nota 3) Tipo de actuación Tipo de guiado Rango de temp. de trabajo (°C) Rango de humedad de trabajo (%) Carga de la pieza (kg) Peso (kg) Dimensiones del motor Potencia del motor (W) Tipo de motor Encoder Tensión nominal (V) Consumo de energía (W) Nota 4) Consumo de energía en reposo durante el func. (W) Nota 5) Consumo de energía máx. momentánea (W) Nota 6) Peso del controlador (kg) Tipo Fuerza de retención (N) Nota 7) Consumo de energía (W) Nota 8) Tensión nominal (V) 50, 75 50, 100 50, 100, 150 2 1 5 2.5 6 4 0.5 0.25 2 1 2.5 1.5 7.5 a 11 5 a 7.5 17.5 a 35 10 a 20 18 a 36 12 a 24 10 a 200 20 a 400 10 a 200 20 a 400 10 a 150 20 a 400 10 a 20 20 10 a 20 20 10 a 20 20 ±0.05 4 8 5 10 8 16 50/20 Husillo trapecial + Correa Guía lineal (tipo circulante) 5 a 40 (sin congelación ni condensación) 35 a 85 (sin congelación ni condensación) carr. 50: 2.50 carr. 50: 0.55 carr. 50: 1.15 carr. 100: 3.30 carr. 75: 0.70 carr. 100: 1.60 carr. 150: 4.26 �20 �28 �42 10 30 36 Servomotor (24 VDC) Fase A/B incremental (800 pulsos/giro)/Fase Z 24 VDC ±10% 58 84 144 4 (Horizontal)/7 (Vertical) 2 (Horizontal)/15 (Vertical) 4 (Horizontal)/43 (Vertical) 84 124 158 0.15 (Montaje con tornillo), 0.17 (Montaje en raíl DIN) Modelo de funcionamiento desactivado 24 2.5 300 48 500 77 4 3.6 5 24 VDC ±10% 13 Mesa Eléctrica Deslizamiento LES Motor paso a paso (Servo/24 VDC) Actuador Eléctrico con Vástago – Serie LEY Fácil ajuste Los datos se pueden ajustar con sólo 2 elementos: posición y velocidad. Datos Eje 1 Nº pasos 0 Posic. 50.00 mm Velocidad 500 mm/s Pantalla de la consola de programación Carrera larga: Máx. 500 mm (LEY32) Variaciones de montaje • Montaje directo: 3 direcciones • Montaje de fijación: 3 tipos Posib. de montar detect. mag. Control de veloc./Posic.: Máx. 64 puntos Permite controlar el posicionamiento y el empuje. Posibilidad de mantener la fuerza del actuador mientras empuja una pieza de trabajo, etc. 3 5 90. 34. ra rre a +C 34 Variaciones de la serie Tamaño∗ 16 25 32 Paso del husillo 10 5 2.5 12 6 3 16 8 4 Fuerza de empuje [N] Velocidad máx. Motor paso Servo[mm/s] a paso motor 38 74 141 122 238 452 189 370 707 30 58 111 35 72 130 — 500 250 125 500 250 125 500 250 125 Carrera [mm] 50 a 300 50 a 400 50 a 500 ∗ El tamaño corresponde al diámetro del cilindro neumático con un empuje equivalente. 14 Actuador Eléctrico con Vástago Serie LEY16, 25, 32 Actuador eléctrico con vástago Forma de pedido LEY 16 50 B R 1 6N 1 Posición de montaje del motor Montaje del controlador Modelo de montaje superior Modelo en paralelo en el lado derecho Modelo en paralelo en el lado izquierdo — R L — D Longitud del cable E/S Tipo de motor — Tamaño Símbolo Tipo — Motor paso a paso (Servo/24 VDC) A Servomotor Nota 1) (24 VDC) — Tipo de controlador Paso Símbolo LEY16 LEY25 LEY32 10 mm 12 mm 16 mm A 5 mm 6 mm 8 mm B 2.5 mm 3 mm 4 mm C ∗ Tabla de carreras Carrera Modelo LEY16 LEY25 LEY32 — 6N 6P Estándar/ 50 50 50 mm 500 500 mm ∗ Bajo demanda ∗ Véase en la tabla inferior para los detalles. Tipo de cable del actuador Opción de motor Nota 2) — C B — R Sin opciones Con cubierta del motor Con bloqueo Nota 3) Sin cable Cable robótico (cable flexible) Montaje — Nota 2) Si se selecciona la especificación [con bloqueo], no se podrá seleccionar [con cubierta de motor]. Nota 3) Si se selecciona el cuerpo 16, no es posible seleccionar carreras U L Taladros roscados en ambos extr. (estándar) Roscado en la parte inferior del cuerpo Escuadra F G D Brida delantera Brida trasera Fijación oscilante hembra ∗ La fijación de montaje se envía de fábrica, pero sin instalar. ∗ Cuando los estilos de montaje son [Brida delantera], [Brida trasera] o [Taladros roscados en ambos extremos] con un extremo fijo y montado en dirección horizontal, úselo dentro de la siguiente carrera. • LEY25: 200 o menos • LEY32: 100 o menos ∗ En caso de [Fijación oscilante hembra], use el actuador dentro del siguiente límite de carrera. • LEY16: 100 o menos • LEY35: 200 o menos • LEY32: 200 o menos ∗ La [Brida trasera] no está disponible para LEY32. Bajo demanda. 100 200 300 400 500 Sin controlador Con controlador (NPN) Con controlador (PNP) Longitud del cable del actuador — Sin cable 8 m∗ 8 1 10 1.5 m m∗ A 3 15 m∗ 3m B 5 20 m∗ 5m C Carrera Nota 1) Productos conformes a CE q La conformidad EMC ha sido comprobada combinando los actuadores eléctricos de la serie LEY con los controladores de la serie LEC. La compatibilidad electromagnética depende de la configuración del panel de control del cliente y de la relación con otros equipos eléctricos y cableados. Por tanto, la conformidad con la directiva EMC no puede certificarse para aquellos componentes SMC que hayan sido incorporados al equipo del cliente bajo condiciones de trabajo reales. En consecuencia, es necesario que el cliente compruebe la conformidad con la directiva EMC de la maquinaria y del equipo como un conjunto. w Para la especificación con servomotor (24 VDC), la conformidad EMC ha sido probada instalando un kit de filtro de ruidos (LECNFA). Véase el kit de filtro de ruidos. Consulte el Manual de Funcionamiento de LECA para la instalación. Sin cable 1.5 m 3m 5m 1 3 5 LEY16 LEY25 LEY32 Precaución Montaje con tornillo Montaje en raíl DIN Actuador Eléctrico con vástago LEY Tamaño 16 25 32 Rosca en extremo del vástago — Rosca hembra en extremo del vástago M Rosca macho en extremo del vástago (se incluye 1 tuerca del extremo del vástago). El actuador y el controlador se venden como un paquete. Compruebe la compatibilidad de la combinación controlador-actuador. <Asegúrese de comprobar lo siguiente antes del uso> q Compruebe que la etiqueta del nº de referencia del actuador coincide con la etiqueta del controlador. w Compruebe que la configuración de E/S en paralelo coincide (NPN o PNP). q w ∗ Consulte el manual de funcionamiento sobre el uso de los productos. Descárgueselo a través de nuestro sitio web http://www.smcworld.com/ 15 Selección del Modelo Serie LEY Gráfica de velocidad–carga de trabajo vertical (Guía) Gráfica de conversión de fuerza (Guía) Motor paso a paso (Servo/24 VDC) LEY16 Motor paso a paso (Servo/24 VDC) LEY16 160 120 6 Paso 5: LEY16B 4 200 300 400 500 600 � Carga de trabajo vertical [kg] � 20 Paso 6: LEY25B 10 Paso 12: LEY25A 5 0 100 200 300 400 500 600 Velocidad [mm/s] Temperatura ambiente: 40°C Fuerza [N] Carga de trabajo vertical [kg] 400 Paso 8: LEY32B 300 400 500 600 Fuerza [N] Carga de trabajo vertical [kg] Carga de trabajo vertical [kg] 0% 20% 40% 60% Paso 10: LEY16AA 2 100 200 300 400 500 Paso 4: LEY32C 600 300 100 Temperatura ambiente: 40°C o menos LEY25 160 Paso 12: LEY25AA � 2 100 200 300 20% 40% 60% 80% 100% 400 Velocidad [mm/s] Temperatura ambiente: 25°C o menos Valor de ajuste de la Factor de trabajo Tiempo de empuje [%] continuo [minutos] fuerza de empuje [%] 85 o menos 100 — Paso 6: LEY25AB 4 0% Máx. 85% 10 6 Paso 3: LEY25AC 140 120 100 80 Paso 6: LEY25AB Paso 12: LEY25AA 60 0% 20% 500 600 40% 60% 80% 100% Temperatura ambiente: 40°C o menos Carga lateral admisible en el extremo del vástago (Guía) 100 LEY32� 10 LEY25� 1 LEY16� 0 100 300 400 500 600 [Carrera] = [Carrera del producto] + [Distancia desde el extremo del vástago hasta el centro de gravedad de la pieza de trabajo] F Pieza de trabajo Temperatura ambiente: 40°C Valor de ajuste de la Factor de trabajo Tiempo de empuje fuerza de empuje [%] [%] continuo [minutos] 65 o menos 100 — 85 50 15 200 Carrera [mm] Valor de ajuste de la fuerza de empuje [%] � 8 Paso 16: LEY32A 400 0 Paso 3: LEY25AC 0 500 200 Velocidad [mm/s] 12 100% 80% Paso 8: LEY32B 600 Paso 5: LEY16AB 80% Valor de ajuste de la Factor de trabajo Tiempo de empuje fuerza de empuje [%] [%] continuo [minutos] 95 o menos 100 — 700 4 60% Valor de ajuste de la Factor de trabajo Tiempo de empuje continuo [minutos] fuerza de empuje [%] [%] 95 o menos 100 — � 800 LEY25 16 200 Temperatura ambiente: 40°C o menos 6 14 � 0 LEY32 Paso 2.5: LEY16AC 40% Valor de ajuste de la fuerza de empuje [%] Máx. 95% Valor de ajuste de la Factor de trabajo Tiempo de empuje [%] continuo [minutos] fuerza de empuje [%] 65 o menos 100 — 10 20% 20 Máx. 65% � Servomotor (24 VDC) LEY16 0% Valor de ajuste de la fuerza de empuje [%] Máx. 95% Valor de ajuste de la fuerza de empuje [%] Velocidad [mm/s] 0 0 Paso 6: LEY25B Paso 12: LEY25A 300 0 200 40 40 100 Paso 16: LEY32A 100 Paso 10: LEY16AA 60 100% Paso 3: LEY25C 10 0 80% 500 30 8 60% Valor de ajuste de la Factor de trabajo Tiempo de empuje [%] continuo [minutos] fuerza de empuje [%] 40 o menos 100 — 50 70 12 70 20 1.3 0.8 85 15 Paso 4: LEY32C 0 40% Temperatura ambiente: 25°C o menos 50 20 20% LEY25 LEY32 40 0% Valor de ajuste de la Factor de trabajo Tiempo de empuje [%] continuo [minutos] fuerza de empuje [%] 85 o menos 100 — 25 15 80 20 Valor de ajuste de la fuerza de empuje [%] Máx. 85% Paso 3: LEY25C 30 0 Fuerza [N] 100 35 0 60 Carga lateral admisible en el extremo del vástago: F [N] 0 LEY25 0 80 20 Velocidad [mm/s] 0 Paso 10: LEY16A Paso 5: LEY16AB 40 Paso 10: LEY16A 2 Paso 5: LEY16B 100 Paso 2.5: LEY16AC 100 Fuerza [N] Paso 2.5: LEY16C 8 120 Paso 2.5: LEY16C 140 Fuerza [N] Carga de trabajo vertical [kg] 10 0 Servomotor (24 VDC) LEY16 Centro de gravedad Actaudor Eléctrico con Vástago Serie LEY Actuador eléctrico con vástago Peso adicional Tamaño (kg) 16 25 32 0.12 0.02 Rosca macho 0.01 Rosca macho en extremo del vástago Tuerca 0.01 Escuadra (2 conjuntos, incluye tornillos de montaje) 0.06 Bloqueo Cubierta motor Brida delantera (incluye tornillos de montaje) Brida trasera (incluye tornillos de montaje) Fijación oscilante hembra (incluye pasador, anil o de retención y tornil os de montaje) 0.19 0.03 0.03 0.02 0.08 0.35 0.04 0.03 0.02 0.14 0.13 0.17 0.20 0.08 0.16 0.22 LEY25 LEY32 50, 100, 200, 300 50, 100, 200, 300, (400) 50, 100, 200, 300, (400, 500) 4 11 20 12 30 30 20 40 40 6 17 30 18 50 50 30 60 60 2 4 8 8 16 30 11 22 43 Fuerza de empuje [N] Nota 3) 4) 14 a 38 27 a 74 51 a 141 63 a 122 126 a 238 232 a 452 80 a 189 156 a 370 296 a 707 15 a 500 8 a 250 4 a 125 18 a 500 9 a 250 5 a 125 24 a 500 12 a 250 6 a 125 Velocidad [mm/s] 50 o menos 35 o menos 30 o menos Velocidad de empuje [mm/s] Nota 5) ±0.02 Repetitividad de posicionamiento [mm] 10 5 2.5 12 6 3 16 8 4 Paso del husillo [mm] 50/20 Resistencia a impactos/vibraciones [m/s2] Nota 6) Husillo a bolas + Correa Tipo de actuación Cojinete deslizante (vástago de émbolo) Tipo de guiado 5 a 40 (sin condensación ni congelación) Rango de temp. de trabajo [°C] 35 a 85 (sin condensación ni congelación) Rango de humedad de trabajo [%] �28 �42 �56.4 Dimensiones del motor Motor paso a paso (Servo / 24 VDC) Tipo de motor Fase A/B incremental (800 pulsos/giro) Encoder 24 VDC ±10% Tensión nominal [V] 23 40 50 Consumo de energía [W] Nota 7) Consumo de energía en reposo 16 15 48 durante el funcionamiento [W] Nota 8) Consumo de energía máx. 43 48 104 momentánea [W] Nota 9) 0.15 (Montaje con tornillo), 0.17 (Montaje en raíl DIN) Peso del controlador [kg] Modelo de funcionamiento desactivado Tipo Nota 10) 20 39 78 78 157 294 108 216 421 Fuerza de retención [N] 3.6 5 5 Consumo de energía [W] Nota 11) 24 VDC ±10% Tensión nominal [V] Características técnicas del actuador Modelo LEY16A LEY25A 50, 100, 200, 300 50, 100, 200, 300, (400) Carrera [mm] Nota 1) 3 6 12 7 15 30 Carga trabj. Horizontal (3000 [mm/s2]) [kg] Nota 2) Vertical (3000 [mm/s2]) 2 4 8 3 6 12 30 a 58 57 a 111 18 a 35 37 a 72 66 a 130 Fuerza de empuje [N] Nota 3) 4) 16 a 30 15 a 500 8 a 250 4 a 125 18 a 500 9 a 250 5 a 125 Velocidad [mm/s] 50 o menos 35 o menos Velocidad de empuje [mm/s] Nota 5) ±0.02 Repetitividad de posicionamiento [mm] 10 5 2.5 12 6 3 Paso del husillo [mm] 50/20 Resistencia a impactos/vibraciones [m/s2] Nota 6) Husillo a bolas + Correa Tipo de actuación Cojinete deslizante (vástago de émbolo) Tipo de guiado 5 a 40 (sin condensación ni congelación) Rango de temp. de trabajo [°C] 35 a 85 (sin condensación ni congelación) Rango de humedad de trabajo [%] �28 �42 Dimensiones del motor 30 36 Potencia Motor [W] Servomotor (24 VDC) Tipo de motor Fase A/B incremental (800 pulsos/giro)/Fase Z Encoder 24 VDC ±10% Tensión nominal [V] 40 86 Consumo de energía [W] Nota 7) Consumo de energía en reposo 4 (Horizontal)/6 (Vertical) 4 (Horizontal)/12 (Vertical) durante el funcionamiento [W] Nota 8) Consumo de energía máx. 59 96 momentánea [W] Nota 9) 0.15 (Montaje con tornillo), 0.17 (Montaje en raíl DIN) Peso del controlador [kg] Modelo de funcionamiento desactivado Tipo Nota 10) 20 39 78 78 157 294 Fuerza de retención [N] 3.6 5 Consumo de energía [W] Nota 11) 24 VDC ±10% Tensión nominal [V] Peso Modelo LEY16 LEY25 LEY32 50 100 200 300 50 100 200 300 400 50 100 200 300 400 500 Motor paso a paso 0.62 0.73 0.98 1.20 1.25 1.42 1.86 2.21 2.56 2.20 2.49 3.17 3.74 4.32 4.89 Peso del producto [kg] Servomotor 0.62 0.73 0.98 1.20 1.21 1.38 1.52 2.17 2.52 — — — — — — Carrera [mm] 17 Actuador Eléctrico con vástago LEY Características técnicas del actuador Características eléctricas Características técnicas de la unidad de bloqueo LEY16 Modelo Carrera [mm] Nota 1) Carga de (3000 [mm/s2]) Horizontal trabajo (2000 [mm/s2]) [kg] Nota 2) Vertical (2000 [mm/s2]) Servomotor (24 VDC) Características eléctricas Nota 1) Las carreras mostradas entre ( ) y las carreras intermedias se fabrican bajo demanda. Nota 2) Horizontal: El valor máximo de la carga de trabajo para la operación de posicionamiento. Para la operación de empuje, la carga de trabajo máxima es igual a la "Carga de trabajo vertical". Para soportar la carga es necesaria una guía externa. La carga de trabajo y la velocidad de traslado reales dependerán del estado de la guía externa. Vertical: La velocidad depende de la carga de trabajo. Compruebe la "Selección del modelo". Las cifras mostradas entre ( ) son los valores máximos de aceleración/deceleración. Ajuste estos valores a 3000 [mm/s2] máx. Nota 3) La precisión de la fuerza de empuje es del ±20% (fondo de escala). Nota 4) El rango de ajuste de la "Fuerza de empuje" varía de 50% a 95% para el modelo LEY16A, de 50% a 95% para el modelo LEY25A. La "Fuerza de empuje" y el "Factor de trabajo" pueden variar en función del valor de ajuste. Compruebe la "Selección del modelo". Nota 5) La velocidad de empuje es la velocidad admisible para la operación de empuje. Nota 6) Resistencia a impactos. Supera la prueba de impacto tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con el actuador en el estado inicial). Resistencia a vibraciones: Supera la prueba en un rango de frecuencias entre 45 y 2000 Hz. La prueba se realizó tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con el actuador en el estado inicial). Nota 7) El consumo de energía (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Nota 8) El consumo de energía en reposo durante el funcionamiento (incluyendo el controlador) corresponde al momento en el que el actuador está detenido en la posición de ajuste, excepto durante la operación de empuje. Nota 9) El consumo máximo de energía momentánea (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Dicho valor puede utilizarse para la selección del suministro eléctrico. Nota 10) Únicamente con bloqueo. Nota 11) Para un actuador con bloqueo, añada el consumo de energía para el bloqueo. Motor paso a paso (Servo/24 VDC) Características técnicas de la unidad de bloqueo Nota 1) Las carreras mostradas entre ( ) y las carreras intermedias se fabrican bajo demanda. Nota 2) Horizontal: El valor máximo de la carga de trabajo para la operación de posicionamiento. Para la operación de empuje, la carga de trabajo máxima es igual a la "Carga de trabajo vertical". Para soportar la carga es necesaria una guía externa. La carga de trabajo y la velocidad de traslado reales dependerán del estado de la guía externa. Vertical: La velocidad depende de la carga de trabajo. Compruebe la "Selección del modelo" . Las cifras mostradas entre ( ) son los valores máximos de aceleración/deceleración. Ajuste estos valores a 3000 [mm/s2] máx. Nota 3) La precisión de la fuerza de empuje es del ±20% (fondo de escala). Nota 4) El rango de ajuste de la "Fuerza de empuje" varía de 35% a 85% para el modelo LEY16, de 35% a 65% para el modelo LEY25 y de 35% a 85% para el modelo LEY32. La "Fuerza de empuje" y el "Factor de trabajo" pueden variar en función del valor de ajuste. Compruebe la "Selección del modelo". Nota 5) La velocidad de empuje es la velocidad admisible para la operación de empuje. Nota 6) Resistencia a impactos. Supera la prueba de impacto tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con el actuador en el estado inicial). Resistencia a vibraciones: Supera la prueba en un rango de frecuencias entre 45 y 2000 Hz. La prueba se realizó tanto en dirección paralela como perpendicular al husillo. (La prueba se llevó a cabo con el actuador en el estado inicial). Nota 7) El consumo de energía (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Nota 8) El consumo de energía en reposo durante el funcionamiento (incluyendo el controlador) corresponde al momento en el que el actuador está detenido en la posición de ajuste, excepto durante la operación de empuje. Nota 9) El consumo máximo de energía momentánea (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Dicho valor puede utilizarse para la selección del suministro eléctrico. Nota 10) Únicamente con bloqueo. Nota 11) Para un actuador con bloqueo, añada el consumo de energía para el bloqueo. Actuador Eléctrico Tipo Deslizante – Serie LEF Compacto Fácil ajuste Altura y anchura reducidas en Los datos se pueden ajustar con sólo 2 elementos: posición y velocidad. ∗ En comparación con la serie LJ1 de SMC (carga de trabajo: 10 kg) Datos Eje 1 Nº pasos 0 Posic. 150.00 mm Velocidad 200 mm/s 50% 40 40 80 90 aprox. un LEFS16 Pantalla de la consola de programación LJ1H10 Fácil montaje del cuerpo / Reducción del tiempo de instalación Posibilidad de montar el cuerpo principal sin necesidad de retirar la cubierta externa, etc. Equipado con banda de sellado como estándar Cubre la guía, el husillo a bolas y la correa. Evita las salpicaduras de grasa y la entrada de partículas extrañas del exterior. Accionamiento por husillo a bolas Accionamiento por correa Serie LEFB Serie LEFS Carrera máx.: 2000 mm Velocidad de desplazamiento: 2000 mm/s Carga máxima de trabajo: 45 kg Repetitividad de posicionamiento: ±0.02 mm Serie Mecanismo de bloqueo de funcionamiento desactivado (opcional) Prevención de caídas en caso de corte de suministro eléctrico 18 Modelo de husillo a bolas LEFS Modelo de correa LEFB Repetitividad de Carrera Velocidad posicionamiento (mm/s) (mm) (mm) Tamaño Carga (kg) 16 10 Hasta 400 500 25 20 Hasta 600 500 32 45 Hasta 800 500 16 1 Hasta 1000 Hasta 2000 25 5 Hasta 2000 Hasta 2000 32 14 Hasta 2000 Hasta 1500 ±0.02 ∗ El tamaño corresponde al diámetro del cilindro neumático con un empuje equivalente (para el funcionamiento con husillos a bolas). ±0.1 Actuador Eléctrico Tipo Deslizante Accionamiento por Husillo a Bolas Serie LEFS16, 25, 32 Actuador eléctrico / Tipo deslizante Forma de pedido LEFS 16 100 B R 1 6N 1 Tamaño 16 25 32 Montaje del controlador — D Longitud del cable E/S Tipo de motor Tipo — Motor paso a paso (Servo/24 VDC) A Servomotor Nota) (24 VDC) — Tamaño aplicable 1 3 5 LEFS16 LEFS25 LEFS32 Tipo de controlador — Paso de husillo Símbolo LEFS16 LEFS25 LEFS32 10 mm 12 mm 16 mm A 5 mm 6 mm 8 mm B 6N 6P Nota) Productos conformes a CE q La conformidad EMC ha sido probada combinando los actuadores eléctricos de la serie LEF con los controladores de la serie LEC. La compatibilidad electromagnética depende de la configuración del panel de control del cliente y de la relación con otros equipos eléctricos y cableados. Por tanto, la conformidad con la directiva EMC no puede certificarse para aquellos componentes SMC que hayan sido incorporados al equipo del cliente bajo condiciones de trabajo reales. En consecuencia, es necesario que el cliente compruebe la conformidad con la directiva EMC de la maquinaria y del equipo como un conjunto. w Para la especificación con servomotor (24 VDC), la conformidad EMC ha sido probada instalando un kit de filtro de ruidos (LEC-NFA). Véase el kit de filtro de ruidos. Consulte el Manual de Funcionamiento de LECA para la instalación. Carrera Modelo Estándar/ Sin controlador Con controlador (NPN) Con controlador (PNP) Longitud del cable del actuador — Sin cable 8 m∗ 8 1 1.5 m 10 m∗ A 3 3m 15 m∗ B 5 5m 20 m∗ C Precaución ∗ Tabla de carreras Sin cable 1.5 m 3m 5m Actuador eléctrico / Tipo deslizante LEF Símbolo Montaje con tornillo Montaje en raíl DIN Carrera 100 100 mm ∗ Bajo demanda 800 800 mm ∗ Véase la tabla de carreras. Tipo de cable del actuador Opciones de motor — B — R Sin cable Cable robótico (cable flexible) Sin bloqueo Con bloqueo Bajo demanda. 100 200 300 400 500 600 700 800 LEFS16 LEFS25 LEFS32 ∗ También hay carreras diferentes a las anteriormente mencionadas disponibles como ejecución especial. El actuador y el controlador se venden como un paquete. Compruebe la compatibilidad de la combinación controlador-actuador. <Asegúrese de comprobar lo siguiente antes del uso> q Compruebe que la etiqueta del nº de referencia del actuador coincide con la etiqueta del controlador. w Compruebe que la configuración de E/S coincide (NPN o PNP). q w ∗ Consulte el manual de funcionamiento sobre el uso de los productos. Descárgueselo a través de nuestro sitio web http://www.smcworld.com/ 19 Actuador Eléctrico Tipo Deslizante Accionamiento por Correa – Serie LEFB16, 25, 32 Forma de pedido LEFB 16 T 500 R 1 6N 1 Tamaño 16 25 32 Montaje del controlador — D Longitud del cable E/S Tipo de motor Símbolo Tipo — Motor paso a paso (Servo/24 VDC) A Servomotor Nota) (24 VDC) Montaje con tornillo Montaje sobre raíl DIN — Tamaño aplicable Sin cable 1.5 m 3m 5m 1 3 5 LEFB16 LEFB25 LEFB32 Tipo de controlador — Paso equivalente 48 mm T 6N 6P Sin controlador Con controlador (NPN) Con controlador (PNP) Precaución Nota) Productos conformes a CE q La conformidad EMC ha sido comprobada combinando los actuadores eléctricos de la serie LEF con los controladores de la serie LEC. La normativa EMC depende de la configuración del panel de control del cliente y de la relación entre otros equipos eléctricos y cableados. Por tanto, la conformidad con la directiva EMC no puede certificarse para aquellos componentes SMC que hayan sido incorporados en el equipo del cliente bajo condiciones de trabajo reales. En consecuencia, es necesario que el cliente compruebe la conformidad con la directiva EMC de la maquinaria y del equipo como un conjunto. w Para la especificación con servomotor (24 VDC), la conformidad EMC ha sido probada instalando un kit de filtro de ruidos (LEC-NFA). Véase el kit de filtro de ruidos. Consulte el Manual de Funcionamiento de LECA para la instalación. 300 Modelo 300 300 mm 2000 2.000 mm ∗ Véase la tabla de carreras. — B 600 700 Tipo de cable del actuador Sin bloqueo Con bloqueo — R Sin cable Cable robótico (cable flexible) ∗ El actuador de accionamiento por correa no se puede utilizar para aplicaciones montadas verticalmente. Estándar/ 500 ∗ Bajo demanda Opción de motor ∗ Tabla de carreras Carrera Longitud del cable del actuador — Sin cable 8 m∗ 8 1 1.5 m 10 m∗ A 3 3m 15 m∗ B 5 5m 20 m∗ C Carrera 800 Bajo demanda. 900 1000 1200 1500 1800 2000 LEFB16 LEFB25 LEFB32 ∗ También hay carreras diferentes a las anteriormente mencionadas disponibles como ejecución especial. El actuador y el controlador se venden como un paquete. Compruebe la compatibilidad de la combinación controlador-actuador. <Asegúrese de comprobar lo siguiente antes del uso> q Compruebe que la etiqueta del actuador para el n°1 de referencia coincide con la etiqueta del controlador. w Compruebe que la configuración de E/S coincide (NPN o PNP). q w ∗ Consulte el manual de funcionamiento sobre el uso de los productos. Descárgueselo a través de nuestro sitio web. http://www.smcworld.com/ 20 Selección del Modelo Gráfica de Velocidad - Carga de Trabajo (Guía) Actuador eléctrico / Tipo deslizante Motor paso a paso (Servo/24 VDC) ∗ La siguiente gráfica muestra los valores cuando la fuerza de posicionamiento es del 100%. LEFS16/Accionamiento por husillo a bolas Horizontal Vertical 12 Paso 5: LEFS16B 10 Carga de trabajo vertical: W [kg] Carga de trabajo horizontal: W [kg] 12 8 6 4 Paso 10: LEFS16A 2 0 0 100 200 300 400 500 600 700 800 10 8 6 Paso 10: LEFS16A 2 0 900 Paso 5: LEFS16B 4 0 100 200 Velocidad: V [mm/s] 300 400 500 600 Velocidad: V [mm/s] LEFS25/Accionamiento por husillo a bolas 20 Paso 6: LEFS25B 15 10 Paso 12: LEFS25A 5 0 0 100 200 300 400 500 600 20 Paso 6: LEFS25B 15 10 5 Paso 12: LEFS25A 0 700 Actuador eléctrico / Tipo deslizante LEF Vertical Carga de trabajo vertical: W [kg] Carga de trabajo horizontal: W [kg] Horizontal 0 100 200 Velocidad: V [mm/s] 300 400 500 600 700 Velocidad: V [mm/s] LEFS32/Accionamiento por husillo a bolas Horizontal Vertical 50 Paso 8: LEFS32B Carga de trabajo vertical: W [kg] Carga de trabajo horizontal: W [kg] 50 40 30 Paso 16: LEFS32A 20 10 0 0 100 200 300 400 Velocidad: V [mm/s] 500 600 40 30 Paso 8: LEFS32B 20 10 Paso 16: LEFS32A 0 0 100 200 300 400 500 600 Velocidad: V [mm/s] 21 Selección del Modelo Gráfica de Velocidad - Carga de Trabajo (Guía) Servomotor (24 VDC) ∗ La siguiente gráfica muestra los valores cuando la fuerza de posicionamiento es del 250%. LEFS16A/Accionamiento por husillo a bolas Horizontal Vertical 12 10 Carga de trabajo vertical: W [kg] Carga de trabajo horizontal: W [kg] 12 Paso 5: LEFS16AB 8 Paso 10: LEFS16AA 6 4 2 0 0 100 200 300 400 500 600 700 800 10 8 6 4 2 0 900 Paso 5: LEFS16AB Paso 10: LEFS16AA 0 100 200 Velocidad: V [mm/s] 300 400 500 600 700 800 900 Velocidad: V [mm/s] LEFS25A/Accionamiento por husillo a bolas Vertical 20 Paso 6: LEFS25AB Carga de trabajo vertical: W [kg] Carga de trabajo horizontal: W [kg] Horizontal 15 Paso 12: LEFS25AA 10 5 0 0 100 200 300 400 500 600 700 800 20 15 10 5 Paso 12: LEFS25AA 0 900 Paso 6: LEFS25AB 0 100 200 Velocidad: V [mm/s] 300 400 500 600 700 800 900 Velocidad: V [mm/s] Motor paso a paso (Servo/24 VDC) Servomotor (24 VDC) LEFB/Accionamiento por correa LEFB/Accionamiento por correa ∗ Cuando la fuerza de posicionamiento es del 100%. ∗ Cuando la fuerza de posicionamiento es del 250%. Horizontal Horizontal LEFB32 Carga de trabajo horizontal: W [kg] Carga de trabajo horizontal: W [kg] 10 14 12 10 8 LEFB25 6 4 LEFB16 2 0 0 500 1000 Velocidad: V [mm/s] 22 1500 2000 8 6 4 LEFB25 2 0 LEFB16 0 500 1000 Velocidad: V [mm/s] 1500 2000 Selección del Modelo Momento Dinámico Admisible Actuador eléctrico / Tipo deslizante 1500 1500 1000 500 1000 500 L5 Voladizo L5 [mm] Torsor Mey 500 0 0 5 10 15 20 Masa de la pieza de trabajo [kg] 1000 500 0 0 10 20 30 40 Masa de la pieza de trabajo [kg] 2000 2000 1500 1500 1500 1000 500 1000 500 0 0 5 10 15 20 Masa de la pieza de trabajo [kg] Voladizo L3 [mm] 2000 1000 500 0 0 10 20 30 40 Masa de la pieza de trabajo [kg] 2000 2000 1500 1500 1500 1000 500 1000 500 0 0 5 10 15 Masa de la pieza de trabajo [kg] Voladizo L4 [mm] 2000 0 1 2 3 4 5 Masa de la pieza de trabajo [kg] m 1000 Voladizo L2 [mm] 1500 Voladizo L2 [mm] 1500 0 L4 0 10 20 30 40 Masa de la pieza de trabajo [kg] 1500 Voladizo L3 [mm] Voladizo L3 [mm] Mep 0 1000 500 0 0 5 10 15 20 Masa de la pieza de trabajo [kg] 2000 2000 2000 1500 1500 1500 1000 500 0 0 1 2 3 4 5 Masa de la pieza de trabajo [kg] 1000 500 0 10 15 0 5 Masa de la pieza de trabajo [kg] Voladizo L5 [mm] m 0 5 10 15 20 Masa de la pieza de trabajo [kg] 2000 0 0 2 4 6 8 10 Masa de la pieza de trabajo [kg] Voladizo L4 [mm] Flector transversal Flector m 0 500 2000 0 2 4 6 8 10 Masa de la pieza de trabajo [kg] Mer 500 1000 2000 0 L3 1000 Voladizo L1 [mm] 1500 Voladizo L1 [mm] 2000 Voladizo L4 [mm] Voladizo L2 [mm] Torsor Horizontal m LEF32 2000 0 2 4 6 8 10 Masa de la pieza de trabajo [kg] L2 LEF25 2000 0 Mey 5000 mm/s2 1000 500 0 5 10 15 20 0 Masa de la pieza de trabajo [kg] 23 Actuador eléctrico / Tipo deslizante LEF LEF16 Voladizo L5 [mm] Flector m L1 3000 mm/s2 Modelo m : Carga de trabajo [kg] Me : Momento dinámico admisible [N·m] L : Cantidad de voladizo al centro de gravedad de la pieza [mm] Mep Vertical 1000 mm/s2 Dirección de voladizo de carga Voladizo L1 [mm] Posición Aceleración Actuador Eléctrico Tipo Deslizante Accionamiento por Husillo a Bolas / Serie LEFS Motor paso a paso (Servo/24 VDC) LEFS16 LEFS25 LEFS32 100, 200, 300 (400) 100, 200, 300 (400), 500, (600) 100, 200, 300, (400) 500, (600, 700, 800) Características eléctricas Características técnicas de la unidad de bloqueo Velocidad [mm/s] Nota 2) 10 20 20 40 2 4 7.5 15 10 20 10 a 500 5 a 250 12 a 500 6 a 250 16 a 500 8 a 250 10 5 12 16 8 45 ±0.02 Repetitividad de posicionamiento [mm] Paso [mm] Resistencia a impactos/vibraciones [m/s2] Nota 3) 6 50/20 Husillo a bolas Tipo de actuación Guía lineal Tipo de guiado Rango de temp. de trabajo [°C] 5 a 40 (sin congelación ni condensación) Rango de humedad de trabajo [%] 35 a 85 (sin congelación ni condensación) �28 �42 �56.4 Dimensiones del motor Motor paso a paso (Servo/24 VDC) Tipo de motor Fase A/B incremental (800 pulsos/giro) Encoder 24 VDC ±10% Tensión nominal [V] Consumo de energía [W] Nota 4) Consumo de energía en reposo durante el funcionamiento [W] Nota 5) Consumo energía máx. momentánea [W] Nota 6) Peso del controlador [kg] 22 38 50 18 16 44 51 57 123 0.15 (Montaje con tornillo), 0.17 (Montaje en raíl DIN) Tipo Nota 7) Modelo de funcionamiento desactivado Fuerza de retención (N) 20 Consumo de energía [W] Nota 8) 39 78 157 3.6 108 5 216 5 24 VDC ±10% Tensión nominal [V] Características técnicas del actuador Carrera [mm] Nota 1) Velocidad [mm/s] LEFS16A LEFS25A 100, 200, 300 (400) 100, 200, 300 (400), 500, (600) 7 10 11 2 4 2.5 5 10 a 500 5 a 250 12 a 500 6 a 250 10 5 Horizontal Carga de trabajo [kg] Nota 2) Vertical 18 ±0.02 Repetitividad de posicionamiento [mm] Paso [mm] Resistencia a impactos/vibraciones [m/s2] Nota 3) 6 12 50/20 Husillo a bolas Tipo de actuación Guía lineal Tipo de guiado Rango de temp. de trabajo [°C] 5 a 40 (sin congelación ni condensación) Rango de humedad de trabajo [%] 35 a 85 (sin congelación ni condensación) Dimensiones del motor Potencia Motor [W] �28 �42 30 36 Servomotor (24 VDC) Tipo de motor Fase A/B incremental (800 pulsos/giro)/Fase Z Encoder 24 VDC ±10% Tensión nominal [V] Consumo de energía [W] Nota 4) Consumo de energía en reposo durante el funcionamiento [W] Nota 5) Consumo de energía máx. momentánea [W] Nota 6) Peso del controlador [kg] Tipo Nota 7) Consumo de energía [W] Nota 8) Tensión nominal [V] Modelo Carrera [mm] 63 Horizontal 4/ Vertical 9 70 102 Horizontal 4/ Vertical 9 113 0.15 (Montaje con tornillo), 0.17 (Montaje en raíl DIN) Modelo de funcionamiento desactivado Fuerza de retención (N) LEFS16 20 39 78 3.6 157 5 24 VDC ±10% LEFS25 LEFS32 100 200 300 (400) 100 200 300 (400) 500 (600) 100 200 300 (400) 500 (600) (700) (800) Peso del producto [kg] 0.90 1.05 1.20 1.35 1.84 2.12 2.40 2.68 2.96 3.24 3.35 3.75 4.15 4.55 4.95 5.35 5.75 6.15 Peso adicional con bloqueo [kg] 24 9 Horizontal Carga de trabajo [kg] Nota 2) Vertical Modelo Características eléctricas Nota 1) Las carreras mostradas entre ( ) se fabrican bajo demanda. Nota 2) Compruebe la "Gráfica de velocidad–carga de trabajo (Guía)". Nota 3) Resistencia a impactos. Supera la prueba de impacto tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con el actuador en el estado inicial). Resistencia a vibraciones: Supera la prueba en un rango de frecuencias entre 45 y 2000 Hz. La prueba se realizó tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con el actuador en el estado inicial). Nota 4) El consumo de energía (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Nota 5) El consumo de energía en reposo durante el funcionamiento (incluyendo el controlador) corresponde al momento en el que el actuador está detenido en la posición de ajuste. Nota 6) El consumo máximo de energía momentánea (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Dicho valor puede utilizarse para la selección del suministro eléctrico. Nota 7) Únicamente con bloqueo. Nota 8) Para un actuador con bloqueo, añada el consumo de energía para el bloqueo. Carrera [mm] Nota 1) Servomotor (24 VDC) Características técnicas de la unidad de bloqueo Nota 1) Las carreras mostradas entre ( ) se fabrican bajo demanda. Nota 2) La velocidad depende de la carga de trabajo. Compruebe la "Gráfica de velocidad–carga de trabajo (Guía)". Nota 3) Resistencia a impactos. Supera la prueba de impacto tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con el actuador en el estado inicial). Resistencia a vibraciones: Supera la prueba en un rango de frecuencias entre 45 y 2000 Hz. La prueba se realizó tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con el actuador en el estado inicial). Nota 4) El consumo de energía (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Nota 5) El consumo de energía en reposo durante el funcionamiento (incluyendo el controlador) corresponde al momento en el que el actuador está detenido en la posición de ajuste. Nota 6) El consumo máximo de energía momentánea (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Dicho valor puede utilizarse para la selección del suministro eléctrico. Nota 7) Únicamente con bloqueo. Nota 8) Para un actuador con bloqueo, añada el consumo de energía para el bloqueo. Características técnicas del actuador Modelo 0.12 0.19 0.35 Actuador Eléctrico Tipo Deslizante Accionamiento por Correa / Serie LEFB Actuador eléctrico / Tipo deslizante Motor paso a paso (Servo/24 VDC) Características eléctricas Características técnicas de la unidad de bloqueo LEFB25 Peso del controlador [kg] Tipo Nota 7) Fuerza de retención (N) Consumo de energía [W] Nota 8) Tensión nominal [V] LEFB32 0.15 (Montaje con tornillo), 0.17 (Montaje en raíl DIN) Modelo de funcionamiento desactivado 36 4 19 5 5 3.6 24 VDC ±10% Modelo LEFB16A LEFB25A (300), 500, (600, 700) (300), 500, (600,700), 800, (900) 800, (900), 1000 1000, (1200, 1500, 1800, 2000) 1 2 Carga de trabajo [kg] Nota 2) Horizontal 48 a 2000 48 a 2000 Velocidad [mm/s] ±0.1 Repetitividad de posicionamiento [mm] 48 48 Paso equivalente [mm] 50/20 Resistencia a impactos/vibraciones [m/s2] Nota 3) Correa Tipo de actuación Guía lineal Tipo de guiado 5 a 40 (sin condensación ni congelación) Rango de temp. de trabajo [°C] Rango de humedad de trabajo [%] 35 a 85 (sin condensación ni congelación) �28 �42 Dimensiones del motor 30 36 Potencia Motor [W] Servomotor (24 VDC) Tipo de motor Fase A/B incremental (800 pulsos/giro)/Fase Z Encoder 24 VDC ±10% Tensión nominal [V] 78 69 Consumo de energía [W] Nota 4) Consumo de energía en reposo 5 Horizontal 4 Horizontal durante el funcionamiento [W] Nota 5) 87 120 Consumo de energía máx. momentánea [W] Nota 6) Peso del controlador [kg] 0.15 (Montaje con tornillo), 0.17 (Montaje en raíl DIN) Tipo Nota 7) Modelo de funcionamiento desactivado Fuerza de retención (N) 4 19 Consumo de energía [W] Nota 8) 3.6 5 Tensión nominal [V] 24 VDC ±10% Características técnicas del actuador Actuador eléctrico / Tipo deslizante LEF Servomotor (24 VDC) Características eléctricas Nota 1) Las carreras mostradas entre ( ) se fabrican bajo demanda. Nota 2) Compruebe la "Gráfica de velocidad–carga de trabajo (Guía)". Nota 3) Resistencia a impactos. Supera la prueba de impacto tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con el actuador en el estado inicial). Resistencia a vibraciones: Supera la prueba en un rango de frecuencias entre 45 y 2000 Hz. La prueba se realizó tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con el actuador en el estado inicial). Nota 4) El consumo de energía (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Nota 5) El consumo de energía en reposo durante el funcionamiento (incluyendo el controlador) corresponde al momento en el que el actuador está detenido en la posición de ajuste. Nota 6) El consumo máximo de energía momentánea (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Dicho valor puede utilizarse para la selección del suministro eléctrico. Nota 7) Únicamente con bloqueo. Nota 8) Para un actuador con bloqueo, añada el consumo de energía para el bloqueo. LEFB16 (300), 500, (600, 700) (300), 500, (600,700), 800, (900) (300), 500, (600,700), 800, (900) Carrera [mm] 800, (900), 1000 1000, (1200, 1500, 1800, 2000) 1000, (1200, 1500, 1800, 2000) 1 5 14 Carga de trabajo [kg] Nota 2) Horizontal 48 a 1100 48 a 1400 48 a 1500 Velocidad [mm/s] Nota 2) ±0.1 Repetitividad de posicionamiento [mm] 48 48 48 Paso equivalente [mm] 50/20 Resistencia a impactos/vibraciones [m/s2] Nota 3) Correa Tipo de actuación Guía lineal Tipo de guiado 5 a 40 (sin condensación ni congelación) Rango de temp. de trabajo [°C] 35 a 85 (sin condensación ni congelación) Rango de humedad de trabajo [%] �28 �42 �56.4 Dimensiones del motor Motor paso a paso (Servo/24 VDC) Tipo de motor Fase A/B incremental (800 pulsos/giro) Encoder 24 VDC ±10% Tensión nominal [V] 24 32 52 Consumo de energía [W] Nota 4) Consumo de energía en reposo 18 16 44 durante el funcionamiento [W] Nota 5) 51 60 127 Consumo de energía máx. momentánea [W] Nota 6) Nota 1) Características técnicas de la unidad de bloqueo Nota 1) Las carreras mostradas entre ( ) se fabrican bajo demanda. Nota 2) La velocidad depende de la carga de trabajo. Compruebe la "Gráfica de velocidad–carga de trabajo (Guía)". Nota 3) Resistencia a impactos. Supera la prueba de impacto tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con el actuador en el estado inicial). Resistencia a vibraciones: Supera la prueba en un rango de frecuencias entre 45 y 2000 Hz. La prueba se realizó tanto en dirección paralela como perpendicular al tornillo de paso. (La prueba se llevó a cabo con el actuador en el estado inicial). Nota 4) El consumo de energía (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Nota 5) El consumo de energía en reposo durante el funcionamiento (incluyendo el controlador) corresponde al momento en el que el actuador está detenido en la posición de ajuste. Nota 6) El consumo máximo de energía momentánea (incluyendo el controlador) corresponde al momento en el que el actuador está funcionando. Dicho valor puede utilizarse para la selección del suministro eléctrico. Nota 7) Únicamente con bloqueo. Nota 8) Para un actuador con bloqueo, añada el consumo de energía para el bloqueo. Características técnicas del actuador Modelo Carrera [mm] Nota 1) Modelo LEFB16 Peso adicional con bloqueo [kg] Carrera [mm] (300) 500 (600) (700) 800 (900) 1000 Peso producto [kg] 1.19 1.45 1.58 1.71 1.84 1.97 2.10 Modelo 0.12 LEFB25 Carrera [mm] (300) 500 (600) (700) 800 (900) 1000 (1200) (1500) (1800) (2000) Peso producto [kg] 2.39 2.85 3.08 3.31 3.54 3.77 4.00 4.46 5.15 5.84 6.30 Modelo LEFB32 Carrera [mm] (300) 500 (600) (700) 800 (900) 1000 (1200) (1500) (1800) (2000) Peso producto [kg] 4.12 4.80 5.14 5.48 5.82 6.16 6.50 7.18 8.20 9.22 9.90 Peso adicional con bloqueo [kg] 0.19 Peso adicional con bloqueo [kg] 0.35 25 Controlador del motor paso a paso (Servo/24 VDC) – Serie LECP6 Controlador del servomotor (24 VDC) – Serie LECA6 Forma de pedido LE C P 6 N Precaución Nota 1) Productos conformes a CE q La conformidad EMC ha sido comprobada combinando los actuadores eléctricos de la serie LEF con los controladores de la serie LEC. La normativa EMC depende de la configuración del panel de control del cliente y de la relación entre otros equipos eléctricos y cableados. Por tanto, la conformidad con la directiva EMC no puede certificarse para aquellos componentes SMC que hayan sido incorporados en el equipo del cliente bajo condiciones de trabajo reales. En consecuencia, es necesario que el cliente compruebe la conformidad con la directiva EMC de la maquinaria y del equipo como un conjunto. w Para la serie LECA6 (controlador de servomotor), la conformidad EMC ha sido probada instalando un kit de filtro de ruidos (LEC-NFA). Véase el kit de filtro de ruidos en la pág. 28. Consulte el Manual de Funcionamiento de LECA para la instalación. Actuador Controlador Serie LECP6 Referencia del actuador Motor compatible P Motor paso a paso (Servo/24 VDC) A Servomotor (24 VDC) Nota 1) Nº de datos de paso 6 64 puntos Tipo E/S en paralelo N NPN P PNP Serie LECA6 (Excepto las características técnicas del cable y las opciones del actuador) Ejemplo: Introduzca [LEFS16A-400] para el modelo LEFS16A-400-R16N1 Opción Long. cable E/S — 1 3 5 — Montaje con tornillo D Nota 2) Montaje en raíl DIN Sin cable 1.5 m 3m 5m Nota 2) El raíl DIN no está incluido. Pídalo por separado. ∗ Si selecciona el modelo equipado con controlador (-P6��) durante el pedido de la serie LE, no necesita pedir este controlador. El controlador se vende como una unidad independiente tras el ajuste de un actuador compatible. Compruebe la compatibilidad de la combinación controlador-actuador. <Asegúrese de comprobar lo siguiente antes del uso> q Compruebe que la etiqueta del nº de referencia de actuador coincide con la etiqueta del controlador. w Compruebe que la configuración de E/S coincide (NPN o PNP). q w Características técnicas Características técnicas básicas Elemento Motor compatible LECP6 LECA6 Motor paso a paso HB bifásico de tipo conexión unipolar Servomotor AC Suministro eléctrico Nota 1) Tensión de alimentación: 24 VDC ±10% Consumo de corriente: 3 A (máx. 5 A) Nota 2) Tensión de alimentación: 24 VDC ±10% Consumo de corriente: 3 A (máx. 10 A) Nota 2) [Incluyendo la alimentación del accionamiento del motor, la alimentación de control y el desbloqueo] [Incluyendo la alimentación del accionamiento del motor, la alimentación de control y el desbloqueo] Entrada en paralelo Salida en paralelo 11 entradas (aislamiento fotoacoplador) 13 salidas (aislamiento fotoacoplador) Encoder Comunicación en serie Memoria LED indicador Control de bloqueo Longitud de cable (m) Sistema refrigerador Rango de temperatura de trabajo (°C) Rango de humedad de trabajo (%) Rango temp. almacenamiento (°C) Rango humedad almacenamiento (%) Resistencia al aislamiento (MΩ) Peso (g) Fase A/B, Entrada del receptor de línea Resolución 800 p/r Fase A/B/Z, Entrada del receptor de línea Resolución 800 p/r RS485 (según protocolo Modbus) EEPROM LED (verde) y LED (rojo) Terminal de desbloqueo forzado Cable E/S: 5 o menos Cable del actuador: 20 o menos Refrigeración por aire natural 0 a 40 (sin condensación ni congelación) 35 a 85 (sin condensación ni congelación) –10 a 60 (sin condensación ni congelación) 35 a 85 (sin condensación ni congelación) Entre la carcasa (aleta de radiación) y el terminal SG 50 (500 VDC) 150 (Montaje con tornillo) 170 (Montaje en raíl DIN) Nota 1) No utilice un suministro eléctrico de "tipo prevención de la corriente de entrada" para suministrar alimentación al controlador. Nota 2) El consumo eléctrico varía en función del modelo de actuador. Consulte las características técnicas del actuador para ver más detalles. 26 Accessorios Cables Controlador [Cable del actuador para el motor paso a paso (Servo/24 VDC)] 1 LE-CP- 35/Longitud de cable: 1.5 m, 3 m, 5 m 1 (Nº de terminal) 1 2 5 6 (13.5) (18) A6 B6 (14.7) (11) Lado del controlador (∗ Bajo demanda) Conector C Lado del actuador (13.5) 1 (Nº de terminal) A1 B1 /Longitud de cable: 8 m, 10 m, 15 m, 20 m (Nº de terminal) 1 2 5 6 2 15 Conector D L (14.2) (14) (10) 8B AC LE-CP- ∗ Bajo demanda (14) ø8 Conector A (30.7) 16 (30.7) (10) Conector A (18) 6 (14.2) ø5.5 2 5 ø6.3 1 Conector C Lado del actuador (17.7) Longitud del cable (L) 1.5 m 1 3m 3 5m 5 8 m∗ 8 10 m∗ A 15 m∗ B 20 m∗ C Lado del controlador (17.7) LE CP Conector D L (Nº de terminal) A1 B1 A6 B6 (14.7) (11) [Cable del actuador con bloqueo y sensor para el motor paso a paso (Servo/24 VDC)] 1 LE CP 1 B LE-CP- 35/Longitud de cable: 1.5 m, 3 m, 5 m Lado del controlador Lado del actuador (18) (Nº de terminal) A1 B1 A6 A1 A3 (11) B6 B1 B3 (14.7) Conector C (14.2) Conector B (30.7) Conector D L (18) 16 (10) Lado del controlador (14) Conector A (10.2) (17.7) 15 ø8 (14) Lado del actuador Con bloqueo y sensor (14.2) /Longitud de cable: 8 m, 10 m, 15 m, 20 m (∗ Bajo demanda) (Nº de terminal) 1 2 5 6 (13.5) 1 2 ∗ Bajo demanda Conector D L ø5.5 LE-CP- 8B AC Conector B (30.7) ø5.7 16 (10) ø6.3 15 Conector C ø5.7 Longitud del cable (L) 1.5 m 1 3m 3 5m 5 8 m∗ 8 10 m∗ A 15 m∗ B 20 m∗ C Conector A (10.2) (17.7) (Nº de terminal) 1 2 5 6 (13.5) 1 2 (11) (Nº de terminal) A1 B1 A6 A1 A3 B6 B1 B3 (14.7) [Cable del actuador para el servomotor (24 VDC)] LE-CA-� 1 2 15 (ø6.5) (14.2) (Nº de terminal) (16.6) 321 1 4 16 (30.7) (10) Conector B ∗ Bajo demanda Conector C Conector A AB (18) (13.5) (23.7) (5.6) (Nº de terminal) 1 2 3 4 (ø6.5) Longitud del cable (L) 1.5 m 1 3m 3 5m 5 8 m∗ 8 10 m∗ A 15 m∗ B 20 m∗ C L (14.7) (11) Conector D [Cable del actuador con bloqueo y sensor para el servomotor (24 VDC)] LE-CA-�-B B ∗ Bajo demanda 1 2 15 16 (10) Conector C (14.2) (10.5) Conector A2 (Nº de terminal) (16.6) 321 1 4 (30.7) Conector B (18) (13.5) (23.7) ø6.5 (Nº de terminal) 1 2 3 4 Conector A1 ø6.5 Lado del controlador (30.7) ø5.7 Longitud del cable (L) 1.5 m 1 3m 3 5m 5 8 m∗ 8 10 m∗ A 15 m∗ B 20 m∗ C Lado del actuador (5.6) 1 (10.2) (12.7) LE CA L (11) 1 3 AB AB (14.7) Conector D Con bloqueo y sensor 27 Controlador LEC Lado del controlador Lado del actuador (10.5) 1 (12.7) LE CA Accessorios Serie LECP6/LECA6 [Cable E/S] Lado del PLC Lado del controlador ø8.9 Longitud del cable (L) 1.5 m 1 3m 3 5m 5 1 A1 L (14.4) ∗ Tamaño de conductor: AWG28 (Nº de terminal) B1 A1 A13 B1 (22.4) LEC CN5 Nº de pin del conector A1 A2 A3 A4 A5 A6 A7 A8 A9 A10 A11 A12 A13 B13 Color del Marca en Color de el cable la marca cable Negro Marrón claro Rojo Marrón claro Negro Amarillo Rojo Amarillo Negro Verde claro Rojo Verde claro Negro Gris Rojo Gris Negro Blanco Rojo Blanco Negro Marrón claro Rojo Marrón claro Negro Amarillo Software de ajuste del controlador / LEC-W1 Nº de pin del conector B1 B2 B3 B4 B5 B6 B7 B8 B9 B10 B11 B12 B13 — Color del Marca en cable el cable Amarillo Verde claro Verde claro Gris Gris Blanco Blanco Marrón claro Marrón claro Amarillo Amarillo Verde claro Verde claro Tierra B13 A13 Color de la marca Rojo Negro Rojo Negro Rojo Negro Rojo Negro Rojo Negro Rojo Negro Rojo Forma de pedido q Software configuración del controlador LEC W1 Software de configuración del controlador (disponible en japonés e inglés) Contenido w Cable de comunicación r Cable USB q Software de configuración del controlador (CD-ROM) e Unidad de conversión PC w Cable de comunicación (Cable entre el controlador y la unidad de conversión) e Unidad de conversión r Cable USB (Cable entre el PC y la unidad de conversión) Consola de programación / LEC-T1 Conmutador de habilitación (opcional) Forma de pedido LEC T1 3 J G Consola de programación Seta de emergencia Longitud de cable 3m 3 Idioma inicial J Japonés Inglés E 28 Conmutador de habilitación — S Ninguna Equipado con conmutador de habilitación ∗ Conmutador de interlock para función de prueba con control manual (JOG) Conmutador de parada G Equipado con seta de emergencia Conceptos básicos de programación Conceptos de programación Conceptos básicos de programación Operación de posicionamiento Operación de empuje El actuador se mueve hacia la posición objetivo especificada en los datos de paso de "Posición" De forma similar a la operación de posicionamiento, el actuador se mueve conforme a los ajustes de "Posición" y "Velocidad" en los datos de paso. Así, cuando alcance la posición objetivo, comenzará el proceso de empuje. El actuador empuja la carga con una fuerza no superior a la fuerza máxima establecida en la "Fuerza de empuje" PARÁMETROS CLAVE • Área 1, Área 2: La señal de salida AREA se activa dentro del rango [Área 1, Área 2] • Posición de entrada: cuando el actuador eléctrico entra en el rango de [Pos. entrada], la señal de salida INP se activa. PARÁMETROS CLAVE • Posición de entrada: la distancia de traslado (valor relativo) durante el empuje. Si se supera la distancia de traslado, el producto se detiene, incluso si no se encuentra en una operación de empuje (en ese caso, la salida INP no se activará, haciendo que el empuje resulte incompleto). • Disparador LV: la condición en la que se activa la salida INP. Ajústela a un valor equivalente a la fuerza de empuje o inferior. • Fuerza de empuje: factor de fuerza de empuje • Velocidad de empuje: velocidad de empuje durante el modo de empuje Velocidad Velocidad Aceleración Deceleración Aceleración Velocidad Deceleración Velocidad Posición 25 Velocidad de empuje 50 Fuerza Posición de entrada Salida INP ON OFF ON Salida ÁREA OFF ON OFF 0 Posición 50 20 Fuerza de empuje Disparador LV Posición de entrada 50 15 1 Salida INP ON OFF ON Conceptos Programación 5 Ejemplo de activación de señales del PLC para cada posición Posición 1 IN 5 OFF 0 IN 4 OFF 0 IN 3 OFF 0 IN 2 OFF 0 IN 1 OFF 0 IN 0 ON 1 IN 4 OFF 0 IN 3 OFF 0 IN 2 ON 1 IN 1 OFF 0 IN 0 ON 1 Posición 5 IN 5 OFF 0 29 Conceptos básicos de programación Consejos de programación Uso de posiciones absolutas y relativas En caso necesario, las posiciones absolutas se pueden combinar de diferentes formas con las posiciones relativas para conseguir más de 64 posiciones. Por ejemplo: se pueden obtener 153,2 mm con una secuencia de las 3 posiciones siguientes: Velocidad Aceleración Deceleración Velocidad 150 3 0.2 Posición de entrada Salida INP ON Absoluta: 150 mm Relativa: 3 mm Relativa: 0.2 mm Posición de entrada ON ON ON Simplificado salto de ciclos cuando no hay ninguna carga La secuencia cuando no existe ninguna carga se puede simplificar fácilmente usando un Disparador LV para impedir la activación de la señal de salida INP. Esto puede utilizarse para modificar la secuencia y evitar la existencia de ciclos sin piezas de trabajo, así como para mejorar la productividad de su sistema. Activar una señal sin detener el actuador Use las funciones de área para activar una señal entre 2 puntos sin tener que detener el actuador. Esto permitirá llevar a cabo otros procesos y, en algunas aplicaciones, reducir el tiempo del ciclo. En los sistemas de impresión, por ejemplo, la posición inicial y final de la longitud de impresión se puede controlar con los ajustes "Área 1" y "Área 2", sin necesidad de detener el actuador. Limitar la fuerza máxima en caso necesario Si, en ciertos pasos de sus aplicaciones, desea reducir los riesgos para los operarios o para componentes esenciales de la máquina, es posible reducir la fuerza durante el posicionamiento del actuador hasta un nivel adecuado. 30 www.smc.eu EACT-01A-ES SMC CORPORATION (Europe) Austria Belgium Bulgaria Croatia Czech Republic Denmark Estonia Finland France Germany Greece Hungary Ireland Italy Latvia +43 2262622800 +32 (0)33551464 +359 29744492 +385 13776674 +420 541424611 +45 70252900 +372 6510370 +358 207513513 +33 (0)164761000 +49 (0)61034020 +30 210 2717265 +36 23511390 +353 (0)14039000 +39 (0)292711 +371 67817700 SMC CORPORATION www.smc.at www.smcpneumatics.be www.smc.bg www.smc.hr www.smc.cz www.smcdk.com www.smcpneumatics.ee www.smc.fi www.smc-france.fr www.smc-pneumatik.de www.smchellas.gr www.smc.hu www.smcpneumatics.ie www.smcitalia.it www.smclv.lv office@smc.at info@smcpneumatics.be office@smc.bg office@smc.hr office@smc.cz smc@smcdk.com smc@smcpneumatics.ee smcfi@smc.fi contact@smc-france.fr info@smc-pneumatik.de sales@smchellas.gr office@smc.hu sales@smcpneumatics.ie mailbox@smcitalia.it info@smclv.lv Lithuania Netherlands Norway Poland Portugal Romania Russia Slovakia Slovenia Spain Sweden Switzerland Turkey UK +370 5 2308118 +31 (0)205318888 +47 67129020 +48 222119600 +351 226166570 +40 213205111 +7 8121185445 +421 413213212 +386 73885412 +34 945184100 +46 (0)86031200 +41 (0)523963131 +90 (0)2124440762 +44 (0)845 121 5122 www.smclt.lt www.smcpneumatics.nl www.smc-norge.no www.smc.pl www.smc.eu www.smcromania.ro www.smc-pneumatik.ru www.smc.sk www.smc.si www.smc.eu www.smc.nu www.smc.ch www.entek.com.tr www.smcpneumatics.co.uk info@smclt.lt info@smcpneumatics.nl post@smc-norge.no office@smc.pl postpt@smc.smces.es smcromania@smcromania.ro info@smc-pneumatik.ru office@smc.sk office@smc.si post@smc.smces.es post@smcpneumatics.se info@smc.ch smc@entek.com.tr sales@smcpneumatics.co.uk Akihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPAN Phone: 03-5207-8249 FAX: 03-5298-5362 1st printing OS printing OS 00 Printed in Spain Specifications are subject to change without prior notice and any obligation on the part of the manufacturer.