PUENTE PLUMA
Anuncio

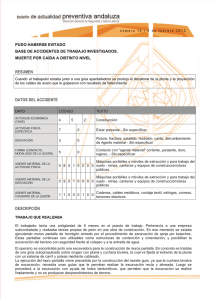
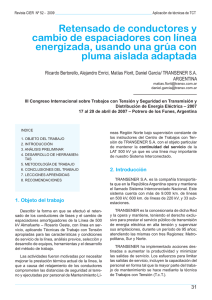
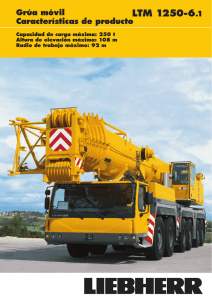
CONTROL DE UNA PLUMA GRUA RESUMEN El presente proyecto realiza el control de los movimientos de una pluma grúa prototipo mediante una interfaz con un computador utilizando el protocolo RS232. En el programa implementado en el computador en Visual Basic 6.0 se selecciona una posición del objeto de prueba actual y la posición deseada o final para que luego de ordenar la acción el cuerpo sea movido hacia el destino seleccionado por el operador . INTRODUCCION En la actualidad la construcción de edificios de gran altura en el área urbana se utilizan plumas grúa para elevar los materiales hacia los pisos superiores, en estas grúas se tienen grandes motores de inducción que realizan estos movimientos ESTRUCTURA MECANICA La pluma grúa esta constituida principalmente por -pluma -contrapluma -carro de pluma -base -contrapeso -corona de giro Además la pluma grúa tiene tres movimientos proporcionados por los motores • Motor de elevación: Movimiento vertical de la carga. • Motor de distribución: Movimiento del carro a lo largo de la pluma. • Motor de orientación: Giro de 360º, en el plano horizontal, de la estructura superior de la grúa. 1 HARDWARE .Los motores que permiten el movimiento de la pluma grúa son motores de pasos unipolares dispuestos de la siguiente manera Por lo tanto el hardware consta de 3 placas de potencia para los motores con transistores TIP 120, 1 placa de comunicación RS-232 utilizando un max232 1 placa de control donde se encuentra el microcontrolador PIC16F877A 1 placa para activar el electroimán mediante un rele. El hardware esta diseñado para ser manejado por el software que se necesite para el funcionamiento, siendo flexible así para cualquier mejora del software o facilitar la detección de una avería inspeccionando etapa por etapa las placas en forma separada SOFTWARE El programa del microcontrolador se realizó en PICBASIC y consta de un lazo que permite decodificar las instrucciones enviadas vía serial por el computador y activar en forma secuencial los pines que manejan los motores para que la pluma grúa se mueva a la posición deseada. El programa del computador se lo realizo en Visual Basic este mediante una interfaz grafica permite al operador ubicar la posición de la carga de prueba y seleccionar a donde se quiere mover esta; el programa calcula el numero de pasos que debe dar cada motor para llegar a la posición deseada y lo transmite al microcontrolador mediante vía serial utilizando los datos siguientes Motor orientación 1000 secuencias para 360 grados Motor elevación 395 secuencias para subir y bajar el electroimán Motor distribución 295 secuencias para que el carro se mueva 30cm hacia fuera o hacia adentro. CONCLUSIONES Los motores de pasos son la mejor opción para este prototipo por su facilidad para controlar la posición y tener un buen torque; para una aplicación real se deberían utilizar servomotores AC. Los anillos rozantes permiten un movimiento en los 360 grados pero los carbones de estos están sometidos a desgaste por lo que deben ser revisados y de ser necesario sustituidos periódicamente BIBLIOGRAFÍA [1] Instrumentación industrial, Dr Luis Corrales [2] Manual de usuario, PICBASIC [3] Data sheet, PIC16F877A, Microchip [4] C. Reyes, Aprenda a programar PICs fácilmente 2